
Modifying Geometric-Optical Bidirectional Reflectance Model for Direct Inversion of Forest Canopy Leaf Area Index


Abstract
:
1. Introduction
2. Data and Pre-Processing
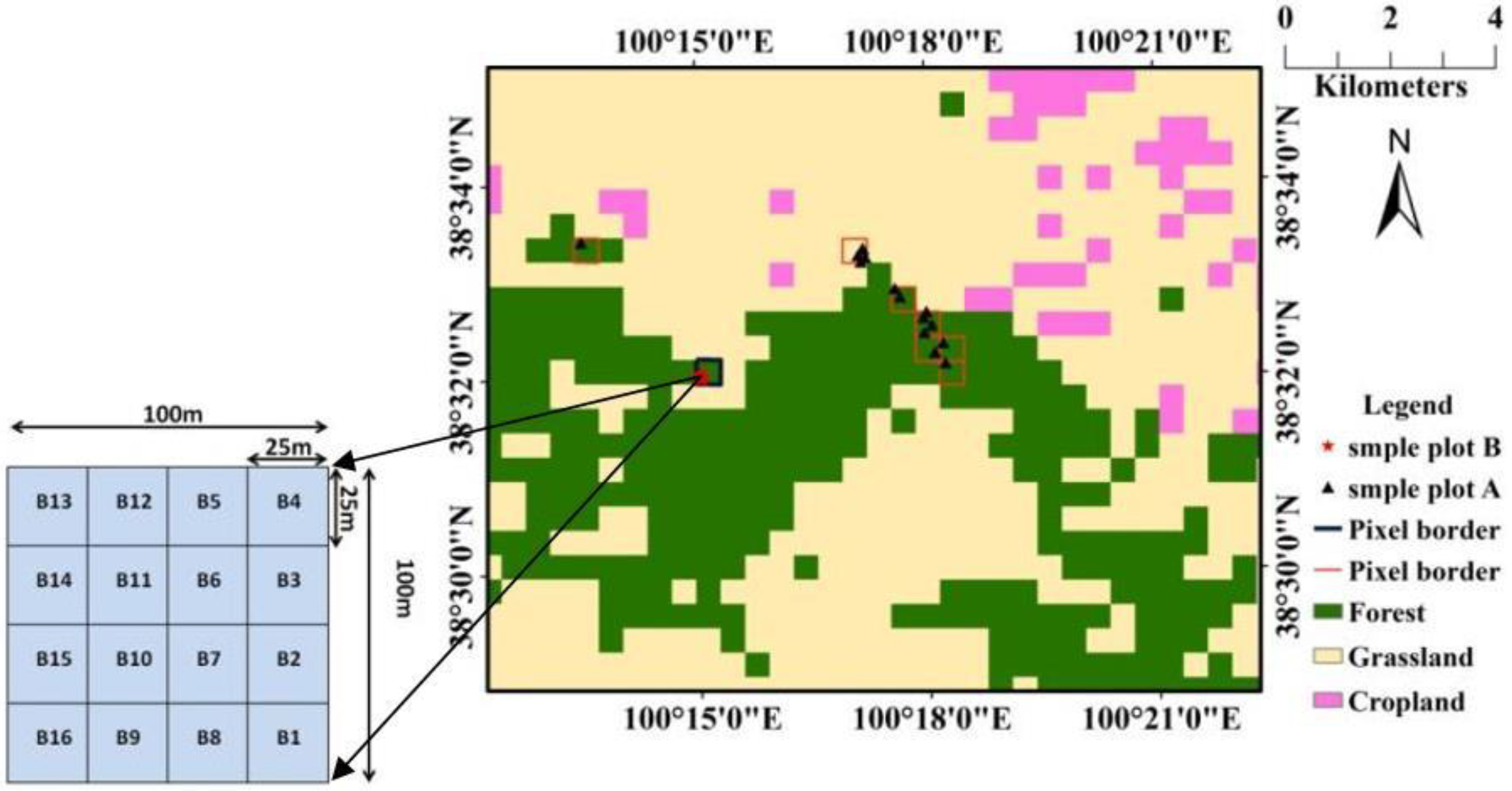
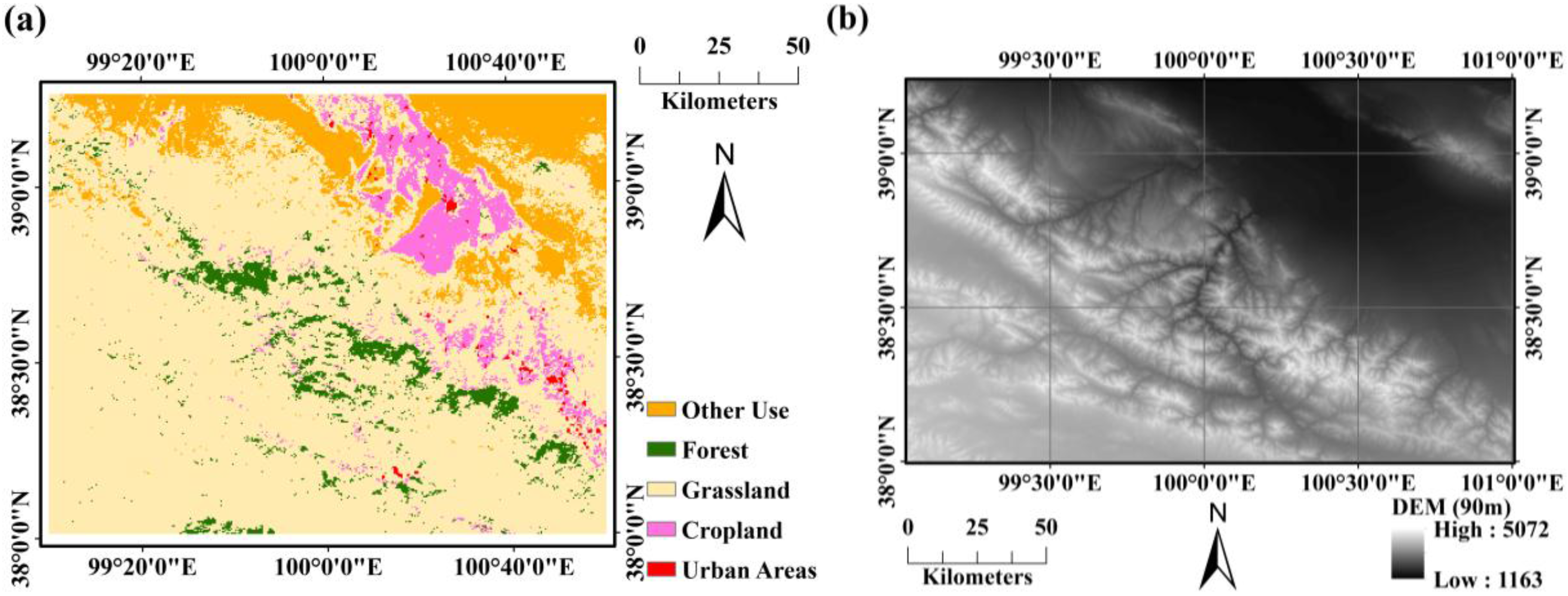
2.1. Study Area

2.2. Data Foundation
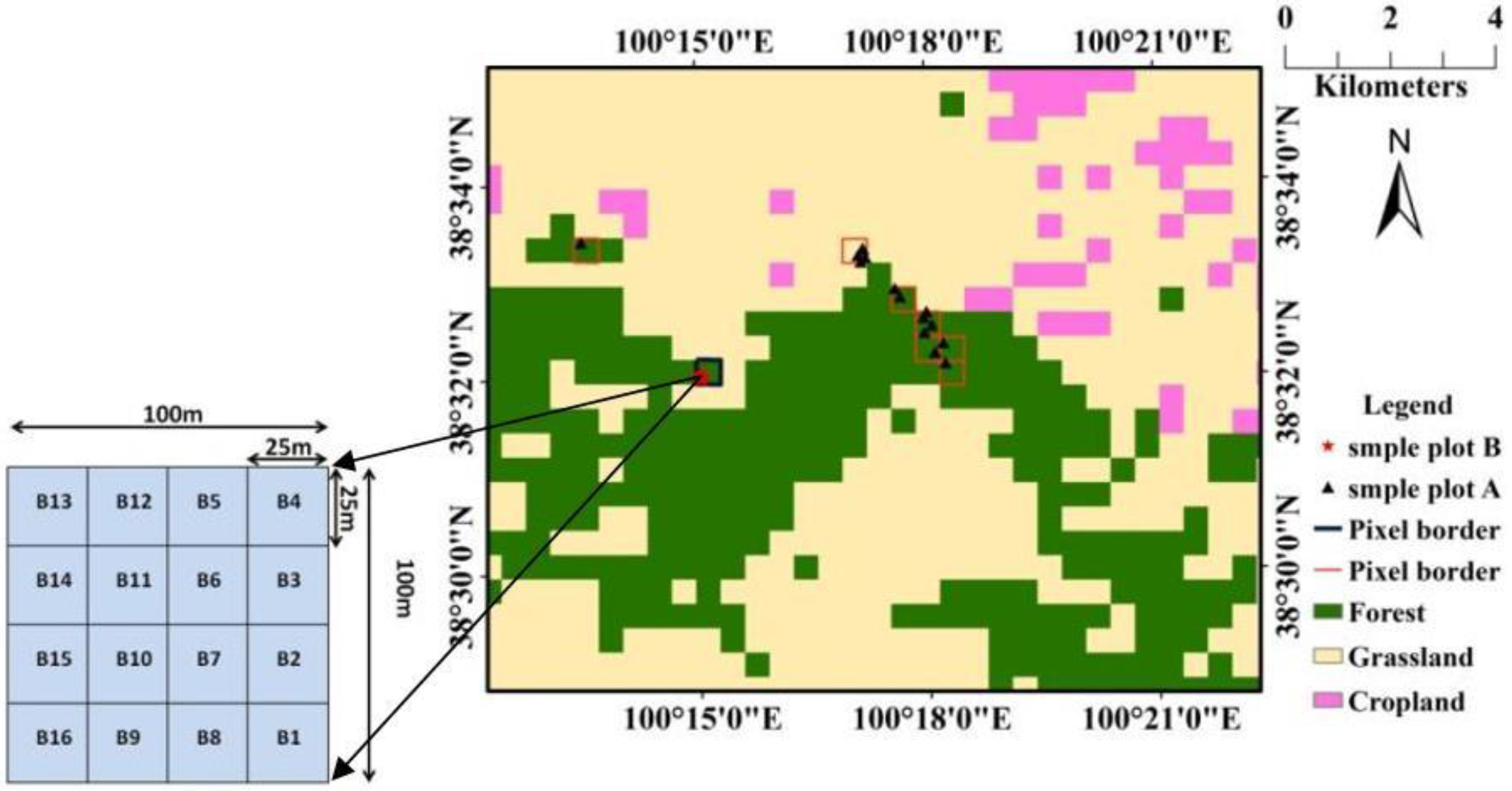
2.2.1. Field-Measured Data
2.2.2. MODIS, MISR, and SPOT Reflectance Data

2.2.3. Airborne LiDAR data
3. Method
3.1. Theoretical Foundation
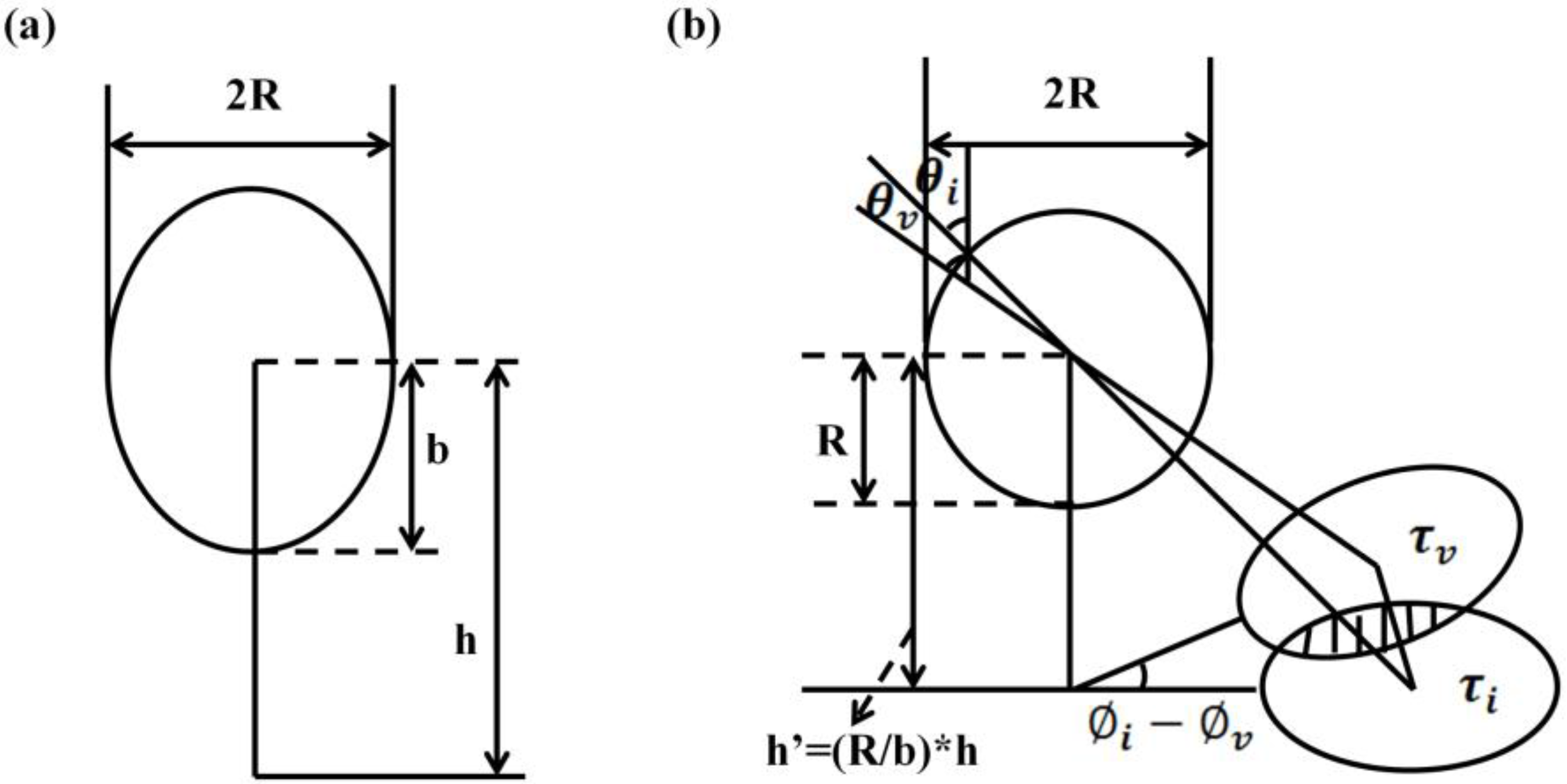
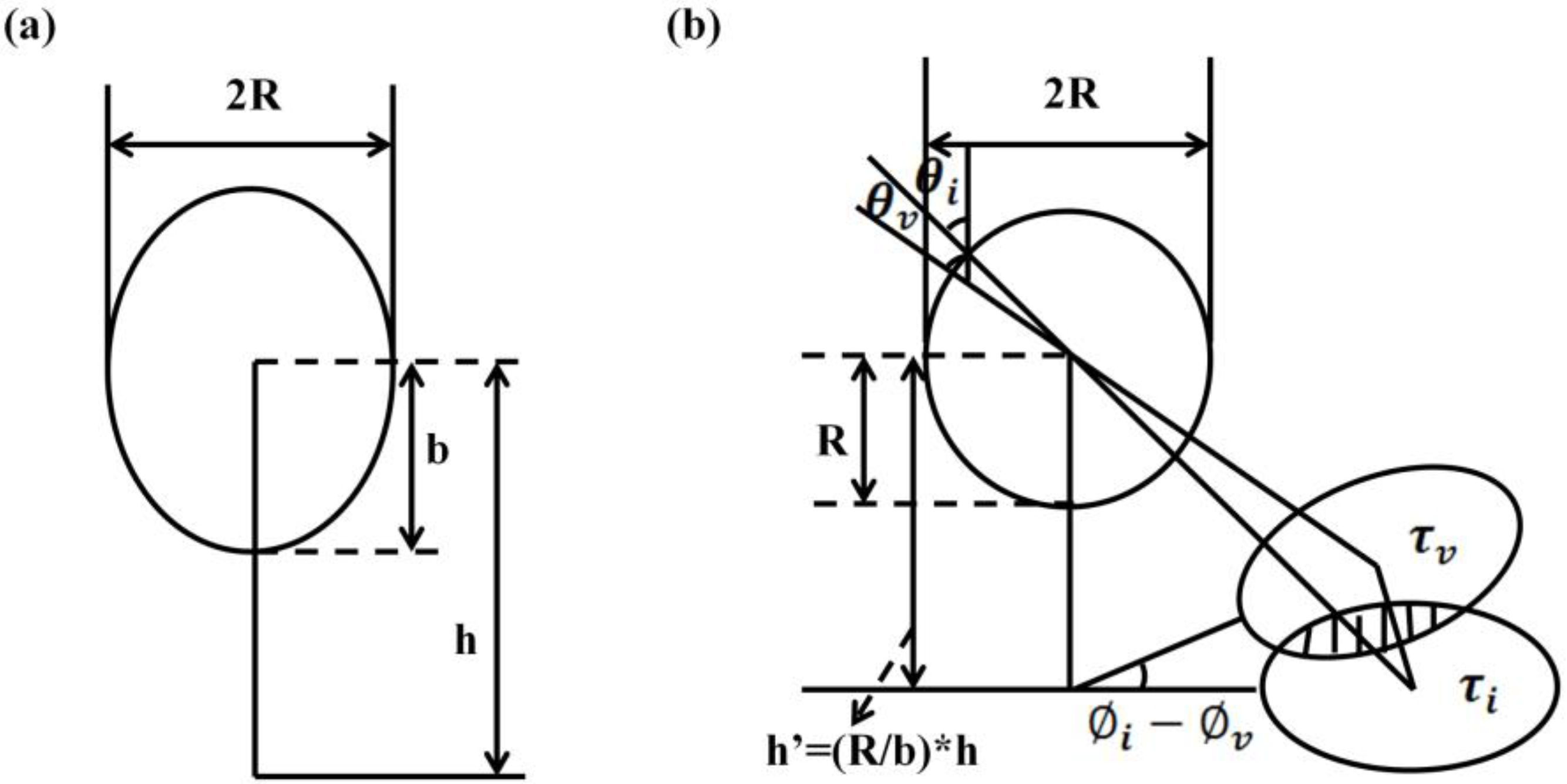
3.1.1. Geometric-Optic Mutual Shadowing Model
