
Weeding Effectiveness and Changes in Soil Physical Properties Using Inter-Row Hoeing and a Robot



Department of Agricultural Engineering and Safety, Faculty of Engineering, Agriculture Academy, Vytautas Magnus University, Studentu Str. 15A, Kaunas Distr., LT 53362 Akademija, Lithuania
*
Author to whom correspondence should be addressed.
Agronomy 2022, 12(7), 1514; https://doi.org/10.3390/agronomy12071514
Submission received: 22 May 2022
/
Revised: 18 June 2022
/
Accepted: 21 June 2022
/
Published: 24 June 2022
(This article belongs to the Special Issue Agricultural Automation and Innovative Agricultural Systems)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Weed control is one of the most important technological operations to ensure crop yield and quality in ecological sugar beet production. However, conventional mechanical weed control is labor- and time-intensive and has adverse effects on the soil and the environment. The aim of this study was to experimentally investigate the influence of conventional mechanical and robotic weed control systems on soil properties and to assess the effectiveness of these different weed control methods in ecological sugar beet production. This study examines two different weed control systems: robotic weed control (RWC) and conventional weed control (CWC). Field experimental studies were carried out with a solar-powered field robot and conventional inter-row cultivation (CWC1—first cultivation, CWC2—second cultivation) to determine the effectiveness of mechanical weed control in ecological sugar beet crops. The influence of different weed control systems on the physical properties of the soil in the contact zone between the soil and the tires of weed control machines was investigated. The results showed that the average weed control effectiveness inter-row was higher in the RWC (81%) compared to that in the CWC2 (46%). The overall weed control effectiveness of the robotic weed control in the sugar beet inter-row and intra-row was around 49%. The measurements showed that the weed control process reduced the soil moisture and temperature in all treatments tested. Experimental studies have confirmed that the weed control operation, although carried out with relatively lightweight robots, also has an impact on soil bulk density. RWC weed control resulted in an average increase of 0.16 g cm–3 in soil bulk density in the topsoil layer (0–10 cm) after weeding. Both CWC1 and RWC increased soil penetration resistance (PR). For CWC1, the average increase in topsoil PR after weed control was 20%, while for RWC, the increase was marginal, only around 1%. Automated precision weed control by self-propelled solar-powered field robots is an important solution to reduce the need for tedious and time-consuming manual weeding.
1. Introduction
1.1. Ecological Sugar Beet Production
Demand for ecological produce has been growing steadily recently, especially in high-income countries. Since 2012, the share of ecologically produced crops (9.5 million ha) in the total utilized agricultural area in the EU has increased by 56% to 14.7 million ha in 2020, representing 9.1% of the EU’s total agricultural area [1]. In Lithuania, the agricultural area used for ecological farming in 2020 was 8% or 235,471 ha, of which root crops accounted for 1697 ha [2].
Ecological sugar beet is much more difficult to grow than growing beet on a classical farm using chemicals. Maintaining such crops is a time-consuming and costly activity, and manual labor is still often unavoidable [3], especially for weed control in the rows. Lower yields and higher labor costs for weed control are the main reasons why ecological products usually cost more [3].
In ecological agriculture, which aims to produce ecological products without the use of synthetic fertilizers, pesticides, and growth promoters, weed control is seen as a major problem. Weeds compete with crop plants for resources such as water, light, nutrients, and space [4,5,6]. Crop yield reduction is directly related to weed competition, and yield can be reduced by more than 50% due to moisture competition alone [3]. Other authors report losses of up to 40% depending on the crop yield [7,8], and between 26 and 100% for sugar beet, which is particularly susceptible to weed competition [5,9,10,11,12,13,14]. Therefore, with the world’s growing demand for food, it is imperative to effectively manage weeds to increase the quantity and quality of agricultural products and reduce high crop losses.
1.2. Weed Control Methods and Their Effectiveness
1.2.1. Mechanical Weed Control
The majority of farms in Europe opt for traditional weed control, i.e., chemical weed control using herbicides [15], as it is cheap and efficient compared to mechanical weeding [3,16]. However, the spread of herbicide-resistant weed populations, the negative side-effects of herbicides on the environment, ground and surface water, biodiversity, human health and safety, and residues in the food chain [3], as well as the regulation of herbicides in the European Union, limit the use of herbicides [15,16,17] while at the same time increasing interest in nonchemical weed control methods in both ecological [18] and conventional farming systems [19,20]. Mechanical weed control methods are an effective alternative to chemical weed control [5,21,22,23,24]. For mechanical weed control, ecological harrows and inter-row cultivators with passive and rotating working parts are most widely used [25,26]. Mechanical weed control in the row is usually performed by methods and mechanisms such as weeding harrows, torsion weeders, rotary hoes, finger weeders, or brush weeding [27,28,29].
Mechanical weed control can also have the added benefit of stimulating the mineralization of soil-bound nitrogen, which can help improve crop yield and quality if crop nitrogen demand is higher [30]. However, this method of weed control requires greater precision than chemical weed control does. Herbicide-based weed control requires information on the species and density of weed plants, whereas mechanical weed control requires knowledge of the exact location of weeds and crop plants [16]. These reasons, therefore, encourage the use of precision technologies in physical weed control [31], which reflect environmentally friendly practices.
1.2.2. Camera-Steered Weed Control
Crop care machines can be steered to avoid damaging the main plants in the crop. Manual machines have relatively low productivity, as the driver has to guide the cultivator between the crop rows with precision to ensure accuracy, which limits the driving speed and increases the working hours. To improve mechanical weed control effectiveness, reduce crop damage, and significantly increase working speed and productivity, automated inter-row cultivation technologies with optical sensors and Real-Time Kinematic Global Positioning System (RTK-GPS) technology have been introduced [13,19,31,32,33,34,35]. The main challenge for weed control systems performing weed control in the crop row is the accurate positioning of individual plants and the identification of plants and weeds [18]. There are several research groups that have introduced the concept of intra-row weed control based on individual plant detection [18,25,36,37]. Spaeth et al. [24] compared real-time camera-based harrowing with conventional harrowing and found that crop density, weed control effectiveness, crop biomass, and grain yield were significantly higher with camera-based harrowing than with conventional harrowing. Gerhards et al. [35] showed that camera-guided hoeing resulted in 72–96% inter-row and 21–91% intra-row weed control efficacy. Weed control was 7–15% higher at 8 km h–1 compared to that at 4 km h–1. It can be explained by the fact that a higher driving speed could increase stronger burial of weeds with soil and thus may lead to higher weed suppression. Later, the same group of researchers found that camera-guided hoeing increased in-furrow weed selectivity and weed control efficacy compared to those with manual hoeing [38]. Kunz et al. [13] evaluated video camera-guided mechanical weed control in sugar beet, maize, and soybean crops and found that 78% of the weeds were controlled using this method, compared to only 65% using manual control. Higher weed control effectiveness is attributed to the fact that automatic steering by video cameras not only allows the cultivator to direct the working parts closer to the crop rows but also to increase the working speed up to 7–14 km h–1 [13,39].
1.2.3. Intra-Row Weeding Technologies
Although inter-row cultivation is a relatively effective method of weed control, weeds in the intra-row still often require manual labor [40]. Weed control in crop rows is one of the main problems in ecological farming, as it has a significant impact on crop yields [25]. The work required for row weeding is expensive, time-consuming, and difficult to organize. Therefore, due to the decreasing number of workers in agriculture and the high cost of manual labor, and at the same time the increasing demand for ecological products, more and more research is focused on the development of weed management systems to eliminate weeds in the crop rows without causing excessive damage to the crop [13,16,23,28,36,40,41,42,43,44,45,46,47,48]. Knowing that the sugar beet is particularly susceptible to weed competition, weed control is a necessary measure between and within crop rows [31]. Effective weed control can significantly increase the quantity and quality of sugar beet yields [9,49]. Such crop care machines are characterized by precise control of the tool position and are based on digital technologies such as video cameras, sensors, RTK-GPS, and machine learning. Up to 92% of weed control effectiveness can be achieved when performing intra-row weed control [35,48]. Rasmussen et al. [42] found that for advanced weed control in ecological sugar beet rows, cutting implements are preferable to rotating tines because of better control of soil movement. However, the 70% weed control effectiveness achieved required a 20% loss of sugar beet. Other researchers have reported that combined weed control inter-row and intra-row allows for achieving weed control efficiencies of 63–92% and reduces hand weeding to 24% [29].
