
Long-Term Monitoring of the Flooding Regime and Hydroperiod of Doñana Marshes with Landsat Time Series (1974–2014)




Abstract
:
1. Introduction
2. Material and Methods
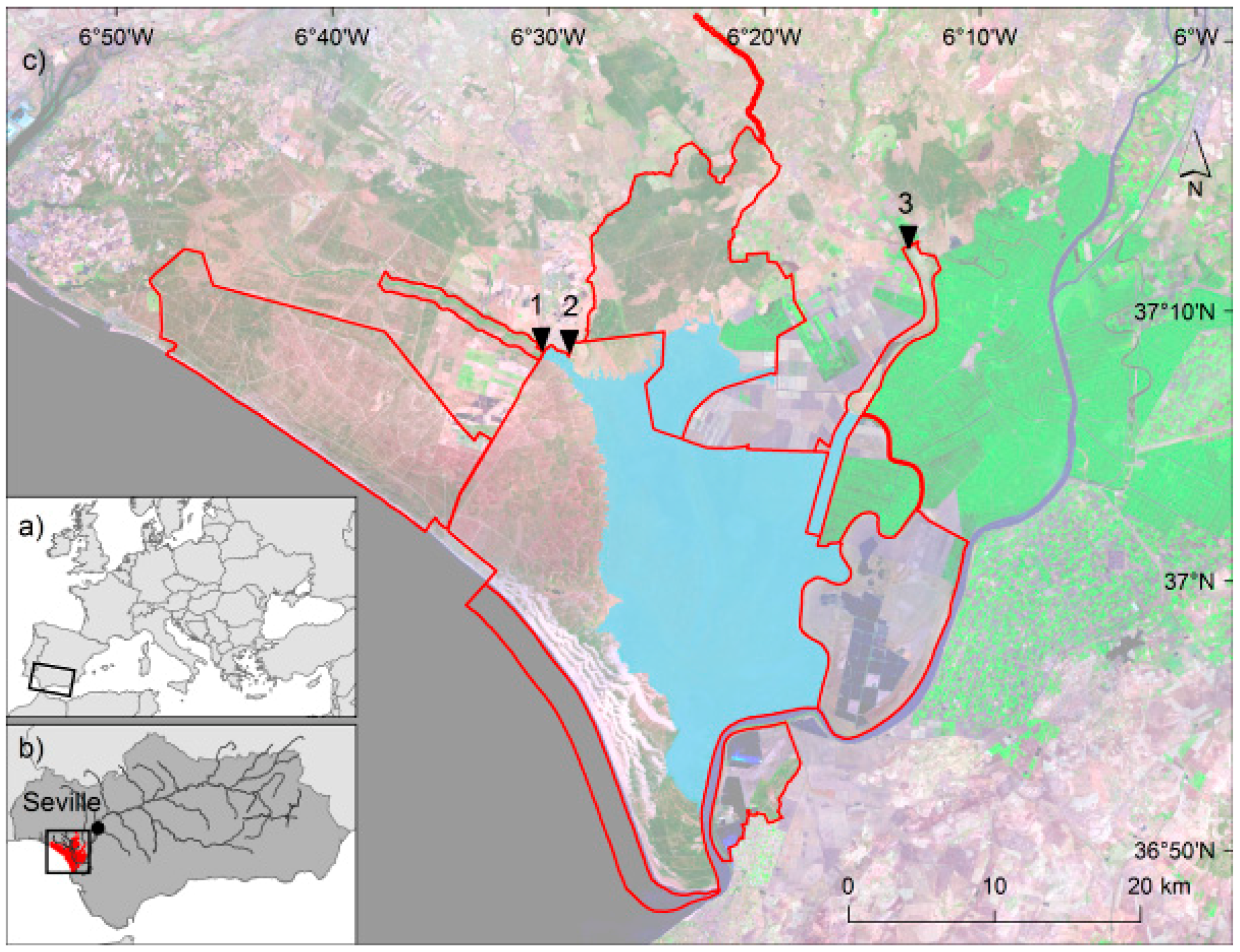
2.1. Study Area
2.2. Satellite Imagery
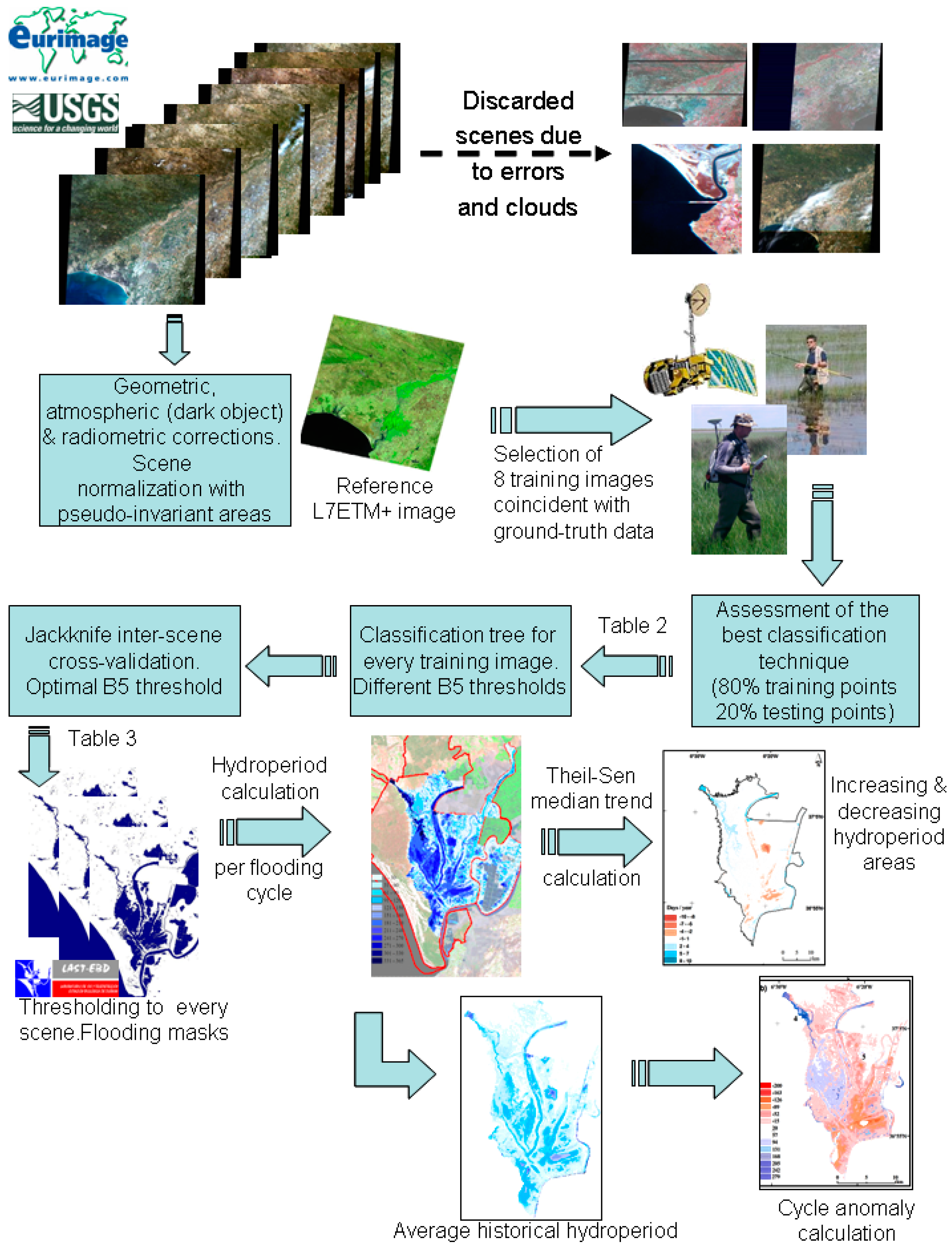
2.3. Image Processing
2.4. Ground Truthing
2.5. Flood Mapping and Accuracy Assessment
- Computing classification trees, using the whole set of training images except for one of them each time, which was used as a validation image.
- Computing the classification tree using all the training images.
- Evaluating threshold accuracies from the all training images classification tree over the validation image with the ground-truth data for the corresponding date.
