1. Introduction
Wild blueberry (
vaccinium angustifolium Ait.) is a perennial crop native to Canada’s Maritime provinces, Quebec, and Maine, USA. They are typically managed on a biennial cycle in order to maximize yields and optimize input efficiency [
1,
2,
3,
4,
5,
6,
7]. This cycle begins with the sprout year where blueberry stems emerge from underground rhizomes in early spring and grow until tip dieback in mid July through early August up to a height of 380 mm [
8]. Wild blueberry then overwinters, and spring of the second year brings fruit bud emergence and development throughout summer. Ripe fruit is harvested in mid to late August through to the middle of September when berries are blue in color and have an average diameter of 9.7 mm and an average weight of 0.49 g [
9]. Following harvest, fields are mowed in mid to late fall and the cycle restarts. Unlike traditional row crops, wild blueberry fields cannot be tilled and are often quite hilly and rough. Slope mapping in Nova Scotian wild blueberry fields showed that in-field slope can be up to 31° [
10]. Depending on the field, the same study went on to show that over 30% of a field could have slopes greater than 12°. These slopes can change dramatically over the course of a few meters given the natural, untilled state of the fields. This serves to create a potential challenge as the inconsistent terrain may impact the performance of the autosteer systems.
Wild blueberry is a critical crop for the Nova Scotian economy and makes up the greatest proportion of any agricultural export within the province. Total exports for 2019 were
$139.5 million, which accounted for over one third of all agri-food exports from Nova Scotia [
11]. Despite this representing an 83% increase in export value since 2017 [
12], the industry continues to suffer from key production challenges. The most prevalent of these challenges is the shortage of skilled harvester operators necessary to harvest the over 86,000 ha of wild blueberry cropland throughout northeastern North America [
13].
Mechanical harvesting of wild blueberries began in the 1980′s when cranberry harvesters were adapted for the wild blueberry crop [
14]. The years since have seen several critical advancements to the technology and we are at a point where over 80% of wild blueberries in Canada are harvested mechanically [
