
Superpixel-Based Roughness Measure for Multispectral Satellite Image Segmentation

 , , and
, , and 
Abstract
:
1. Introduction
2. Background
2.1. Rough-Set Preliminaries
2.2. Histon
2.3. Roughness Index
2.4. Superpixel Segmentation and SLIC
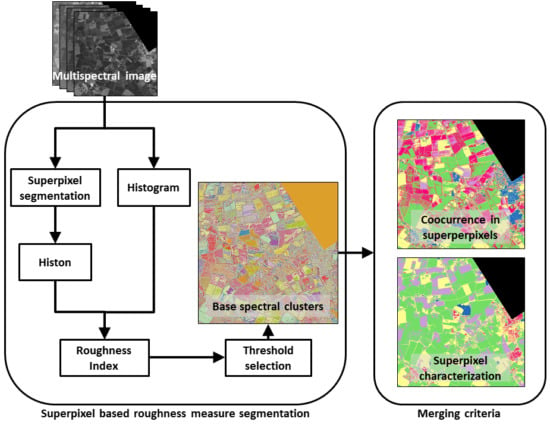
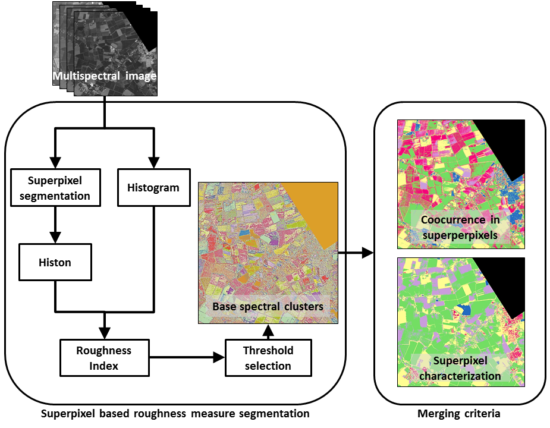
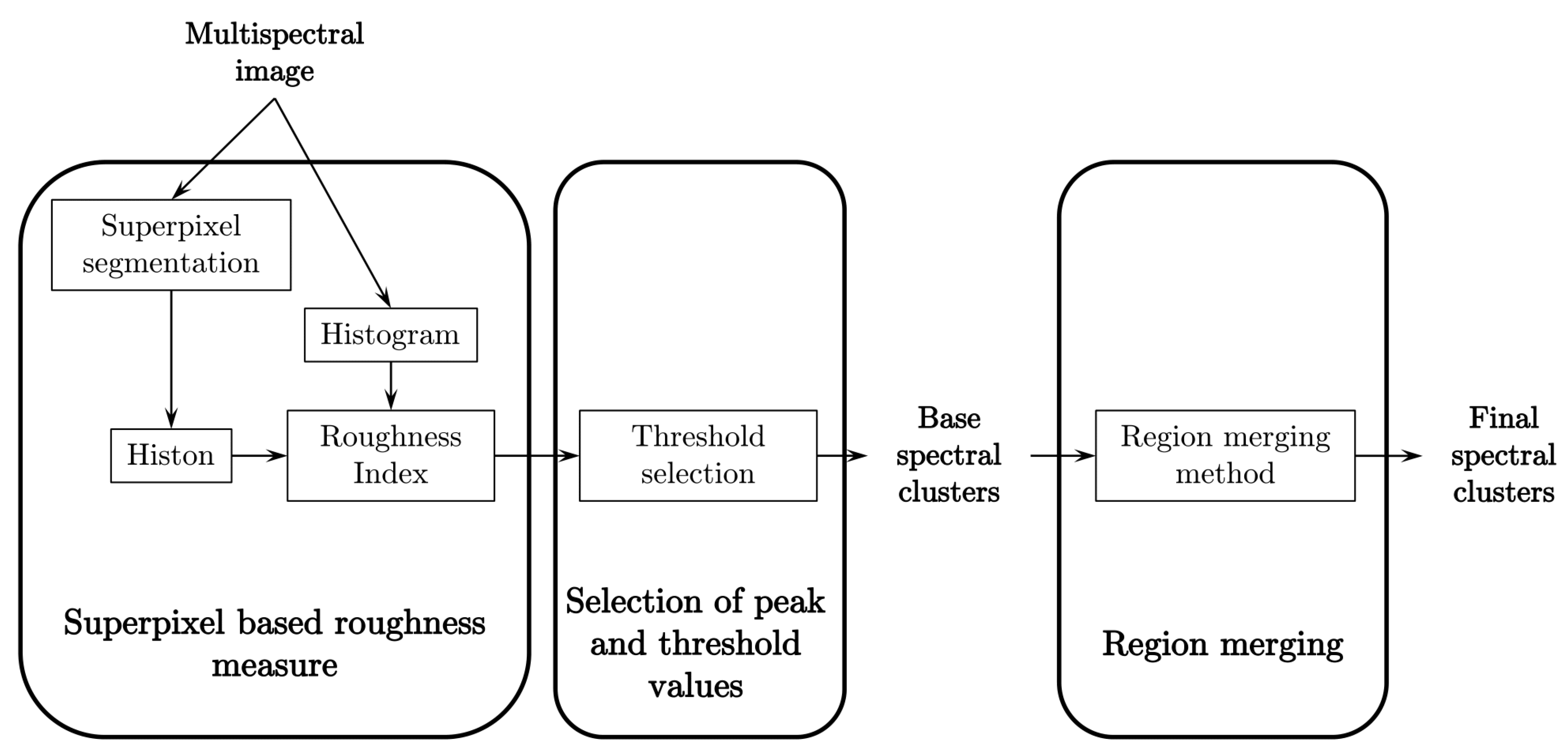
3. Methodology
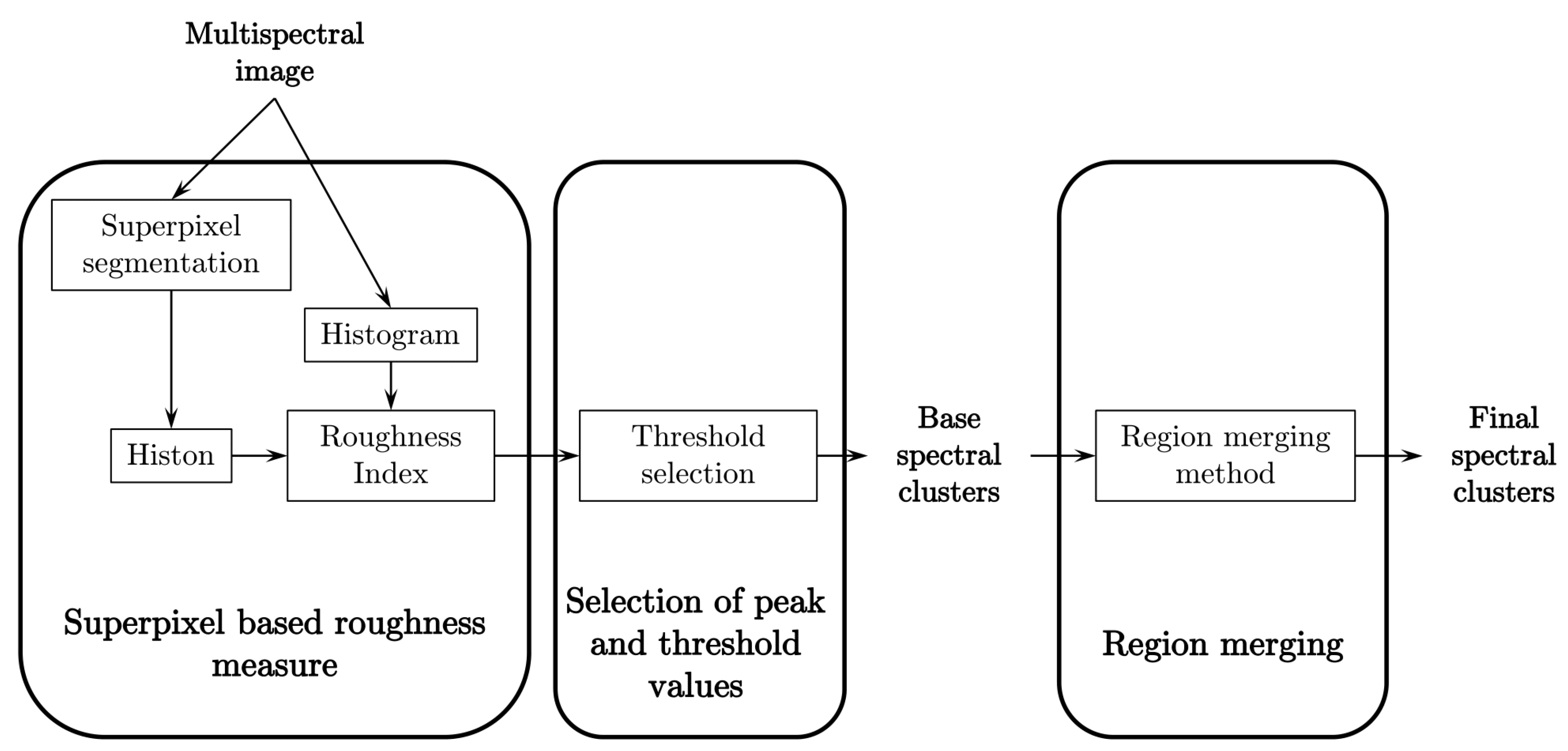
3.1. Superpixel-Based Roughness Measure in Multispectral Satellite Images
3.2. Region Merging
3.2.1. Co-Occurrence in Superperpixels
3.2.2. Superpixel Characterization
4. Study Area and Dataset
5. Results and Discussion
5.1. Superpixel-Based Roughness Segmentation Evaluation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Method | Number of Clusters | Image | Method | Number of Clusters | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Blue | Green | Red | Infra | Final | Blue | Green | Red | Infra | Final | ||||
| CHILE2 | Histogram | 3 | 4 | 5 | 9 | 63 | CHILE1 | Histogram | 4 | 6 | 7 | 6 | 80 |
| Roughness index | 25 | 20 | 26 | 16 | 141 | Roughness index | 10 | 9 | 11 | 13 | 121 | ||
| Superpixel roughness index | 17 | 21 | 22 | 16 | 171 | Superpixel roughness index | 10 | 11 | 12 | 13 | 125 | ||
| MARYLAND | Histogram | 8 | 10 | 11 | 11 | 178 | ARGENTINA | Histogram | 1 | 5 | 5 | 9 | 76 |
| Roughness index | 13 | 13 | 14 | 9 | 88 | Roughness index | 10 | 12 | 13 | 16 | 174 | ||
