
Understanding Forest Health with Remote Sensing-Part II—A Review of Approaches and Data Models



Abstract
:
1. Introduction
- Which factors are important when designing FHM programs that combine terrestrial and remote-sensing data?
- Which remote sensors and systems are suitable for monitoring which FH indicators?
- Which new technologies and current developments are relevant for the design of future FHM programs?
2. Trends in Close-Range RS Approaches for Assessing FH
2.1. Close-Range RS Approaches—Spectral Laboratory, Plant Phenomics Facilities and Ecotrons
2.2. Close-Range RS Approaches—Towers
2.3. Close-Range RS Approaches—Wireless Sensor Networks (WSN)
3. Trends in Air-and Space-Borne RS for Assessing FH
3.1. Light Detection and Ranging (LiDAR)
3.2. RADAR
3.3. Multi-Sensor Approaches
4. Physical vs. Empirical Models
5. Conclusions
- Stress, disturbances or resource limitations in FES can manifest in the molecular, genetic, epigenetic, biochemical, biophysical or morphological-structural changes of traits and affect trait variations [17,259,260,261] which can lead to irreversible changes in taxonomic, structural and functional diversity in FES.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| AGB | Above Ground Biomass |
| ALOS-3 | Advanced Land Observation Satellite 3 |
| AVHRR | Advanced Very High Resolution Radiometer |
| BRDF | Bidirectional Reflectance Distribution Function |
| CART | Classification and Regression Trees |
| CR | Canopy Reflectance |
| DBH | Diameter at Breast Height |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| EnMAP | Environmental Mapping and Analysis Program |
| ESA | European Space Agency |
| FAO | Food and Agriculture Organization of the United Nations |
| FES | Forest Ecosystems |
| FH | Forest Health |
| FHM | Forest Health Monitoring |
| FLEX | Fluorescence Explorer |
| FRA | Global Forest Resources Assessment |
| GCEF | Global Change Experimental Facility |
| GEDI | Global Ecosystem Dynamics Investigations |
| GLAS | Geoscience Laser Altimeter System |
| GLCM | Gray-Level Co-Occurence Matrix |
| GPP | Gross Primary Productivity |
| GPS | Global Positioning System |
| HISUI | Hyperpsectral Imager Suite |
| HySPIRI | Hyperspectral Infrared Imager |
| ICESat | Ice, Cloud and Land Elevation Satellite |
| ICOS | Integrated Carbon Observation System |
| ICP | International Co-operative Programme on Assessment and Monitoring of Air Pollution on Forests |
| INS | Internal Navigation System |
| InSAR | Interferometric Synthetic Aperture RADAR |
| IPPN | International Plant Phenotyping Network |
| JERS | Japanese Earth Resources Satellite |
| Knn | K-Nearst Neighbour |
| LAI | Leaf Area Index |
| LiDAR | Light Detection and Ranging |
| LOD | Linked Open Data |
| LWIR | Long-wave infrared |
| MIR | Mid-wave-infrared |
| MODIS | Moderate Resolution Imaging Spectroradiometer |
| NASA | National Aeronautics and Space Administration |
| NDVI | Normalized Difference Vegetation Index |
| NEON | National Ecological Observatory Network |
| NOAA | National Oceanic and Atmospheric Administration |
| PALSAR | Phased Array type L-band Synthetic Aperture RADAR |
| PRI | Photochemical Reflectance Index |
| RADAR | Radio Detection And Ranging |
| RF | Random Forests |
| RMA | Reduced Major Axis Regression |
| RMSE | Root Mean Square Error |
| RS | Remote Sensing |
| RT | Radiative Transfer |
| RVoG | Random Volume over Ground |
| SAR | Synthetic Aperture RADAR |
| SIR | Shuttle Imaging RADAR |
| ST | Spectral Traits |
| STV | Spectral Trait Variation |
| SVM | Support Vector Machine |
| TIR | Thermal Infrared, Thermal Infrared |
| TRGM | Thermal Radiosity Graphics Model |
| UAV | Unmanned Aerial Vehicle |
| UNECE | United Nations Economic Commission for Europe |
| USDA | United States Department of Agriculture |
| WCM | Water Cloud Model |
| WSN | Wireless sensor networks |
References
- Roy, B.A.; Alexander, H.M.; Davidson, J.; Campbell, F.T.; Burdon, J.J.; Sniezko, R.; Brasier, C. Increasing forest loss worldwide from invasive pests requires new trade regulations. Front. Ecol. Environ. 2014, 12, 457–465. [Google Scholar] [CrossRef]
- Food and Agriculture Organization of the United Nations. State of Europe’s forests 2015. In Proceedings of the Ministerial Conference on the Protection of Forests in Europe, Madrid, Spain, 20–21 October 2015.
- Potter, K.M.; Conkling, B.L. Forest Health Monitoring: National Status, Trends, and Analysis; U.S. Department of Agriculture: Asheville, NC, USA, 2015.
- Yang, J.; Dai, G.; Wang, S. China’s National Monitoring Program on Ecological Functions of Forests: An Analysis of the Protocol and Initial Results. Forests 2015, 6, 809–826. [Google Scholar] [CrossRef]
- Tomppo, E.; Gschwantner, T.; Lawrence, M.; McRoberts, E.R. National Forest Inventories. Pathways for Common Reporting; Springer: Heidelberg, Germany; Dordrecht, The Netherlands; London, UK; New York, NY, USA, 2010. [Google Scholar]
- Johann Heinrich von Thünen-Institute, Forest Condition Monitoring (FCM) Level-I-Monitoring. Available online: https://www.thuenen.de/de/wo/arbeitsbereiche/waldmonitoring/ (accessed on 3 January 2017).
- Federal Ministry for Food and Agriculture, National Forest Inventory Level-III-Monitoring. Available online: https://bwi.info/ (accessed on 3 January 2017).
- United States Department of Agriculture(USDA), Forest Service, FH Monitoring. Available online: https://www.fs.fed.us/foresthealth/monitoring/index.shtml (accessed on 3 January 2017).
- Canadian Forest Service (CFS), National FHM Network. Available online: http://www.cfs.nrcan.gc.ca/publications/?id=4105 (accessed on 3 January 2017).
- National Forest Inventory (NFI), Canada, National Forest Inventory. Available online: https://nfi.nfis.org/en/ (accessed on 3 January 2017).
- United Nations Economic Commission for Europe (UNECE), ICP. Available online: http://icp-forests.net/page/icp-forests-executive-report (accessed on 3 January 2017).
- Food and Agriculture Organization of the United Nations (FAO), Forest Resources Assessment. Available online: http://www.fao.org/forest-resources-assessment/en/ (accessed on 3 January 2017).
- Woodall, C.W.; Amacher, M.C.; Bechtold, W.A.; Coulston, J.W.; Jovan, S.; Perry, C.H.; Randolph, K.C.; Schulz, B.K.; Smith, G.C.; Tkacz, B.; et al. Status and future of the forest health indicators program of the USA. Environ. Monit. Assess. 2011, 177, 419–436. [Google Scholar] [CrossRef] [PubMed]
- Pause, M.; Schweitzer, C.; Rosenthal, M.; Keuck, V.; Bumberger, J.; Dietrich, P.; Heurich, M.; Jung, A.; Lausch, A. In Situ/Remote Sensing Integration to Assess Forest Health—A Review. Remote Sens. 2016, 8, 471. [Google Scholar] [CrossRef]
- Trumbore, S.; Brando, P.; Hartmann, H. Forest health and global change. Science 2015, 349, 814–818. [Google Scholar] [CrossRef] [PubMed]
- Lausch, A.; Erasmi, S.; King, D.J.; Magdon, P.; Heurich, M. Understanding forest health by remote sensing Part I—A review of spectral traits, processes and remote sensing characteristics. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Garnier, E.; Lavorel, S.; Ansquer, P.; Castro, H.; Cruz, P.; Dolezal, J.; Eriksson, O.; Fortunel, C.; Freitas, H.; Golodets, C.; et al. Assessing the effects of land-use change on plant traits, communities and ecosystem functioning in grasslands: A standardized methodology and lessons from an application to 11 European sites. Ann. Bot. 2007, 99, 967–985. [Google Scholar] [CrossRef] [PubMed]
- Brosinsky, A.; Lausch, A.; Doktor, D.; Salbach, C.; Merbach, I.; Gwillym-Margianto, S.; Pause, M. Analysis of Spectral Vegetation Signal Characteristics as a Function of Soil Moisture Conditions Using Hyperspectral Remote Sensing. J. Indian Soc. Remote Sens. 2013, 42, 311–324. [Google Scholar] [CrossRef]
- Wollschla’ger, U.; Attinger, S.; Borchardt, D.; Brauns, M.; Cuntz, M.; Dietrich, P.; Fleckenstein, J.H.; Friese, K.; Friesen, J.; Harpke, A.; et al. The Bode Hydrological Observatory: A platform for integrated, interdisciplinary hydro- ecological research within the TERENO Harz/Central German Lowland Observatorytle. Environ. Earth Sci. 2010, 76, 29. [Google Scholar] [CrossRef]
- Clasen, A.; Somers, B.; Pipkins, K.; Tits, L.; Segl, K.; Brell, M.; Kleinschmit, B.; Spengler, D.; Lausch, A.; Förster, M. Spectral unmixing of forest crown components at close range, airborne and simulated Sentinel-2 and EnMAP spectral imaging scale. Remote Sens. 2015, 7, 15361–15387. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E. Airborne spectranomics: Mapping canopy chemical and taxonomic diversity in tropical forests. Front. Ecol. Environ. 2009, 7, 269–276. [Google Scholar] [CrossRef]
- Asner, G.P.; Anderson, C.B.; Martin, R.E.; Tupayachi, R.; Knapp, D.E.; Sinca, F. Landscape biogeochemistry reflected in shifting distributions of chemical traits in the Amazon forest canopy. Nat. Geosci. 2015, 8, 567–573. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E. Spectral and chemical analysis of tropical forests: Scaling from leaf to canopy levels. Remote Sens. Environ. 2008, 112, 3958–3970. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E. Canopy phylogenetic, chemical and spectral assembly in a lowland Amazonian forest. New Phytol. 2011, 189, 999–1012. [Google Scholar] [CrossRef] [PubMed]
- Nink, S.; Hill, J.; Buddenbaum, H.; Stoffels, J.; Sachtleber, T.; Langshausen, J. Assessing the suitability of future multi- and hyperspectral satellite systems for mapping the spatial distribution of norway spruce timber volume. Remote Sens. 2015, 7, 12009–12040. [Google Scholar] [CrossRef]
- Buddenbaum, H.; Rock, G.; Hill, J.; Werner, W. European Journal of Remote Sensing Measuring Stress Reactions of Beech Seedlings with PRI, Fluorescence, Temperatures and Emissivity from VNIR and Thermal Field Imaging Spectroscopy. Eur. J. Remote Sens. Eur. J. Remote Sens. 2015, 48, 263–282. [Google Scholar] [CrossRef]
- Buddenbaum, H.; Stern, O.; Paschmionka, B.; Hass, E.; Gattung, T.; Stoffels, J.; Hill, J.; Werner, W. Using VNIR and SWIR field imaging spectroscopy for drought stress monitoring of beech seedlings. Int. J. Remote Sens. 2015, 36, 4590–4605. [Google Scholar] [CrossRef]
- Lausch, A.; Pause, M.; Schmidt, A.; Salbach, C.; Gwillym-Margianto, S.; Merbach, I. Temporal hyperspectral monitoring of chlorophyll, LAI, and water content of barley during a growing season. Can. J. Remote Sens. 2013, 39, 191–207. [Google Scholar] [CrossRef]
- Doktor, D.; Lausch, A.; Spengler, D.; Thurner, M. Extraction of plant physiological status from hyperspectral signatures using machine learning methods. Remote Sens. 2014, 6, 12247–12274. [Google Scholar] [CrossRef]
- Furbank, R.T. Plant phenomics: From gene to form and function. Funct. Plant Biol. 2009, 36, 5–6. [Google Scholar]
- Ehrhardt, D.W.; Frommer, W.B.; Ehrhardt, D.W. New technologies for 21st century plant science. Plant Cell 2012, 24, 374–394. [Google Scholar] [CrossRef] [PubMed]
- Fiorani, F.; Schurr, U. Future scenarios for plant phenotyping. Annu. Rev. Plant Biol. 2013, 64, 267–291. [Google Scholar] [CrossRef] [PubMed]
- Großkinsky, D.K.; Svensgaard, J.; Christensen, S.R.T. Plant phenomics and the need for physiological phenotyping across scales to narrow the genotype-to-phenotype knowledge gap. J. Exp. Bot. 2015, 66, 5429–5440. [Google Scholar] [CrossRef] [PubMed]