1.2.4. Robotic Weed Control
Automated precision weed control with self-propelled robots is a rapidly developing research area in agricultural robotics [16,44,49,50,51,52,53,54,55]. However, due to the limited results of scientific-practical research in real sugar beet fields, such robotic weed control systems are not yet widely used in sugar beet crops in current practice. The declining number of people working in agriculture, the growing demand for organic sugar, and the publication of new positive research results using robotic weed control systems will inevitably allow more and more robots to be seen in the fields in the near future.
With the development of agricultural mechanization and digital technologies, automated weeding robots, which can improve weeding effectiveness, yield, and quality of agricultural products, save resources and reduce environmental pollution, may gradually complement or replace traditional weeding methods. Robotic systems with high precision can control weeds both intra-rows and inter-rows. Astrand and Baerveldt [16] investigated the effectiveness of a mobile robot for mechanical weed control in ecologically grown sugar beet crops. The robot, equipped with a gray-scale camera with a near-infrared filter, allowed the separation of sugar beet from weeds and the control of weeds in the crop rows. Pérez-Ruiz et al. [43] developed a real-time intelligent robotic weed control system that can be used for weed control under field conditions. Norremark et al. [36] used an automated tillage system for weed control in intra-rows and inter-rows of crops based on kinematic GPS navigation and real-time control. Lottes et al. [56] addressed the problem of detecting sugar beet plants and weeds using a camera mounted on a field mobile robot. The system proposed by the researchers allowed accurate identification of weeds in the field. Rasmussen et al. [42] presented a combination of camera-guided inter-row hoeing with sensor-based selective intra-row weed control. Melander et al. [28] proposed an intelligent mechanical weed control that manages 50–90% of weeds in the rows. Langsenkamp et al. [27] achieved 93.86% weed control effectiveness with tube stamp mechanical weed control. Robotic weeding systems capable of selectively controlling individual weeds in rows are able to replace manual weeding and thus increase the effectiveness of the weed control process [44].
Merfield [57] argues that many of the current machines on the market are not really weeding robots. These machines are essentially self-propelled vehicles carrying targeted weeding tools. According to him, a true weeding robot should be able to do more, i.e., observe the crop, the weeds, and the environment; decide when to weed the crop; select the optimal weeding device and operate it, and tidy up the field if necessary; transport the device to/from the field; and finally, the robot should be able to carry out all the tasks of weed management that are currently carried out by humans.
Although crop care robots are still being developed and refined and are used in small areas rather than on a large scale [3], robotic weeding machines are already available on the market: AVO (Ecorobotix SA, Yverdon-les-Bains, Switzerland), Dino, and Oz (Naïo Technologies, Escalquens, France), Robotti (Agrointelli, Aarhus N, Denmark), FD20 (FarmDroid, Vejen, Denmark), La Chèvre (Nexus Robotics Inc., Brossard, QC, Canada), Robot One (Pixelfarming Robotics, Almkerk, The Netherlands), TREKTOR (SITIA, Bouguenais, France), Weed Whacker robot (Odd. Bot, Hague, The Netherlands), and others.
1.3. Correlation with Soil Properties
Technological crop production operations significantly change the soil properties that determine the conditions for plant growth and development, and ultimately the yield. In order to ensure good growing conditions for plants, the soil must provide sufficient air, water, and nutrients for the roots. The bulk density and penetration resistance of soil is among the most important physical properties that influence soil and plant yield factors. Changes in soil bulk density lead to changes in water, air, and heat regimes, biological activity, root distribution, and plant mass [58]. When soil is mechanically disturbed, the water/air ratio, soil temperature regime, and chemical and biological factors change. Consequently, the process of weed control also affects the physical properties of the soil.
Lal [59] points out that soil structure is an important soil property that influences three degradation processes: physical (decomposition of soil structure leading to crusting, compaction, erosion, desertification, anaerobiosis, environmental pollution, and unsustainable use of natural resources), chemical, and biological. According to Araujo-Junior et al. [60], weed management has an impact on carbon stocks and can be useful to reduce the physical degradation of soils due to compaction and hydroerosion. The same authors indicate that weed control methods have a significant impact on soil physical properties, mainly in the surface layer (0–10 cm) [60,61].
Soil bulk density is a major factor in soil compaction. Intensive outdoor use of heavy agricultural machinery and equipment can increase bulk density and reduce water and air transport in the soil, especially when driving under high soil moisture. As a result, the nutrient content of the soil decreases, which in turn leads to a decrease in yield [62]. Therefore, other authors recommend that preventive measures to avoid soil compaction should be concentrated in the layer to a depth of 0.3 m [63].
Although mechanized weed control methods can have a significant effect on various soil properties, this effect on soil has been studied little. In addition, there is a very limited number of research papers in the scientific literature on the evaluation of the effectiveness of robotic weed control systems in sugar beet crops. The aim of this study was to experimentally investigate the influence of traditional mechanical and robotic weed control systems on soil properties and to assess the effectiveness of these different weed control methods in growing sugar beet ecologically in Lithuanian conditions. The short-term effects of weed control machine processes on soil PR, bulk density, moisture content, temperature, and electrical conductivity were analyzed to assess changes in soil condition.
2. Materials and Methods
2.1. Experimental Site
The field experiments were carried out between April and July 2021 in Panevėžys district, central Lithuania, in two separate fields (55°49′19.4″ N, 23°55′13.0″ E, and 55°43′46.6″ N, 24°06′18.1″ E) with similar soil characteristics (sandy loam with pH 7.2). Winter wheat was the previous crop in both fields. This is a temperate region (average annual air temperature 6.5–7.0 °C, total annual precipitation 560–700 mm). In 2021, the average air temperature during the study period was 14.8 °C (6.5 °C in April, 11.1 °C in May, 19.5 °C in June, 22.2 °C in July), and the average precipitation was 57 mm (9 mm in April, 120 mm in May, 40 mm in June, and 58 mm in July).
2.2. Experimental Design and Treatments
Two mechanical weed control systems were applied in ecological sugar beet crops: conventional and robotic. The sugar beet (variety Marley) was sown on 20–25 April 2021. For the conventional technology, the ecological sugar beet was sown with a Kverneland Monopill drill at a depth of 2.5 cm, with row spacing of 0.9 m and an average spacing between the seeds in a row of 0.16 m. The sowing density was about 70,000 seeds ha–1. In the robotic technology, sowing and weed control of sugar beet was carried out by an FD20 robot (FarmDroid, Vejen, Denmark). The robot sowed the sugar beet with a row spacing of 0.45 m and a spacing between the seeds in a row of 0.18 m. The sowing density was about 123,000 seeds ha–1. The FD20 robot used a GPS system for sowing to determine the exact location of each seed. Therefore, after sowing, by knowing exactly where the seeds were placed, the robot was able to carry out weed control in the crop spacing and in the row around the plants before the sugar beet germinated. This robot does not rely on cameras or sensors to identify plants and weeds. Powered by electricity, with solar panels and batteries, the robot recharges itself during the day while working in the field, and this energy is fully sufficient for overnight work. No external charging is required.
Experimental studies on soil properties and weed control effectiveness were carried out on three occasions: 25 May 2021 (CWC1) and 4 June 2021 (CWC2) with the conventional weed control system, and 1 July 2021 (RWC) with the FD20 robot. The trials with the robotic weed control system were carried out later than with the conventional system because in the first test field, the robot sowed the sugar beet properly, but due to excessive soil moisture, the robot could not carry out weed control properly. Therefore, re-sowing of the sugar beet with the robot was carried out in a more suitable field on 8 June 2021.
Conventional mechanical weed control was carried out with a John Deere 6175M tractor and a KHR 1.2 × 4.5 inter-row cultivator (Maschinenfabrik Schmotzer GmbH, Bad Windsheim, Germany), manually driven, with a working width of 5.4 m and weight of 2.1 t (total with a tractor about 9.5 t). The speed of the drive depended on the weediness of the field, the soil condition, and the ambient environmental conditions, and was 1.5 km h–1 for CWC1 and for 3.8 km h–1 CWC2. The robot (RWC) had a traveling speed of about 0.74 km h–1, a working width of 2.7 m, and weight of about 0.9 t. While the conventional weed control system only controlled weeds in the inter-row, the robot also controlled weeds in the intra-row between the plants. The operating parameters of the robot for the intra-row operation were as follows: the distance between the weeding knife and the sugar beet was 60 mm, and the knife entered the row of plants at 85%. The working depth of the robotic weed control technological operation was about 2 cm, compared to the working depth of about 3 cm for the conventional system. The machines used for weed control are presented in Figure 1.
