
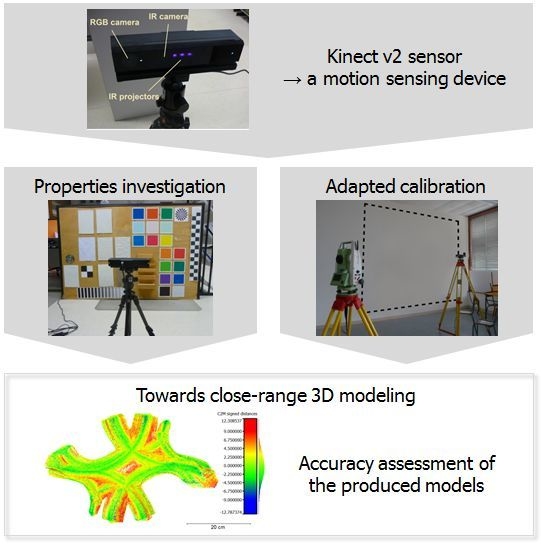
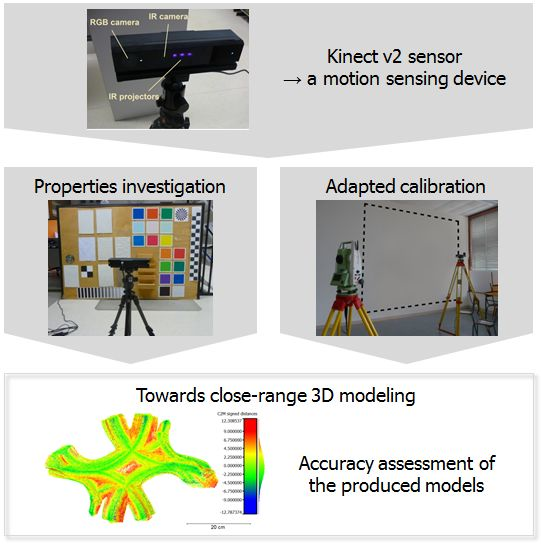
Assessment and Calibration of a RGB-D Camera (Kinect v2 Sensor) Towards a Potential Use for Close-Range 3D Modeling





Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Share and Cite
Lachat, E.; Macher, H.; Landes, T.; Grussenmeyer, P. Assessment and Calibration of a RGB-D Camera (Kinect v2 Sensor) Towards a Potential Use for Close-Range 3D Modeling. Remote Sens. 2015, 7, 13070-13097. https://doi.org/10.3390/rs71013070
Lachat E, Macher H, Landes T, Grussenmeyer P. Assessment and Calibration of a RGB-D Camera (Kinect v2 Sensor) Towards a Potential Use for Close-Range 3D Modeling. Remote Sensing. 2015; 7(10):13070-13097. https://doi.org/10.3390/rs71013070
Chicago/Turabian StyleLachat, Elise, Hélène Macher, Tania Landes, and Pierre Grussenmeyer. 2015. "Assessment and Calibration of a RGB-D Camera (Kinect v2 Sensor) Towards a Potential Use for Close-Range 3D Modeling" Remote Sensing 7, no. 10: 13070-13097. https://doi.org/10.3390/rs71013070
APA StyleLachat, E., Macher, H., Landes, T., & Grussenmeyer, P. (2015). Assessment and Calibration of a RGB-D Camera (Kinect v2 Sensor) Towards a Potential Use for Close-Range 3D Modeling. Remote Sensing, 7(10), 13070-13097. https://doi.org/10.3390/rs71013070