
The Impact of the Calibration Method on the Accuracy of Point Clouds Derived Using Unmanned Aerial Vehicle Multi-View Stereopsis


Abstract
:
1. Introduction
2. Experimental Section
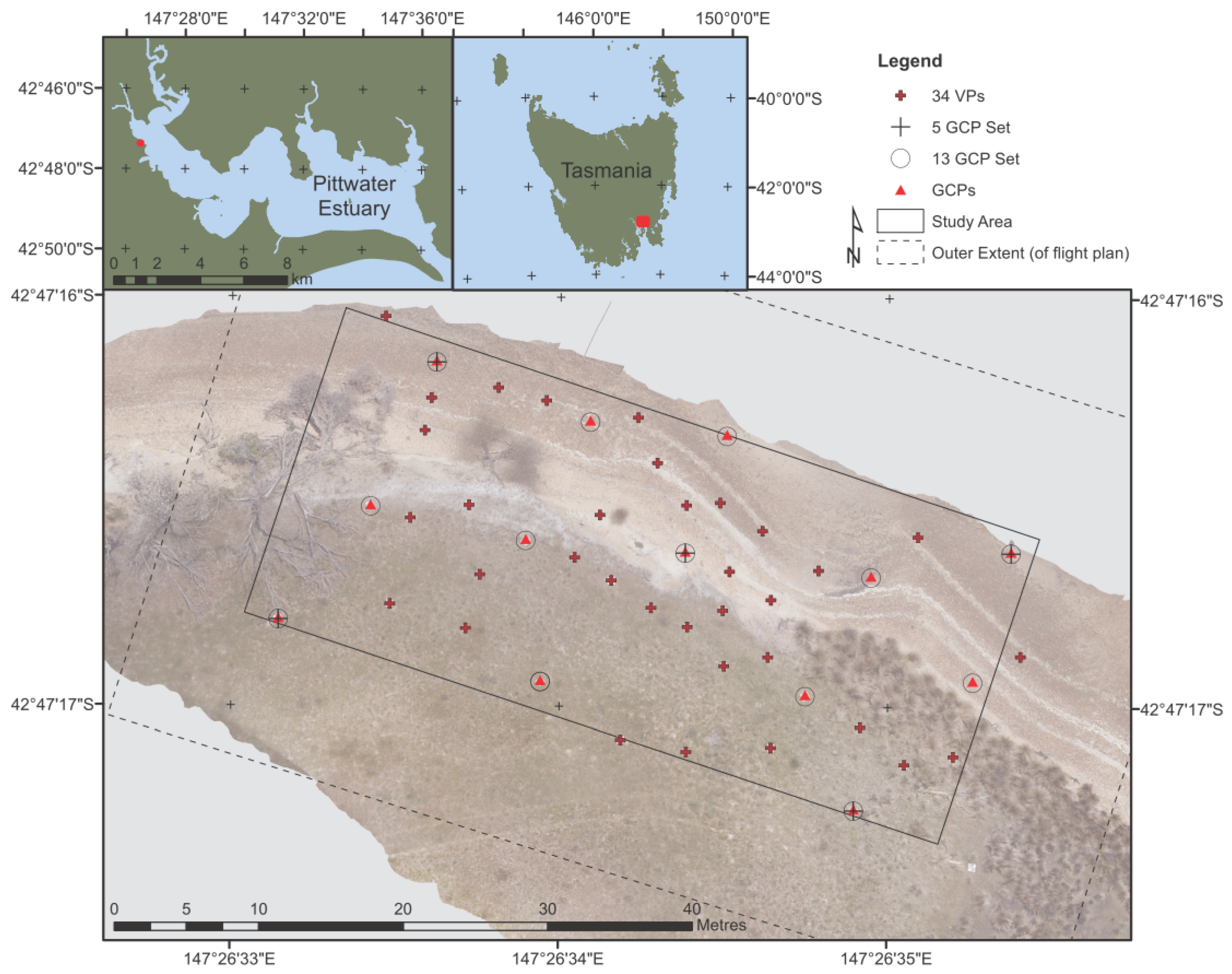
2.1. Study Site
2.2. Hardware

2.3. Ground Control and Validation Point Distribution

2.4. Precise Total Station Survey
2.5. Degradation of Precise Total Station GCPs to Typical DGPS Accuracy
2.6. UAV Survey
2.6.1. Flights for Pre-Calibration
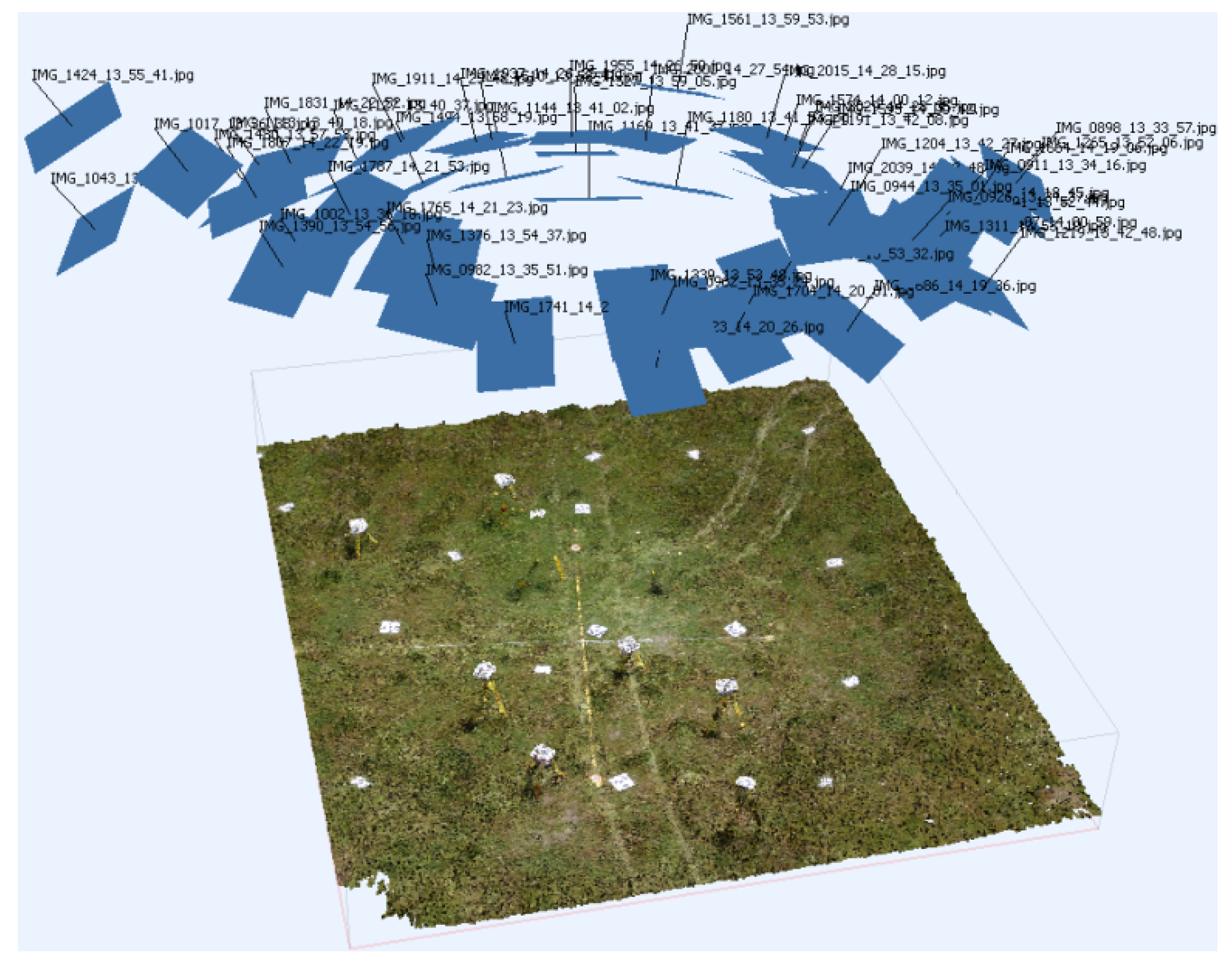
2.6.2. Study Site Flights
2.7. Scenarios

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scenario Code | Calibration Type | Calibration Software | GCP σ | GCP Count | Oblique |
|---|---|---|---|---|---|
| (mm) | <N> | (Yes/No) | |||
| Lens13GCP2mm | Checker board | Lens | 2 | 13 | No |
| Lens13GCP2mmObl | Checker board | Lens | 2 | 13 | Yes |
| PS13GCP2mm | Target field | PhotoScan | 2 | 13 | No |
| PS13GCP2mmObl | Target field | PhotoScan | 2 | 13 | Yes |
| Pre<N>GCP0mm (e.g., “Pre5GCP0mm”) | Target field | CalibCam | 0 | 5,13 | No |
| Pre<N>GCP0mmObl | Target field | CalibCam | 0 | 5, 13 | Yes |
| Pre<N>GCP2mm | Target field | CalibCam | 2 | 5, 13 | No |
| Pre<N>GCP2mmObl | Target field | CalibCam | 2 | 5, 13 | Yes |
| Pre<N>GCP22mm | Target field | CalibCam | 22 | 5, 13 | No |