2.3. The Effects of Machinery on Soil Physical Properties
Comparative experimental studies were carried out to determine the effects of mechanized weed control systems on the soil. Soil properties such as PR, moisture content, temperature, and electrical conductivity were investigated before weeding (control) and after mechanized weed control (after weeding). These measurements were carried out in the middle of the row, which was subjected to the wheels of a tractor or robot. In this soil-machine tire contact zone, the surveys were carried out in 5 different randomly selected field locations, with 5 replicates at each location (Figure 2).
An electronic penetrometer Eijkelkamp Penetrologer was used to determine the soil PR (MPa). Soil moisture (%), temperature (°C), and electrical conductivity (mS·m−1) were measured with a Delta-T (HH2) handheld electronic sensor and data logger with a W.E.T Sensor type WET-1 probe.
Soil bulk density was determined by weighing soil samples with a Nekrasov drill [64] in two different soil layers: 0–10 and 10–20 cm. The soil samples were weighed, dried in an oven at 105 °C for 24 h, and weighed again to calculate dry bulk density. Soil bulk density (g cm−3) was calculated using the following formula [65]:
where m2—mass of the dry soil (g); V—volume of the dry soil (cm3).
2.4. Effectiveness of Different Weed Control Systems
To assess the effectiveness of different mechanized weed control systems, the number of weeds per 0.25 m2 area was recorded using a 0.5 m × 0.5 m frame. Weeds falling inside the square frame were counted intra-row and inter-row separately before the weed control operation (control) and after the passage of the cultivator or robot. The trials were carried out in 8 different randomly selected field locations (Figure 2).
The effectiveness (E) of the different weed control systems was compared with the control, i.e., the number of weeds before the technological operation [48]:
where Nb—the number of weeds in the control before the weed control operation; Na—the number of weeds after the weed control operation.
E (%) = (Nb − Na)/Nb × 100,
2.5. Statistical Analysis
The data from the studies were statistically processed using the Tukey’s HSD test [66]. Significant differences in soil properties and weed control effectiveness between the different sugar beet cultivation technologies and weed control methods tested were determined by calculating the least significant difference at the 95% confidence level (p < 0.05). Different letters (a, b, c, and other) in the figures indicate statistically significant differences.
3. Results
3.1. Soil Penetration Resistance
The experimental results showed that in the conventional system, the weed control process (CWC1) increased soil PR in the top layer of the soil (0–10 cm) (Figure 3). It was found that in this layer, the average soil PR increased by 20% from 0.32 to 0.4 MPa after the weed control process. This increase in soil penetration resistance can be related to the weight of the tractor and the inter-row cultivator [67,68]. In the 11–20 cm depth, it increased by 6% to 1.7 MPa after weeding. An increase in soil PR is accompanied by an increase in bulk density, a decrease in soil porosity, and a decrease in the supply of moisture and nutrients to the plant, which inhibits the development of the plant root system [69]. The weed control process at a depth of 21–30 cm did not affect the PR and the average soil PR here was 3.4 MPa.
In the RWC system, the influence of the weed control technological process on soil PR was negligible, only about 1% in all soil layers. When applying RWC, the average soil PR in the topsoil after the weed control process was 1.09 MPa. The highest soil PR at the working depth of the weed control machine (2–3 cm) was about 0.9 MPa for RWC and about 0.3 MPa for CWC1.
No other research on the investigation of the changes in soil PR after the weed control process could be found, so comparisons were made with tillage in the topsoil. Gürsoy et al. [70], evaluating tillage practices, found that soil PR was lowest (1.62 MPa) with conventional tillage at 0–10 cm depth, while there was no difference between 10–20 and 20–30 cm depth. Koch et al. [63], using shallow-mixing conservation tillage to a depth of 10 cm, found an increase in soil PR of about 1.5 MPa at 10–15 cm depth and no change at 25–27 cm depth. These results correlate with our results, as the differences were only found in the topsoil. Other researchers who have studied minimum tillage, consisting of only rotary hoeing to 10 cm depth in silty-clay soils have obtained results similar to ours: PR was 0.66 MPa at 3.5–14 cm depth and 1.93 MPa at 14–28 cm depth [71].
3.2. Soil Moisture, Temperature, Electrical Conductivity, and Bulk Density
The effect of different weed control methods on soil moisture, temperature, and electrical conductivity is presented in Figure 4. The measurements (0–5 cm depth) showed that the weed control technology reduced soil moisture by 21% (from 18.48 to 15.26%) for CWC1; by 1.4% (from 21.22 to 20.92%) for CWC2; and by 3.4% (from 22.79 to 22.04%) for RWC. The high decrease in soil moisture after weeding is not positive, especially when the moisture is below the optimal soil moisture (18–22%). Insufficient soil moisture can complicate the nutrient supply of plants and the growing conditions of sugar beet. However, the electrical conductivity of the soil was slightly increased by the weed control process: by 6.7% for CWC1 (from 101.88 to 108.68 mS·m−1), by 2.0% for CWC2 (from 114.48 to 116.80 mS·m−1), and by 3.0% for RWC (from 154.40 to 159.00 mS·m−1). No significant differences were found between the conventional and the robotic systems in terms of the effect of weed control on soil moisture content and electrical conductivity. Changes in soil moisture can be attributed to variations in temperature and precipitation during the experimental period.
Soil temperature decreased on average by 0.8 °C for CWC1 and 0.6 °C for CWC2 and RWC after the weed control process. The average soil temperature in CWC1 before weed control was 15.54°C and in RWC1 after weed control it was 14.76 °C. For CWC2, the average values were 24.76 and 24.13°C, respectively, and for RWC—28.20 and 27.57 °C. Significant differences were found between CWC1 and RWC. This was mainly due to the ambient air temperature, which was about 3 °C lower than the average soil temperature.
The conventional weed control (CWC2) had no effect on the soil bulk density in the topsoil layer (0–10 cm), which was about 1.6 g cm–3 (Figure 5). In the deeper layer (10–20 cm), the soil bulk density was slightly reduced by 2.4%, from 1.68 to 1.64 g cm–3 on average. There were no significant differences. Robotic weed control (RWC) significantly increased soil bulk density after weed control in the topsoil layer (0–10 cm)—by 10.4%, from 1.38 to 1.54 g cm–3. In the deeper layer (10–20 cm), weed control had no effect on soil bulk density, which averaged 1.4 g cm–3. The main reason for the differences in soil bulk density is climatic conditions, and the decrease in density after weed control is attributed to the effect of the working parts of the aggregates on the soil. Gürsoy et al. [70] found that tillage had no significant effect on soil bulk density at 0–10 and 20–30 cm depth, while the lowest bulk density (1.19 g cm–3) was obtained at 10–20 cm depth. Newton et al. [72] used minimum tillage and found that soil bulk density varied between 1.25 and 1.30 g cm–3 depending on the year. Arvidsson [73] evaluated chiseling used for soil loosening in silty clay loam soil and obtained soil bulk densities of 1.13 to 1.21 g cm–3 in the 0–10 cm layer and about 1.28 g cm–3 in the 10–25 cm layer. For shallow-mixing conservation tillage, the dry bulk density in the top layer (0–0.3 m) was 1.4 Mg m–3 [63].
