
Cotton Blight Identification with Ground Framed Canopy Photo-Assisted Multispectral UAV Images

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
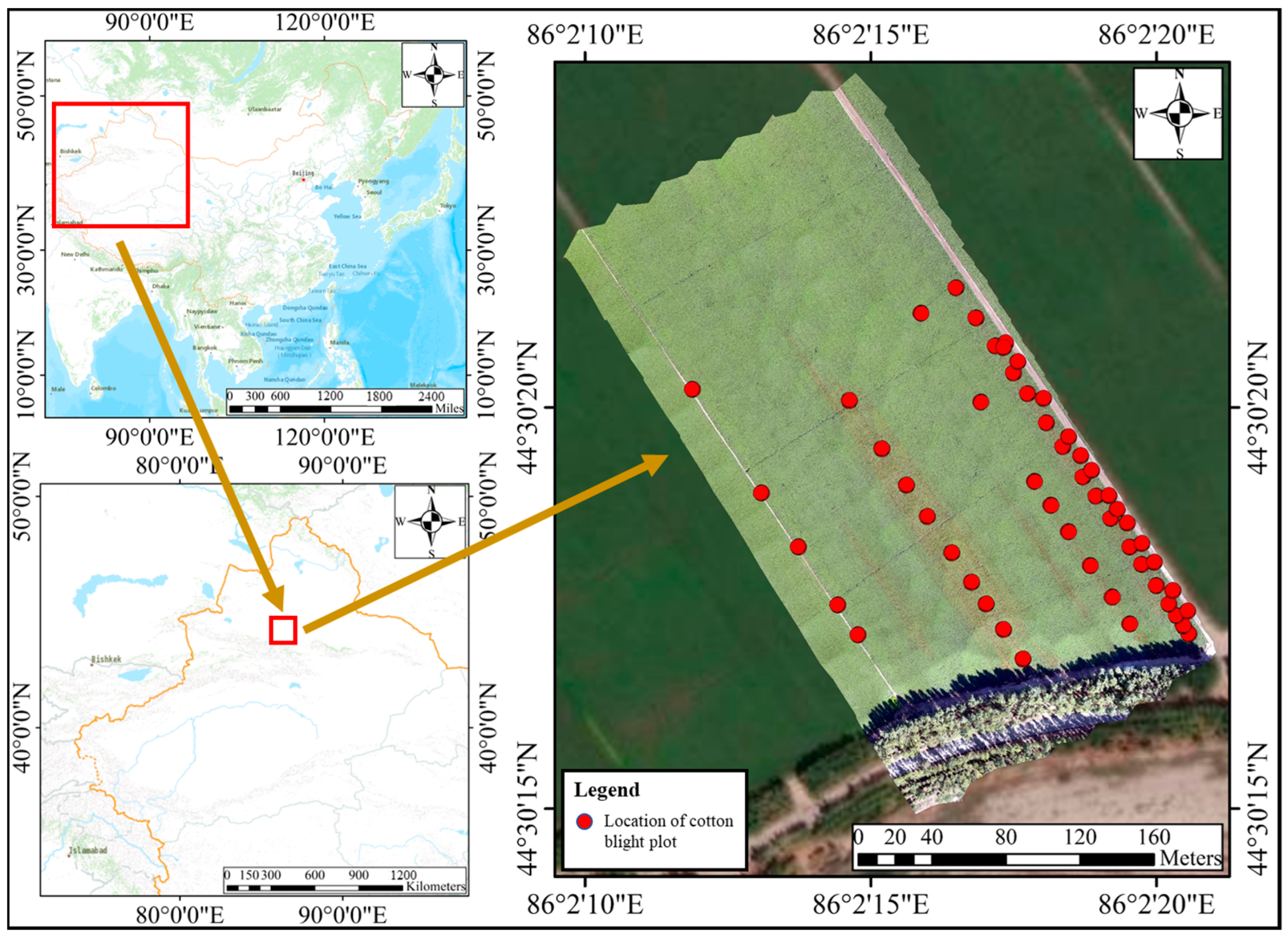
2.1. Overview of the Study Area
2.2. Multispectral UAV Data Acquisition and Preprocessing
2.2.1. Data Acquisition
2.2.2. Data Preprocessing
2.2.3. Collection of Blight-Infected Canopy Information from Ground Framed Plots
2.2.4. Training and Testing Samples
2.3. Methods
2.3.1. Extraction of Spectral Bands of Ground Framed Samples
2.3.2. Multiple Regression Analysis and Validation
2.3.3. Classification of Blight Infection Severity
3. Results
3.1. Cotton Blight-Infected Severity and Distribution
3.2. Changes in Spectral Bands of Cotton Blight Infection
3.3. The Cotton Blight Infection Inversion Model
4. Discussion
4.1. Improvement of UAV Image-Based Identification of Blight Infection
4.2. Spectral Analysis of Cotton Diseases
4.3. Prospects for Agricultural Disease Identification
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xun, L.; Zhang, J.H.; Cao, D.; Yang, S.S.; Yao, F.M. A novel cotton mapping index combining Sentinel-1 SAR and Sentinel-2 multispectral imagery. ISPRS J. Photogramm. 2021, 181, 148–166. [Google Scholar] [CrossRef]
- Feng, L.; Chi, B.J.; Dong, H.Z. Cotton cultivation technology with Chinese characteristics has driven the 70-year development of cotton production in China. J. Integr. Agric. 2022, 21, 597–609. [Google Scholar] [CrossRef]
- Kalischuk, M.; Paret, M.L.; Freeman, J.H.; Raj, D.; Da Silva, S.; Eubanks, S.; Wiggins, D.J.; Lollar, M.; Marois, J.J.; Mellinger, H.C.; et al. An Improved Crop Scouting Technique Incorporating Unmanned Aerial Vehicle–Assisted Multispectral Crop Imaging into Conventional Scouting Practice for Gummy Stem Blight in Watermelon. Plant Dis. 2019, 103, 1642–1650. [Google Scholar] [CrossRef]
- Kevin, L.C.; Kevin, B.; Terry, W.; Ping, H.; Libo, S. Return of old foes—Recurrence of bacterial blight and Fusarium wilt of cotton. Curr. Opin. Plant Biol. 2019, 50, 95–103. [Google Scholar]
- Chen, B.H.; Ouyang, Y.C.; Ou-Yang, M.; Guo, H.Y.; Liu, T.S.; Chen, H.M.; Wu, C.C.; Wen, C.H.; Chang, C.I.; Shih, M.S. Fusarium Wilt Inspection for Phalaenopsis Using Uniform Interval Hyperspectral Band Selection Techniques. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 2831–2834. [Google Scholar]
- Gregorio-Cipriano, R.; De Luna, E.; Gonzalez, D. An assay for the quantification of pathogenicity and virulence of two strains of Podosphaera xanthii (Erysiphaceae) on different hosts from digital images. Sydowia 2022, 74, 277–286. [Google Scholar]
