1. Introduction
There is a significant international interest regarding accurate estimations of carbon sequestration [
1–
4]. Sweden is well placed for undertaking research into forest variables at both small scale (tree-level) and large scale (national level) due to its significant areas of forest land (28.1 million ha) and its well-established research structure. The Swedish National Forest Inventory (NFI) carries out an inventory on about 11,000 field plots [
5], annually, in Sweden. In combination with remote sensing data from, e.g., airborne laser scanning (ALS), accurate estimations of the current state of the forest can be obtained [
6]. It is established that ALS can provide very accurate estimates of heights and forest related variables [
7–
9] and can be used for creating digital terrain models (DTMs) to describe ground elevation. However, the airborne platform for ALS is relative expensive and it can, therefore, not be used for frequent inventories, e.g., on an annual basis over large areas. Satellite-borne sensors can cover large areas and often have very short repeat periods, commonly within one to two weeks. Optical satellite sensors can suffer from problems with cloud cover, especially in regions around the equator, but also at northern latitudes. Satellite radar sensors, however, with their active techniques, overcome this issue and currently seem to be one of the more attractive options [
10] for carrying out frequent remote sensing of forests. From radar data a digital surface model (DSM) can be calculated, coinciding with the DTM in open regions while also describing the upper vegetation canopy in vegetated areas. As is the case in many countries, the ground elevation is well known in Sweden thanks to extensive ALS scans. The difference between the DSM and the DTM will be referred to as canopy height model (CHM) and contains information related to the forest above-ground biomass (AGB) and basal area-weighted tree height (H).
Synthetic aperture radar (SAR) acquires images with backscatter intensity, phase, and finally, also the distance, based on the time for the transmitted signal to return to the receiver. The last decade has seen a dominance of interferometric SAR (InSAR) and polarimetric InSAR (PolInSAR), both making use of the phase and its polarization of the radar signal, while older techniques historically used for optical imagery have received less attention. With the launch of the German TerraSAR-X and the Italian COSMO-SkyMed satellites, in 2007, radargrammetric processing (first used in the 1960s, [
11]) has taken an important step forward. Both these satellites have spatial resolutions on the order of 1 m [
12], offer various look angles, and have accurate geolocation. This geolocation accuracy was reported to be on the order of less than 1 m [
13] and independent studies have later verified this [
14,
15], e.g., by using corner reflectors and the boundary condition that they are projected on known elevations. Raggam
et al. [
16] could not fully validate this accuracy, but, nevertheless, concluded an overall accuracy of about 2 m. They also concluded that sensor model adjustments were sensitive with regards to Multi Looked Ground-Range Detected (MGD) products and that stereo mapping is a very challenging objective, in particular over forested or other terrain with high radiometric variability.
Radargrammetry uses the stereoscopic viewing well-known from optical photogrammetry, applied to radar images. Instead of the optical wavelengths, the aforementioned satellite sensors operate in the X-band with about 0.03 m wavelength. Radargrammetry, in contrast to InSAR or PolInSAR, uses the backscatter intensity, similar to the optical case, to form images used for stereo matching. The backscattered intensity images need to be acquired from different incident angles (causing intersection angles) to possess the inherent disparities of an object appearing slightly different from different directions. The measured parallaxes between the two images are directly correlated to the terrain elevation. In the case of forest vegetation, X-band signals are unlikely to reach the ground, but instead to slightly penetrate the upper canopy down to different depths depending on many factors such as transmissivity, tree density, tree species, and temperature.
In general, the observed parallaxes can be estimated with a higher degree of accuracy as the angle of intersection increases (as the stereo exaggeration factor increases). However, in contrast to this, it is required that the images are as similar as possible in order to improve the image matching which is best achieved with small intersection angles. It was concluded in [
17] that the larger intersection angle, the more the quality of the stereoscopic fusion deteriorates and this becomes even more pronounced with high-relief terrain. The principal parameters influencing the DSM accuracy the most are the type of the relief and its slope. The common compromise has been to use same-side stereo-pairs with intersection angles of about 8–20° [
17–
19]. This will generally result in reasonable geometric and radiometric disparities and the data will be suitable for the radargrammetric processing.
Many studies have been performed with TerraSAR-X data, but the majority have focused either on the accuracy of the elevation reconstruction, the geolocation or other technical properties, describing it more as an instrument comparative with, e.g., ALS. Some of the earliest studies deriving forest related variables from TerraSAR-X data are described in [
20–
22]. They found that the accuracy of the derived DSMs were very high over bare ground while regions of forest were underestimated in the range of 25%–35% compared to the real canopy height, with an average underestimation of 27%. They also concluded that additional experiments over different types of forest are needed to establish if this underestimation would be reduced on a large scale. These early forest studies were extended in [
23]. As mainly dense stands of deciduous trees were used, it was also stated that the canopy height underestimation was expected to be larger for coniferous trees and for clearer stands. No seasonal effects (frozen/unfrozen) or the influence of weather conditions could be studied as all images used in the study were acquired during April–June and no weather differences were present. This was also the case in [
24] where the authors carried out Random Forest evaluation of forest using 109 field plots with 8 m radius, using only spring-time images. They found that the forest stem volume could be predicted with 34.0% relative root mean square error (RMSE) and the mean forest canopy height with 14.0%. Overall, the authors concluded that the influences of tree species, seasonal effects, and weather conditions have to be studied further. A further study [
25] from primarily the same authors utilized the same field and SAR data, but investigated plot-level estimations of AGB and stem volume compared to ALS estimates. The authors concluded that radargrammetry is a promising technique for this and that AGB and stem volume could be estimated with 29.9% and 30.2% relative accuracy in comparison with 21.9% and 24.8% for ALS. They also concluded that further studies on radargrammetry for large-area mapping are needed.
The study presented here puts a larger emphasis on forestry conditions and less on the technical aspects, trying to cover as many of the previously addressed issues as possible; i.e., using pre-stratified forest stand maps with a variety of stand sizes, ALS reference data combined with manually measured field plots, and different test sites with varying site conditions containing different tree species. The different test sites facilitate an analysis of the influence of the topography. The overall objective of thisstudy is to evaluate the potential of using radargrammetry with TerraSAR-X images for estimating basal area-weighted tree height and the strongly related variable above-ground biomass at stand level.
5. Discussion
The adjusted R
2 differed between the test sites while the relative RMSE values were more similar. The AGB could be best modeled at Remningstorp where the adjusted R
2 was 0.81 and the relative RMSE was 22.9%. This is a distinctly lower relative RMSE than in the study by [
25], that reported 29.9%, however, this study reported results at plot level. In this context the results presented here are reasonable and a reasonable value for estimating AGB at stand level. These results can be seen as a contribution to the suggested further research within large-area forest AGB mapping suggested by [
25].