3.3. Effectiveness of Weed Control Systems
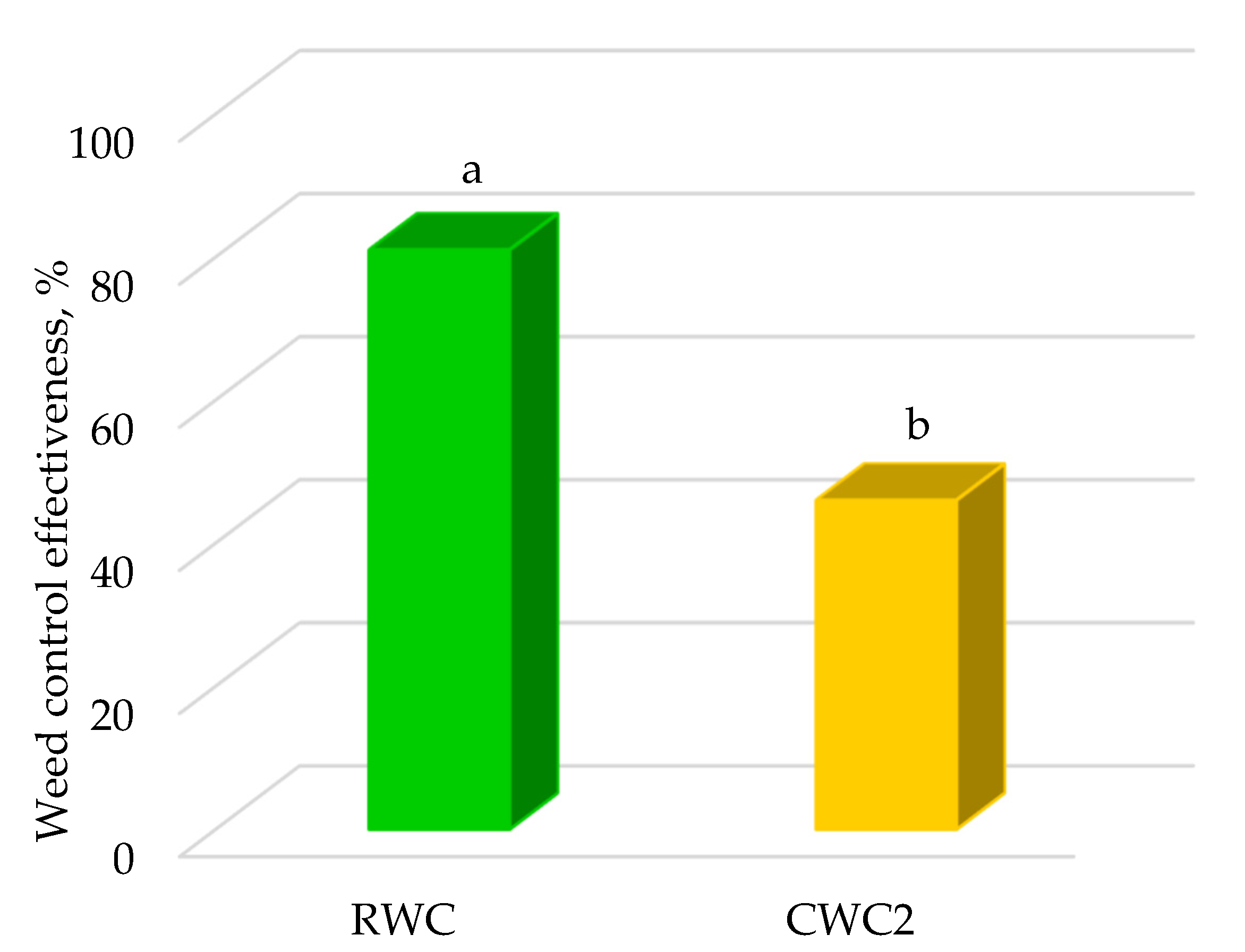
The weed control process by the robot (RWC) showed an average weed control effectiveness of 49% in sugar beet rows and inter-rows. The effectiveness of intra-row weed control ranged from 14 to 60% and averaged around 38% (RWC). In contrast, weed control in the inter-rows was about 81% (RWC), and 46% for conventional weed control (CWC2) (Figure 6). The effectiveness of the weed control process for weed control in-row spacing was substantial between conventional and robotic technologies. The overall weed control effectiveness of conventional and robotic systems was similar. However, in the conventional system, only the sugar beet inter-rows are loosened, while weeds remain in the crop row to be removed manually by a human operator. Although the robot performs weed control both inter-row and intra-row, we assumed that the overall weed control effectiveness was below 50%. We can indicate the main reasons for such a result. First, the robot did not kill weeds close to the sugar beet, as the cutting blade passes 60 mm around the sugar beet plants. Second, the robot left weeds where the sugar beet should have been but did not sprout or for other reasons did not start growing. Third, the soil surface was sufficiently hard that the robot’s working parts may not have cut the weeds as they moved across the soil surface. Weeds tangled around the blades or abrasion of the blades could also be the reasons.
The BoniRob robotic weed control platform from Bosch Deepfield Robotics, which performs mechanical weed control with a tube-stamp, has a weed control effectiveness of up to 94%, but due to the specific soil conditions required and the slow working process, it is not seen as a viable way to control weeds [27]. Kunz et al. [21] conducted field experiments on sugar beet and soybean and found that video-camera-guided mechanical weed control killed 82% of weeds. Tillett et al. [40] showed that weediness between the rows was reduced by up to 87%. Lati et al. [74] compared the performance of the Robovator with a standard cultivator and found that the robotic intra-row cultivator reduced manual weeding hours by up to 45% and removed 18–41% more weeds per row. In other authors’ studies on the sugar beet, after two intra-row weed control treatments, the effectiveness ranged from 30 to 88% [75]. The real-time automatic harrow system proposed by Rueda-Ayala et al. [76] achieved an average weed control effectiveness of 51% (20–91%). In contrast, camera-based harrowing, even at the lowest conventional intensity, achieved an average weed control effectiveness of 61% [24]. Naruhn et al. [20] found that the combination of harrowing and hoeing (COMB) in soybean was the best and achieved the highest (78.5%) weed control effectiveness, while hoeing (HOE) (39.7%) was the worst. Split-hoeing and finger-weeding was the best mechanical weed control method in both soybean and faba bean, with weed control effectiveness values ranging from 73 to 97% [77]. Further studies showed that combined intra-row and inter-row weed control methods, such as hoeing-ridging or split-hoeing + finger-weeding, resulted in weed control efficiencies ranging from 63 to 92% in onion seed production [29]. Gerhards et al. [31] carried out trials on maize, soybean, and sugar beet to investigate the benefits of intra-row finger weeding, torsion weeding, rotary harrowing, and ridging in combination with camera-guided inter-row hoeing. The results showed that mechanical inter-row weed control effectiveness ranged from 90 to 95%, while intra-row weed control was below 90% and averaged 67%. In the sugar beet crop, all the mechanical weed control methods applied resulted in a row-to-row weed control effectiveness of approximately 80%.
In summary, the effectiveness of mechanical weed control is highly variable, and its success depends on a number of factors: crop type and variety, weed species and stage of development, soil and weather conditions (soil type, moisture, temperature, surface texture, air temperature after mechanical weed control treatment, and others), the choice of the weed control technique, the speed of the vehicle, etc. Different field and weather conditions have been identified by other authors as the main reasons influencing the effectiveness of weed control [19,20,78]. There is probably no single best approach to weed control, and a successful and sustainable weed control system can be one that uses a complex combination of different technical designs. Therefore, scientific questions related to the optimization of weed control processes are of great importance for further research, with a particular focus on weed control in the row close to the plants, taking into consideration different environmental conditions.
4. Conclusions
In this research, experimental field studies were carried out on ecological sugar beet crops to determine the influence of weed control systems on the physical properties of the soil in the soil–tire contact zone. An evaluation of the effectiveness of mechanical weed control systems, using conventional and robotic methods, in controlling inter-row and intra-row weeds was also carried out. In the conventional weed control system, the process of weed control in the top layer of the soil (0–10 cm depth) increased the soil penetration resistance by 20%, while weed control with the robot had almost no effect on soil penetration resistance. The results of the experimental studies confirmed that the weed control technological operation, although carried out with relatively lightweight robots, had a significant influence on soil physical properties such as soil temperature and bulk density. The robotic weed control system resulted in an average increase in soil bulk density of 0.16 g cm−3 in the upper soil layer (0–10 cm), while the deeper layer (10–20 cm) was not affected. The results showed that the average weed control effectiveness (49%) was higher for weed control in the sugar beet inter-row and intra-row with the robot (RWC) than for conventional weeding (46%). Wet weather conditions and the fact that the robot did not kill weeds right next to the sugar beet may have been the main reasons for the relatively low effectiveness of weed control. Looking to the future, it can be seen that high precision and low mass autonomous field robots can reduce or even replace manual weeding as well as conventional row spacing and are a promising tool for weed control on ecological farms. In addition, robotic systems can reduce the impact of machinery used for weed control on the soil and the environment. However, this area of research still requires more extensive and in-depth research to compare different designs of conventional and robotic weed control systems with each other, to assess the impact of different environmental conditions on the performance of weed control machines within the row and between the rows, and to assess the economic benefits and impacts of robotic systems on different soils and the environment.
Author Contributions
Conceptualization, I.B. and E.Š.; methodology, I.B. and E.Š.; validation, I.B. and E.Š.; formal analysis, I.B.; investigation, I.B. and S.B.; resources, I.B. and E.Š.; data curation, I.B. and S.B.; writing—original draft preparation, I.B., E.Š. and S.B.; writing—review and editing, E.Š.; visualization, I.B.; supervision, E.Š. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Conflicts of Interest
The authors declare no conflict of interests.
References
- Eurostat. 2020. Available online: https://ec.europa.eu/eurostat/statistics-explained/index.php?title=Organic_farming_statistics#Total_organic_area (accessed on 23 April 2022).