2.6. Hydroperiod Mapping and Trend Analysis
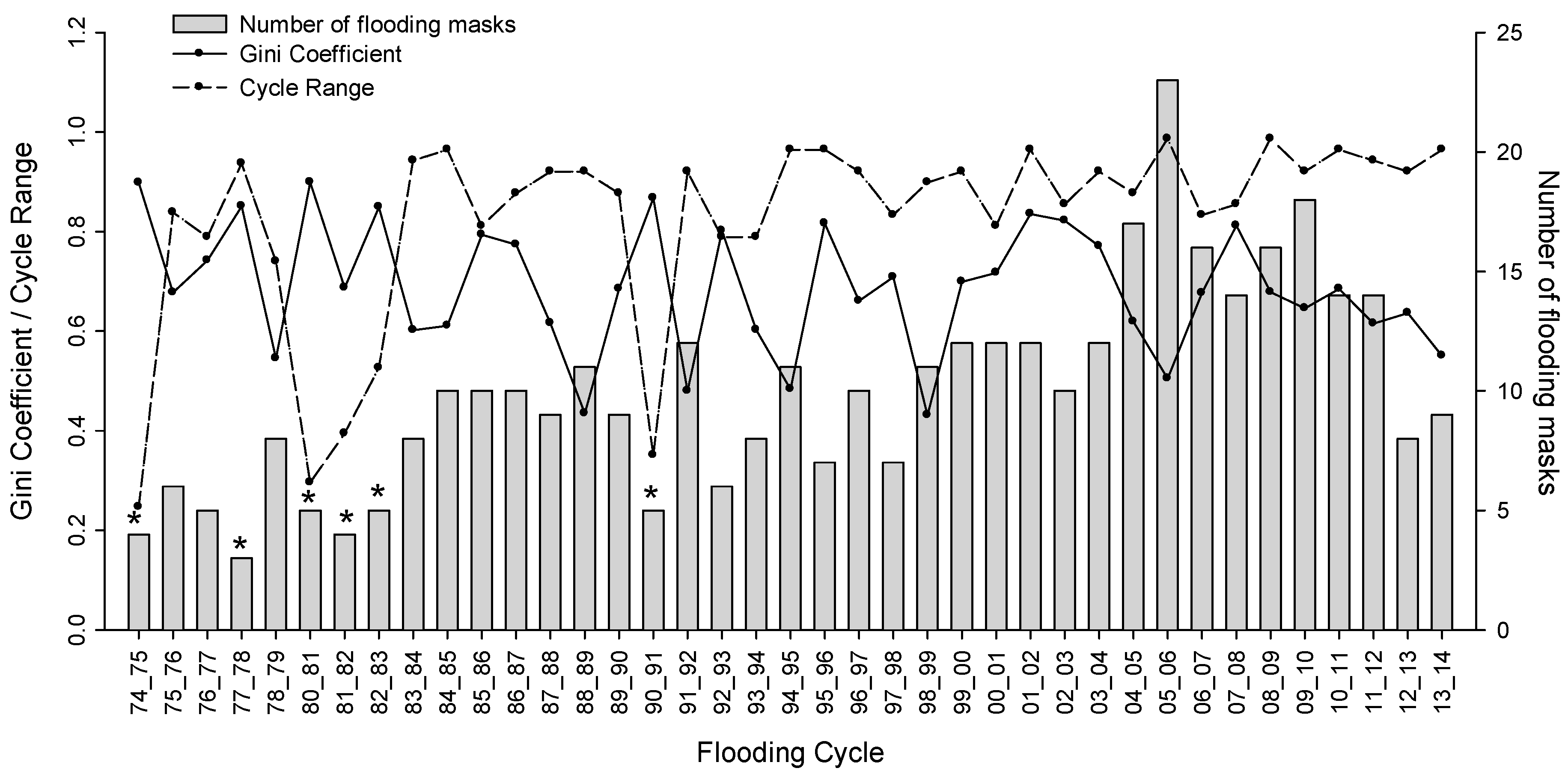
- Cycle range (Cr): the ratio between the DoC range (earliest available date minus latest available date) per cycle and the complete cycle value (365 days). This index provides a rapid assessment of the percentage of the complete cycle covered by the first and last flooding mask available for each cycle.
- Gini Index [62]: Calculated as the area under the equality curve and the cumulative proportion of available dates in relation to possible dates (22 Landsat MSS or TM acquisitions for a complete flooding cycle from 1974 to 1998 and 45 Landsat TM and ETM+ acquisitions from 1999 to 2011). The Gini Index provides a quick assessment on the evenness of available flood masks along the flooding cycle (values from 0 to 1). The higher the Gini Index for a cycle the lower the representativeness of the Hc values.
3. Results
3.1. Flood Mapping and Global Accuracy Assessment
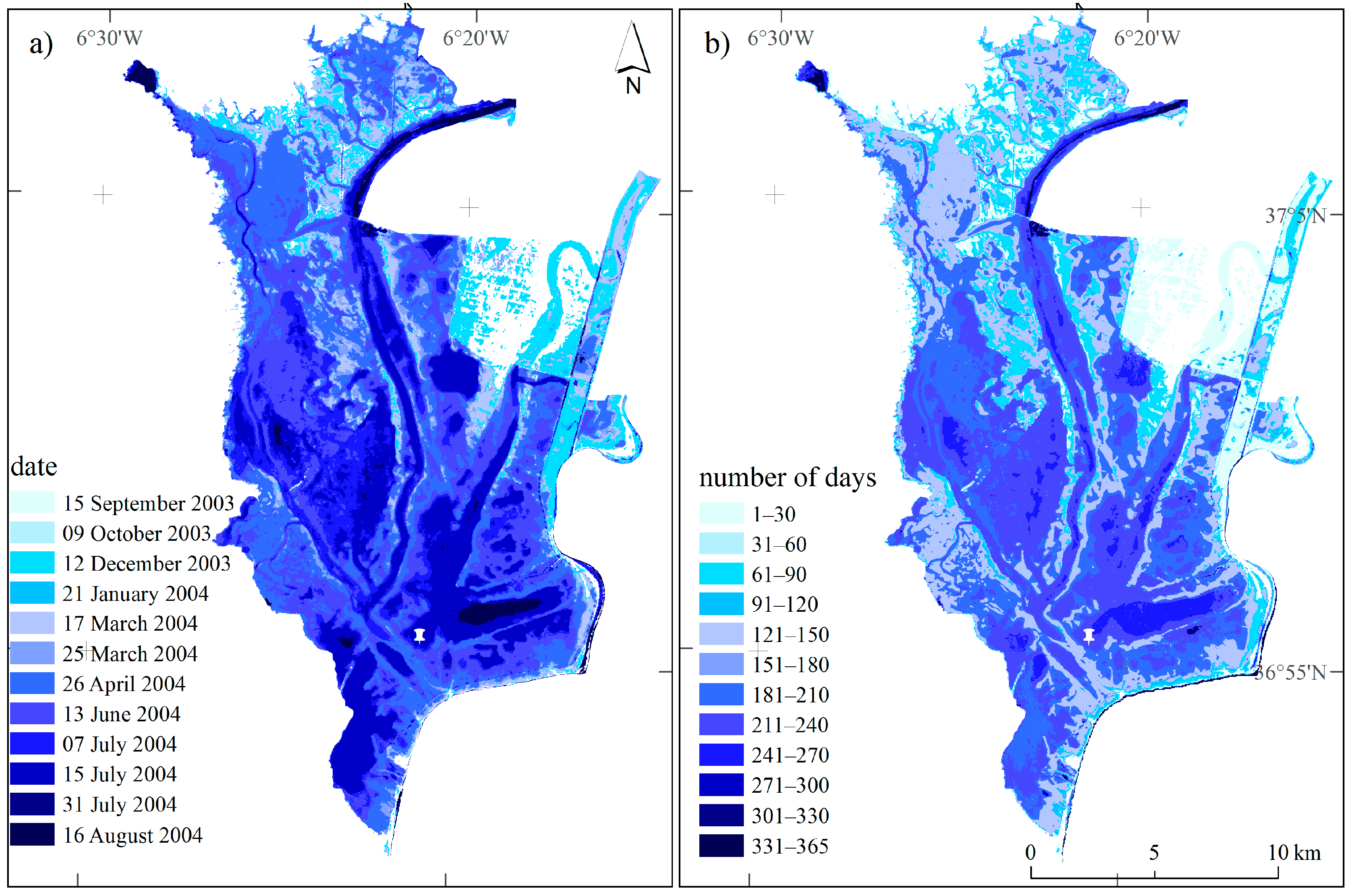
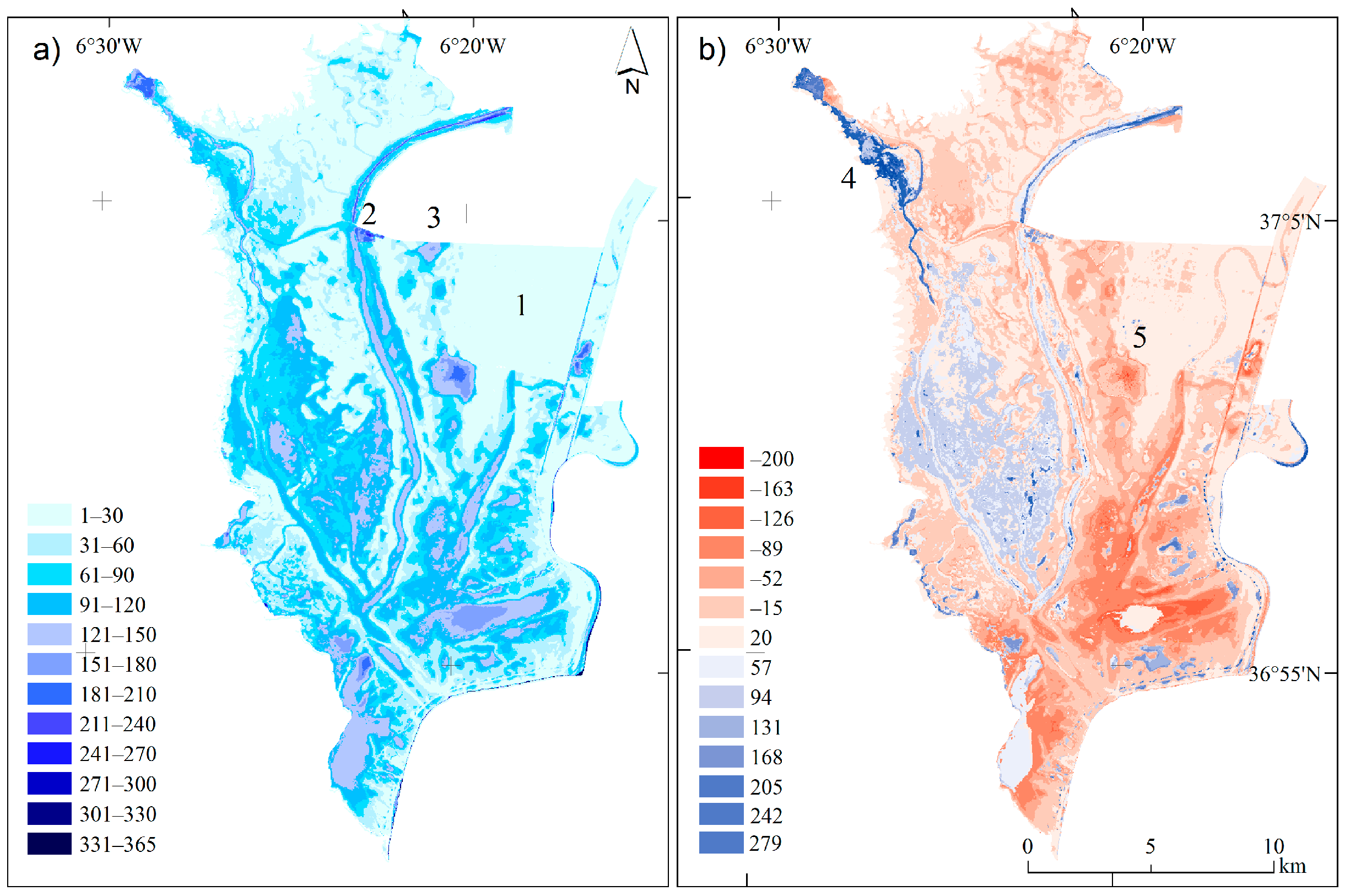
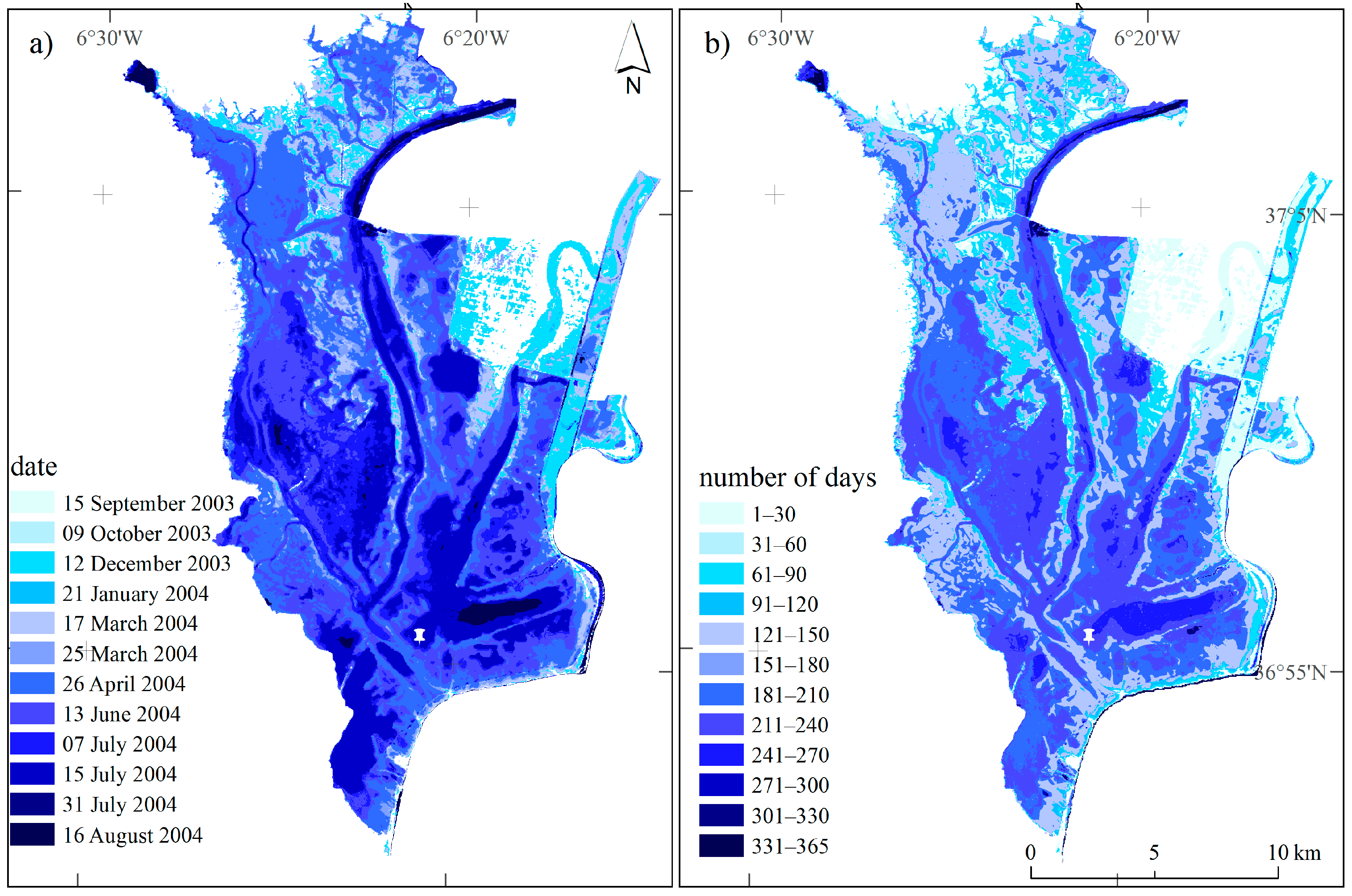
3.2. Hydroperiod Mapping
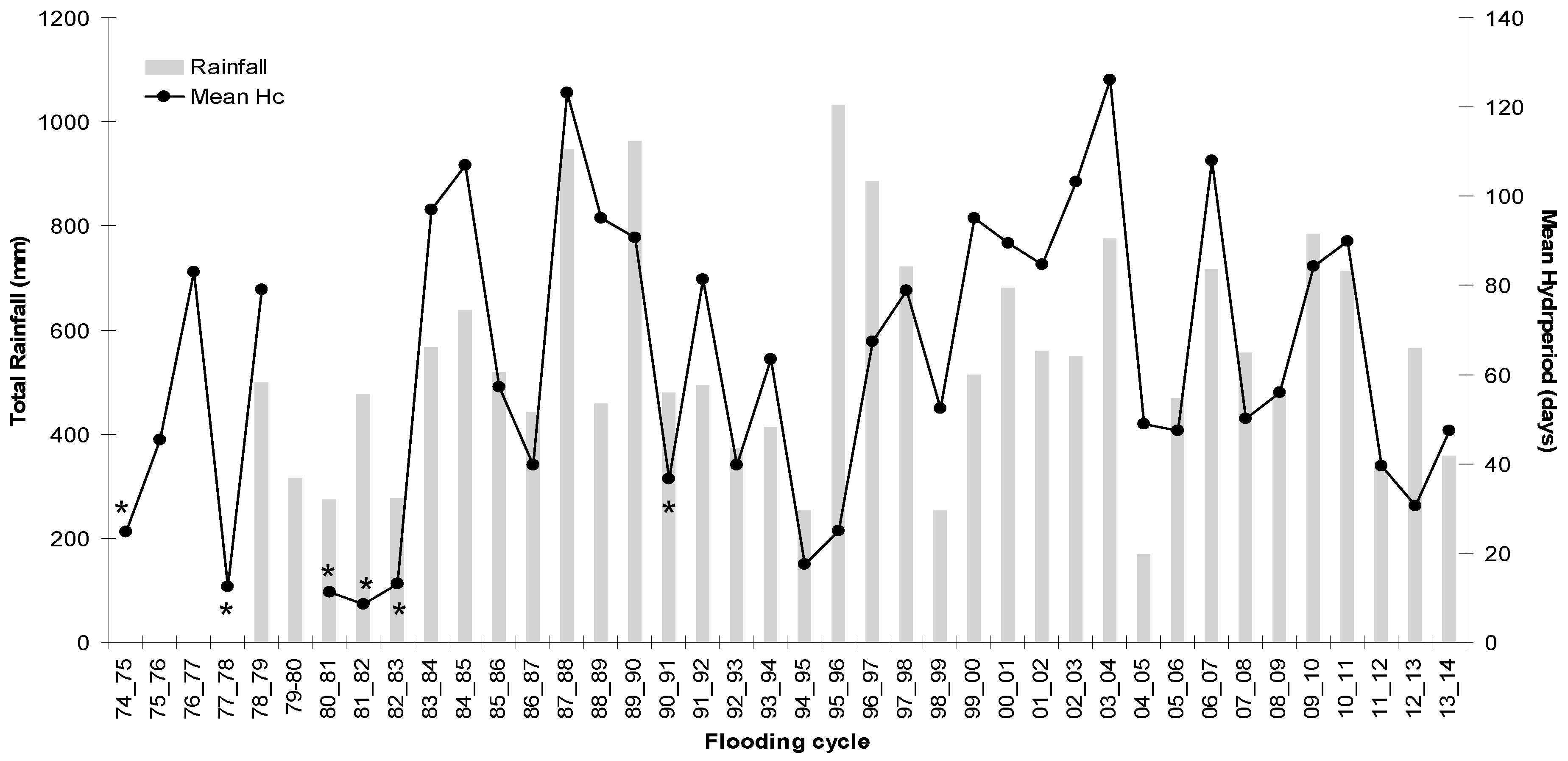
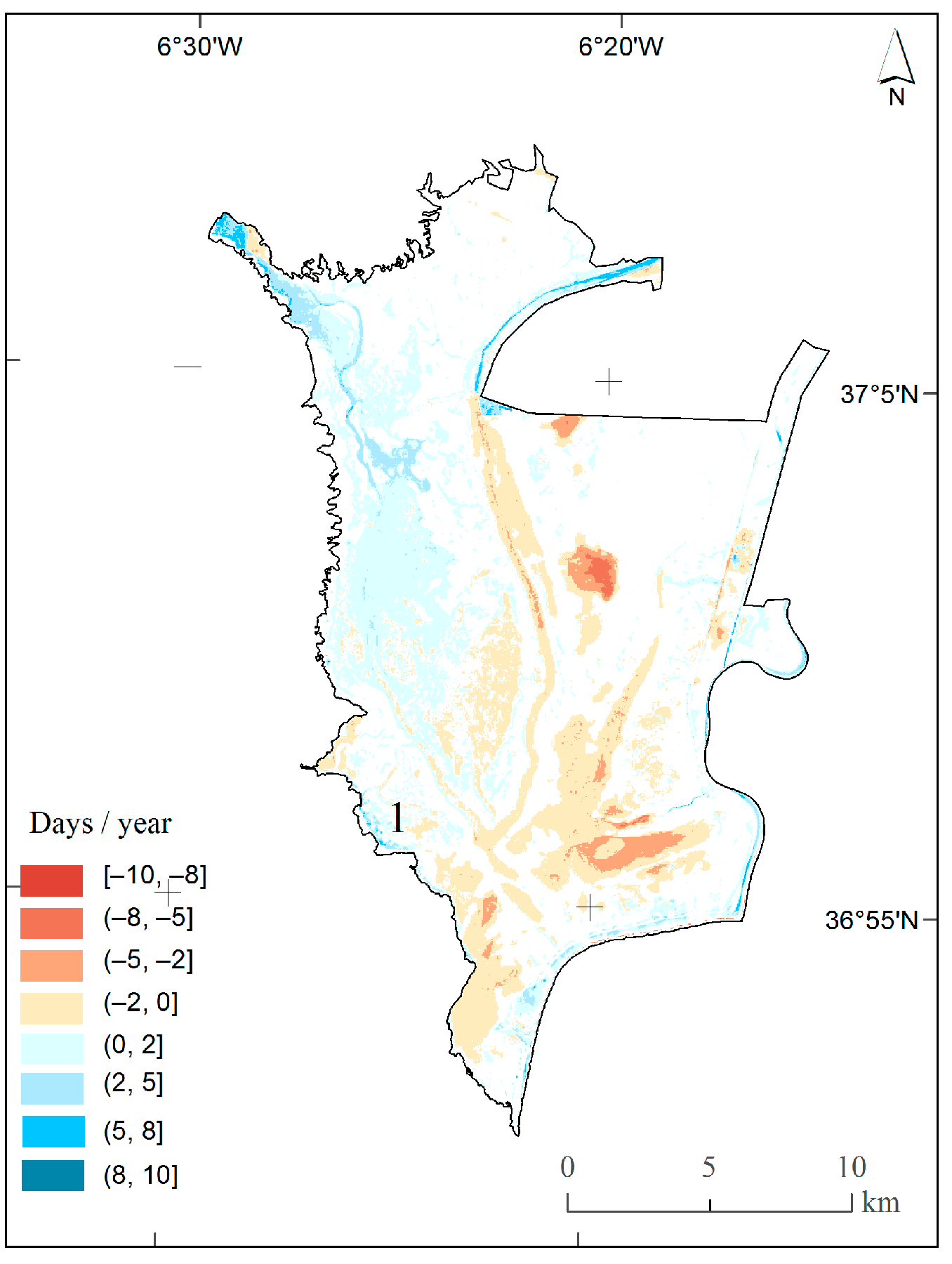
3.3. Hydroperiod Historical Trend and Anomalies
- (a)
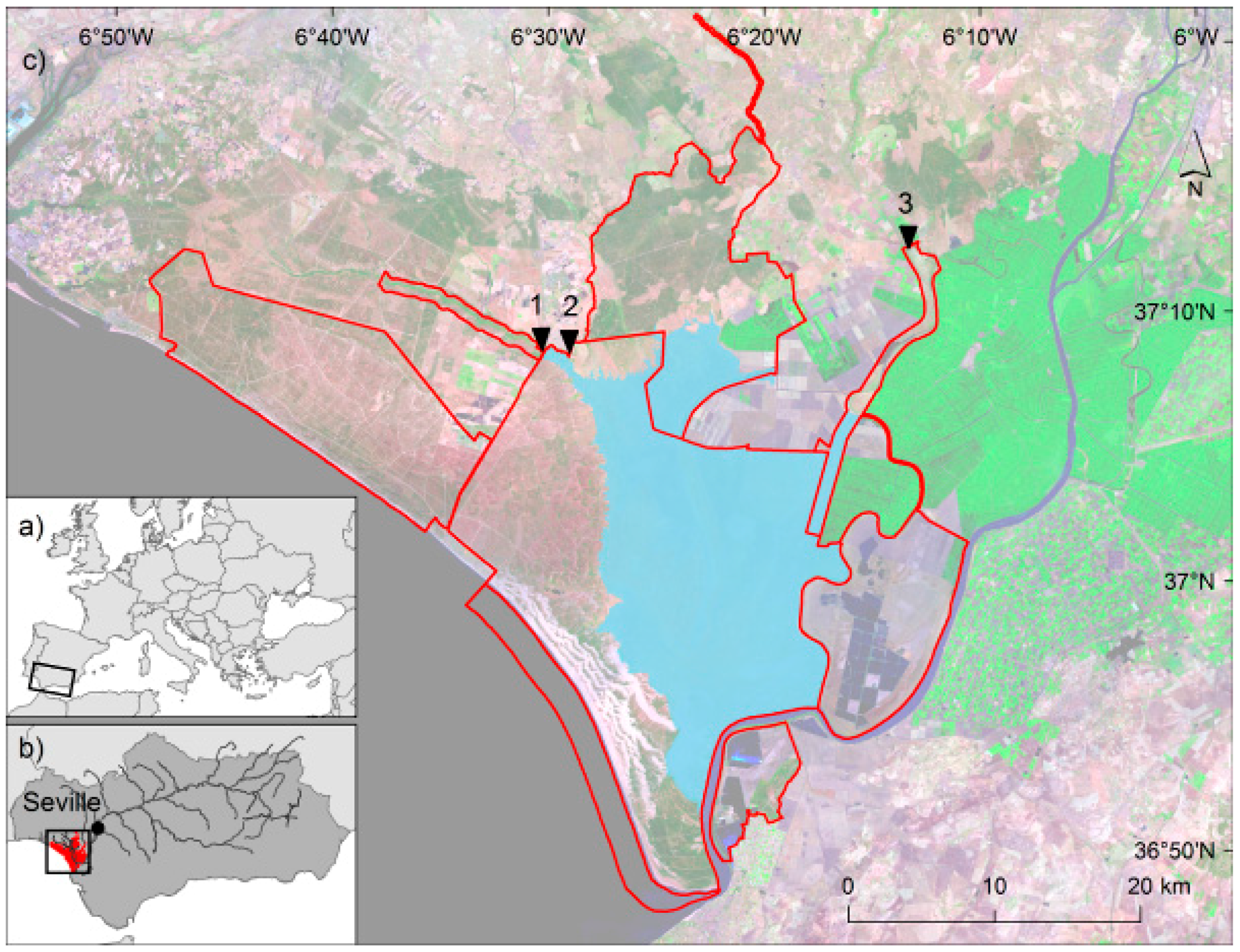
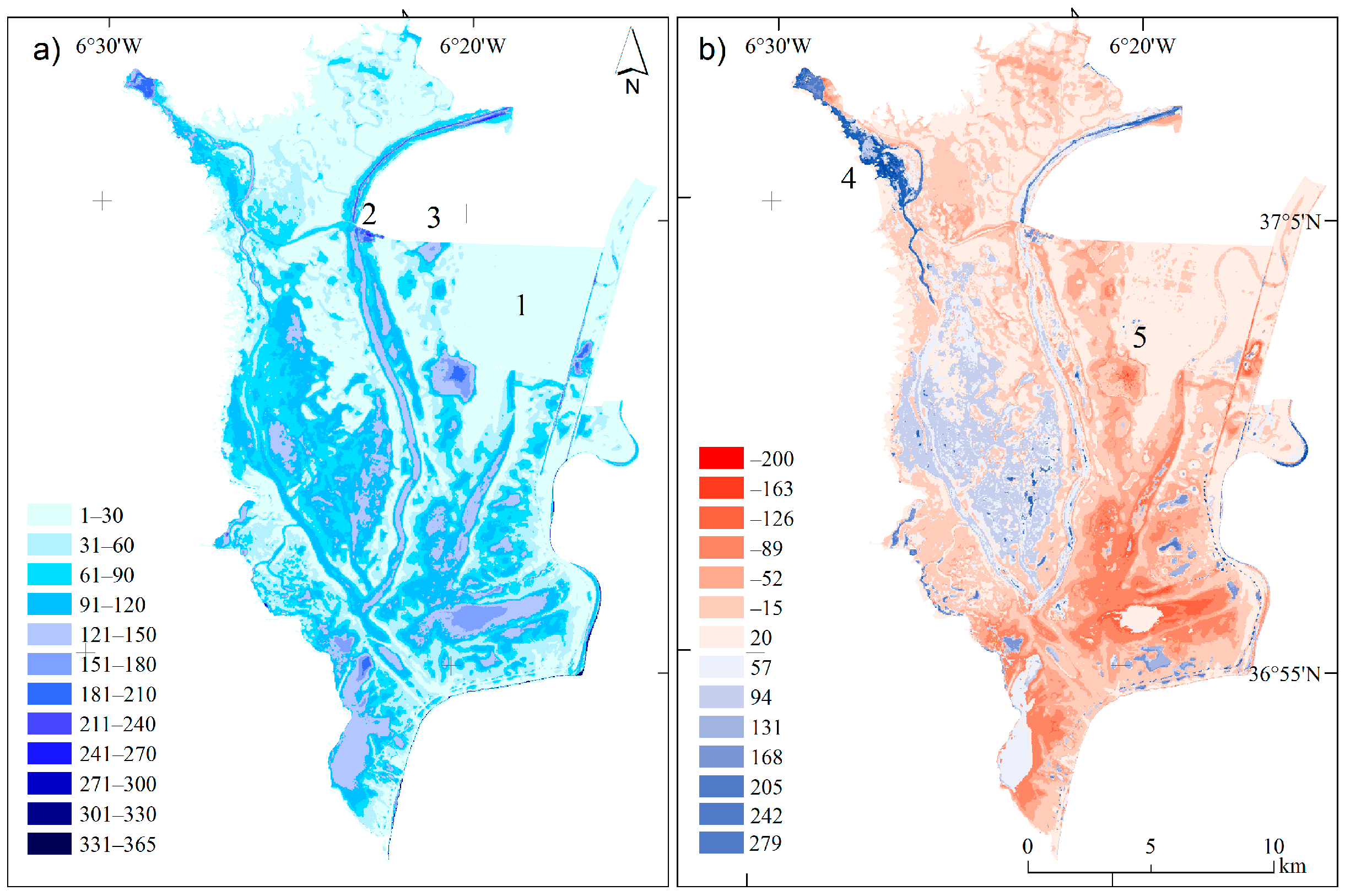
- an area (bluish colours in Figure 8) fed by tributaries, both canalized and natural (Caño Travieso, Caño Guadiamar, Arroyo de la Rocina see Figure 1), pumping stations (Lucio de la FAO, label 2 in Figure 7a), groundwater seepages (Lucio del Hondón and Vera Sur labelled as 1 in Figure 8) or brackish waters from Guadalquivir River; and
- (b)
4. Discussion
4.1. Overall Assessment of the Method
4.2. Monitoring Flooding Regime of Doñana Marshes: The Scientific Contribution
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Garcia Novo, F.; Alonso Vizcaino, E.M.; Marin Cabrera, C. Doñana-Water and Biosphere; Mateu Cromo Artes Gráficas: Madrid, España, 2006. [Google Scholar]
- Manzano, M.; Custodio, E.; Mediavilla, C.; Montes, C. Effects of localised intensive aquifer exploitation on the Doñana wetlands (SW Spain). In Groundwater Intensive Use; IAH Selected Papers on Hydrogeology; Taylor & Francis: Leiden, The Netherlands, 2005; p. 401. [Google Scholar]
- Casado, S.; Montes, C. Estado de conservación de los humedales peninsulares españoles. Quercus 1991, 66, 18–26. [Google Scholar]
- Sánchez Navarro, R. Environmental Flows in the Marsh of the National Park of Doñana and Its Area of Influence; WWF España: Madrid, España, 2009. [Google Scholar]
- Méndez, P.F.; Isendahl, N.; Amezaga, J.M.; Santamaría, L. Facilitating Transitional Processes in Rigid Institutional Regimes for Water Management and Wetland Conservation: Experience from the Guadalquivir Estuary. Ecol. Soc. 2012, 17, 26. [Google Scholar] [CrossRef]
- Nuttle, W.K. Measurement of wetland hydroperiod using harmonic analysis. Wetlands 1997, 17, 82–89. [Google Scholar] [CrossRef]
- Alcorlo, P.; Jimenez, S.; Baltanas, A.; Rico, E. Assessing the patterns of the invertebrate community in the marshes of Donana National Park (SW Spain) in relation to environmental factors. Limnetica 2014, 33, 189–204. [Google Scholar]
