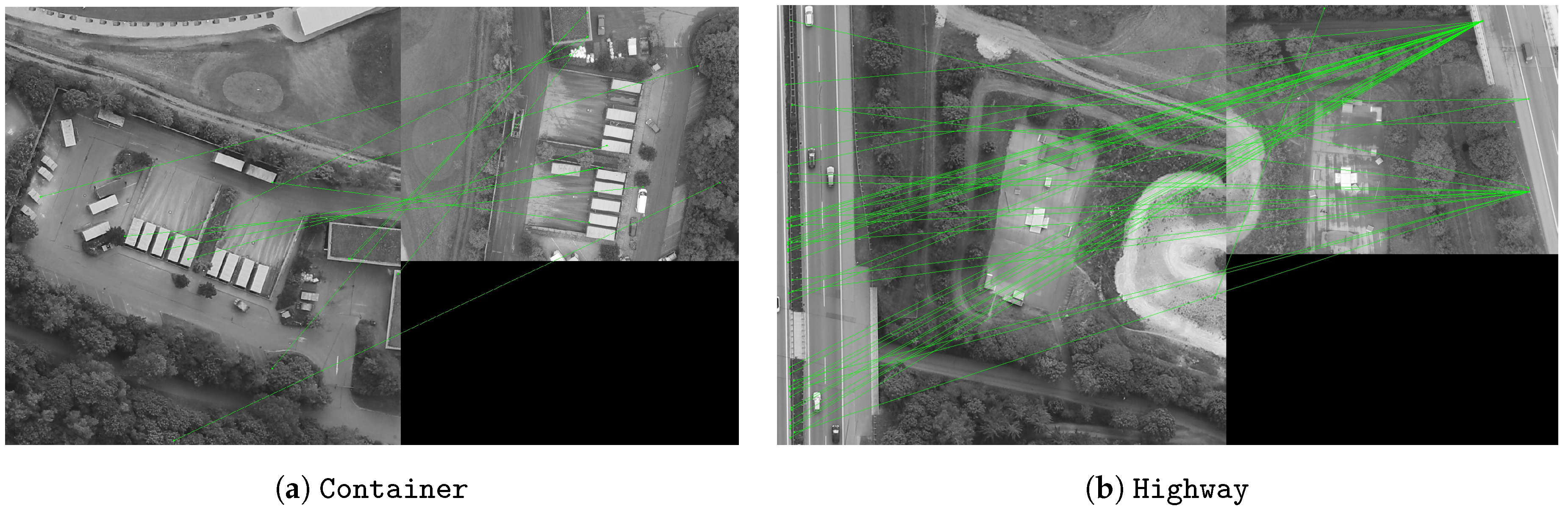
Figure 1.
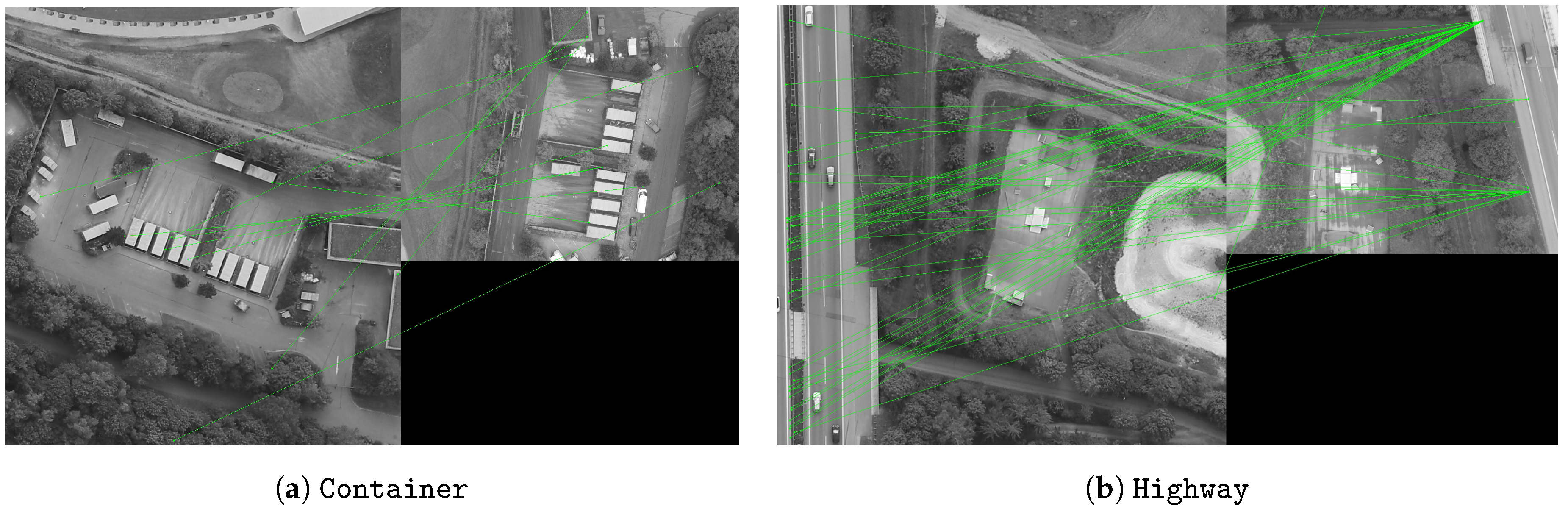
Typical cases from the datasets (a) Container and (b) Highway showing the results of matching UAV and aerial images using SIFT, where the left of the subfigure is a downsampled UAV image and the right is a cropped aerial image. Green lines indicate the matches detected by SIFT; almost all of them are wrong.
Figure 1.
Typical cases from the datasets (a) Container and (b) Highway showing the results of matching UAV and aerial images using SIFT, where the left of the subfigure is a downsampled UAV image and the right is a cropped aerial image. Green lines indicate the matches detected by SIFT; almost all of them are wrong.
Figure 2.
Datasets used in this paper: each column represents one (pre-processed) aerial reference image and two UAV target images. The UAV image in (d) should be matched to the aerial image (top right) and to a cropped part of a Google Maps image (h). (a) Container; (b) Urban1; (c) Pool1; (d) Building; (e) Highway; (f) Urban2; (g) Pool2; (h) Googlemaps.
Figure 2.
Datasets used in this paper: each column represents one (pre-processed) aerial reference image and two UAV target images. The UAV image in (d) should be matched to the aerial image (top right) and to a cropped part of a Google Maps image (h). (a) Container; (b) Urban1; (c) Pool1; (d) Building; (e) Highway; (f) Urban2; (g) Pool2; (h) Googlemaps.
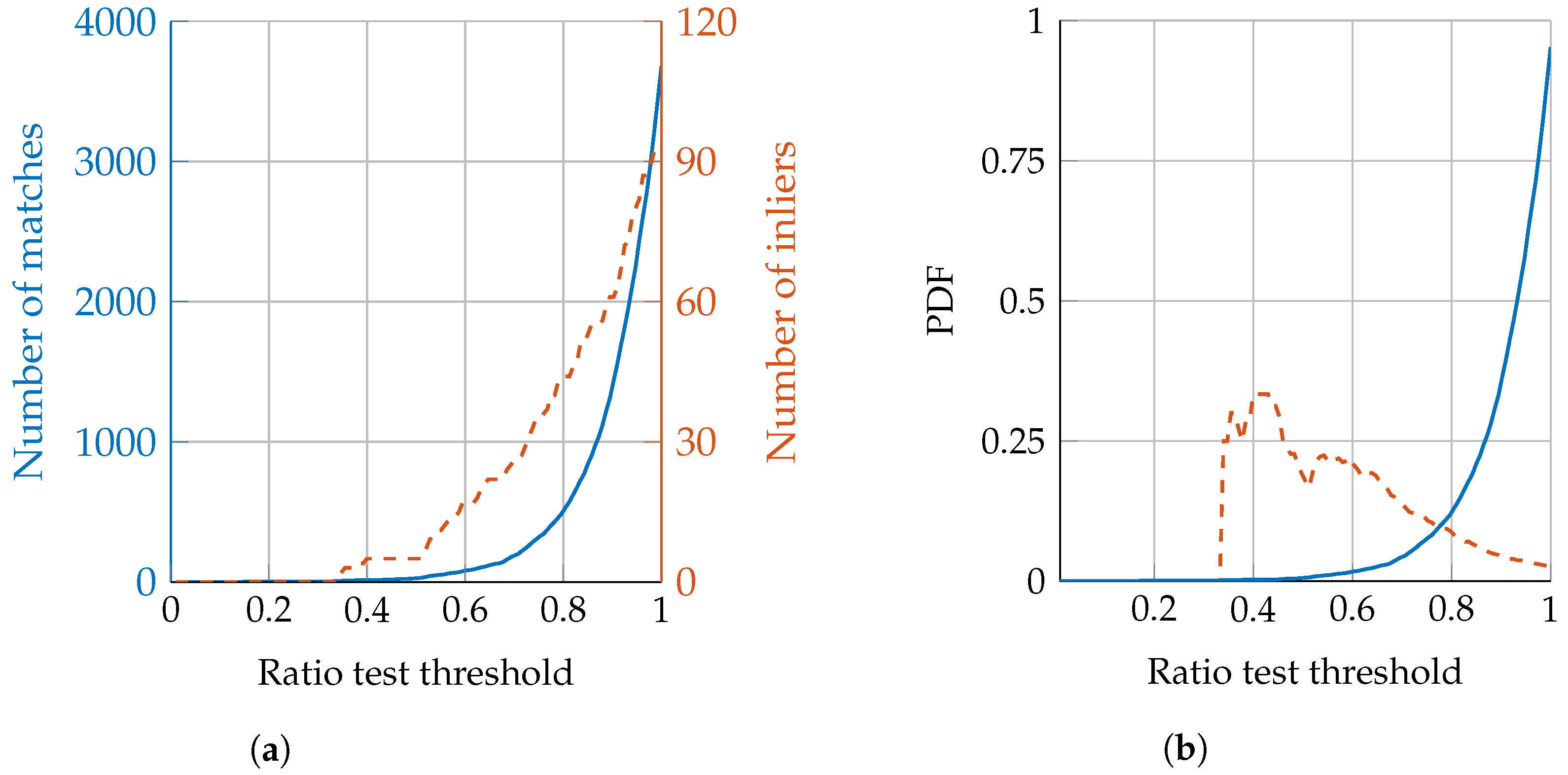
Figure 3.
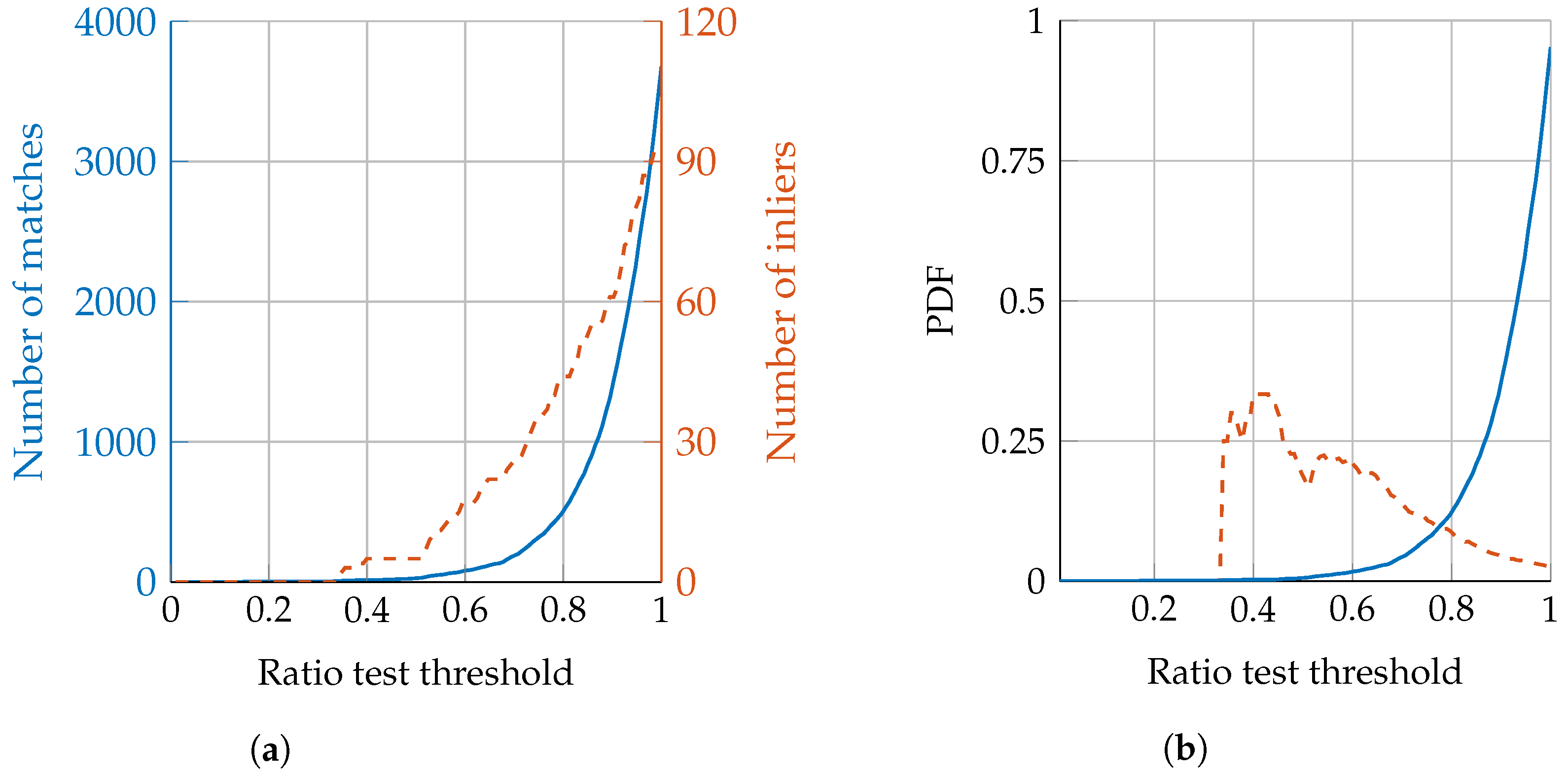
Influence of different ratio test thresholds for the Container dataset. (a) Number of remaining matches after applying the ratio test (solid) and the number of correct matches among them (dashed); (b) ratio of correct (dashed) and incorrect (solid) matches.
Figure 3.
Influence of different ratio test thresholds for the Container dataset. (a) Number of remaining matches after applying the ratio test (solid) and the number of correct matches among them (dashed); (b) ratio of correct (dashed) and incorrect (solid) matches.