| Superpixel roughness index | 18 | 19 | 23 | 14 | 177 | Superpixel roughness index | 11 | 12 | 16 | 11 | 176 | ||
| CANADA2 | Histogram | 2 | 1 | 2 | 2 | 9 | CANADA1 | Histogram | 2 | 1 | 2 | 2 | 7 |
| Roughness index | 4 | 5 | 4 | 4 | 38 | Roughness index | 11 | 11 | 9 | 6 | 121 | ||
| Superpixel roughness index | 12 | 13 | 14 | 18 | 188 | Superpixel roughness index | 10 | 12 | 9 | 8 | 110 | ||
| Intra-Region Uniformity | Inter-Region Variability | Aggregate Value | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Roughness Index | Superpixel-Based Roughness | Roughness Index | Superpixel-Based Roughness | Roughness Index | Superpixel-Based Roughness | ||||||||||||||
| Image | N.Clusters | C. Dist | Coo. Sup. | Sup. Ch. | C. Dist | Coo. Sup. | Sup. Ch. | C. Dist | Coo. Sup. | Sup. Ch. | C. Dist | Coo. Sup. | Sup. Ch. | C. Dist | Coo. Sup. | Sup. Ch. | C. Dist | Coo. Sup. | Sup. Ch. |
| CANADA1 | 5 | 0.7343 | 0.6650 | 0.7011 | 0.7809 | 0.7332 | 0.7300 | 0.2137 | 0.1307 | 0.2020 | 0.2490 | 0.2080 | 0.2151 | 0.4740 | 0.3978 | 0.4515 | 0.5150 | 0.4706 | 0.4725 |
| 10 | 0.6025 | 0.6648 | 0.6144 | 0.6852 | 0.7013 | 0.6484 | 0.1787 | 0.1715 | 0.1752 | 0.1726 | 0.1755 | 0.1785 | 0.3906 | 0.4182 | 0.3948 | 0.4289 | 0.4384 | 0.4134 | |
| 15 | 0.6274 | 0.6432 | 0.5228 | 0.6495 | 0.6357 | 0.5457 | 0.1712 | 0.1624 | 0.1753 | 0.1716 | 0.1654 | 0.1779 | 0.3993 | 0.4028 | 0.3491 | 0.4105 | 0.4005 | 0.3618 | |
