A Comparison of Land Surface Water Mapping Using the Normalized Difference Water Index from TM, ETM+ and ALI

 ,
,  ,
,
Abstract
:1. Introduction
2. Study Area and Materials
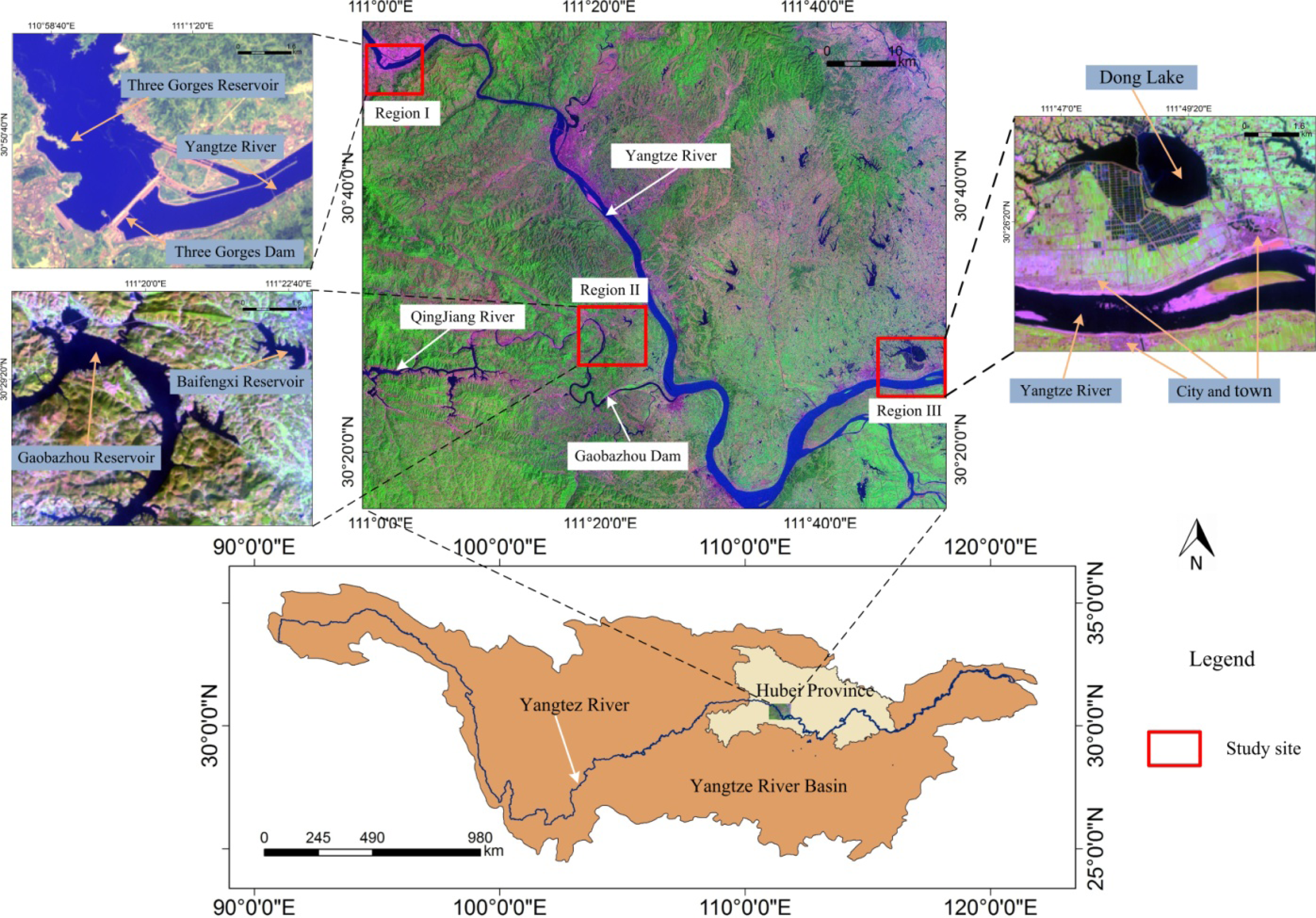
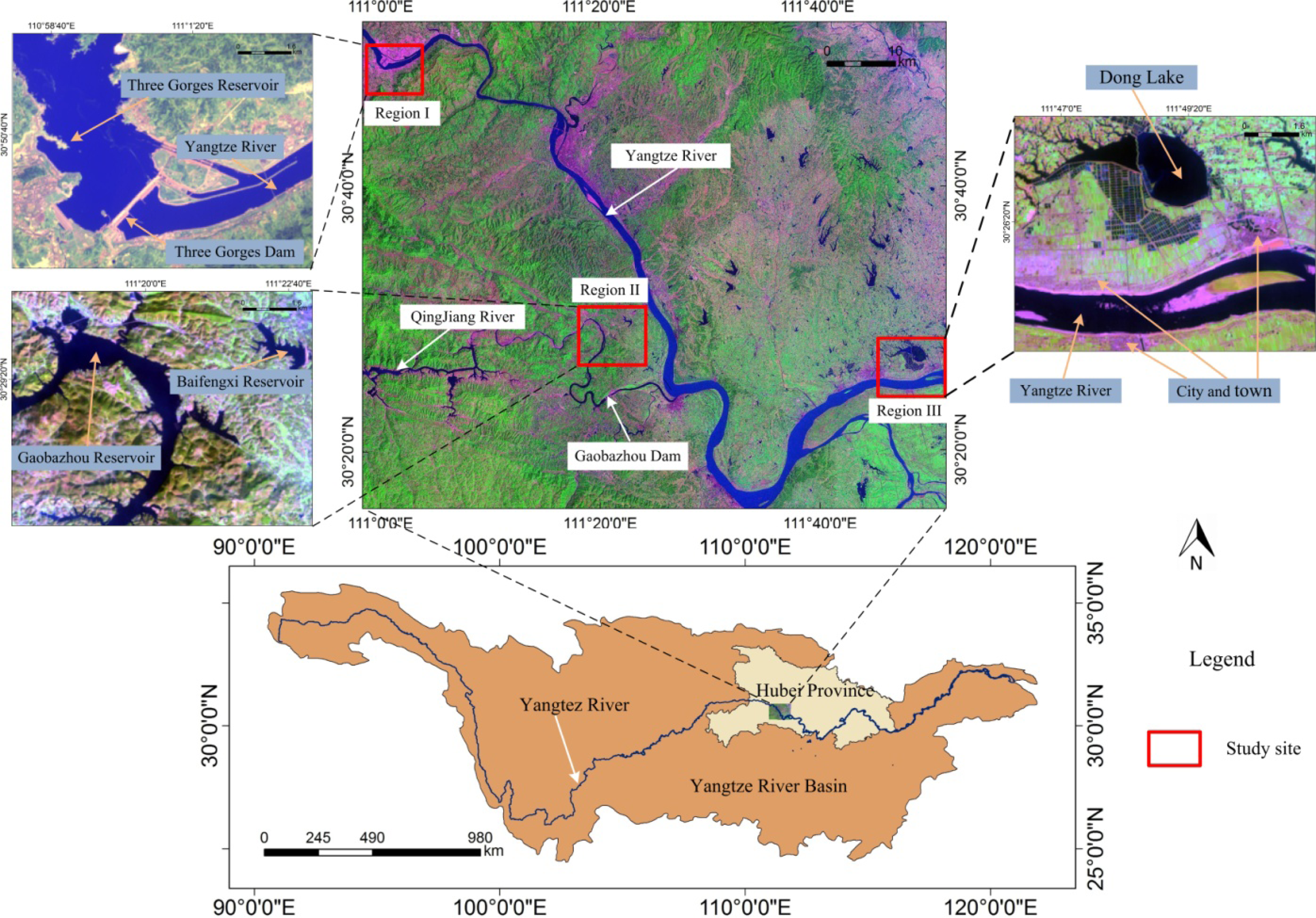
2.1. Study Area
2.2. Materials
3. Methodology
3.1. Data Pre-Processing
3.2. Spectral Water Index Methods
3.3. Image Threshold Segmentation
3.4. Validation of Land Surface Water Mapping
4. Results
5. Discussions
6. Conclusions
Acknowledgments
Conflicts of Interest
References
- Behera, M.D.; Chitale, V.S.; Shaw, A.; Roy, P.S.; Murthy, M.S.R. Wetland monitoring, serving as an index of land use change-a study in Samaspur Wetlands, Uttar Pradesh, India. J. Indian Soc. Remote Sens 2012, 40, 287–297. [Google Scholar]
- Bortels, L.; Chan, J.C.W.; Merken, R.; Koedam, N. Long-term monitoring of wetlands along the Western-Greek Bird Migration Route using Landsat and ASTER satellite images: Amvrakikos Gulf (Greece). J. Nat. Conserv 2011, 19, 215–223. [Google Scholar]
- Davranche, A.; Lefebvre, G.; Poulin, B. Wetland monitoring using classification trees and SPOT-5 seasonal time series. Remote Sens. Environ 2010, 114, 552–562. [Google Scholar] [Green Version]
- Schumann, G.J.P.; Neal, J.C.; Mason, D.C.; Bates, P.D. The accuracy of sequential aerial photography and SAR data for observing urban flood dynamics, a case study of the UK summer 2007 floods. Remote Sens. Environ 2011, 115, 2536–2546. [Google Scholar]
- Sheng, Y.; Gong, P.; Xiao, Q. Quantitative dynamic flood monitoring with NOAA AVHRR. Int. J. Remote Sens 2001, 22, 1709–1724. [Google Scholar]
- Zhang, J.; Zhou, C.; Xu, K.; Watanabea, M. Flood disaster monitoring and evaluation in China. Environ. Hazards 2002, 4, 33–43. [Google Scholar]
- Qi, H.; Altinakar, M.S. Simulation-based decision support system for flood damage assessment under uncertainty using remote sensing and census block information. Nat. Hazards 2011, 59, 1125–1143. [Google Scholar]