3.1.2. Gap Probability Model
3.2. Modifying GOMS Model Using the Gap Probability Model
3.3. LAI Inversion by the MGOMS Model
3.3.1. Input Parameters in the Inversion Process of GOMS and MGOMS Models

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Initial Value | Lower Limit | Upper Limit |
|---|---|---|---|
| NIRG | 0.4225 | 0 | 1 |
| NIRC | 0.384 | 0 | 1 |
| NIRZ | 0.146 | 0 | 0.3 |
| RG | 0.12 | 0 | 1 |
| RC | 0.09 | 0 | 1 |
| RZ | 0.015 | 0 | 0.05 |
| 0.25 | 0.1 | 0.8 | |
| LAI | 2.88 | 0 | 7 |
| n | 0.15 | 0 | 1 |
| q | 0.2 | 0 | 1 |
| b/R | 1.9525 | 0.74 | 7.5 |
| h/b | 2.049 | 1 | 10 |
| 5.5766 | 0 | 50 |
3.3.2. Model Inversion Strategy
4. Results
4.1. MGOMS Model Accuracy Validation
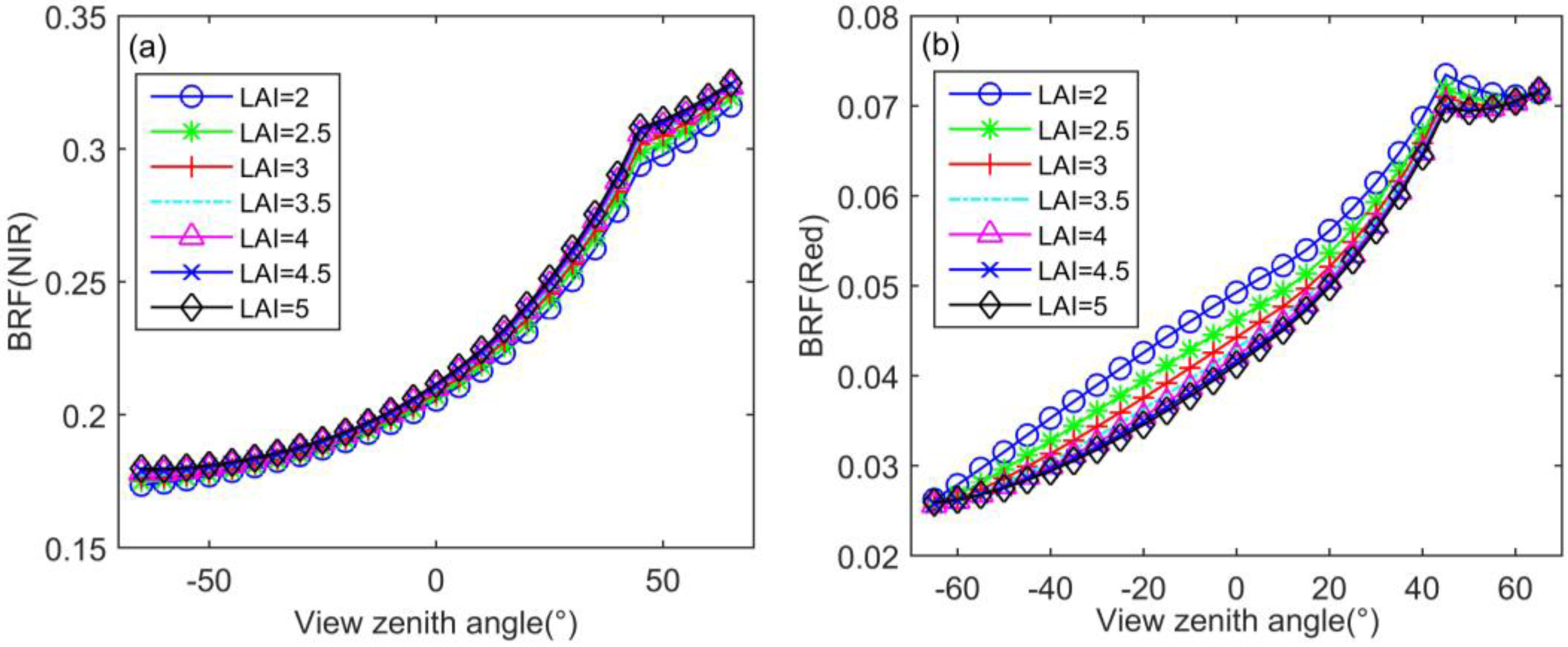
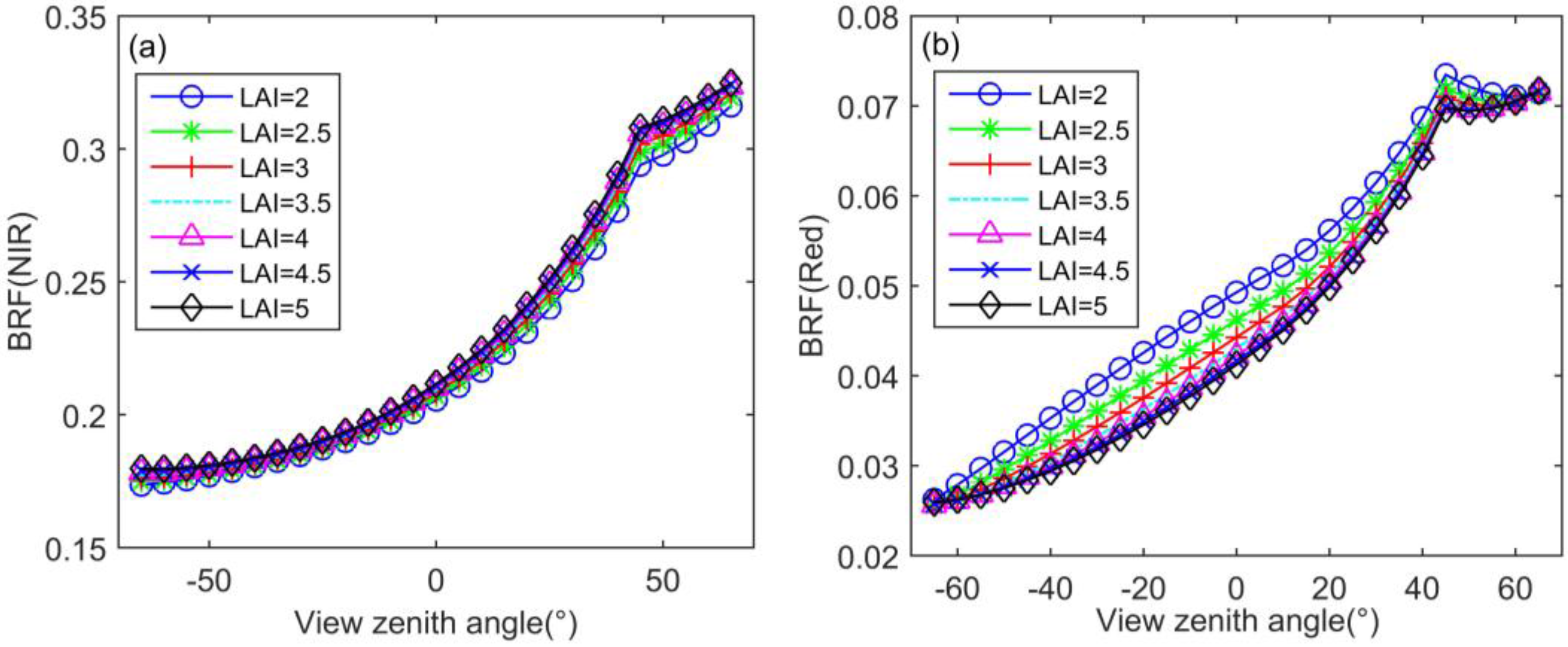
4.1.1. Tendency of the BRF Simulated by MGOMS Model along with the Variation of LAI
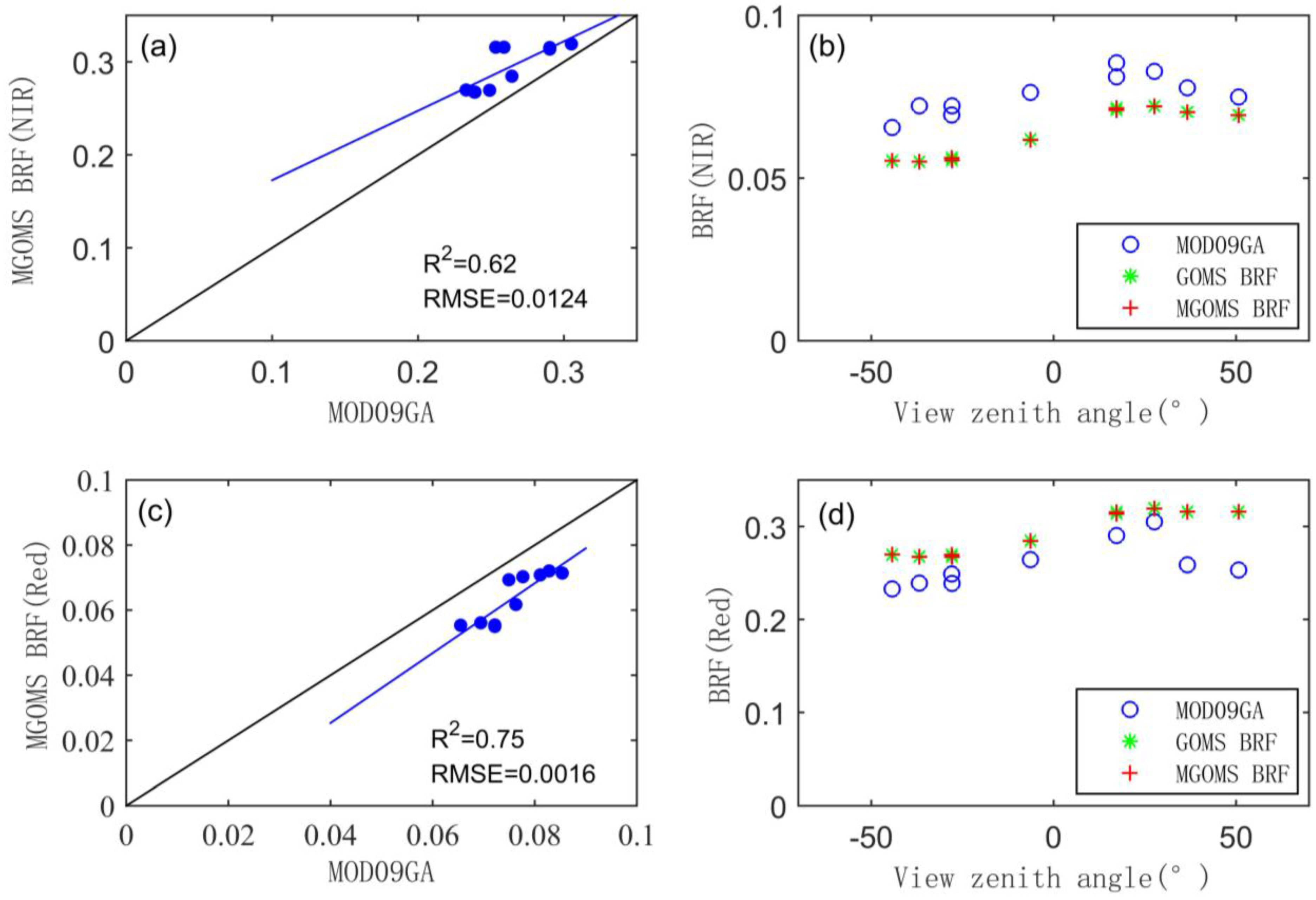
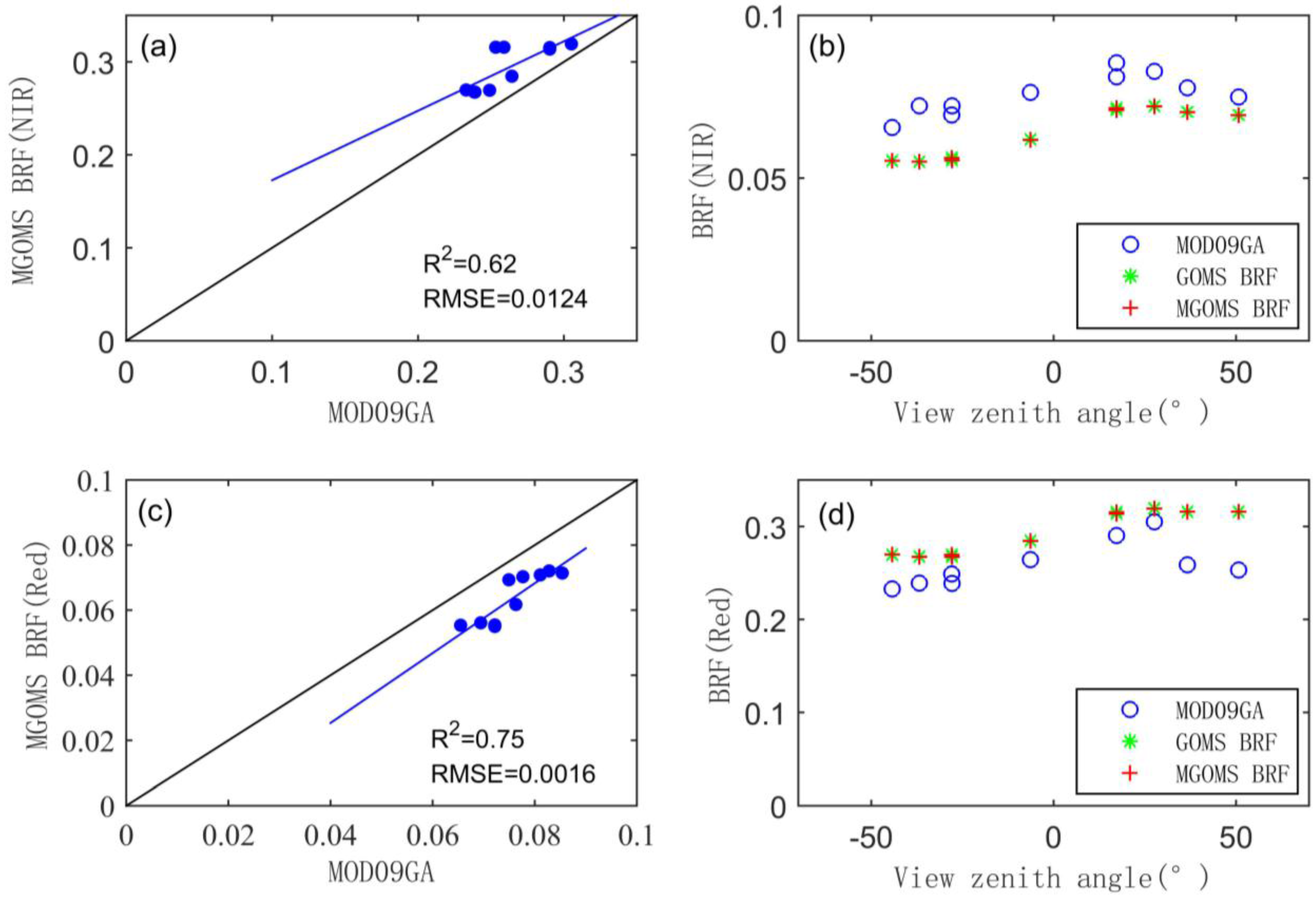
4.1.2. Comparison of the Simulated BRF and MOD09GA BRF
4.2. MGOMS Model Application Validation
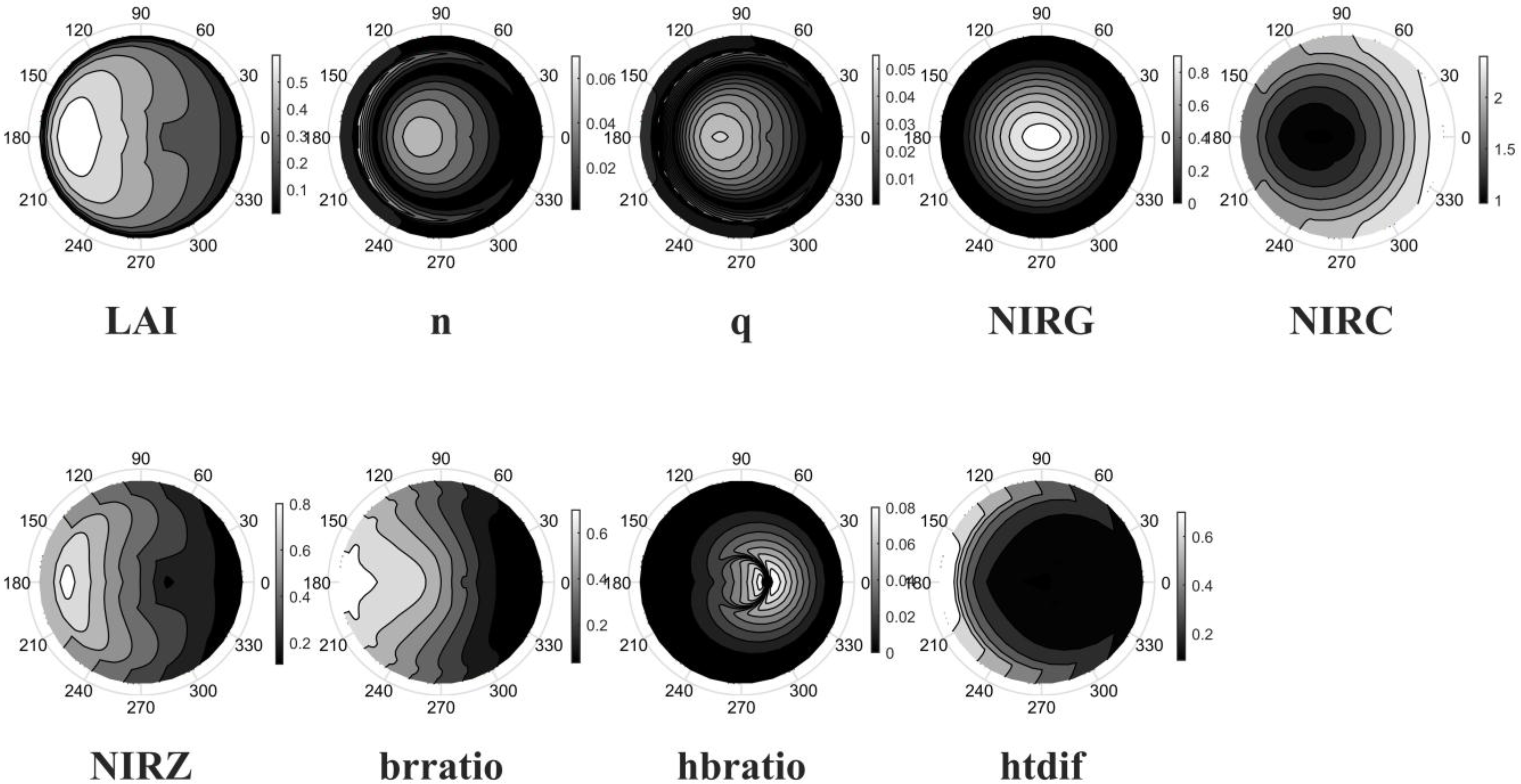
4.2.1. Uncertainty and Sensitivity Analysis of the Parameters in MGOMS Model