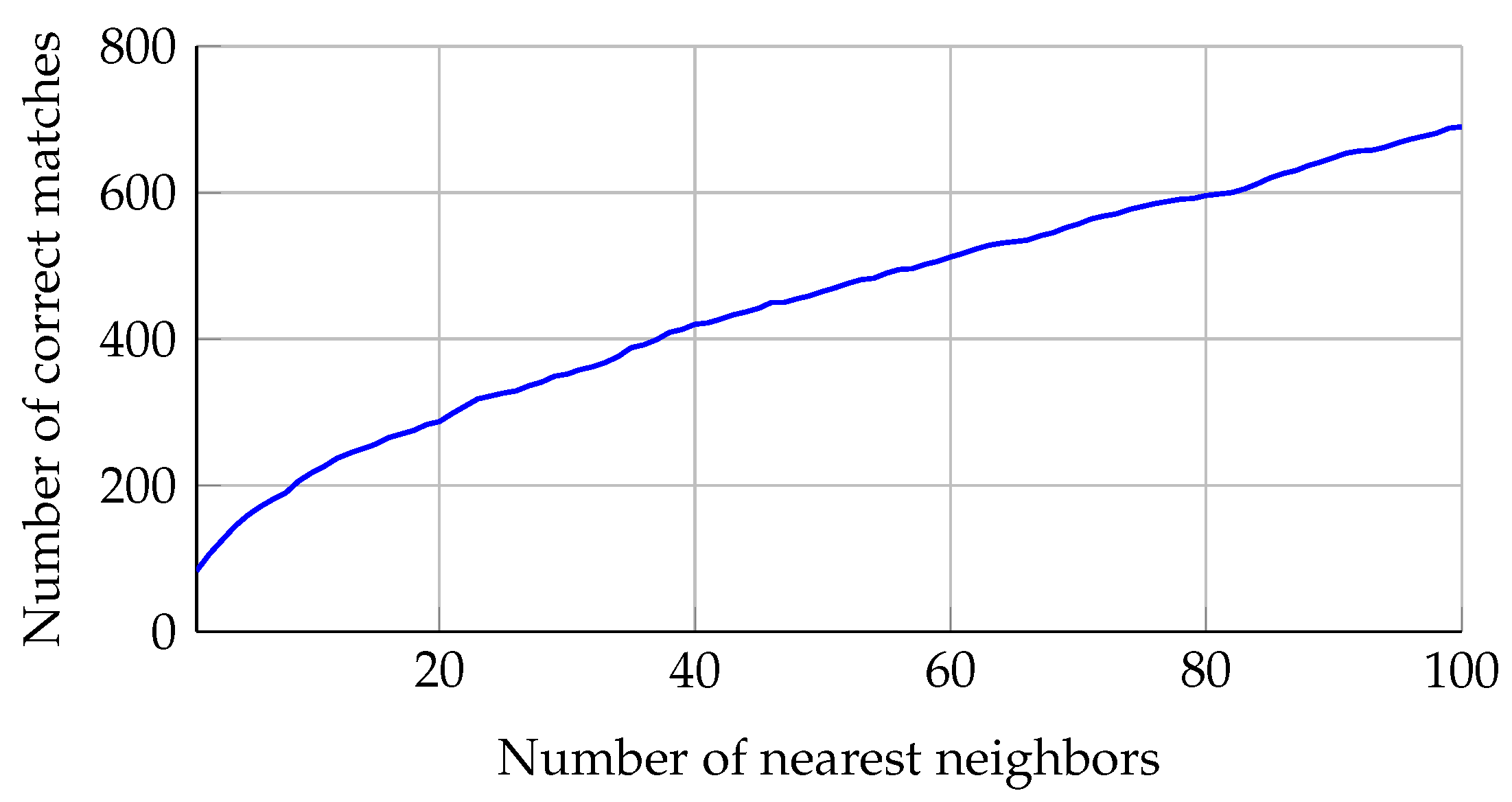
Figure 4.
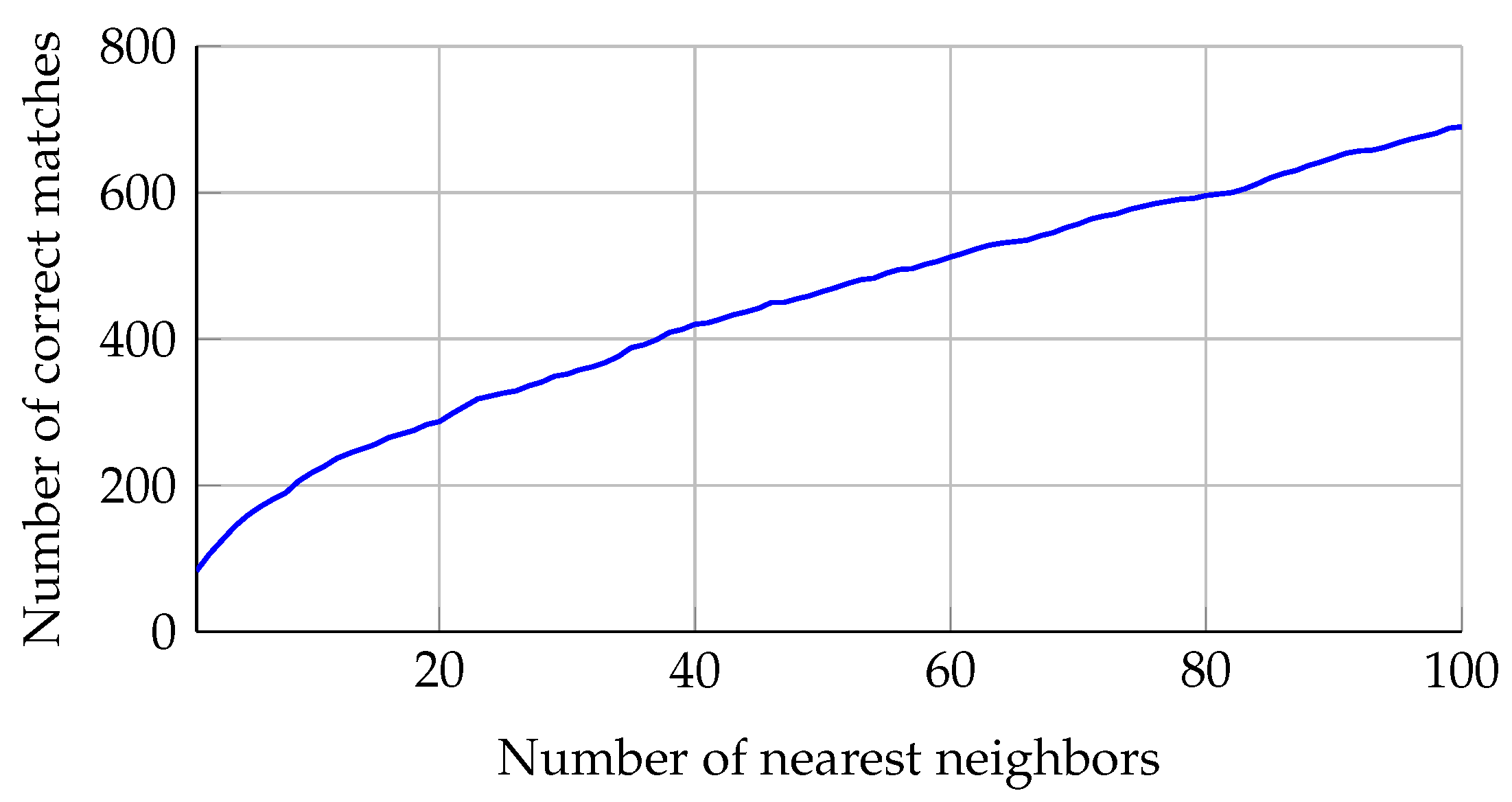
Cumulative number of possible correct matches considering multiple nearest neighbors in the feature matching for the Container dataset.
Figure 4.
Cumulative number of possible correct matches considering multiple nearest neighbors in the feature matching for the Container dataset.
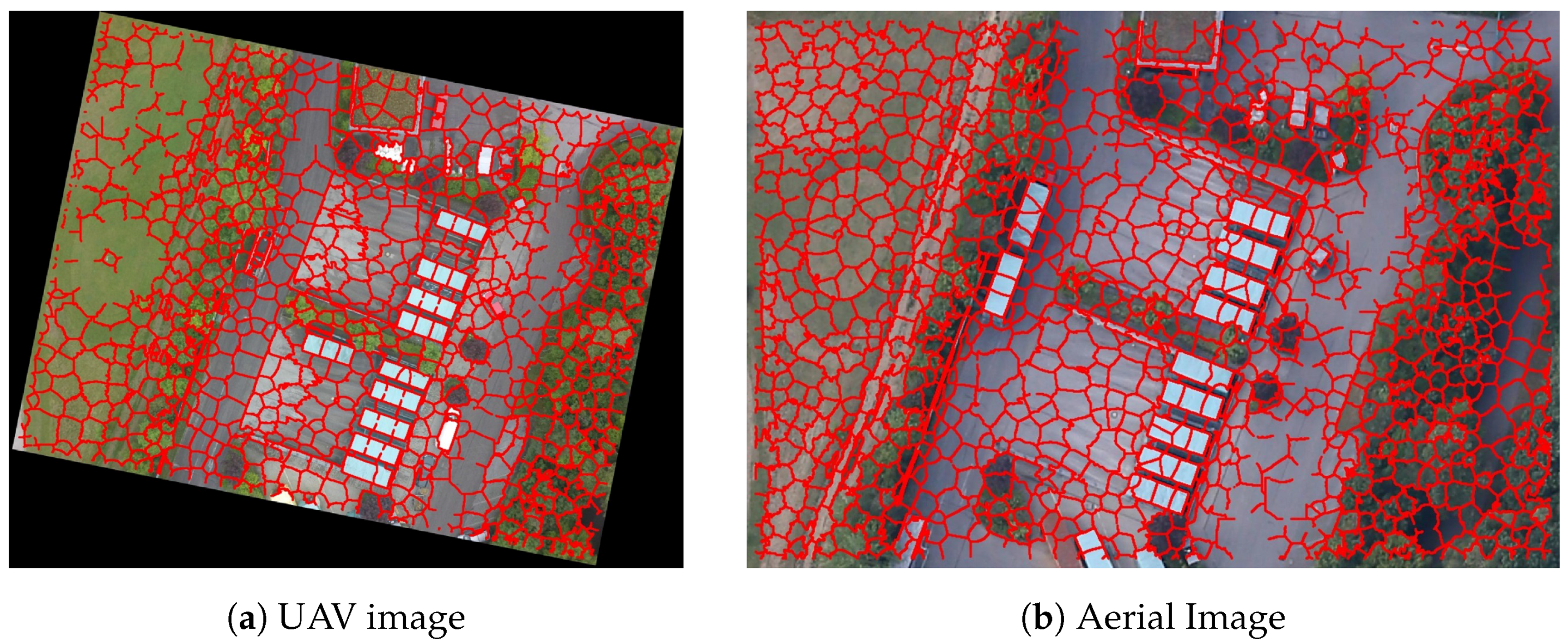
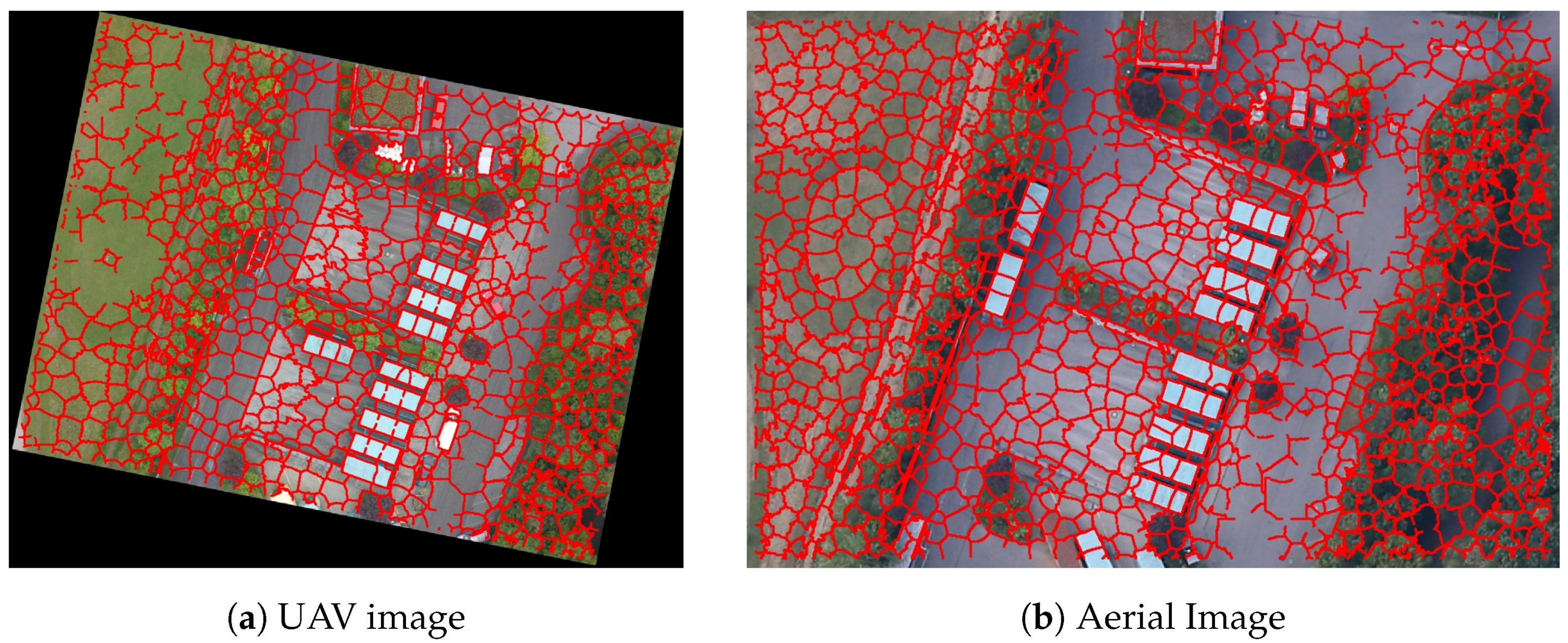
Figure 5.
Feature points highlighted in red, namely all of the pixels at the boundaries of superpixels, after removing those feature points located at homogeneous areas for (a) the pre-aligned UAV image and (b) the aerial image of the Container dataset with 1000 simple linear iterative clustering (SLIC) superpixels.
Figure 5.
Feature points highlighted in red, namely all of the pixels at the boundaries of superpixels, after removing those feature points located at homogeneous areas for (a) the pre-aligned UAV image and (b) the aerial image of the Container dataset with 1000 simple linear iterative clustering (SLIC) superpixels.