15]. Doug Bragg Enterprises (DBE) are the only large-scale manufacturer of wild blueberry harvesters, with over 1500 in use throughout northeastern North America [
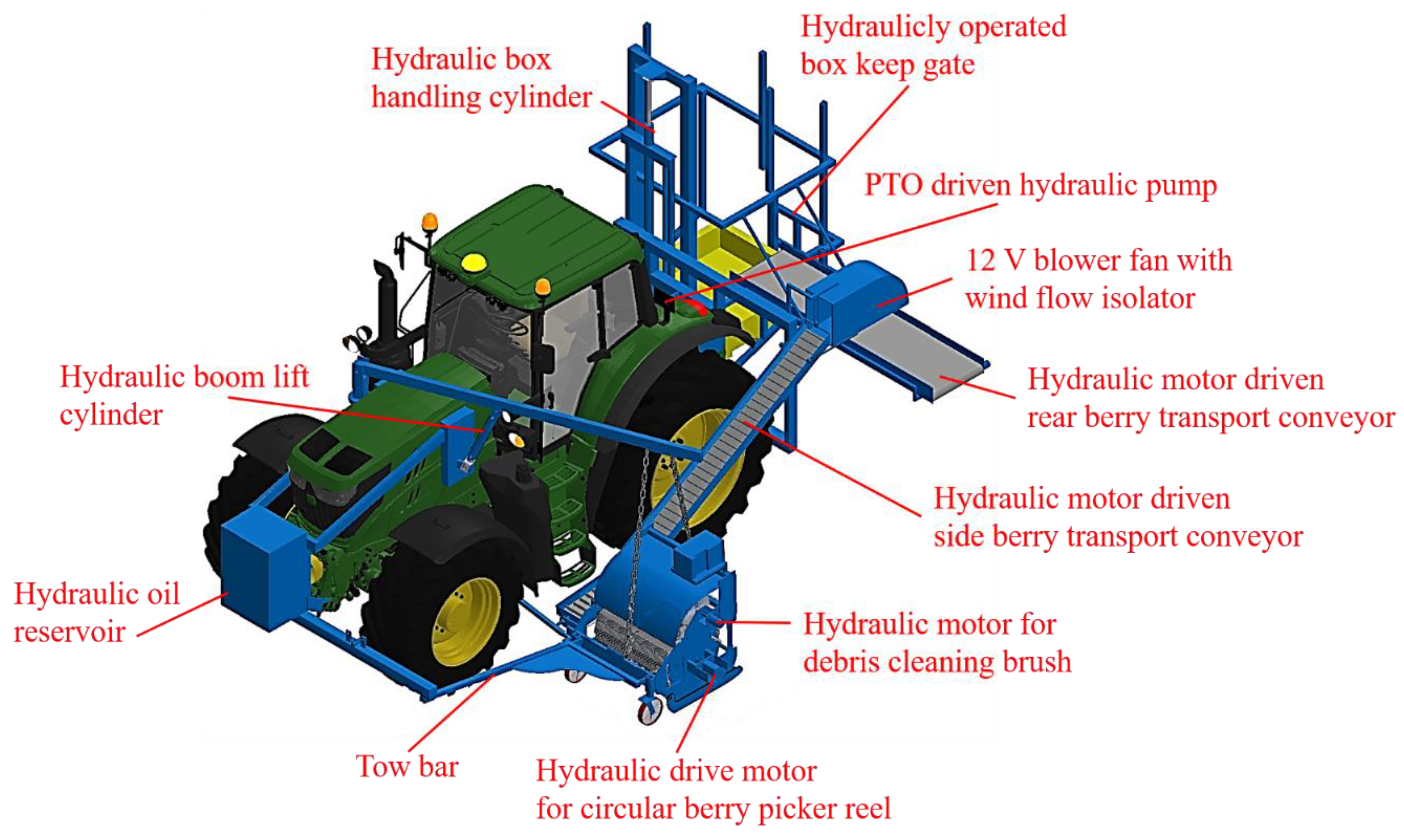
16]. The DBE harvester utilizes a 660 mm (diameter) by 863.6 mm (length), variable speed, cylindrical picking head [
9]. The rotational speed along with the height of the harvester head are all controlled manually by the operator inside the tractor. After being picked, the berries make their way up the side conveyor to a blower fan, which can remove over 95% of debris under optimal conditions [
9]. The fruit then travels along the rear conveyor and enters a storage bin (
Figure 1). The storage bins are loaded onto the harvester via a second tractor but are changed and unloaded via the operator from the cabin of the harvesting tractor. Under a variety of picking conditions, DBE harvesters have seen observed picking efficiencies ranging from 82–94% in terms of total, undamaged harvested fruit [
17].
There also exists a variant of the DBE harvester that utilizes small boxes, where a laborer stands on the back of the harvester and changes the boxes manually every few seconds. This design however has been proven to be much less efficient in terms of time and economic efficiency [
18]. At the same time as when the operator is moving the harvester head and changing/dropping the bins, they must also drive the tractor. This is wherein lies the problem in that operating the harvester head requires the operator’s attention be out the side of the harvester, operating the bin handling system requires attention out the rear of the harvester, and driving the tractor requires attention out the front of the harvester. Even for the most skilled operator, it is an impossibility that all these tasks can be completed at the same time without efficiency reductions. Steering the tractor is typically the task that takes the least precedent given the demand for high quality berries, which relies on precise picker head positioning and avoiding overfilling bins. In practice, this means that under and over lapping is quite common when harvesting, which results in crushed berries, missed berries, and time loss.