| CANADA2 | 5 | 0.8764 | 0.7670 | 0.8594 | 0.8306 | 0.8564 | 0.8310 | 0.1640 | 0.1711 | 0.2844 | 0.1761 | 0.1636 | 0.1897 | 0.5202 | 0.4690 | 0.5719 | 0.5034 | 0.5100 | 0.5103 |
| 10 | 0.7678 | 0.6676 | 0.7081 | 0.8307 | 0.8158 | 0.7611 | 0.1877 | 0.1780 | 0.1745 | 0.1753 | 0.1703 | 0.1739 | 0.4777 | 0.4228 | 0.4413 | 0.5030 | 0.4931 | 0.4675 | |
| 15 | 0.6960 | 0.6725 | 0.6562 | 0.8132 | 0.8001 | 0.7003 | 0.1741 | 0.1739 | 0.1749 | 0.1749 | 0.1765 | 0.1764 | 0.4350 | 0.4232 | 0.4156 | 0.4940 | 0.4882 | 0.4383 | |
| ARGENTINA | 5 | 0.7871 | 0.7939 | 0.7045 | 0.7795 | 0.7291 | 0.6945 | 0.1770 | 0.1791 | 0.1819 | 0.2142 | 0.1685 | 0.1668 | 0.4821 | 0.4865 | 0.4432 | 0.4969 | 0.4488 | 0.4306 |
| 10 | 0.7288 | 0.6973 | 0.6152 | 0.6975 | 0.6278 | 0.5389 | 0.1656 | 0.1770 | 0.1722 | 0.1742 | 0.1724 | 0.1633 | 0.4472 | 0.4372 | 0.3937 | 0.4359 | 0.4001 | 0.3511 | |
| 15 | 0.6563 | 0.6649 | 0.4498 | 0.6423 | 0.6105 | 0.4154 | 0.1698 | 0.1687 | 0.1705 | 0.1696 | 0.1693 | 0.1618 | 0.4130 | 0.4168 | 0.3102 | 0.4060 | 0.3899 | 0.2886 | |
| MARYLAND | 5 | 0.8541 | 0.8943 | 0.8567 | 0.8632 | 0.9003 | 0.8495 | 0.4556 | 0.4391 | 0.4158 | 0.3856 | 0.4739 | 0.4801 | 0.6548 | 0.6667 | 0.6362 | 0.6244 | 0.6871 | 0.6648 |
| 10 | 0.8015 | 0.8094 | 0.6350 | 0.8323 | 0.8881 | 0.7592 | 0.4428 | 0.4377 | 0.4123 | 0.4193 | 0.4632 | 0.4688 | 0.6221 | 0.6235 | 0.5237 | 0.6258 | 0.6757 | 0.6140 | |