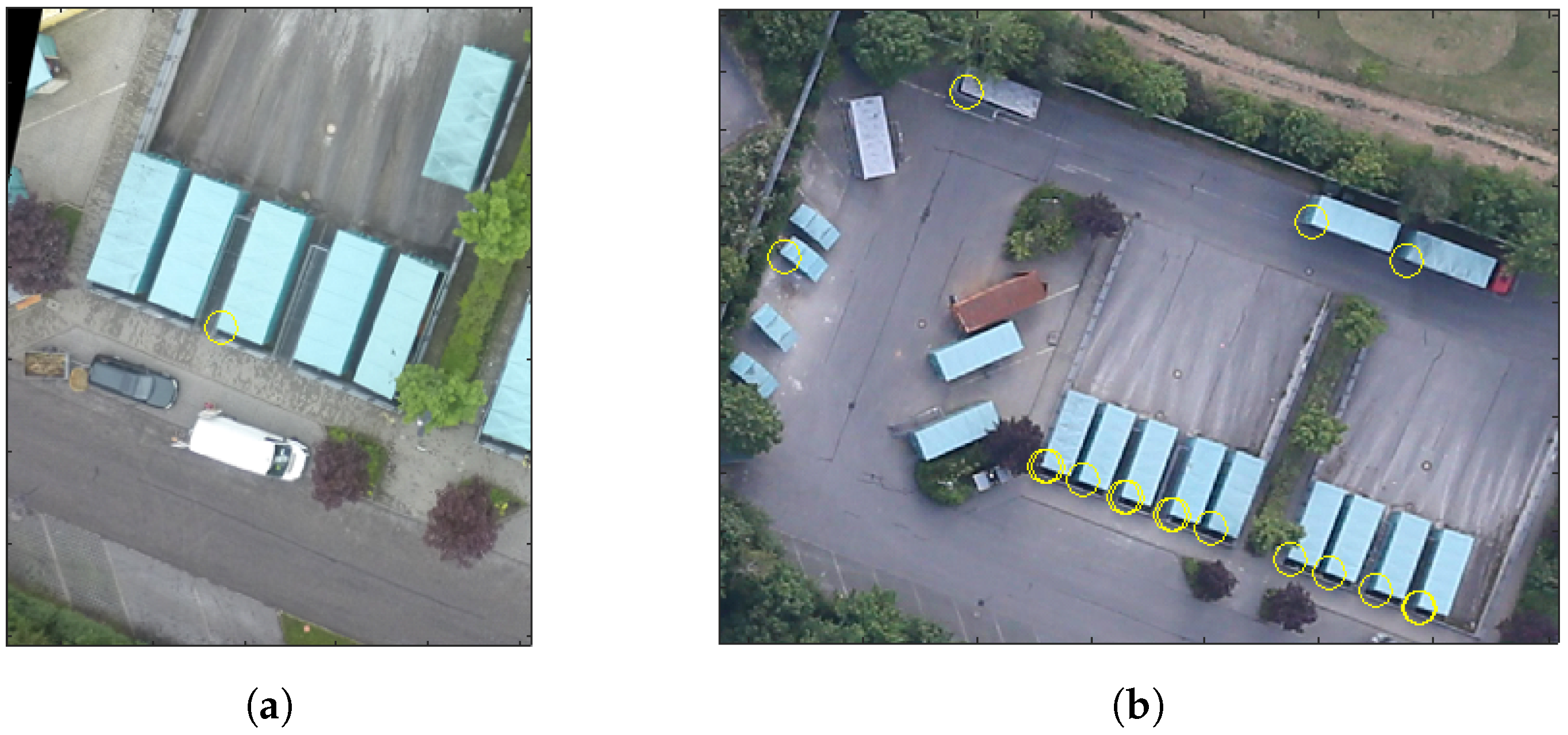
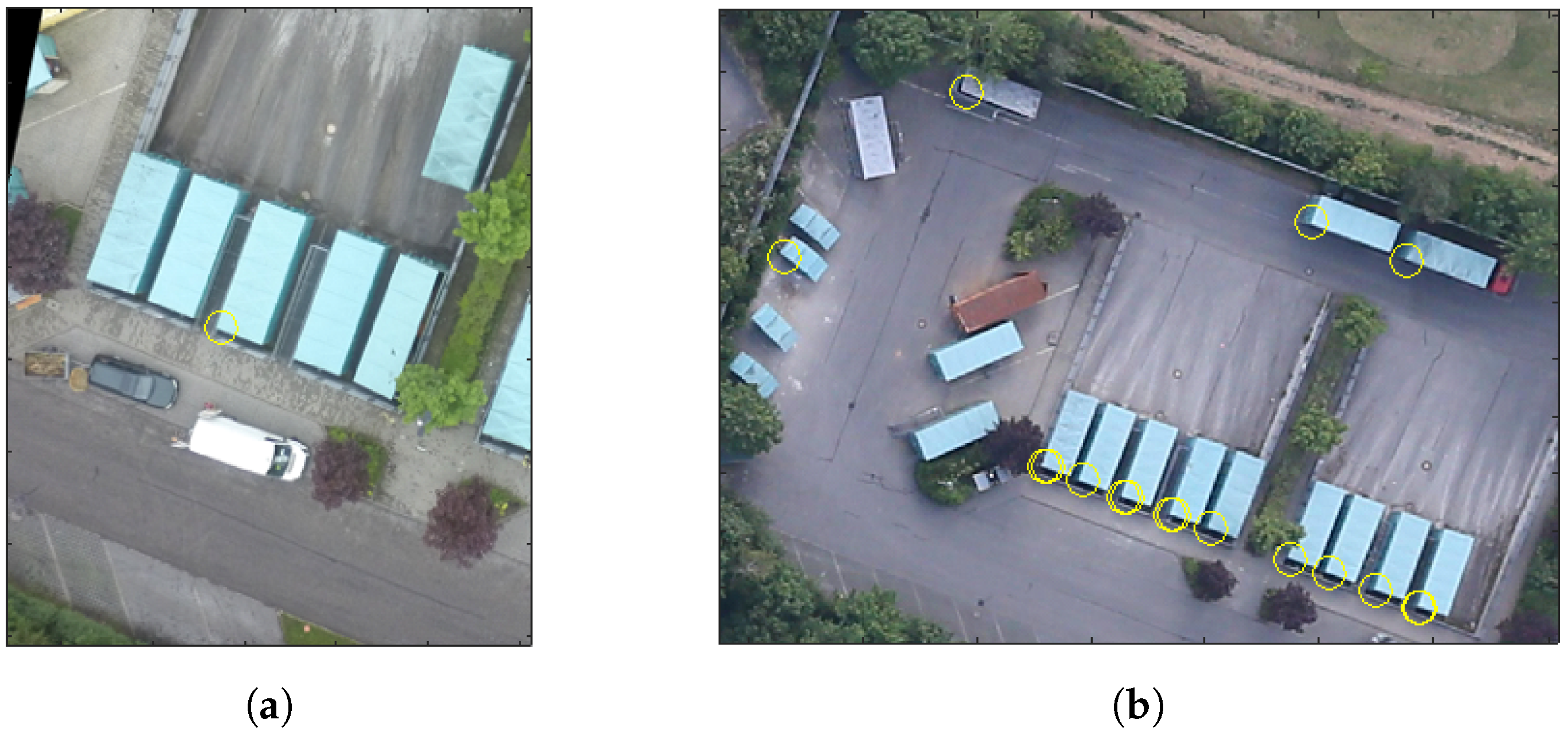
Figure 6.
Challenge of ambiguous feature matching. One feature point at a corner of a container in the UAV image (a) corresponds to many feature points in the aerial image with similar descriptors (b). The correct match often can be found among a set of multiple nearest neighbors. These ambiguities need to be solved in order to extract the correct match.
Figure 6.
Challenge of ambiguous feature matching. One feature point at a corner of a container in the UAV image (a) corresponds to many feature points in the aerial image with similar descriptors (b). The correct match often can be found among a set of multiple nearest neighbors. These ambiguities need to be solved in order to extract the correct match.
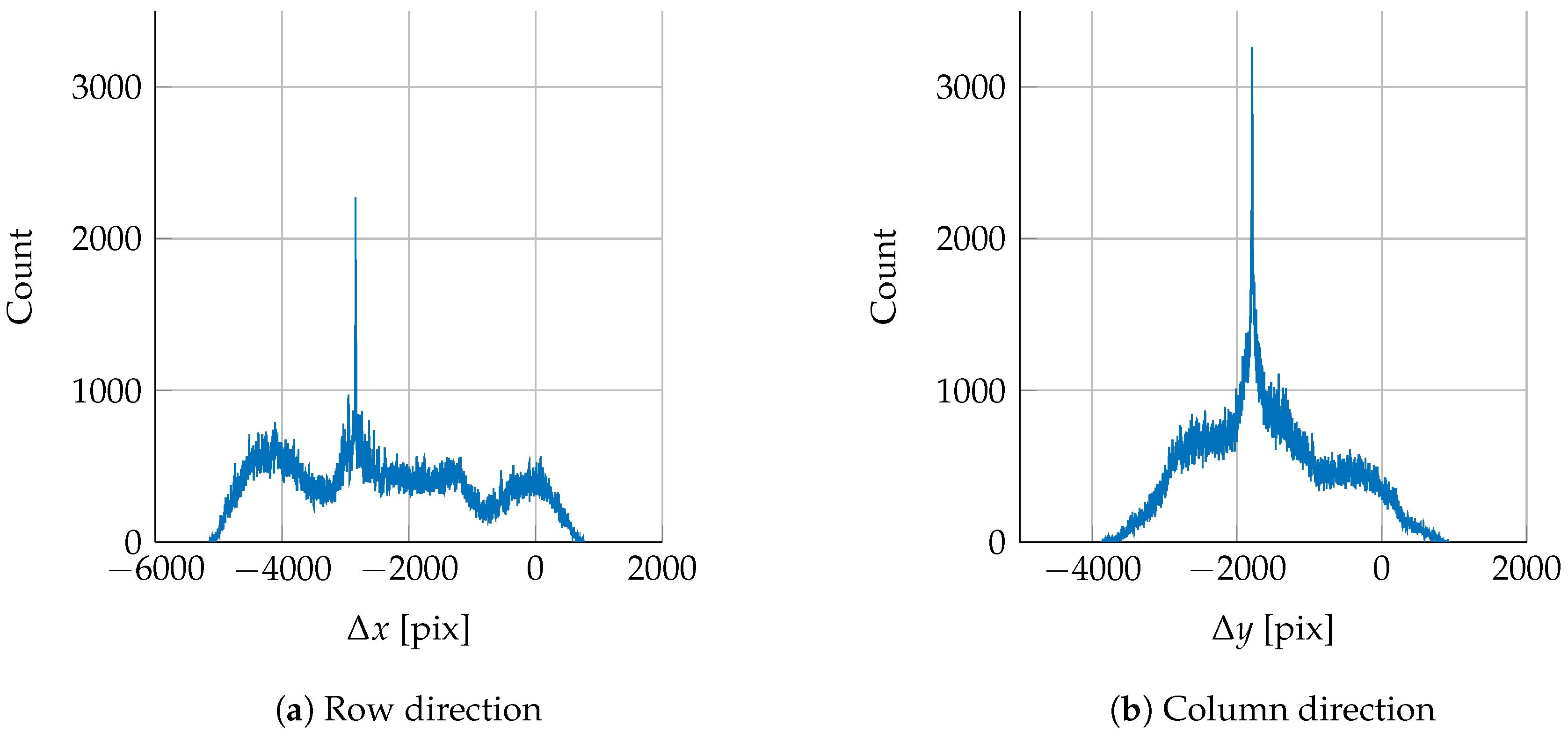
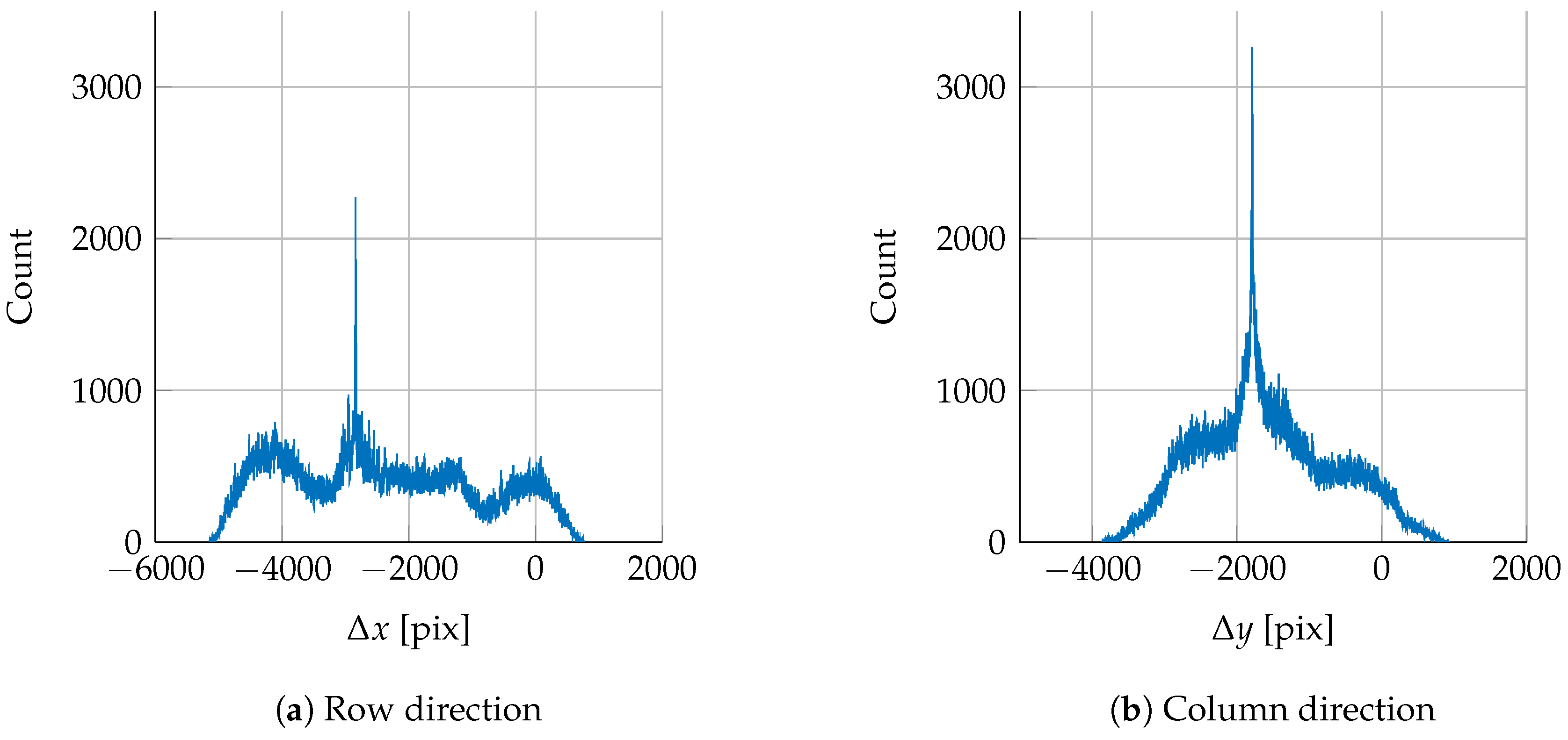
Figure 7.