| Pre<N>GCP22mmObl | Target field | CalibCam | 22 | 5, 13 | Yes |
| Self<N>GCP0mm | OTJ self-cal. | PhotoScan | 0 | 5, 13 | No |
| Self<N>GCP0mmObl | OTJ self-cal. | PhotoScan | 0 | 5, 13 | Yes |
| Self<N>GCP2mm | OTJ self-cal. | PhotoScan | 2 | 5, 13 | No |
| Self<N>GCP2mmObl | OTJ self-cal. | PhotoScan | 2 | 5, 13 | Yes |
| Self<N>GCP22mm | OTJ self-cal. | PhotoScan | 22 | 5, 13 | No |
| Self<N>GCP22mmObl | OTJ self-cal. | PhotoScan | 22 | 5, 13 | Yes |
2.8. Calibration Options
2.8.1. Checker Board Pre-Calibration Using Lens
2.8.2. Target Field Pre-Calibration Using PhotoScan
2.8.3. Target Field Pre-Calibration Using CalibCam
2.8.4. “On-The-job” Self-Calibration Using Agisoft PhotoScan
- (a)
- The camera calibration settings were set to either the Lens, PhotoScan or CalibCam pre-calibration parameters and fixed or these parameters were left unfixed for the self-calibration scenarios;
- (b)
- Only the PhotoScan markers corresponding to the GCPs (5 or 13) were used for the final bundle adjustment, and no VPs nor camera positions were used in this step;
- (c)
- The marker coordinates were altered for the DGPS equivalent scenarios;
- (d)
- The estimated standard deviation for horizontal and vertical GCP accuracy (1) was set to either 0 mm, 2 mm or 22 mm and;
- (e)
- The oblique images were turned off for the scenarios with that image set excluded.