| VZA (°) | VAA (°) | NIRG | NIRC | NIRZ | LAI | n | q | b/R | h/b | Δh/b |
|---|---|---|---|---|---|---|---|---|---|---|
| 27.88 | 282.92 | 0.81 | 0.96 | 0.59 | 0.58 | 0.05 | 0.04 | 0.59 | 0.02 | 0.03 |
| 6.39 | 276.92 | 0.95 | 1.00 | 0.44 | 0.48 | 0.05 | 0.04 | 0.54 | 0.04 | 0.07 |
| 17.22 | 99.05 | 0.86 | 1.27 | 0.31 | 0.35 | 0.04 | 0.03 | 0.38 | 0.07 | 0.14 |
| 50.74 | 95.61 | 0.50 | 1.64 | 0.28 | 0.33 | 0.00 | −0.01 | 0.25 | 0.04 | 0.12 |
| 27.58 | 99.47 | 0.72 | 1.44 | 0.29 | 0.33 | 0.03 | 0.03 | 0.31 | 0.07 | 0.17 |
| 44.27 | 284.89 | 0.58 | 1.08 | 0.70 | 0.63 | 0.04 | 0.03 | 0.61 | 0.01 | 0.08 |
| 36.65 | 98.06 | 0.59 | 1.56 | 0.31 | 0.34 | 0.03 | 0.02 | 0.25 | 0.06 | 0.14 |
| 36.86 | 283.61 | 0.70 | 1.02 | 0.65 | 0.61 | 0.05 | 0.04 | 0.60 | 0.01 | 0.06 |
- (1)
- Invert NIRC using the NIR band reflectance datasets with backward-viewing directions and large viewing zenith angles;
- (2)
- Invert NIRG using the NIR band reflectance datasets with small viewing zenith angles;
- (3)
- Invert LAI (LAIJune) using the reflectance datasets for June with forward-viewing directions and large viewing zenith angles.