- Eurostat. 2020. Available online: https://ec.europa.eu/eurostat/data/database?node_code=org (accessed on 24 April 2022).
- Abouziena, H.F.; Haggag, W.M. Weed control in clean agriculture: A review. Planta Daninha 2016, 34, 377–392. [Google Scholar] [CrossRef]
- Mesbah, A.; Miller, S.D.; Fornstrom, K.J.; Legg, D.E. Sugar Beet-Weed Interactions; Agricultural Experiment Station, B-998; University of Wyoming: Laramie, WY, USA, 1994. [Google Scholar]
- Cioni, F.; Maines, G. Weed control in sugarbeet. Sugar Tech. 2010, 12, 243–255. [Google Scholar] [CrossRef]
- Guglielmini, A.C.; Verdú, A.M.C.; Satorre, E.H. Competitive ability of five common weed species in competition with soybean. Int. J. Pest Manag. 2017, 63, 30–36. [Google Scholar] [CrossRef]
- Oerke, E.C. Crop losses to pests. J. Agric. Sci. 2006, 144, 31–43. [Google Scholar] [CrossRef]
- Pimentel, D. Pest control in world agriculture. Agric. Sci. 2009, 2, 272–293. [Google Scholar]
- Jalali, A.H.; Salehi, F. Sugar beet yield as affected by seed priming and weed control. Arch. Agron. Soil. Sci. 2013, 59, 281–288. [Google Scholar] [CrossRef]
- Majidi, M.; Heidari, G.; Emam, Y. Qualitative characteristics of sugar beet as affected by different broadleaf herbicides combinations. Iran Agric. Res. 2017, 36, 1–6. [Google Scholar]
- Gerhards, R.; Bezhin, K.; Santel, H.J. Sugar beet yield loss predicted by relative weed cover, weed biomass and weed density. Plant Prot. Sci. 2017, 53, 118–125. [Google Scholar]
- Jursik, M.; Holec, J.; Soukup, J.; Venclova, V. Competitive relationships between sugar beet and weeds in dependence on time of weed control. Plant Soil Environ. 2018, 5, 108–116. [Google Scholar] [CrossRef] [Green Version]
- Kunz, C.; Weber, J.F.; Peteinatos, G.G.; Sokefeld, M.; Gerhards, R. Camera steered mechanical weed control in sugar beet, maize and soybean. Precis. Agric. 2018, 19, 708–720. [Google Scholar] [CrossRef]
- Bhadra, T.; Mahapatra, C.K.; Paul, S.K. Weed management in sugar beet: A review. Fundam. Appl. Agric. 2020, 5, 147–156. [Google Scholar] [CrossRef]
- Dyrmann, M.; Karstoft, H.; Midtiby, H.S. Plant species classification using deep convolutional neural network. Biosyst. Eng. 2016, 151, 72–80. [Google Scholar] [CrossRef]
- Astrand, B.; Baerveldt, A.J. An agricultural mobile robot with vision-based perception for mechanical weed control. Auton. Robot. 2002, 13, 21–35. [Google Scholar] [CrossRef]
- Loddo, D.; McElroy, J.S.; Giannini, V. Problems and perspectives in weed management. Ital. J. Agron. 2021, 16, 1854. [Google Scholar] [CrossRef]
- Gobor, Z. Mechatronic system for mechanical weed control of the intra-row area in row crops. KI Kunstl. Intell. 2013, 27, 379–383. [Google Scholar] [CrossRef]
- Spaeth, M.; Machleb, J.; Peteinatos, G.G.; Saile, M.; Gerhards, R. Smart Harrowing—Adjusting the Treatment Intensity Based on Machine Vision to Achieve a Uniform Weed Control Selectivity under Heterogeneous Field Conditions. Agronomy 2020, 10, 1925. [Google Scholar] [CrossRef]
- Naruhn, G.P.; Peteinatos, G.G.; Butz, A.F.; Möller, K.; Gerhards, R. Efficacy of Various Mechanical Weeding Methods—Single and in Combination—In Terms of Different Field Conditions and Weed Densities. Agronomy 2021, 11, 2084. [Google Scholar] [CrossRef]
- Kunz, C.; Weber, J.F.; Gerhards, R. Comparison of different mechanical weed control strategies in sugar beets. In Proceedings of the Conference 27th Deutsche Arbeitsbesprechung über Fragen der Unkrautbiologie und -Bekämpfung, Braunschweig, Germany, 23–25 February 2016. [Google Scholar]
- Peruzzi, A.; Martelloni, L.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Raffaelli, M. Machines for non-chemical intra-row weed control in narrow and wide-row crops: A review. J. Agric. Eng. 2017, 48, 57–70. [Google Scholar] [CrossRef] [Green Version]
- Cook, S.K.; Davies, L.R.; Pickering, F.; Tatnell, L.V.; Huckle, A.; Newman, S.; Whiteside, C.; White, C.; Talbot, D.; Holmes, H.; et al. Weed Control Options and Future Opportunities for UK Crops; Research Review No. CP 182/1807258; Agriculture and Horticulture Development Board: Kenilworth, UK, 2019. [Google Scholar]
- Spaeth, M.; Schumacher, M.; Gerhards, R. Comparing Sensor-Based Adjustment of Weed Harrowing Intensity with Conventional Harrowing under Heterogeneous Field Conditions. Agronomy 2021, 11, 1605. [Google Scholar] [CrossRef]
- Van der Weide, R.; Bleeker, P.; Achten, V.T.; Plotz, L.; Fogelberg, F.; Melander, B. Innovation in mechanical weed control in crop rows. Weed Res. 2008, 48, 215–224. [Google Scholar] [CrossRef]
- Šarauskis, E. Mechaninę Pasėlių Priežiūrą Lengvina Automatinės Valdymo Sistemos; Mano Ūkis; Lietuvos Žemės Ūkio Konsultavimo Tarnyba; Akademija (Kėdainių r.): Kaunas, Lithuania, 2019; Volume 8, p. 2019. [Google Scholar]
- Langsenkamp, F.; Sellmann, F.; Kohlbrecher, M.; Kielhorn, A.; Strothmann, W.; Michaels, A.; Trautz, D. Tube Stamp for mechanical intra-row individual Plant Weed Control. In Proceedings of the 18th World Congress of CIGR, Beijing, China, 16–19 September 2014; pp. 16–19. [Google Scholar]
- Melander, B.; Lattanzi, B.; Pannacci, E. Intelligent versus non-intelligent mechanical intra-row weed control in transplanted onion and cabbage. Crop Prot. 2015, 72, 1–8. [Google Scholar] [CrossRef]
- Pannacci, E.; Farneselli, M.; Guiducci, M.; Tei, F. Mechanical weed control in onion seed production. Crop Prot. 2020, 135, 105221. [Google Scholar] [CrossRef]
- Davies, D.H.K.; Welsh, J.P. Weed control in organic cereals and pulses. In Organic Cereals and Pulses: Papers presented at Conferences Held at the Heriot-Watt University, Edinburgh, and at Cranfield University Silsoe Campus, Bedfordshire, 6 and 9 November 2001; Chalcombe Publications: Bedfordshire, UK, 2002; pp. 77–114. [Google Scholar]