- Tarr, M.; Babbitt, K.J. The Importance of Hydroperiod in Wetland Assessment A Guide for Community Officials, Planners, and Natural Resource Professionals; University of New Hampshire Cooperative Extension, the UNH Department of Natural Resources, and the NH Fish and Game Department: Durham, NH, USA, 2008. [Google Scholar]
- Zhang, M.; Ustin, S.L.; Rejmankova, E.; Sanderson, E.W. Monitoring Pacific coast salt marshes using remote sensing. Ecol. Appl. 1997, 7, 1039–1053. [Google Scholar] [CrossRef]
- Baker, C.; Lawrence, R.; Montagne, C.; Patten, D. Mapping wetlands and riparian areas using Landsat ETM+ imagery and decision-tree-based models. Wetlands 2006, 26, 465–474. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Belluco, E.; Camuffo, M.; Ferrari, S.; Modenese, L.; Silvestri, S.; Marani, A.; Marani, M. Mapping salt-marsh vegetation by multispectral and hyperspectral remote sensing. Remote Sens. Environ. 2006, 105, 54–67. [Google Scholar] [CrossRef]
- Cózar, A.; García, C.M.; Gálvez, J.A.; Loiselle, S.A.; Bracchini, L.; Cognetta, A. Remote sensing imagery analysis of the lacustrine system of Ibera wetland (Argentina). Ecol. Model. 2005, 186, 29–41. [Google Scholar] [CrossRef]
- Doxaran, D.; Castaing, P.; Lavender, S.J. Monitoring the maximum turbidity zone and detecting fine-scale turbidity features in the Gironde estuary using high spatial resolution satellite sensor (SPOT HRV, Landsat ETM+) data. Int. J. Remote Sens. 2006, 27, 2303–2321. [Google Scholar] [CrossRef]
- Lira, J. Segmentation and morphology of open water bodies from multispectral images. Int. J. Remote Sens. 2006, 27, 4015–4038. [Google Scholar] [CrossRef]
- Shanmugam, P.; Ahn, Y.H.; Sanjeevi, S. A comparison of the classification of wetland characteristics by linear spectral mixture modelling and traditional hard classifiers on multispectral remotely sensed imagery in southern India. Ecol. Model. 2006, 194, 379–394. [Google Scholar] [CrossRef]
- Gardiner, N.; Díaz-Delgado, R. Trends in Selected Biomes, Habitats and Ecosystems: Inland Waters. In Sourcebook on Remote Sensing and Biodiversity Indicators; Technical Series; Secretariat of the Convention on Biological Diversity: Montreal, QC, Canada, 2007; pp. 83–102. [Google Scholar]
- Davranche, A.; Poulin, B.; Lefebvre, G. Mapping flooding regimes in Camargue wetlands using seasonal multispectral data. Remote Sens. Environ. 2013, 138, 165–171. [Google Scholar] [CrossRef]
- Jain, S.K.; Singh, R.D.; Jain, M.K.; Lohani, A.K. Delineation of Flood-Prone Areas Using Remote Sensing Techniques. Water Resour. Manag. 2005, 19, 333–347. [Google Scholar] [CrossRef]
- Overton, I.C. Modelling floodplain inundation on a regulated river: integrating GIS, remote sensing and hydrological models. River Res. Appl. 2005, 21, 991–1001. [Google Scholar] [CrossRef]
- Johnston, R.; Barson, M. Remote sensing of Australian wetlands: An evaluation of Landsat TM data for inventory and classification. Mar. Freshw. Res. 1993, 44, 235–252. [Google Scholar] [CrossRef]
- Bustamante, J.; Pacios, F.; Díaz-Delgado, R.; Aragonés, D. Predictive models of turbidity and water depth in the Doñana marshes using Landsat TM and ETM+ images. J. Environ. Manage. 2009, 90, 2219–2225. [Google Scholar] [CrossRef] [PubMed]
