1. Introduction
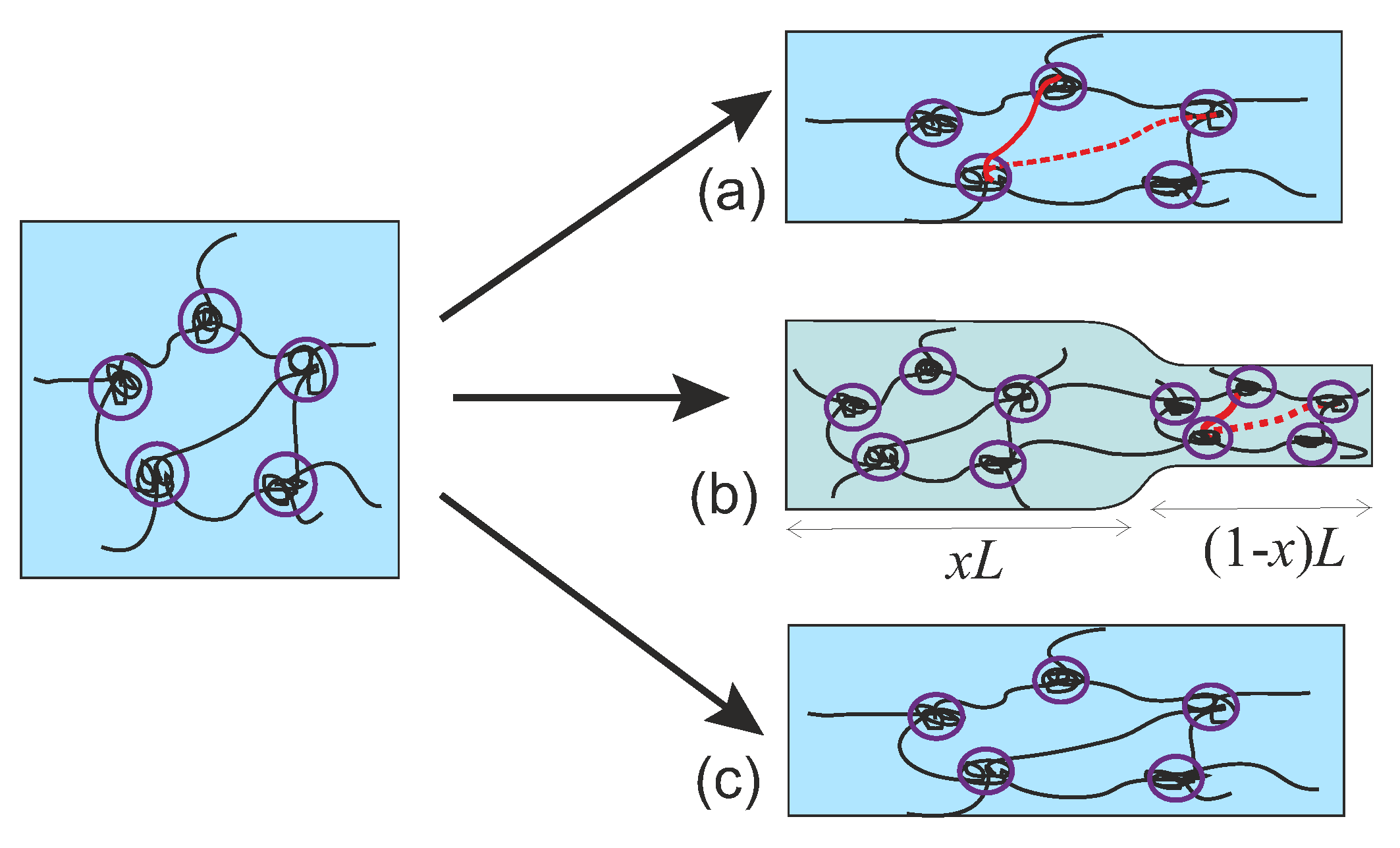
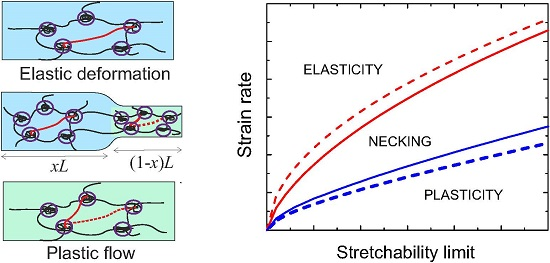
When a transient or dynamically crosslinked gel is uniaxially stretched as schematically shown in
Figure 1, it can behave as a plastically flowing melt upon a slow rate of deformation, as an elastic rubber under a fast rate of deformation—or it may enter an intermediate regime of coexistence when a neck is formed, connecting a highly and a weakly deformed region in the sample. Moreover, due to the ability of transient crosslinks to break and re-connect in the network, the above processes can be repeated for many cycles without inducing any permanent damage to the material. Materials with such self-healing properties have become attractive for many applications in biological substitutes, bio-compatible sensors, drug delivery, and various industrial settings, as reviewed in [
1,
2,
3,
4].