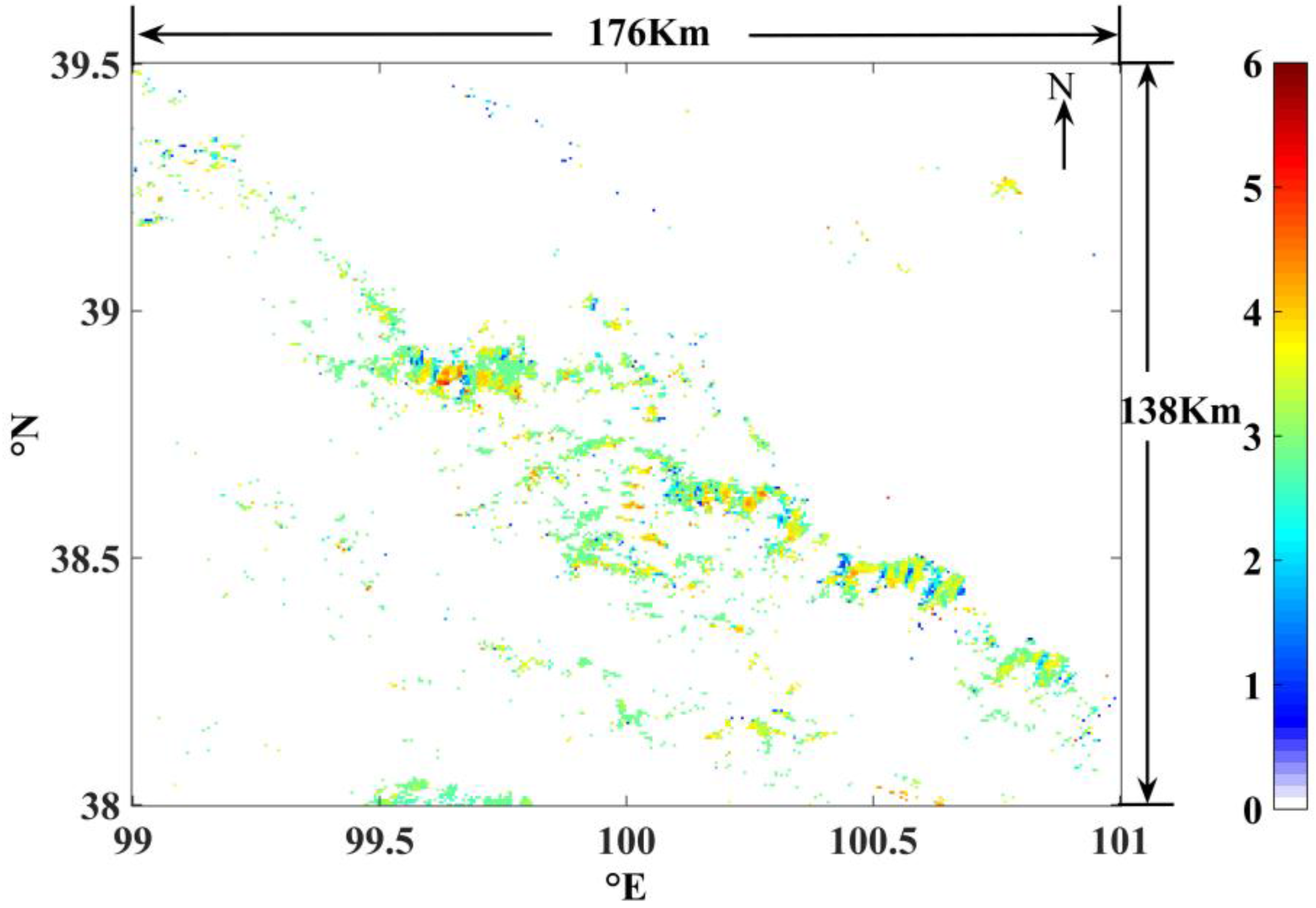
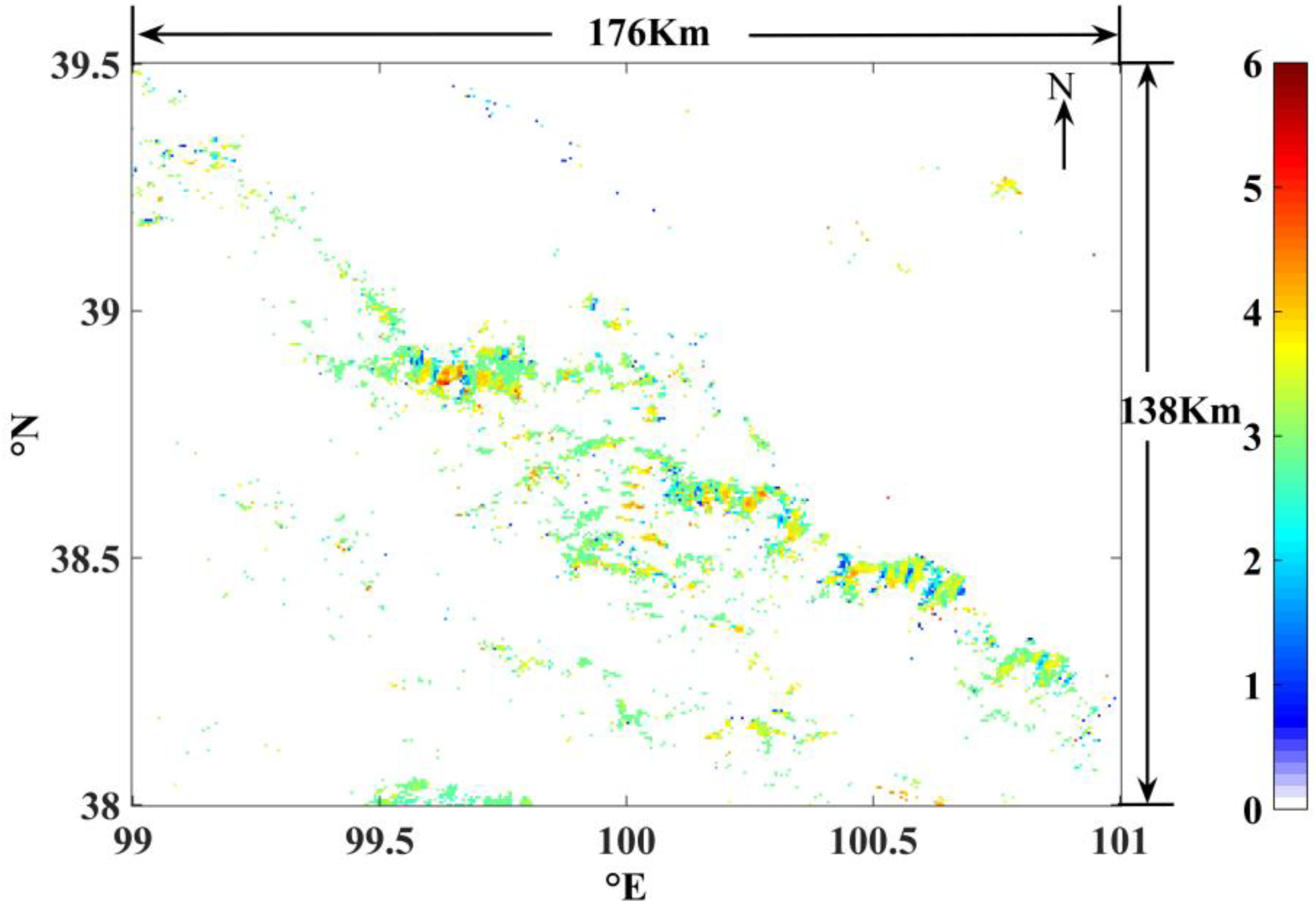
4.2.2. LAI Inversion Based on Retrieved Parameters by MGOMS Model
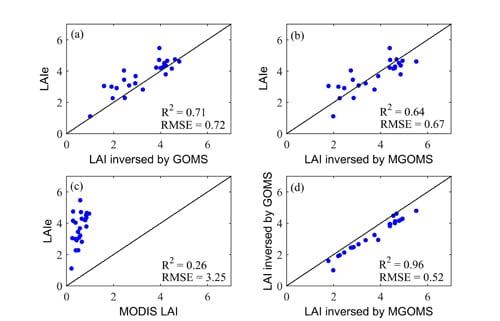
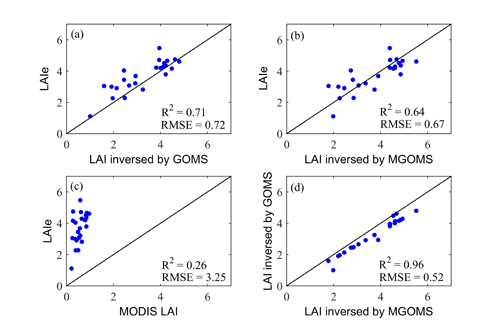
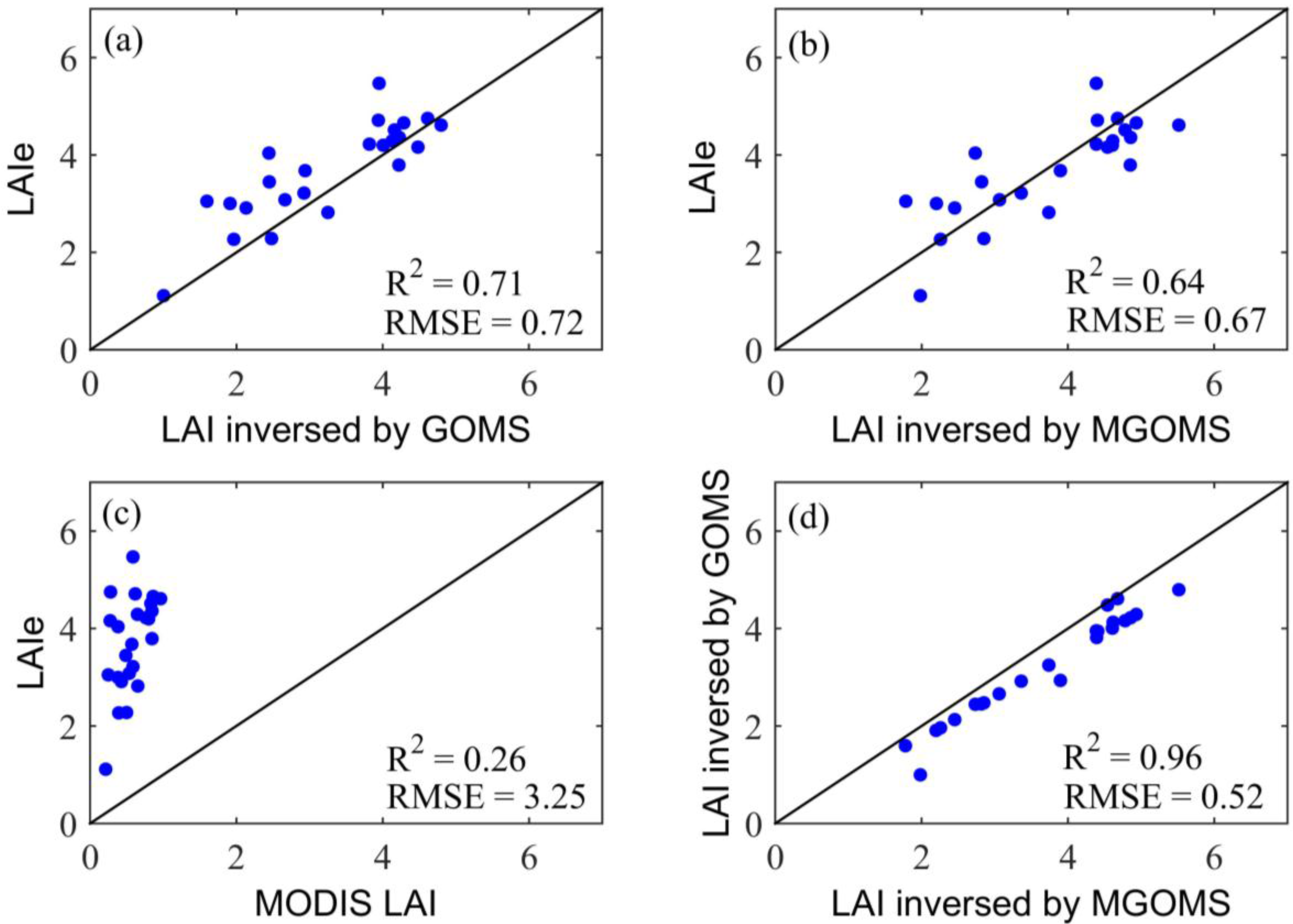
4.2.3. Precision of the Retrieved LAI by MGOMS Model

5. Discussions
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Chen, J.M.; Black, T. Defining leaf area index for non-flat leaves. Plant Cell Environ. 1992, 15, 421–429. [Google Scholar] [CrossRef]
- Che, M.L.; Chen, B.Z.; Zhang, H.F.; Fang, S.F.; Xu, G.; Lin, X.F.; Wang, Y.C. A new equation for deriving vegetation phenophase from time series of leaf area index (LAI) data. Remote Sens. 2014, 6, 5650–5670. [Google Scholar] [CrossRef]
- Zhao, B.; Yao, X.; Tian, Y.C.; Liu, X.J.; Ata-Ul-Karim, S.T.; Ni, J.; Cao, W.X.; Zhu, Y. New critical nitrogen curve based on leaf area index for winter wheat. Agron. J. 2014, 106, 379–389. [Google Scholar] [CrossRef]
- Aboelghar, M.; Ali, A.R.; Arafat, S. Spectral wheat yield prediction modeling using spot satellite imagery and leaf area index. Arabian J. Geosci. 2014, 7, 465–474. [Google Scholar] [CrossRef]
- Qu, Y.H.; Zhu, Y.Q.; Han, W.C.; Wang, J.D.; Ma, M.G. Crop leaf area index observations with a wireless sensor network and its potential for validating remote sensing products. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 431–444. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, Y.; Li, W.L.; Cao, W.X.; Tian, Y.C. Integrating remotely sensed leaf area index and leaf nitrogen accumulation with ricegrow model based on particle swarm optimization algorithm for rice grain yield assessment. J. Appl. Remote Sens. 2014, 8. [Google Scholar] [CrossRef]
- Bal, S.K.; Choudhury, B.U.; Sood, A.; Saha, S.; Mukherjee, J.; Singh, H.; Kaur, P. Relationship between leaf area index of wheat crop and different spectral indices in punjab. J. Agrometeorol. 2013, 15, 98–102. [Google Scholar]
- Biudes, M.S.; Machado, N.G.; Danelichen, V.H.D.; Souza, M.C.; Vourlitis, G.L.; Nogueira, J.D. Ground and remote sensing-based measurements of leaf area index in a transitional forest and seasonal flooded forest in Brazil. Int. J. Biometeorol. 2014, 58, 1181–1193. [Google Scholar] [CrossRef] [PubMed]
- Taugourdeau, S.; le Maire, G.; Avelino, J.; Jones, J.R.; Ramirez, L.G.; Quesada, M.J.; Charbonnier, F.; Gomez-Delgado, F.; Harmand, J.M.; Rapidel, B.; et al. Leaf area index as an indicator of ecosystem services and management practices: An application for coffee agroforestry. Agric. Ecosyst. Environ. 2014, 192, 19–37. [Google Scholar] [CrossRef]
- Tesemma, Z.K.; Wei, Y.P.; Western, A.W.; Peel, M.C. Leaf area index variation for crop, pasture, and tree in response to climatic variation in the goulburn-broken catchment, australia. J. Hydrometeorol. 2014, 15, 1592–1606. [Google Scholar] [CrossRef]
- Zhang, H.K.; Chen, J.M.; Huang, B.; Song, H.H.; Li, Y.R. Reconstructing seasonal variation of landsat vegetation index related to leaf area index by fusing with modis data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 950–960. [Google Scholar] [CrossRef]
- Leonenko, G.; Los, S.O.; North, P.R.J. Retrieval of leaf area index from modis surface reflectance by model inversion using different minimization criteria. Remote Sens. Environ. 2013, 139, 257–270. [Google Scholar] [CrossRef]
- Le Maire, G.; Marsden, C.; Nouvellon, Y.; Stape, J.L.; Ponzoni, F.J. Calibration of a species-specific spectral vegetation index for leaf area index (LAI) monitoring: Example with modis reflectance time-series on eucalyptus plantations. Remote Sens. 2012, 4, 3766–3780. [Google Scholar] [CrossRef] [Green Version]
- Luo, S.Z.; Wang, C.; Zhang, G.B.; Xi, X.H.; Li, G.C. Forest leaf area index (LAI) inversion using airborne lidar data. Chin. J. Geophys. Chin. Ed. 2013, 56, 1467–1475. [Google Scholar]
- Manninen, T.; Stenberg, P.; Rautiainen, M.; Voipio, P. Leaf area index estimation of boreal and subarctic forests using vv/hh envisat/asar data of various swaths. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3899–3909. [Google Scholar] [CrossRef]