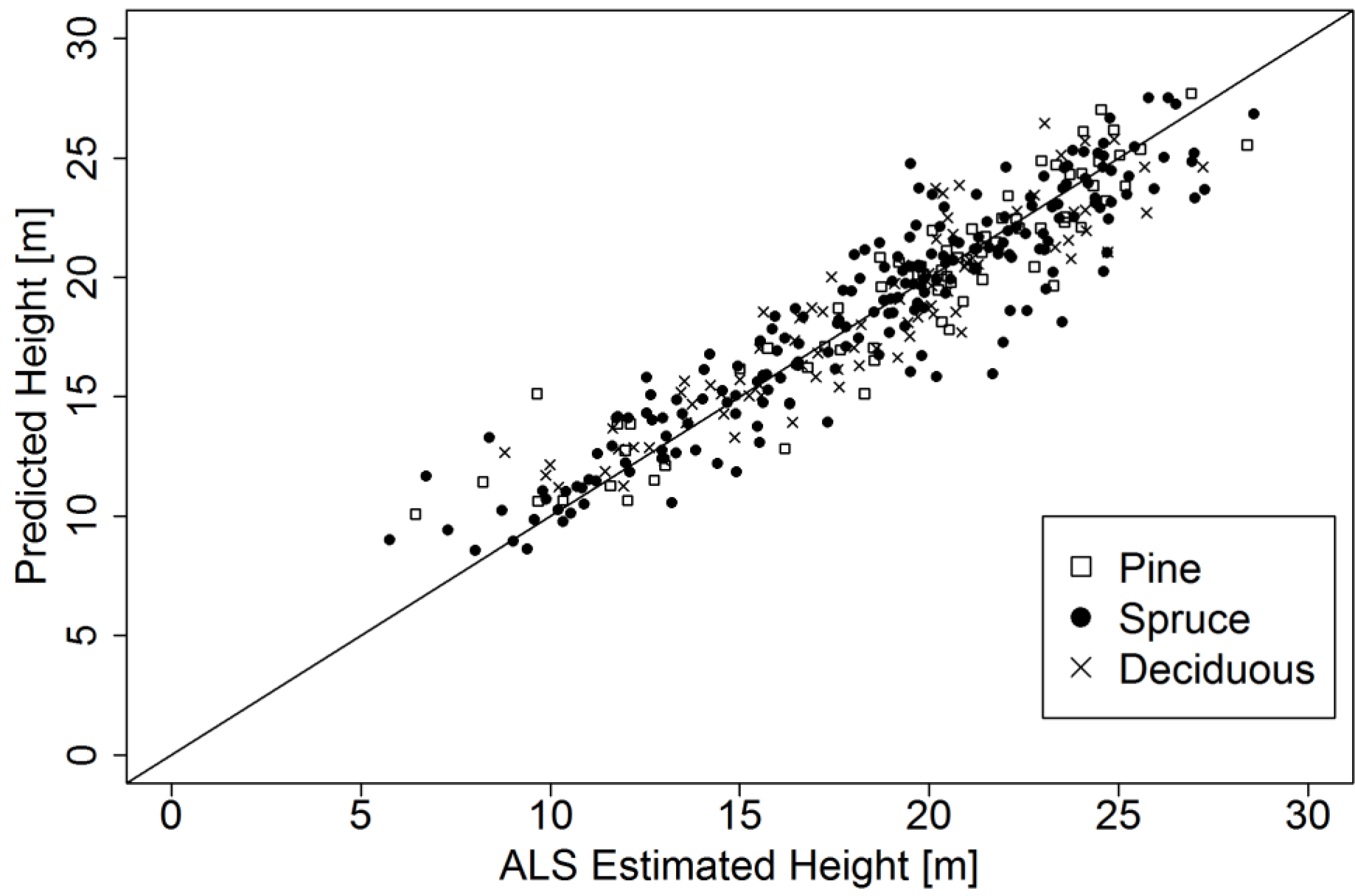
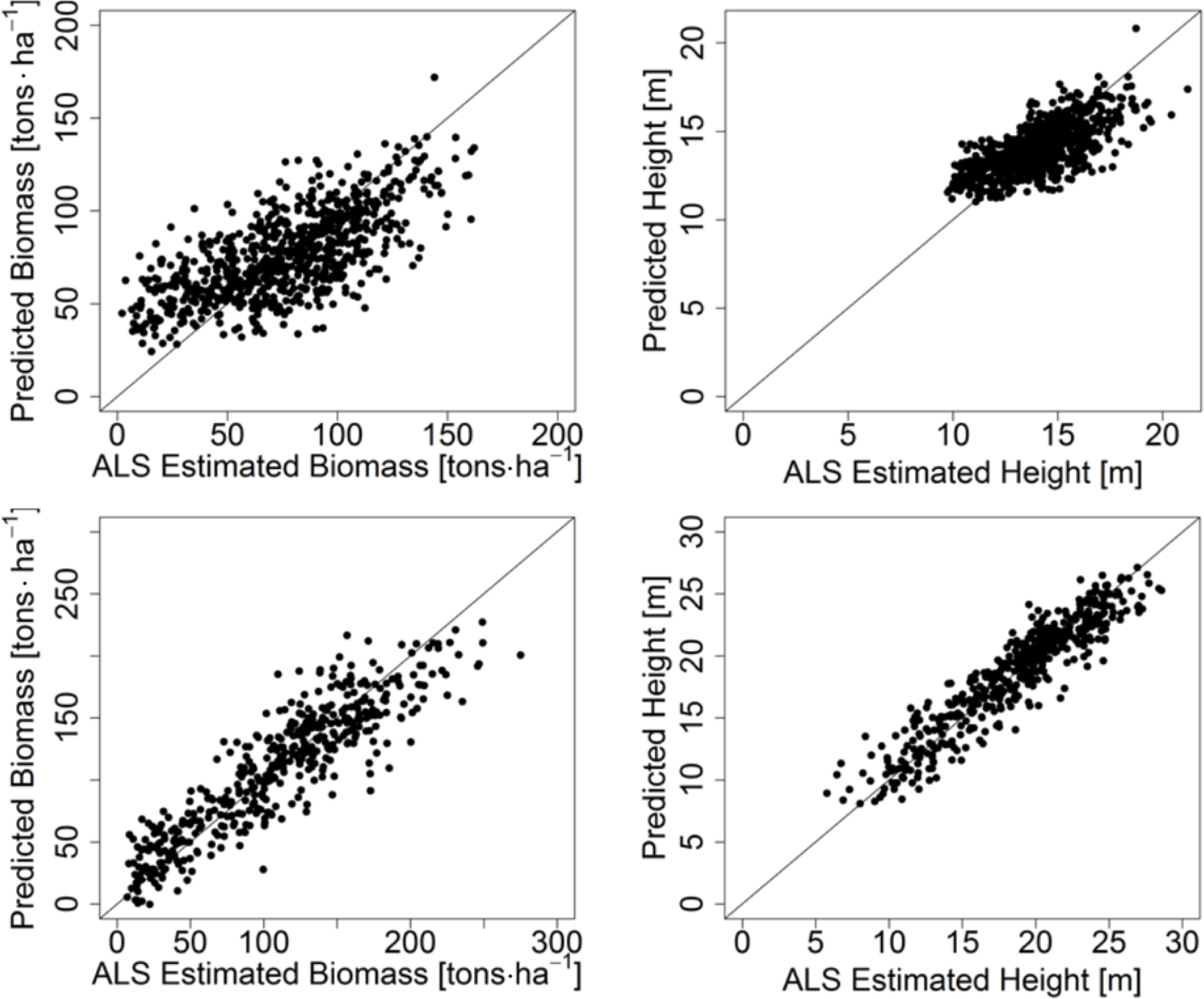
With regards to the H estimations, the adjusted R
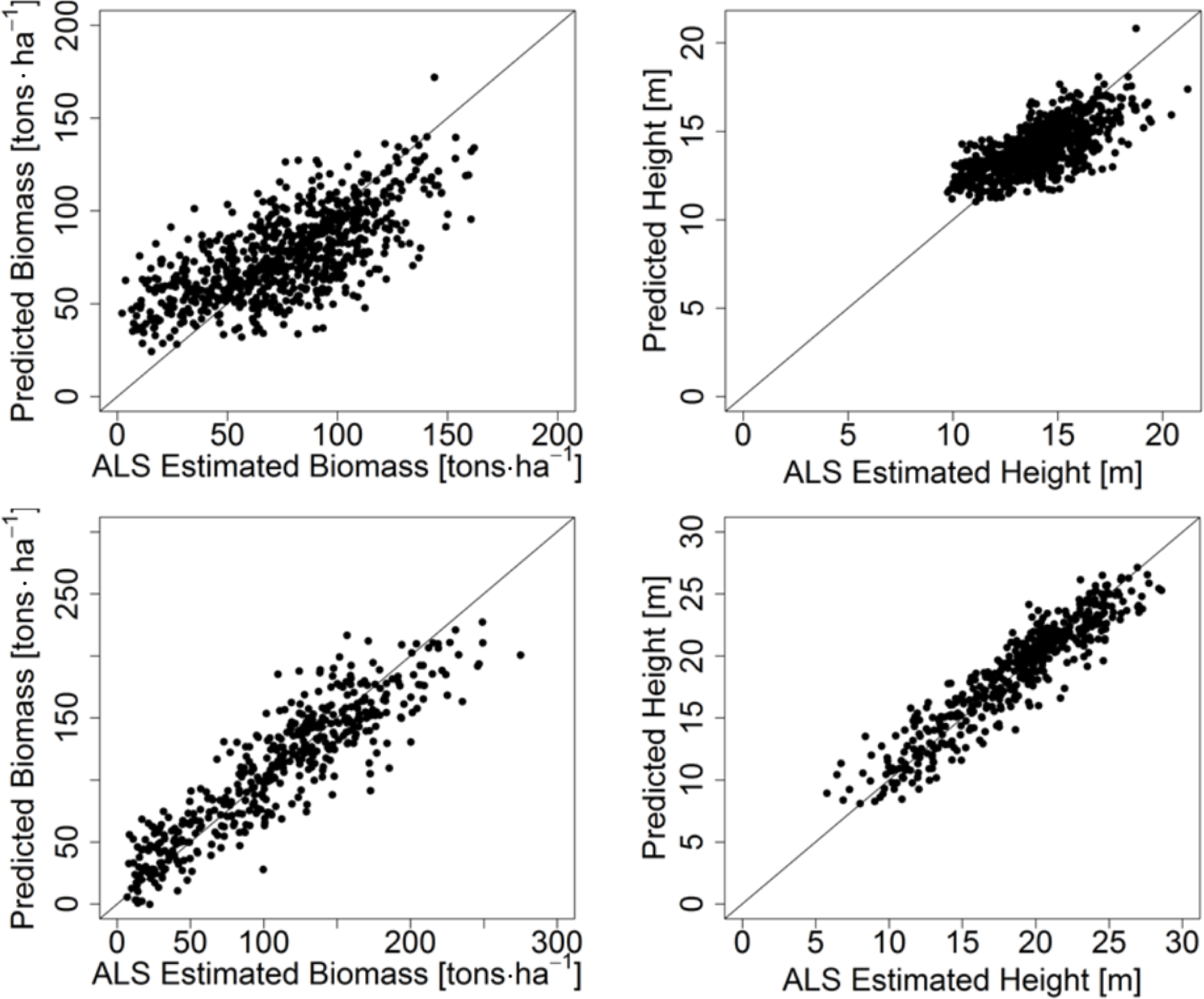
2 was 0.87 and 9.4% in terms of relative RMSE at Remningstorp. The scatter plots showed a relatively large distribution for the regression functions for Krycklan (
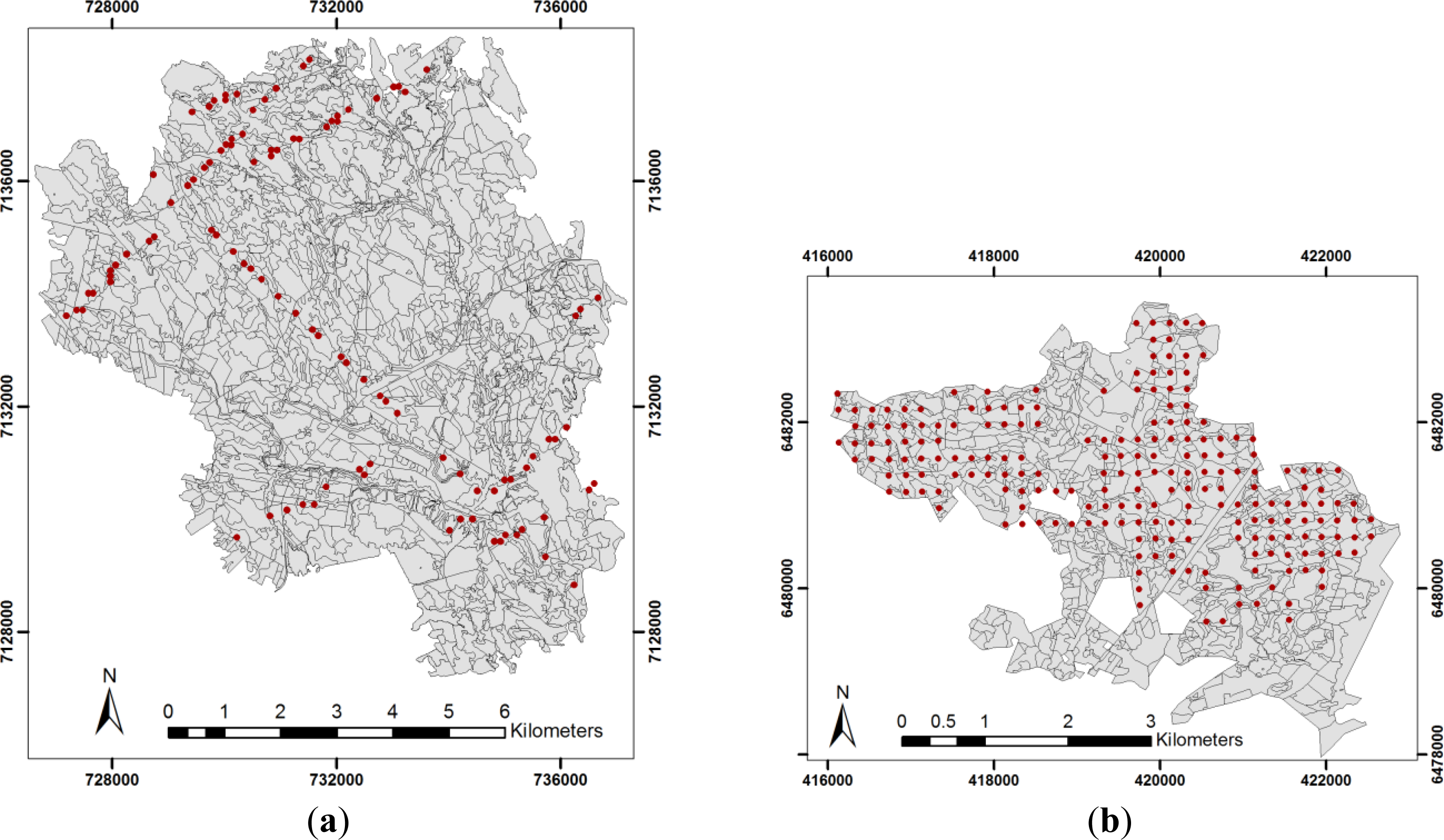
Figure 5, top right), which has a smaller range of available biomasses and tree heights. This suggests a lower height sensitivity at Krycklan, which is likely due to the combination of lower quality radar data and less accurate reference data than for Remningstorp. At Krycklan, 110 field plots were extrapolated to cover 6780 ha compared to Remningstorp where 212 field plots were extrapolated to 1200 ha. As all the radar data from Remningstorp were acquired in HS mode, these present a much higher detail quality (
Figure 3) than for Krycklan where the radar images were acquired in SL or SM mode. The scatter plot (
Figure 5, bottom) also reflects this, showing a more linear trend with low spread, leading to the significant difference in adjusted R
2.