| 15 | 0.7504 | 0.7314 | 0.5337 | 0.8213 | 0.8896 | 0.7189 | 0.4337 | 0.4388 | 0.4120 | 0.4171 | 0.4571 | 0.4582 | 0.5921 | 0.5851 | 0.4729 | 0.6192 | 0.6734 | 0.5886 | |
| CHILE1 | 5 | 0.8233 | 0.8817 | 0.8471 | 0.8187 | 0.8851 | 0.8312 | 0.3124 | 0.2959 | 0.2943 | 0.2986 | 0.2825 | 0.2973 | 0.5679 | 0.5888 | 0.5707 | 0.5586 | 0.5838 | 0.5642 |
| 10 | 0.8088 | 0.8408 | 0.8328 | 0.8013 | 0.8744 | 0.8074 | 0.2897 | 0.2895 | 0.2909 | 0.3031 | 0.2894 | 0.2923 | 0.5492 | 0.5651 | 0.5618 | 0.5522 | 0.5819 | 0.5498 | |
| 15 | 0.7984 | 0.8276 | 0.7331 | 0.8020 | 0.8378 | 0.7808 | 0.2869 | 0.2856 | 0.2895 | 0.2886 | 0.2851 | 0.2885 | 0.5427 | 0.5566 | 0.5113 | 0.5453 | 0.5614 | 0.5347 | |
| CHILE2 | 5 | 0.7568 | 0.8594 | 0.8967 | 0.7515 | 0.8239 | 0.9053 | 0.2310 | 0.2002 | 0.2302 | 0.2363 | 0.2048 | 0.1969 | 0.4939 | 0.5298 | 0.5635 | 0.4939 | 0.5143 | 0.5511 |
| 10 | 0.7463 | 0.8547 | 0.8009 | 0.7439 | 0.8125 | 0.8989 | 0.2044 | 0.1931 | 0.2031 | 0.1977 | 0.1972 | 0.2004 | 0.4753 | 0.5239 | 0.5020 | 0.4708 | 0.5048 | 0.5496 | |
| 15 | 0.7449 | 0.7664 | 0.7859 | 0.7310 | 0.8041 | 0.8068 | 0.2017 | 0.1897 | 0.2033 | 0.1972 | 0.1929 | 0.1958 | 0.4733 | 0.4781 | 0.4946 | 0.4641 | 0.4985 | 0.5013 | |
5.2. Merging Strategies’ Evaluation