- Großkinsky, D.K.; Pieruschka, R.; Svensgaard, J.; Rascher, U.; Christensen, S.; Schurr, U.; Roitsch, T. Phenotyping in the fields: Dissecting the genetics of quantitative traits and digital farming. New Phytol. 2015, 207, 950–952. [Google Scholar] [CrossRef] [PubMed]
- Pieruschka, R.; Lawson, T. Preface. J. Exp. Bot. 2015, 66, 5385–5387. [Google Scholar] [CrossRef] [PubMed]
- Virlet, N.; Costes, E.; Martinez, S.; Kelner, J.J.; Regnard, J.L. Multispectral airborne imagery in the field reveals genetic determinisms of morphological and transpiration traits of an apple tree hybrid population in response to water deficit. J. Exp. Bot. 2015, 66, 5453–5465. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Zhang, Q.; Huang, D. A review of imaging techniques for plant phenotyping. Sensors (Switzerland) 2014, 14, 20078–20111. [Google Scholar] [CrossRef] [PubMed]
- Lawton, J.H.; Naeem, S.; Woodfin, R.M.; Brown, V.K.; Gange, A.; Godfray, H.C.J.; Heads, P.A.; Lawler, S.; Magda, D.; Thomas, C.D.; et al. The Ecotron: A controlled environmental facility for the investigation of population and ecosystem processes. Philos. Trans. Biol. Sci. 1993, 341, 181–194. [Google Scholar] [CrossRef]
- Eisenhauer, N.; Barnes, A.D.; Cesarz, S.; Craven, D.; Ferlian, O.; Gottschall, F.; Hines, J.; Sendek, A.; Siebert, J.; Thakur, M.P.; et al. Biodiversity-ecosystem function experiments reveal the mechanisms underlying the consequences of biodiversity change in real world ecosystems. J. Veg. Sci. 2016, 27, 1061–1070. [Google Scholar] [CrossRef]
- Bradford, M.A.; Tordoff, G.M.; Eggers, T.; Jones, T.H.; Newington, J.E. Microbiota, fauna, and mesh size interactions in litter decomposition. Oikos 2002, 99, 317–323. [Google Scholar] [CrossRef]
- Kiirats, O.; Cruz, J.A.; Edwards, G.E.; Kramer, D.M. Feedback limitation of photosynthesis at high CO2 acts by modulating the activity of the chloroplast ATP synthase. Funct. Plant Biol. 2009, 36, 893. [Google Scholar] [CrossRef]
- Busch, F.; Hüner, N.P.A.; Ensminger, I. Biochemical constrains limit the potential of the photochemical reflectance index as a predictor of effective quantum efficiency of photosynthesis during the winter spring transition in Jack pine seedlings. Funct. Plant Biol. 2009, 36, 1016. [Google Scholar] [CrossRef]
- Ač, A.; Malenovský, Z.; Hanuš, J.; Tomášková, I.; Urban, O.; Marek, M.V. Near-distance imaging spectroscopy investigating chlorophyll fluorescence and photosynthetic activity of grassland in the daily course. Funct. Plant Biol. 2009, 36, 1006–1015. [Google Scholar] [CrossRef]
- Siebke, K.; Ball, M.C. Non-destructive measurement of chlorophyll b: A ratios and identification of photosynthetic pathways in grasses by reflectance spectroscopy. Funct. Plant Biol. 2009, 36, 857–866. [Google Scholar] [CrossRef]
- Rascher, U.; Alonso, L.; Burkart, A.; Cilia, C.; Cogliati, S.; Colombo, R.; Damm, A.; Drusch, M.; Guanter, L.; Hanus, J.; et al. Sun-induced fluorescence—A new probe of photosynthesis: First maps from the imaging spectrometer HyPlant. Glob. Chang. Biol. 2015, 21, 4673–4684. [Google Scholar] [CrossRef] [PubMed]
- Rascher, U. FLEX—Fluorescence Explorer: A remote sensing approach to quatify spatio-temporal variations of photosynthetic efficiency from space. Photosynth. Res. 2007, 91, 1387–1390. [Google Scholar]
- Jansen, M.; Gilmer, F.; Biskup, B.; Nagel, K.A.; Rascher, U.; Fischbach, A.; Briem, S.; Dreissen, G.; Tittmann, S.; Braun, S.; et al. Simultaneous phenotyping of leaf growth and chlorophyll fluorescence via Growscreen Fluoro allows detection of stress tolerance in Arabidopsis thaliana and other rosette plants. Funct. Plant Biol. 2009, 36, 902–914. [Google Scholar] [CrossRef]
- Konishi, A.; Eguchi, A.; Hosoi, F.; Omasa, K. 3D monitoring spatio–temporal effects of herbicide on a whole plant using combined range and chlorophyll a fluorescence imaging. Funct. Plant Biol. 2009, 36, 874–879. [Google Scholar] [CrossRef]
- Schimel, D.; Pavlick, R.; Fisher, J.B.; Asner, G.P.; Saatchi, S.; Townsend, P.; Miller, C.; Frankenberg, C.; Hibbard, K.; Cox, P. Observing terrestrial ecosystems and the carbon cycle from space. Glob. Chang. Biol. 2015, 21, 1762–1776. [Google Scholar] [CrossRef] [PubMed]
- Baldocchi, D.; Falge, E.; Gu, L.H.; Olson, R.; Hollinger, D.; Running, S.; Anthoni, P.; Bernhofer, C.; Davis, K.; Evans, R.; et al. FLUXNET: A New Tool to Study the Temporal and Spatial Variability of Ecosystem-Scale Carbon Dioxide, Water Vapor, and Energy Flux Densities. Bull. Am. Meteorol. Soc. 2001, 82, 2415–2434. [Google Scholar] [CrossRef]
- Brown, T.B.; Hultine, K.R.; Steltzer, H.; Denny, E.G.; Denslow, M.W.; Granados, J.; Henderson, S.; Moore, D.; Nagai, S.; Sanclements, M.; et al. Using phenocams to monitor our changing earth: Toward a global phenocam network. Front. Ecol. Environ. 2016, 14, 84–93. [Google Scholar] [CrossRef]
- Hilker, T.; Coops, N.C.; Nesic, Z.; Wulder, M.A.; Black, A.T. Instrumentation and approach for unattended year round tower based measurements of spectral reflectance. Comput. Electron. Agric. 2007, 56, 72–84. [Google Scholar] [CrossRef]
- Yu, L.; Wang, N.; Meng, X. Real-time forest fire detection with wireless sensor networks. In Proceedings of the 2005 International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2005.
- Ruiz-Garcia, L.; Lunadei, L.; Barreiro, P.; Robla, J.I. A review of wireless sensor technologies and applications in agriculture and food industry: State of the art and current trends. Sensors 2009, 9, 4728–4750. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lloret, J.; Garcia, M.; Bri, D.; Sendra, S. A wireless sensor network deployment for rural and forest fire detection and verification. Sensors 2009, 9, 8722–8747. [Google Scholar] [CrossRef] [PubMed]
- Hwang, J.; Shin, C.; Yoe, H. Study on an agricultural environment monitoring server system using wireless sensor networks. Sensors 2010, 10, 11189–11211. [Google Scholar] [CrossRef] [PubMed]
- Mafuta, M.; Zennaro, M.; Bagula, A.; Ault, G.; Gombachika, H.; Chadza, T. Successful Deployment of a Wireless Sensor Network for Precision Agriculture in Malawi. Int. J. Distrib. Sens. Netw. 2013, 2013, 1–13. [Google Scholar] [CrossRef]
- Oliveira, R.S.; Eller, C.B.; Burgess, S.; Barros, F.V.; Muller, C.; Bittencourt, P. Soil-plant-atmosphere interactions in a tropical montane cloud forest. In Proceedings of the Soil-Plant-Atmosphere Interactions in a Tropical Montane Cloud Forest, Emerging Issues in Tropical Ecohydrology, AGU CHAPMAN Conderence, Cuenca, Ecuador, 5–9 June 2016.
- Teodoro, G.S.; Eller, C.B.; Pereira, L.; Brum, M., Jr.; Mauro; Oliveira, R.S. Interplay between stomatal regulation capacity, hydraulic traits and growth performance in three shrub species in a tropical montane scrubland under contrasting water availability. In Proceedings of the Soil-Plant-Atmosphere Interactions in a Tropical Montane Cloud Forest. Emerging Issues in Tropical Ecohydrology, AGU CHAPMAN Conderence, Cuenca, Ecuador, 5–9 June 2016.
- Mauro, B., Jr.; Oliveira, R.S.; Gutierrez, J.; Licata, J.; Pypker, T.G.; Asbjornsen, H. Effects of the 2015 El-Niño extreme drought on the sapflow of trees in eastern Amazonia. In Proceedings of the Soil-Plant-Atmosphere Interactions in a Tropical Montane Cloud Forest. Emerging Issues in Tropical Ecohydrology, AGU CHAPMAN Conderence, Cuenca, Ecuador, 5–9 June 2016.
- Mollenhauer, H.; Remmler, P.; Schuhmann, G.; Lausch, A.; Merbach, I.; Assing, M.M.; Olaf, D.; Peter Bumberger, J. Adaptive Multichannel Radiation Sensors for Plant Parameter Monitoring. In Proceedings of the Geophysical Research Abstracts, EGU (European Geosciences Union General Assemply), EGU General Assembly 2016, Austria, Vienna, 17–22 April 2016.
- Mollenhauer, H.; Schima, R.; Assing, M.; Mollenhauer, O.; Dietrich, P.; Bumberger, J. Development of Innovative and Inexpensive Optical Sensors in Wireless Ad-hoc Sensor Networks for Environmental Monitoring. In Proceedings of the 12th EGU General Assembly, Wien, Austria, 12–17 April 2015.
- Müller, J. Forestry and water budget of the lowlands in northeast Germany—Consequences for the choice of tree species and for forest management. J. Water L. Dev. 2009, 13A, 133–148. [Google Scholar] [CrossRef]
- Beck, W.; Müller, J.; Eichhorn, J. Impact of heat and drought on tree and stand vitality—Dendroecological methods and first results from level 2-plots in southern Germany. Schriftenr. Forstl. Fak Univ. Göttingen ud Nordwestdtsch. Forstl. Versuchsanst 2007, 142, 120–128. [Google Scholar]
- Riggs, G.A.; Running, S.W. Detection of canopy water stress in conifers using the Airborne Imaging Spectrometer. Remote Sens. Environ. 1991, 35, 51–68. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Vierling, L.A.; Litvak, M.E.; Long, D.S.; Schulthess, U.; Ager, A.A.; Krofcheck, D.J.; Stoscheck, L. Broadband, red-edge information from satellites improves early stress detection in a New Mexico conifer woodland. Remote Sens. Environ. 2011, 115, 3640–3646. [Google Scholar] [CrossRef]
- Mittler, R.; Blumwald, E. Genetic engineering for modern agriculture: Challenges and perspectives. Annu. Rev. Plant Biol. 2010, 61, 443–462. [Google Scholar] [CrossRef] [PubMed]
- York, L.M.; Lynch, J.P. Intensive field phenotyping of maize (Zea mays L.) root crowns identifies phenes and phene integration associated with plant growth and nitrogen acquisition. J. Exp. Bot. 2015, 66, 5493–5505. [Google Scholar] [CrossRef] [PubMed]
- Lausch, A.; Pause, M.; Merbach, I.; Zacharias, S.; Doktor, D.; Volk, M.; Seppelt, R. A new multiscale approach for monitoring vegetation using remote sensing-based indicators in laboratory, field, and landscape. Environ. Monit. Assess. 2013, 185, 1215–1235. [Google Scholar] [CrossRef] [PubMed]
- Kraft, S.; Del Bello, U.; Bouvet, M.; Drusch, M.; Moreno, J. FLEX: ESA’s Earth Explorer 8 candidate mission. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012.
- Krajewski, P.; Chen, D.; Ćwiek, H.; Van Dijk, A.D.J.; Fiorani, F.; Kersey, P.; Klukas, C.; Lange, M.; Markiewicz, A.; Nap, J.P.; et al. Towards recommendations for metadata and data handling in plant phenotyping. J. Exp. Bot. 2015, 66, 5417–5427. [Google Scholar] [CrossRef] [PubMed]
- International Plant Phenotyping Network. Available online: http://www.plant-phenotyping.org/ (accessed on 3 January 2017).
- Hosoi, F.; Omasa, K. Detecting seasonal change of broad-leaved woody canopy leaf area density profile using 3D portable LIDAR imaging. Funct. Plant Biol. 2009, 36, 998–1005. [Google Scholar] [CrossRef]
- Chen, X. A case study using remote sensing data to compare biophysical properties of a forest and an urban area in Northern Alabama, USA. J. Sustain. For. 2016, 35, 261–279. [Google Scholar] [CrossRef]
- Yang, Y.; Guan, H.; Batelaan, O.; McVicar, T.R.; Long, D.; Piao, S.; Liang, W.; Liu, B.; Jin, Z.; Simmons, C.T. Contrasting responses of water use efficiency to drought across global terrestrial ecosystems. Sci. Rep. 2016, 6. [Google Scholar] [CrossRef] [PubMed]
- FLUXNET. Available online: http://www.fluxnet.ornl.gov/ (accessed on 3 January 2017).
- Gamon, J.A.; Rahman, A.F.; Dungan, J.L.; Schildhauer, M.; Huemmrich, K.F. Spectral Network (SpecNet)-What is it and why do we need it? Remote Sens. Environ. 2006, 103, 227–235. [Google Scholar] [CrossRef]
- Spectral network (SpecNet). Available online: http://specnet.info (accessed on 3 January 2017).