2.9. GCP Accuracy (GCP σ)
2.10. GCP Density (GCP Count)
2.11. Inclusion/Exclusion of Oblique Photography
2.12. Accuracy Assessment Using Verification Points
3. Results and Discussion
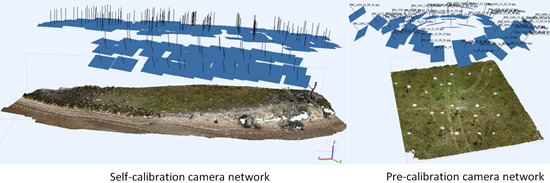
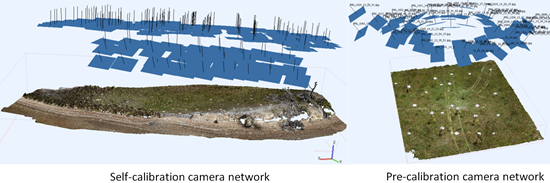
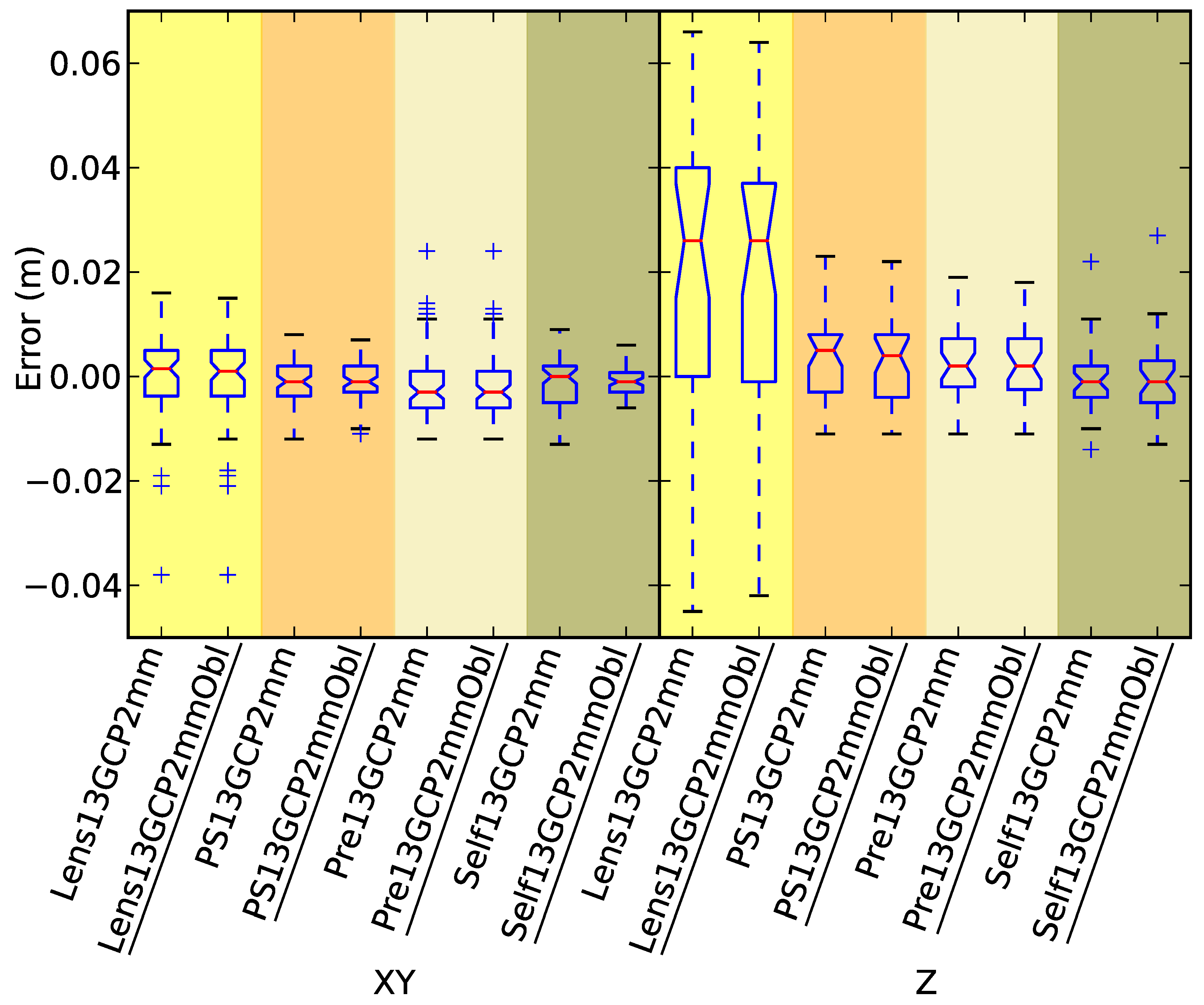
3.1. Calibration Options
- On-the-job calibration using a network that includes oblique photography.
- Either an on-the-job calibration using only nadir photography or a robust pre-calibration.