- Binding, C.E.; Bowers, D.G.; Mitchelson-Jacob, E.G. Estimating suspended sediment concentrations from ocean colour measurements in moderately turbid waters; the impact of variable particle scattering properties. Remote Sens. Environ. 2005, 94, 373–383. [Google Scholar] [CrossRef]
- Marti-Cardona, B.; Dolz-Ripolles, J.; Lopez-Martinez, C. Wetland inundation monitoring by the synergistic use of ENVISAT/ASAR imagery and ancilliary spatial data. Remote Sens. Environ. 2013, 139, 171–184. [Google Scholar] [CrossRef]
- Ramos-Fuertes, A.; Marti-Cardona, B.; Blade, E.; Dolz, J. Envisat/ASAR Images for the Calibration of Wind Drag Action in the Donana Wetlands 2D Hydrodynamic Model. Remote Sens. 2014, 6, 379–406. [Google Scholar] [CrossRef]
- Marti-Cardona, B.; Lopez-Martinez, C.; Dolz-Ripolles, J.; Bladè-Castellet, E. ASAR polarimetric, multi-incidence angle and multitemporal characterization of Doñana wetlands for flood extent monitoring. Remote Sens. Environ. 2010, 114, 2802–2815. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.; Endres, S.; Battaglia, M.; Miller, M.E.; Banda, E.; Laubach, Z.; Higman, P.; Chow-Fraser, P.; Marcaccio, J. Development of a bi-national great lakes coastal wetland and land use map using three-season PALSAR and Landsat imagery. Remote Sens. 2015, 7, 8655–8682. [Google Scholar] [CrossRef]
- Bourgeau-Chavez, L.L.; Smith, K.B.; Brunzell, S.M.; Kasischke, E.S.; Romanowicz, E.A.; Richardson, C.J. Remote monitoring of regional inundation patterns and hydroperiod in the Greater Everglades using Synthetic Aperture Radar. Wetlands 2005, 25, 176–191. [Google Scholar] [CrossRef]
- Hong, S.H.; Kim, H.O.; Wdowinski, S.; Feliciano, E. Evaluation of polarimetric SAR decomposition for classifying wetland vegetation types. Remote Sens. 2015, 7, 8563–8585. [Google Scholar] [CrossRef]
- Lyon, J.G.; Lyon, L.K. Practical Handbook for Wetland Identification and Delineation, Second Edition; CRC Press: Boca Raton, FL, USA, 2011. [Google Scholar]
- White, L.; Brisco, B.; Dabboor, M.; Schmitt, A.; Pratt, A. A collection of SAR methodologies for monitoring wetlands. Remote Sens. 2015, 7, 7615–7645. [Google Scholar] [CrossRef]
- Röder, A.; Kuemmerle, T.; Hill, J. Extension of retrospective datasets using multiple sensors. An approach to radiometric intercalibration of Landsat TM and MSS data. Remote Sens. Environ. 2005, 95, 195–210. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, B.; Zhang, S.; Li, X.; Liu, D.; Song, K.; Li, J.; Li, F.; Duan, H. Changes of land use and of ecosystem service values in Sanjiang Plain, Northeast China. Environ. Monit. Assess. 2006, 112, 69–91. [Google Scholar] [CrossRef] [PubMed]
- Lan, Z.; Zhang, D. Study on optimization-based layered classification for separation of wetlands. Int. J. Remote Sens. 2006, 27, 1511–1520. [Google Scholar] [CrossRef]
- Leimgruber, P.; Christen, C.A.; Laborderie, A. The impact of landsat satellite monitoring on conservation biology. Environ. Monit. Assess. 2005, 106, 81–101. [Google Scholar] [CrossRef] [PubMed]
- Islam, M.A.; Thenkabail, P.S.; Kulawardhana, R.W.; Alankara, R.; Gunasinghe, S.; Edussriya, C.; Gunawardana, A. Semi-automated methods for mapping wetlands using Landsat ETM+ and SRTM data. Int. J. Remote Sens. 2008, 29, 7077–7106. [Google Scholar] [CrossRef]