- Gerhards, R.; Weber, J.F.; Kunz, C. Evaluation of weed control efficacy and yield response of inter-row and intra-row hoeing technologies in maize, sugar beet and soybean. Landtechnik 2020, 75, 247–260. [Google Scholar]
- Tillett, N.D.; Hague, T.; Miles, S.J. Inter-row vision guidance for mechanical weed control in sugar beet. Comput. Electron. Agric. 2002, 33, 163–177. [Google Scholar] [CrossRef]
- Griepentrog, H.W.; Noerremark, M.; Nielsen, J.; Ibarra, J.S. Autonomous inter-row hoeing using GPS-based side-shift control. In Proceedings of the Automation Technology for Off-Road, Bonn, Germany, 1–2 September 2006; pp. 117–124. [Google Scholar]
- Kunz, C.; Weber, J.F.; Gerhards, R. Benefits of Precision Farming Technologies for Mechanical Weed Control in Soybean and Sugar Beet—Comparison of Precision Hoeing with Conventional Mechanical Weed Control. Agronomy 2015, 5, 130–142. [Google Scholar] [CrossRef] [Green Version]
- Gerhards, R.; Kollenda, B.; Machleb, J.; Möller, K.; Butz, A.; Reiser, D.; Griegentrog, H.W. Camera-guided weed hoeing in winter cereals with narrow row distance. Gesunde Pflanz. 2020, 72, 403–411. [Google Scholar] [CrossRef]
- Nørremark, M.; Griepentrog, H.W.; Nielsen, J.; Søgaard, H.T. Evaluation of an autonomous GPS-based system for intra-row weed control by assessing the tilled area. Precis. Agric. 2012, 13, 149–162. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, J.; Huang, X.; Li, N.; Chen, Z.; Li, W. System integration design of intra-row weeding robot. In Proceedings of the American Society of Agricultural and Biological Engineers, St. Joseph, MI, USA, 21–24 July 2013; p. 1. [Google Scholar]
- Gerhards, R.; Andújar Sanchez, D.; Hamouz, P.; Peteinatos, G.G.; Christensen, S.; Fernandez-Quintanilla, C. Advances in site-specific weed management in agriculture—A review. Weed Res. 2022, 62, 123–133. [Google Scholar] [CrossRef]
- Wiltshire, J.J.J.; Tillett, N.D.; Hague, T. Agronomic evaluation of precise mechanical hoeing and chemical weed control in sugar beet. Weed Res. 2003, 43, 236–244. [Google Scholar] [CrossRef]
- Tillett, N.D.; Hague, T.; Grundy, A.C.; Dedousis, A.P. Mechanical within-row weed control for transplanted crops using computer vision. Biosyst. Eng. 2008, 99, 171–178. [Google Scholar] [CrossRef]
- Norremark, M.; Sorenson, C.G.; Jorgenson, R.N. HortiBot: Comparison of present and future phytotechnologies for weed control—Part III. In Proceedings of the 2006 ASAE Annual Meeting. American Society of Agricultural and Biological Engineers, St. Joseph, MI, USA; 2006; p. 1. [Google Scholar]
- Rasmussen, J.; Griepentrog, H.W.; Nielsen, J.; Henriksen, C.B. Automated intelligent rotor tine cultivation and punch planting to improve the selectivity of mechanical intra-row weed control. Weed Res. 2012, 52, 327–337. [Google Scholar] [CrossRef]
- Perez-Ruiz, M.; Slaughter, D.C.; Gliever, C.; Upadhyaya, S.K. Tractor-based Real-time Kinematic-Global Positioning System (RTK-GPS) guidance system for geospatial mapping of row crop transplant. Biosyst. Eng. 2012, 111, 64–71. [Google Scholar] [CrossRef]
- Perez-Ruiz, M.; Slaughter, D.C.; Fathallah, F.A.; Gliever, C.J.; Miller, B.J. Co-robotic intra-row weed control system. Biosyst. Eng. 2014, 126, 45–55. [Google Scholar] [CrossRef]
- Pannacci, E.; Tei, F. Effects of mechanical and chemical methods on weed control, weed seed rain and crop yield in maize, sunflower and soyabean. Crop Prot. 2014, 64, 51–59. [Google Scholar] [CrossRef]
- Heno, S.; Viou, L.; Khan, M.F.R. Sugar beet production in France. Sugar Tech. 2018, 20, 392–395. [Google Scholar] [CrossRef]
- Machleb, J.; Peteinatos, G.G.; Kollenda, B.L.; Andújar, D.; Gerhards, R. Sensor-based mechanical weed control: Present state and prospects. Comput. Electron. Agric. 2020, 176, 105638. [Google Scholar] [CrossRef]
- Chandel, N.S.; Chandel, A.K.; Roul, A.K.; Solanke, K.R.; Mehta, C.R. An integrated inter-and intra-row weeding system for row crops. Crop Prot. 2021, 145, 105642. [Google Scholar] [CrossRef]
- Sabanci, K.; Aydin, C. Smart robotic weed control system for sugar beet. J. Agric. Sci. Technol. 2017, 19, 73–83. [Google Scholar]
- Bawden, O.; Ball, D.; Kulk, J.; Perez, T.; Russell, R. A lightweight, modular robotic vehicle for the sustainable intensification of agriculture. In Proceedings of the 16th Australasian Conference on Robotics and Automation 2014, Melbourne, Australia, 2–4 December 2014; Australian Robotics and Automation Association Inc.: Brisbane, Australia, 2014; pp. 1–9. [Google Scholar]
- Bawden, O.; Kulk, J.; Russell, R.; McCool, C.; English, A.; Dayoub, F.; Perez, T. Robot for weed species plant-specific management. J. Field Robot. 2017, 34, 1179–1199. [Google Scholar] [CrossRef]
- Jensen, K.; Larsen, M.; Nielsen, S.H.; Larsen, L.B.; Olsen, K.S.; Jorgensen, R.N. Towards an Open Software Platform for Field Robots in Precision Agriculture. Robotics 2014, 3, 207–234. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.H.; Han, S.K.; Han, S.H.; Park, K.; Kim, K.; Kim, S. Morphology-based guidance line extraction for an autonomous weeding robot in paddy fields. Comput. Electron. Agric. 2015, 113, 266–274. [Google Scholar] [CrossRef]
- Grimstad, L.; Johan, P. The thorvald II agricultural robotic system. Robotics 2017, 6, 24. [Google Scholar] [CrossRef] [Green Version]
- Utstumo, T.; Urdal, F.; Brevik, A.; Dorum, J.; Netland, J.; Overskeid, O.; Berge, T.W.; Gravdahl, J.T. Robotic in-row weed control in vegetables. Comput. Electron. Agric. 2018, 154, 36–45. [Google Scholar] [CrossRef]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE international conference on robotics and automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3024–3031. [Google Scholar]