Geometric match verification of the Container scenario with histogram voting. Distribution of pixel distances for all putative matches according to the one-to-many matching in the (a) row and (b) column direction. Distinct peaks represent unknown 2D-translation.
Figure 7.
Geometric match verification of the Container scenario with histogram voting. Distribution of pixel distances for all putative matches according to the one-to-many matching in the (a) row and (b) column direction. Distinct peaks represent unknown 2D-translation.
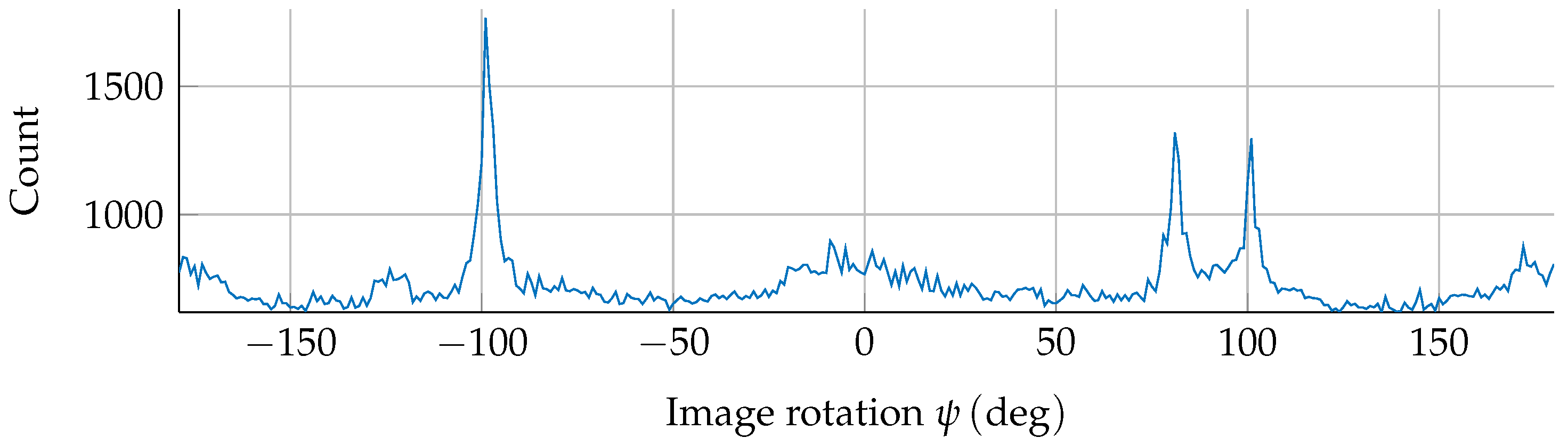
Figure 8.
Recovering the unknown image rotation in the case of unavailable or inaccurate UAV IMU data. Extending the proposed method by transforming UAV feature points with multiple rotation values before the histogram voting step. The figure shows the rotation histogram for the Container dataset. The maximum number of raw matches represents unknown image rotation.
Figure 8.
Recovering the unknown image rotation in the case of unavailable or inaccurate UAV IMU data. Extending the proposed method by transforming UAV feature points with multiple rotation values before the histogram voting step. The figure shows the rotation histogram for the Container dataset. The maximum number of raw matches represents unknown image rotation.
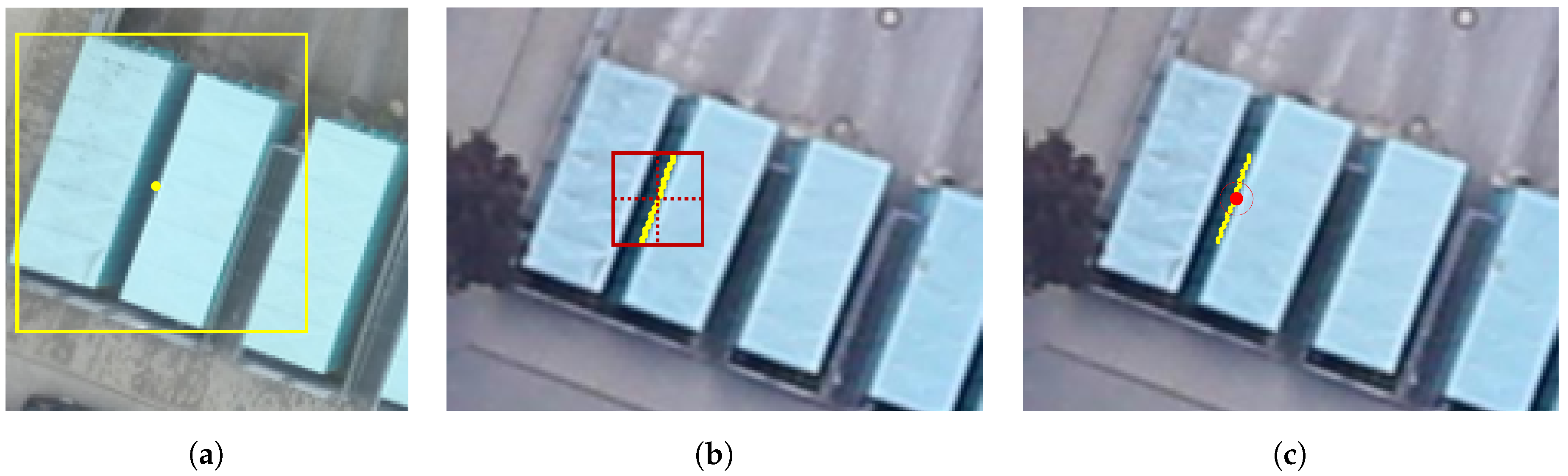
Figure 9.
Refinement and duplicate elimination of geometric correct matches. (a) One feature point in the UAV image (yellow dot) and its template size (rectangle); (b) corresponding geometric inliers (yellow dots) in the aerial image and size of the search window for one match (red rectangle); (c) all geometric inliers will share the same optimized pixel location after refinement (red dot).
Figure 9.
Refinement and duplicate elimination of geometric correct matches. (a) One feature point in the UAV image (yellow dot) and its template size (rectangle); (b) corresponding geometric inliers (yellow dots) in the aerial image and size of the search window for one match (red rectangle); (c) all geometric inliers will share the same optimized pixel location after refinement (red dot).
Figure 10.
Additional datasets for the experiment. Top: reference images. Bottom: target images. Overlapping areas are highlighted by yellow rectangles in the reference images. (a) WV2; (b) Eichenau; (c) EOC.
Figure 10.
Additional datasets for the experiment. Top: reference images. Bottom: target images. Overlapping areas are highlighted by yellow rectangles in the reference images. (a) WV2; (b) Eichenau; (c) EOC.
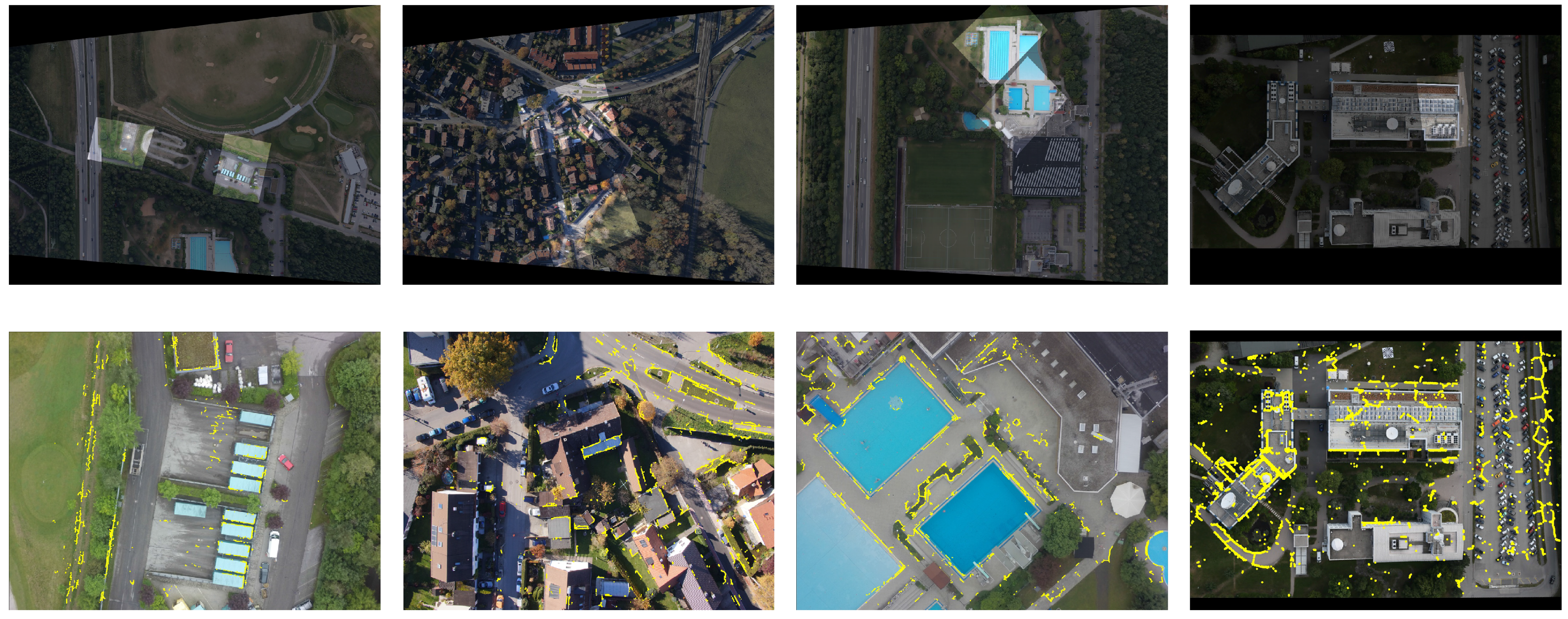
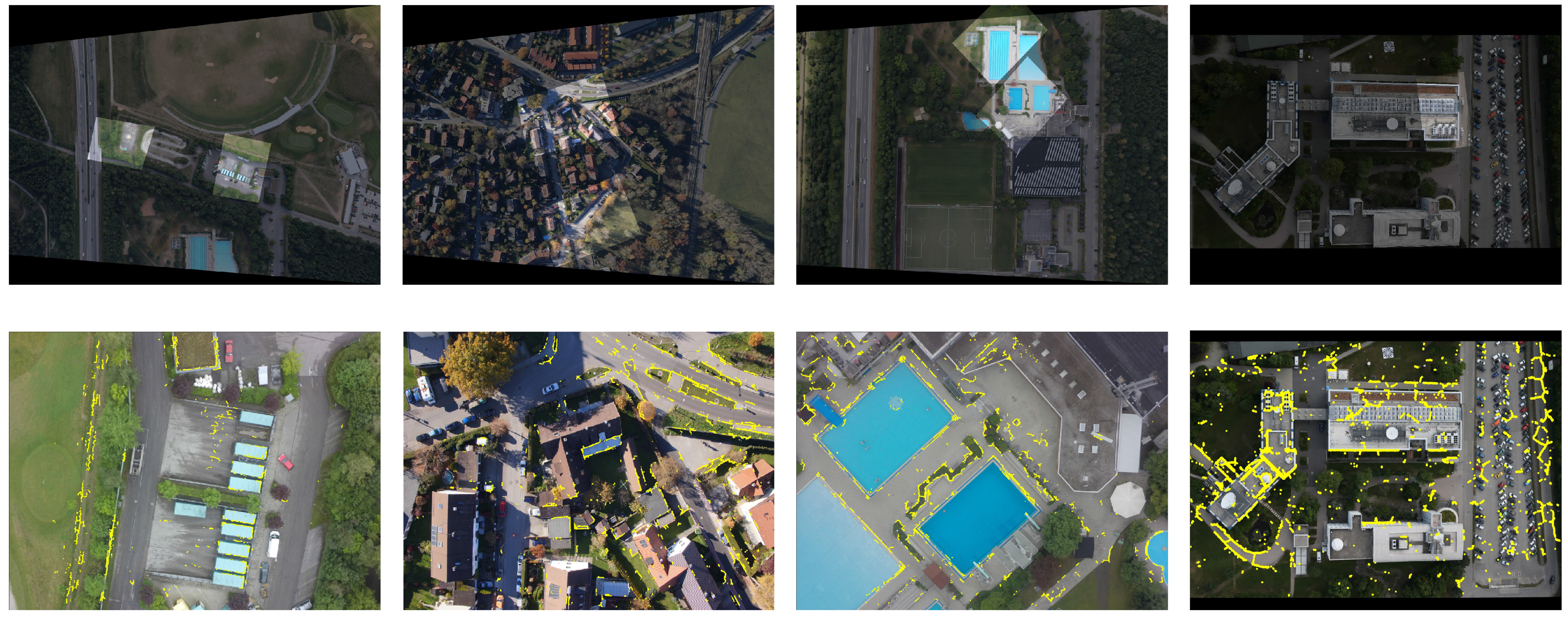
Figure 11.
Qualitative results of the proposed matching method according to the image pairs in
Figure 2. The first row shows the overlapped UAV and aerial image pairs after applying an estimated homography calculated from our matches (also for the figure on the bottom right). The second and third row show the distribution of the geometrically-correct matches in the UAV images (yellow dots).
Figure 11.
Qualitative results of the proposed matching method according to the image pairs in
Figure 2. The first row shows the overlapped UAV and aerial image pairs after applying an estimated homography calculated from our matches (also for the figure on the bottom right). The second and third row show the distribution of the geometrically-correct matches in the UAV images (yellow dots).