- Hart, J.K.; Martinez, K. Environmental Sensor Networks: A revolution in the earth system science? Earth-Sci. Rev. 2006, 78, 177–191. [Google Scholar] [CrossRef]
- Collins, S.L.; Bettencourt, L.M.; Hagberg, A.; Brown, R.F.; Moore, D.I.; Bonito, G.; Delin, K.A.; Jackson, S.P.; Johnson, D.W.; Burleigh, S.C.; et al. New opportunities in ecological sensing using wireless sensor networks. Front. Ecol. Environ. 2006, 4, 402–407. [Google Scholar] [CrossRef]
- Clark, J.S.; Agarwal, P.; Bell, D.M.; Flikkema, P.G.; Gelfand, A.; Nguyen, X.L.; Ward, E.; Yang, J. Inferential ecosystem models, from network data to prediction. Ecol. Appl. 2011, 21, 1523–1536. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Chen, N.; Zhang, W.; Pu, F.; Du, C. Semantic integration of wireless sensor networks into open geospatial consortium sensor observation service to access and share environmental monitoring systems. IET Softw. 2016, 10, 45–53. [Google Scholar]
- Lausch, A.; Schmidt, A.; Tischendorf, L. Data mining and linked open data—New perspectives for data analysis in environmental research. Ecol. Model. 2015, 295, 5–17. [Google Scholar] [CrossRef]
- Wehr, A.; Lohr, U. Airborne laser scanning—An introduction and overview. ISPRS J. Photogramm. Remote Sens. 1999, 54, 68–82. [Google Scholar] [CrossRef]
- Popescu, S.C. LiDAR Remote Sensing. Advances in Environmental Remote Sensing: Sensors, Algorithms, and Applications; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- Geoscience Laser Altimeter System (GLAS). Available online: http://attic.gsfc.nasa.gov/glas (accessed on 3 January 2017).
- Koch, B.; Kattenborn, T.; Straub, C.; Vauhkonen, J. Segmentation of forest to tree objects. In Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer Science+Business Media: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Wagner, W.; Ullrich, A.; Melzer, T. From Single-Pulse to Full-Waveform Airborne Laser Scanners: Potential and Practical Challenges. Available online: http://www.isprs.org/proceedings/XXXV/congress/comm3/papers/267.pdf (accessed on 2 February 2017).
- Anderson, K.; Hancock, S.; Disney, M.; Gaston, K.J. Is waveform worth it? A comparison of LiDAR approaches for vegetation and landscape characterization. Remote Sens. Ecol. Conserv. 2016, 2, 5–15. [Google Scholar] [CrossRef]
- Reitberger, J.; Krzystek, P.; Stilla, U. Analysis of full waveform LIDAR data for the classification of deciduous and coniferous trees. Int. J. Remote Sens. 2008, 29, 1407–1431. [Google Scholar] [CrossRef]
- Schutz, B.E.; Zwally, H.J.; Shuman, C.A.; Hancock, D.; DiMarzio, J.P. Overview of the ICESat mission. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.J.; Keller, M.; Cohen, W.B.; Carabajal, C.C.; Del Bom Espirito-Santo, F.; Hunter, M.O.; de Oliveira, R. Estimates of forest canopy height and aboveground biomass using ICESat. Geophys. Res. Lett. 2005, 32, 1–4. [Google Scholar] [CrossRef]
- Heurich, M.; Kennel, E. Evaluation of tree height determination from airborne laser scanner data over the richly structured natural forests of the Bavarian Forest National Park. Photogramm. Fernerkungung Geoinf. 2008, 1, 253–263. [Google Scholar]
- Magnussen, S.; Boudewyn, P. Derivations of stand heights from airborne laser scanner data with canopy-based quantile estimators. Can. J. For. Res. 1998, 28, 1016–1031. [Google Scholar] [CrossRef]
- Nilsson, M. Estimation of tree heights and stand volume using an airborne LiDAR system. Remote Sens. Environ. 1996, 56, 1–7. [Google Scholar] [CrossRef]
- Polewski, P.; Yao, W.; Heurich, M.; Krzystek, P.; Stilla, U. Detection of fallen trees in ALS point clouds using a Normalized Cut approach trained by simulation. ISPRS J. Photogramm. Remote Sens. 2015, 105, 252–271. [Google Scholar] [CrossRef]
- Mücke, W.; Deák, B.; Schroiff, A.; Hollaus, M.; Pfeifer, N. Detection of fallen trees in forested areas using small footprint airborne laser scanning data. Can. J. Remote Sens. 2013, 39, S32–S40. [Google Scholar] [CrossRef]
- Jonsson, B.G.; Kruys, N.; Ranius, T. Ecology of species living on dead wood—Lessons for dead wood management. Silva Fenn. 2005, 39, 289–309. [Google Scholar] [CrossRef]
- Woodall, C.W.; Heath, L.S.; Smith, J.E. National inventories of down and dead woody material forest carbon stocks in the United States: Challenges and opportunities. For. Ecol. Manag. 2008, 256, 221–228. [Google Scholar] [CrossRef]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ. 2002, 80, 88–99. [Google Scholar] [CrossRef]
- Maltamo, M.; Eerikäinen, K.; Packalén, P.; Hyyppä, J. Estimation of stem volume using laser scanning-based canopy height metrics. Forestry 2006, 79, 217–229. [Google Scholar] [CrossRef]
- Næsset, E. Airborne laser scanning as a method in operational forest inventory: Status of accuracy assessments accomplished in Scandinavia. Scand. J. For. Res. 2007, 22, 433–442. [Google Scholar] [CrossRef]
- Holmgren, J. Prediction of tree height, basal area and stem volume in forest stands using airborne laser scanning. Scand. J. For. Res. 2004, 19, 543–553. [Google Scholar] [CrossRef]
- Maltamo, M.; Packalen, P. Species-specific management inventory in Finland. In Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer Science+Business Media: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Heurich, M.; Thoma, F. Estimation of forestry stand parameters using laser scanning data in temperate, structurally rich natural European beech (Fagus sylvatica) and Norway spruce (Picea abies) forests. Forestry 2008, 81, 645–661. [Google Scholar] [CrossRef]
- Latifi, H.; Nothdurft, A.; Koch, B. Non-parametric prediction and mapping of standing timber volume and biomass in a temperate forest: Application of multiple optical/LiDAR-derived predictors. Forestry 2010, 83, 395–407. [Google Scholar] [CrossRef]
- Latifi, H.; Fassnacht, F.E.; Müller, J.; Tharani, A.; Dech, S.; Heurich, M. Forest inventories by LiDAR data: A comparison of single tree segmentation and metric-based methods for inventories of a heterogeneous temperate forest. Int. J. Appl. Earth Obs. Geoinf. 2015, 42, 162–174. [Google Scholar] [CrossRef]
- Morsdorf, F.; Kötz, B.; Meier, E.; Itten, K.I.; Allgöwer, B. Estimation of LAI and fractional cover from small footprint airborne laser scanning data based on gap fraction. Remote Sens. Environ. 2006, 104, 50–61. [Google Scholar] [CrossRef]
- Yao, W.; Krzystek, P.; Heurich, M. Tree species classification and estimation of stem volume and DBH based on single tree extraction by exploiting airborne full-waveform LiDAR data. Remote Sens. Environ. 2012, 123, 368–380. [Google Scholar] [CrossRef]
- Heinzel, J.; Koch, B. Investigating multiple data sources for tree species classification in temperate forest and use for single tree delineation. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 101–110. [Google Scholar] [CrossRef]
- Koenig, K.; Höfle, B. Full-Waveform airborne laser scanning in vegetation studies—A review of point cloud and waveform features for tree species classification. Forests 2016, 7. [Google Scholar] [CrossRef]
- Yao, W.; Krzystek, P.; Heurich, M.; Forest, B.; Park, N. Identifying standing dead trees in forest areas based on 3D Single tree detection from full waveform LiDAR data. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 5 August–1 September 2012.
- Polewski, P.; Yao, W.; Heurich, M.; Krzystek, P.; Stilla, U. Combining Active and Semisupervised Learning of Remote Sensing Data Within a Renyi Entropy Regularization Framework. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2910–2922. [Google Scholar] [CrossRef]
- Pesonen, A.; Maltamo, M.; Eerikäinen, K.; Packalèn, P. Airborne laser scanning-based prediction of coarse woody debris volumes in a conservation area. For. Ecol. Manag. 2008, 255, 3288–3296. [Google Scholar] [CrossRef]
- Kim, Y.; Yang, Z.; Cohen, W.B.; Pflugmacher, D.; Lauver, C.L.; Vankat, J.L. Distinguishing between live and dead standing tree biomass on the North Rim of Grand Canyon National Park, USA using small-footprint LIDAR data. Remote Sens. Environ. 2009, 113, 2499–2510. [Google Scholar] [CrossRef]
- Bright, B.C.; Hudak, A.T.; Kennedy, R.E.; Meddens, A.J.H. Landsat time series and LiDAR as predictors of live and dead basal area across five bark beetle-affected forests. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3440–3452. [Google Scholar] [CrossRef]
- Amiri, N.; Yao, W.; Heurich, M.; Krzystek, P.; Skidmore, A.K. Estimation of regeneration coverage in a temperate forest by 3D segmentation using airborne laser scanning data. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 252–262. [Google Scholar] [CrossRef]
- Maltamo, M.; Gobakken, T. Predicting tree diameter distributions. In Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Maltamo, M., Næsset, E., Vauhkonen, J., Eds.; Springer science+Business Media: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Van Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LiDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- Solberg, S.; Brunner, A.; Hanssen, K.H.; Lange, H.; Næsset, E.; Rautiainen, M.; Stenberg, P. Mapping LAI in a Norway spruce forest using airborne laser scanning. Remote Sens. Environ. 2009, 113, 2317–2327. [Google Scholar] [CrossRef]
- MacArthur, R.H. Environmental factors affecting bird species diversity. Am. Nat. 1964, 98, 387–397. [Google Scholar] [CrossRef]
- Gao, T.; Hedblom, M.; Emilsson, T.; Nielsen, A.B. The role of forest stand structure as biodiversity indicator. For. Ecol. Manag. 2014, 330, 82–93. [Google Scholar] [CrossRef]
- Müller, J.; Moning, C.; Bässler, C.; Heurich, M.; Brandl, R. Using airborne laser scanning to model potential abundance and assemblages of forest passerines. Basic Appl. Ecol. 2009, 10, 671–681. [Google Scholar] [CrossRef]
- Zimble, D.A.; Evans, D.L.; Carlson, G.C.; Parker, R.C.; Grado, S.C.; Gerard, P.D. Characterizing vertical forest structure using small-footprint airborne LiDAR. Remote Sens. Environ. 2003, 87, 171–182. [Google Scholar] [CrossRef]
- Vogeler, J.C.; Hudak, A.T.; Vierling, L.A.; Evans, J.; Green, P.; Vierling, K.T. Terrain and vegetation structural influences on local avian species richness in two mixed-conifer forests. Remote Sens. Environ. 2014, 147, 13–22. [Google Scholar] [CrossRef]
- Ewald, M.; Dupke, C.; Heurich, M.; Müller, J.; Reineking, B. LiDAR remote sensing of forest structure and GPS telemetry data provide insights on winter habitat selection of european roe deer. Forests 2014, 5, 1374–1390. [Google Scholar] [CrossRef]
- Ole Ørka, H.; Gobakken, T.; Næsset, E. Predicting Attributes of Regeneration Forests Using Airborne Laser Scanning. Can. J. Remote Sens. 2016, 42, 541–553. [Google Scholar] [CrossRef]
- Amiri, N.; Yao, W.; Heurich, M.; Krzystek, P. Regeneration detection by 3D segmentation in a temperate forest using airborne full waveform LiDAR data. In Proceedings of the SilviLaser 2015: 14th Conference on LiDAR Applications for Assessing and Managing Forest Ecosystems, La Grande Motte, France, 28–30 September 2015.