From manual inspection, it was found that many of the stands with largest estimation errors of AGB and H were young forests with low forest heights or sparse forest. This is rather often the case in Krycklan and less frequent in Remningstorp. These forests often show a different proportional relationship between AGB and H compared to more mature forests. The young and sparse forest stands were not easily eliminated, as they both contained low and high AGB, and sometimes low and sometimes relatively high heights, without possessing high AGB. The entire range of H is limited especially in Krycklan, causing strong leverage effects for the remaining stands and not resulting in better overall models. It is fair to assume that the usually thinner, still tall, stems in younger forests get penetrated to a higher degree than mature forests, while the manual field measures still reach high H. In summary, AGB and H for young forest stands are more difficult to estimate accurately with X-band radar.
The effects of the incidence angles of the radar images could not be examined due to a limited number of SAR images, however the effects of the intersection angles were shown to be ambiguous. Previous studies [
17–
19] have concluded that the optimal intersection angles should be about 8–20°. The data in this study can generally verify this as all the successful image matchings in the study used image pairs with intersection angles between 6.9° and 15.3°. However, the conclusion that a larger intersection angle within this span would result in a better height precision can only be confirmed for certain conditions. Matching results from the Krycklan test site showed better results for 6.9° intersection angle than 8.4°, but that the 15.3° image pair showed the best results. The reason for this is not entirely clear, but it is likely that the lower radar image quality of the image KR1 caused the resulting poorer results. In addition, the temporal difference between the SAR images was larger with KR1. These results can be seen to validate the claim by [
17]; “
For example, larger ray intersection angles and higher spatial resolution do not translate into higher accuracy. In various experiments, accuracy trends even reverse, especially for rough topography”. Krycklan is more strongly influenced by its hillier topography than Remningstorp and fits well into this statement.
It was shown in [
21,
35] that image triplets,
i.e., combining three images with different incidence angles, can make use of both the higher similarities between images with small intersection angles and the increased parallaxes precisions to create more accurate DSMs. This could not be verified in this study, however, we see no reason to doubt that this is the case, assuming all the images included in the triplet bear the same quality.