- Haberl, H.; Gaube, V.; Díaz-Delgado, R.; Krauze, K.; Neuner, A.; Peterseil, J.; Plutzar, C.; Singh, S.J.; Vadineanu, A. Towards an integrated model of socioeconomic biodiversity drivers, pressures and impacts. A feasibility study based on three European long-term socio-ecological research platforms. Ecol. Econ. 2009, 68, 1797–1812. [Google Scholar] [CrossRef]
- Duarte, C.; Montes, C.; Agustí, S.; Martino, P.; Bernués, M.; Kalff, J. Biomasa de macrófitos acuáticos en la marisma del Parque Nacional de Doñana (SW España): Importancia y factores ambientales que controlan su distribución. Limnetica 1990, 6, 1–12. [Google Scholar]
- Díaz-Delgado, R. La investigación y seguimiento ecológico a largo plazo (LTER). Ecosistemas 2016, 25, 1–3. [Google Scholar] [CrossRef]
- Hall, F.G.; Strebel, D.E.; Nickeson, J.E.; Goetz, S.J. Radiometric rectification: Toward a common radiometric response among multidate, multisensor images. Remote Sens. Environ. 1991, 35, 11–27. [Google Scholar] [CrossRef]
- Schott, J.R.; Salvaggio, C.; Volchok, W.J. Radiometric scene normalization using pseudoinvariant features. Remote Sens. Environ. 1988, 26, 1–16. [Google Scholar] [CrossRef]
- De Junta, A. Ortofotografía digital de Andalucía (color) 1998–1999. Cons. Obras Públ. Transp. 2003. [Google Scholar]
- Chuvieco, E. Teledetección ambiental: La observación de la tierra desde el espacio, 3rd ed.; Ariel: Barcelona, Spain, 2010. [Google Scholar]
- Maxwell, S.K.; Schmidt, G.L.; Storey, J.C. A multi-scale segmentation approach to filling gaps in Landsat ETM+ SLC-off images. Int. J. Remote Sens. 2007, 28, 5339–5356. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, X.; Vogelmann, J.E.; Gao, F.; Jin, S. A simple and effective method for filling gaps in Landsat ETM+ SLC-off images. Remote Sens. Environ. 2011, 115, 1053–1064. [Google Scholar] [CrossRef]
- Pons, X.; Solé-Sugrañes, L. A simple radiometric correction model to improve automatic mapping of vegetation from multispectral satellite data. Remote Sens. Environ. 1994, 48, 191–204. [Google Scholar] [CrossRef]
- Chavez, P.S. Image-based atmospheric corrections-revisited and improved. Photogramm. Eng. Remote Sens. 1996, 62, 1025–1035. [Google Scholar]
- McGovern, E.A.; Holden, N.M.; Ward, S.M.; Collins, J.F. The radiometric normalization of multitemporal Thematic Mapper imagery of the midlands of Ireland-a case study. Int. J. Remote Sens. 2002, 23, 751–766. [Google Scholar] [CrossRef]
- Pons, X.; Pesquer, L.; Cristóbal, J.; González-Guerrero, O. Automatic and improved radiometric correction of landsat imageryusing reference values from MODIS surface reflectance images. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 243–254. [Google Scholar] [CrossRef]
- Díaz-Delgado, R.; Bustamante, J.; Aragonés, D.; Pacios, F. Determining water body characteristics of Doñana shallow marshes through remote sensing. In Proceedings of the International Geoscience and Remote Sensing Symposium, Denver, CO, USA, 2006.
- Díaz-Delgado, R.; Aragonés, D.; Ameztoy, I.; Bustamante, J. Monitoring marsh dynamics through remote sensing. In Conservation Monitoring in Freshwater Habitats; Hurford, C., Scheneider, M., Cowx, I., Eds.; Springer: New York, NY, USA, 2010; pp. 375–386. [Google Scholar]