- Stephensa, E.M.; Batesa, P.D.; Freera, J.E.; Masonb, D.C. The impact of uncertainty in satellite data on the assessment of flood inundation models. J. Hydrol 2012, 414, 162–173. [Google Scholar]
- Wang, Q.; Watanabe, M.; Hayashi, S.; Murakami, S. Using NOAA AVHRR data to assess flood damage in China. Environ. Monit. Assess 2003, 82, 119–148. [Google Scholar]
- Kuenzer, C.; Guo, H.; Huth, J.; Leinenkugel, P.; Li, X.; Dech, S. Flood mapping and flood dynamics of the Mekong Delta: ENVISAT-ASAR-WSM based time series analyses. Remote Sens 2013, 5, 687–715. [Google Scholar]
- Du, Z.; Linghu, B.; Ling, F.; Li, W.; Tian, W.; Wang, H.; Gui, Y.; Sun, B.; Zhang, X. Estimating surface water area changes using time-series Landsat data in the Qingjiang River Basin, China. J. Appl. Remote Sens 2012, 6, 063609. [Google Scholar]
- Ling, F.; Cai, X.; Li, W.; Xiao, F.; Li, X.; Du, Y. Monitoring river discharge with remotely sensed imagery using river island area as an indicator. J. Appl. Remote Sens 2012, 6, 063564. [Google Scholar]
- Ma, M.; Wang, X.; Veroustraete, F.; Dong, L. Change in area of Ebinur Lake during the 1998–2005 period. Int. J. Remote Sens 2007, 28, 5523–5533. [Google Scholar]
- Muster, S.; Heim, B.; Abnizova, A.; Boike, J. Water body distributions across scales: a remote sensing based comparison of three arctic tundra wetlands. Remote Sens 2013, 5, 1498–1523. [Google Scholar]
- Ding, X.; Li, X. Monitoring of the water-area variations of Lake Dongting in China with ENVISAT ASAR images. Int. J. Appl. Earth Obs. Geoinf 2011, 13, 894–901. [Google Scholar]
- Giardino, C.; Bresciani, M.; Villa, P.; Martinelli, A. Application of remote sensing in water resource management: the case study of Lake Trasimeno, Italy. Water Resour. Manage 2010, 24, 3885–3899. [Google Scholar]