All of these self-healing materials have a common feature: crosslinks in the network can be dynamically broken and reformed. The dynamic crosslinks, mainly categorized into physical ones and chemical ones, can be obtained in various ways. Physically, the chains can be crosslinked via hydrophobicity [
5,
6,
7], hydrogen bonding [
8,
9], ionic interaction [
9], crystallization [
10,
11,
12],
etc. This class of materials is quite commonly used in what is called “shape memory” plastics, where a given shape of sample may be (re)recorded by plastic deformation at high temperature, and fixed by the physical (re)crosslinking [
12,
13,
14]. Chemically, crosslinking of polymer chains can be achieved in forms of disulfide bonding [
7], imine bonding [
15], reversible radical reaction [
16],
etc. Recently, there was a new type of transient network reported, named “vitrimer” [
17,
18,
19], in which chemical groups of polymer chains exchange via transesterification reaction or transamination of vinylogous urethanes.
A transient network under small deformations is well studied theoretically, from either a microscopic [
20,
21,
22,
23,
24] or a macroscopic viewpoint [
25,
26], where the crosslinks are dynamically broken and reformed all the time. Such theories are valid when the material undergoes a sufficiently small deformation, so the constituting chains remain Gaussian, but cannot be accurate for large deformations when the network chains may be stretched significantly past the Gaussian limit (exploring their finite extensibility). Normally, in models of rubber elasticity, the finite extensibility regime is not very important because most of the relevant physical effects occur (and are well-described) within the limit of Gaussian network chains. However, due to a possibility of plastic flow in the transient network, the regime of large chain extension can be reached rapidly, and so the theory needs to incorporate the finite-extensibility limit. Until now, only a few theoretical studies have looked at a transient network under a large deformation. Wang and Hong [
27] proposed a macroscopic theory for a dual networks where one transient network (with no ability to re-connect broken crosslinks) and one permanent network penetrate each other under a finite deformation, using the Gent model [
28] as the continuum elasticity model for finite deformations. This work was later developed by Long and Hui [
29,
30] by adding the ability of crosslinks to re-connect. However, neither work allowed for the plastic flow, since the second interpenetrating network remains permanent and elastic all the time. Moreover, in these studies, the dynamics of transient crosslinks is treated empirically by assuming an expression for the evolution of the crosslinks in the network, with several phenomenological parameters to be fitted to experiments. As a result, necking instability is successfully predicted by them. However, compared with the much detail and success in explaining the response of the transient network under a small deformation, the understanding on how a transient network responses to a “finite deformation" is still relatively poor.
In this work, we will bridge the macroscopic deformation of the whole network and the microscopic dynamics of the crosslinks in a unified framework by assuming affine deformation of the network. Macroscopically, we will use the Gent model for finite rubber elasticity to describe the deformed energy of the transient network when its reference state is dynamically changing. Microscopically, the breakage and the reforming of the crosslinks depend on the local forces exerted on the polymer chains, which can be obtained from the continuum energy density. By applying this general model, we will discuss how a transient network deforms when undergoing a uniaxial extension, which is a traditional testing geometry in rheology. As an extension, a dual transient network will also be studied at the end of this paper.