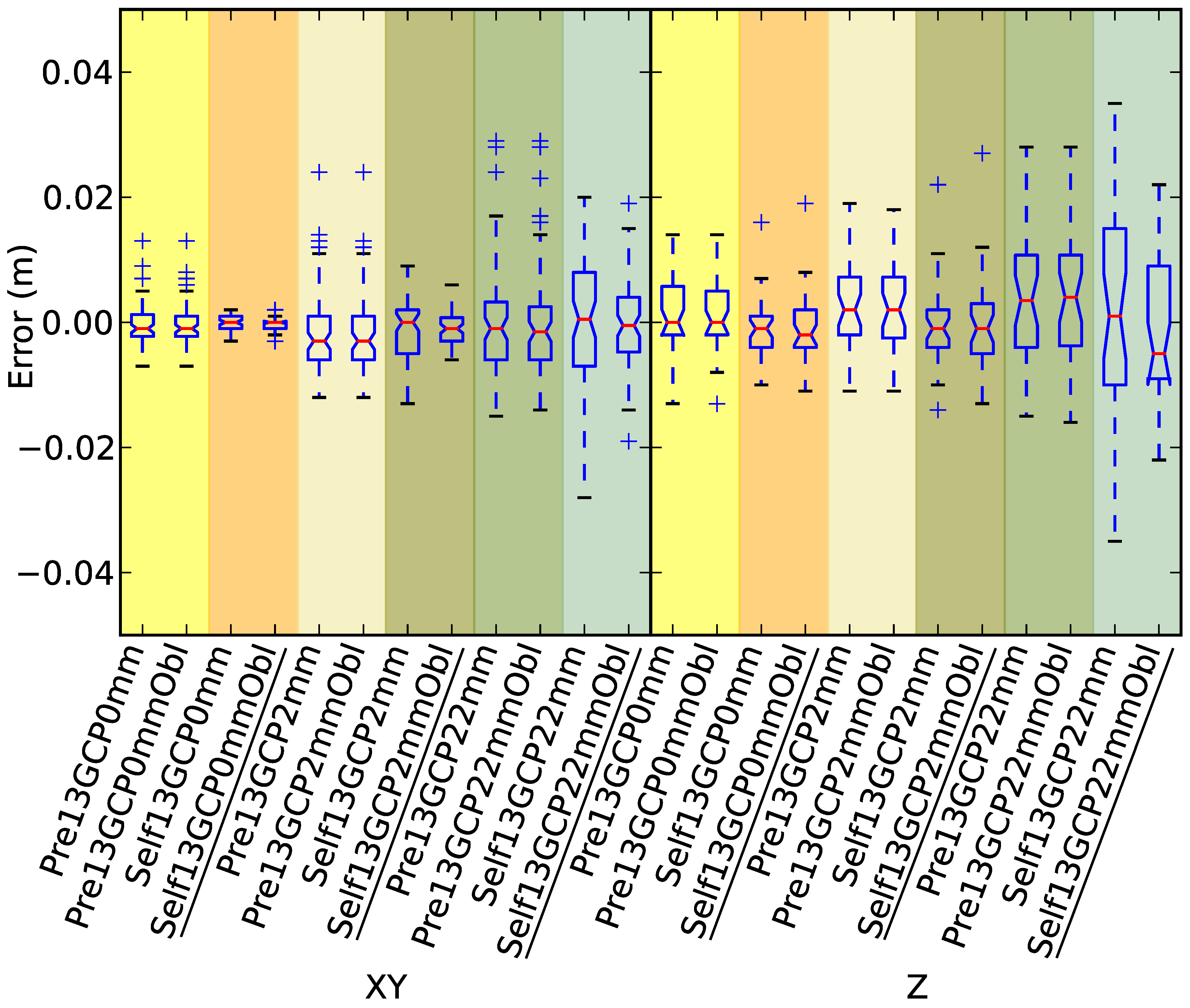
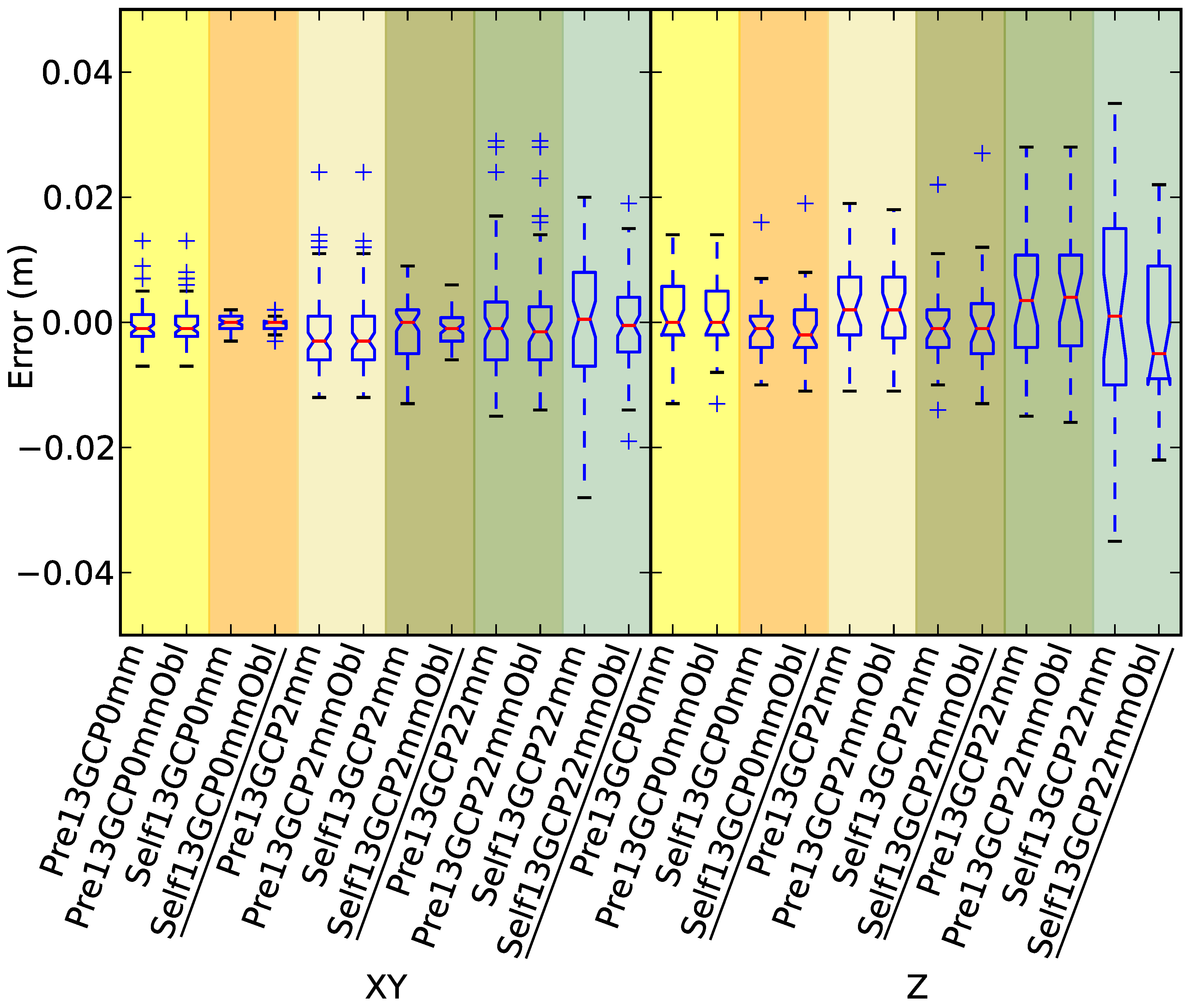
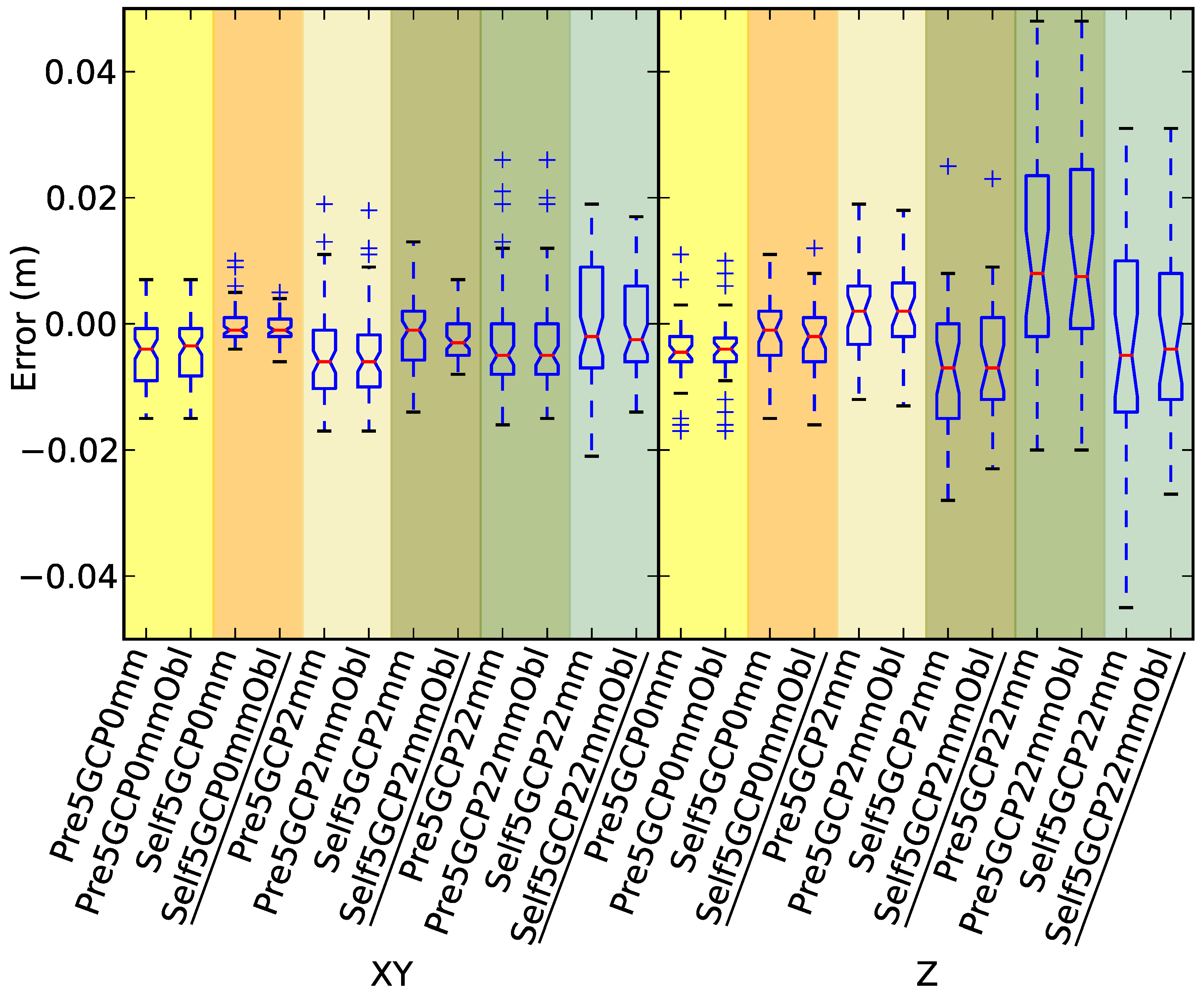
3.2. GCP Accuracy (GCP σ)
| Scenario | RMSE | RMSE |
|---|---|---|
| (mm) | (mm) | |
| Lens13GCP2mm | 8.8 | 41.0 |
| Lens13GCP2mmObl | 8.7 | 39.3 |
| PS13GCP2mm | 4.2 | 8.3 |
| PS13GCP2mmObl | 4.1 | 8.1 |
| Pre13GCP2mm | 7.3 | 7.1 |
| Pre13GCP2mmObl | 7.1 | 7.2 |
| Self13GCP2mm | 5.1 | 6.4 |
| Self13GCP2mmObl | 3.2 | 7.8 |
| Scenario | RMSE | RMSE | Scenario | RMSE | RMSE |
|---|---|---|---|---|---|
| (mm) | (mm) | (mm) | |||
| Pre13GCP0mm | 3.6 | 5.8 | Self13GCP0mm | 1.4 | 5.1 |
| Pre13GCP0mmObl | 3.5 | 5.8 | Self13GCP0mmObl | 1.3 | 5.9 |
| Pre5GCP0mm | 7.0 | 7.3 | Self5GCP0mm | 2.7 | 5.8 |
| Pre5GCP0mmObl | 6.7 | 7.1 | Self5GCP0mmObl | 2.1 | 6.3 |
| Pre13GCP2mm | 7.3 | 7.1 | Self13GCP2mm | 5.1 | 6.4 |
| Pre13GCP2mmObl | 7.1 | 7.2 | Self13GCP2mmObl | 3.2 | 7.8 |
| Pre5GCP2mm | 7.1 | 7.4 | Self5GCP2mm | 6.0 | 13.6 |
| Pre5GCP2mmObl | 8.8 | 7.8 | Self5GCP2mmObl | 4.3 | 11.5 |
| Pre13GCP22mm | 9.1 | 12.4 | Self13GCP22mm | 10.3 | 16.6 |
| Pre13GCP22mmObl | 9.1 | 12.6 | Self13GCP22mmObl | 7.0 | 11.9 |
| Pre5GCP22mm | 8.7 | 20.0 | Self5GCP22mm | 10.5 | 19.8 |
| Pre5GCP22mmObl | 8.6 | 20.0 | Self5GCP22mmObl | 7.3 | 15.9 |