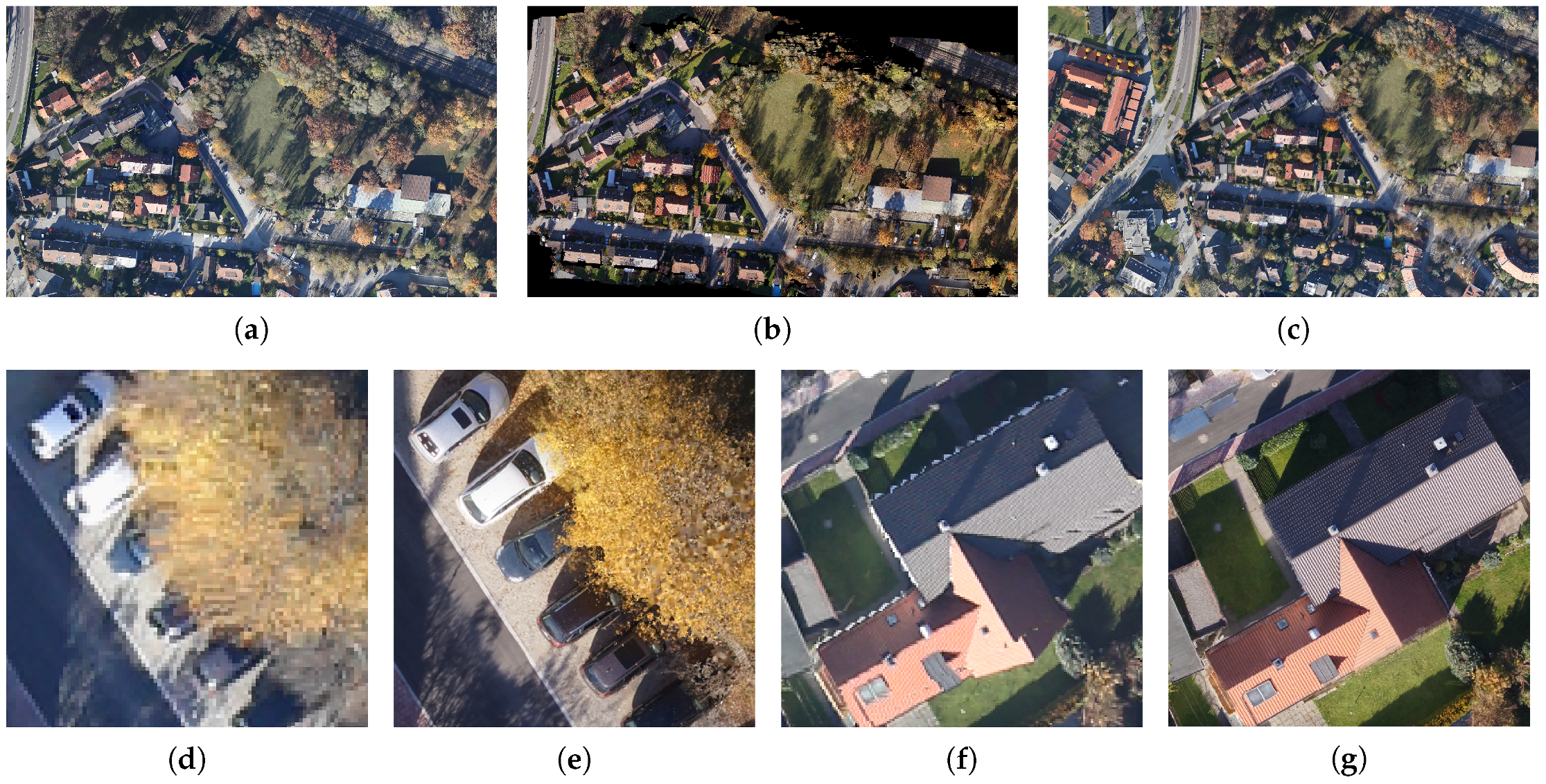
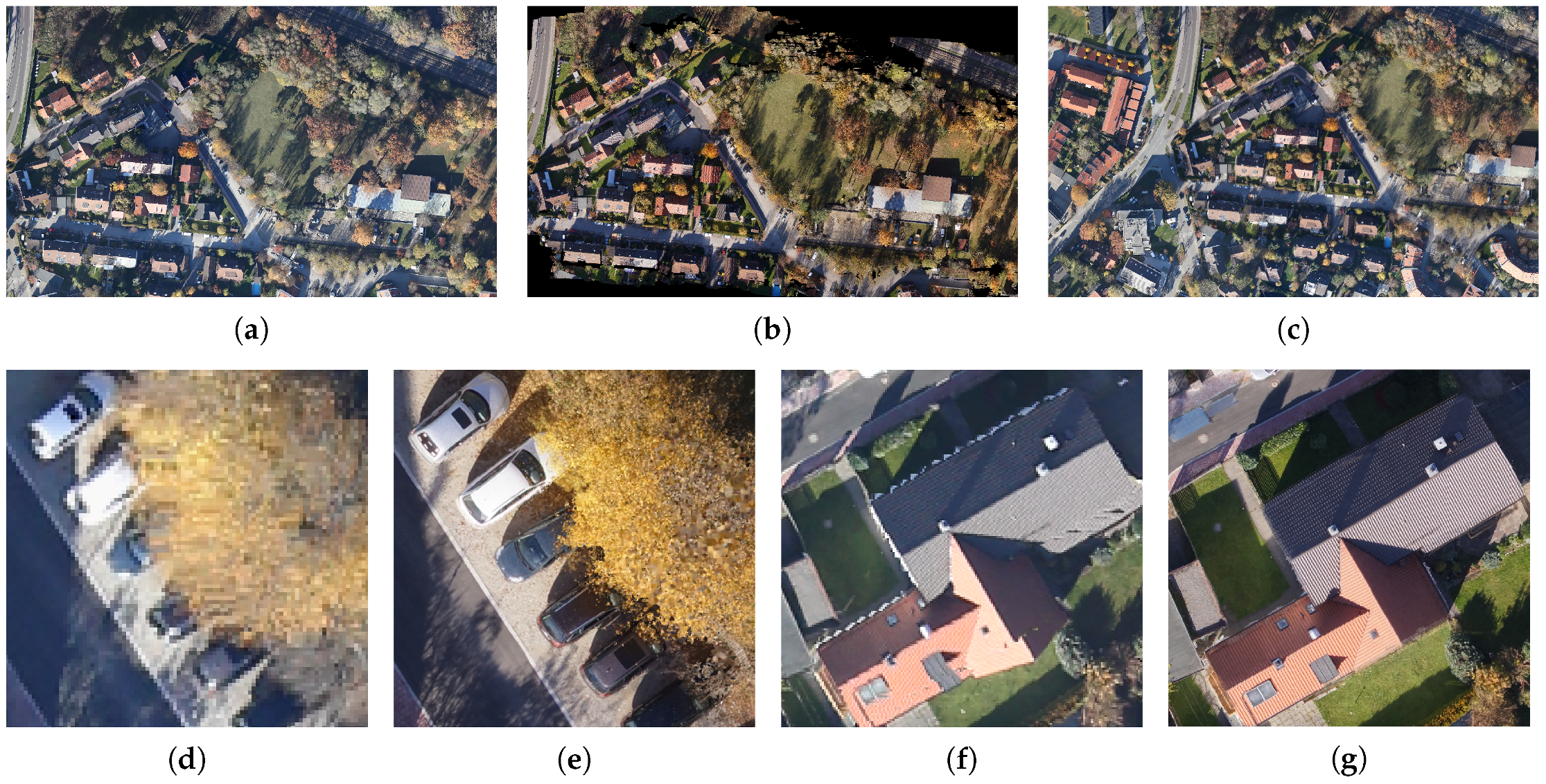
Figure 12.
Comparison of (a) the aerial orthophoto with 20 cm GSD and (b) the UAV orthophoto with 2 cm GSD of the Eichenau dataset; (c) 50% transparent overlap of both orthophotos; (d,e) compare cars and (f,g) show a roof on the aerial and UAV orthophoto, respectively.
Figure 12.
Comparison of (a) the aerial orthophoto with 20 cm GSD and (b) the UAV orthophoto with 2 cm GSD of the Eichenau dataset; (c) 50% transparent overlap of both orthophotos; (d,e) compare cars and (f,g) show a roof on the aerial and UAV orthophoto, respectively.
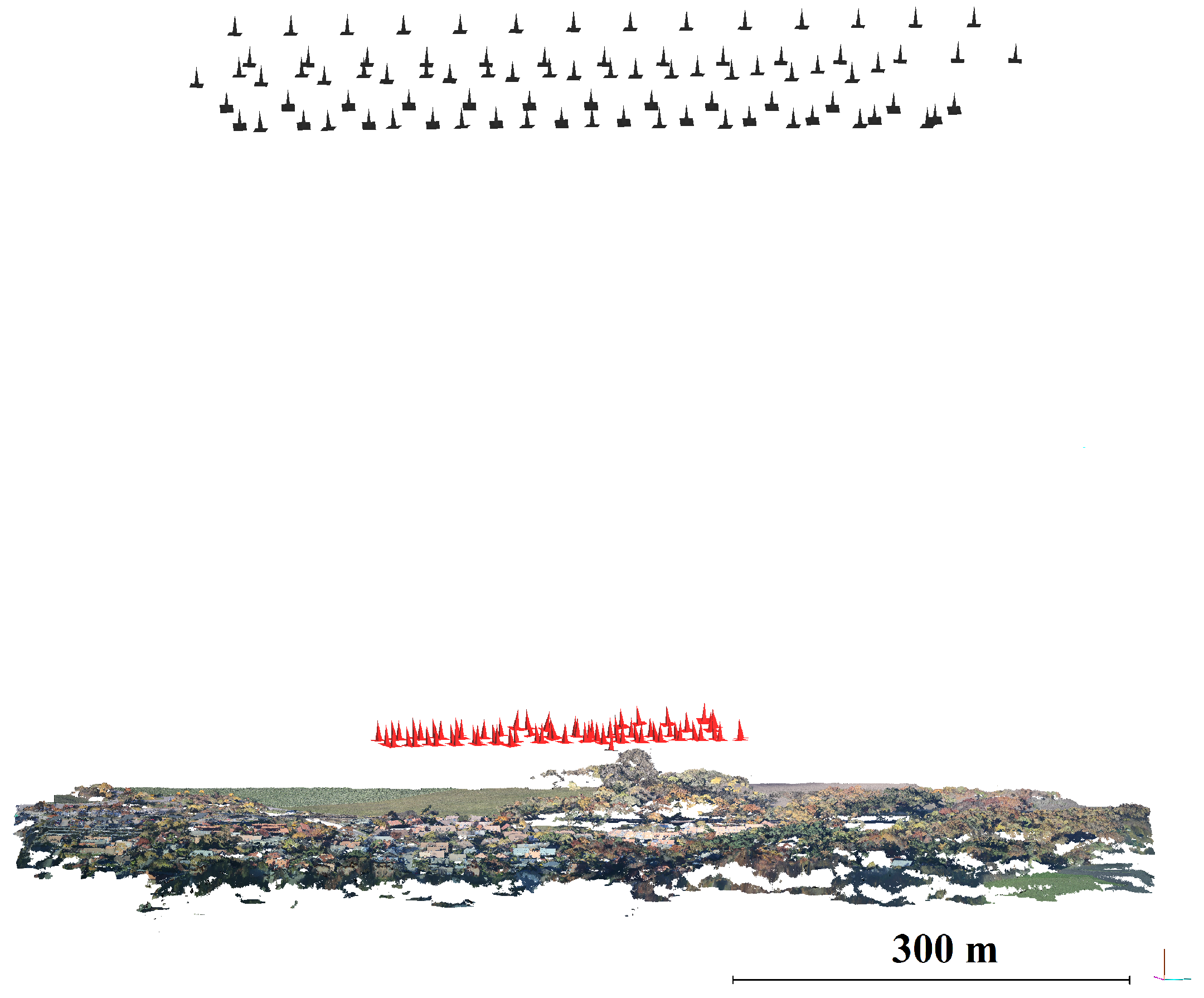
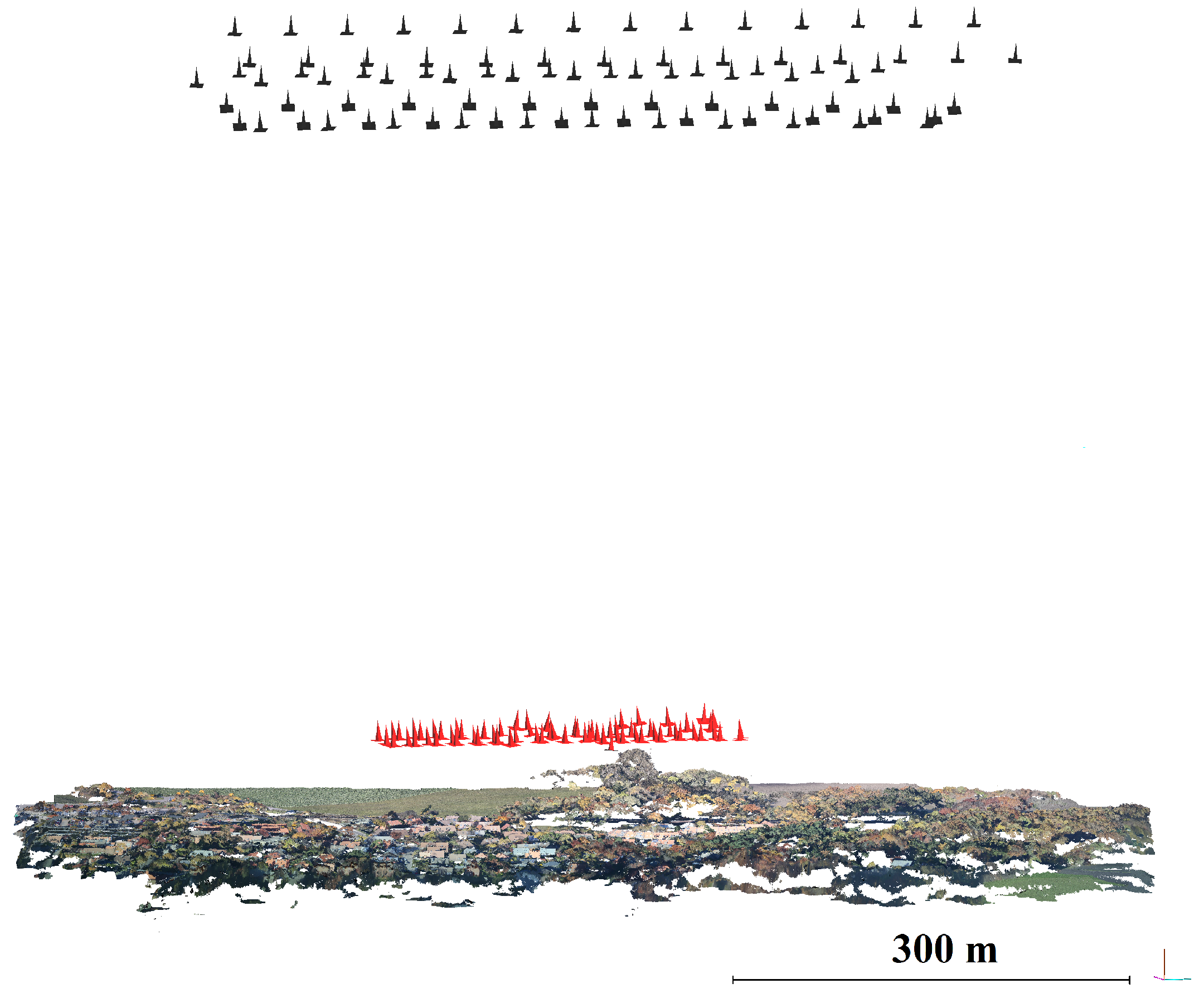
Figure 13.
Camera pose visualization for the Eichenau dataset, showing camera poses of the geo-registered UAV image block at a 100-m altitude (red) and the aerial image block at a 600-m altitude (black).
Figure 13.