- Van Dijk, A.; Renzullo, L.J. Water resource monitoring systems and the role of satellite observations. Hydrol. Earth Syst. Sci 2011, 15, 39–55. [Google Scholar] [Green Version]
- Jain, S.K.; Saraf, A.K.; Goswami, A.; Ahmad, T. Flood inundation mapping using NOAA AVHRR data. Water Resour. Manage 2006, 20, 949–959. [Google Scholar]
- Huang, S.; Li, J.; Xu, M. Water surface variations monitoring and flood hazard analysis in Dongting Lake area using long-term Terra/MODIS data time series. Nat. Hazards 2012, 62, 93–100. [Google Scholar]
- Lu, S.; Wu, B.; Yan, N.; Wang, H. Water body mapping method with HJ-1A/B satellite imagery. Int. J. Appl. Earth Obs. Geoinf 2011, 13, 428–433. [Google Scholar]
- Campos, J.C.; Sillero, N.; Brito, J.C. Normalized difference water indexes have dissimilar performances in detecting seasonal and permanent water in the Sahara-Sahel transition zone. J. Hydrol 2012, 464, 438–446. [Google Scholar]
- Petropoulos, G.P.; Kontoes, C.C.; Keramitsoglou, I. Land cover mapping with emphasis to burnt area delineation using co-orbital ALI and Landsat TM imagery. Int. J. Appl. Earth Obs. Geoinf 2012, 18, 344–355. [Google Scholar]
- Elmore, A.J.; Mustard, J.F. Precision and accuracy of EO-1 Advanced Land Imager (ALI) data for semiarid vegetation studies. IEEE Trans. Geosci. Remote Sens 2003, 41, 1311–1320. [Google Scholar]
- Helmer, E.H.; Ruzycki, T.S.; Wunderle, J.M.; Vogesser, S.; Ruefenacht, B.; Kwit, C.; Brandeis, T.J.; Ewert, D.N. Mapping tropical dry forest height, foliage height profiles and disturbance type and age with a time series of cloud-cleared Landsat and ALI image mosaics to characterize avian habitat. Remote Sens. Environ 2010, 114, 2457–2473. [Google Scholar]
- Goodenough, D.G.; Dyk, A.; Niemann, K.O.; Pearlman, J.S.; Chen, H.; Han, T.; Murdoch, M.; West, C. Processing Hyperion and ALI for forest classification. IEEE Trans. Geosci. Remote Sens 2003, 41, 1321–1331. [Google Scholar]