- Bilge, F.; Yazici, B.; Dogeroglu, T.; Ayday, C. Statistical evaluation of remotely sensed data for water quality monitoring. Int. J. Remote Sens. 2003, 24, 5317–5326. [Google Scholar] [CrossRef]
- Montesinos, S.; Castaño, S.M. Monitoring of Wetlands Evolution; European Comission: Madrid, España, 1999. [Google Scholar]
- Domínguez Gómez, J.A. Estudio de la Calidad del Agua de Lagunas de Gravera Mediante Teledetección. Ph.D. Thesis, Universidad de Alcalá de Henares, Alcalá de Henares, Madrid, 2003. [Google Scholar]
- Ordoyne, C.; Friedl, M.A. Using MODIS data to characterize seasonal inundation patterns in the Florida Everglades. Remote Sens. Environ. 2008, 112, 4107–4119. [Google Scholar] [CrossRef]
- Kyu-Shun, L.K.; Yeo-Sang, Y.; Sang-Ming, S. Spectral characteristics of shallow turbid water near the shoreline on in ter-tidal flat. Korean J. Remote Sens. 2001, 17, 131–139. [Google Scholar]
- Bustamante, J.; Díaz-Delgado, R.; Aragonés, D. Determinación de las características de masas de aguas someras en las marismas de Doñana mediante teledetección. Rev. Teledetec. 2005, 24, 107–111. [Google Scholar]
- Cohen, J. A Coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Lillesand, T. Remote Sensing and Image Interpretation, 6th Revised Edition; Wiley: Hoboken, NJ, USA, 2008. [Google Scholar]
- Pradhan, B. Remote sensing and GIS-based landslide hazard analysis and cross-validation using multivariate logistic regression model on three test areas in Malaysia. Adv. Space Res. 2010, 45, 1244–1256. [Google Scholar] [CrossRef]
- Foody, G.M.; Mathur, A. A relative evaluation of multiclass image classification by support vector machines. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1335–1343. [Google Scholar] [CrossRef]
- Díaz-Delgado, R.; Lloret, F.; Pons, X. Spatial patterns of fire occurrence in Catalonia, NE, Spain. Landsc. Ecol. 2004, 19, 731–745. [Google Scholar] [CrossRef]
- Hoaglin, D.C.; Mosteller, F.; Tukey, J.W. Understanding Robust and Exploratory Data Analysis; John Wiley & Sons: New York, NY, USA, 2000. [Google Scholar]
- Anyamba, A.; Tucker, J.C.; Eastman, J.R. NDVI anomaly patterns over Africa during the 1997/98 ENSO warm event. Int. J. Remote Sens. 2001, 22, 1847–1859. [Google Scholar]
- Fernández-Delgado, C. Doñana fish species threats affecting a community in decline. In Doñana, Water and Biosphere; Confederación Hidrográfica del Guadalquivir. Ministerio de Medio Ambiente: Madrid, España, 2006; pp. 237–242. [Google Scholar]
- Ibáñez, E.; Gili, J.A.; Ripollès, J.D.; Bayán, B. MDT de precisión de la marisma del P.N. de Doñana mediante láser escáner aerotransportado (LIDAR). Rev. Inst. Naveg. Esp. Publ. Téc. Cuatrimest. Naveg. Marítima Aérea Espac. Terr. 2007, 14–25. [Google Scholar]
- Frisch, D.; Moreno-Ostos, E.; Green, A.J. Species richness and distribution of copepods and cladocerans and their relation to hydroperiod and other environmental variables in Doñana, south-west Spain. Hydrobiologia 2006, 556, 327–340. [Google Scholar] [CrossRef]
- Frisch, D.; Rodríguez-Pérez, H.; Green, A.J. Invasion of artificial ponds in Doñana Natural Park, southwest Spain, by an exotic estuarine copepod. Aquat. Conserv. Mar. Freshw. Ecosyst. 2006, 16, 483–492. [Google Scholar] [CrossRef]