- Zhang, S.W.; Wu, X.W.; You, Z.H.; Zhang, L.Q. Leaf image based cucumber disease recognition using sparse representation classification. Comput. Electron. Agric. 2017, 134, 135–141. [Google Scholar] [CrossRef]
- Trivedi, V.K.; Shukla, P.K.; Pandey, A. Automatic segmentation of plant leaves disease using min-max hue histogram and k-mean clustering. Multimed. Tools Appl. 2022, 81, 20201–20228. [Google Scholar] [CrossRef]
- Soubry, I.; Patias, P.; Tsioukas, V. Monitoring vineyards with UAV and multi-sensors for the assessment of water stress and grape maturity. Unmanned Syst. 2017, 5, 37–50. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Peres, E.; Morais, R.; Sousa, J. Multi-Temporal Vineyard Monitoring through UAV-Based RGB Imagery. Remote Sens. 2018, 10, 1907. [Google Scholar] [CrossRef]
- Ampatzidis, Y.; Partel, V.; Meyering, B.; Albrecht, U. Citrus rootstock evaluation utilizing UAV-based remote sensing and artificial intelligence. Comput Electron Agric. 2019, 164, 104900. [Google Scholar] [CrossRef]
- Ahmadi, P.; Mansor, S.; Farjad, B.; Ghaderpour, E. Unmanned Aerial Vehicle (UAV)-Based Remote Sensing for Early-Stage Detection of Ganoderma. Remote Sens. 2022, 14, 1239. [Google Scholar] [CrossRef]
- Heidarian Dehkordi, R.; El Jarroudi, M.; Kouadio, L.; Meersmans, J.; Beyer, M. Monitoring Wheat Leaf Rust and Stripe Rust in Winter Wheat Using High-Resolution UAV-Based Red-Green-Blue Imagery. Remote Sens. 2020, 12, 3696. [Google Scholar] [CrossRef]
- Yang, C.; Odvody, G.N.; Fernandez, C.J.; Landivar, J.A.; Minzenmayer, R.R.; Nichols, R.L. Evaluating unsupervised and supervised image classification methods for mapping cotton root rot. Precis Agric. 2015, 16, 201–215. [Google Scholar] [CrossRef]
- Wang, T.; Thomasson, J.A.; Yang, C.; Isakeit, T.; Nichols, R.L. Automatic Classification of Cotton Root Rot Disease Based on UAV Remote Sensing. Remote Sens. 2020, 12, 1310. [Google Scholar] [CrossRef]
- Wang, T.; Thomasson, J.A.; Isakeit, T.; Yang, C.; Nichols, R.L. A Plant-by-Plant Method to Identify and Treat Cotton Root Rot Based on UAV Remote Sensing. Remote Sens. 2020, 12, 2453. [Google Scholar] [CrossRef]
- Almeida, D.R.A.D.; Broadbent, E.N.; Ferreira, M.P.; Meli, P.; Zambrano, A.M.A.; Gorgens, E.B.; Resende, A.F.; de Almeida, C.T.; Do Amaral, C.H.; Corte, A.P.D.; et al. Monitoring restored tropical forest diversity and structure through UAV-borne hyperspectral and lidar fusion. Remote Sens. Environ. 2021, 264, 112582. [Google Scholar] [CrossRef]