- Andersen, H.E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Skowronski, N.S.; Clark, K.L.; Duveneck, M.; Hom, J. Three-dimensional canopy fuel loading predicted using upward and downward sensing LiDAR systems. Remote Sens. Environ. 2011, 115, 703–714. [Google Scholar] [CrossRef]
- Eitel, J.U.H.; Höfle, B.; Vierling, L.A.; Abellán, A.; Asner, G.P.; Deems, J.S.; Glennie, C.L.; Joerg, P.C.; LeWinter, A.L.; Magney, T.S.; et al. Beyond 3-D: The new spectrum of LiDAR applications for earth and ecological sciences. Remote Sens. Environ. 2016, 186, 372–392. [Google Scholar] [CrossRef]
- Stysley, P.R.; Coyle, D.B.; Kay, R.B.; Frederickson, R.; Poulios, D.; Cory, K.; Clarke, G. Long term performance of the High Output Maximum Efficiency Resonator (HOMER) laser for NASA’s Global Ecosystem Dynamics Investigation (GEDI) LiDAR. Opt. Laser Technol. 2015, 68, 67–72. [Google Scholar] [CrossRef]
- Thenkabail, P.S. Hyperspectral Remote Sensing of Vegetation; CRC Press Inc.: Boca Raton, FL, USA, 2011. [Google Scholar]
- Thenkabail, P.S.; Enclona, E.A.; Ashton, M.S.; Legg, C.; De Dieu, M.J. Hyperion, IKONOS, ALI, and ETM+ sensors in the study of African rainforests. Remote Sens. Environ. 2004, 90, 23–43. [Google Scholar] [CrossRef]
- Lausch, A.; Bannehr, L.; Beckmann, M.; Boehm, C.; Feilhauer, H.; Hacker, J.M.; Heurich, M.; Jung, A.; Klenke, R.; Neumann, C.; et al. Linking Earth Observation and taxonomic, structural and functional biodiversity: Local to ecosystem perspectives. Indic. Ecol. 2016, 70, 317–339. [Google Scholar] [CrossRef]
- Kuenzer, C.; Bluemel, A.; Gebhardt, S.; Quoc, T.V.; Dech, S. Remote Sensing of Mangrove Ecosystems: A Review. Remote Sens. 2011, 3, 878–928. [Google Scholar] [CrossRef]
- Joshi, N.; Mitchard, E.T.A.; Woo, N.; Torres, J.; Moll-rocek, J.; Ehammer, A. Mapping dynamics of deforestation and forest degradation in tropical forests using radar satellite data. Environ. Res. Lett. 2015, 10. [Google Scholar] [CrossRef]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.R.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.T.A.; et al. A review of the application of optical and radar remote sensing data fusion to land use mapping and monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef]
- Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. Accuracy of an {IFSAR-derived} digital terrain model under a conifer forest canopy. Can. J. Remote Sens. 2005, 31, 283–288. [Google Scholar] [CrossRef]
- Heurich, M. Automatic recognition and measurement of single trees based on data from airborne laser scanning over the richly structured natural forests of the Bavarian Forest National Park. For. Ecol. Manag. 2008, 255, 2416–2433. [Google Scholar] [CrossRef]
- Meng, X.; Currit, N.; Zhao, K. Ground filtering algorithms for airborne LiDAR data: A review of critical issues. Remote Sens. 2010, 2, 833–860. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Latifi, H.; Fassnacht, F.E.; Hartig, F.; Berger, C.; Hernández, J.; Corvalán, P.; Koch, B. Stratified aboveground forest biomass estimation by remote sensing data. Int. J. Appl. Earth Obs. Geoinf. 2015, 38, 229–241. [Google Scholar] [CrossRef]
- Persson, A.; Holmgren, J.; Söderman, U. Detecting and measuring individual trees using an airborne laser scanner. Photogramm. Eng. Remote Sens. 2002, 68, 925–932. [Google Scholar]
- Morsdorf, F.; Meier, E.; Kötz, B.; Itten, K.I.; Dobbertin, M.; Allgöwer, B. LIDAR-based geometric reconstruction of boreal type forest stands at single tree level for forest and wildland fire management. Remote Sens. Environ. 2004, 92, 353–362. [Google Scholar] [CrossRef]
- Henderson, F.M.; Lewis, A.J. Principles and Applications of Imaging Radar—Manual of Remote Sensing; Wiley: Hoboken, NJ, USA, 1998. [Google Scholar]
- Ulaby, F.; Held, D.; Donson, M.; McDonald, K.; Senior, T.A. Relating Polaization Phase Difference of SAR Signals to Scene Properties. IEEE Trans. Geosci. Remote Sens. 1987, GE-25, 83–92. [Google Scholar] [CrossRef]
- Balzter, H. Forest mapping and monitoring with interferometric synthetic aperture radar (InSAR). Prog. Phys. Geogr. 2009, 25, 159–177. [Google Scholar] [CrossRef]
- Hamlyn, G.; Jones, R.A.V. Remote Sensing of Vegetation; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Peake, W.; Oliver, T. The Response of Terrestrial Surface at Microwave Frequencies; Defense Technical Information Center: Fort Belvoir, VA, USA, 1971. [Google Scholar]
- Van Zyl, J.J. Unsupervised classification of scattering behavior using radar polarimetry data. IEEE Trans. Geosci. Remote Sens. 1989, 27, 36–45. [Google Scholar] [CrossRef]
- Claude, S.R.; Pottier, E. A Review of Target Decomposition Theorems in Radar Polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef]
- Touzi, R. Target scattering decomposition in terms of roll-invariant target parameters. IEEE Trans. Geosci. Remote Sens. 2007, 45, 73–84. [Google Scholar] [CrossRef]
- Kellndorfer, J.M.; Walker, W.S.; Dobson, M.C.; Vona, M.; Clutter, M. Vegetation height derivation from Shuttle Radar Topography Mission data in southeast Georgia, USA. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004.
- Tighe, M. Empirical Assessment of Multi-Wavelength Synthetic Aperture Radar for Land Cover and Canopy Height Estimation. Ph.D. Thesis, Carleton University, Ottawa, ON, Canada, 2012. [Google Scholar]
- Neeff, T.; Dutra, L.V.; Dos Santos, J.R.; Da Costa Freitas, C.; Araujo, L.S. Tropical forest measurement by interferometric height modeling and P-band radar backscatter. For. Sci. 2005, 51, 585–594. [Google Scholar]
- Balzter, H.; Rowland, C.S.; Saich, P. Forest canopy height and carbon estimation at Monks Wood National Nature Reserve, UK, using dual-wavelength SAR interferometry. Remote Sens. Environ. 2007, 108, 224–239. [Google Scholar] [CrossRef]
- Andersen, H.-E.; McGaughey, R.J.; Reutebuch, S.E. Assessing the influence of flight parameters, interferometric processing, slope and canopy density on the accuracy of X-band IFSAR-derived forest canopy height models. Int. J. Remote Sens. 2008, 29, 1495–1510. [Google Scholar] [CrossRef]
- Tighe, M.L.; Balzter, H.; McNairn, H. Comparison of X/C-HH InSAR and L-PolInSAR for canopy height estimation in a lodgepole pine forest. In Proceedings of the 4th International Workshop on Science and Applications of SAR Polarimetry and Polarimetric Interferometry, Frascati, Italy, 26–30 January 2009.
- Woodhouse, I.H. Introduction to Microwave Remote Sensing; Taylor and Francis Group: Boca Raton, FL, USA, 2006. [Google Scholar]
- Touzi, R.; Lopes, A. The principle of speckle filtering in polarimetric SAR imagery. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1110–1114. [Google Scholar] [CrossRef]
- Lee, J.S.; Grunes, M.R.; De Grandi, G. Polarimetric SAR speckle filtering and its impact on classification. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Singapore, 3–8 August 1997.
- Lu, D. The potential and challenge of remote sensing-based biomass estimation. Int. J. Remote Sens. 2006, 27, 1297–1328. [Google Scholar] [CrossRef]
- Lutz, D.A.; Allen, R.A.W.; Shugart, H.H. Remote sensing of boreal forest biophysical and inventory parameters: A review. Can. J. Remote Sens. 2008, 34, S286–S313. [Google Scholar] [CrossRef]
- Koch, B. Status and future of laser scanning, synthetic aperture radar and hyperspectral remote sensing data for forest biomass assessment. ISPRS J. Photogramm. Remote Sens. 2010, 65, 581–590. [Google Scholar] [CrossRef]
- Timothy, D.; Onisimo, M.; Cletah, S.; Adelabu, S.; Tsitsi, B. Remote sensing of aboveground forest biomass: A review. Trop. Ecol. 2016, 57, 125–132. [Google Scholar]
- Assal, T.J.; Anderson, P.J.; Sibold, J. Spatial and temporal trends of drought effects in a heterogeneous semi-arid forest ecosystem. For. Ecol. Manag. 2016, 365, 137–151. [Google Scholar] [CrossRef]
- Luckman, A.; Baker, J.; Kuplich, T.M.; Corina da Costa, F.Y.; Alejandro, C.F. A study of the relationship between radar backscatter and regenerating tropical forest biomass for spaceborne SAR instruments. Remote Sens. Environ. 1997, 60, 1–13. [Google Scholar] [CrossRef]
- Lucas, R.M.; Cronin, N.; Lee, A.; Moghaddam, M.; Witte, C.; Tickle, P. Empirical relationships between AIRSAR backscatter and LiDAR-derived forest biomass, Queensland, Australia. Remote Sens. Environ. 2006, 100, 407–425. [Google Scholar] [CrossRef]
- Le Toan, T.; Quegan, S.; Davidson, M.W.J.; Balzter, H.; Paillou, P.; Papathanassiou, K.; Plummer, S.; Rocca, F.; Saatchi, S.; Shugart, H.; et al. The BIOMASS mission: Mapping global forest biomass to better understand the terrestrial carbon cycle. Remote Sens. Environ. 2011, 115, 2850–2860. [Google Scholar] [CrossRef]
- Rignot, E.; Salas, W.A.; Skole, D.L. Mapping deforestation and secondary growth in Rondonia, Brazil, using imaging radar and thematic mapper data. Remote Sens. Environ. 1997, 59, 167–179. [Google Scholar] [CrossRef]
- Van der Sanden, J.J.; Hoekman, D.H. Potential of Airborne Radar To Support the Assessment of Land Cover in a Tropical Rain Forest Environment. Remote Sens. Environ. 1999, 68, 26–40. [Google Scholar] [CrossRef]
- Thapa, R.B.; Shimada, M.; Watanabe, M.; Motohka, T.; Shiraishi, T. The tropical forest in south east Asia: Monitoring and scenario modeling using synthetic aperture radar data. Appl. Geogr. 2013, 41, 168–178. [Google Scholar] [CrossRef]
- Häme, T.; Rauste, Y.; Antropov, O.; Ahola, H.A.; Kilpi, J. Improved Mapping of Tropical Forests With Optical Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 92–101. [Google Scholar] [CrossRef]
- Santos, J.R.; Freitas, C.C.; Araujo, L.S.; Dutra, L.V.; Mura, J.C.; Gama, F.F.; Soler, L.S.; Sant, A.; Anna, S.J.S. Airborne P-band SAR applied to the aboveground biomass studies in the Brazilian tropical rainforest. Remote Sens. Environ. 2003, 87, 482–493. [Google Scholar] [CrossRef]
- Foody, G.M.; Green, R.M.; Lucas, R.M.; Curran, P.J.; Honzak, M.; Do Amaral, I. Observations on the relationship between SIR-C radar backscatter and the biomass of regenerating tropical forests. Int. J. Remote Sens. 1997, 18, 687–694. [Google Scholar] [CrossRef]
- Englhart, S.; Keuck, V.; Siegert, F. Aboveground biomass retrieval in tropical forests—The potential of combined X- and L-band SAR data use. Remote Sens. Environ. 2011, 115, 1260–1271. [Google Scholar] [CrossRef]
- Mitchard, E.T.A.; Saatchi, S.S.; Lewis, S.L.; Feldpausch, T.R.; Woodhouse, I.H.; Sonké, B.; Rowland, C.; Meir, P. Measuring biomass changes due to woody encroachment and deforestation/degradation in a forest-savanna boundary region of central Africa using multi-temporal L-band radar backscatter. Remote Sens. Environ. 2011, 115, 2861–2873. [Google Scholar] [CrossRef]
- Simard, M.; Rivera-Monroy, V.H.; Mancera-Pineda, J.E.; Castañeda-Moya, E.; Twilley, R.R. A systematic method for 3D mapping of mangrove forests based on Shuttle Radar Topography Mission elevation data, ICEsat/GLAS waveforms and field data: Application to Ciénaga Grande de Santa Marta, Colombia. Remote Sens. Environ. 2008, 112, 2131–2144. [Google Scholar] [CrossRef]
- Manninen, T.; Stenberg, P.; Rautiainen, M.; Voipio, P. Leaf area index estimation of boreal and subarctic forests Using VV/HH ENVISAT/ASAR data of various swaths. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3899–3909. [Google Scholar] [CrossRef]
- Varghese, A.O.; Suryavanshi, A.; Joshi, A.K. Analysis of different polarimetric target decompositionmethods in forest density classification using C band SAR data. Int. J. Remote Sens. 2016, 37, 694–709. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Bourgeauchavez, L.L.; French, N.H.F.; Harrell, P.; Christensen, N.L. Initial Observations on Using Sar to Monitor Wildfire Scars in Boreal Forests. Int. J. Remote Sens. 1992, 13, 3495–3501. [Google Scholar] [CrossRef]
- Chavez, L.L.B.; Kasischke, E.S.; French, N.H. F.; Szeto, L.H.; Kherkher, C.M. Using ERS-1 SAR imagery to monitor variations in burn severity in\nan Alaskan fire-disturbed boreal forest ecosystem. In Proceedings of the International Geoscience and Remote Sensing Symposium—Surface and Atmospheric Remote Sensing: Technologies, Data Analysis, and Interpretation, Pasadena, CA, USA, 8–12 August 1994.