- Chen, S.; Fang, L.; Zhang, L.; Huang, W. Remote sensing of turbidity in seawater intrusion reaches of Pearl River Estuary—A case study in Modaomen water way, China. Estuar. Coast. Shelf Sci 2009, 82, 119–127. [Google Scholar]
- Chander, G.; Meyer, D.J.; Helder, D.L. Cross calibration of the Landsat-7 ETM+ and EO-1 ALI sensor. IEEE Trans. Geosci. Remote Sens 2004, 42, 2821–2831. [Google Scholar]
- Thenkabail, P.S.; Enclona, E.A.; Ashton, M.S.; Legg, C.; Dieu, M.J. D. Hyperion, IKONOS, ALI and ETM+ sensors in the study of African rainforests. Remote Sens. Environ 2004, 90, 23–43. [Google Scholar]
- Soudani, K.; François, C.; Le Maire, G.; Le Dantec, V.; Dufrêne, E. Comparative analysis of IKONOS, SPOT, and ETM+ data for leaf area index estimation in temperate coniferous and deciduous forest stands. Remote Sens. Environ 2006, 102, 161–175. [Google Scholar] [Green Version]
- Amini, J. A method for generating floodplain maps using IKONOS images and DEMs. Int. J. Remote Sens 2010, 31, 2441–2456. [Google Scholar]
- Huang, C.; Davis, L.S.; Townshend, J.R.G. An assessment of support vector machines for land cover classification. Int. J. Remote Sens 2002, 23, 725–749. [Google Scholar]
- Mcfeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens 1996, 17, 1425–1432. [Google Scholar]
- Rundquist, D.C.; Lawson, M.P.; Queen, L.P.; Cerveny, R.S. The relationship between the timing of summer-season rainfall events and lake-surface area. J. Am. Water Resour. Assoc 1987, 23, 493–508. [Google Scholar]
- Xu, H. Modification of normalized difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens 2006, 27, 3025–3033. [Google Scholar]
- Abou El-Magd, I.; Tanton, T.W. Improvements in land use mapping for irrigated agriculture from satellite sensor data using a multi-stage maximum likelihood classification. Int. J. Remote Sens 2003, 24, 4197–4206. [Google Scholar]
