Remote Estimation of Chlorophyll-a in Inland Waters by a NIR-Red-Based Algorithm: Validation in Asian Lakes


Abstract
:1. Introduction
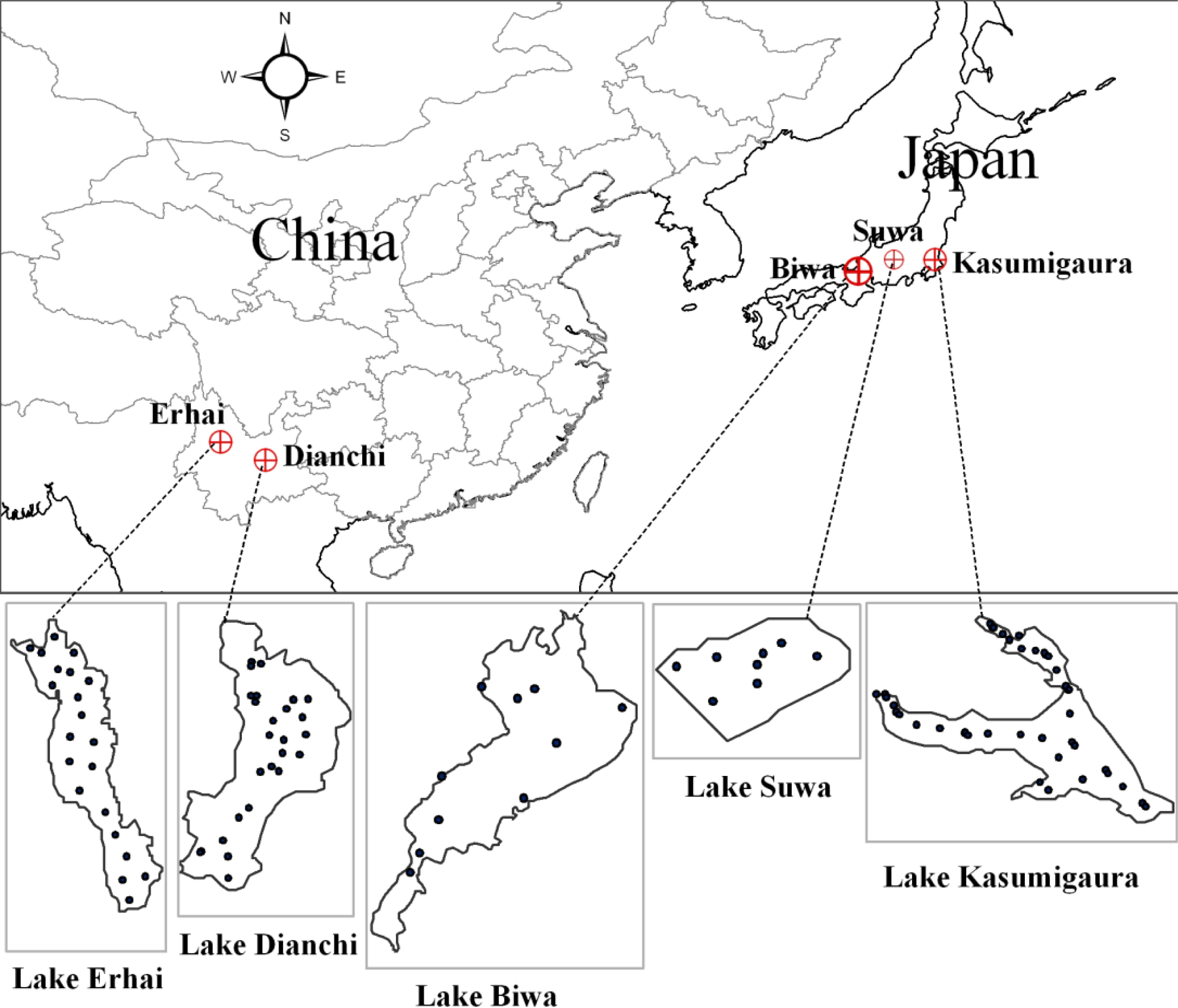
2. Study Areas
3. Materials and Methods
3.1. Data Collection
3.2. SAMO-LUT Method
- Step 1: Generation of simulation dataset. The Rrs spectra were generated based on the SIOPs from target water and a bio-optical model. In the present study, only the SIOPs collected from Lake Dianchi were used due to the lack of complete SIOPs data for other lakes. We felt it would be worthwhile to examine how the SIOPs affected the accuracy of the SAMO-LUT algorithm. The concentrations of Chl-a and NAP (i.e., tripton in the original paper), as well as the absorption coefficient of CDOM at 440 nm were varied in a wide range of 1–300 mg·m−3 (31 values), 1–250 g·m−3 (28 values) and 0.1–10 m−1 (23 values), respectively. In all, 19,964 sample spectra were generated [11].
- Step 2: Computation of selected semi-analytical indices. Three semi-analytical indices were selected for the estimation of Chl-a, NAP and CDOM, based on their reasonableness and performance. The selected indices were: a three-band index ([1/Rrs(665) − 1/Rrs(708)]*Rrs(753)) for Chl-a, remote-sensing reflectance for the band centered 753 nm, Rrs(753), for NAP, and the band-ratio Rrs(560)/Rrs(665) for CDOM ([2,24]). The synthetic reflectances were resampled to the bandwidths of the MERIS (Medium Resolution Imaging Spectrometer) sensor based on its spectral response function, and then calculated as the selected indices.
- Step 3: Construction of look-up tables. We constructed three 2-dimensional look-up tables containing the coefficients of the estimation model for one constituent of interest, determined by the concentrations of the other two constituents. For instance, for the estimation of Chl-a, increments of 1 mg·m−3 for NAP and of 0.1 m−1 for CDOM were respectively used in the ranges of 1–250 mg·m−3 and 0.1–10 m−1, and the regression coefficients corresponding to different combinations of NAP and CDOM were stored in the LUT.
- Step 4: Initial estimations of Chl-a and NAP. We derived initial values of Chl-a and NAP using two general estimation models obtained through regression analysis between the simulated reflectance and corresponding Chl-a and NAP. The two general estimation models were:The calculated initial Chl-a and NAP were then used to estimate initial CDOM through a prepared LUT in Step 3.
- Step 5: Iteration to select more appropriate model coefficients. The estimation models were improved according to the initial Chl-a, NAP, and CDOM. After that, the refined Chl-a, NAP, and CDOM were obtained by using the improved estimation models.
- Step 6: End of iteration. We found a more appropriate estimation model from the LUTs for each water constituent through the iterative use of the newly obtained Chl-a, NAP and CDOM. The iteration was stopped when the difference between the current and last output was sufficiently small. Generally, the differences become stable after the 10th iteration.