- Tanase, M.A.; Kennedy, R.; Aponte, C. Radar Burn Ratio for fire severity estimation at canopy level: An example for temperate forests. Remote Sens. Environ. 2015, 170, 14–31. [Google Scholar] [CrossRef]
- Martins, F.; da, S.R.V.; dos Santos, J.R.; Galvão, L.S.; Xaud, H.A.M. Sensitivity of ALOS/PALSAR imagery to forest degradation by fire in northern Amazon. Int. J. Appl. Earth Obs. Geoinf. 2016, 49, 163–174. [Google Scholar] [CrossRef]
- Lang, M.W.; Townsend, P.A.; Kasischke, E.S. Influence of incidence angle on detecting flooded forests using C-HH synthetic aperture radar data. Remote Sens. Environ. 2008, 112, 3898–3907. [Google Scholar] [CrossRef]
- Kim, J.W.; Lu, Z.; Lee, H.; Shum, C.K.; Swarzenski, C.M.; Doyle, T.W.; Baek, S.H. Integrated analysis of PALSAR/Radarsat-1 InSAR and ENVISAT altimeter data for mapping of absolute water level changes in Louisiana wetlands. Remote Sens. Environ. 2009, 113, 2356–2365. [Google Scholar] [CrossRef]
- Kuenzer, C.; Ottinger, M.; Wegmann, M.; Guo, H. Earth observation satellite sensors for biodiversity monitoring: Potentials and bottlenecks. Int. J. Remote Sens. 2014, 35, 6599–6647. [Google Scholar] [CrossRef]
- Kim, M.H.; Rushmeier, H.; Dorsey, J.; Harvey, T.A.; Prum, R.O.; Kittle, D.S.; Brady, D.J. 3D imaging spectroscopy for measuring hyperspectral patterns on solid objects. ACM Trans. Graph. 2012, 31, 1–11. [Google Scholar] [CrossRef]
- Kim, M.H. Foundations and Applications of 3D Imaging. Theory and Applications of Smart Cameras; Springer: Berlin, Germany, 2016. [Google Scholar]
- Lagouarde, J.P.; Ballans, H.; Moreau, P.; Guyon, D.; Coraboeuf, D. Experimental study of brightness surface temperature angular variations of maritime pine (Pinus pinaster) stands. Remote Sens. Environ. 2000, 72, 17–34. [Google Scholar] [CrossRef]
- Duffour, C.; Lagouarde, J.P.; Olioso, A.; Demarty, J.; Roujean, J.L. Driving factors of the directional variability of thermal infrared signal in temperate regions. Remote Sens. Environ. 2016, 177, 248–264. [Google Scholar] [CrossRef]
- Giuliani, R.; Magnanini, E.; Flore, J.A. Potential Use of Infrared Thermometry For The Detection Of Water Deficit In Apple And Peach Orchards. Acta Hortic. 2001, 557, 399–406. [Google Scholar] [CrossRef]
- Luquet, D.; Vidal, A.; Dauzat, J.; Bégué, A.; Olioso, A.; Clouvel, P. Using directional TIR measurements and 3D simulations to assess the limitations and opportunities of water stress indices. Remote Sens. Environ. 2004, 90, 53–62. [Google Scholar] [CrossRef]
- Guy Séguin, D.G. RADARSAT constellation mission overview. In Proceedings of the ASTRO 2010, 15th CASI (Canadian Aeronautics and Space Institute) Conference, Toronto, ON, Canada, 4–6 May 2010.
- Pang, Y.; Li, Z.; Ju, H.; Lu, H.; Jia, W.; Si, L.; Guo, Y.; Liu, Q.; Li, S.; Liu, L.; et al. LiCHy: The CAF’s LiDAR, CCD and hyperspectral integrated airborne observation system. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- HyspIRI Mission (HyspIRI). Available online: http://hyspiri.jpl.nasa.gov/ (accessed on 3 January 2017).
- Lee, C.M.; Cable, M.L.; Hook, S.J.; Green, R.O.; Ustin, S.L.; Mandl, D.J.; Middleton, E.M. An introduction to the NASA Hyperspectral InfraRed Imager (HyspIRI) mission and preparatory activities. Remote Sens. Environ. 2015, 167, 6–19. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E.; Suhaili, A. Bin sources of canopy chemical and spectral diversity in lowland Bornean forest. Ecosystems 2012, 15, 504–517. [Google Scholar] [CrossRef]
- Asner, G.P.; Martin, R.E.; Tupayachi, R.; Anderson, C.B.; Sinca, F.; Jiménez, L.C.; Martinez, P. Amazonian functional diversity from forest canopy chemical assembly. Proc. Natl. Acad. Sci. USA 2014, 111, 5604–5609. [Google Scholar] [CrossRef] [PubMed]
- Ustin, S.L. Remote sensing of canopy chemistry. Proc. Natl. Acad. Sci. USA 2013, 110, 804–805. [Google Scholar] [CrossRef] [PubMed]
- Feret, J.B.; Asner, P.G. Tree species discrimination in tropical forests using airborne imaging spectroscopy. IEEE Trans. Geosci. Remote Sens. 2013, 51, 73–84. [Google Scholar] [CrossRef]
- Richter, R.; Reu, B.; Wirth, C.; Doktor, D. The use of airborne hyperspectral data for tree species classification in a species-rich Central European forest area. Int. J. Appl. Earth Obs. Geoinf. 2016, 52, 464–474. [Google Scholar] [CrossRef]
- Möckel, T.; Löfgren, O.; Prentice, H.C.; Eklundh, L.; Hall, K. Airborne hyperspectral data predict Ellenberg indicator values for nutrient and moisture availability in dry grazed grasslands within a local agricultural landscape. Ecol. Indic. 2016, 66, 503–516. [Google Scholar] [CrossRef]
- Schmidtlein, S.; Feilhauer, H.; Bruelheide, H. Mapping plant strategy types using remote sensing. J. Veg. Sci. 2012, 23, 395–405. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Ghosh, A.; Joshi, P.K.; Koch, B. Assessing the potential of hyperspectral imagery to map bark beetle-induced tree mortality. Remote Sens. Environ. 2014, 140, 533–548. [Google Scholar] [CrossRef]
- Wulder, M.A.; Dymond, C.C.; White, J.C.; Leckie, D.G.; Carroll, A.L. Surveying mountain pine beetle damage of forests: A review of remote sensing opportunities. For. Ecol. Manag. 2006, 221, 27–41. [Google Scholar] [CrossRef]
- Fassnacht, F.E.; Latifi, H.; Stereńczak, K.; Modzelewska, A.; Lefsky, M.; Waser, L.T.; Straub, C.; Ghosh, A. Review of studies on tree species classification from remotely sensed data. Remote Sens. Environ. 2016, 186, 64–87. [Google Scholar] [CrossRef]
- Immitzer, M.; Atzberger, C.; Koukal, T. Tree species classification with Random forest using very high spatial resolution 8-band WorldView-2 satellite data. Remote Sens. 2012, 4, 2661–2693. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef]
- Zhou, G.; Li, C.; Cheng, P. Unmanned aerial vehicle (UAV) real-time video registration for forest fire monitoring. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Seoul, South Korea, 25–29 July 2005.
- Sheng, H.; Chao, H.; Coopmans, C.; Han, J.; McKee, M.; Chen, Y. Low-cost UAV-based thermal infrared remote sensing: Platform, calibration and applications. In Proceedings of the 2010 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, Qingdao, China, 15–17 July 2010.
- Nebiker, S.; Annen, A.; Scherrer, M.; Oesch, D. A light-weight multispectral sensor for micro UAV—Opportunities for very high resolution airborne remote sensing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, XXXVII, 1193–1200. [Google Scholar]
- Getzin, S.; Nuske, R.S.; Wiegand, K. Using unmanned aerial vehicles (UAV) to quantify spatial gap patterns in forests. Remote Sens. 2014, 6, 6988–7004. [Google Scholar] [CrossRef]
- Mäkynen, J.; Saari, H.; Holmlund, C.; Mannila, R.; Antila, T. Multi- and hyperspectral UAV imaging system for forest and agriculture applications. In Proceedings of the SPIE Defense, Security, and Sensing, Baltimore, MD, USA, 23 April 2012.
- Gamba, P.; Chanussot, J. Foreword to the Special Issue on Data Fusion. IEEE Trans. Geosci. Remote Sens. 2008, 46, 1283–1288. [Google Scholar] [CrossRef]
- Ghassemian, H. A review of remote sensing image fusion methods. Inf. Fusion 2016, 32, 75–89. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the landsat and MODIS surface reflectance: Predicting daily landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar]
- Hilker, T.; Wulder, M.A.; Coops, N.C.; Seitz, N.; White, J.C.; Gao, F.; Masek, J.G.; Stenhouse, G. Generation of dense time series synthetic Landsat data through data blending with MODIS using a spatial and temporal adaptive reflectance fusion model. Remote Sens. Environ. 2009, 113, 1988–1999. [Google Scholar] [CrossRef]
- Cosmopoulos, P.; King, D.J. Temporal analysis of forest structural condition at an acid mine site using multispectral digital camera imagery. Int. J. Remote Sens. 2004, 25, 2259–2275. [Google Scholar] [CrossRef]
- King, D.J.; Olthof, I.; Pellikka, P.K.E.; Seed, E.D.; Butson, C. Modelling and mapping damage to forests from an ice storm using remote sensing and environmental data. Nat. Hazards 2005, 35, 321–342. [Google Scholar] [CrossRef]
- Song, C. Optical remote sensing of forest leaf area index and biomass. Prog. Phys. Geogr. 2013, 37, 98–113. [Google Scholar] [CrossRef]
- Lévesque, J.; King, D.J. Airborne digital camera image semivariance for evaluation of forest structural damage at an acid mine site. Remote Sens. Environ. 1999, 68, 112–124. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Millard, K.; Richardson, M.C. On the importance of training data sample selection in RF classification: A case study in peatland ecosystem mapping. Remote Sens. 2015, 7, 1–26. [Google Scholar] [CrossRef]
- Zhu, X.; Liu, D. Accurate mapping of forest types using dense seasonal landsat time-series. ISPRS J. Photogramm. Remote Sens. 2014, 96, 1–11. [Google Scholar] [CrossRef]
- Goel, N.S. Models of vegetation canopy reflectance and their use in estimation of biophysical parameters from reflectance data. Remote Sens. Rev. 1988, 4, 1–212. [Google Scholar] [CrossRef]
- Li, X.; Strahler, A. Geometric-Optical Modeling of a Conifer Forest Canopy. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 705–721. [Google Scholar] [CrossRef]
- Omari, K.; White, H.P.; Staenz, K. King Retrieval of Forest Canopy Parameters by Inversion of the PROFLAIR Leaf-Canopy Reflectance Model Using the LUT Approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 715–723. [Google Scholar] [CrossRef]