3. Deformation of Uniaxial Extension
Now, we concentrate on a specific case, where the network is stretched uniaxially. It is a commonly applied method for studying dynamic mechanical response of viscoelastic materials. There are several characteristic phenomena found in this experimental geometry, including yield (stress overshoot) and a “neck” formation. Theoretically, the yield of a transient network is relatively well understood; it happens when most of the crosslinks break and reform without memorizing the deformation history. A theory of necking instability was recently proposed for a dual network gel [
27,
29,
30], where the physical reason is thought to be the competition between the plasticity of the transient and the elasticity of the permanent network components. Necking phenomena appear in other systems, such as plastics and metals, but the defining factors there can be different and usually depend on specific interactions between molecules or atoms in different materials.
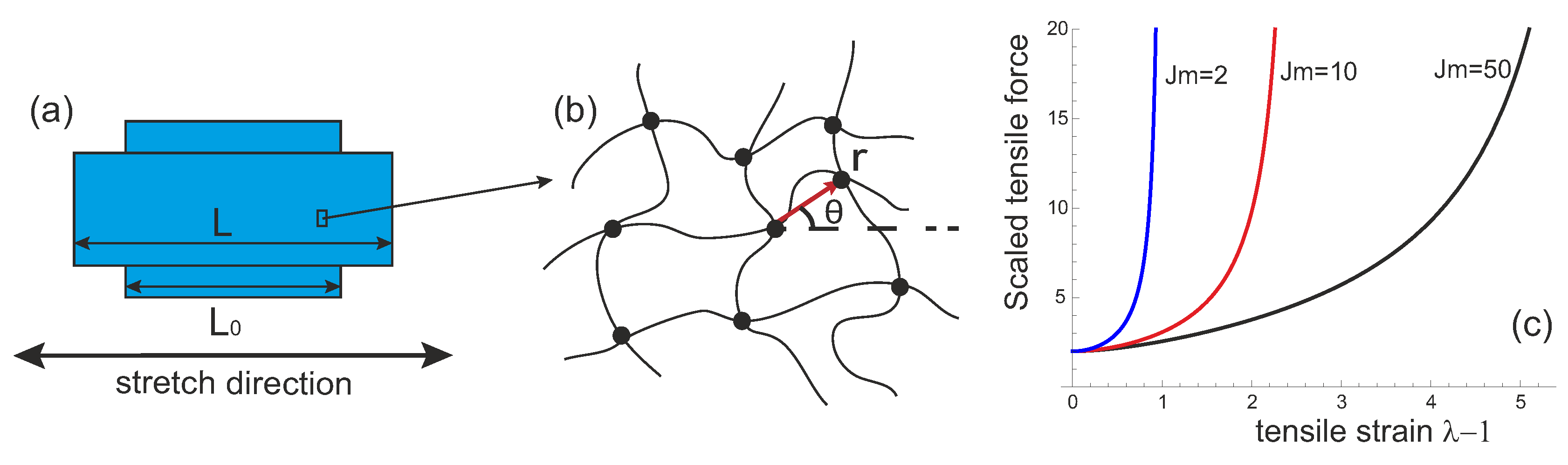
Let us consider an elastic network uniaxially stretched along
z axis, with the stretching ratio
measured from its reference state at time
. The incompressible deformation tensor takes the form:
By inserting this deformation tensor into Equation (
14), the constitutive relations for the principal components of engineering stress along and perpendicular to
z can be expressed as:
In the uniaxially stretched sample unconstrained from perpendicular directions, the stresses along
x and
y axes should be zero. This defines the value of Lagrange multiplier
p, and then the tensile engineering stress along
z axis is obtained by substituting
and grouping similar terms:
With this constitutive relation, we now can study how the dynamic mechanical response of a transient network, depends on an applied strain amplitude and rate, e.g., during a linear-ramp deformation with the stretching ratio . Note that this system has an internal characteristic time scale, equal to , and both the rate of re-crosslinking and the rate of imposed strain need to be measured against that scale. Note that the true tensile stress along z (defined as the tensile force per unit area of current sample cross-section) is equal to in an incompressible system. In the infinitesimal deformation limit of a fixed rubbery network, at , this true stress can be approximated as , equal to the engineering stress , defining the linear Young modulus .