3.3. Conventional 3-Band Index-Based Estimation Model
3.4. Accuracy Assessment
4. Results
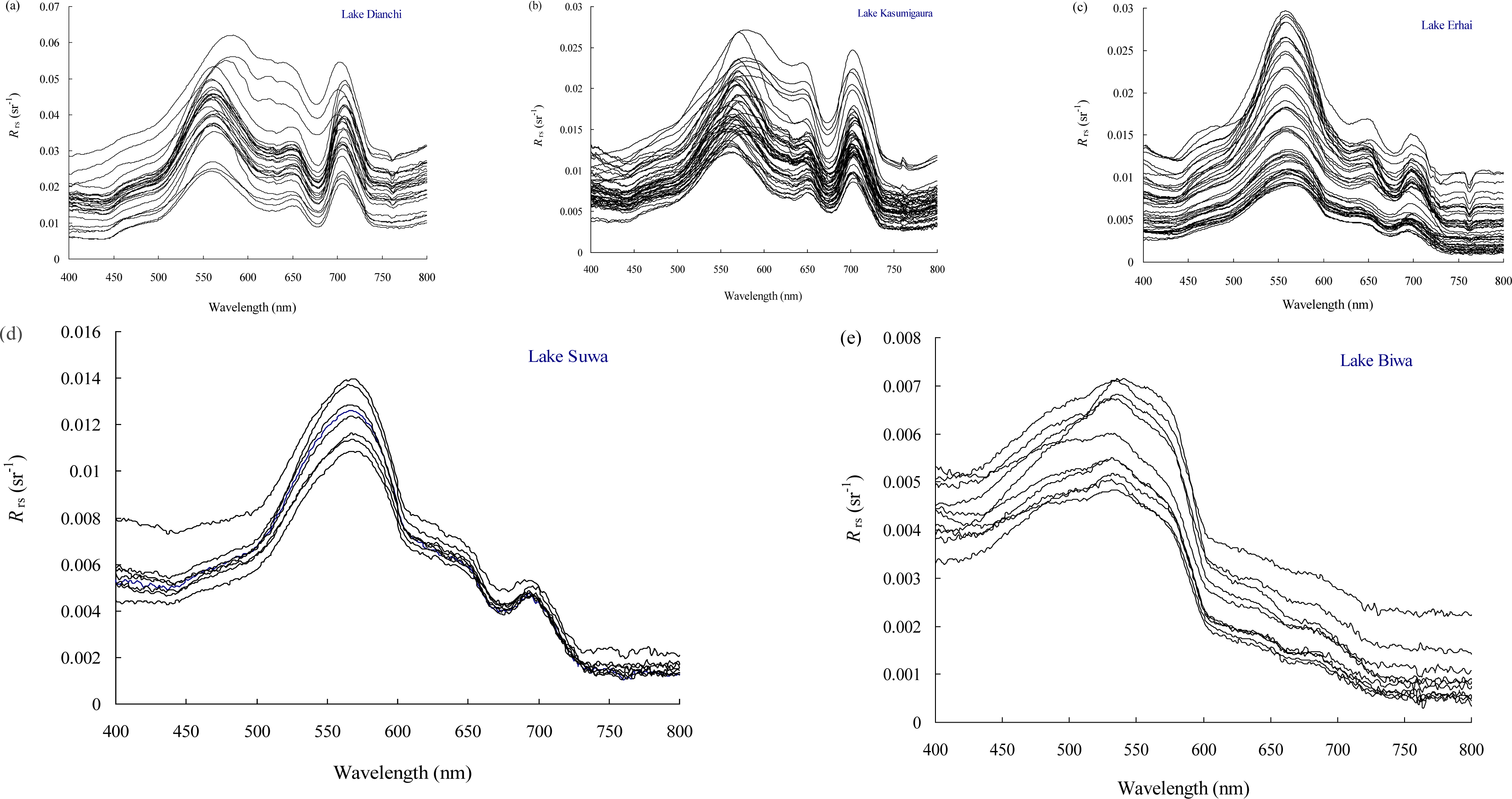
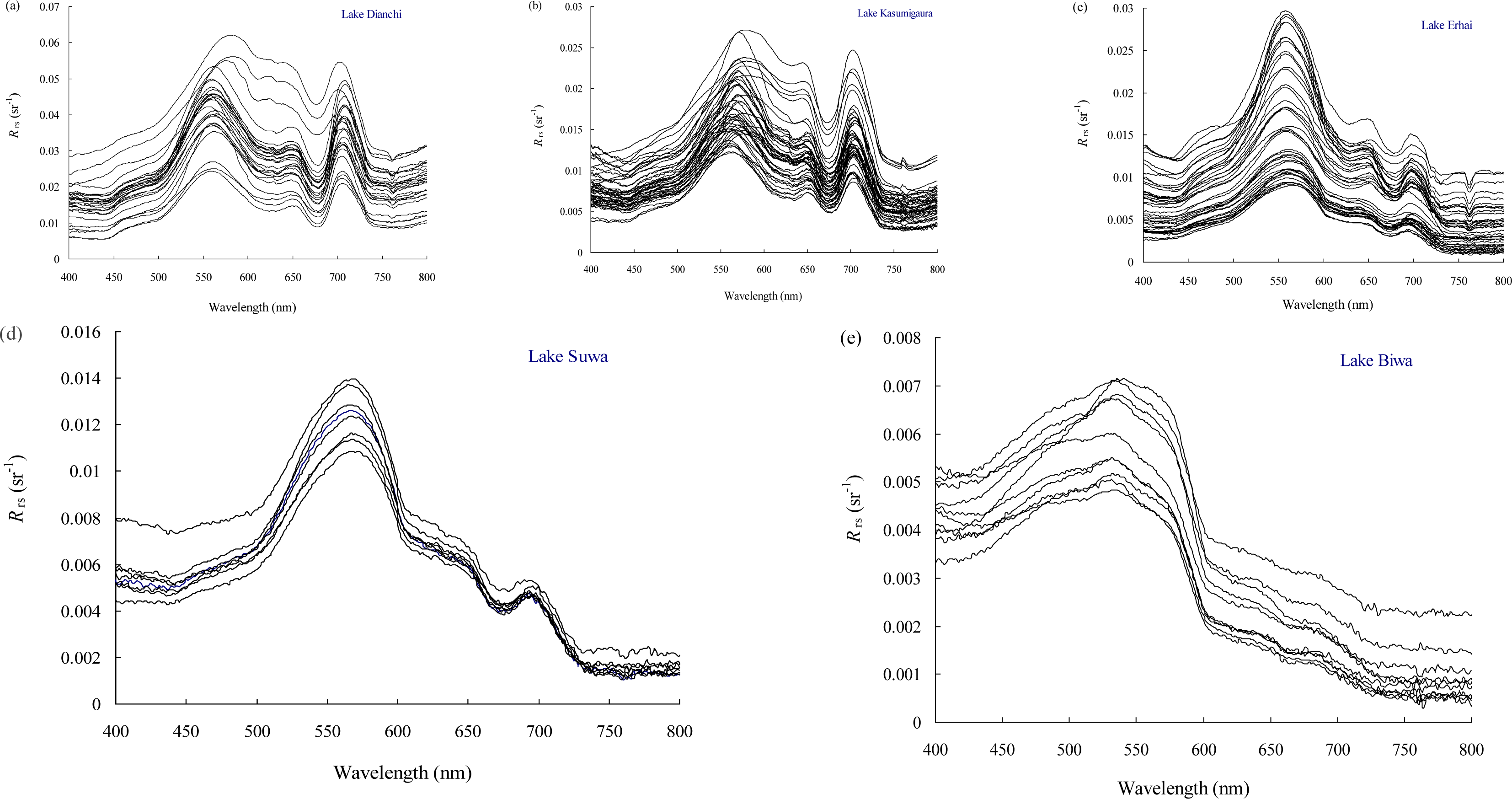
4.1. Water Constituent Concentrations and Spectral Reflectance Properties
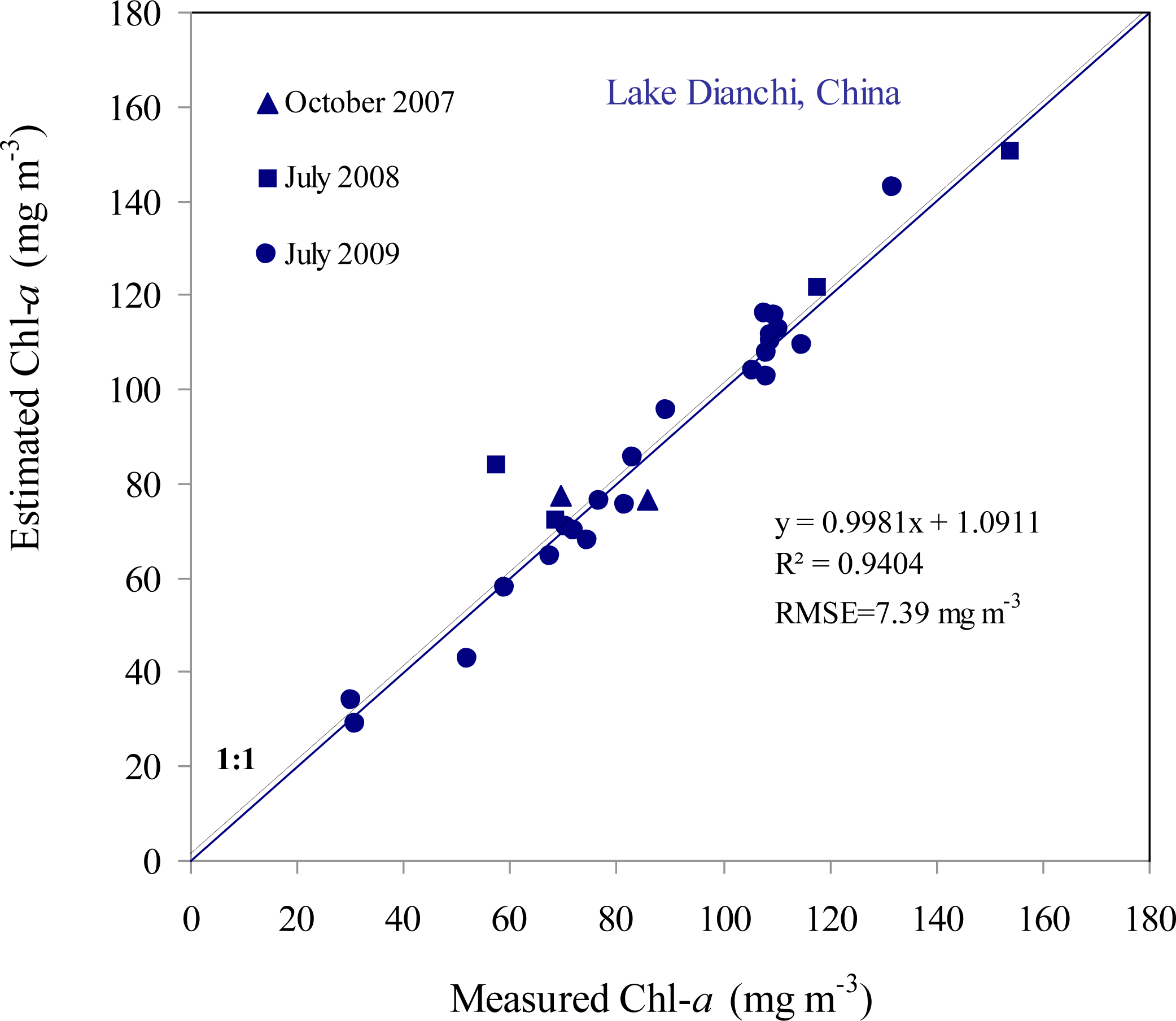
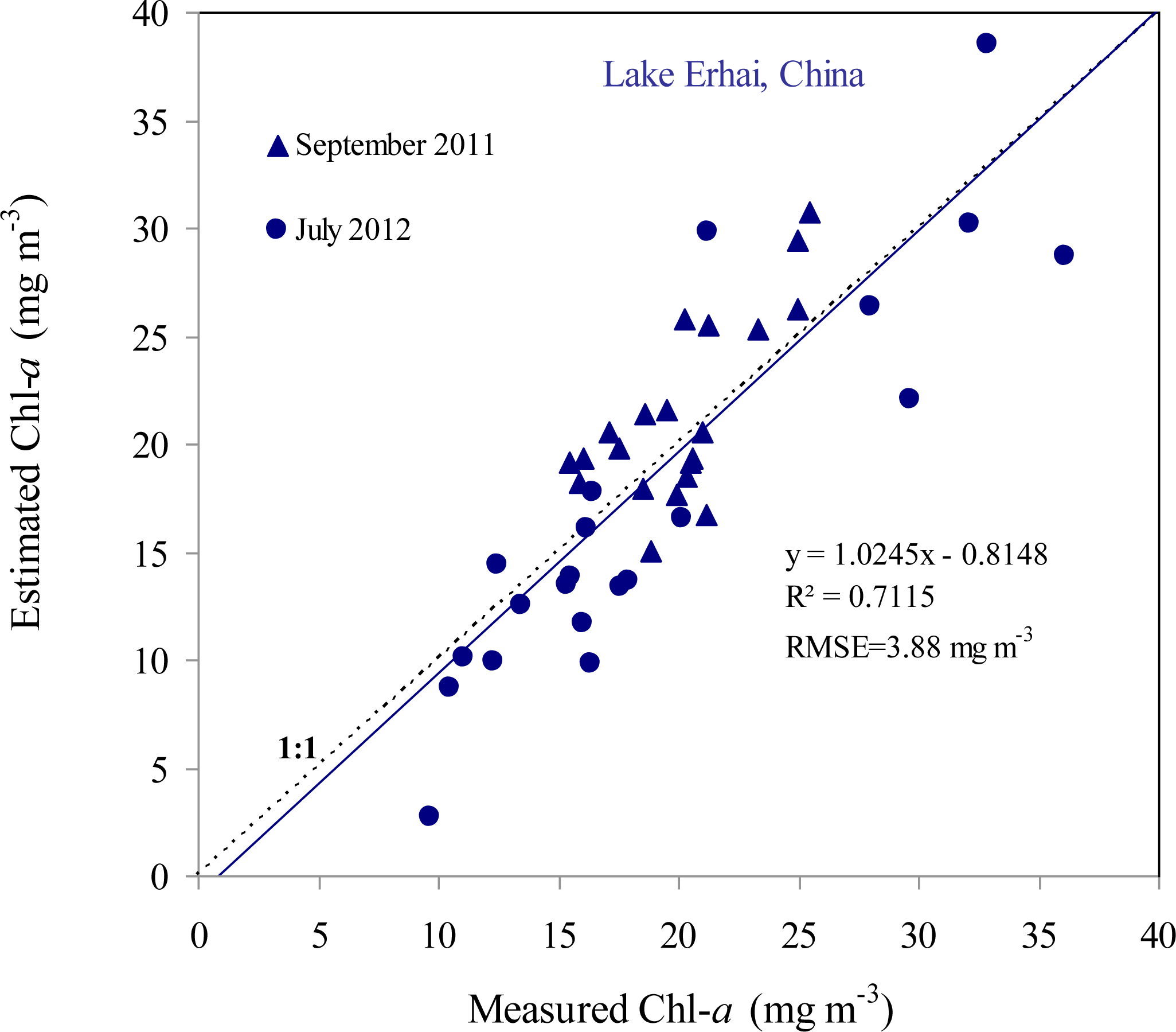
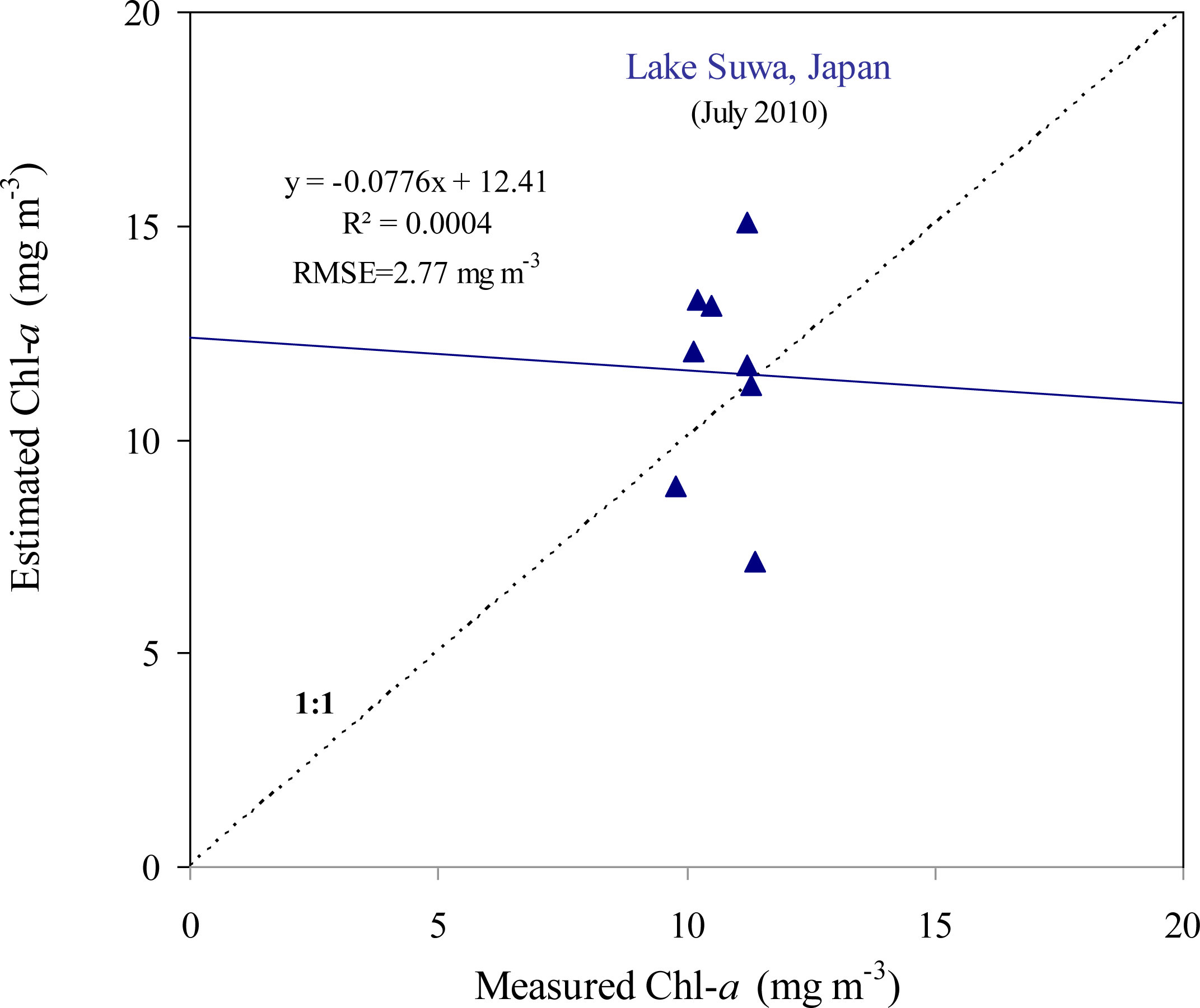
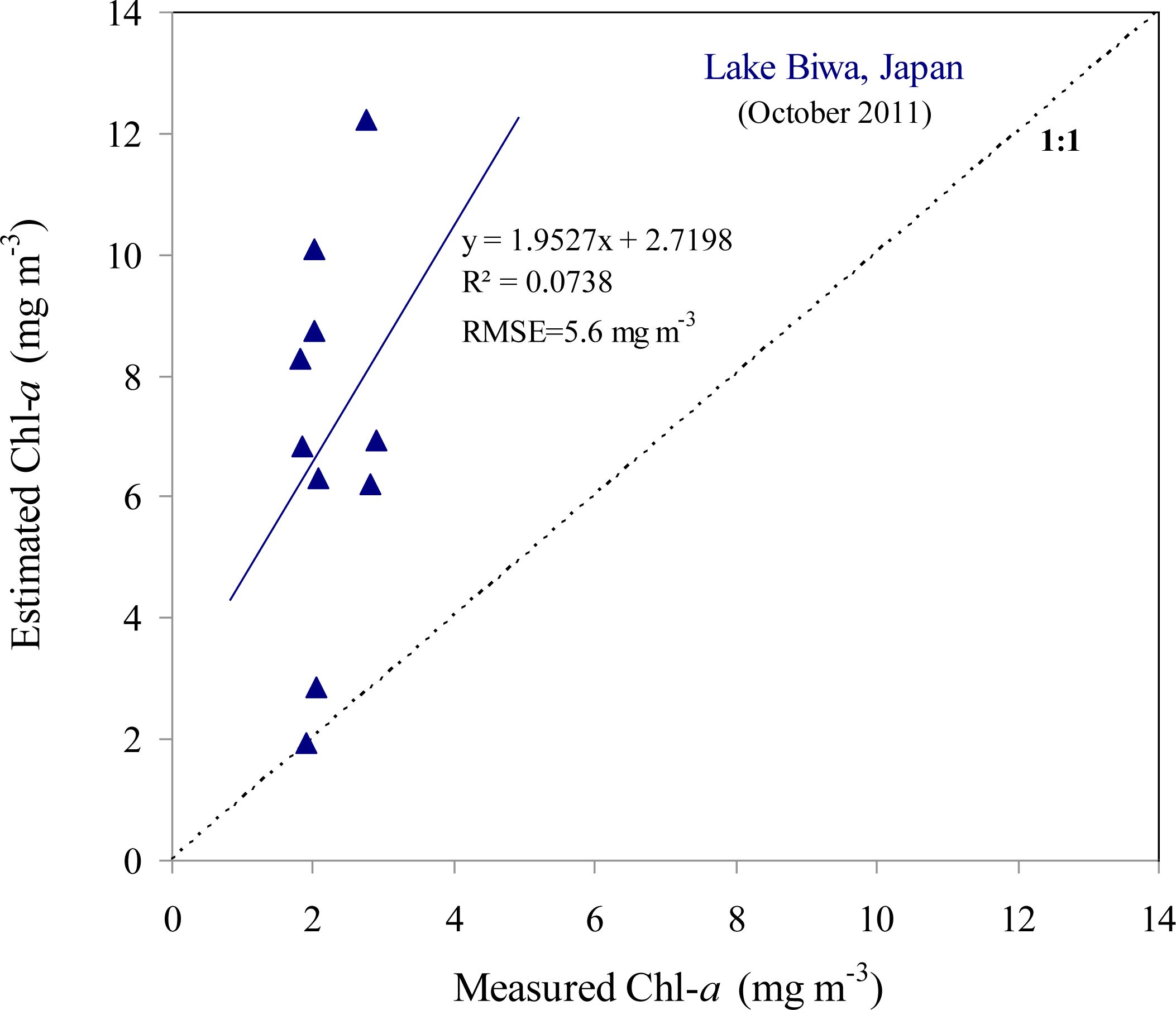
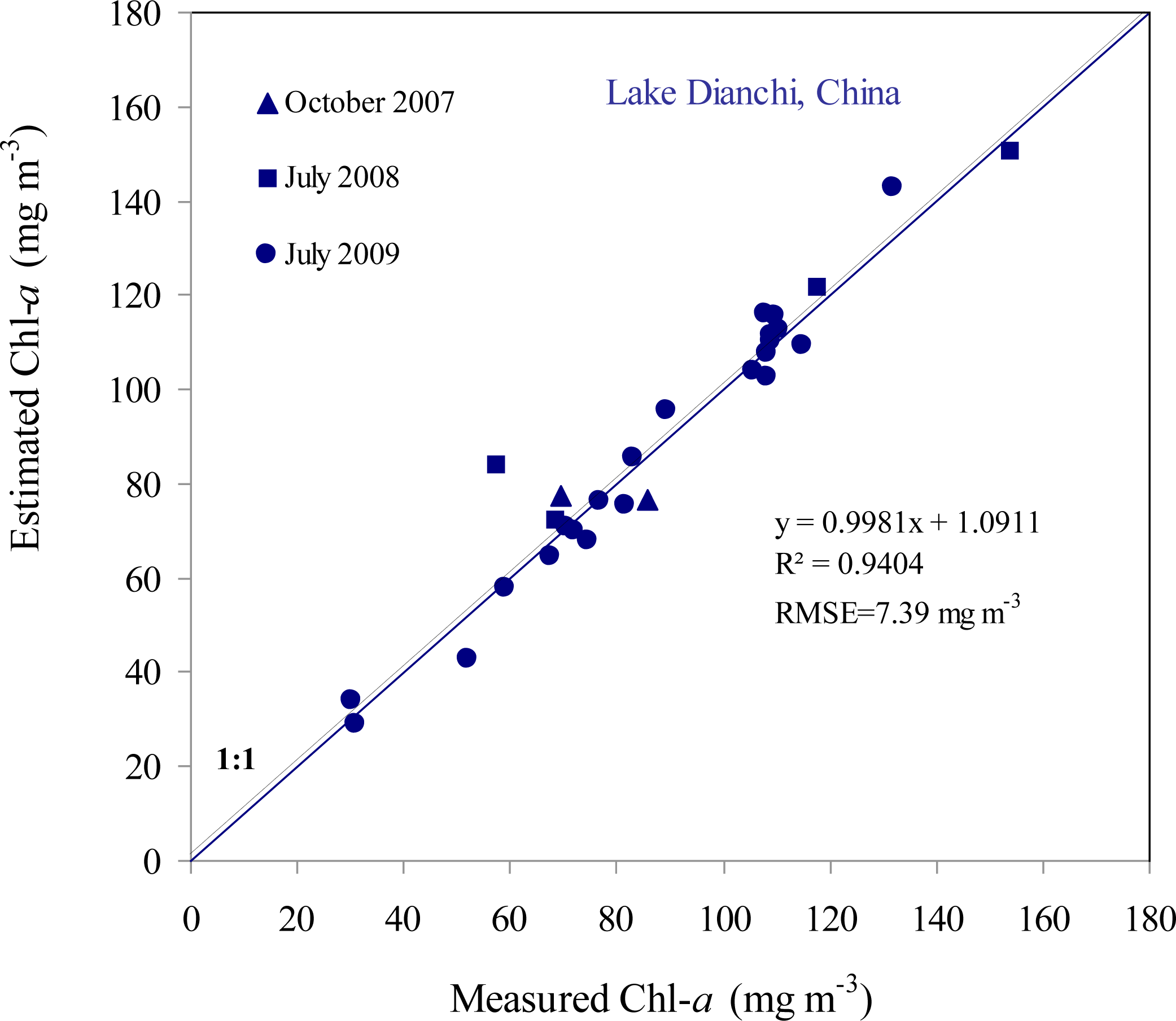
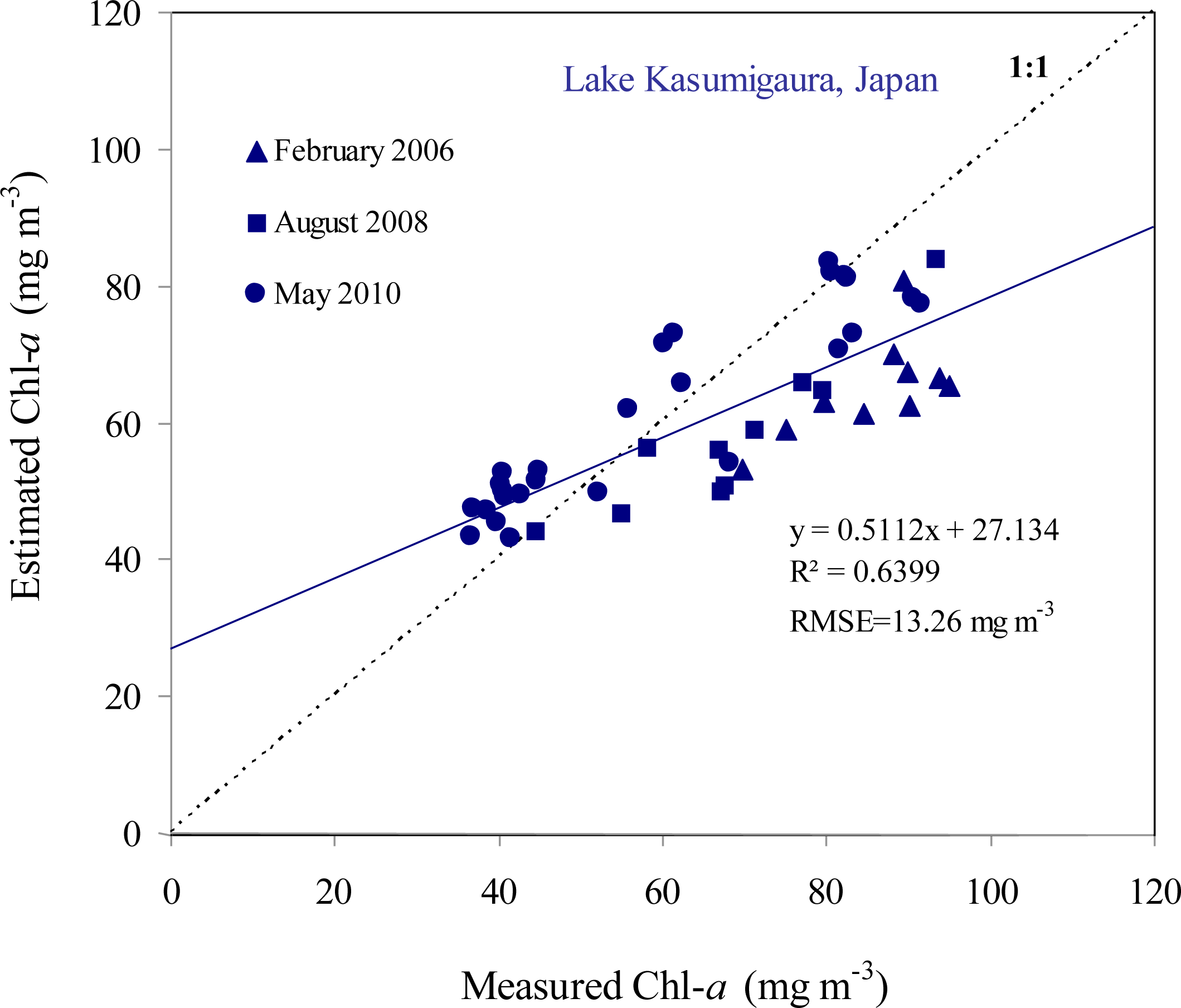
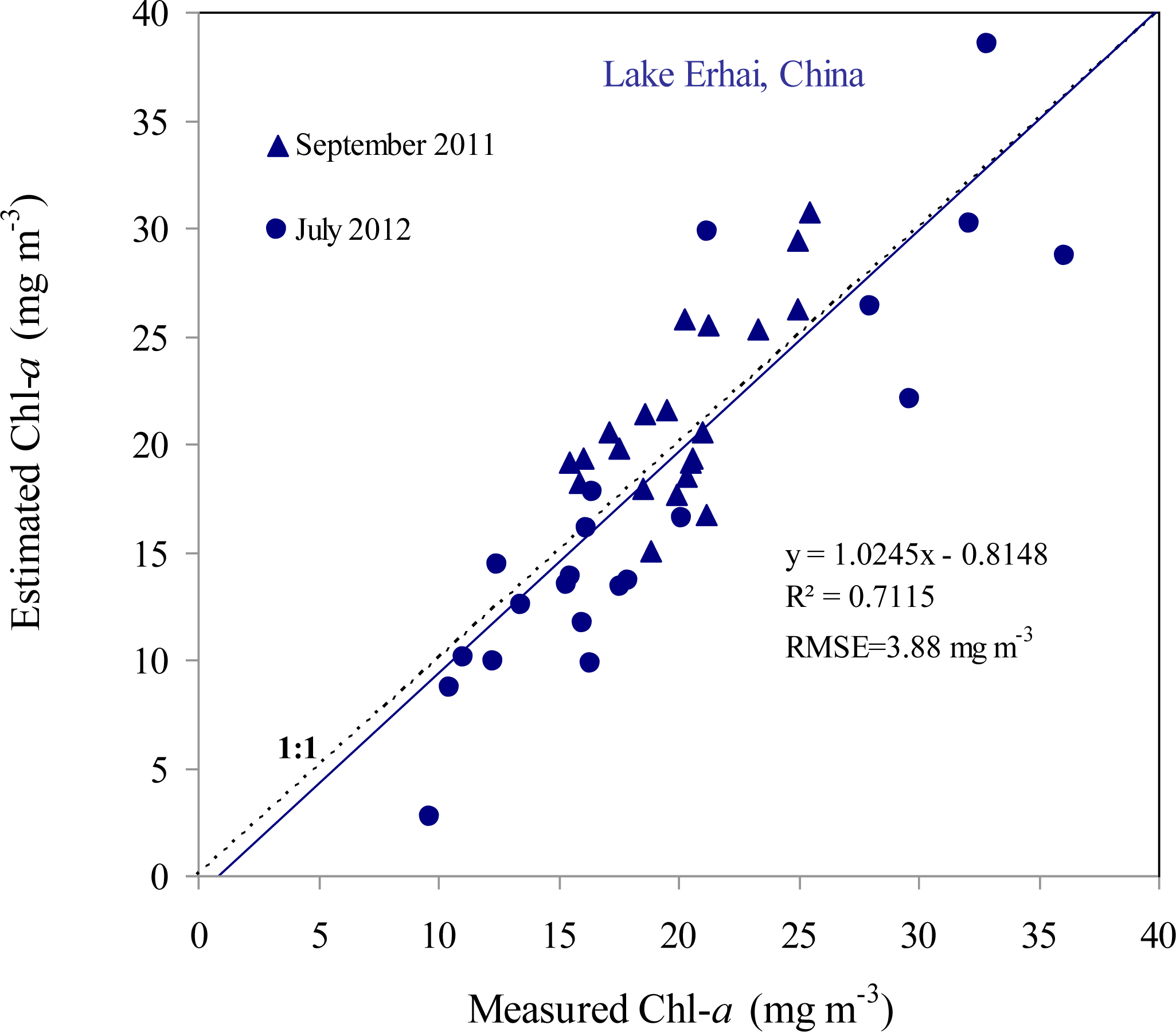
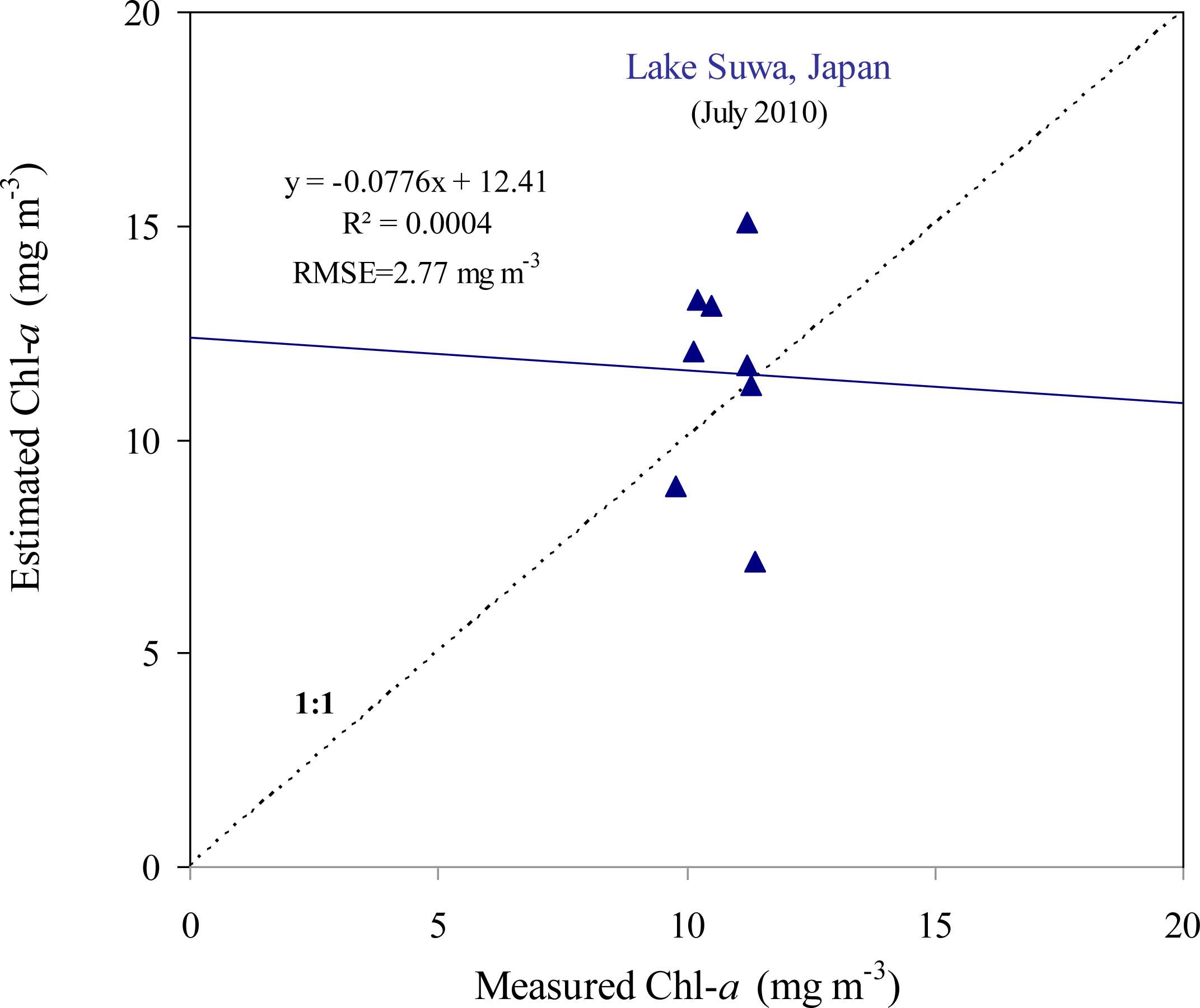
4.2. Performance of the SAMO-LUT Algorithm for Each Lake
4.3. Performance of the Simple 3-Band Model
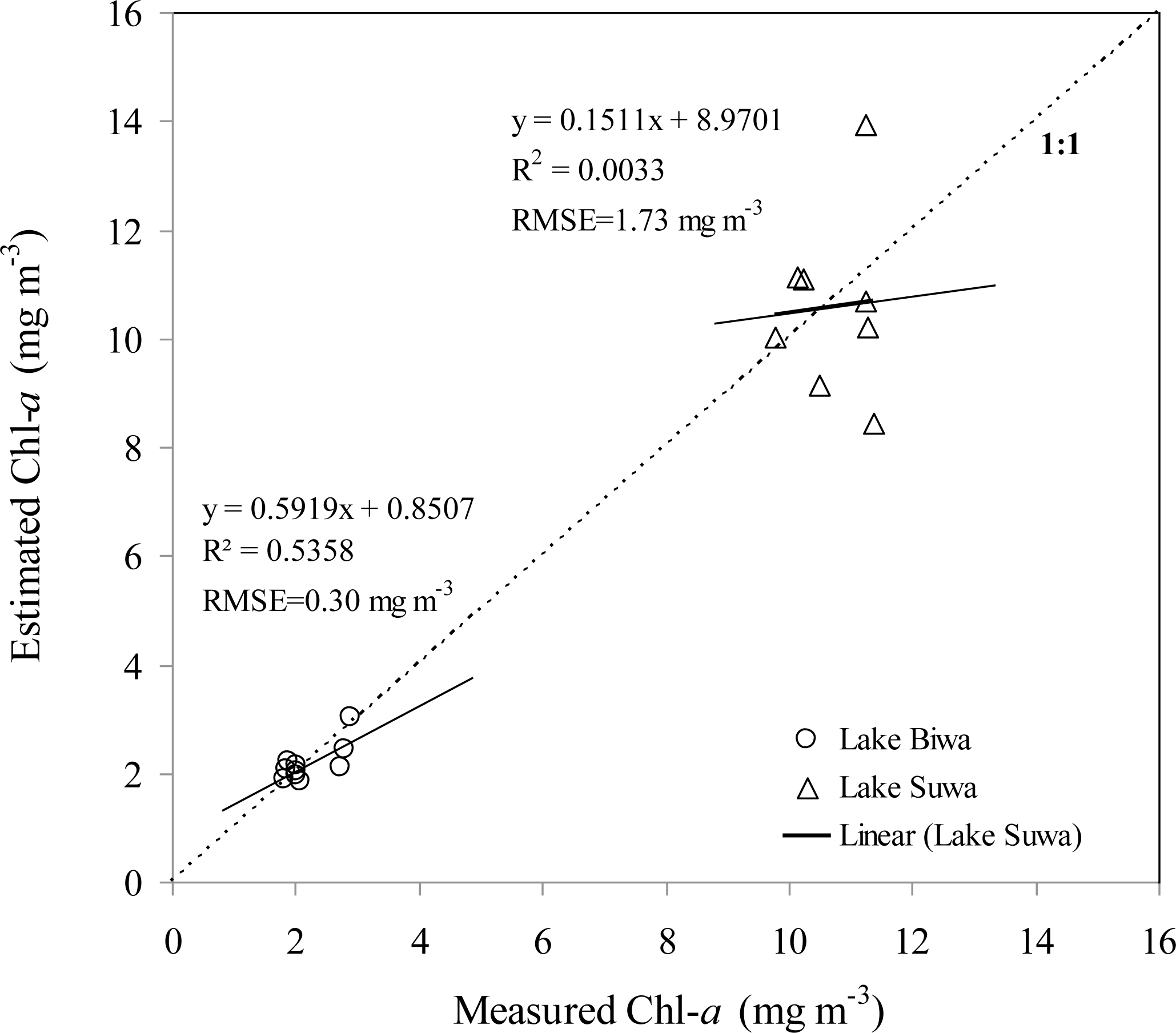
4.4. Application of a Blue-Green Algorithm to Clear Waters