- Santamaría, L.; Green, A.; Díaz-Delgado, R.; Bravo, M.Á.; Castellanos, E. Caracoles: A new laboratory for science and wetland restoration. In Doñana, Water and Biosphere; Confederación Hidrográfica del Guadalquivir. Ministerio de Medio Ambiente: Madrid, España, 2006; pp. 313–315. [Google Scholar]
- Sebastián-González, E.; Green, A.J. Reduction of avian diversity in created versus natural and restored wetlands. Ecography 2016, in press. [Google Scholar]
- Equipo de Seguimiento de Doñana; ICTS-Reserva Biológica de Doñana (EBD-CSIC). Memoria del año hidrometeorológico 2007–2008. Programa de Seguimiento de Procesos y Recursos Naturales en el Espacio Natural Doñana; Dirección General de Espacios Naturales y Participación Ciudadana. Junta de Andalucía—Estación Biológica de Doñana (CSIC): Sevilla, España, 2008; p. 199. [Google Scholar]
- García-Novo, F.; García, J.C.E.; Carotenuto, L.; Sevilla, D.G.; Faso, R.P.F.L. The restoration of El Partido stream watershed (Doñana Natural Park): A multiscale, interdisciplinary approach. Ecol. Eng. 2007, 30, 122–130. [Google Scholar] [CrossRef]
- Báez, J.C.; Real, R.; López-Rodas, V.; Costas, E.; Salvo, A.E.; García-Soto, C.; Flores-Moya, A. The North Atlantic Oscillation and the Arctic Oscillation favour harmful algal blooms in SW Europe. Harmful Algae 2014, 39, 121–126. [Google Scholar] [CrossRef]
- Chans, J.J.; Díaz-Delgado, R. Monitoring and Evaluation: The key to the Doñana 2005 Restoration Project. In Doñana, Water and Biosphere; Confederación Hidrográfica del Guadalquivir. Ministerio de Medio Ambiente: Madrid, España, 2006; pp. 319–326. [Google Scholar]
- Espinar, J.L.; García, L.V.; García Murillo, P.; Toja, J. Submerged macrophyte zonation in a Mediterranean salt marsh: A facilitation effect from established helophytes? J. Veg. Sci. 2002, 13, 831–840. [Google Scholar] [CrossRef]
- Kloskowski, J.; Green, A.J.; Polak, M.; Bustamante, J.; Krogulec, J. Complementary use of natural and artificial wetlands by waterbirds wintering in Doñana, south-west Spain. Aquat. Conserv. Mar. Freshw. Ecosyst. 2009, 19, 815–826. [Google Scholar] [CrossRef]
- Ramo, C.; Aguilera, E.; Figuerola, J.; Máñez, M.; Green, A.J. Long-term population trends of colonial wading birds breeding in Doñana (SW Spain) in relation to environmental and anthropogenic factors. Ardeola 2013, 60, 305–326. [Google Scholar] [CrossRef]
- Márquez-Ferrando, R.; Figuerola, J.; Hooijmeijer, J.C.E.W.; Piersma, T. Recently created man-made habitats in Doñana provide alternative wintering space for the threatened Continental European black-tailed godwit population. Biol. Conserv. 2014, 171, 127–135. [Google Scholar] [CrossRef]
- Toral, G.M.; Aragonés, D.; Bustamante, J.; Figuerola, J. Using Landsat images to map habitat availability for waterbirds in rice fields. Ibis 2011, 153, 684–694. [Google Scholar] [CrossRef]
- Rendón, M.A.; Green, A.J.; Aguilera, E.; Almaraz, P. Status, distribution and long-term changes in the waterbird community wintering in Doñana, south–west Spain. Biol. Conserv. 2008, 141, 1371–1388. [Google Scholar] [CrossRef]
- Ramírez, F.; Navarro, J.; Afán, I.; Hobson, K.A.; Delgado, A.; Forero, M.G. Adapting to a changing world: Unraveling the role of man-made habitats as alternative feeding areas for slender-billed gull (Chroicocephalus genei). PLoS ONE 2012, 7. [Google Scholar] [CrossRef]