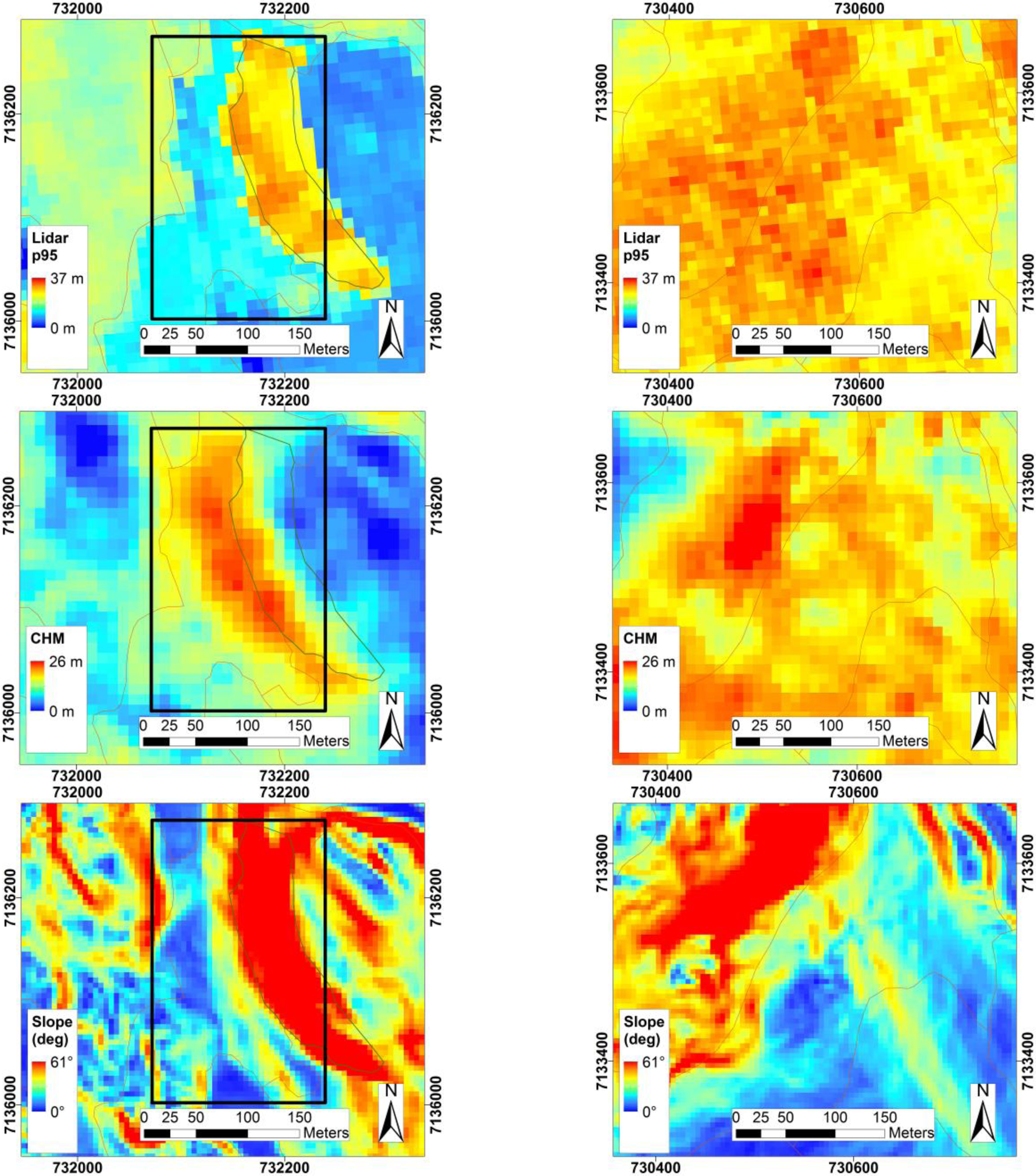
A crucial part of the image matching involved selecting appropriate search window sizes and this clearly depended on the topography. It was noted that the Krycklan test site required a search windows on the order of 10 times larger than for Remningstorp, which was entirely a consequence of the hillier topography. This unfortunately also leads to more false matches, especially in highly heterogeneous terrain. This became clear when a few stands lying in dehydrated river beds were investigated. The ground elevation went down while the DSM remained constant, resulting in unusually high heights in the CHM (
Figures 5 and
7).
All radar images used for Krycklan were taken during rainy days with some precipitation and only one acquisition from Remningstorp was affected by precipitation. All DSMs derived from rain influenced images show a lower correlation to the reference data, however due to the many factors that can also potentially affect the results (such as different resolutions, reference data and temporal differences), from the data presented here there is not a strong enough base to conclude that rain has a direct effect on the results. This is however an area that should be investigated further in future studies. All our data sets were acquired in the late summer to late fall (in Krycklan the fall has often already passed in mid-October) and nothing can therefore be concluded about the possible effects of winter images with frozen conditions. This study does however contribute to the general knowledge base by extending the different seasons thus far investigated within radargrammetry [
23,
24] with another season.
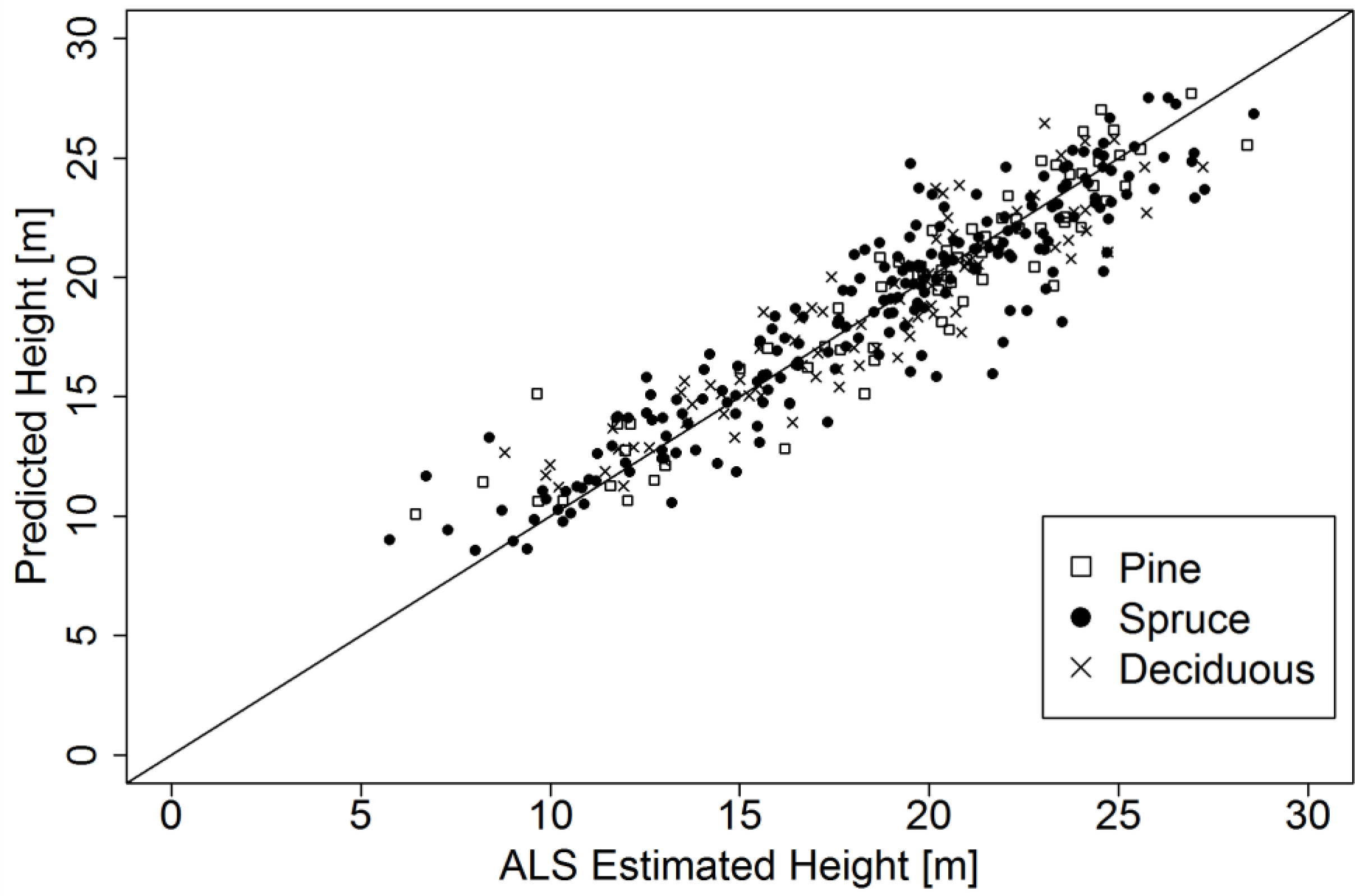
The very comprehensive study presented in [
23] was essentially accomplished in pure deciduous forest conditions and the present study together with [
24] complements [
23] by covering mostly boreal forests made up of essentially pine and spruce stands. The first extended analysis showed that it was not necessary to develop species independent models as long as leaf-on conditions were supplied. Pine, spruce and deciduous (mainly birch) stands seemed to interact in a similar manner to the X-band radar, at least with radargrammetry in boreal forests. At the Krycklan site, the images were acquired during leaf-off conditions and, here, it is also clear that the regression models for deciduous stands did not hold, whereas pine and spruce still responded in line with the overall test site results and also more in line with those from the Remningstorp test site.