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gilerson, A.A.; Gitelson, A.A.; Zhou, J.; Gurlin, D.; Moses, W.; Loannou, L.; Ahmed, S.A. Algorithms for remote estimation of chlorophyll-a in coastal and inland waters using red and near infrared bands. Opt. Express 2010, 18, 24109–24125. [Google Scholar]
- Gitelson, A.A.; Dall’Olmo, G.; Moses, W.; Rundquist, D.C.; Barrow, T.; Fisher, T.R.; Gurlin, D.; Holz, J. A simple semi-analytical model for remote estimation of chlorophyll-a in turbid waters: Validation. Remote Sens. Environ 2008, 112, 3582–3593. [Google Scholar]
- Gitelson, A.A.; Gurlin, D.; Moses, W.J.; Barrow, T. A bio-optical algorithm for the remote estimation of the chlorophyll-a concentration in case 2 waters. Environ. Res. Lett 2009, 4. [Google Scholar] [CrossRef]
- Gons, H.J. Optical teledetection of chlorophyll a in turbid inland waters. Environ. Sci. Tech 1999, 33, 127–1132. [Google Scholar]
- Moses, W.J.; Gitelson, A.A.; Perk, R.L.; Gurlin, D.; Rundquist, D.C.; Leavitt, B.C.; Barrow, T.M.; Brakhage, P. Estimation of chlorophyll-a concentration in turbid productive waters using airborne hyperspectral data. Water Res 2012, 46, 993–1004. [Google Scholar]
- El-Alem, A.; Cholmani, K.; Laurion, I.; Eo-Adlouni, S. Comparative analysis of four models to estimate chlorophyll-a concentration in case-2 waters using Moderate Resolution Imaging Spectroradiometer (MODIS) imagery. Remote Sens 2012, 4, 2373–2400. [Google Scholar]
- Dall’Olmo, G.; Gitelson, A.A.; Rundquist, D.C. Towards a unified approach for remote estimation of chlorophyll-a in both terrestrial vegetation and turbid productive waters. Geophy. Res. Lett 2003, 30. [Google Scholar] [CrossRef]
- Gurlin, D.; Gitelson, A.A.; Moses, W.J. Remote estimation of Chl-a concentration in turbid productive waters—Return to a simple two-band NIR-red model? Remote Sens. Environ 2011, 115, 3479–3490. [Google Scholar]