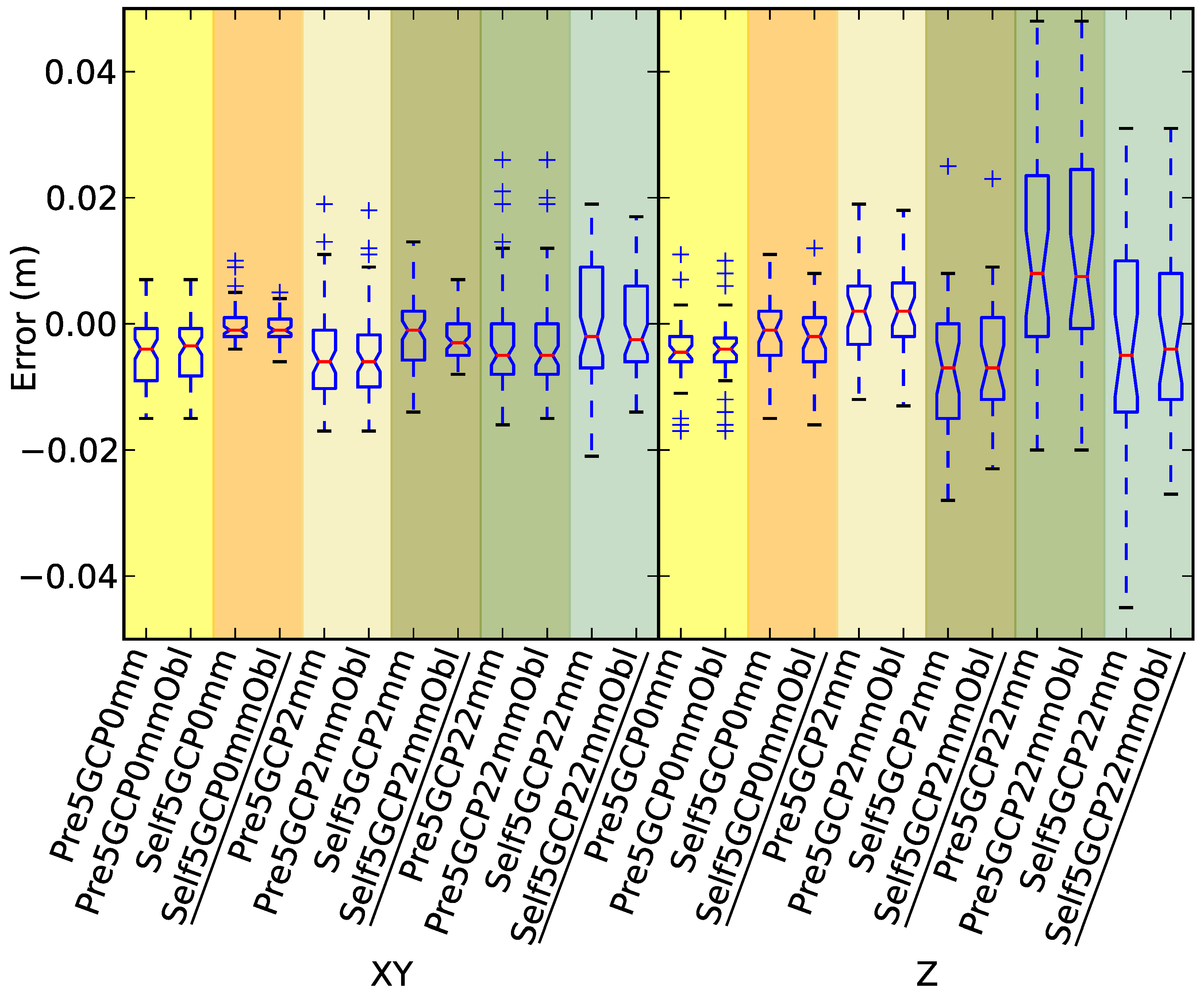
3.3. GCP Density (GCP Count)
4. Conclusions
Acknowledgements
Author Contributions
Conflicts of Interest
References
- Snavely, N.; Seitz, S.M.; Szeliski, R. Modeling the world from internet photo collections. Int. J. Comput. Vis. 2007, 80, 189–210. [Google Scholar] [CrossRef]
- Snavely, N. Bundler: Structure from Motion (SfM) for Unordered Image Collections. Available online: http://www.cs.cornell.edu/snavely/bundler/ (accessed on 27 January 2011).
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vision 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Furukawa, Y.; Ponce, J. Accurate, dense, and robust multi-view stereopsis. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 32, 1362–1376. [Google Scholar] [CrossRef] [PubMed]
- Liu, H. Algorithmic foundation and software tools for extracting shoreline features from remote sensing imagery and LiDAR data. J. Geogr. Inf. Syst. 2011, 3, 99–119. [Google Scholar] [CrossRef]
- Verhoeven, G.; Taelman, D.; Vermeulen, F. Computer vision-based orthophoto mapping of complex archaeological sites: The ancient quarry of itaranha (Portugal-Spain). Archaeometry 2012, 54, 1114–1129. [Google Scholar] [CrossRef]
