Forest Roads Mapped Using LiDAR in Steep Forested Terrain

Abstract
:1. Introduction
2. Light Detection and Ranging
2.1. LiDAR Introduction
2.2. Mapping Forest Roads Using LiDAR
3. Study Approach
3.1. Study Objectives
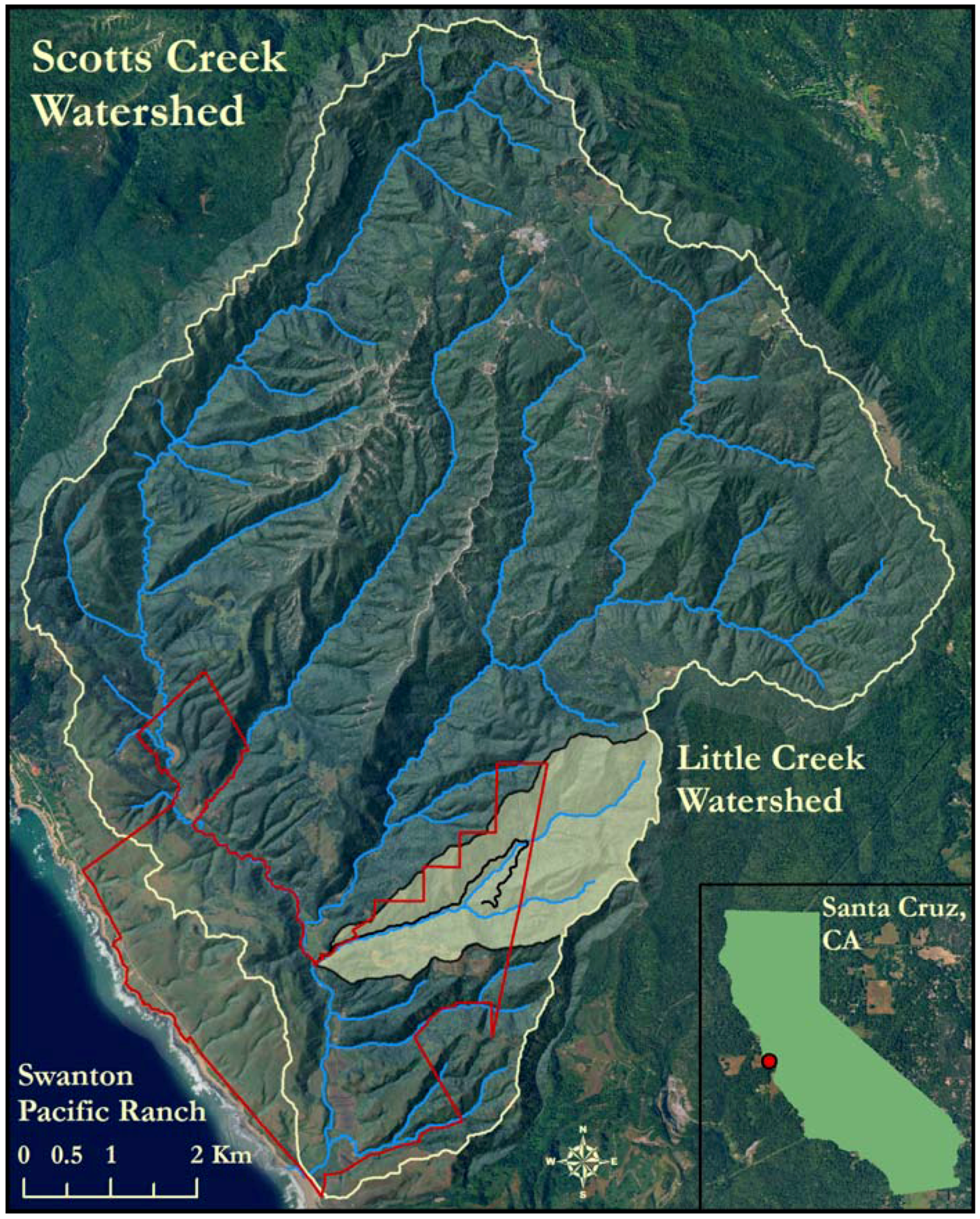
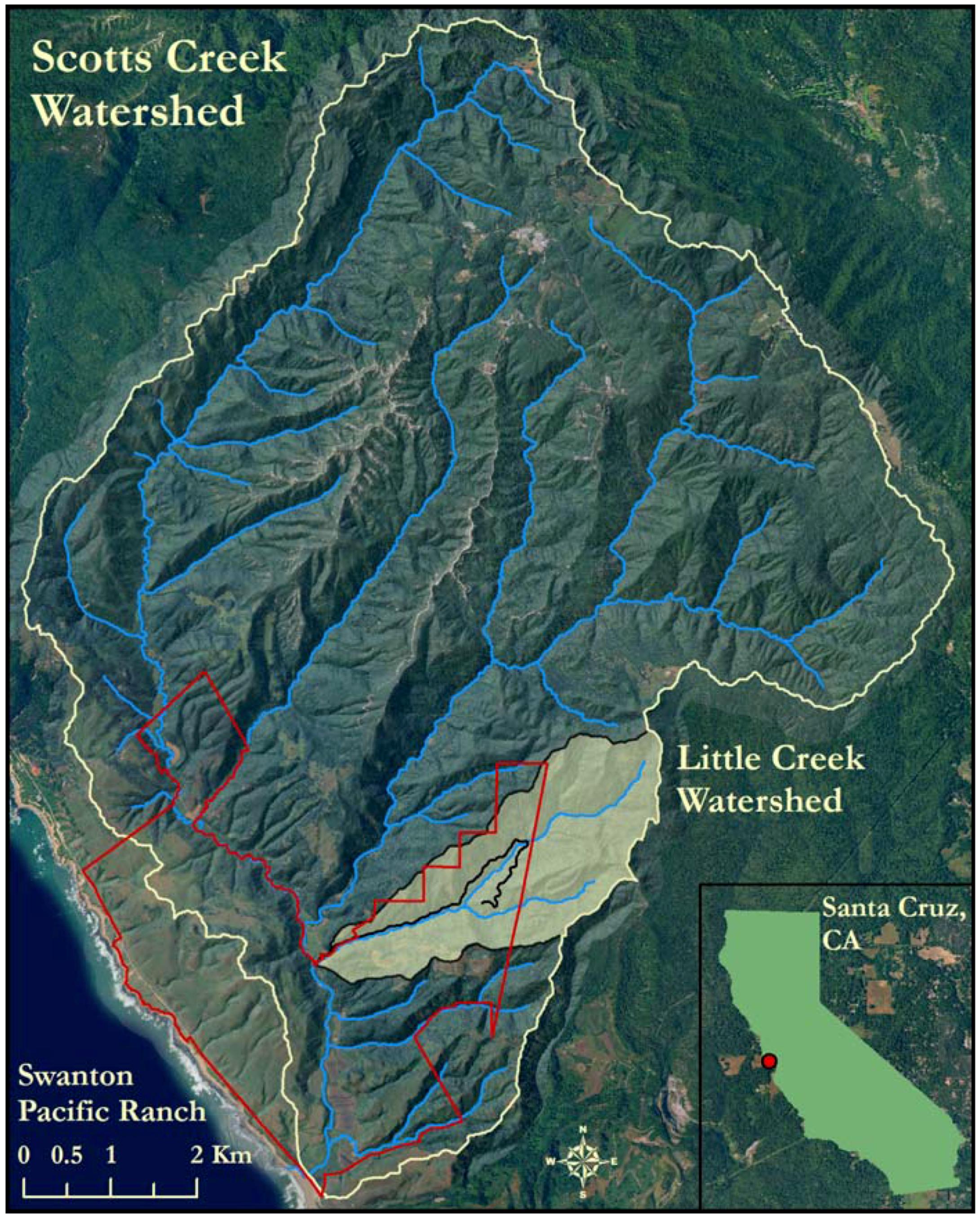