- Qiao, C.; Luo, J.; Sheng, Y.; Shen, Z.; Zhu, Z.; Ming, D. An adaptive water extraction method from remote sensing image based on NDWI. J. Indian Soc. Remote Sens 2012, 40, 421–433. [Google Scholar]
- Ashish, D.; Mcclendon, R.W.; Hoogenboom, G. Land-use classification of multispectral aerial images using artificial neural networks. Int. J Remote Sens 2009, 30, 1989–2004. [Google Scholar]
- Ji, L.; Zhang, L.; Wylie, B. Analysis of dynamic thresholds for the normalized difference water index. Photogram. Eng. Remote Sens 2009, 75, 1307–1317. [Google Scholar]
- Jiang, Z.; Qi, J.; Su, S.; Zhang, Z.; Wu, J. Water body delineation using index composition and HIS transformation. Int. J. Remote Sens 2012, 33, 3402–3421. [Google Scholar]
- Ouma, Y.O.; Tateishi, R. A water index for rapid mapping of shoreline changes of five East African Rift Valley lakes: An empirical analysis using Landsat TM and ETM+ data. Int. J. Remote Sens 2006, 27, 3153–3181. [Google Scholar]
- Bai, J.; Chen, X.; Li, J.; Yang, L.; Fang, H. Changes in the area of inland lakes in arid regions of central Asia during the past 30 years. Environ. Monit. Assess 2011, 178, 247–256. [Google Scholar]
- Karsli, F.; Guneroglu, A.; Dihkan, M. Spatio-temporal shoreline changes along the southern Black Sea coastal zone. J. Appl. Remote Sens 2011, 5, 053545. [Google Scholar]
- Chander, G.; Markham, B.L.; Helde, D.L. Summary of current radiometric calibration coefficients for Landsat MSS, TM, ETM+, and EO-1 ALI sensors. Remote Sens. Environ 2009, 113, 893–903. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cyber 1979, 9, 62–69. [Google Scholar]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ 2002, 80, 185–201. [Google Scholar]