- Liu, W.; Ji, X.; Liu, J.; Guo, F.; Yu, Z. A Novel Unsupervised Change Detection Method with Structure Consistency and GFLICM Based on UAV Images. J. Geod. Geoinf. Sci. 2022, 5, 91–102. [Google Scholar]
- Stewart, E.L.; Wiesner-Hanks, T.; Kaczmar, N.; DeChant, C.; Wu, H.; Lipson, H.; Nelson, R.J.; Gore, M.A. Quantitative Phenotyping of Northern Leaf Blight in UAV Images Using Deep Learning. Remote Sens. 2019, 11, 2209. [Google Scholar] [CrossRef]
- Gomez Selvaraj, M.; Vergara, A.; Montenegro, F.; Alonso Ruiz, H.; Safari, N.; Raymaekers, D.; Ocimati, W.; Ntamwira, J.; Tits, L.; Omondi, A.B.; et al. Detection of banana plants and their major diseases through aerial images and machine learning methods: A case study in DR Congo and Republic of Benin. ISPRS J. Photogramm. 2020, 169, 110–124. [Google Scholar] [CrossRef]
- Xavier, T.W.F.; Souto, R.N.V.; Statella, T.; Galbieri, R.; Santos, E.S.; Suli, G.S.; Zeilhofer, P. Identification of Ramularia Leaf Blight Cotton Disease Infection Levels by Multispectral, Multiscale UAV Imagery. Drones 2019, 3, 33. [Google Scholar] [CrossRef]
- Thomasson, J.A.; Wang, T.; Wang, X.; Collett, R.; Yang, C.; Nichols, R.L. Disease detection and mitigation in a cotton crop with UAV remote sensing. Commer. Sci. Sens. Imaging 2018, 10664, 150–156. [Google Scholar]
- Yan, Z.; Hou, F.; Hou, F. Energy Balances and Greenhouse Gas Emissions of Agriculture in the Shihezi Oasis of China. Atmosphere 2020, 11, 781. [Google Scholar] [CrossRef]
- Wang, C.; Chen, Q.; Fan, H.; Yao, C.; Sun, X.; Chan, J.; Deng, J. Evaluating satellite hyperspectral (Orbita) and multispectral (Landsat 8 and Sentinel-2) imagery for identifying cotton acreage. Int. J. Remote Sens. 2021, 42, 4042–4063. [Google Scholar] [CrossRef]
- Xu, G.J.; Shen, J.; Xu, H.Y. Image segmentation of wheat scab based on lab color space. J. China Agric. Univ. 2021, 26, 149–156. [Google Scholar]
- Kahu, S.; Bhurchandi, K.M. JPEG-based Variable Block-Size Image Compression using CIE La*b* Color Space. KSII Trans. Internet Inf. Syst. (TIIS) 2018, 12, 5056–5078. [Google Scholar]
- Fern, R.R.; Foxley, E.A.; Bruno, A.; Morrison, M.L. Suitability of NDVI and OSAVI as estimators of green biomass and coverage in a semi-arid rangeland. Ecol. Indic. 2018, 94, 16–21. [Google Scholar] [CrossRef]
- Bhandari, M.; Ibrahim, A.M.H.; Xue, Q.; Jung, J.; Chang, A.; Rudd, J.C.; Maeda, M.; Rajan, N.; Neely, H.; Landivar, J. Assessing winter wheat foliage disease severity using aerial imagery acquired from small Unmanned Aerial Vehicle (UAV). Comput. Electron. Agric. 2020, 176, 105665. [Google Scholar] [CrossRef]