- Liu, C.W.; Kang, S.Z.; Li, F.S.; Li, S.; Du, T.S. Canopy leaf area index for apple tree using hemispherical photography in arid region. Sci. Hortic. 2013, 164, 610–615. [Google Scholar] [CrossRef]
- Leblanc, S.G.; Fournier, R.A. Hemispherical photography simulations with an architectural model to assess retrieval of leaf area index. Agric. For. Meteorol. 2014, 194, 64–76. [Google Scholar] [CrossRef]
- Kumar, V.; Kumari, M.; Saha, S.K. Leaf area index estimation of lowland rice using semi-empirical backscattering model. J. Appl. Remote Sens. 2013, 7. [Google Scholar] [CrossRef]
- Gonsamo, A.; Chen, J.M. Continuous observation of leaf area index at fluxnet-canada sites. Agric. For. Meteorol. 2014, 189, 168–174. [Google Scholar] [CrossRef]
- Suits, G.H. The calculation of the directional reflectance of a vegetative canopy. Remote Sens. Environ. 1971, 2, 117–125. [Google Scholar] [CrossRef]
- Suits, G.H. The cause of azimuthal variations in directional reflectance of vegetative canopies. Remote Sens. Environ. 1971, 2, 175–182. [Google Scholar] [CrossRef]
- Verhoef, W. Light scattering by leaf layers with application to canopy reflectance modeling: The sail model. Remote Sens. Environ. 1984, 16, 125–141. [Google Scholar] [CrossRef]
- Reyna, E.; Badhwar, G.D. Inclusion of specular reflectance in vegetative canopy models. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 731–736. [Google Scholar] [CrossRef]
- Jackson, R.D.; Reginato, R.J.; Pinter, J.P.J.; Idso, S.B. Plant canopy information extraction from composite scene reflectance of row crops. Appl. Opt. 1979, 18, 3775–3782. [Google Scholar] [PubMed]
- Norman, J.M.; Welles, J.M.; Walter, E.A. Contrasts among bidirectional reflectance of leaves, canopies, and soils. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 659–667. [Google Scholar] [CrossRef]
- Ross, J. Radiative transfer in plant communities. Veg. Atmos. 1975, 1, 13–55. [Google Scholar]
- Li, X.; Strahler, A.H. Geometric-optical bidirectional reflectance modeling of a conifer forest canopy. IEEE Trans. Geosci. Remote Sens. 1986, GE-24, 906–919. [Google Scholar] [CrossRef]
- Li, X.; Strahler, A.H. Geometric-optical modeling of a conifer forest canopy. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 705–721. [Google Scholar] [CrossRef]
- Schaaf, C.B.; Li, X.; Strahler, A.H. Topographic effects on bidirectional and hemispherical reflectances calculated with a geometric-optical canopy model. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1186–1193. [Google Scholar] [CrossRef]
- Qi, J.; Kerr, Y.H.; Moran, M.S.; Weltz, M.; Huete, A.R.; Sorooshian, S.; Bryant, R. Leaf area index estimates using remotely sensed data and brdf models in a semiarid region. Remote Sens. Environ. 2000, 73, 18–30. [Google Scholar] [CrossRef]
- Li, X.; Strahler, A.H. Geometric-optical bidirectional reflectance modeling of the discrete crown vegetation canopy: Effect of crown shape and mutual shadowing. IEEE Trans. Geosci. Remote Sens. 1992, 30, 276–292. [Google Scholar] [CrossRef]
- Strahler, A.H.; Jupp, D.L.B. Modeling bidirectional reflectance of forests and woodlands using boolean models and geometric optics. Remote Sens. Environ 1990, 34, 153–166. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Strahler, A.H. A hybrid geometric optical-radiative transfer approach for modeling light absorption and albedo of discontinuous canopies. Sci. China (series B) 1994, 24, 828–836. [Google Scholar]
- Li, X.; Strahler, A.H.; Woodcock, C.E. A hybrid geometric optical-radiative transfer approach for modeling albedo and directional reflectance of discontinuous canopies. IEEE Trans. Geosci. Remote Sens. 1995, 33, 466–480. [Google Scholar]
- Li, X.; Strahler, A.H.; Friedl, M.A. A conceptual model for effective directional emissivity from nonisothermal surfaces. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2508–2517. [Google Scholar]