- Sun, F.; Sun, W.; Chen, J.; Gong, P. Comparison and improvement of methods for identifying waterbodies in remotely sensed imagery. In. J. Remote Sens 2012, 33, 6854–6875. [Google Scholar]
- Keshava, N.; Mustard, J.F. Spectral unmixing. IEEE Signal Process. Mag 2002, 19, 44–57. [Google Scholar]
- Pu, R.; Gong, P.; Yu, Q. Comparative analysis of EO-1 ALI and Hyperion, and Landsat ETM+ data for mapping forest crown closure and leaf area index. Sensors 2008, 8, 3744–3766. [Google Scholar]
- Irons, J.R.; Masek, J.G. Requirements for a Landsat data continuity mission. Photogram. Eng. Remote Sens 2006, 72, 1102–1108. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Sensor | Path/Row | Acquisition Date | Resolution (m) | File Format | Producer | Wavelength (μm) |
|---|---|---|---|---|---|---|---|
| Landsat-5 | TM | 125/39 | 2005-09-09 2010-05-02 | 30 | GeoTiff | USGS | Band1(Blue): 0.450–0.520 |
| Band2 (Green): 0.520–0.600 | |||||||
| Band3 (Red): 0.630–0.690 | |||||||
| Band4 (NIR): 0.760–0.900 | |||||||
| Band5 (SWIR): 1.550–1.750 | |||||||
| 120 | GeoTiff | USGS | Band6 (TIR): 10.400–12.500 | ||||
| 30 | GeoTiff | USGS | Band7 (SWIR): 2.080–2.350 | ||||
| Landsat-7 | ETM+ | 124/39 | 2003-03-29 | 30 | GeoTiff | USGS | Band1(Blue): 0.450–0.515 |
| Band2 (Green): 0.525–0.605 | |||||||
| Band3 (Red): 0.630–0.690 | |||||||
| Band4 (NIR): 0.750–0.900 | |||||||
| Band5 (SWIR): 1.550–1.750 | |||||||
| 60 | GeoTiff | USGS | Band6 (TIR): 10.400–12.500 | ||||
| 30 | GeoTiff | USGS | Band7 (SWIR): 2.090–2.350 | ||||
| 15 | GeoTiff | USGS | Band8 (PAN): 0.520–0.900 | ||||
| EO-1 | ALI | 124/39 125/39 125/38 | 2003-03-29 2005-10-21 2010-09-03 | 10 | GeoTiff | USGS | Band1(PAN): 0.480–0.690 |
| 30 | GeoTiff | USGS | Band2(Blue): 0.433–0.453 | ||||
| Band3 (Blue): 0.450–0.515 | |||||||
| Band4 (Green): 0.525–0.605 | |||||||
| Band5 (Red): 0.630–0.690 | |||||||
| Band6 (NIR): 0.775–0.805 | |||||||
| Band7 (NIR):0.845–0.890 | |||||||