It is difficult to evaluate the multiple nested time-integrals in the Equation (18). For a straightforward numerical calculation, a small time interval
is chosen (using the bare breaking rate
as the dimensional time scale). Then, the stress along the stretching direction at a time
can be obtained by discretising the expression:
For example, after the first time step , the stretch ratio along the stretch direction of the material becomes . Correspondingly, the first strain invariant for the material with the reference state at time is . The ratio of the chains remaining crosslinked from the time to is , which can be obtained from Equation (2). In this interval of time, there are newly crosslinked chains established, for which the reference state is set at the time . Since, under our assumptions, the newly crosslinked chains do not contribute to stress, the stress after the first time step is: . After another time step, the stretch ratio of the system becomes , and the first strain invariant of the material with the reference state at is . For the fraction of chains with the reference state at , the first strain invariant becomes . Note that the chains crosslinked at now start to contribute to the total stress, by the amount: . At the same time, the stress contribution of the crosslinked chains surviving from to decreases to: . Adding these two contributions, we can obtain the stress and move to the next time step in Equation (19).
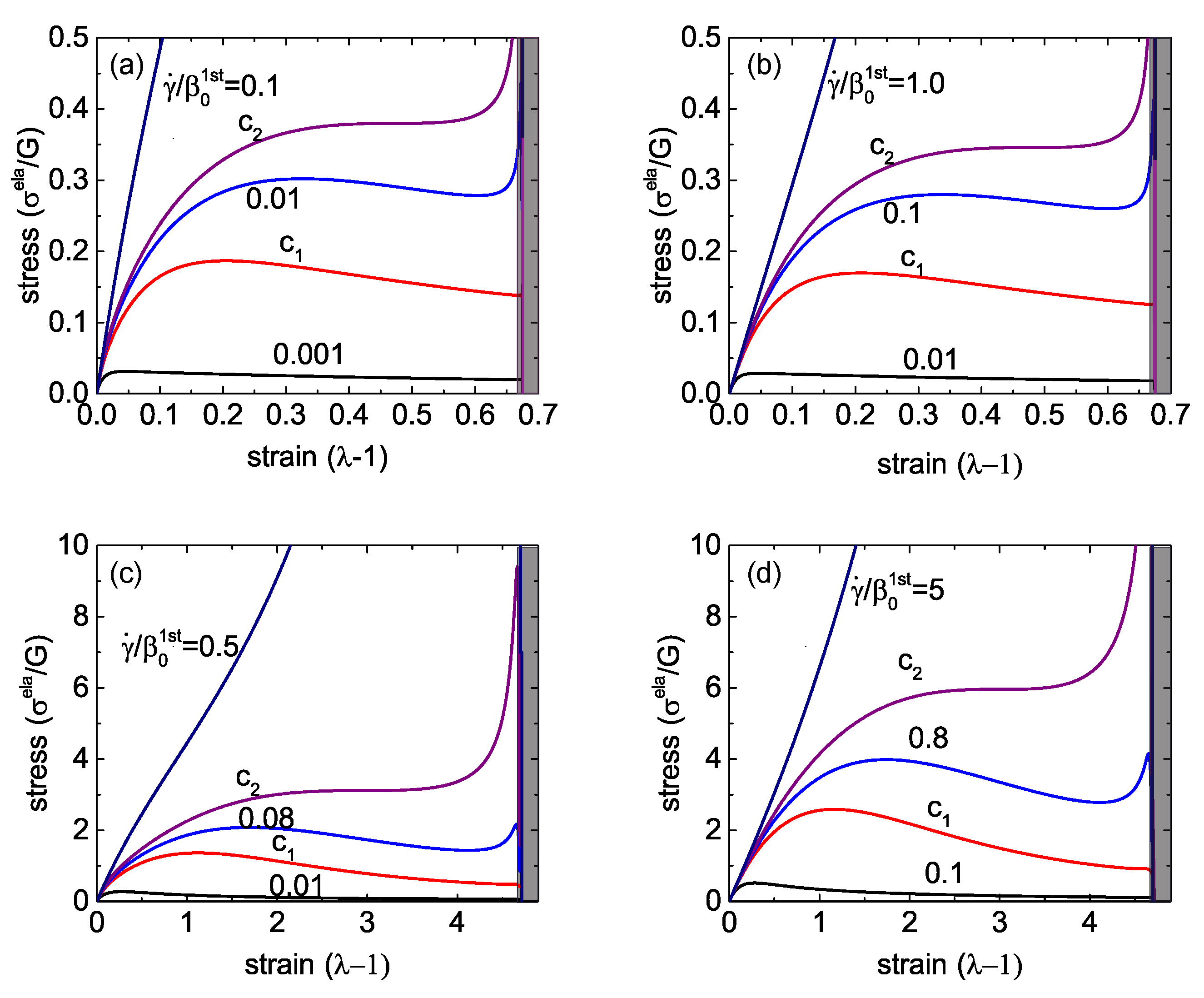
Stress-strain relationship in Equation (18) for different strain rates are shown in
Figure 3, for several distinct sets of parameters. Firstly, we consider the case where the re-crosslink rate is much higher than the spontaneous rate of breaking, e.g.,
, which means that the bond energy is greater than the barrier for attachment (
) and, in equilibrium, most of the network crosslinks are engaged. The stress-strain curves for this case are shown in
Figure 3a for
, that is, when the limit of chain extension is quite low, and in
Figure 3c for
, that is, when the elastomer network has a very large limit of extensibility (recall the definition of
, which is a fixed value defined with respect to the initial reference state of the network at
). The other pair of plots in
Figure 3 are for the case