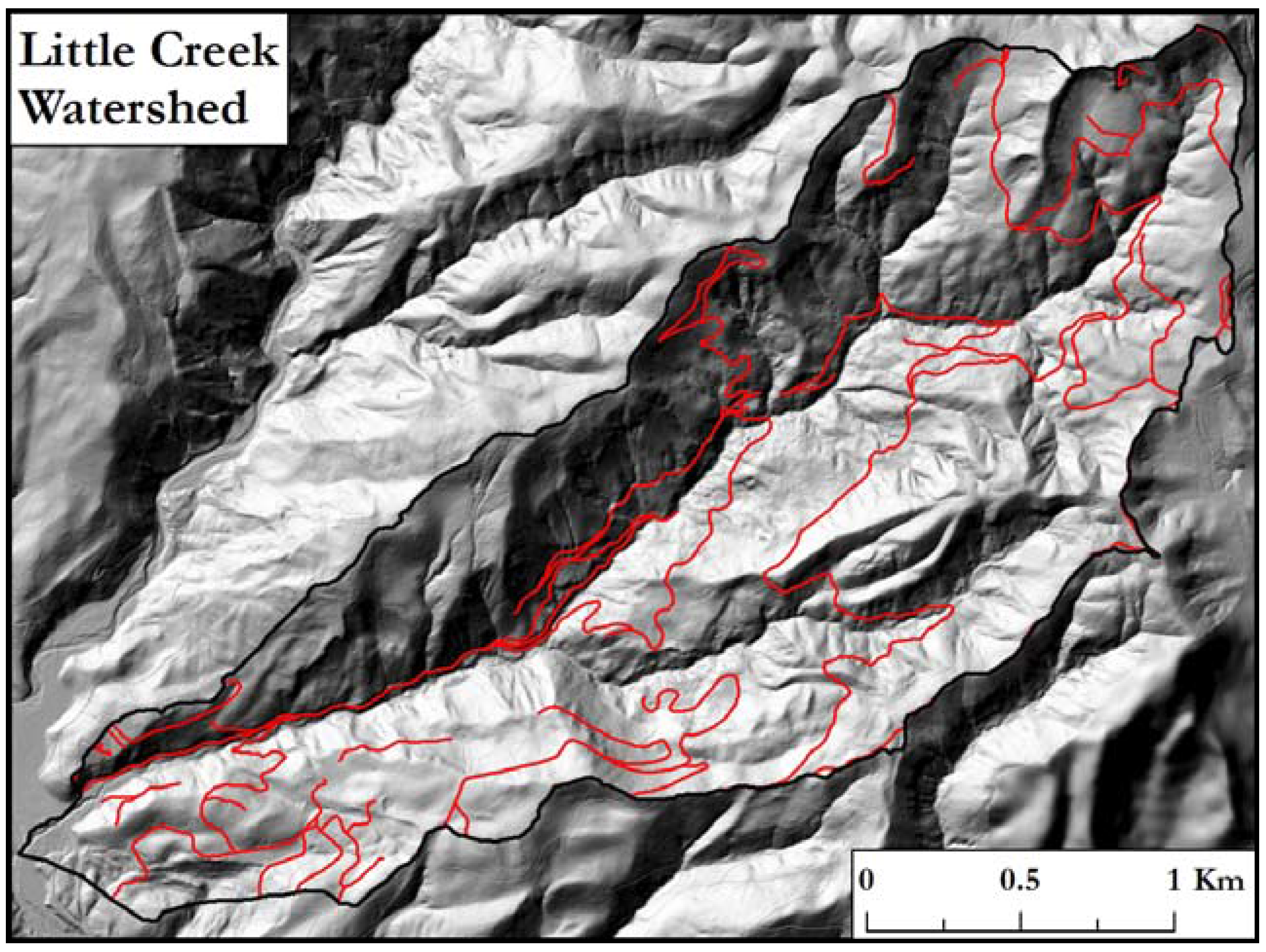
3.2. Study Area
3.3. Target Road Feature

4. Methods