6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Friedman, N.; Russell, S. Image segmentation in video sequences: A probabilistic approach. In Proceedings of the Thirteenth Conference on Uncertainty in Artificial Intelligence, Providence, RI, USA, 1–3 August 1997.
- Fröhlich, B.; Bach, E.; Walde, I.; Hese, S.; Schmullius, C.; Denzler, J. Land cover classification of satellite images using contextual information. ISPRS Ann. Photogramm., Remote Sens. Spat. Inf. Sci. 2013, II-3/W1, 1–6. [Google Scholar] [CrossRef]
- Pal, N.R.; Pal, S.K. A review on image segmentation techniques. Pattern Recognit. 1993, 26, 1277–1294. [Google Scholar] [CrossRef]
- Lambert, P.; Macaire, L. Filtering and segmentation: The specificity of color images. In Proceedings of the First International Conference on Color in Graphics and Image Processing (CGIP), Saint-Etienne, France, 1–4 October 2000.
- Banerjee, B.; Surender, V.; Buddhiraju, K. Satellite image segmentation: A novel adaptive mean-shift clustering based approach. In Proceedings of 2012 IEEE International Conference on Geoscience and Remote Sensing Symposium (IGARSS), Munich, German, 22–27 July 2012.
- Zhang, H.; Fritts, J.E.; Goldman, S.A. Image segmentation evaluation: A survey of unsupervised methods. Comput. Vis. Image Underst. 2008, 110, 260–280. [Google Scholar] [CrossRef]
- Al-amri, S.S.; Kalyankar, N.V.; D., K.S. Image Segmentation by Using Threshold Techniques. Available online: http://arxiv.org/abs/1005.4020 (accessed on 16 April 2015).