- Moses, W.J.; Gitelson, A.A.; Berdnikov, S.; Povazhnyy, V. Satellite estimation of chlorophyll-a concentration using the red and NIR bands of MERIS—The Azov sea case study. IEEE Geosci. Remote Sens. Lett 2009, 6, 845–849. [Google Scholar]
- Le, C.; Li, Y.; Sun, D.; Huang, C.; Lu, H. A four-band semi-analytical model for estimating chlorophyll a in highly turbid lakes: The case of Taihu Lake, China. Remote Sens. Environ 2009, 113, 1175–1182. [Google Scholar]
- Yang, W.; Matsushita, B.; Chen, J.; Fukushima, T. Estimating constituent concentrations in case II waters from MERIS satellite data by semi-analytical model optimizing and look-up tables. Remote Sens. Environ 2011, 115, 1247–1259. [Google Scholar] [Green Version]
- Yang, W.; Matsushita, B.; Chen, J.; Fukushima, B.; Ma, R. An enhanced three-band index for estimating chlorophyll-a in turbid case-II waters: Case studies of Lake Kasumigaura, Japan, and Lake Dianchi, China. IEEE Geosci. Remote Sens. Lett 2010, 7, 655–659. [Google Scholar]
- Fukushima, T.; Park, J.; Imai, A.; Matsushige, K. Dissolved organic carbon in a eutrophic lakes; dynamics, biodegradability and origin. Aquat. Sci. 1996, 58, 139–157. [Google Scholar]
- CGER, Lake Kasumigaura Database; National Institute for Environmental Studies: Tsukuba, Japan, 2010.
- Fukushima, T.; Kawamura, S.; Seki, T.; Onda, Y.; Imai, A.; Matsushige, K. Why has Lake Kasumigaura become turbid? In Verhandlungen. Verh. Int. Ver. Theor. Angew. Limnol 2005, 29, 732–737. [Google Scholar]
- Imai, A.; Matsushige, K.; Nagai, T. Triharomethane formation potential of dissolved organic matter in a shallow eutrophic lake. Water Res 2003, 37, 4284–4294. [Google Scholar]
- Zhang, Y.L.; Gin, B.Q; Chen, W.M.; Zhu, G.W. A preliminary study of chromophoric dissolved organic matter (CDOM) in Lake Taifu, a shallow subtropical lake in China. Acta Hydrochim. Hydrobiol 2005, 33, 315–323. [Google Scholar]
- Kutser, T.; Piersion, D.C.; Kallio, K.Y.; Reinart, A.; Sobek, S. Mapping lake CDOM by satellite remote sensing. Remote Sens. Environ 2005, 94, 535–540. [Google Scholar]
- Gao, L.; Zhou, J.M.; Yang, H.; Chen, J. Phosphorus fractions in sediment profiles and their potential contributions to eutrophication in Dianchi Lake. Environ. Geol 2005, 48, 835–844. [Google Scholar]
- Zheng, G.; Fu, B.; Duan, Y.; Wang, Q.; Matsuo, M.; Takano, B. Iron speciation related to colors of Jurassic sedimentary rocks in Turban Basin, Northwestern China. J. Radioanalyt. Nucl. Chem 2004, 26, 421–427. [Google Scholar]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt 1999, 38, 7442–7455. [Google Scholar]
- SCOR-UNESCO, Determination of Photosynthetic Pigment in Seawater. Monographs on Oceanographic Methodology; Imprimerie Rolland: Paris, France, 1966.