- Knyazikhin, Y.; Martonchik, J.V.; Myneni, R.B.; Diner, D.J.; Running, S.W. Synergistic algorithm for estimating vegetation canopy leaf area index and fraction of absorbed photosynthetically active radiation from MODIS and MISR data. J. Geophys. Res. Atmos. 1998, 103, 32257–32275. [Google Scholar] [CrossRef]
- Ganguly, S.; Nemani, R.R.; Zhang, G.; Hashimoto, H.; Milesi, C.; Michaelis, A.; Wang, W.; Votava, P.; Samanta, A.; Melton, F.; et al. Generating global Leaf Area Index from Landsat: Algorithm formulation and demonstration. Remote Sens. Environ. 2012, 122, 185–202. [Google Scholar] [CrossRef]
- Propastin, P.; Ibrom, A.; Knohl, A.; Erasmi, S. Effects of canopy photosynthesis saturation on the estimation of gross primary productivity from MODIS data in a tropical forest. Remote Sens. Environ. 2012, 121, 252–260. [Google Scholar] [CrossRef]
- Fang, H.; Liang, S. A hybrid inversion method for mapping leaf area index from MODIS data: Experiments and application to broadleaf and needleleaf canopies. Remote Sens. Environ. 2005, 94, 405–424. [Google Scholar] [CrossRef]
- Garestier, F.; Dubois-Fernandez, P.C.; Papathanassiou, K.P. Pine Forest Height Inversion Using Single-Pass X-Band PolInSAR Data. IEEE Trans. Geosci. Remote Sens. 2008, 46, 59–68. [Google Scholar] [CrossRef] [Green Version]
- Behera, M.D.; Tripathi, P.; Mishra, B.; Kumar, S.; Chitale, V.S.; Behera, S.K. Above-ground biomass and carbon estimates of Shorea robusta and Tectona grandis forests using QuadPOL ALOS PALSAR data. Adv. Space Res. 2016, 57, 552–561. [Google Scholar] [CrossRef]
- Wang, C.; Wang, L.; Fu, H.; Xie, Q.; Zhu, J. The impact of forest density on forest height inversion modeling from polarimetric InSAR data. Remote Sens. 2016, 8. [Google Scholar] [CrossRef]
- Rahman, M.M.; Csaplovics, E.; Koch, B. Satellite estimation of forest carbon using regression models. Int. J. Remote Sens. 2008, 29, 6917–6936. [Google Scholar] [CrossRef]
- Foody, G.M.; Boyd, D.S.; Cutler, M.E.J. Predictive relations of tropical forest biomass from Landsat TM data and their transferability between regions. Remote Sens. Environ. 2003, 85, 463–474. [Google Scholar] [CrossRef]
- Schlund, M.; von Poncet, F.; Kuntz, S.; Schmullius, C.; Hoekman, D.H. TanDEM-X data for aboveground biomass retrieval in a tropical peat swamp forest. Remote Sens. Environ. 2015, 158, 255–266. [Google Scholar] [CrossRef]
- Monnet, J.-M.; Chanussot, J.; Berger, F. Support Vector Regression for the Estimation of Forest Stand Parameters Using Airborne Laser Scanning. IEEE Geosci. Remote Sens. Lett. 2011, 8, 580–584. [Google Scholar] [CrossRef]
- Powell, J.; Kennedy, B.; White, P.; Bentz, B.; Logan, J.; Roberts, D. Mathematical elements of attack risk analysis for mountain pine beetles. J. Theor. Biol. 2000, 204, 601–620. [Google Scholar] [CrossRef] [PubMed]
- Cohen, W.B.; Maiersperger, T.K.; Gower, S.T.; Turner, D.P. An improved strategy for regression of biophysical variables and Landsat ETM+ data. Remote Sens. Environ. 2003, 84, 561–571. [Google Scholar] [CrossRef]
- Pasher, J.; King, D.J. Multivariate forest structure modelling and mapping using high resolution airborne imagery and topographic information. Remote Sens. Environ. 2010, 114, 1718–1732. [Google Scholar] [CrossRef]
- Pasher, J.; King, D.J. Development of a forest structure complexity index based on multispectral airborne remote sensing and topographic data. Can. J. For. Res. Can. Rech. For. 2011, 41, 44–58. [Google Scholar] [CrossRef]
- Czerwinski, C.J.; King, D.J.; Mitchell, S.W. Mapping forest growth and decline in a temperate mixed forest using temporal trend analysis of Landsat imagery, 1987–2010. Remote Sens. Environ. 2014, 141, 188–200. [Google Scholar] [CrossRef]
- Fuchs, H.; Magdon, P.; Kleinn, C.; Flessa, H. Estimating aboveground carbon in a catchment of the Siberian forest tundra: Combining satellite imagery and field inventory. Remote Sens. Environ. 2009, 113, 518–531. [Google Scholar] [CrossRef]
- Donmez, C.; Berberoglu, S.; Erdogan, M.A.; Tanriover, A.A.; Cilek, A. Response of the regression tree model to high resolution remote sensing data for predicting percent tree cover in a Mediterranean ecosystem. Environ. Monit. Assess. 2015, 187. [Google Scholar] [CrossRef] [PubMed]
- Gómez, C.; Wulder, M.A.; Montes, F.; Delgado, J.A. Modeling forest structural parameters in the Mediterranean pines of Central Spain using QuickBird-2 imagery and classification and regression tree analysis (CART). Remote Sens. 2012, 4, 135–159. [Google Scholar] [CrossRef]
- Knorn, M.M.; Moisen, G.G.; Healey, S.P.; Keeton, W.S.; Freeman, E.A.; Hostert, P. Evaluating the remote sensing and inventory-based estimation of biomass in the Western Carpathians. Remote Sens. 2011, 3, 1427–1446. [Google Scholar] [CrossRef]
- Li, C.; Song, J.; Wang, J. Modifying geometric-optical bidirectional reflectance model for direct inversion of forest canopy leaf area index. Remote Sens. 2015, 7, 11083–11104. [Google Scholar] [CrossRef]
- Soenen, S.A.; Peddle, D.R.; Hall, R.J.; Coburn, C.A.; Hall, F.G. Estimating aboveground forest biomass from canopy reflectance model inversion in mountainous terrain. Remote Sens. Environ. 2010, 114, 1325–1337. [Google Scholar] [CrossRef]
- Croft, H.; Chen, J.M.; Zhang, Y.; Simic, A.; Noland, T.L.; Nesbitt, N.; Arabian, J. Evaluating leaf chlorophyll content prediction from multispectral remote sensing data within a physically-based modelling framework. ISPRS J. Photogramm. Remote Sens. 2015, 102, 85–95. [Google Scholar] [CrossRef]
- Rautiainen, M.; Stenberg, P.; Nilson, T.; Kuusk, A.; Smolander, H. Application of a forest reflectance model in estimating leaf area index of Scots pine stands using Landsat-7 ETM reflectance data. Can. J. Remote Sens. 2003, 29, 314–323. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Holopainen, M.; Kankare, V.; Vastaranta, M.; Viitala, R. Geometrically explicit description of forest canopy based on 3D triangulations of airborne laser scanning data. Remote Sens. Environ. 2016, 173, 248–257. [Google Scholar] [CrossRef]
- Kattge, J.; Díaz, S.; Lavorel, S.; Prentice, I.C.; Leadley, P.; Bönisch, G.; Garnier, E.; Westoby, M.; Reich, P.B.; Wright, I.J.; et al. TRY - a global database of plant traits. Glob. Chang. Biol. 2011, 17, 2905–2935. [Google Scholar] [CrossRef] [Green Version]
- Kühn, I.; Durka, W.; Klotz, S.; Diversity, S.; Issue, S.; Invasion, P.; Sep, E. BiolFlor: A new plant-trait database as a tool for plant invasion ecology linked references are available on JSTOR for this article: database as a tool for plant invasion ecology. Divers. Distrib. 2004, 10, 363–365. [Google Scholar]
- De Vries, F.T.; Manning, P.; Tallowin, J.R.B.; Mortimer, S.R.; Pilgrim, E.S.; Harrison, K.A.; Hobbs, P.J.; Quirk, H.; Shipley, B.; Cornelissen, J.H.C.; et al. Abiotic drivers and plant traits explain landscape-scale patterns in soil microbial communities. Ecol. Lett. 2012, 15, 1230–1239. [Google Scholar] [CrossRef] [PubMed]
- Knapp, S.; Kühn, I.; Schweiger, O.; Klotz, S. Challenging urban species diversity: Contrasting phylogenetic patterns across plant functional groups in Germany. Ecol. Lett. 2008, 11, 1054–1064. [Google Scholar] [CrossRef] [PubMed]
- Knapp, S.; Kühn, I.; Bakker, J.P.; Kleyer, M.; Klotz, S.; Ozinga, W.A.; Poschlod, P.; Thompson, K.; Thuiller, W.; Römermann, C. How species traits and affinity to urban land use control large-scale species frequency. Divers. Distrib. 2009, 15, 533–546. [Google Scholar] [CrossRef]
- Ustin, S.L.; Gamon, J.A. Remote sensing of plant functional types. New Phytol. 2010, 186, 795–816. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
| Level/Scale | Responsible Body | Description | Resources/Links |
|---|---|---|---|
| Country level: Germany | Johann Heinrich von Thünen-Institute | Forest condition monitoring (FCM). | [6] |
| Level-I-Monitoring. | |||
| Frequency: Annual. | |||
| Compilation of national reports on forest conditions for Germany (FCA). FH assessed using systematic sample grid of permanent plots. | |||
| Federal Research Institute for countryside, forests and fisheries | Intensive monitoring. | ||
| Level-II Monitoring. | |||
| Frequency: Continuous. | |||
| 66 sites intensively monitored, partly through continual sampling of relevant ecosystem compartments in selected FES. | |||
| Federal Ministry for Food and Agriculture | National forest inventory. | [7] | |
| Level-III-Monitoring. | |||
| Frequency: Every 10 years. | |||
| Status and development of the forests of Germany derived from a sample based large scale forest inventory. | |||
| Country level: USA | United States Department of Agriculture(USDA) Forest Service | FH Monitoring (M). | [8] |
| Frequency: Annual. | |||
| National program designed to determine the status, changes, and trends in indicators of forest condition on an annual basis. | |||
| Country level: Canada | Canadian Forest Service (CFS) | National FHM Network. | [9] |
| Frequency: 5-years. | |||
| Established 1994 based on earlier Acid Rain Monitoring Network. Plot-based Bi-annual to 5-year repetition depending on the variables. | |||
| National Forest Inventory (NFI), Canada | National Forest Inventory. | [10] | |
| Frequency: 10-years. | |||
| Mixed plot and RS based. Includes inventory parameters + assessment of insect, disease, fire and other disturbance damage. | |||
| European level | United Nations Economic Commission for Europe (UNECE) | ICP. | [11] |
| Frequency: Annual. | |||