, that is, when the crosslinks are quite easy to break and take a long time to re-connect.
Qualitatively, the constitutive relationship has the same characteristic features in all these different cases. At infinitesimally low strains, there is a linear response , where the rubber shear modulus G is the underlying parameter of the Gent model; it is used to scale the stress axis in all plots. When the strain rate of the imposed linear ramp is quite low (compared to the spontaneous rate of crosslink breaking ), we see a classic transition to the plastic-flow plateau with decreasing and the viscous stress becoming the only relevant contribution.
At a very high strain rate, the network remains strictly elastic with a monotonically growing
. Below a critical value
, which we denote
in all plots in
Figure 3, the stress-strain curve develops an “overshoot”—a yield stress point past which the slope of the curve becomes negative. This is a distinctly dynamic feature: a signature of mechanical instability in the material. For a wide range of strain rates, this instability manifests itself as breaking the sample into two coexisting domains: one with a strain value in the elastic regime, before the yield point—the other in the strongly plastic regime, at large effective extension where the stress-strain makes another sharp upturn in
on approaching the Gent limit
(in the shaded region in each plot) where the local force on each crosslink diverging near
results in all crosslinks breaking.
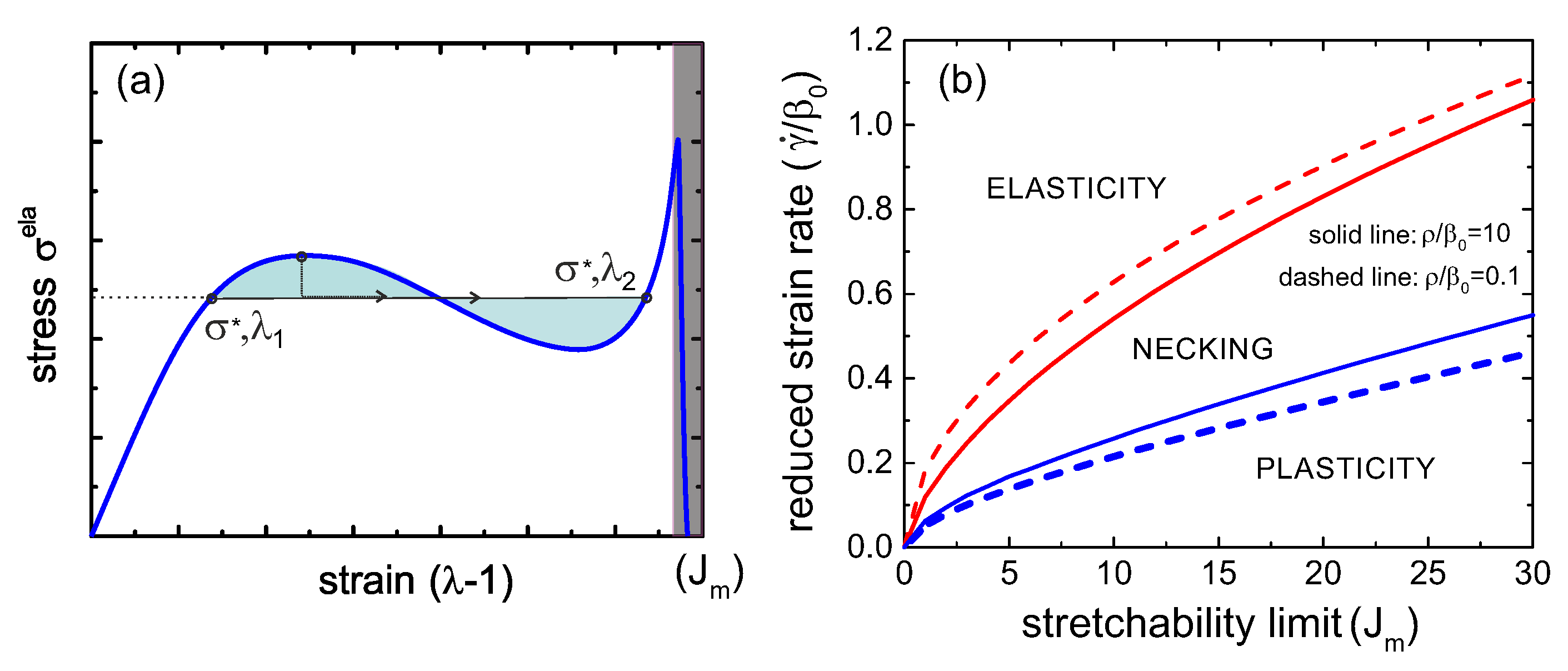
The balance of forces is the criterion to determine the tie line of this necking instability. Since the main equation in the uniaxial case, Equation (18), represents the engineering tensile stress, and the force is a product of this stress and the initial (un-distorted) cross-section area, the equality of forces means the equality of engineering stress (the balance, and the tie line, will look a bit different in the true stress representation). Hence, the tie line is horizontal, connecting the points
and
, see
Figure 4a for illustration. If we employ the quasi-equilibrium condition for coexistence of the two regions,
i.e., the equality of the Gibbs free energy density
, then the connection
shows that the condition of equal areas determines the position of the tie line