Camera pose visualization for the Eichenau dataset, showing camera poses of the geo-registered UAV image block at a 100-m altitude (red) and the aerial image block at a 600-m altitude (black).
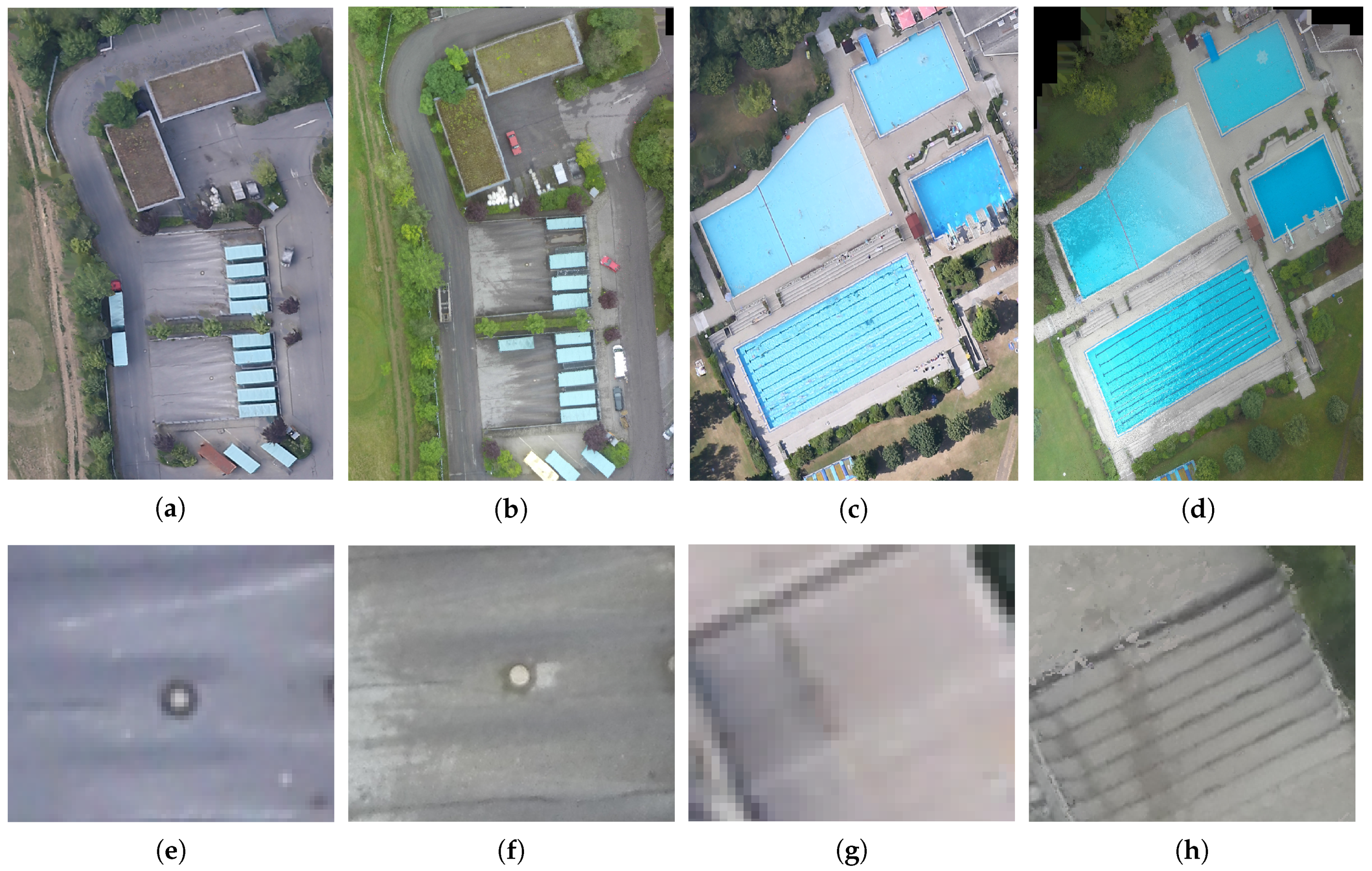
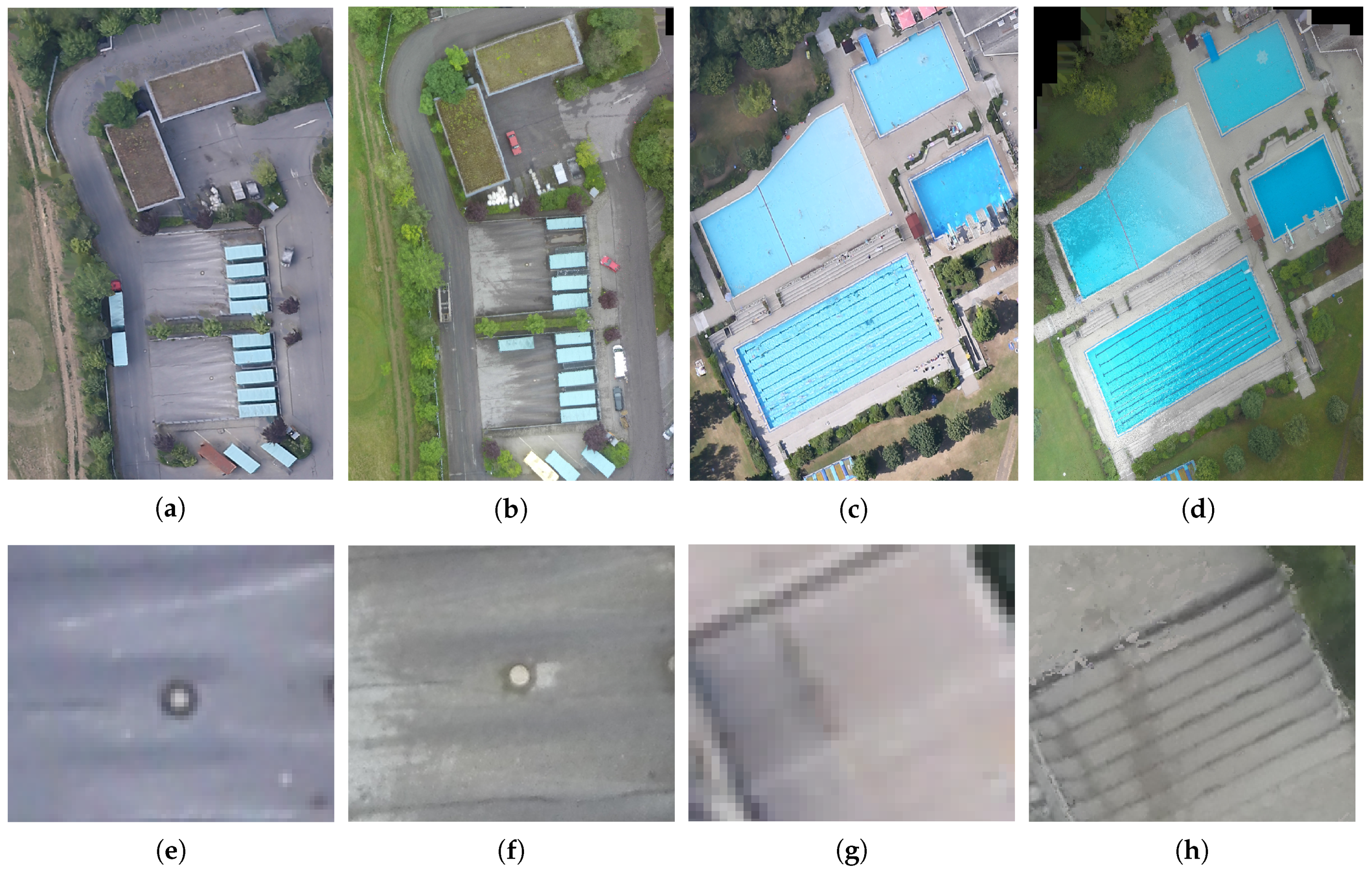
Figure 14.
Comparison of (a,c) aerial orthophotos with 20-cm GSD and (b,d) UAV orthophotos with 2-cm GSD of the Germering dataset; (e,f) compare a manhole and (g,h) staircases on the aerial and UAV orthophoto, respectively.
Figure 14.
Comparison of (a,c) aerial orthophotos with 20-cm GSD and (b,d) UAV orthophotos with 2-cm GSD of the Germering dataset; (e,f) compare a manhole and (g,h) staircases on the aerial and UAV orthophoto, respectively.
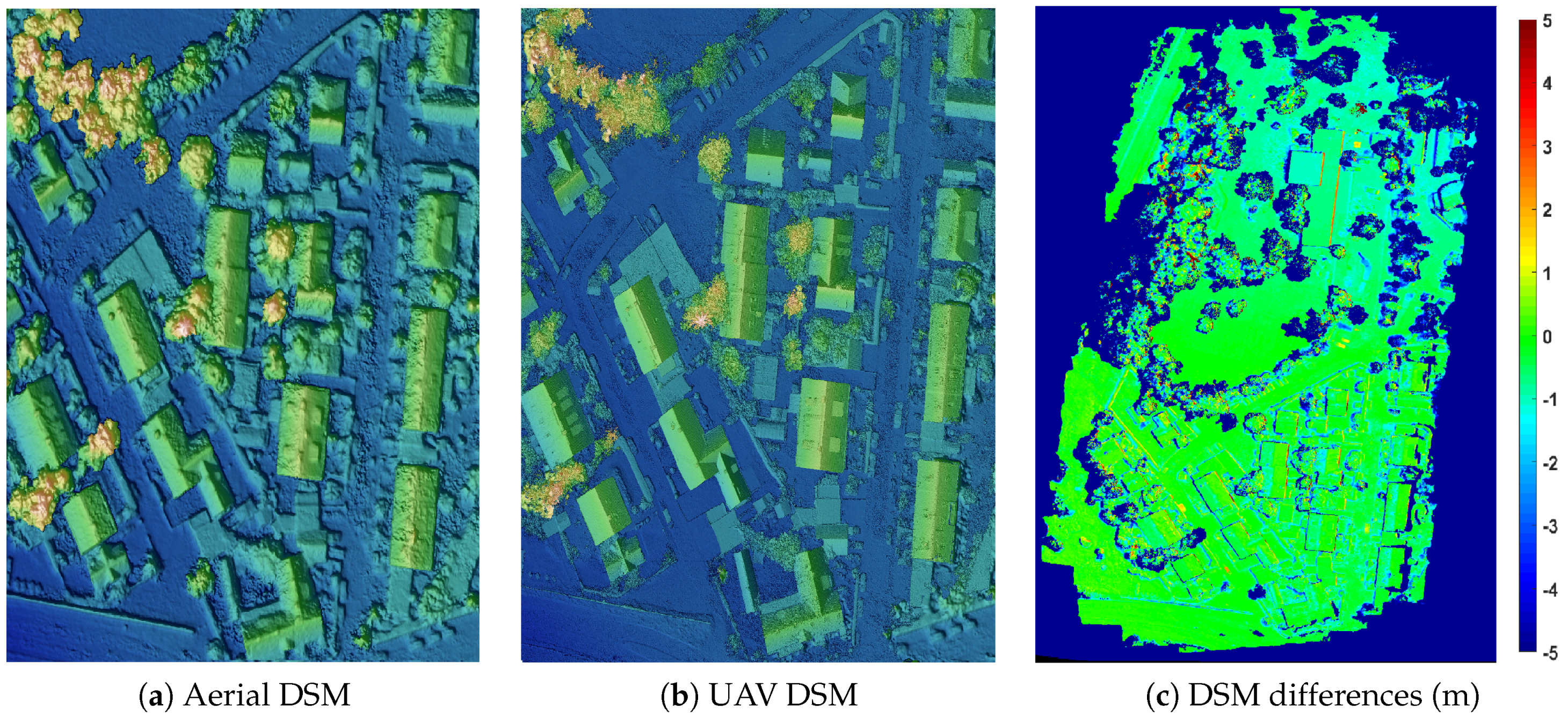
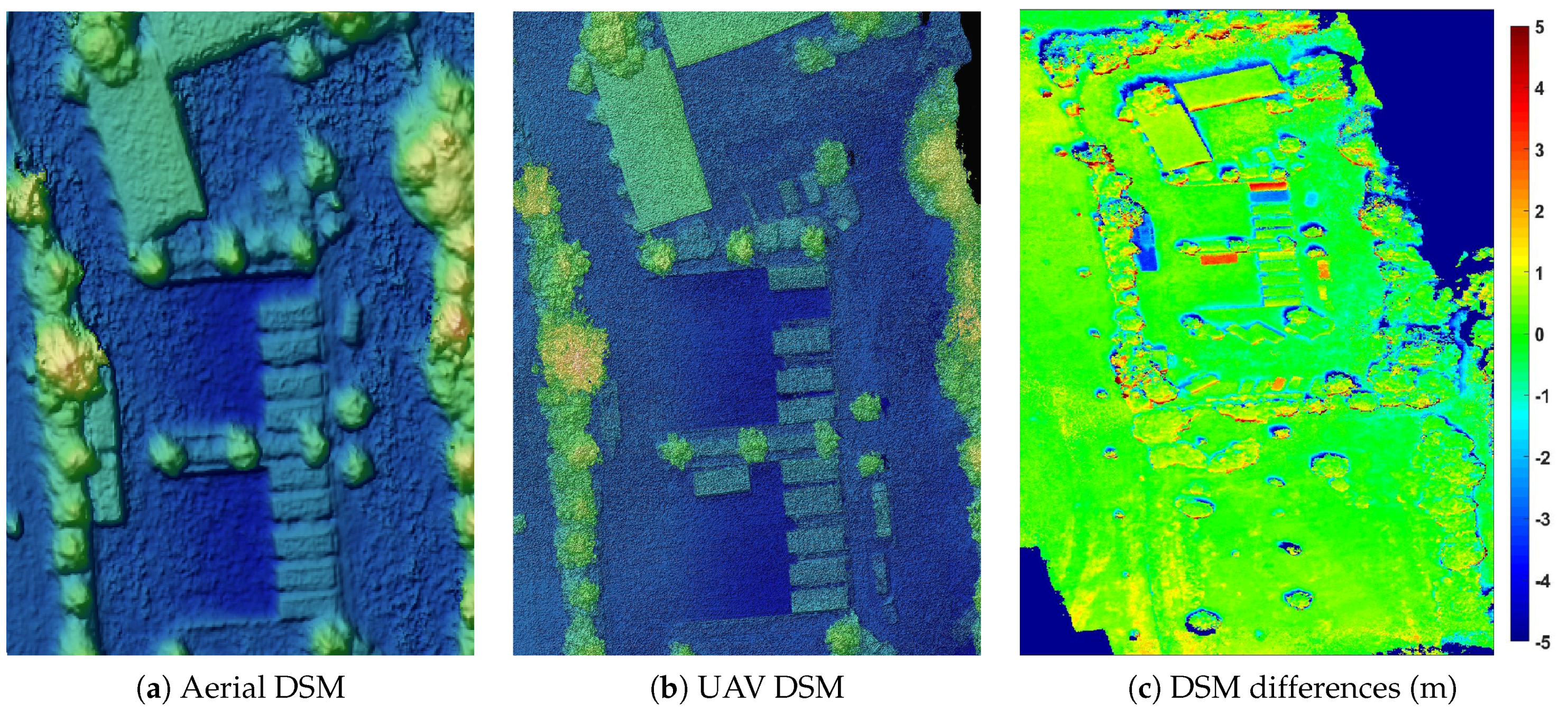
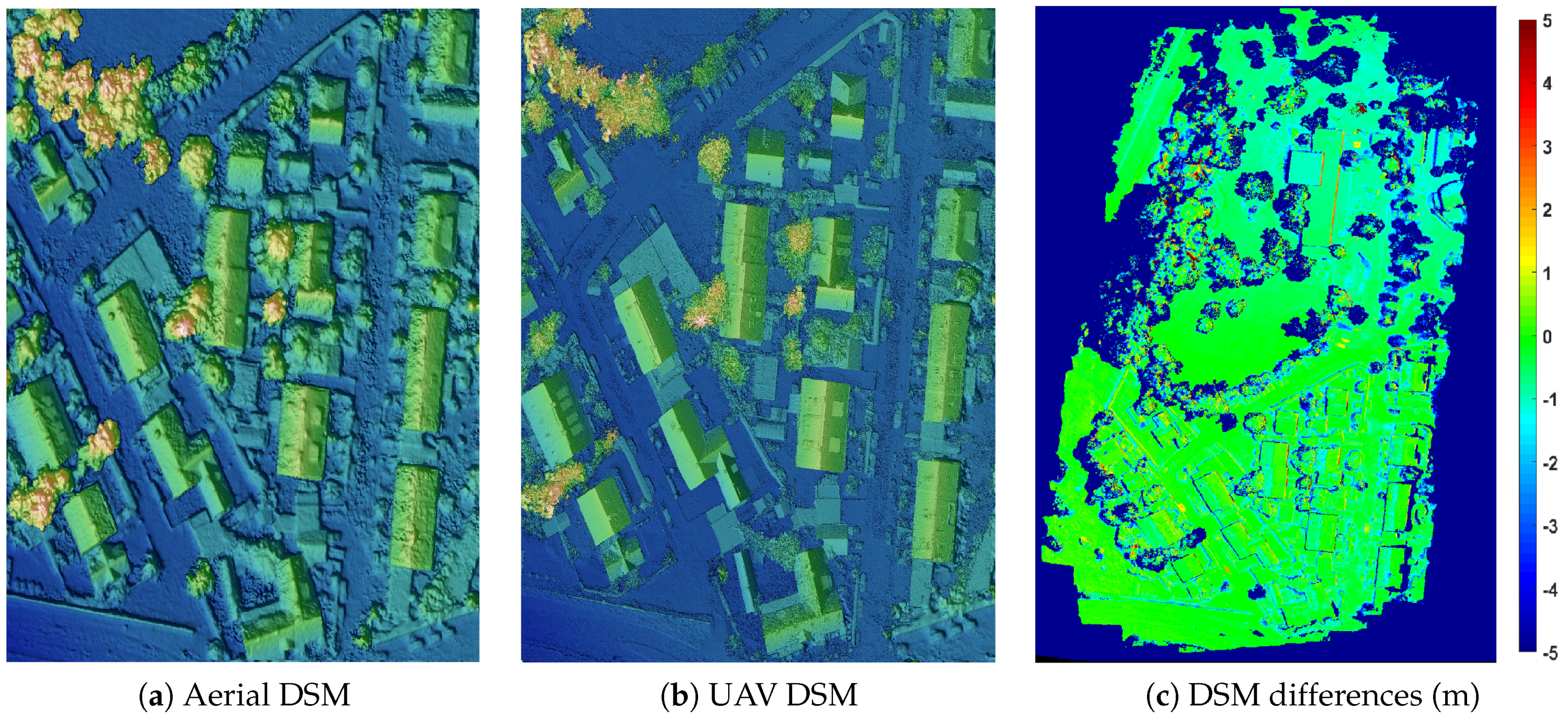
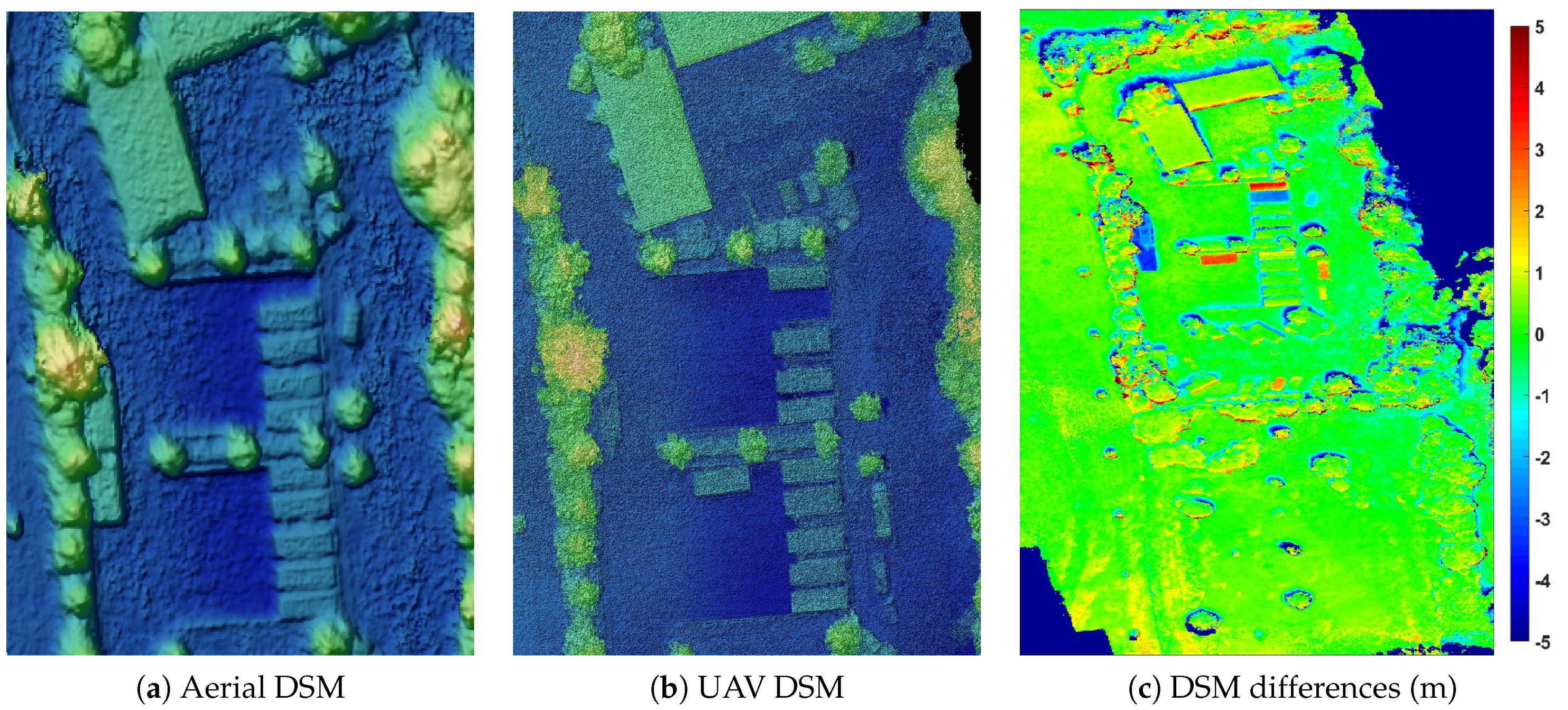
Figure 15.
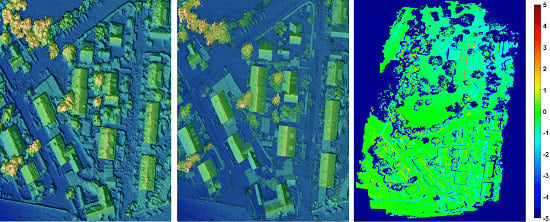
Comparison of (a) aerial and (b) UAV DSM of the Eichenau dataset. 20-cm GSD for aerial and 2-cm GSD for UAV DSM. (c) Color map illustrating the height differences between the two DSMs in meters.