| International Co-operative Programme on the Assessment and Monitoring of Air Pollution Effects on Forest. Developed to standardise the recording of different FH indicators on three levels of intensity. | |||
| Global level | Food and Agriculture Organization of the United Nations (FAO) | Forest Resources Assessment. | [12] |
| Frequency: 5-years. | |||
| FH recorded by the FAO as part of the Forest Resources Assessment (FRA). Individual countries report their findings to the FAO, which then compiles a report. |
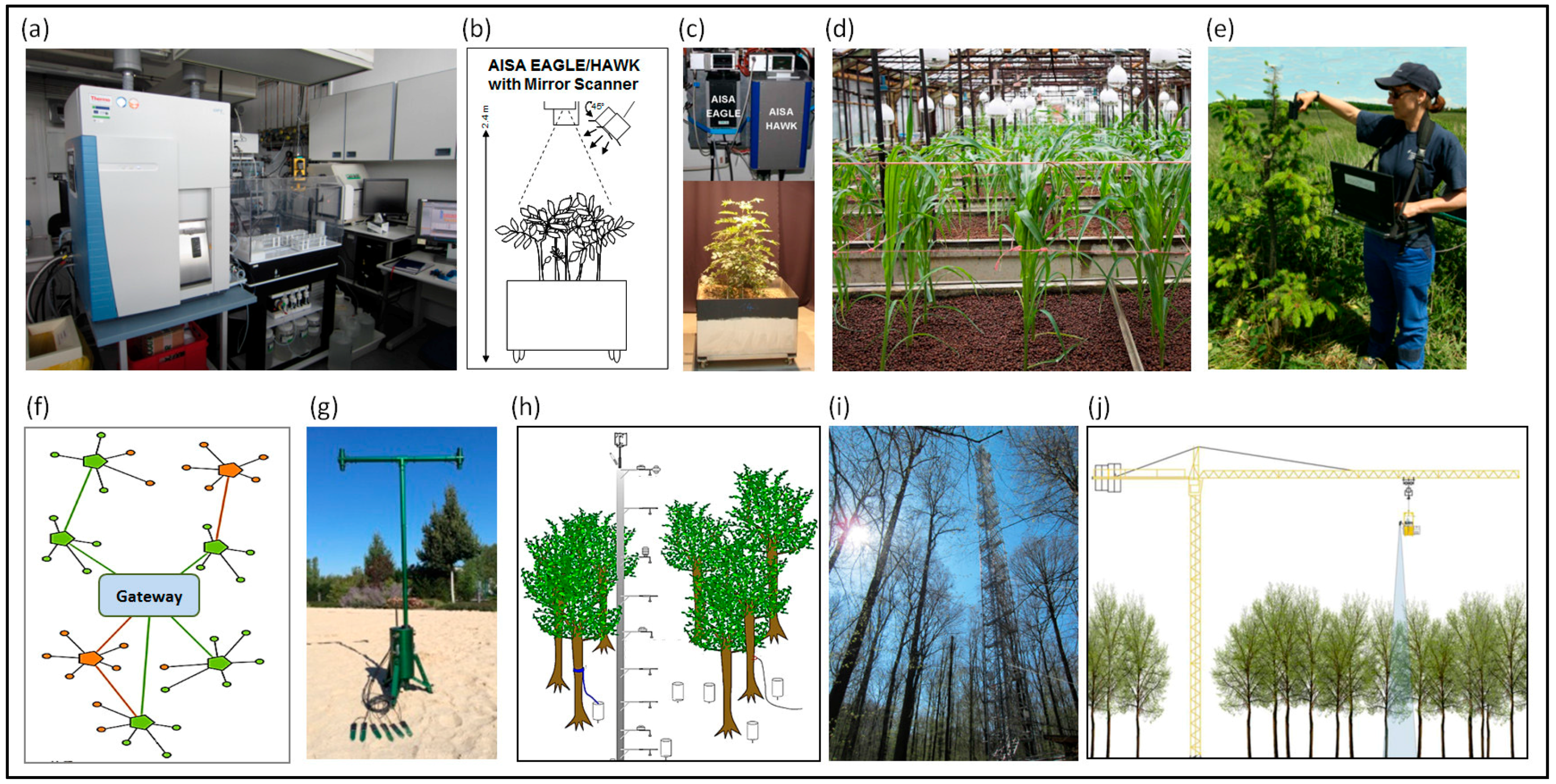
| Close-Range Measurement Approaches/References | Advantages/Applications | Disadvantages |
|---|---|---|
| Field Spectrometers [21,22,23,24] | Basis for research on spectral characteristics of biochemical-biophysical, morphological traits. Spectral databases for classification and validation. Basis for research on taxonomic, phylogenetic, genetic, epigenetic or morphological-functional features. | Analysis at molecular level. Geometric, structural, distribution, population and community effects are not measurable. No standardized measurement protocols available |
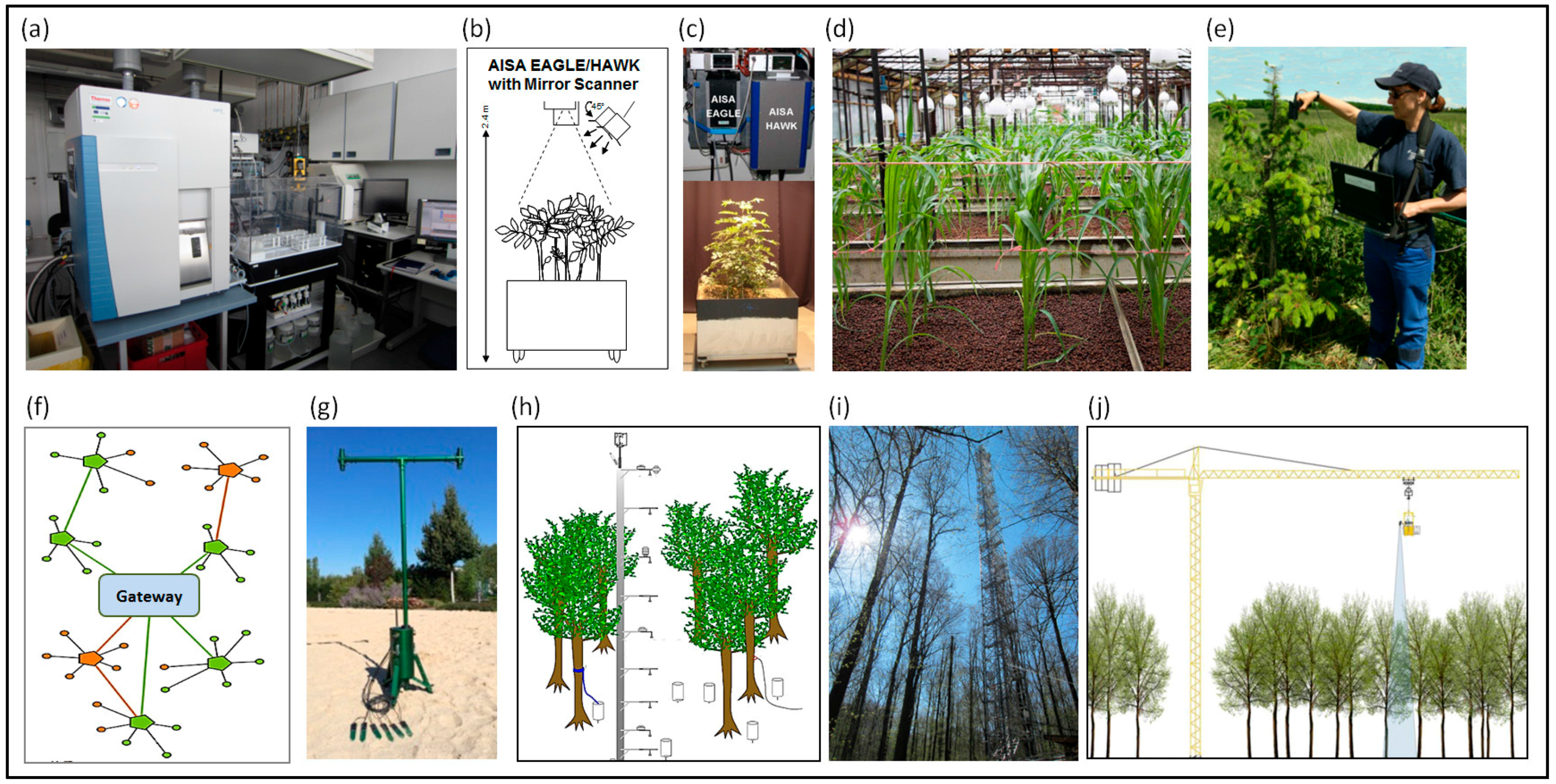
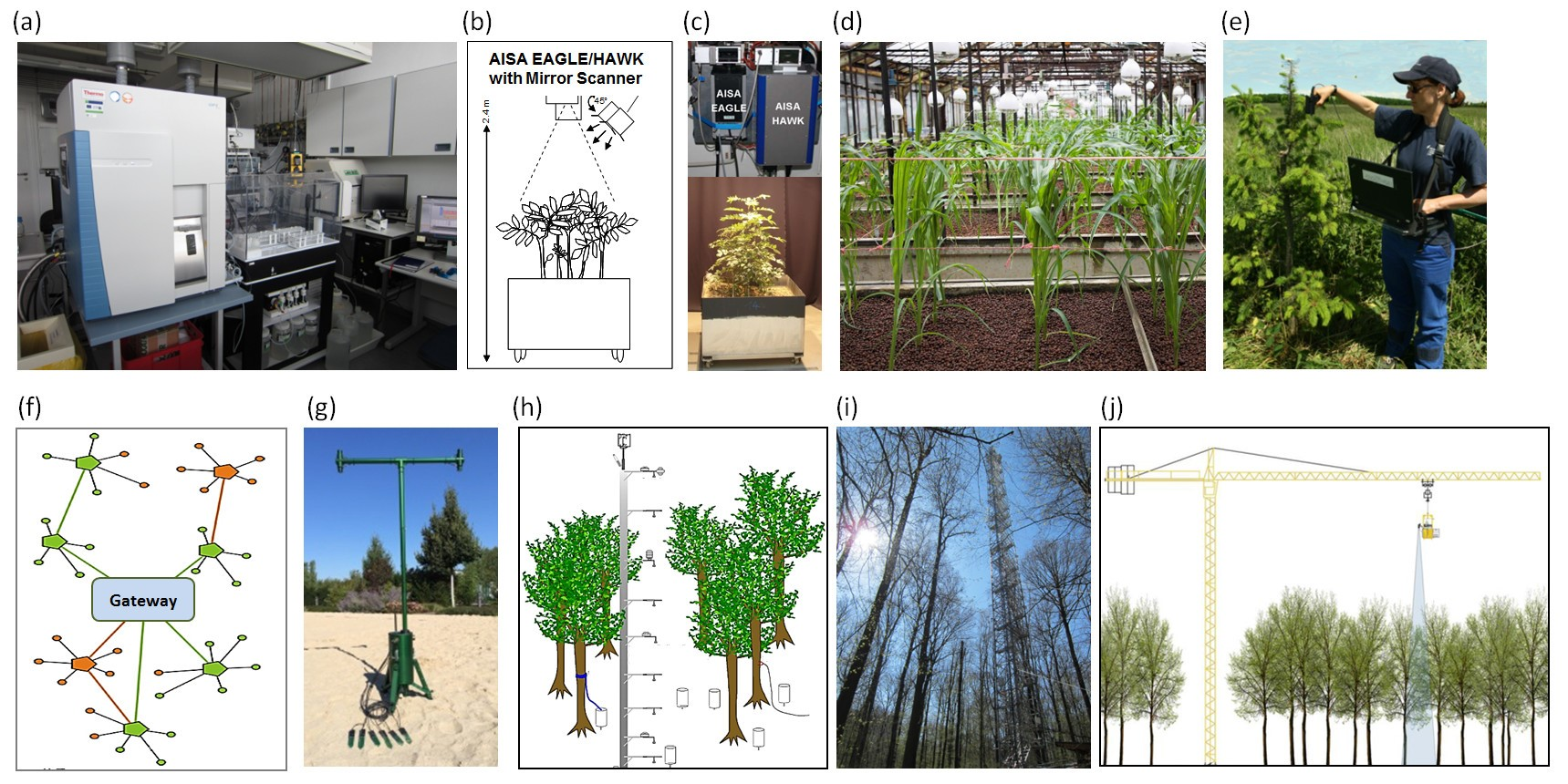
| Spectral laboratory (Manual operation) [18,25,26,27,28,29]. | Seasonal, annual, long-term. Biochemical-biophysical, structural variables in organs (roots, leaf, stem) and whole tree. Experimental stress analyses (drought, heavy metals, tropospheric ozone, flooding, nitrogen loads, etc.). Extensive lab-based measurement program for biotic, abiotic, climate conditions. Comparative analyses can be conducted under natural or artificial conditions. Multi-sensor recording at specific plant development stages. Storage in spectral databases for validation and calibration. | Development of measuring boxes for the sensors (automated). Age and development stages of the trees are a limiting factor (often only trees up to 5 years old can be recorded) |
| Plant phenomics facilities (Fully automatic operation), Ecotrons (Controlled environmental facility), [30,31,32,33,34,35,36,37,38,39,40,41,42,43,44,45,46,47,48]. | ||
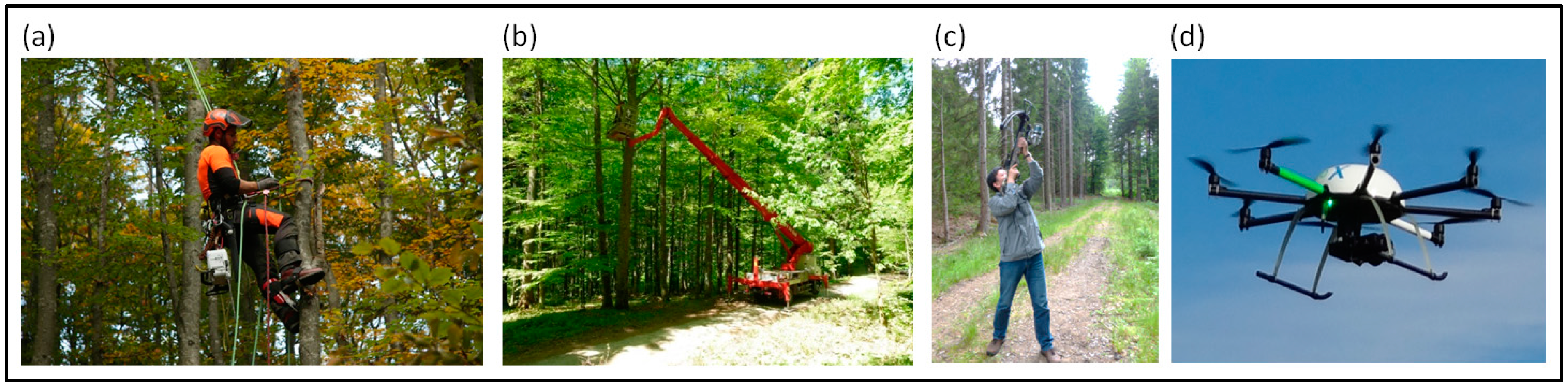
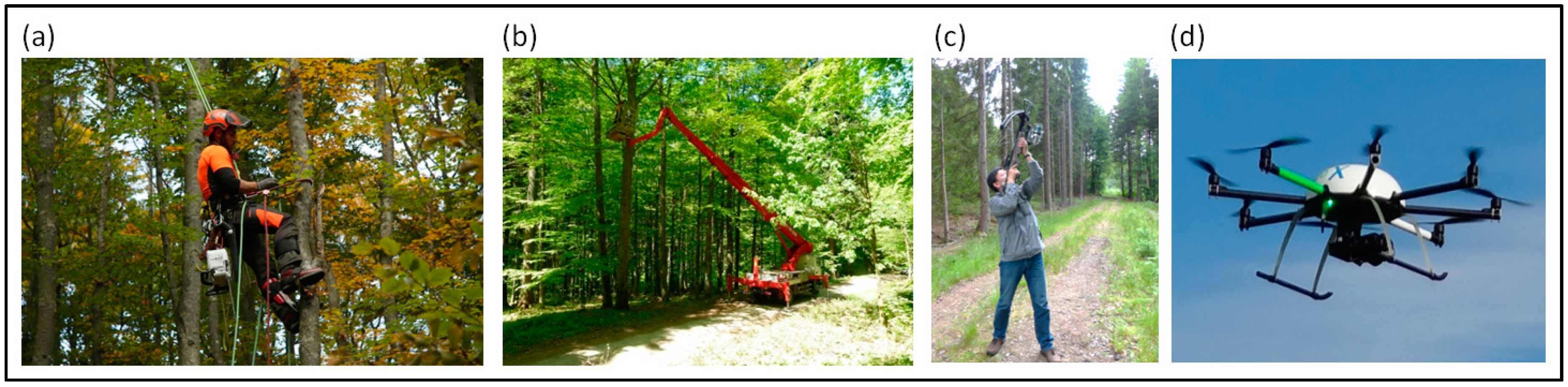
| Tower (eddy flux tower) with different non-invasive measuring technologies as well as RS technology (mobile, permanently installed), [49,50,51,52]. | Long-term monitoring. International networks exist. Extensive multi sensor monitoring is possible for biotic and abiotic conditions (e.g., phenocams). Spectral measurements directly on canopy level. | Local results for a particular site, not transferable |
| Wireless sensor networks (WSN) [53,54,55,56,57,58,59,60,61,62] | Long-term high frequency monitoring. Extensive multi sensor measurement is possible. Measuring various biochemical-biophysical, structural variables in organs (roots, leaf, stem) and whole tree. Enables results over more extensive areas. Easy to install in remote areas. | Primarily non-imaging sensor technology can be implemented |
| Application | Example Studies | Main Findings |
|---|---|---|
| Genotype-epigenetic and phenotype interactions | [30,34] | Qualitative, quantitative and spectroscopic recording of plant species phenotypes for better understanding of the link between the genotype and the phenotype. |
| [67] | Understanding the impacts and resilience to stress, disturbance or resourcelimitations of forest species and ecosystems is crucial for understanding the genotype-epigenetic-phenotypic-environment matrix. | |
| Goal of the Plant Phenotyping Network | [32,71] | International Plant Phenotyping Network [72]: (1) Innovative non-invasive techniques such as stereo systems, hyperspectral, RGB, thermal, fluorescence cameras, laser scanners or X-ray tomography; (2) Continuous, very high temporal resolution acquisition of phenotypical traits that provides important reference information for RS approaches; (3) ST/STV are saved in databases; (4) Data can be used for calibration and validation of air- and spaceborne RS data. |
| Spectral traits of leaves | [27] | Laboratory-based imaging spectroscopy combined with the inversion of a radiative transfer model is able to derive biochemical spectral traits (N, chlorophyll content, carotenoids, brown pigments, water content, dry mass) at the leaf level on the sub-millimeter scale. |
| Development and testing of new close-range RS technologies | [41,42,43,44,45] | Investigations of sun-induced chlorophyll fluorescence methods at the leaf level, field level, and the regional level are only possible through fundamental research in Plant Phenomics Facilities and Ecotrons. |
| [46,47,48] | Evaluated the effects of different plant stresses on photosynthetic performance. This research on chlorophyll fluorescence and its acquisition using spectroscopic techniques forms the basis for developing the European Space Agency (ESA) Fluorescence Explorer Sensors (FLEX, [45,46,70]). | |
| [47] | Development of 3-D digital imaging and a portable terrestrial laser scanner for detecting seasonal change within broad-leaved forest. | |
| [73] | Development of a canopy leaf area density profile. | |
| [48] | 3D-imaging techniques for monitoring the spatio-temporal effects of herbicides on plants. | |
| Monitoring of stress to woody plants | [27] | Reactions to stress factors like drought, can often only be observed years later in the form of biochemical, physiological or geometrical changes to woody plant traits (e.g., in tree rings observed from cross cuttings). Age and development stages of the trees are a limiting factor (often only trees up to the age of 5 years can be recorded). |
| Application | Example Studies | Main Findings |
|---|---|---|
| Phenocam networks | [51] | US National Ecological Observatory Network (NEON) and the European Union’s Integrated Carbon Observation System (ICOS). |
| Fully-automated digital time-lapse cameras (phenocams) and other cameras can be easily mounted on towers. They are crucial sensors for recording, quantifying, monitoring and understanding of phenological traits and the interactions of ST/STV relations to stress, disturbances and resource limitations in forest ecosystems. | ||
| Individual towers | [52] | Fully automated spectral data recording system for phyto-pigments (chlorophyll, carotenoids, anthocyanins) under different view and sun angles. Used to assess diurnal and seasonal variations of plant physiological processes under different illumination and weather conditions. High spatial resolution allows measurement of spectral response of individual tree crowns. Systematic recording of ST/STV can be linked to eddy covariance gas exchange measurements. |
| Flux tower networks | [49,50] | Linking flux towers in an international network (FLUXNET, [76]). Flux towers generally include integrated sampling of ecosystem parameters such as carbon dioxide, water vapour and energy fluxes, as they cycle through the atmosphere, vegetation and soil. FLUX towers are often coupled with the sensor technologies such as spectrometers or soil sensors. |
| Spectral networks | [77] | Spectral network (SpecNet, [78]). Multi-scale spectral RS from satellites, aircraft, UAVs, mobile tram systems, portable spectrometers over same area as flux measurements. The goals of SpecNet are: (1) Monitoring surface–atmosphere fluxes of water, carbon and vapor; (2) Understanding and assessing the impacts of disturbance and dynamic events (e.g., fire, extreme weather events, climate, land-use change). |
| Application | Example Studies | Main Findings |
|---|---|---|
| Forest fire detection | [53,55] | WSNs are implemented for the detection and verification of forest fires in real time. |
| Drought stress | [60] | WSNs used to demonstrate the effects of the 2015 El-Niño extreme drought on the sap flow of trees in eastern Amazonia. |
| Understanding physiological and ecological processes | [58] | Useful in recording and understanding important processes of soil-plant-atmosphere interactions in tropical montane cloud forests in Brazil, key forest ecosystem processes such as transpiration, carbon uptake and storage, and water stripping from clouds that are affected by climatic variation and the temporal and spatial forest structure. |
| [59] | Important in monitoring and understanding hydraulic traits, growth performance and the stomata regulation capacity in three shrub species in a tropical montane scrubland of Brazil under contrasting water availability. The results showed that forest plant species employ different strategies in the regulation of hydraulic and stomatal conductivity during drought stress and thus substantiate the need for setting up WSN for different forest tree species and communities. |
| Application | Example Studies | Main Findings |
|---|---|---|
| Terrain determination (DTM) | [140,141,142,143] | Best remote sensing technique to produce high accuracy DTM´s under dense forest canopy with an RMSE of 0.15–0.35 m. |
| Forest height measurement (DCM) | [93,94,95] | Best remote sensing technique to produce high accuracy forest height measurements. |
| Area based approach | [100,101,102,103,104,105,106,107] | Statistical approach where measurements of field plots were set in relation to LiDAR-metrics. Precision of ~6% for height, ~10% for mean diameter, ~10% for basal area, ~ 20% for stem density and ~12% for AGB estimations. |