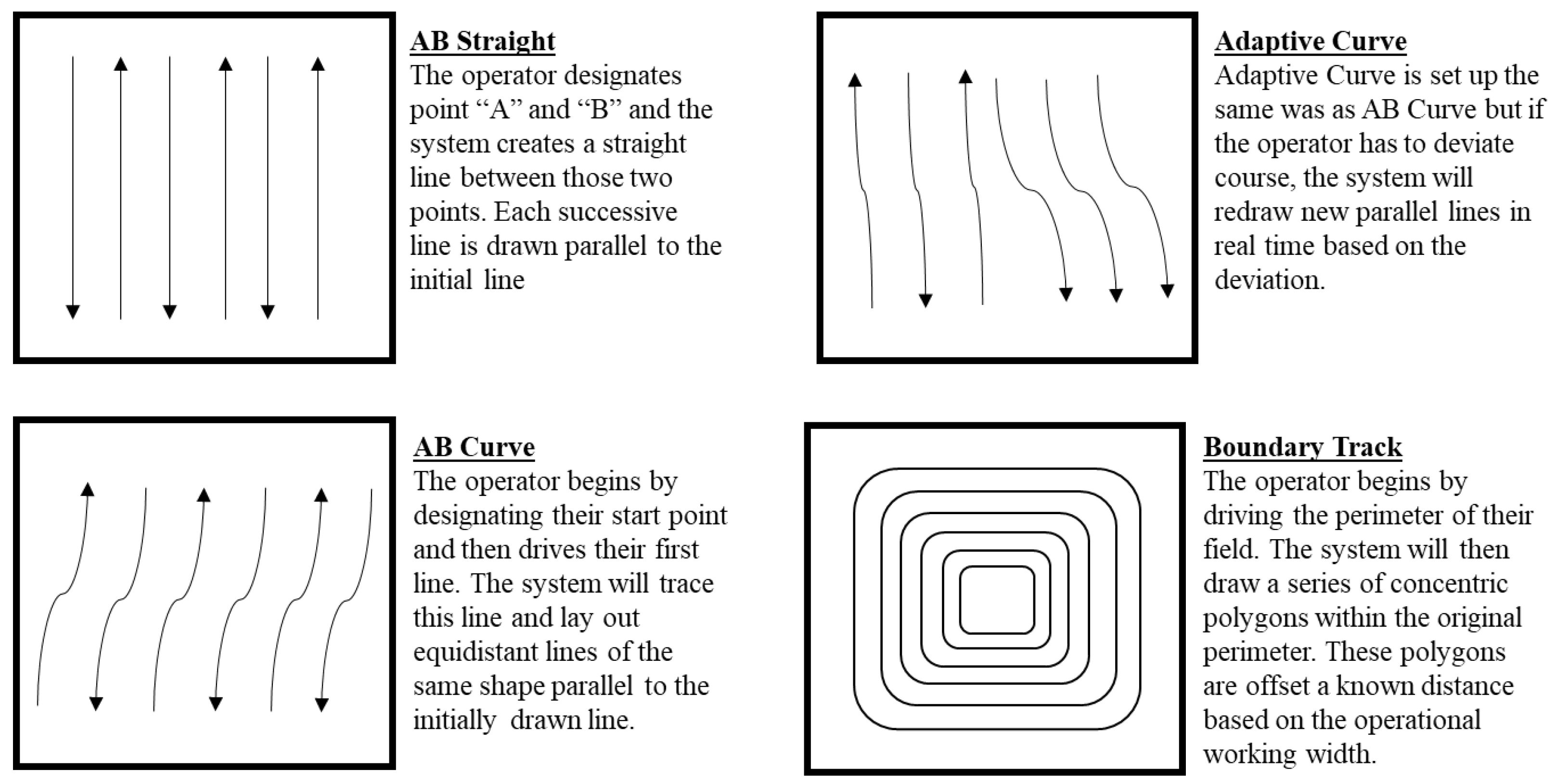
Automatic guidance in agriculture can be broken down into two primary categories, those that utilize a light bar and manual steering and those with autosteer. For the purposes of this study, we will focus on the autosteer system. An autosteer system relies on Global Navigation Satellite Signal (GNSS) for precisely and accurately determining the position of the receiver. These receivers must be precisely positioned and oriented on agricultural equipment to ensure the greatest degree of accuracy when performing an operation. Based on the GNSS position from the receiver and the measurements of the agricultural equipment, autosteer can automatically steer the equipment based on the guidance line pattern dictated by the operator. A series of common guidance line patterns and descriptions can be observed in
Figure 2.
Regardless of the guidance line pattern, the control system draws the guidance lines and understands the proper location where the equipment should be. It then corrects the steering to ensure that the implement remains as close to the appropriate guidance line as possible. Autosteer systems can either be plumbed into the existing hydraulics of the equipment or mounted onto the steering column. Several larger series tractors come autosteer ready, which allows the tractor to steer via the factory hydraulic system. Older models or smaller series tractors can either upgrade their hydraulic steering system to have autosteering functionality, or an electronic steering motor can be incorporated into the steering column as a mechanical means of controlling the tractor’s positioning. It is well established that GNSS automated guidance systems are a profitable investment for growers [
19,
20,
21] in a variety of cropping systems; however, this technology has not been evaluated under the unique constraints of the wild blueberry harvesting system.