- Vu, H.H.; Labatut, P.; Pons, J.P.; Keriven, R. High accuracy and visibility-consistent dense multiview stereo. IEEE Trans. Geosci. Remote 2012, 34, 889–901. [Google Scholar] [CrossRef] [PubMed]
- Turner, D.; Lucieer, A.; Wallace, L. Direct georeferencing of ultrahigh-resolution UAV imagery. IEEE Trans. Geosci. Remote 2014, 52, 2738–2745. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery, based on Structure from Motion (SfM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Lucieer, A.; De Jong, S.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geog. 2013, 38, 97–116. [Google Scholar] [CrossRef]
- Lucieer, A.; Robinson, S.; Turner, D. Unmanned aerial vehicle (UAV) remote sensing for hyperspatial terrain mapping of Antarctic moss beds based on Structure from Motion (SfM) point clouds. In Proceedings of the 34th International Symposium on Remote Sensing of Environment, Sydney, NSW, Australia, 10–15 April 2011.
- Harwin, S.; Lucieer, A. Assessing the accuracy of georeferenced point clouds produced via multi-view stereopsis from Unmanned Aerial Vehicle (UAV) imagery. Remote Sens. 2012, 4, 1573–1599. [Google Scholar] [CrossRef]
- Prahalad, V.; Sharples, C.; Kirkpatrick, J.; Mount, R. Is wind-wave fetch exposure related to soft shoreline change in swell-sheltered situations with low terrestrial sediment input? J. Coast. Conserv. 2015, 19, 23–33. [Google Scholar] [CrossRef]
- Tahar, K.N.; Ahmad, A. UAV-based stereo vision for photogrammetric survey in aerial terrain mapping. In Proceedings of the 2011 IEEE International Conference on Computer Applications and Industrial Electronics (ICCAIE), Penang, Malaysia, 4–7 December 2011; pp. 443–447.
- Neitzel, F.; Klonowski, J. Mobile 3D mapping with a low-cost UAV system. ISPRS Arch. 2011, 38, 1–6. [Google Scholar] [CrossRef]
- Rosnell, T.; Honkavaara, E. Point cloud generation from aerial image data acquired by a quadrocopter type micro unmanned aerial vehicle and a digital still camera. Sensors 2012, 12, 453–480. [Google Scholar] [CrossRef] [PubMed]
- Carvajal, F.; Agüera, F.; Pérez, M. Surveying a landslide in a road embankment using Unmanned Aerial Vehicle photogrammetry. ISPRS Arch. 2011, 38, 1–6. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Strecha, C.; von Hansen, C.; Gool, L.V.; Fua, P.; Thoennessen., U. On benchmarking camera calibration and multi-view stereo for high resolution imagery. In Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, AK, USA, 24–26 June 2008.