.
However, since we are considering a dynamically increasing strain, the actual transition will be determined by the energy barriers. The lower bound (for smallest energy barrier, which is essentially determined by the energy of interface between
and
regions) is the tie line itself. That is, on increasing the strain (at a fixed rate
) the sample reaches the point
, and the infinitesimal region of
emerges, coexisting with
. The fraction of
will increase according to the linear superposition
until the point
is reached along the tie line, after which the sample will return to the homogeneous highly stretched state. The upper bound (for significant energy barriers) will be when the samples ‘overshoots’ the point
and reaches the upper limit of stability, where the negative slope of
first appears. Then, the sample will have a discontinuous jump to a finite fraction of the highly-stretched
region along the tie line. The highest shear rate at which this instability is possible is labelled
in
Figure 3. Meanwhile, the lower limit of stability of the coexistence (necking) regime is the curve marked
in
Figure 3, where the upturn of the
relationship starts at large deformation. The reason for this upturn is that there are more crosslinked chains surviving from the beginning for larger strain rates, and they contribute to the rapid increase of the total stress when these chains experience the hyper-nonlinear region of the Gent model on
approaching its limit
. At strain rates below
, the stress monotonically decreases at high strains.
Stress turnovers can disappear at too-low and too-high strain rates.
Figure 4b gives a “phase diagram” of the process as a map in the space of
parameters, marking the regions of pure elasticity, of pure plastic flow above the yield stress, and of the two-phase necking regime. Curiously, we see again (as in
Figure 3) that, in spite of a very different appearance of networks with high and low rates of re-crosslinking, the actual difference in their behavior is quite minor. The critical values of the strain rate,
and
, both increase with the stretchability limit of the network
, eventually becoming linear at large
. This means that a transient network with no finite-extensibility limit (
) is always in the plastic regime above the yield stress.