John Deere’s Starfire 6000 receiver can receive positioning signals from both the Global Positioning System (GPS) as well as the Russian Global Navigation Satellite System (GLONASS). The system also has access to a series of global reference stations and seven differential correction satellites [
22]. At any given time, the system will access as many of these satellites as possible and select the strongest correction signal to provide the greatest degree of accuracy. Satellite performance is constantly analyzed and switches between correction signals are made automatically following a series of checks [
22]. This way, correction signals will only change when the system is sure of a stronger signal, thereby eliminating a scenario where the correction signal switches rapidly and introduces potential error [
22]. There are three signal levels within the Starfire (SF) 6000 system, SF1, SF3, and Real time Kinematic (RTK). SF1 advertises pass-to-pass accuracies of ±150 mm, SF3 advertises ±30 mm, and RTK advertises ±25 mm [
23]. These discrepancies are based on 95% confidence intervals over 15-min periods, under perfect atmospheric conditions, and do not take into account autosteering mechanical error, ground conditions, or drift. It should be noted that GNSS position is significantly affected by atmospheric conditions and the number of satellites available [
24,
25]. The SF1 level does not offer reproducibility as the position can drift over time. SF3 offers in season reproducibility with the same ±30 mm error. RTK offers season to season reproducibility with the same ±25 mm error [
23]. Reproducibility of operations in wild blueberries does make sense for things such as spraying or spreading agrochemicals; however, controlled traffic farming (CTF) and soil compaction are relatively unexplored areas of wild blueberry research [
26]. Unfortunately, given the small working width (860 mm) of the wild blueberry harvester, CTF is not a possibility as passes must be made quite close to one another. This results in most of the field being driven over by the harvester, therefore defeating the purpose of CTF.
When assessing autosteering systems versus manual steering, autosteering systems have been shown to be up to five times more accurate than a skilled operator [
27]. Studies have gone on to suggest that mowing overlap decreased from 5.03% to 2.34% when using autosteer versus a skilled operator [
28]. Another similar study showed that manual tillage by a skilled operator had an average overlap of 277 mm while an autosteer system using John Deere’s SF2 correction signal level had an average overlap of only 16 mm and a maximum overlap of 45 mm [
29]. Berning 2011 [
30] observed between a 50- and 60- mm reduction in overlap for sowing operations compared with manual driving. Kise et al. 2001 [
31] demonstrated that rotary tillage could be performed at 1.5 m s
−1 within an error of 60 mm from their designated pathway. Noguchi et al. 1998 [
32] developed an RTK-GPS based robot tractor with less than 30 mm of error at a travel speed of 2.5 m s
−1. While these studies display a promising trend, the comparatively small working width of the wild blueberry harvester head was anticipated to create some challenges for the autosteering system. To maintain the implement on the correct line the system would likely require more adjustments and the effects of over or underlapping were anticipated to be more severe. Further, the wild blueberry harvester is a side mounted implement, which is not accounted for within John Deere’s Auto-Trac 300 software. There is also the concern of travel speed. John Deere’s Auto-Trac 300 advertises a low speed cut out of 0.22 m s
−1 [
33], which is only slightly slower than the range of 0.31 m s
−1 to 0.58 m s
−1, which is the speed at which wild blueberries are typically harvested. If this cut out speed is higher than advertised, it may become difficult if not impossible to harvest wild blueberries using GNSS autosteer.
This novel research was conducted as part of a larger work progressing towards full wild blueberry harvester automation. To reach this goal, a method of steering the harvester is required. A GNSS autosteer based approach has the greatest potential to provide consistent pass-to-pass accuracy automatically with limited support from the operator on headlands. While GNSS autosteer has been implemented thoroughly in seeding, spraying, fertilizing, crop sensing, and harvesting of traditional row crops, the unique characteristics of the wild blueberry cropping system make it a completely different challenge for this technology [
34,
35]. Due to the challenges introduced by the slow harvesting speeds, small working width, and side mounted implement, GNSS autosteer incorporation in wild blueberry harvesting has never before been explored. Success of this project would represent both a short-term benefit for harvester operators as well as make promising steps towards the ultimate goal of full automation of the wild blueberry harvester.