- He, S.; Ni, J.; Wu, L.; Wei, H.; Zhao, S. Image threshold segmentation method with 2-D histogram based on multi-resolution analysis. In Proceedings of 4th International Conference on Computer Science & Education, Nanning, China, 25–28 July 2009.
- Koonsanit, K.; Jaruskulchai, C.; Eiumnoh, A. Parameter-free K-means clustering algorithm for satellite imagery application. In Proceedings of 2012 International Conference on Information Science and Applications, Suwon, South Korea, 23–25 May 2012.
- Yugander, P.; Sheshagiri, B.; Sunanda, K.; Susmitha, E. Multiple kernel fuzzy C-means algorithm with ALS method for satellite and medical image segmentation. In Proceedings of 2012 International Conference on Devices, Circuits and Systems, Coimbatore, India, 15–16 March 2012.
- Tran, T.; Wehrens, R.; Buydens, L. Knn density-based clustering for high dimensional multispectral images. In Proceedings of 2nd GRSS/ISPRS Joint Workshop on Remote Sensing and Data Fusion over Urban Areas, Berlin, Germany, 22–23 May 2003.
- Paclìk, P.; Duin, R.; van Kempen, G.; Kohlus, R. Segmentation of multi-spectral images using the combined classifier approach. Image Vis. Comput. 2003, 21, 473–482. [Google Scholar] [CrossRef]
- Haralick, R.; Dinstein, I. A spatial clustering procedure for multi-image data. IEEE Trans. Circ. Syst. 1975, 22, 440–450. [Google Scholar] [CrossRef]
- Matas, J.; Kittler, J. Spatial and feature space clustering: Applications in image analysis. In Computer Analysis of Images and Patterns; Springer: Berlin, German, 1995; pp. 162–173. [Google Scholar]
- Eklundh, J.O.; Yamamoto, H.; Rosenfeld, A. A relaxation method for multispectral pixel classification. IEEE Trans. Pattern Anal. Mach. Intell. 1980, 2, 72–75. [Google Scholar] [CrossRef] [PubMed]
- Hsiao, J.; Sawchuk, A. Supervised textured image segmentation using feature smoothing and probabilistic relaxation techniques. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 1279–1292. [Google Scholar] [CrossRef]
- Banerjee, B.; Varma, S.; Buddhiraju, K.; Eeti, L. Unsupervised multi-spectral satellite image segmentation combining modified mean-shift and a new minimum spanning tree based clustering technique. IEEE J. Sel. Top. Appl. Topics Earth Obs. Remote Sens. 2014, 7, 888–894. [Google Scholar] [CrossRef]
- Mohabey, A.; Ray, A. Rough set theory based segmentation of color images. In Proceedings of 19th International Conference on Fuzzy Information Processing Society of the North American, Atlanta, GA, USA, 13–15 July 2000.
- Mushrif, M.M.; Ray, A.K. Color image segmentation: Rough-set theoretic approach. Pattern Recogn. Lett. 2008, 29, 483–493. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough sets. Int. J. Comput. Inf. Sci. 1982, 11, 341–356. [Google Scholar] [CrossRef]
- Pawlak, Z. Rough Sets: Theoretical Aspects of Reasoning About Data; Kluwer Academic Publishers: Norwell, MA, USA, 1992. [Google Scholar]
- Pawlak, Z.; Grzymala-Busse, J.; Slowinski, R.; Ziarko, W. Rough sets. Commun. ACM 1995, 38, 88–95. [Google Scholar] [CrossRef]
- Düntsch, I.; Gediga, G. Statistical evaluation of rough set dependency analysis. Int. J. Hum.-Comput. Stud. 1997, 46, 589–604. [Google Scholar] [CrossRef]
- Ren, X.; Malik, J. Learning a classification model for segmentation. In Proceedings of Ninth IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003.