4. Dual Transient Network
Dual networks become more and more relevant in various areas of science and engineering. In biological networks, this is the key mechanism to achieve the required mechanical characteristics: in the cytoskeleton, the actin filament network is embedded in the weak intermediate filament gel, and in the extracellular matrix and connective tissue, one always finds a stiffer (usually collagen) network embedded in a much weaker gel of elastin, fibronectin, or another flexible protein [
39]. In synthetic elastomers, the dual interpenetrating network concept is very widely spread due to the remarkable mechanical properties and the resilience of the material [
40].
We now consider a case of dual transient network, as an extension of the earlier general analysis. Two different kinds of elastomeric networks penetrating each other share the common affine deformation and add the forces generated in response; we shall denote the variables of each network by their superscript: 1
st or 2
nd. The Helmholtz free energy density of the system is the sum of the contributions from each network, and the corresponding Gibbs free energy density follows:
Then, the engineering elastic stress can be obtained from Equation (
13), which can also be expressed as a sum of the two contributions,
(since the Lagrange multiplier could be split between the two parts, as in the partial pressure).
Although it is not necessary, let us consider the basic rubber elasticity of the two networks to be the same (the same rubber modulus
G), since our main interest is in understanding the dynamics of the response. Similarly, for understanding qualitative features of network dynamics, let us assume that both components of the dual system have the same limit of the stretchability
. We consider the difference between the two networks to be in the microscopic dynamics of their crosslinks: the crosslink breakage rates. One can easily adapt the general theoretical model for any specific system by using Equation (20), and the particular parameters of each individual network as given explicitly in the previous section. Note that since we are considering the imposed strain (rather than stress), the local force applied to each individual crosslink remains the same, as given by Equation (
9), irrespective of whether the other component network is breaking or not.
The two different breaking rates of the component networks are and , each modified by the additional exponential factor with the local pulling force. If one breakage rate is much smaller than the other, that component can be regarded as permanent elastic network.
Similar to the case of a single transient network, here we will discuss the responses of a dual network to a uniaxial stretch by a fixed factor λ in the form of the linear ramp deformation
. As in the plots in
Figure 3 and
Figure 4b, we scale the time in the units of
. Two important physical variables determine the stress-strain relationship of a dual network: the reduced strain rate,
, and the reduced breakage rate of the crosslinks of the second network at its force free state,
.
Figure 5 shows the three deformation regimes of plasticity, elasticity and necking, similar to the single transient network discussion earlier. If the stretchability limit of the material is small, say
in
Figure 5a,b, the critical values of the reduced strain rate,
and
, scale in proportion to the ratio
. Only two cases of this ratio =0.1 and =1 are shown, but the relation holds in general, as the 3D phase diagram in
Figure 6 demonstrates. This indicates that the macroscopic response, or specifically—the boundaries of three characteristic regimes of a dual network—is mainly determined by the more permanent (or less breakable) component. Note that, since we add the two stress components, there is an inherent symmetry,
i.e., if the ratio
becomes greater than 1, then the
network becomes “more permanent” and then it determines the phase boundaries.
The plots in
Figure 5c,d compare with the case of a much less restricted network: the limit of stretchability
. The critical values
and
of the reduced strain rate
increase with the stretchability limit of the material, similar to what we observed in a single transient network, while the proportionality to the rates ration remains valid.