2. Materials and Methods
The study was conducted across four commercially managed fruiting fields in central Nova Scotia during harvest in mid to late August. Names, locations, yields, and harvest dates of these fields are summarized in
Table 1.
The variability in crop and field conditions requires continuous operator attention to properly adjust the harvester picking reel and maintain optimum berry recovery. A field map depicting the rough terrain of Site 1 can be observed in
Figure 3. It was anticipated that this rough terrain would cause difficulties for the autosteer system in maintaining the harvester on the target line.
In order to quantify slope in field, 20 randomly selected points were assessed within each of the fields. Slopes were referenced as their absolute slopes and measured in degrees. Minimum, maximum, and average slopes for each of the fields can be observed in
Table 2.
As all data were collected in 2019, the fields used in this study were impacted by the late June frost event of 2018 during their sprout year [
36]. This resulted in a reduction in harvestable fruit, which caused some challenges when attempting to line up subsequent passes of the harvester and when harvesting manually. All operators noted this difficulty was not something they had experienced in previous years.
Two different GNSS signal levels were analyzed for their ability to determine the position of the wild blueberry harvester precisely and accurately. These included John Deere’s SF1 and SF3 signals. Both signal levels utilized John Deere’s Starfire 6000 receiver with the built in terrain compensation module for acquiring the positions and John Deere Auto-Trac 300 for autosteering. Manual harvesting samples were also collected as a point of comparison versus the GNSS signals. Season to season reproducibility was not analyzed given the redundancies of reproducibility in harvesting operations and the fact that it is not required for commercial harvester users.
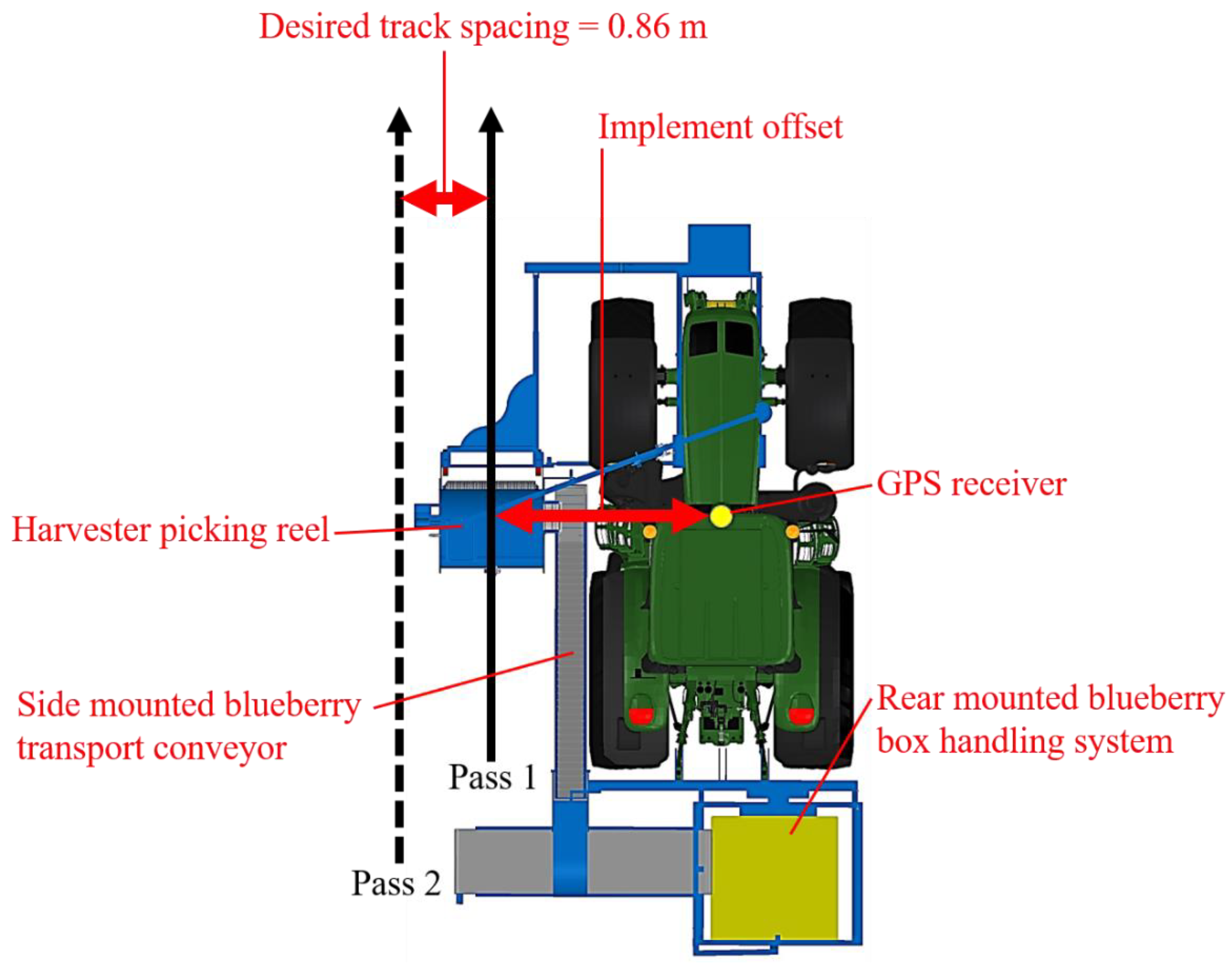
To account for John Deere Auto-Trac 300′s lack of support for side mounted implements, the wild blueberry harvester was set up as a front 3-point mounted implement with a lateral offset of 2.21 m to the left. The John Deere 5085M tractor was then set up so that the software understood the front 3-point hitch to be only 1.50 m in front of the rear axle. In reality, the front 3-point hitch is located 3.09 m in front of the rear axle. In this way, the software assumed there was a 3-point hitch beyond the left side extent of the tractor, 1.50 m in front of the rear axle (