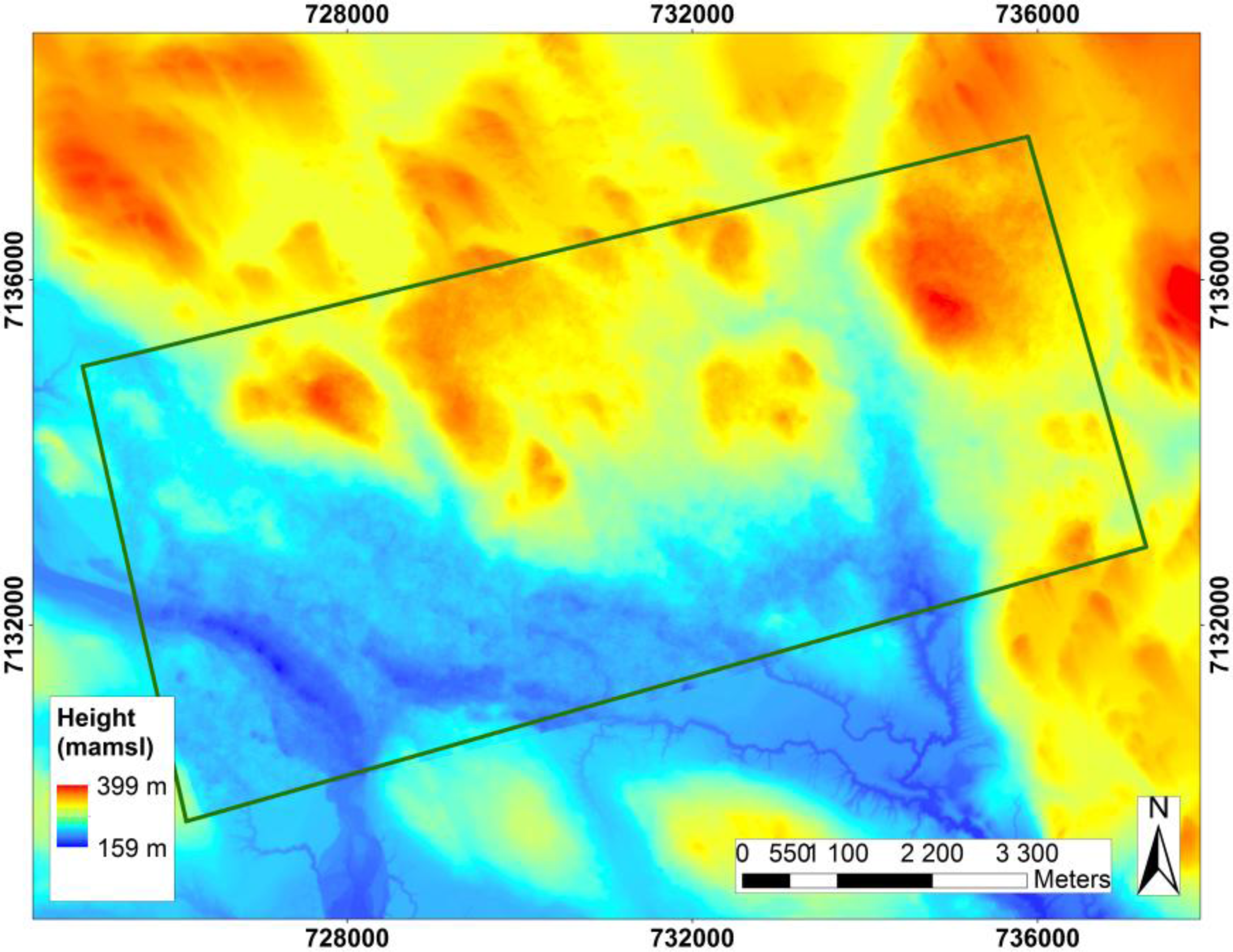
It can be noted that the topography (in addition to the intersection angle and resolution) factor most strongly influencing whether or not a usable full coverage DSM is obtained. This is in agreement with [
40] where the authors showed that the principal parameters influencing the accuracy of the DTM are the type of the relief and its slope. In the second extended study presented here this topography problem was rudimentarily tackled by dividing the forest stands into slope classes, where the mean slope of the stand determined its assignment to one of the classes 0–2°, 2–4°, 4–6°, 6–8°, or >8°. The regression models were also complemented with the slope, aspect and the product of these two variables as additional independent variables explaining the AGB and H. It was found that an overall trend could be seen with an increase in the relative RMSE in connection with an increase of the mean slope. It could also be discerned that the product slope×aspect became significant for all regression models >4° and that topography had an influence in sparse conifer forests (as was the case at Krycklan) already from small mean slope values. In practice, these stands often included stronger slopes above 10° even if the average slope finished up in a lower defined slope class.