- Mitchell, B.G. Algorithms for determining the absorption coefficient of aquatic particulates using the quantitative filter technique. Proc. SPIE 1990. [Google Scholar] [CrossRef]
- Ammenberg, P.; Flink, P.; Lindell, T. Bio-optical modelling combined with remote sensing to assess water quality. Int. J. Remote Sens 2002, 23, 1621–1638. [Google Scholar]
- Odermatt, D.; Giardino, C.; Heege, T. Chlorophyll retrieval with MERIS Case-2-Regional in perialpine lakes. Remote Sens. Environ 2010, 114, 607–617. [Google Scholar] [Green Version]
- Simis, S.G.H.; Peters, S.W.M.; Gons, H.J. Remote sensing of the cyanobacterial pigment phycocyanin in turbid inland water. Limnol. Oceanogr 2005, 50, 237–245. [Google Scholar]
- Gitelson, A.; Keydan, G.; Shishkin, V. Inland waters quality assessment from satellite data in visible range of the spectrum. Soviet Remote Sens 1985, 6, 28–36. [Google Scholar]
- Gitelson, A.A. The peak near 700 nm on reflectance spectra of algae and water: Relationships of its magnitude and position with chlorophyll concentration. Internat. J. Remote Sens 1992, 13, 3367–3373. [Google Scholar]
- O’Reilly, J.E.; Maritorena, S.; Mitchell, B.G.; Siegel, D.A.; Carder, K.L.; Garver, S. Ocean color chlorophyll algorithms for SeaWiFS. J. Geophys. Res 1998, 103, 24937–24953. [Google Scholar]
- Yang, W.; Matsushita, B.; Chen, J.; Fukushima, T. A relaxed matrix inversion method for retrieving water constituent concentrations in case II waters: The case of Lake Kasumigaura, Japan. IEEE Trans. Geosci. Remote Sens 2011, 49, 3381–3392. [Google Scholar]
- Wang, Z.; Wang, Y.; Hu, M.; Li, Y.; Liu, Y.; Shen, Y.; Li, G.; Wang, G. Succession of the phytoplankton community in response to environmental factors in north Lake Erhai during 2009–2010. Fresenius Environ. Bull 2011, 20, 2221–2231. [Google Scholar]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The Global Monitoring for Environment and Security (GMES) Sentinel-3 mission. Remote Ses. Environ 2012, 120, 37–57. [Google Scholar]
- Devred, E.; Turpie, K.R.; Moses, W.; Klemas, V.V.; Moisan, T.; Babin, M.; Toro-Farmer, G.; Forget, M.-H.; Jo, Y.-H. Future retrievals of water column bio-optical properties using the Hyperspectral Infrared Imager (HyspIRI). Remote Sens. 2013, 5, 6812–6837. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chl-a (mg·m−3) | TSS (g·m−3) | ISS (g·m−3) | OSS (g·m−3) | CDOM (m−1) | ||
|---|---|---|---|---|---|---|
| Biwa | Min | 1.81 | 0.77 | 0.45 | 0.31 | 0.15 |
| Max | 2.90 | 1.99 | 1.49 | 0.49 | 0.26 | |
| Mean | 2.21 | 1.01 | 0.64 | 0.38 | 0.21 | |
| Median | 2.02 | 0.87 | 0.55 | 0.34 | 0.20 | |
| Stdev | 0.43 | 0.37 | 0.31 | 0.07 | 0.03 | |
| CV | 19.33 | 36.61 | 49.24 | 19.33 | 15.64 | |
| Suwa | Min | 9.79 | 4.81 | 1.21 | 3.30 | 0.41 |
| Max | 11.37 | 6.06 | 2.19 | 4.79 | 0.48 | |
| Mean | 10.72 | 5.37 | 1.65 | 3.72 | 0.44 | |
| Median | 10.86 | 5.42 | 1.56 | 3.59 | 0.44 | |
| Stdev | 0.63 | 0.43 | 0.40 | 0.45 | 0.02 | |
| CV | 5.87 | 8.02 | 24.37 | 12.12 | 5.38 | |
| Erhai | Min | 9.68 | 3.54 | 0.17 | 2.87 | 0.33 |
| Max | 36.08 | 11.29 | 1.62 | 10.63 | 0.56 | |
| Mean | 19.58 | 5.75 | 0.78 | 4.98 | 0.41 | |
| Median | 18.73 | 5.64 | 0.83 | 5.08 | 0.40 | |
| Stdev | 5.92 | 1.70 | 0.40 | 1.61 | 0.06 | |
| CV | 30.20 | 29.45 | 51.51 | 32.30 | 13.49 | |
| Kasumigaura | Min | 36.60 | 11.65 | 3.10 | 4.39 | 0.51 |
| Max | 95.02 | 47.90 | 37.30 | 11.70 | 1.78 | |
| Mean | 66.47 | 24.45 | 16.31 | 8.13 | 0.90 | |
| Median | 67.88 | 21.92 | 14.50 | 8.42 | 0.92 | |
| Stdev | 19.48 | 8.24 | 7.28 | 2.36 | 0.29 | |
| CV | 29.30 | 33.70 | 44.65 | 29.03 | 32.04 | |
| Dianchi | Min | 30.21 | 24.50 | 0.50 | 4.47 | 0.41 |
| Max | 153.92 | 55.00 | 42.27 | 46.50 | 3.98 | |
| Mean | 87.74 | 37.38 | 12.39 | 24.98 | 1.25 | |
| Median | 84.56 | 37.42 | 6.50 | 27.00 | 0.96 | |
| Stdev | 29.16 | 7.80 | 11.79 | 11.49 | 0.84 | |
| CV | 33.23 | 20.86 | 95.12 | 46.01 | 66.87 | |
| RMSE (mg·m−3) | NRMS(%) | MNB(%) | NMAE(%) | R2 | Slope | |
|---|---|---|---|---|---|---|
| Lake Dianchi, China (N = 28) | ||||||
| SAMO-LUT | 7.39 | 11.3 | 1.3 | 6.9 | 0.94 | 0.998 |
| Simple 3-band model | 8.81 | 13.73 | 3.08 | 8.04 | 0.91 | 0.931 |
| OC4E | 79.14 | 8.7 | −81.3 | 81.3 | 0.05 | 0.049 |
| RMSE (mg·m−3) | NRMS(%) | MNB(%) | NMAE(%) | R2 | Slope | |
|---|---|---|---|---|---|---|
| Lake Kasumigaura, Japan (N = 46) | ||||||
| SAMO-LUT | 13.26 | 18.4 | −3.9 | 16.2 | 0.64 | 0.511 |
| Simple 3-band model | 14.51 | 23.0 | 18.4 | 23.3 | 0.63 | 0.551 |
| OC4E | 59.60 | 13.1 | −78.8 | 78.8 | 0.50 | −0.143 |
| RMSE (mg·m−3) | NRMS(%) | MNB(%) | NMAE(%) | R2 | Slope | |
|---|---|---|---|---|---|---|
| Lake Erhai, China (N = 42) | ||||||
| SAMO-LUT | 3.88 | 21.2 | −2.8 | 17.1 | 0.71 | 1.025 |
| Simple 3-band model | 5.67 | 30.3 | −19.4 | 26.6 | 0.74 | 1.306 |
| OC4E | 12.28 | 18.4 | −50.1 | 50.3 | 0.01 | 0.047 |
| RMSE (mg·m−3) | NRMS(%) | MNB(%) | NMAE(%) | R2 | Slope | |
|---|---|---|---|---|---|---|
| Lake Suwa, Japan (N = 8) | ||||||
| SAMO-LUT | 2.77 | 23.9 | 8.3 | 19.8 | 0.0004 | −0.078 |
| Simple 3-band model | 4.72 | 32.2 | −31.3 | 33.5 | 0.0007 | 0.147 |
| OC4E | 1.73 | 15.6 | −1.0 | 12.2 | 0.0033 | 0.151 |
| RMSE (mg·m−3) | NRMS(%) | MNB(%) | NMAE(%) | R2 | Slope | |
|---|---|---|---|---|---|---|
| Lake Biwa, Japan (N = 10) | ||||||
| SAMO-LUT | 5.90 | 141.5 | 221.8 | 221.8 | 0.07 | 1.953 |
| Simple 3-band model | 20.84 | 276.83 | −917.58 | 917.58 | 0.11 | −4.39 |
| OC4E | 0.30 | 12.3 | −1.1 | 9.4 | 0.54 | 0.592 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Yu, G.; Yang, W.; Matsushita, B.; Li, R.; Oyama, Y.; Fukushima, T. Remote Estimation of Chlorophyll-a in Inland Waters by a NIR-Red-Based Algorithm: Validation in Asian Lakes. Remote Sens. 2014, 6, 3492-3510. https://doi.org/10.3390/rs6043492
Yu G, Yang W, Matsushita B, Li R, Oyama Y, Fukushima T. Remote Estimation of Chlorophyll-a in Inland Waters by a NIR-Red-Based Algorithm: Validation in Asian Lakes. Remote Sensing. 2014; 6(4):3492-3510. https://doi.org/10.3390/rs6043492
Chicago/Turabian StyleYu, Gongliang, Wei Yang, Bunkei Matsushita, Renhui Li, Yoichi Oyama, and Takehiko Fukushima. 2014. "Remote Estimation of Chlorophyll-a in Inland Waters by a NIR-Red-Based Algorithm: Validation in Asian Lakes" Remote Sensing 6, no. 4: 3492-3510. https://doi.org/10.3390/rs6043492
APA StyleYu, G., Yang, W., Matsushita, B., Li, R., Oyama, Y., & Fukushima, T. (2014). Remote Estimation of Chlorophyll-a in Inland Waters by a NIR-Red-Based Algorithm: Validation in Asian Lakes. Remote Sensing, 6(4), 3492-3510. https://doi.org/10.3390/rs6043492