- Merfield, C.N. Robotic weeding’s false dawn? Ten requirements for fully autonomous mechanical weed management. Weed Res. 2016, 56, 340–344. [Google Scholar] [CrossRef]
- Bogužas, V.; Arvasas, J.; Šniauka, P. Žemdirbystė; Aleksandras Stulginskis University: Akademija, Lithuania, 2013; pp. 1–176. [Google Scholar]
- Lal, R. Degradation and resilience of soils. Philos. Trans. R. Soc. London. Ser. B Biol. Sci. 1997, 352, 997–1010. [Google Scholar] [CrossRef]
- Araujo-Junior, C.F.; Rodrigues, B.N.; Chaves, J.C.D.; Yada Junior, G.M. Soil physical quality and carbon stocks related to weed control and cover crops in a Brazilian Oxisol. In Weed and Pest Control: Conventional and New Challenges; InTech: Rijeka, Croatia, 2013; pp. 181–205. [Google Scholar]
- Araujo-Junior, C.F.; Junior, M.D.S.D.; de Alcântara, E.N.; Guimarães, P.T.G.; Ajayi, A.E. Interrelationships Among Weed Management in Coffee Plantation and Soil Physical Quality. In Weed Control; IntechOpen: London, UK, 2012. [Google Scholar]
- Gajda, A.M.; Czyz, E.A.; Dexter, A.R. Effects of long-term use of different farming systems on some physical, chemical and microbiological parameters of soil quality. Int. Agrophys. 2016, 30, 165–172. [Google Scholar] [CrossRef]
- Koch, H.J.; Heuer, H.; Tomanová, O.; Märländer, B. Cumulative effect of annually repeated passes of heavy agricultural machinery on soil structural properties and sugar beet yield under two tillage systems. Soil Tillage Res. 2008, 101, 69–77. [Google Scholar] [CrossRef]
- Vadiunina, A.F.; Korchagina, Z.A. Methods for Investigation Soil Physical Properties; Agropromizdat: Moskva, Russia, 1986; pp. 1–416. (In Russian) [Google Scholar]
- Hossain, M.F.; Chen, W.; Zhang, Y. Bulk density of mineral and organic soils in the Canada’s arctic and sub-arctic. Inf. Process. Agric. 2015, 2, 183–190. [Google Scholar] [CrossRef] [Green Version]
- Tukey, J.W. Methodology, and the statistician’s responsibility for both accuracy and relevance. J. Am. Stat. Assoc. 1979, 74, 786–793. [Google Scholar] [CrossRef]
- Keller, T.; Arvidsson, J. Technical solutions to reduce the risk of subsoil compaction: Effects of dual wheels, tandem wheels and tyre inflation pressure on stress propagation in soil. Soil Tillage Res. 2004, 79, 191–205. [Google Scholar] [CrossRef]
- Zabrodskyi, A.; Šarauskis, E.; Kukharets, S.; Juostas, A.; Vasiliauskas, G.; Andriušis, A. Analysis of the impact of soil compaction on the environment and agricultural economic losses in Lithuania and Ukraine. Sustainability 2021, 13, 7762. [Google Scholar] [CrossRef]
- Mileusnić, Z.I.; Saljnikov, E.; Radojević, R.L.; Petrović, D.V. Soil compaction due to agricultural machinery impact. J. Terramechanics 2022, 100, 51–60. [Google Scholar] [CrossRef]
- Gürsoy, S.; Sessiz, A.; Kiliç, H.; Bayram, N. Tillage system and cotton residue management effects on soil physical and chemical properties of an Anatolian clay loam sown within a wheat-cotton sequence. Arch. Acker Pflanzenbau Bodenkd. 2011, 57, 391–400. [Google Scholar] [CrossRef]
- Stelluti, M.; Maiorana, M.; De Giorgio, D. Multivariate approach to evaluate the penetrometer resistance in different tillage systems. Soil Tillage Res. 1998, 46, 145–151. [Google Scholar] [CrossRef]
- Newton, A.C.; Guy, D.C.; Bengough, A.G.; Gordon, D.C.; McKenzie, B.M.; Sun, B.; Hallett, P.D. Soil tillage effects on the efficacy of cultivars and their mixtures in winter barley. Field Crop. Res. 2012, 128, 91–100. [Google Scholar] [CrossRef]
- Arvidsson, J. Effects of cultivation depth in reduced tillage on soil physical properties, crop yield and plant pathogens. Eur. J. Agron. 1998, 9, 79–85. [Google Scholar] [CrossRef]
- Lati, R.N.; Siemens, M.C.; Rachuy, J.S.; Fennimore, S.A. Intrarow weed removal in broccoli and transplanted lettuce with an intelligent cultivator. Weed Technol. 2016, 30, 655–663. [Google Scholar] [CrossRef]
- Bleeker, P.; van der Weide, R.; Kurstjens, D.; Cloutier, D.C. Experiences and experiments with new intra-row weeders. In Proceedings of the 5th EWRS Workshop on Physical and Cultural Weed Control, Pisa, Italy, 11–13 March 2002; pp. 97–100. [Google Scholar]
- Rueda-Ayala, V.; Peteinatos, G.; Gerhards, R.; Andújar, D. A non-chemical system for online weed control. Sensors 2015, 15, 7691–7707. [Google Scholar] [CrossRef] [Green Version]
- Pannacci, E.; Tei, F.; Guiducci, M. Evaluation of mechanical weed control in legume crops. Crop Prot. 2018, 104, 52–59. [Google Scholar] [CrossRef]
- Benaragama, D.; Shirtliffe, S.J. Integrating cultural and mechanical methods for additive weed control in organic systems. Agron. J. 2013, 105, 1728–1734. [Google Scholar] [CrossRef]
Figure 1.
Machines used for sugar beet weed control: (a) conventional system—Schmotzer inter-row cultivator; (b) robotic system—FD20 robot (FarmDroid).
Figure 1.
Machines used for sugar beet weed control: (a) conventional system—Schmotzer inter-row cultivator; (b) robotic system—FD20 robot (FarmDroid).

Figure 2.
Experimental design: SPR—soil penetration resistance (MPa); ST—soil temperature (°C); SM—soil moisture (%); EC—soil electrical conductivity (mS·m−1); E—effectiveness of weed control systems (%).
Figure 2.
Experimental design: SPR—soil penetration resistance (MPa); ST—soil temperature (°C); SM—soil moisture (%); EC—soil electrical conductivity (mS·m−1); E—effectiveness of weed control systems (%).
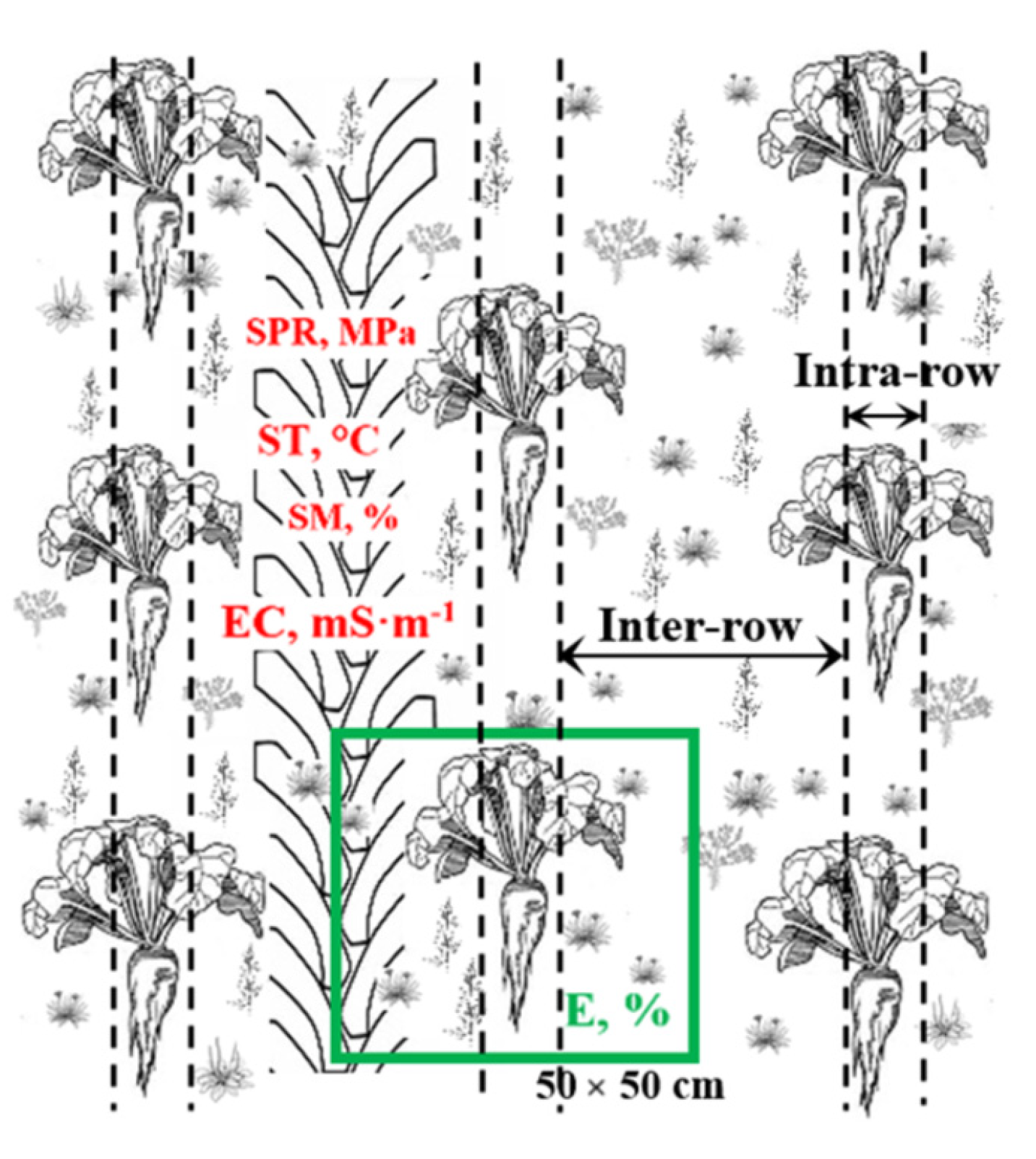
Figure 3.
Soil penetration resistance before and after the weed control process: (a) CWC1 (25 May 2021); (b) RWC (1 July 2021).
Figure 3.
Soil penetration resistance before and after the weed control process: (a) CWC1 (25 May 2021); (b) RWC (1 July 2021).