- Li, Y.; Sun, J.; Tang, C.K.; Shum, H.Y. Lazy snapping. ACM Trans. Graph. 2004, 23, 303–308. [Google Scholar] [CrossRef]
- He, X.; Zemel, R.; Ray, D. Learning and incorporating top-down cues in image segmentation. In Computer Vision—ECCV 2006; Leonardis, A., Bischof, H., Pinz, A., Eds.; Springer: Berlin, German, 2006; pp. 338–351. [Google Scholar]
- Levinshtein, A.; Dickinson, S.; Sminchisescu, C. Multiscale symmetric part detection and grouping. In Proceedings of IEEE 12th International Conference on Computer Vision, Kyoto, Japan, 29 September–2 October 2009.
- Liu, M.; Salzmann, M.; He, X. Discrete-continuous depth estimation from a single image. In Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014.
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; SÃijsstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef] [PubMed]
- Yue, X.D.; Miao, D.Q.; Zhang, N.; Cao, L.B.; Wu, Q. Multiscale roughness measure for color image segmentation. Inf. Sci. 2012, 216, 93–112. [Google Scholar] [CrossRef]
- Cheng, H.D.; Jiang, X.H.; Wang, J. Color image segmentation based on homogram thresholding and region merging. Pattern Recogn. 2002, 35, 373–393. [Google Scholar] [CrossRef]
- Vergés-Llahí, J.; Sanfeliu, A. Evaluation of distances between color image segmentations. In Pattern Recognition and Image Analysis; Marques, J., Pérez de la Blanca, N., Pina, P., Eds.; Springer: Berlin, German, 2005; pp. 263–270. [Google Scholar]
- Legendre, P.; Legendre, L. Numerical Ecology; Elsevier Science: Amsterdam, Netherlands, 1998. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Garcia-Pedrero, A.; Gonzalo-Martín, C.; Fonseca-Luengo, D.; Lillo-Saavedra, M. A GEOBIA methodology for fragmented agricultural landscapes. Remote Sens. 2015, 7, 767. [Google Scholar] [CrossRef]
- Haralick, R.; Shanmugam, K.; Dinstein, I. Textural features for image classification. IEEE Trans. Syst. Man Cy. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]
- Levine, M.; Nazif, A.M. Dynamic measurement of computer generated image segmentations. IEEE Trans. Pattern Ana. Mach. Intell. 1985, PAMI-7, 155–164. [Google Scholar] [CrossRef]
- Harrower, M.; Brewer, C.A. ColorBrewer.org: An online tool for selecting color schemes for maps. Cartogr. J. 2003, 40, 27–37. [Google Scholar] [CrossRef]
- Fonseca-Luengo, D.; García-Pedrero, A.; Lillo-Saavedra, M.; Costumero, R.; Menasalvas, E.; Gonzalo-Martín, C. Optimal scale in a hierarchical segmentation method for satellite images. In Rough Sets and Intelligent Systems Paradigms; Kryszkiewicz, M., Cornelis, C., Ciucci, D., Medina-Moreno, J., Motoda, H., Raś, Z., Eds.; Springer: Berlin, German, 2014; pp. 351–358. [Google Scholar]
- Mushrif, M.; Ray, A. A-IFS histon based multi-thresholding algorithm for color image segmentation. IEEE Signal Proc. Lett. 2009, 16, 168–171. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortiz Toro, C.A.; Gonzalo Martín, C.; García Pedrero, Á.; Menasalvas Ruiz, E. Superpixel-Based Roughness Measure for Multispectral Satellite Image Segmentation. Remote Sens. 2015, 7, 14620-14645. https://doi.org/10.3390/rs71114620
Ortiz Toro CA, Gonzalo Martín C, García Pedrero Á, Menasalvas Ruiz E. Superpixel-Based Roughness Measure for Multispectral Satellite Image Segmentation. Remote Sensing. 2015; 7(11):14620-14645. https://doi.org/10.3390/rs71114620
Chicago/Turabian StyleOrtiz Toro, César Antonio, Consuelo Gonzalo Martín, Ángel García Pedrero, and Ernestina Menasalvas Ruiz. 2015. "Superpixel-Based Roughness Measure for Multispectral Satellite Image Segmentation" Remote Sensing 7, no. 11: 14620-14645. https://doi.org/10.3390/rs71114620