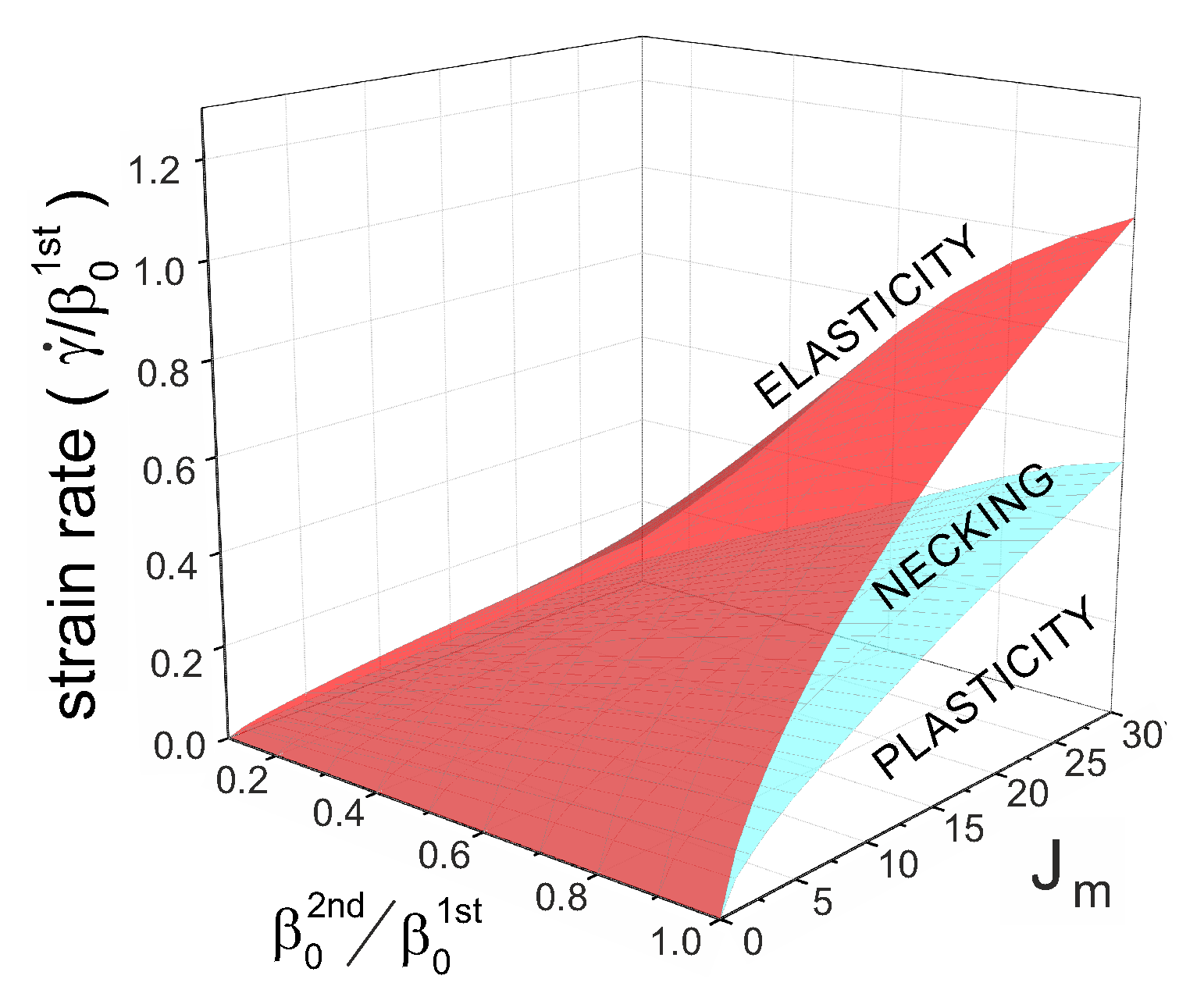
Figure 6 shows a ‘phase diagram’ of the regions of elasticity, necking and plastic flow, exploring the effects of stretchability limit
, the bare rates ratio
, and the rate of strain. Note that the plane of
is the case of the second network component remaining permanent—and we see in
Figure 6 that the dual network will remain elastic at all rates of strain. This is in contrast to the earlier work [
29], which is because the authors there assumed that the proportion of the second permanent network is
, so it has small effect and still allows for necking—whereas we have considered the symmetric case of two networks in equal proportion, and find that the elasticity prevails when one of the networks is unbreakable. Similarly, the plane
is the case of single transient network we discussed earlier, and the cross-section in this plane is our old
Figure 4b. We have already discussed in the context of a single network, that at large
(that is, when Gent model reduces to the classical rubber elasticity) both phase boundaries depend linearly on
, and this remains the case in the dual network.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}