Figure 4).
This setup simulated the effects of a side mounted implement and did not cause any noticeable software or practical difficulties. All settings within Auto-Trac 300 were left on default and the targeted overlap was set to 0 mm throughout the analysis. A summary of these settings and their functions can be observed in
Table 3.
Three different harvesting speeds were analyzed to observe how the signal positions were affected by travel speed. The selected speeds were 0.31 m s
−1, 0.45 m s
−1, and 0.58 m s
−1. These speeds were selected as they are representative of the range of harvesting speeds for a wild blueberry harvester [
16]. Depending on fruit density, topography, and weather, the optimal harvest speed may increase or decrease within this range and, therefore, analyzing the consistency of the signals at various speeds is critical.
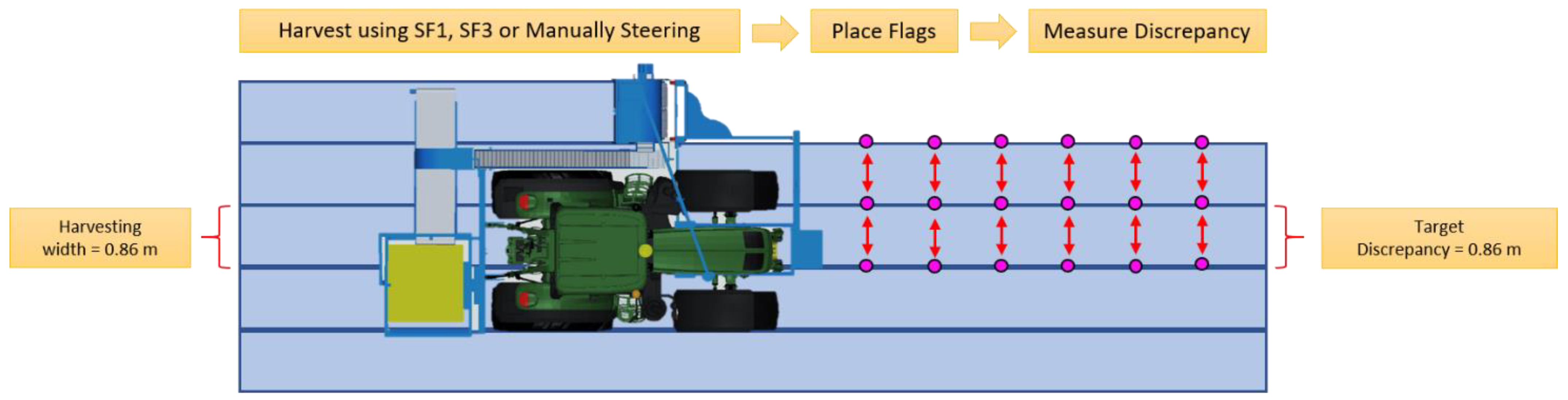
The result of these treatments (speed and signal) is a replicated 2 by 3 factorial with four blocks. The treatment combinations within each block were randomized to ensure independence. Each field (block) was broken up into four sides and an initial pass was performed with each treatment combination prior to data collection for that treatment combination. This was done to account for any positioning discrepancies that occurred when switching between the SF1 and SF3 signal levels. After the initial pass, ten flags were placed 5 m apart along each of the four sides of the field, in line with the inside travel wheel of the harvester. Locating this point was simple, as the travel wheel left an indentation among the blueberry plants and foliage. From here, a second pass of the field was performed using the same treatment combination and the distance to the mark left by the travel wheel was once again marked and recorded manually using measuring tape. For each treatment combination, three replications were measured one after another to ensure pass-to-pass consistency (
Figure 5). A general linear model and Fisher’s Least Significant Difference (LSD) multiple means comparison was used to analyze the data. All statistical analyses were performed in Minitab 19 [
37].