| Band8 (SWIR): 1.200–1.300 | |||||||
| Band9 (SWIR): 1.550–1.750 | |||||||
| Band10 (SWIR): 2.080–2.350 | |||||||
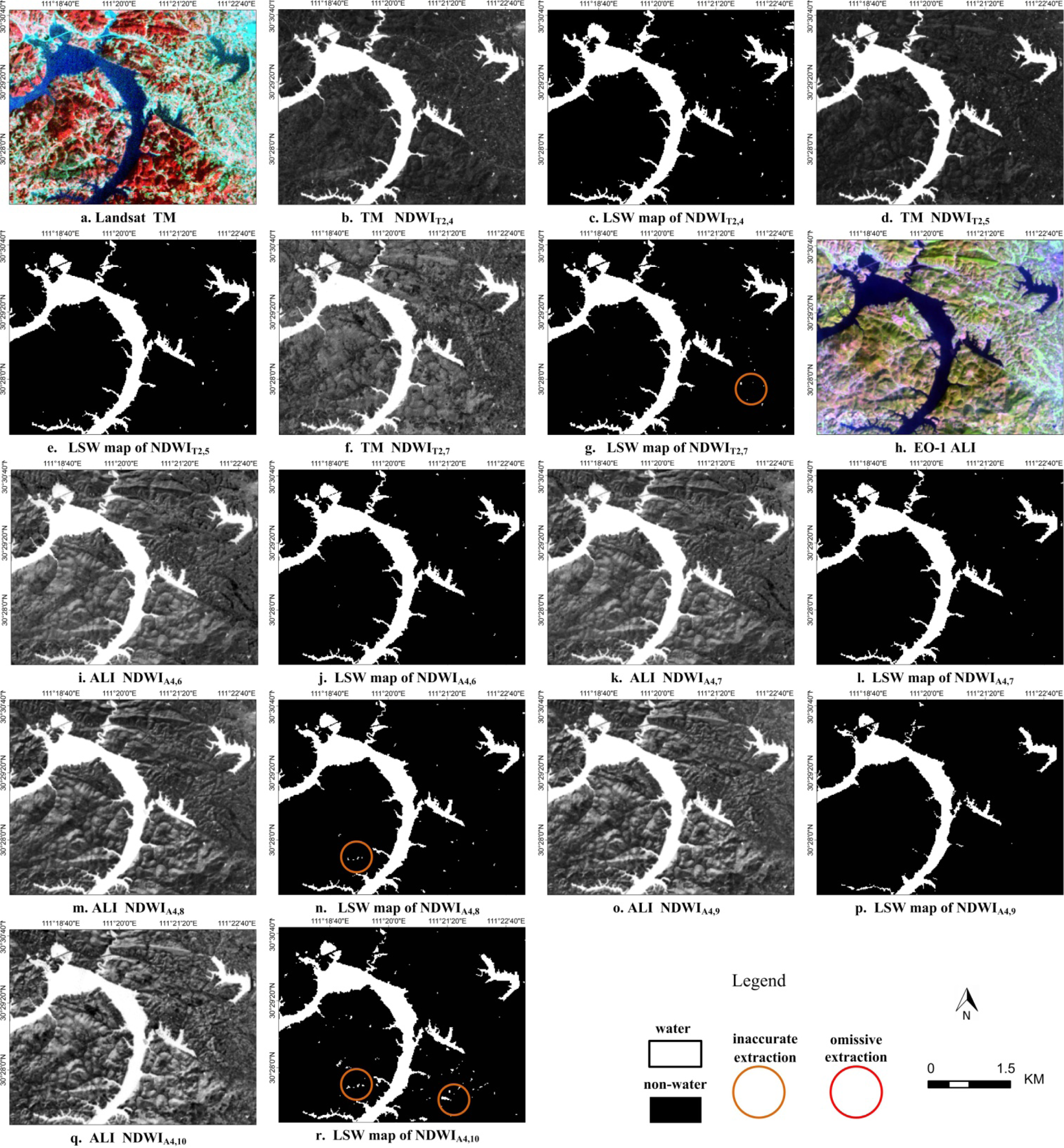
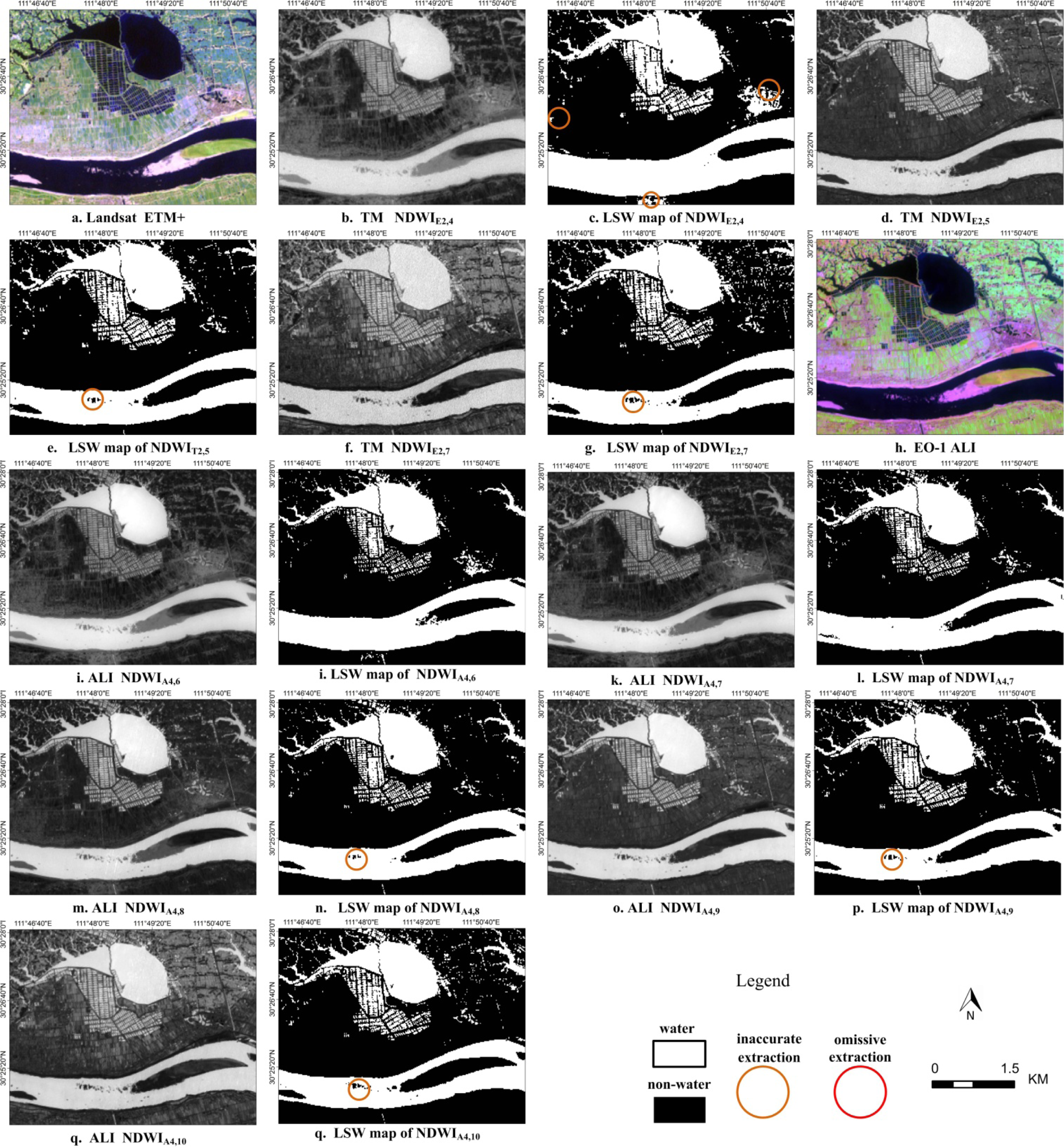
| Sensor | NDWI Equation | Symbol and Notation |
|---|---|---|
| TM | NDWIT2,4 is the McFeeters’s NDWI for the TM sensor; NDWIT2,5 and NDWIT2,7 are the Xu’s NDWIs for the TM sensor; BT2, BT4, BT5 and BT7 are Bands 2, 4, 5, and 7 of the TM sensor, respectively. | |
| ETM+ | NDWIE2,4 is the McFeeters’s NDWI for the ETM+ sensor; NDWIE2,5 and NDWIE2,7 are the Xu’s NDWIs for the ETM+ sensor; BE2, BE4, BE5 and BE7 are Bands 2, 4, 5, and 7 of the ETM+ sensor, respectively. | |
| ALI | NDWIA4,6 and NDWIA4,7 are the McFeeters’s NDWIs for the ALI sensor; NDWIA4,8, NDWIA4,9 and NDWIA4,10 are the Xu’s NDWIs for the ALI sensor; BA4, BA6, BA7, BA8, BA9, and BA10 are Bands 4, 6, 7, 8, 9, and 10 of the ALI sensor, respectively. | |
| Place | Sensor | Acquisition Date | NDWI | Threshold | BCV | CV | OA (%) | Kappa | LSW Area (km2) |
|---|---|---|---|---|---|---|---|---|---|
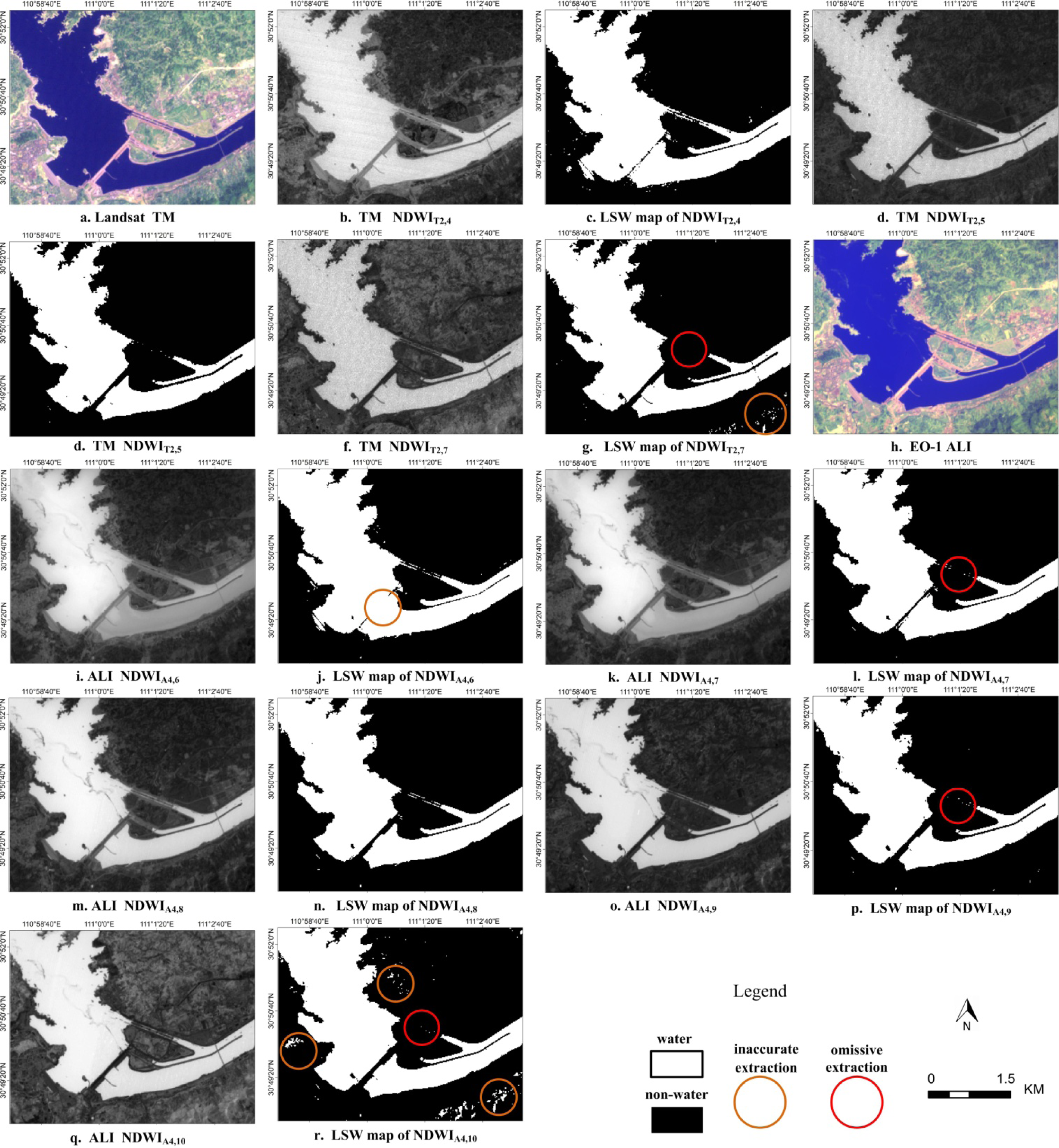
| Region I | TM | 2010-05-02 | NDWIT2,4 | −0.052 | 0.047 | 0.456 | 93.19 | 0.8440 | 22.89 |
| NDWIT2,5 | −0.013 | 0.083 | 0.618 | 96.33 | 0.9133 | 20.85 | |||
| NDWIT2,7 | 0.243 | 0.057 | 0.515 | 95.47 | 0.8939 | 20.77 | |||
| ALI | 2010-09-30 | NDWIA4,6 | −0.294 | 0.026 | 0.341 | 94.23 | 0.8673 | 22.43 | |
| NDWIA4,7 | −0.265 | 0.043 | 0.438 | 95.54 | 0.8962 | 21.57 | |||
| NDWIA4,8 | 0.166 | 0.090 | 0.638 | 95.89 | 0.9040 | 21.33 | |||
| NDWIA4,9 | 0.134 | 0.111 | 0.713 | 96.76 | 0.9235 | 20.73 | |||
| NDWIA4,10 | 0.289 | 0.078 | 0.592 | 95.86 | 0.9034 | 21.34 | |||
| Region II | TM | 2005-09-09 | NDWIT2,4 | −0.093 | 0.031 | 0.522 | 95.18 | 0.7819 | 9.61 |
| NDWIT2,5 | 0.054 | 0.071 | 0.768 | 95.94 | 0.8097 | 9.00 | |||