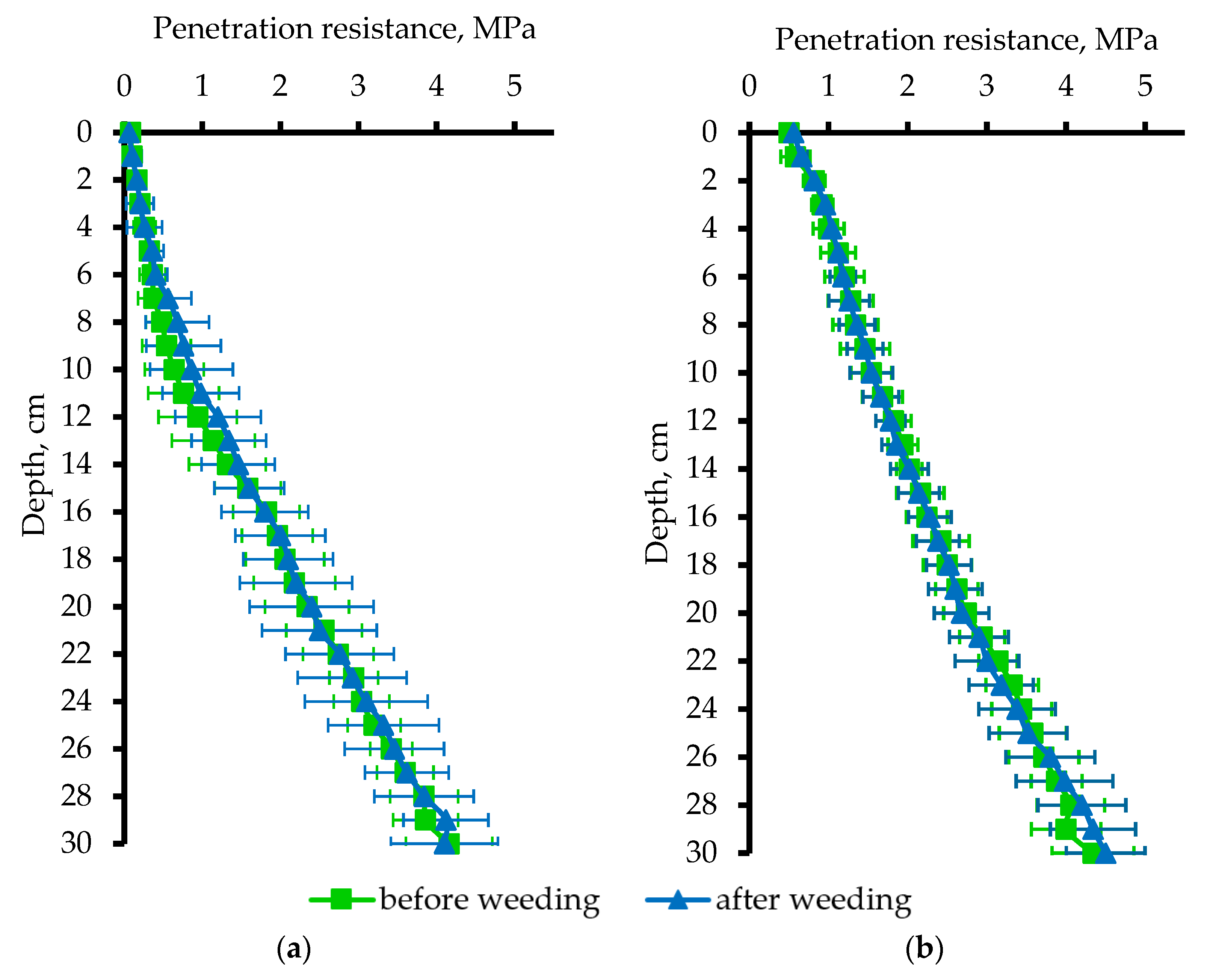
Figure 4.
The impact of different weed control systems on soil moisture, temperature, and electrical conductivity: (a) CWC1 (25 May 2021); (b) CWC2 (4 June 2021); (c) RWC (1 July 2021). Different letters a, b in the figures indicate statistically significant differences.
Figure 4.
The impact of different weed control systems on soil moisture, temperature, and electrical conductivity: (a) CWC1 (25 May 2021); (b) CWC2 (4 June 2021); (c) RWC (1 July 2021). Different letters a, b in the figures indicate statistically significant differences.
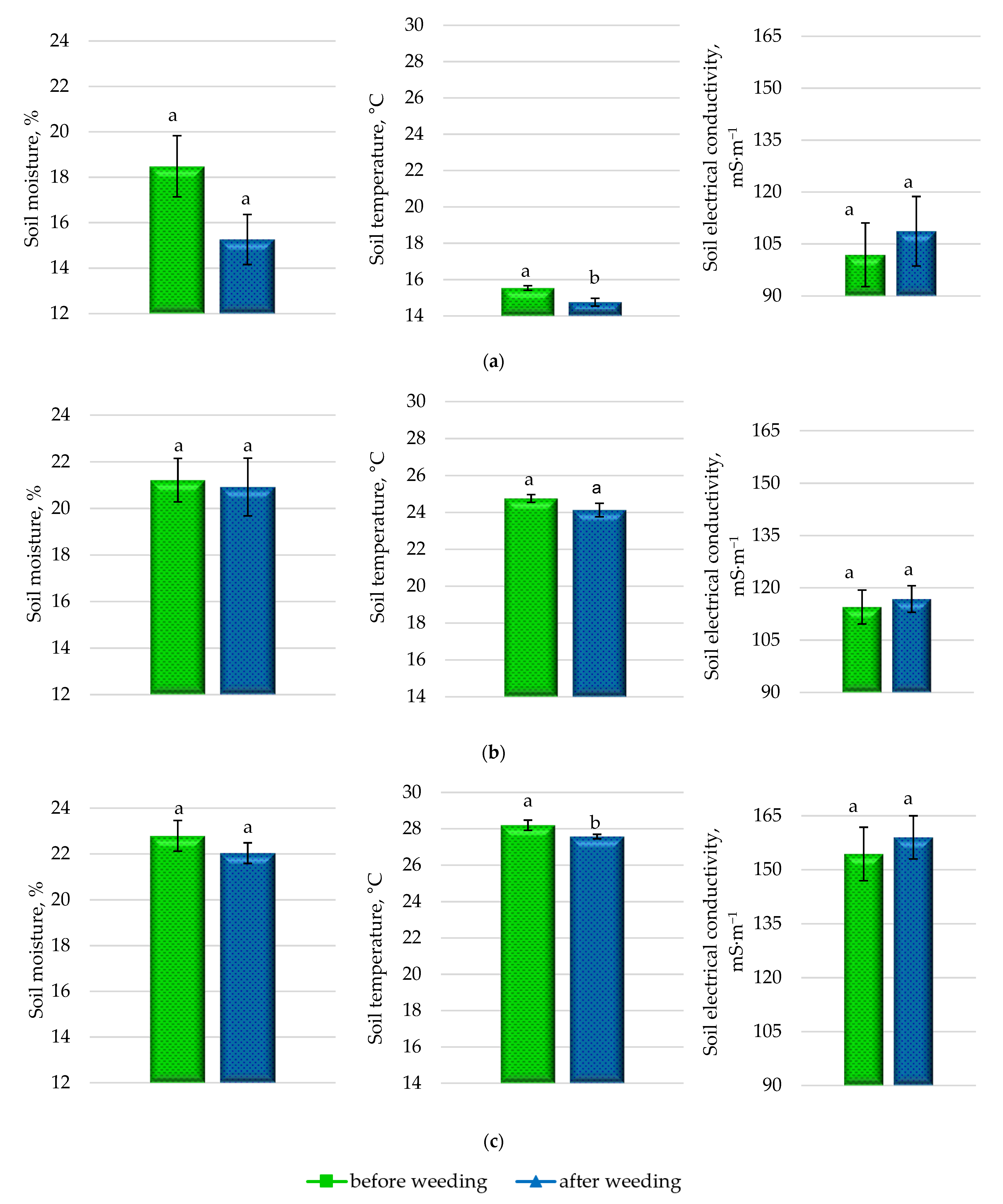
Figure 5.
Soil bulk density before and after the weed control process at depths of 0–10 and 10–20 cm: (a) CWC2 (4 June 2021); (b) RWC (1 July 2021). Different letters a, b, and c in the figures indicate statistically significant differences.
Figure 5.
Soil bulk density before and after the weed control process at depths of 0–10 and 10–20 cm: (a) CWC2 (4 June 2021); (b) RWC (1 July 2021). Different letters a, b, and c in the figures indicate statistically significant differences.

Figure 6.
Effectiveness of conventional and robotic weed control systems in sugar beet inter-rows.
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Bručienė, I.; Buragienė, S.; Šarauskis, E. Weeding Effectiveness and Changes in Soil Physical Properties Using Inter-Row Hoeing and a Robot. Agronomy 2022, 12, 1514. https://doi.org/10.3390/agronomy12071514
AMA Style
Bručienė I, Buragienė S, Šarauskis E. Weeding Effectiveness and Changes in Soil Physical Properties Using Inter-Row Hoeing and a Robot. Agronomy. 2022; 12(7):1514. https://doi.org/10.3390/agronomy12071514
Chicago/Turabian StyleBručienė, Indrė, Sidona Buragienė, and Egidijus Šarauskis. 2022. "Weeding Effectiveness and Changes in Soil Physical Properties Using Inter-Row Hoeing and a Robot" Agronomy 12, no. 7: 1514. https://doi.org/10.3390/agronomy12071514
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.