- Wójtowicz, A.; Piekarczyk, J.; Czernecki, B.; Ratajkiewicz, H. A random forest model for the classification of wheat and rye leaf rust symptoms based on pure spectra at leaf scale. J. Photochem. Photobiol. B Biol. 2021, 223, 112278. [Google Scholar] [CrossRef] [PubMed]
- Ebrahimi Kalan, M.; Jebai, R.; Zarafshan, E.; Bursac, Z. Distinction Between Two Statistical Terms: Multivariable and Multivariate Logistic Regression. Nicotine Tob. Res. 2021, 23, 1446–1447. [Google Scholar] [CrossRef] [PubMed]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts; NASA: Washington, DC, USA, 1973; Volume 1, pp. 309–317.
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Datt, B. A New Reflectance Index for Remote Sensing of Chlorophyll Content in Higher Plants: Tests using Eucalyptus Leaves. J. Plant Physiol. 1999, 154, 30–36. [Google Scholar] [CrossRef]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of soil-adjusted vegetation indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Spectral Reflectance Changes Associated with Autumn Senescence of Aesculus hippocastanum L. and Acer platanoides L. Leaves. Spectral Features and Relation to Chlorophyll Estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Yang, C. Assessment of the severity of bacterial leaf blight in rice using canopy hyperspectral reflectance. Precis Agric. 2010, 11, 61–81. [Google Scholar] [CrossRef]
- Zhang, S.; Li, X.; Ba, Y.; Lyu, X.; Zhang, M.; Li, M. Banana Fusarium Wilt Disease Detection by Supervised and Unsupervised Methods from UAV-Based Multispectral Imagery. Remote Sens. 2022, 14, 1231. [Google Scholar] [CrossRef]
- Dang, L.M.; Wang, H.; Li, Y.; Min, K.; Kwak, J.T.; Lee, O.N.; Park, H.; Moon, H. Fusarium Wilt of Radish Detection Using RGB and Near Infrared Images from Unmanned Aerial Vehicles. Remote Sens. 2020, 12, 2863. [Google Scholar] [CrossRef]
- Ye, H.; Huang, W.; Huang, S.; Cui, B.; Dong, Y.; Guo, A.; Ren, Y.; Jin, Y. Recognition of Banana Fusarium Wilt Based on UAV Remote Sensing. Remote Sens. 2020, 12, 938. [Google Scholar] [CrossRef]
- Torres, R.; Ferrara, G.; Soto, F.; López, J.A.; Sanchez, F.; Mazzeo, A.; Pérez-Pastor, A.; Domingo, R. Effects of soil and climate in a table grape vineyard with cover crops. Irrigation management using sensors networks. Ciência e Técnica Vitivinícola 2017, 32, 72–81. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vegetation Index | Description | Band | Formulation | Reference |
|---|---|---|---|---|