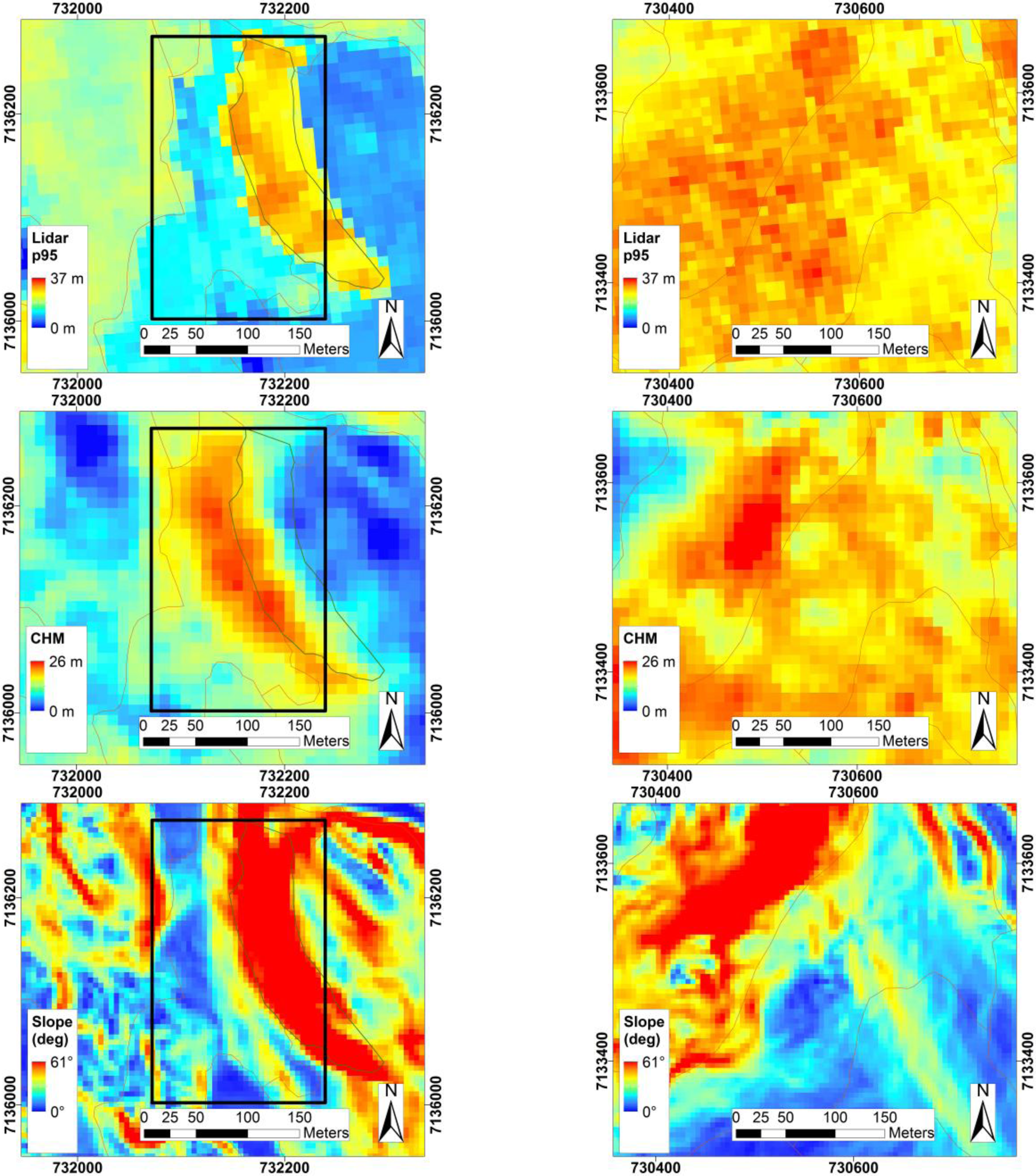
From visual inspection (
Figure 7), it was noted that the results from the slope class models did not give a complete or even fair understanding of the problem. Krycklan with its hilly topography contains many regions with slopes up to 61°. The DSM outcome was heavy influenced by shadowing, foreshortening and layover effects that shifted the heights into completely different stands than where the actual slope was located. In comparison, Remningstorp with its moderate topography was far simpler to process and showed lower residuals. This implied that the shape of the stand appeared to have a significant effect on the outcome. When narrow stands (only a few 10 m wide) were located next to strong slopes, the slope effects spilled over on to the neighboring stands often resulting in a shift in their actual locations (
Figure 7). When the stands had a more compact shape (like a circle or a square), the mean height to a greater degree got smeared out by the entire stand mean pixels.
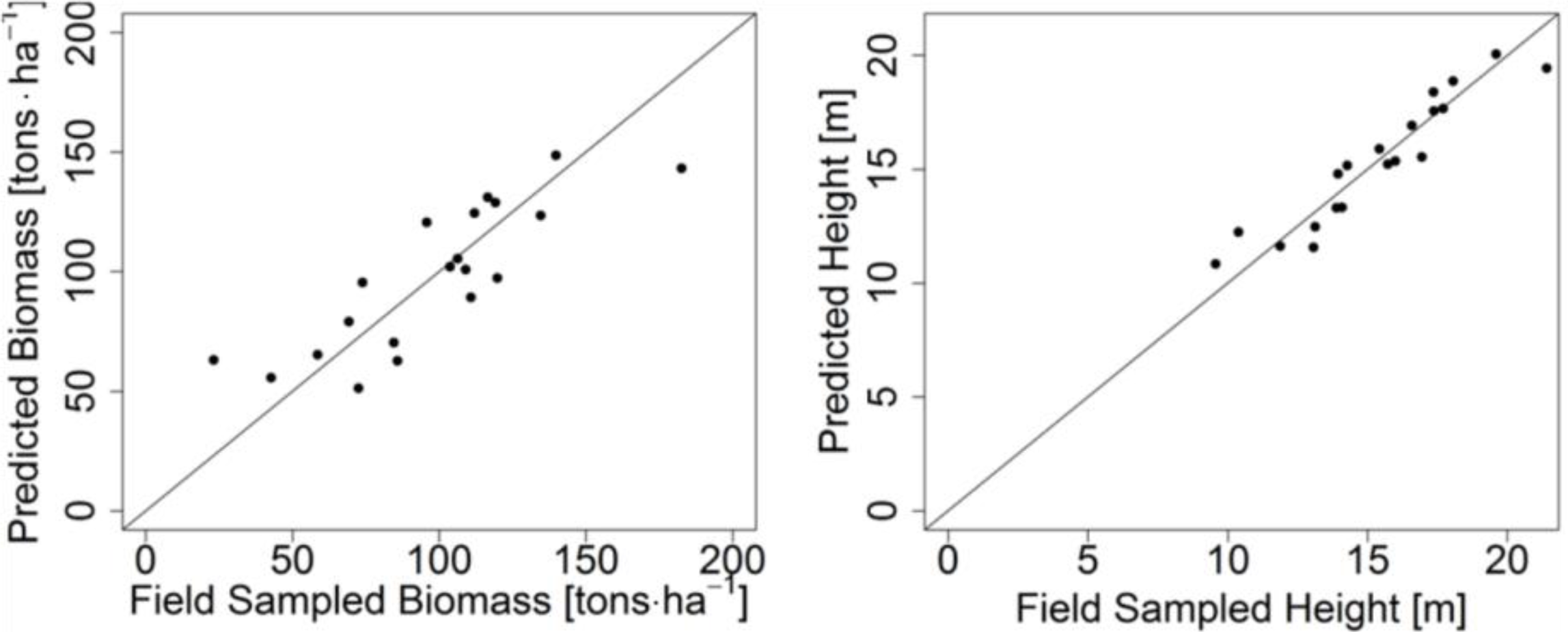
In the third extended study, yet another approach was tried in order to address this topography related problem and eliminate ambiguities related to slopes. Independently inventoried reference field data from the BioSAR 2008 campaign [
29] was used for estimating AGB and H at Krycklan. Out of the entire set of stands previously used at Krycklan, 20 stands had intersecting TerraSAR-X data and densely sampled field data. These stands were located in flatter terrain with a lower level of surrounding slopes and if the stands did contain slopes they did not have as large standard deviations of the slopes, meaning that the shifting effects became much smaller. The AGB could now be estimated with an adjusted R
2 that was 0.66 and for H it was 0.87 (compared to 0.48 and 0.49 respectively with regards to the entire Krycklan test site). The relative RMSE was also reduced to 23.5% and 7.7% (
Table 11) for AGB and H, respectively, compared to the entire test site values of 31.6% and 10.3% (
Tables 4 and
5). With such a small data set, despite a higher quality, the modeling resulted in a certain degree of overfitting with q values equal to 1.20. Nonetheless, cautious conclusions indicate that by using the stands located on flatter terrain at Krycklan, results on the same order as Remningstorp can be attained. This demonstrates the robustness of radargrammetry and would also further validate its use for forestry applications with the careful consideration of the possible topography effects.