| NDWIT2,7 | 0.406 | 0.036 | 0.531 | 95.43 | 0.7902 | 9.37 | |||
| ALI | 2005-10-21 | NDWIA4,6 | −0.201 | 0.005 | 0.197 | 96.19 | 0.8231 | 9.16 | |
| NDWIA4,7 | −0.173 | 0.008 | 0.240 | 96.49 | 0.8349 | 8.90 | |||
| NDWIA4,8 | 0.214 | 0.015 | 0.302 | 96.56 | 0.8372 | 8.84 | |||
| NDWIA4,9 | 0.243 | 0.018 | 0.325 | 97.73 | 0.8818 | 7.25 | |||
| NDWIA4,10 | 0.295 | 0.013 | 0.245 | 96.53 | 0.8337 | 8.61 | |||
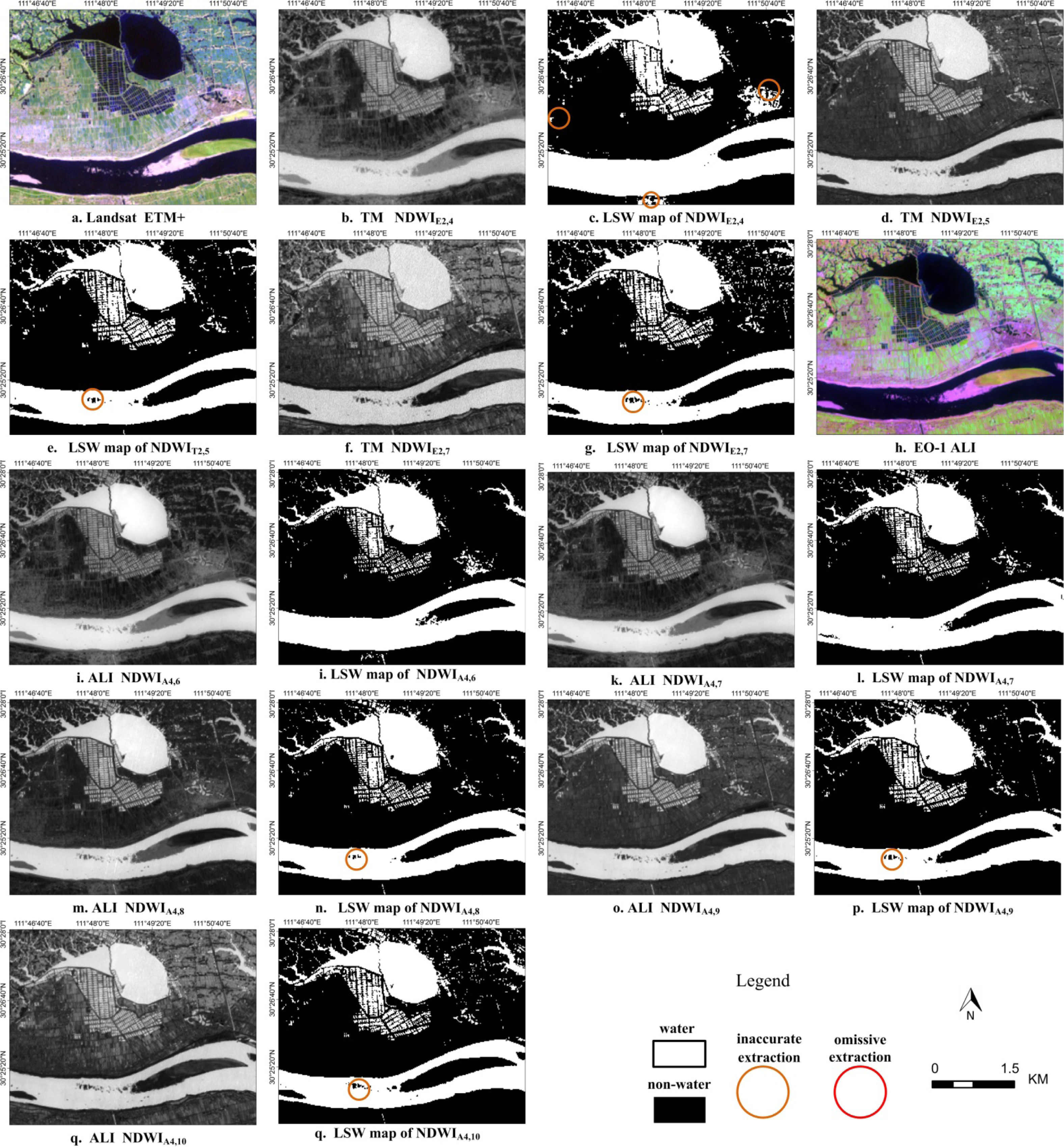
| Region III | ETM+ | 2003-03-29 | NDWIE2,4 | 0.242 | 0.019 | 0.288 | 87.72 | 0.7050 | 22.21 |
| NDWIE2,5 | 0.256 | 0.030 | 0.378 | 91.60 | 0.7862 | 19.36 | |||
| NDWIE2,7 | 0.410 | 0.023 | 0.315 | 90.80 | 0.7671 | 19.60 | |||
| ALI | 2003-03-29 | NDWIA4,6 | −0.331 | 0.018 | 0.294 | 91.33 | 0.7752 | 19.53 | |
| NDWIA4,7 | −0.313 | 0.023 | 0.334 | 92.36 | 0.8042 | 19.03 | |||
| NDWIA4,8 | 0.122 | 0.033 | 0.393 | 93.62 | 0.8348 | 18.54 | |||
| NDWIA4,9 | 0.035 | 0.040 | 0.416 | 93.88 | 0.8432 | 19.03 | |||
| NDWIA4,10 | 0.188 | 0.031 | 0.367 | 93.12 | 0.8241 | 19.11 | |||
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Li, W.; Du, Z.; Ling, F.; Zhou, D.; Wang, H.; Gui, Y.; Sun, B.; Zhang, X. A Comparison of Land Surface Water Mapping Using the Normalized Difference Water Index from TM, ETM+ and ALI. Remote Sens. 2013, 5, 5530-5549. https://doi.org/10.3390/rs5115530
Li W, Du Z, Ling F, Zhou D, Wang H, Gui Y, Sun B, Zhang X. A Comparison of Land Surface Water Mapping Using the Normalized Difference Water Index from TM, ETM+ and ALI. Remote Sensing. 2013; 5(11):5530-5549. https://doi.org/10.3390/rs5115530
Chicago/Turabian StyleLi, Wenbo, Zhiqiang Du, Feng Ling, Dongbo Zhou, Hailei Wang, Yuanmiao Gui, Bingyu Sun, and Xiaoming Zhang. 2013. "A Comparison of Land Surface Water Mapping Using the Normalized Difference Water Index from TM, ETM+ and ALI" Remote Sensing 5, no. 11: 5530-5549. https://doi.org/10.3390/rs5115530