3. Results and Discussion
The field was used as a blocking factor in this analysis and was deemed to be significant (
p < 0.001). This was not a surprise as it is well established that GNSS positioning is significantly affected by atmospheric conditions and the number of satellites available [
24,
25]. While these parameters were not collected due to feasibility constraints, it was noted by the harvester operator that the number of satellites providing signal for the autosteer system changed quite often throughout the harvesting process. Therefore, it is reasonable to suggest that the availability of satellites and subsequent changes in signal strength were more the cause of this significance than the fields themselves, given the relative lack of physical differences between the fields. As signal reliability is one of the aspects being analyzed by this work, this result could demonstrate that signal strength and accuracy are varying significantly based on external factors. More work would be required in this area to confirm this hypothesis.
Using a general linear model, it can be determined that the interaction between signal level and speed was not statistically significant (
p = 0.083) for absolute pass-to-pass discrepancy. Therefore, the factors were analyzed individually (
Table 4), and it was determined that signal level had a significant effect (
p < 0.001) on absolute pass-to-pass discrepancy while travel speed did not (
p = 0.174).
Mean absolute pass-to-pass discrepancies of both the SF1 and SF3 signal levels were 98.6 mm and 75.9 mm, respectively. This result indicates that while there is a significant increase in accuracy with the SF3 signal level, the difference is only 22.7 mm on average. Additionally, if you consider the maximum absolute pass-to-pass discrepancies of both signal levels, SF1 had a maximum of 425.3 mm while SF3 had a maximum of 368.3 mm. In looking at John Deere’s reference material, they claim that using the Starfire 6000 with the SF1 signal level will have a 95% confidence interval for pass-to-pass discrepancy of (−150 mm, 150 mm), while the same receiver using SF3 will have a 95% confidence interval discrepancy of (−30 mm, 30 mm) [
23]. Their documentation goes on to state that these confidence intervals are based on 15-min periods given ideal atmospheric and satellite conditions. The 95% confidence intervals achieved in this study were (−248.8 mm, 279.0 mm) for SF1 and (−204.6 mm, 226.2 mm) for SF3. With that said, these data were taken over four days and could not ensure ideal atmospheric and satellite conditions. Despite this, there is certainly an observable difference between the published marketing values and the practical observed values. One potential reason for the discrepancy could be the relatively small working width of the harvester head of only 863.6 mm. It is possible that the small size of the implement created challenges for the autosteering system as even small deviations from the target line could create over or under compensation scenarios by the autosteer system. A second possibility is that the harvester is a side mounted implement and the Auto-Trac 300 software does not support this type of equipment. As a result, the software had to be manipulated to have it think the harvester was front mounted. This set of parameters may have caused some issues in properly locating the implement on the target line. The slow travel speeds of the harvester may also be to blame, though there were no significant differences observed between the speeds in terms of absolute offsets. There is also a small amount of vertical play at the harvester head, which occurs to compensate for the wild blueberry field’s rough terrain. This play could slightly alter the distance from the receiver to the picking point, which may be causing some of the observed error. It should also be noted that all of Auto-Trac 300′s settings (
Table 3) were left on default for the purposes of this study. Altering some of these settings could potentially improve the accuracies of both signal levels. Given that the SF1 signal level is a free subscription while the SF3 signal level costs
$1418 year
−1, harvester operators will need to determine whether this additional cost is justified. Should an operator wish to use the Starfire 6000 system for other operations such as spraying or spreading agrochemicals, mowing, or operations in other cropping systems, the reproducibility offered by the SF3 level might also justify the additional subscription cost.