| Individual tree approach | [112,141,144,145,146] | In a first step, single trees were automatically delineated from the point cloud and in a second step tree parameters were estimated. With these methods about 80% to 97% of the trees in the upper canopy can be detected and height, crown parameters, DBH, volume, species and health conditions estimated. |
| Coarse woody debris | [96,97,113,114] | Detection of standing and laying coarse woody debris on a single tree basis from LiDAR and in combination with optical data |
| Leafe area index, canopy cover | [108,119,120] | For high quality results, calibration with hemispherical photography or LAI-2000 measurements are needed. But even without calibration, fairly reliable results can be obtained for fractional cover. |
| Vertical forest structure | [125,126,127,128,129,144] | LiDAR data is widely used to represent vertical forest canopy complexity and forest regeneration. These variables have great potential to predict species diversity. |
| Application | Example Studies | Main Findings |
|---|---|---|
| Deforestation | [173] | Shuttle Imaging Radar (SIR) L-band better than C-band. Multiple polarizations required to detect intermediate Amazon deforestation classes. |
| [174] | Airborne L- and P-bands better than X- and C- bands in classifying selective logging classes. Image texture also beneficial. Identified a need for multi-temporal data to discriminate disturbed/logged areas from temporally stable forest classes. | |
| [175] | PALSAR L-band object-based classification of forest and deforestation classes in Indonesia for 4 successive years. Markov chain analysis applied in future scenarios modelling of potential deforestation areas to aid in reducing rates of deforestation. | |
| Forest degradation: Estimation of forest structure parameters | [176] | Above ground biomass (AGB) (avg. 78 t/ha) for 3 classes (non-forest, shrub and forest) in disturbed forests of Laos using PALSAR L-band. High RMSE (42%–52%) but similar to a model using AVNIR optical data, the latter being more difficult to obtain due to the persistent cloud cover. |
| [171,177,178,179] | Improved AGB modelling with higher saturation threshold using: (1) Cross-polarized (HV) data; (2) P-band that penetrates deeper into the canopy; (3) Shorter-to-longer wavelength backscatter ratio (e.g., C/L); (4) Averages of multi-temporal images to reduce moisture/ rain effects. | |
| [180,181] | AGB loss estimation: (1) Relation between 2007 PALSAR HV L-band backscatter and AGB in a forest-savannah of Africa applied to 1996 JERS-1 HH L-band data to estimate biomass and detect areas of biomass loss. Concluded that better consistency and calibration between data types is needed to conduct such temporal analysis; (2) Multi-temporal canopy height derived from SRTM C-band InSAR and IceSAT GLAS LiDAR used in allometric equations to estimate biomass and biomass loss in mangrove forest due to hypersaline soils caused by anthropogenic hydrological changes. | |
| [182] | Leaf Area Index (LAI): VV/HH ratio (and additional VV terms for dry forests with stronger trunk response) derived from Envisat ASAR C-band images to estimate LAI in boreal and subarctic forests. | |
| [183] | Forest density: Six incoherent decomposition techniques compared using RADARSAT-2 data in forests in India. Support Vector Machine (SVM) classification of the decomposition parameters produced 70%–90% accuracy for 3 forest density classes. | |
| Fire impacts | [184] | Greater backscatter in burned areas. |
| [185] | Burn severity and surface roughness in an Alaska forest were the strongest factors affecting ERS-1 C-band VV backscatter. Relationship was strongest when surface moisture variations were minimal. | |
| [186] | Ratio of pre- to post-fire backscatter in a given polarization related to a temperate forest burn intensity index. Dry period cross-polarized data performed best. | |
| [187] | Individual PALSAR polarimetric, phase, and decomposition parameters distinguished Amazon burn classes if area burned 3 or more times. More subtle burn discrimination achieved with multiple variable models, particularly those with phase and power metrics. | |
| Inundation | [173] | Flooded forest class mapped based on dead trees producing high double bounce scattering and a large (120°) phase difference between HH- and VV-polarized returns at both C- and L-band. |
| [188] | Effects of incident angle on RADARSAT-1 C-band backscatter evaluated in flooded forests of North Carolina. Moderate angles detected inundation best during both leaf-off and leaf-on periods. | |
| [189] | InSAR data generated from PALSAR L-band and RADARSAT-1 C-band data to determine flooding levels in Louisiana swamp forests. HH best single polarization. Swamp forest had a relatively high HH/HV ratio (0.4–1.0) indicating significant double-bounce backscatter that helped distinguish it from upland forest. |
| Application | Example Studies | Main Findings |
|---|---|---|
| Estimation of ST/STV of FH | [14,16,138,139] | Implementation of multi-sensor RS in modelling approaches improves the discrimination, quantification and accuracy when estimating ST/STV. |
| [197] | Multiple platforms for a given sensor type, e.g., the forthcoming Radarsat Constellation of three platforms provides potential for more frequent data acquisition. | |
| [198] | Multi-sensor systems on single platforms are promising, as they: (1) Enable data related to different ST to be recorded at the same time; (2) Ensure the same illumination conditions, weather conditions and flight parameters. | |
| Forest diversity indicators (taxonomic, structural and functional diversity) | [210,211] | Sensor characteristics (spatial, radiometric, spectral, temporal or angular or directional resolution) determine the discrimination and classification capabilities of forest diversity indicators. |
| 3D structural ST/STV of trees and canopies | [191,192] | 3D-imaging spectroscopy is crucial to create hyperspectral 3D plant models. |
| [192] | Multi-hyperspectral RS datasets combined or merged with 3D point clouds from LiDAR. | |
| Canopy temperature distribution | [193,194] | 3D thermal tree models and 3D thermal canopy models are available for a better understanding of tree and canopy temperature distribution. |
| FH indicators on the plot and field scale | [212,213,214,215,216,217] | UAVs can carry different sensor types and thus contribute to a more comprehensive, rapid, cost-effective, comparable and repetitive recording of FH indicators at very high resolution. LiDAR, thermal infrared, multispectral, RGB, hyperspectral, real time video. |
| Fusion of multi-sensor RS Data | [218,219] | RS data can be merged to integrate the advantages of high spatial, spectral and temporal resolution within one kind of sensor. Pan-sharpening processes to combine a spatially higher resolution pan-chromatic band with synchronously recorded lower resolution multi-spectral bands. |
| [219] | Fusion of a large number of spectral bands with high spatial resolution data can be achieved using multi-resolution methods (e.g., Wavelets) and high-frequency injection methods. | |
| [220,221] | Spatial and Temporal Adaptive Reflectance Fusion Model (STARFM,) that combines the spatial accuracy of Landsat data with the temporal resolution of MODIS RS data. | |
| [219] | Data fusions approaches that merge spatial, spectral as well as temporally high resolution RS sensors into one data set. |
| Input RS Information | Modelling Approach | Model Type | Algorithm | (Target Variable) [Reference Application] |
|---|---|---|---|---|
| Spectral indices (e.g., SR, NDVI, tasseled cap), Raw DN, Spectral reflectance, Principal components, PAR, APAR, Multi-angular reflectance, Image spatial or temporal metrics, LiDAR waveform metrics, SAR amplitude, SAR coherence, SAR polarimetry | Empirical | Linear and non-linear regression | Linear regression | (AGB, carbon), [239]; (AGB), [240,241] |
| Ordinary least squares | (height, density, DBH), [242] | |||
| Reduced major axis | (AGB), [243]; (LAI), [244] | |||
| Canonical Correlation Analysis | (forest structural conditions), [222] | |||
| Redundancy Analysis | (forest structural conditions), [245,246] | |||
| Trend analysis | (growth), [247] | |||
| Non-parametric regression | kNN | (AGB, carbon), [248] | ||
| CART | (tree cover), [249]; (basal area, no. of trees) [250] | |||
| RF | (AGB) [243,251] | |||
| SVM | (height, density, DBH), [242] | |||
| Physical | Radiative transfer/canopy reflectance model | Geometric-Optical | (LAI), [252]; (AGB), [253]; (Chlorophyll), [254] | |
| Turbid-medium | (LAI), [255] | |||
| hybrid | (allometry), [256] | |||
| Computer simulation | ||||
| Coherence-Amplitude conversion | RVoG | (height), [236,238] | ||
| WCM | (AGB), [237] | |||
| Hybrid | Neural Networks | (LAI), [235] |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lausch, A.; Erasmi, S.; King, D.J.; Magdon, P.; Heurich, M. Understanding Forest Health with Remote Sensing-Part II—A Review of Approaches and Data Models. Remote Sens. 2017, 9, 129. https://doi.org/10.3390/rs9020129
Lausch A, Erasmi S, King DJ, Magdon P, Heurich M. Understanding Forest Health with Remote Sensing-Part II—A Review of Approaches and Data Models. Remote Sensing. 2017; 9(2):129. https://doi.org/10.3390/rs9020129
Chicago/Turabian StyleLausch, Angela, Stefan Erasmi, Douglas J. King, Paul Magdon, and Marco Heurich. 2017. "Understanding Forest Health with Remote Sensing-Part II—A Review of Approaches and Data Models" Remote Sensing 9, no. 2: 129. https://doi.org/10.3390/rs9020129