- Vallet, J.; Panissod, F.; Strecha, C.; Tracol, M. Photogrammetric performance of an ultra light weight swinglet “UAV”. ISPRS Arch. 2011, 38, 253–258. [Google Scholar] [CrossRef]
- James, M.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. 2012, 117, 1–17. [Google Scholar] [CrossRef]
- Flener, C.; Vaaja, M.; Jaakkola, A.; Krooks, A.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Seamless mapping of river channels at high resolution using mobile LiDAR and UAV-Photography. Remote Sens. 2013, 5, 6382–6407. [Google Scholar] [CrossRef]
- Westoby, M.; Brasington, J.; Glasser, N.; Hambrey, M.; Reynolds, J. Structure-from-Motion photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef] [Green Version]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.; Ries, J. Unmanned Aerial Vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef]
- Fraser, C. Automatic camera calibration in close range photogrammetry. Photogramm. Eng. Remote Sens. 2013, 79, 381–388. [Google Scholar] [CrossRef]
- Fraser, C.S.; Ganci, G.; Shortis, M. Multi-sensor system self-calibration. Int. Soc. Opt. Eng. 1995. [Google Scholar] [CrossRef]
- Remondino, F.; Fraser, C.S. Digital camera calibration methods: Considerations and comparisons. In Proceedings of the 2006 ISPRS Commission V Symposium “Image Engineering and Vision Metrology”, Dresden, Germany, 25–27 September 2006.
- James, M.; Quinton, J.N. Ultra-rapid topographic surveying for complex environments: The hand-held mobile laser scanner (HMLS). Earth Surf. Proc. Land. 2014, 39, 138–142. [Google Scholar] [CrossRef]
- Granshaw, S.I. Bundle adjustment methods in engineering photogrammetry. Photogramm. Rec. 1980, 10, 181–207. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Proc. Land. 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Fryer, J. Camera calibration. In Close Range Photogrammetry and Machine Vision; Atkinson, K., Ed.; Whittles Publishing: Caithness, UK, 1996; pp. 156–179. [Google Scholar]
- Wackrow, R.; Chandler, J.; Gardner, T. Minimising systematic errors in DEMs caused by an inaccurate lens model. ISPRS Arch. 2008, 37, 1–6. [Google Scholar]
- Wackrow, R.; Chandler, J.H. Minimising systematic error surfaces in digital elevation models using oblique convergent imagery. Photogramm. Rec. 2011, 26, 16–31. [Google Scholar] [CrossRef] [Green Version]
- Mikrokopter. MikroKopter WIKI. Available online: http://www.mikrokopter.com (accessed on 7 February 2012).
- LISTECH LISCAD; Version 10.1; LISTECH Pty Ltd: Richmond, Victoria, Australia, 2013.
- Leica Geosystems. Leica GPS1200 Brochure. Available online: http://www.leica-geosystems.com/downloads123/zz/gps/general/brochures-datasheet/GPS1200_TechnicalData_en.pdf (accessed on 11 September 2014).
- Agisoft Lens; Version 040.1.1718 beta 64 bit; AgiSoft LLC: Petersburg, Russia, 2014.
- Agisoft PhotoScan; Professional Edition Version 1.0.4.1847 64 bit; AgiSoft LLC: Petersburg, Russia, 2014.
- 3DM CalibCam; Version 2.2a; ADAM Technology: Perth, Australia, 2006.
- Brown, D. Close-range camera calibration. Photogramm. Eng. Remote Sens. 1971, 37, 855–866. [Google Scholar]
- Agisoft PhotoScan. In User Manual: Professional Edition Version 1.0.4.1847 64 bit; AgiSoft LLC: Petersburg, Russia, 2014.
- Agisoft PhotoScan WIKI. Agisoft PhotoScan WIKI. Available online: http://www.agisoft.ru/wiki/PhotoScan/Tips_and_Tricks (accessed on 13 June 2014).
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Woodget, A.S.; Carbonneau, P.E.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution UAS imagery and structure from motion photogrammetry. Earth Surf. Proc. Land. 2015, 40, 47–64. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Harwin, S.; Lucieer, A.; Osborn, J. The Impact of the Calibration Method on the Accuracy of Point Clouds Derived Using Unmanned Aerial Vehicle Multi-View Stereopsis. Remote Sens. 2015, 7, 11933-11953. https://doi.org/10.3390/rs70911933
Harwin S, Lucieer A, Osborn J. The Impact of the Calibration Method on the Accuracy of Point Clouds Derived Using Unmanned Aerial Vehicle Multi-View Stereopsis. Remote Sensing. 2015; 7(9):11933-11953. https://doi.org/10.3390/rs70911933
Chicago/Turabian StyleHarwin, Steve, Arko Lucieer, and Jon Osborn. 2015. "The Impact of the Calibration Method on the Accuracy of Point Clouds Derived Using Unmanned Aerial Vehicle Multi-View Stereopsis" Remote Sensing 7, no. 9: 11933-11953. https://doi.org/10.3390/rs70911933
APA StyleHarwin, S., Lucieer, A., & Osborn, J. (2015). The Impact of the Calibration Method on the Accuracy of Point Clouds Derived Using Unmanned Aerial Vehicle Multi-View Stereopsis. Remote Sensing, 7(9), 11933-11953. https://doi.org/10.3390/rs70911933