Figure 15.
Comparison of (a) aerial and (b) UAV DSM of the Eichenau dataset. 20-cm GSD for aerial and 2-cm GSD for UAV DSM. (c) Color map illustrating the height differences between the two DSMs in meters.
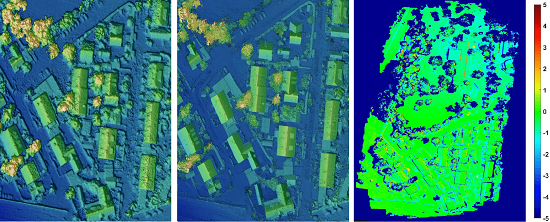
Figure 16.
Comparison of (a) aerial and (b) UAV DSM of the Germering dataset. 20-cm GSD for aerial and 2-cm GSD for UAV DSM. (c) Color map illustrating the height differences between the two DSMs in meters.
Figure 16.
Comparison of (a) aerial and (b) UAV DSM of the Germering dataset. 20-cm GSD for aerial and 2-cm GSD for UAV DSM. (c) Color map illustrating the height differences between the two DSMs in meters.
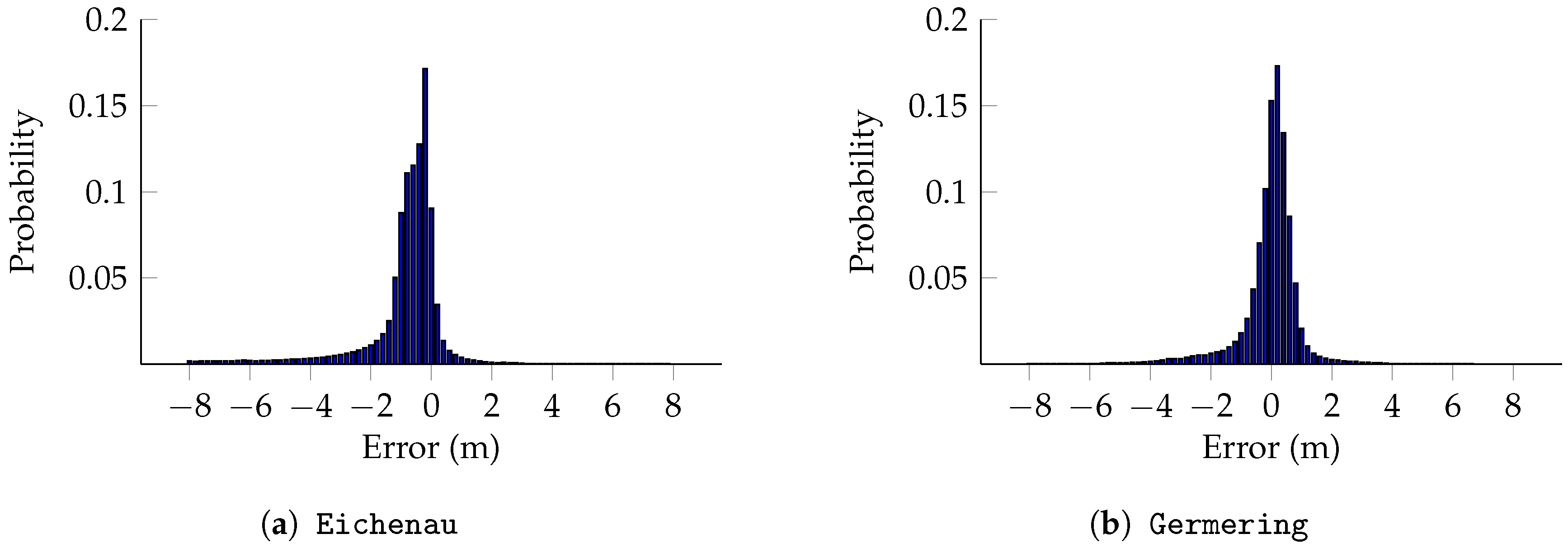
Figure 17.
Histograms of the height differences between the aligned DSMs generated from UAV and aerial images for the (a) Eichenau and (b) Germing datasets.
Figure 17.
Histograms of the height differences between the aligned DSMs generated from UAV and aerial images for the (a) Eichenau and (b) Germing datasets.