There were initially concerns that the slow travel speed of the harvester might cause some issues for the GNSS autosteer system. The lack of significant differences (
p = 0.174) between the travel speeds indicates that this was not an issue though, they may have led to some of the pass-to-pass discrepancies that are not in line with the manufacturer’s literature. It should also be noted that the harvester operators did not encounter any instances where the autosteer system turned off due to the slow travel speed. This is in accordance with the parameters of the Auto-Trac system, which advertises a low-speed cut-out of 0.22 m s
−1 [
33].
The second objective was to analyze how the signal levels performed versus an experienced tractor operator. In this study, there was no significant difference between the two operators (
p = 0.282), and therefore, their data were combined for comparison versus the SF1 and SF3 signal levels. This comparison can be observed in
Table 5.
Manual harvesting by an experienced tractor operator resulted in significantly greater pass-to-pass discrepancy than either the SF1 or SF3 signal levels. For an industry that struggles to find experienced operators, this is a key result. Wild blueberry harvesting inexperience can be compensated for through the use of an autosteer system by significantly increasing the pass-to-pass accuracy of the harvester. The use of autosteer has the added benefit of allowing the harvester operator to direct more of their attention to maintaining the harvester head within the fruit zone and avoiding over or underfilling bins. This all culminates in higher quality berries with lower losses and less debris. The 95% confidence interval for manual harvesting was (−210.9 mm, 331.8 mm). Unlike SF1 and SF3, this shows a tendency of the harvester operators to underlap and miss berries as opposed to overlapping. While this seems odd, it should be noted that data were collected during the 2019 harvest season in fields that were affected by the 2018 June frost event [
36]. This meant that there were less berries on the plants than is typical due to injury resulting from growth inhibition during the sprout year for these fields. As a result, the harvester operators noted that in some areas of the field it became difficult to visually observe where they should have been harvesting due to the lack of berries. Significant weed coverage in some areas of the field also caused challenges for properly observing where to harvest. This is a further argument for the use GNSS autosteer in wild blueberries as it is not impacted by the same visual impediments.
4. Conclusions
For harvesting wild blueberries, both the SF1 and SF3 signal levels performed better than a manual operator. That said, neither level was able to achieve the degree of accuracy advertised by the manufacturer. Despite this, the results of this study suggest that in the absence of skilled operators, an autosteer system can ensure that a high degree of accuracy can still be achieved with either level. There are also advantages for skilled operators in that they can focus more of their attention on harvester head height adjustments and switching bins. This will have the added benefit of harvesting higher quality berries, with less debris and subsequently fewer losses. It should be noted that this study was limited to fields affected by the 2018 late frost event, which may have slightly altered the results. That said, use of an autosteer system should account for most of these challenges. A further limitation of this study is that it only analyzed the John Deere Starfire 6000 system. Analyzing other systems could provide a more holistic picture of autosteer systems and their potential for aiding in wild blueberry harvesting.
In choosing between the SF1 and SF3 levels, the determination will come down to cost and the question of reproducibility. While the SF3 level was significantly more accurate, it requires a yearly subscription of $1418 yr−1. That said, SF3 provides year to year reproducibility, which could aid in controlled traffic farming efforts for spraying or spreading agrochemicals, mowing, or implementation in other cropping systems. The ultimate decision will come down to how the operator plans on implementing the system and whether they value the additional accuracy and reproducibility. A future study will break down the economics of upgrading to an autosteer system versus traditional manual mechanical harvesting.
This study represents the first successful implementation of GNSS autosteer in wild blueberry harvesting. Further, the results of this study represent a promising step in the realization of a fully automated harvester. It is now established that GNSS autosteer systems can provide similar and even superior pass-to-pass accuracy than a manual operator when harvesting wild blueberries.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}