| NDVI | Normalized difference vegetation index | Red-NIR | (NIR − Red)/ (NIR + Red) | [31] |
| GNDVI | Green normailized difference vegetation index | Green-NIR | (NIR − Green)/ (NIR + Green) | [32] |
| LCI | Leaf chlorophyll index | Red-Rededge-NIR | (NIR − Rededge)/ (NIR + Red) | [33] |
| OSAVI | Optimized Soil Adjusted Vegetation Index | Red-NIR | (NIR − Red)/ (NIR + Red + 0.16) | [34] |
| NDRE | Normalized difference red edge index | Rededge-NIR | (NIR − Rededge)/ (NIR + Rededge) | [35] |
| Sample Plot # | Blight (%) | Sample Plot # | Blight (%) | Sample Plot # | Blight (%) | Sample Plot # | Blight (%) | Sample Plot # | Blight (%) |
|---|---|---|---|---|---|---|---|---|---|
| Type D1:0–5% | Type D2:5–25% | Type D3:25–50% | |||||||
| 36 | 1.9 | 38 | 5.3 | 23 | 11.0 | 12 | 16.5 | 26 | 26.4 |
| 25 | 2.3 | 16 | 6.6 | 42 | 11.2 | 29 | 17.5 | 5 | 26.6 |
| 52 | 2.5 | 40 | 7.3 | 21 | 12.0 | 13 | 17.9 | 11 | 28.8 |
| 19 | 2.6 | 47 | 7.4 | 33 | 12.2 | 27 | 19.2 | 7 | 29.0 |
| 18 | 2.6 | 41 | 7.5 | 31 | 12.7 | 9 | 19.7 | 3 | 29.7 |
| 35 | 3.6 | 51 | 7.7 | 43 | 12.9 | 1 | 19.8 | 4 | 32.3 |
| 20 | 3.9 | 49 | 7.8 | 34 | 13.7 | 14 | 19.9 | 2 | 35.3 |
| 37 | 3.9 | 44 | 8.4 | 24 | 13.8 | 6 | 20.4 | Mean: 29.7 ± 2.9 | |
| 50 | 4.2 | 22 | 9.3 | 48 | 14.1 | 15 | 22.2 | ||
| 53 | 4.3 | 17 | 9.4 | 10 | 14.4 | 28 | 22.4 | ||
| 46 | 4.5 | 30 | 10.7 | 32 | 14.8 | 8 | 24.6 | ||
| 39 | 4.8 | Mean: 13.6 ± 5.2 | |||||||
| 45 | 4.8 | ||||||||
| Mean: 3.5 ± 1.0 | |||||||||
| Band | Correlation Coeff. (r) | Significance (p) | Smaple Size |
|---|---|---|---|
| Blue | −0.274 | 0.047 | 39 |
| Green | −0.112 | 0.423 | 39 |
| Red | 0.725 | 0 | 39 |
| Rededge | −0.446 | 0.001 | 39 |
| NIR | −0.537 | 0 | 39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Chen, Y.; Xiao, Z.; Zeng, X.; Tang, S.; Lin, F.; Zhang, L.; Meng, X.; Liu, S. Cotton Blight Identification with Ground Framed Canopy Photo-Assisted Multispectral UAV Images. Agronomy 2023, 13, 1222. https://doi.org/10.3390/agronomy13051222
Wang C, Chen Y, Xiao Z, Zeng X, Tang S, Lin F, Zhang L, Meng X, Liu S. Cotton Blight Identification with Ground Framed Canopy Photo-Assisted Multispectral UAV Images. Agronomy. 2023; 13(5):1222. https://doi.org/10.3390/agronomy13051222
Chicago/Turabian StyleWang, Changwei, Yongchong Chen, Zhipei Xiao, Xianming Zeng, Shihao Tang, Fei Lin, Luxiang Zhang, Xuelian Meng, and Shaoqun Liu. 2023. "Cotton Blight Identification with Ground Framed Canopy Photo-Assisted Multispectral UAV Images" Agronomy 13, no. 5: 1222. https://doi.org/10.3390/agronomy13051222