- Ma, H.; Song, J.; Wang, J.; Xiao, Z.; Fu, Z. Improvement of spatially continuous forest LAI retrieval by integration of discrete airborne lidar and remote sensing multi-angle optical data. Agric. For. Meteorol. 2014, 189, 60–70. [Google Scholar] [CrossRef]
- Fu, Z.; Wang, J.; Song, J.L.; Zhou, H.M.; Pang, Y.; Chen, B.S. Estimation of forest canopy leaf area index using MODIS, MISR, and LiDAR observations. J. Appl. Remote Sens. 2011, 5. [Google Scholar] [CrossRef]
- Li, Z.; Xu, Z. Detection of change points in temperature and precipitation time series in the heihe river basin over the past 50 years. Resour. Sci. 2011, 33, 1877–1882. [Google Scholar]
- Li, X.; Cheng, G.; Liu, S.; Xiao, Q.; Ma, M.; Jin, R.; Che, T.; Liu, Q.; Wang, W.; Qi, Y. Heihe watershed allied telemetry experimental research (hiwater) scientific objectives and experimental design (ei). Bull. Am. Meteorol. Soc. 2013, 94, 1145–1160. [Google Scholar] [CrossRef]
- Chen, J.M.; Cihlar, J. Plant canopy gap-size analysis theory for improving optical measurements of leaf-area index. Appl. Opt. 1995, 34, 6211–6222. [Google Scholar] [CrossRef] [PubMed]
- Gower, S.T.; Kucharik, C.J.; Norman, J.M. Direct and indirect estimation of leaf area index, f apar, and net primary production of terrestrial ecosystems. Remote Sens. Environ. 1999, 70, 29–51. [Google Scholar] [CrossRef]
- Chen, J.M. Optically-based methods for measuring seasonal variation of leaf area index in boreal conifer stands. Agric. For. Meteorol. 1996, 80, 135–163. [Google Scholar] [CrossRef]
- Zhang, X.; Ma, C.; Hu, H.; Li, F. Radiometric correction based on multi-temporal spot satellite images. In Proceedings of the International Conference on Wireless Communications & Signal Processing, 2009. WCSP 2009, Nanjing, China, 13–15 November 2009; pp. 1–6.
- Chopping, M.; Moisen, G.G.; Su, L.; Laliberte, A.; Rango, A.; Martonchik, J.V.; Peters, D.P.C. Large area mapping of southwestern forest crown cover, canopy height, and biomass using the nasa multiangle imaging spectro-radiometer. Remote Sens. Environ. 2008, 112, 2051–2063. [Google Scholar] [CrossRef]
- Li, X.; Strahler, A.H. Modeling the gap probability of a discontinuous vegetation canopy. IEEE Trans. Geosci. Remote Sens. 1988, 26, 161–170. [Google Scholar] [CrossRef]
- Zhu, Q.J.; Fan, S.H.; Liu, L.F.; Li, X.; Liu, Y. A model of the forest gap probability and its validation. Remote Sens. Environ. China. 1995, 10, 70–75. [Google Scholar]
- Nilson, T. A theoretical analysis of the frequency of gaps in plant stands. Agric. Meteorol. 1971, 8, 25–38. [Google Scholar] [CrossRef]
- Wilson, J.W. Stand structure and light penetration. I. Analysis by point quadrats. J. Appl. Ecol. 1965. [Google Scholar] [CrossRef]
- Miller, J. A formula for average foliage density. Aust. J. Bot. 1967, 15, 141–144. [Google Scholar] [CrossRef]
- Li, X.; Gao, F.; Wang, J.; Zhu, Q. Uncertainty and sensitivity matrix of parameters in inversion of physical brdf model. J. Remote Sens. 1997, 1, 5–14. [Google Scholar]
- Tarantola, A. Inverse Problem Theory and Methods for Model Parameter Estimation; SIAM (Society for Industrial and Applied Mathematics): Philadelphia, PA, USA, 2005. [Google Scholar]
- Boggs, P.T.; Tolle, J.W. Sequential quadratic programming. Acta Numer. 1995, 4, 1–51. [Google Scholar] [CrossRef]
- Björkman, G. Sequential quadratic programming for non-linear elastic contact problems. Int. J. Numer. Methods Eng. 1995, 38, 137–165. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Song, J.; Wang, J. Modifying Geometric-Optical Bidirectional Reflectance Model for Direct Inversion of Forest Canopy Leaf Area Index. Remote Sens. 2015, 7, 11083-11104. https://doi.org/10.3390/rs70911083
Li C, Song J, Wang J. Modifying Geometric-Optical Bidirectional Reflectance Model for Direct Inversion of Forest Canopy Leaf Area Index. Remote Sensing. 2015; 7(9):11083-11104. https://doi.org/10.3390/rs70911083
Chicago/Turabian StyleLi, Congrong, Jinling Song, and Jindi Wang. 2015. "Modifying Geometric-Optical Bidirectional Reflectance Model for Direct Inversion of Forest Canopy Leaf Area Index" Remote Sensing 7, no. 9: 11083-11104. https://doi.org/10.3390/rs70911083