- Sergio, F.; Blas, J.; López, L.; Tanferna, A.; Díaz-Delgado, R.; Donázar, J.A.; Hiraldo, F. Coping with uncertainty: Breeding adjustments to an unpredictable environment in an opportunistic raptor. Oecologia 2011, 166, 79–90. [Google Scholar] [CrossRef] [PubMed]
- Díaz-Delgado, R. Servidor de Imágenes Landsat y productos derivados de Doñana. Available online: http://venus.ebd.csic.es/imgs/ (accessed on 15 September 2016).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Units | Categories/Range |
|---|---|---|
| Turbidity | Nefelometric Turbid Units (NTU) | Continuous (0–653) |
| Water Depth | Centimeter | Continuous (0–140) |
| Water conductivity | microSiemens/cm2 | Continuous (300–42,700) |
| Dry bare-ground cover | Percent per pixel | 0%, 1%–5%, 5%–25%, 25%–75%, >75% |
| Plant type | Plant dominant species | Emergent, floating, submerged, algae |
| Plant status | Alive/Dead | % Green/% Dry |
| Plant cover per plant type | Percent per pixel | 0%, 1%–5%, 5%–25%, 25%%–75%, >75% |
| Alien spp abundance | Percent per pixel | 0%, 1%–5%, 5%–25%, 25%–50%, 50%–75%, >75% |
| Open water | Percent per pixel | 0%, 1%–5%, 5%–25%, 25%–75%, >75% |
| Flood cover | Percent per pixel | 0%, 1%–5%, 5%–25%, 25%–75%, >75% |
| Method | Mean Accuracy | Mean Kappa |
|---|---|---|
| Maximum Likelihood | 0.78 (0.14) | 0.50 (0.23) |
| Mahalanobis Distance | 0.80 (0.13) | 0.55 (0.23) |
| Discriminant Analysis | 0.84 (0.07) | 0.62 (0.16) |
| Logistic Regression | 0.85 (0.06) | 0.61 (0.16) |
| Classification Tree | 0.85 (0.06) | 0.64 (0.14) |
| Discarded Scene Models | ρ Threshold | Global Accuracy | Kappa | N |
|---|---|---|---|---|
| 25 March 2004 | 0.188 | 0.955 | 0.429 | 112 |
| 11 February 2006 | 0.185 | 0.980 | 0.912 | 50 |
| 8 April 2006 | 0.184 | 0.980 | 0.878 | 50 |
| 2 May 2006 | 0.182 | 0.981 | 0.922 | 53 |
| 3 June 2006 | 0.189 | 0.858 | 0.325 | 122 |
| 10 November 2006 | 0.180 | 0.946 | 0.817 | 93 |
| 2 March 2007 | 0.190 | 0.928 | 0.418 | 138 |
| 18 March 2007 | 0.184 | 0.914 | 0.560 | 160 |
| All scenes model | 0.186 | 0.933 | 0.605 | 778 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Díaz-Delgado, R.; Aragonés, D.; Afán, I.; Bustamante, J. Long-Term Monitoring of the Flooding Regime and Hydroperiod of Doñana Marshes with Landsat Time Series (1974–2014). Remote Sens. 2016, 8, 775. https://doi.org/10.3390/rs8090775
Díaz-Delgado R, Aragonés D, Afán I, Bustamante J. Long-Term Monitoring of the Flooding Regime and Hydroperiod of Doñana Marshes with Landsat Time Series (1974–2014). Remote Sensing. 2016; 8(9):775. https://doi.org/10.3390/rs8090775
Chicago/Turabian StyleDíaz-Delgado, Ricardo, David Aragonés, Isabel Afán, and Javier Bustamante. 2016. "Long-Term Monitoring of the Flooding Regime and Hydroperiod of Doñana Marshes with Landsat Time Series (1974–2014)" Remote Sensing 8, no. 9: 775. https://doi.org/10.3390/rs8090775
APA StyleDíaz-Delgado, R., Aragonés, D., Afán, I., & Bustamante, J. (2016). Long-Term Monitoring of the Flooding Regime and Hydroperiod of Doñana Marshes with Landsat Time Series (1974–2014). Remote Sensing, 8(9), 775. https://doi.org/10.3390/rs8090775