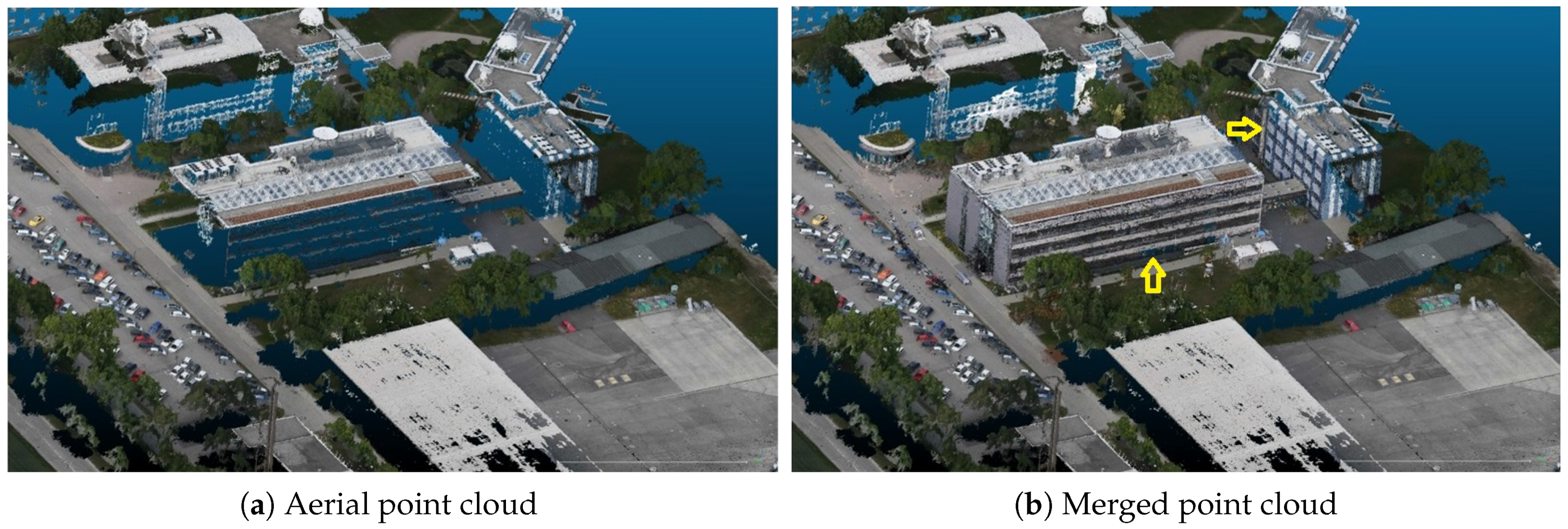
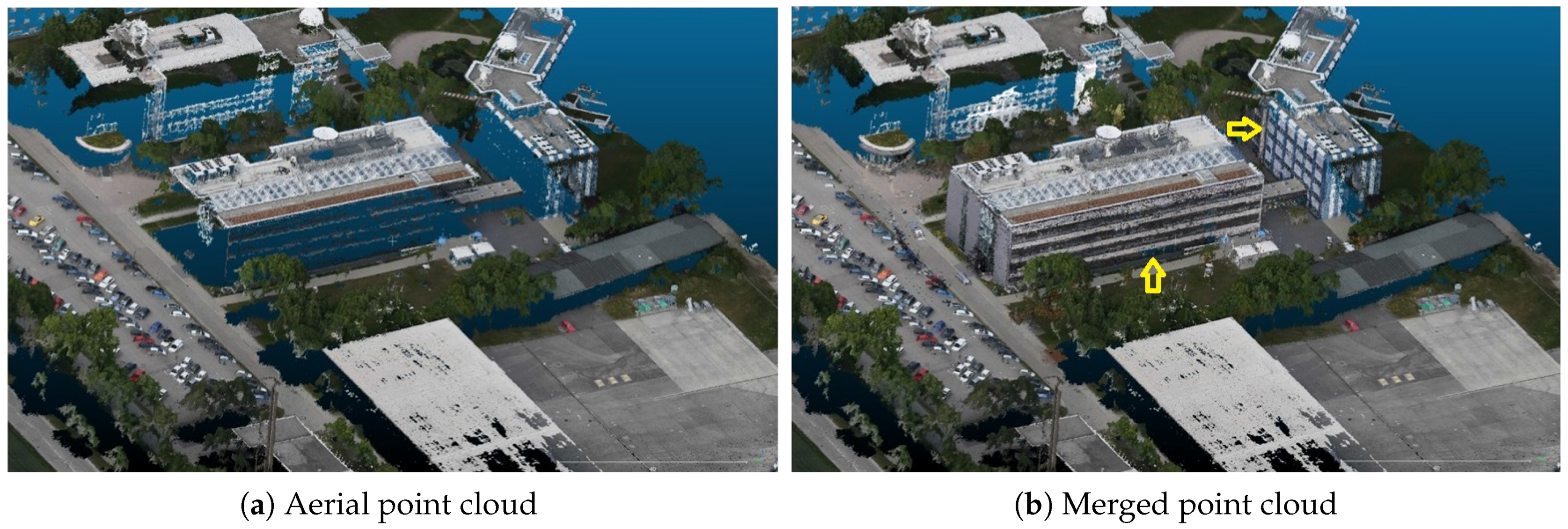
Figure 18.
Comparison of the dense point clouds for (a) only aerial images and (b) additional registered nadir and oblique UAV images of the EOC dataset. The combination of aerial and UAV images can enrich 3D models for more details and add facades to buildings.
Figure 18.
Comparison of the dense point clouds for (a) only aerial images and (b) additional registered nadir and oblique UAV images of the EOC dataset. The combination of aerial and UAV images can enrich 3D models for more details and add facades to buildings.
Table 1.
Comparison between UAV and manned aircraft photogrammetry.
Table 1.
Comparison between UAV and manned aircraft photogrammetry.
| | UAV Photogrammetry | Manned Aircraft Photogrammetry |
|---|
| Coverage | m–km | km |
| Image resolution/GSD | mm–cm | cm–dm |
| Geo-registration possibility | low quality GNSS/IMU | high quality GNSS/IMU |
| | meter-level accuracy | centimeter-level accuracy |
| Price and operating cost | low-moderate | high |
| | applicable in hazardous areas | less mobile |
| Flexibility | works in cloudy/drizzly weather | weather-dependent |
| | remotely controlled | pilot needed |
Table 2.
Analysis of SIFT performance with different octaves and levels for the Container dataset. Cells contain the number of correct matches (first number) from the set of remaining matches (second number) after applying the ratio test with a fixed threshold of . Due to the scale adaption of the UAV image, the number of keypoint detections saturates after two octaves. By increasing the levels, more keypoints can be detected, but the ratio of inliers decreases.
Table 2.
Analysis of SIFT performance with different octaves and levels for the Container dataset. Cells contain the number of correct matches (first number) from the set of remaining matches (second number) after applying the ratio test with a fixed threshold of . Due to the scale adaption of the UAV image, the number of keypoint detections saturates after two octaves. By increasing the levels, more keypoints can be detected, but the ratio of inliers decreases.
| | Levels |
|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|
| Octaves | 1 | 12/50 | 15/61 | 15/64 | 17/74 | 17/84 | 11/91 | 17/78 | 14/91 |
| 2 | 13/61 | 17/71 | 12/89 | 20/103 | 25/124 | 16/134 | 26/137 | 21/148 |
| 3 | 13/63 | 17/76 | 13/93 | 22/108 | 26/131 | 17/142 | 27/148 | 22/153 |
| 4 | 13/62 | 17/77 | 13/94 | 22/109 | 26/134 | 17/146 | 27/155 | 22/158 |
| 5 | 13/62 | 17/77 | 13/93 | 22/110 | 26/136 | 17/148 | 27/157 | 22/159 |
Table 3.
Analysis of standard SIFT matching on the proposed datasets in
Figure 2. Matching was performed on downsampled UAV images and cropped aerial images on the same image content of the UAV image. Keypoint detection was limited to 3 octaves and 5 levels, and the ratio test threshold was set to
. Results show the number of feature points detected by the SIFT-detector, correct matches considering only the first nearest neighbor, after applying the ratio test and possible matches according to 100 nearest neighbors.
Table 3.
Analysis of standard SIFT matching on the proposed datasets in
Figure 2. Matching was performed on downsampled UAV images and cropped aerial images on the same image content of the UAV image. Keypoint detection was limited to 3 octaves and 5 levels, and the ratio test threshold was set to
. Results show the number of feature points detected by the SIFT-detector, correct matches considering only the first nearest neighbor, after applying the ratio test and possible matches according to 100 nearest neighbors.
| Scenario | Image Fragment Size (pix) | Keypoints | Correct Matches |
|---|
| Aerial | UAV | Aerial | UAV | Nearest | Ratio Test | Nearest 100 |
|---|
| Container | | | 3763 | 3682 | 81 | 27 | 690 |
| Highway | | | 2768 | 2560 | 46 | 22 | 521 |
| Urban1 | | | 10,335 | 6266 | 47 | 27 | 304 |
| Urban2 | | | 9642 | 5757 | 293 | 176 | 1031 |
| Pool1 | | | 5096 | 4202 | 87 | 47 | 451 |
| Pool2 | | | 5788 | 4047 | 152 | 103 | 675 |
| Building | | | 4072 | 3270 | 76 | 39 | 498 |
| Googlemaps | | | 3411 | 5963 | 45 | 21 | 565 |
Table 4.
Analysis of the influence of image rotation on matching performance. Inliers and matches for downsampled UAV images and cropped aerial images, rotation-aligned UAV images and rotation-aligned UAV images with fixed orientation in the SIFT-detector. Std., standard.
Table 4.
Analysis of the influence of image rotation on matching performance. Inliers and matches for downsampled UAV images and cropped aerial images, rotation-aligned UAV images and rotation-aligned UAV images with fixed orientation in the SIFT-detector. Std., standard.
| Scenario | Inliers/Matches |
|---|
| Std. SIFT | Std. SIFT Rotation Aligned | SIFT Rotation Aligned Fixed-Orientation |
|---|
| Container | 27/320 | 22/349 | 30/306 |
| Highway | 22/204 | 26/263 | 52/277 |
| Urban1 | 27/471 | 17/496 | 43/478 |
| Urban2 | 103/635 | 179/677 | 267/734 |
| Pool1 | 47/391 | 65/446 | 92/404 |
| Pool2 | 103/635 | 179/677 | 267/734 |
| Building | 39/349 | 27/381 | 51/396 |
| Googlemaps | 21/535 | 21/509 | 35/394 |
Table 5.
Comparison with ASIFT. Inliers and matches for pre-aligned images using standard SIFT with fixed orientation, ASIFT and pre-aligned images on ASIFT with fixed orientation.
Table 5.
Comparison with ASIFT. Inliers and matches for pre-aligned images using standard SIFT with fixed orientation, ASIFT and pre-aligned images on ASIFT with fixed orientation.
| Scenario | Inliers/Matches |
|---|
| SIFT Rotation Aligned Fixed-Orientation | Std. ASIFT | ASIFT Rotation Aligned Fixed-Orientation |
|---|
| Container | 30/306 | 25/281 | 46/283 |
| Highway | 52/227 | 56/249 | 70/237 |
| Urban1 | 43/478 | 46/512 | 61/508 |
| Urban2 | 267/734 | 254/1069 | 281/994 |
| Pool1 | 92/404 | 73/346 | 109/404 |
| Pool2 | 267/734 | 255/600 | 375/620 |
| Building | 51/396 | 45/382 | 78/424 |
| Googlemaps | 35/394 | 42/330 | 47/430 |
Table 6.
Characteristics of the datasets used in the experiment. Target images are pre-aligned towards the reference image using GNSS/IMU data. AI: aerial imagery; AO: aerial orthophoto; SI: satellite imagery; UI: UAV imagery.
Table 6.
Characteristics of the datasets used in the experiment. Target images are pre-aligned towards the reference image using GNSS/IMU data. AI: aerial imagery; AO: aerial orthophoto; SI: satellite imagery; UI: UAV imagery.
| Dataset | Reference Image | Target Image |
|---|
| Type/Date | Resolution | Height | GSD | Type/Date | Resolution | Height | GSD |
|---|
| (pix) | (m) | (cm) | (pix) | (m) | (cm) |
|---|
| Eichenau | AO 11/2015 | | 600 | 20 | UI 11/2015 | | 100 | 1.8 |
| Germering | AI 06/2014 | | 700 | 9.4 | UI 07/2014 | | 100 | 2 |
| EOC | AI 06/2014 | | 340 | 4.6 | UI 11/2014 | | 25–40 | 0.5–0.8 |
| WV2 | SI 2010 | | 770,000 | 46 | AI 2015 | | 350 | 4.4 |
Table 7.
Results using standard SIFT: number of raw matches after applying SIFT for all scenarios. Inliers after estimating the fundamental matrix (F) and homography (H) using RANSAC. Mean errors (in pixel) according to ground-truths F and H.
Table 7.
Results using standard SIFT: number of raw matches after applying SIFT for all scenarios. Inliers after estimating the fundamental matrix (F) and homography (H) using RANSAC. Mean errors (in pixel) according to ground-truths F and H.
| Scenario | Raw Matches (SIFT) | Inliers F/Error (F) | Inliers H/Error (H) |
|---|
| Container | 58 | 14/666.26 | 9/1767.55 |
| Highway | 49 | 15/1996.30 | 9/2210.20 |
| Pool1 | 162 | 52/0.83 | 33/1.63 |
| Pool2 | 107 | 18/618.54 | 10/1308.02 |
| Eichenau1 | 287 | 45/19.11 | 48/3.63 |
| Eichenau2 | 436 | 140/1.11 | 146/3.64 |
| EOC | 446 | 16/959.87 | 6/877.21 |
| WV2 | 117 | 19/175.73 | 19/4.03 |
| Building | 553 | 16/595.06 | 11/317.59 |
| Googlemaps | 522 | 19/195.34 | 8/919.48 |
Table 8.
Results using the proposed method: number of raw matches after applying our method for all scenarios. Inliers after estimating fundamental matrix (F) and homography (H) using RANSAC. Mean errors (in pixel) according to ground-truths F and H.
Table 8.
Results using the proposed method: number of raw matches after applying our method for all scenarios. Inliers after estimating fundamental matrix (F) and homography (H) using RANSAC. Mean errors (in pixel) according to ground-truths F and H.
| Scenario | Raw Matches (Our) | Inliers F/Error (F) | Inliers H/Error (H) |
|---|
| Container | 8264 | 4876/2.59 | 2835/7.01 |
| Highway | 1979 | 1184/2.79 | 1230/1.20 |
| Pool1 | 6593 | 3599/1.87 | 2188/1.87 |
| Pool2 | 14,091 | 7555/2.01 | 4199/2.03 |
| Eichenau1 | 4018 | 1850/4.35 | 1165/3.53 |
| Eichenau2 | 5846 | 3204/1.09 | 3077/4.65 |
| EOC | 6834 | 3949/2.92 | 2586/3.18 |
| WV2 | 15,131 | 6290/2.22 | 6760/3.57 |
| Building | 9113 | 3526/3.15 | 1932/2.36 |
| Googlemaps | 15,437 | 5120/3.42 | 3217/2.82 |
Table 9.
Errors of the coordinates of check points compared to RTK GNSS measurements and the coordinates looked up in the aerial orthophoto and DSM: Eichenau dataset.
Table 9.
Errors of the coordinates of check points compared to RTK GNSS measurements and the coordinates looked up in the aerial orthophoto and DSM: Eichenau dataset.
| Check Point | | |
|---|
| | | | | |
|---|
| 1 | 0.04 | −0.51 | −0.21 | −0.04 | −0.39 | −1.74 |
| 2 | −0.05 | −0.07 | −0.15 | −0.11 | −0.40 | −1.90 |
| 3 | 0.04 | −0.41 | −0.36 | −0.10 | −0.83 | −2.04 |
| 4 | −0.14 | 0.80 | 0.70 | −0.35 | −0.33 | −1.91 |
| 5 | −0.04 | 0.49 | −0.17 | −0.05 | −0.21 | −1.81 |
| 6 | −0.03 | 0.12 | −0.10 | 0.12 | −0.36 | −1.63 |
Table 10.
Errors of the coordinates of check points compared to RTK GNSS measurements and the coordinates triangulated using aerial images: Germering dataset.
Table 10.
Errors of the coordinates of check points compared to RTK GNSS measurements and the coordinates triangulated using aerial images: Germering dataset.
| Check Point | | |
|---|
| | | | | |
|---|
| 1 | −0.06 | −0.14 | −0.38 | 0.34 | −0.01 | 1.49 |
| 2 | 0.16 | −0.67 | 0.37 | 0.43 | −0.54 | 1.68 |
| 3 | 0.14 | −0.02 | 0.46 | 0.56 | 0.16 | 1.76 |
| 4 | 0.11 | −0.76 | 0.26 | 0.44 | −0.76 | 1.71 |
| 5 | 0.19 | −0.10 | 0.50 | 0.55 | −0.06 | 0.75 |
| 6 | −0.05 | 0.18 | 0.18 | 0.39 | 0.36 | 1.30 |
| 7 | −0.08 | 0.41 | −0.06 | 0.41 | 0.50 | 1.42 |












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}