6. Conclusions
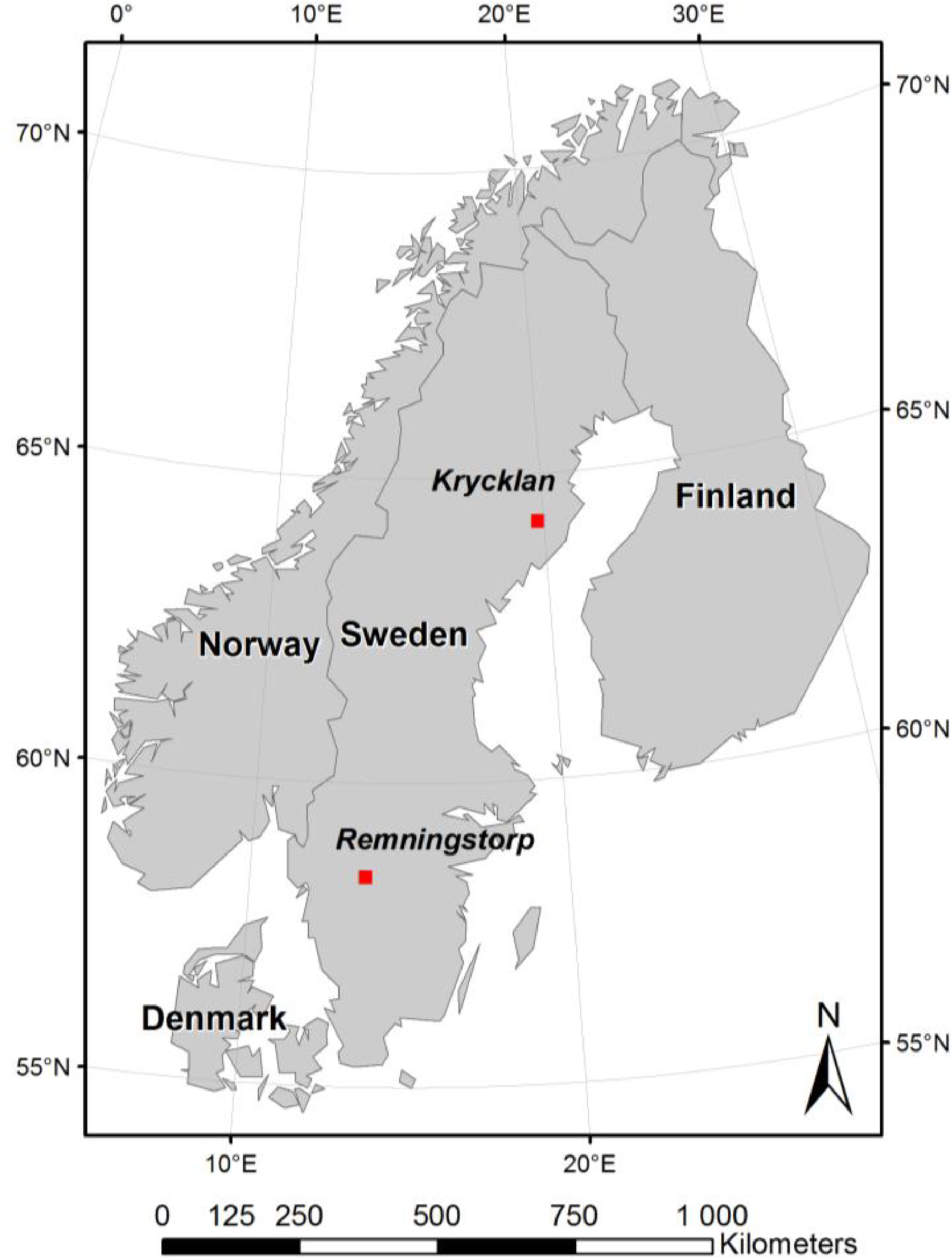
By using TerraSAR-X data acquired from different view angles, DSMs could be created using radargrammetry for the two test sites; Krycklan and Remningstorp, located in northern and southern Sweden, respectively. Highly accurate DTMs from ALS were available for the test sites and the elevation differences were calculated to derive CHMs for both test sites. Reference data consisting of field measured plots from the same years as the radar and ALS data were acquired, were extrapolated by ALS measured height percentiles and density measures to create reference rasters describing AGB and H. Different CHM metrics, where the mean height was most important, were used to model the AGB and H using multiple linear regression.
This study has shown that radargrammetry is a powerful technique which can be used with high resolution X-band SAR data for estimating AGB and H. Images with intersection angles in the range of 8–16° have shown to deliver accurate DSMs. When these can be combined with accurate ALS derived DTMs, AGB on the order of 25%–30% relative RMSE and H on the order of 10% at stand level are realistic. Young forests can be difficult to estimate correctly and potentially should be assigned to their own species class. During leaf-on conditions, different tree species in the boreal forests interact in a similar fashion to the X-band radar waves. Seasonal effects, as well as weather effects, have not been evaluated and should be subject to future research. Regions with more varied topography or sudden changes in DTMs are likely to lead to large local deviations and might have to be aggregated in order to give more for accurate estimations. Topographic slope corrections that can be integrated in the radargrammetric processing chain are important if for radargrammetry is to become a potential tool in forestry. The slope has a significant impact on the estimations already at average slopes >4° at stand level.
From the results, radargrammetry appears to be a potentially promising remote sensing technique for future forest applications.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}