4.1. Field Survey Methods
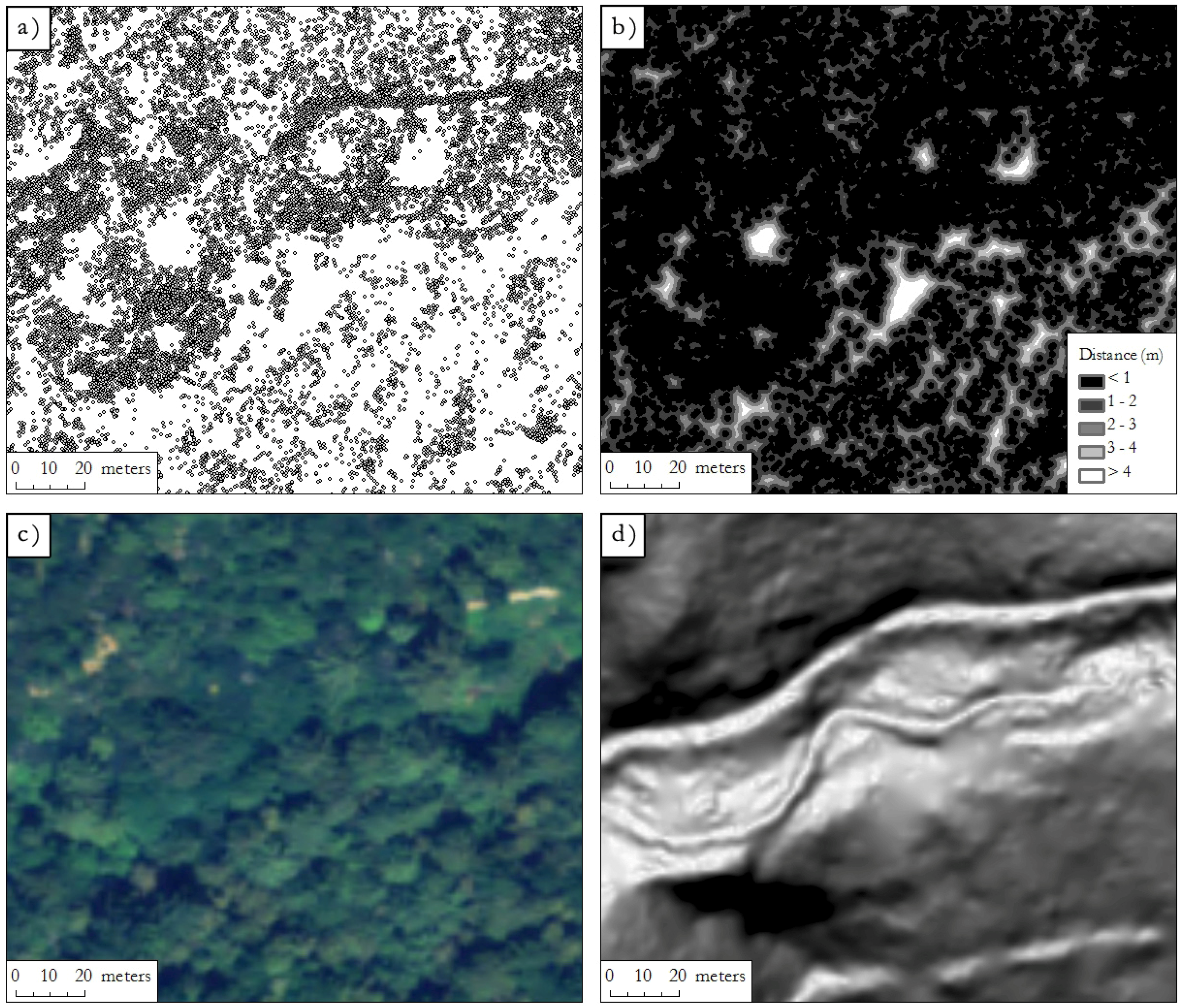
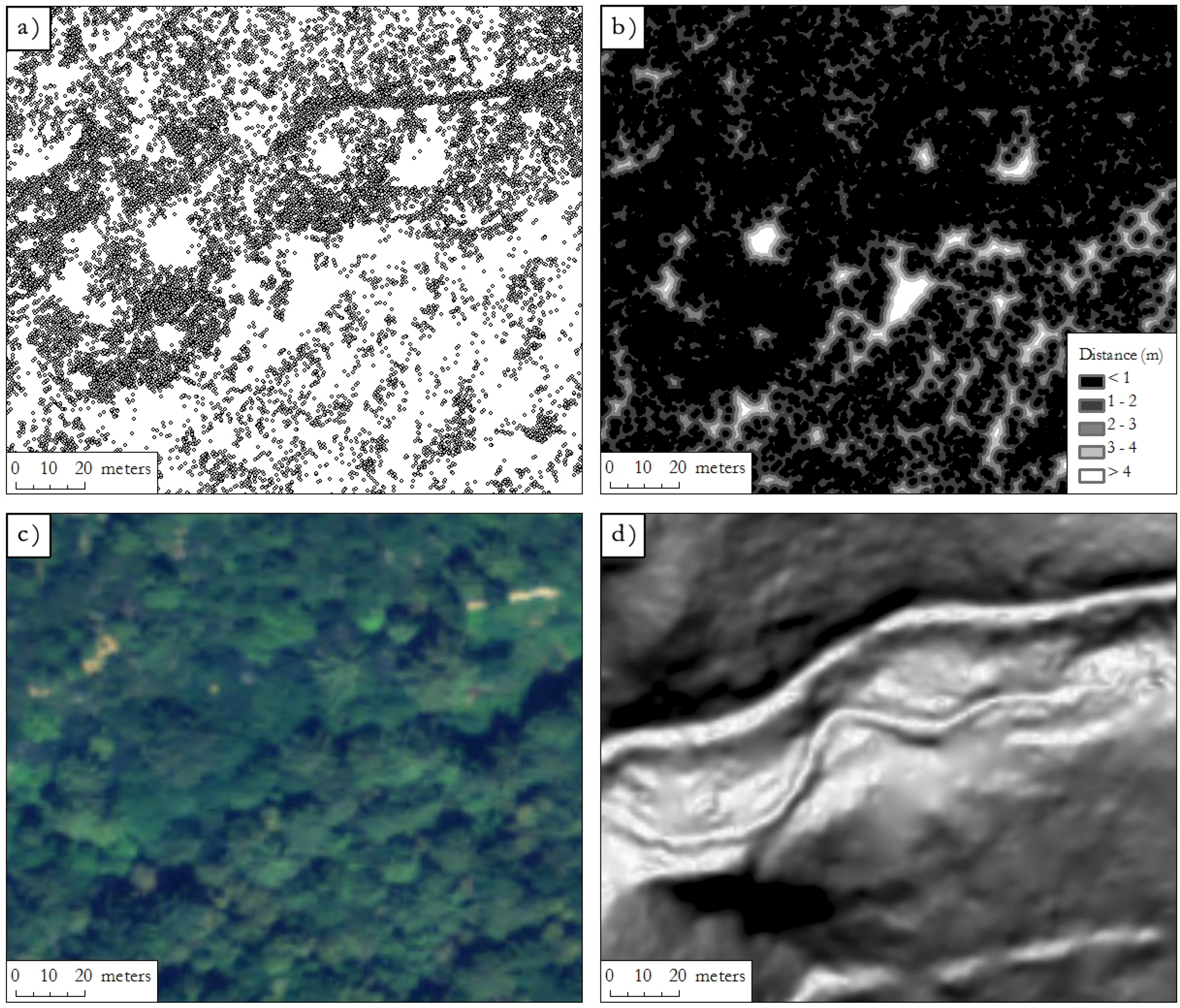
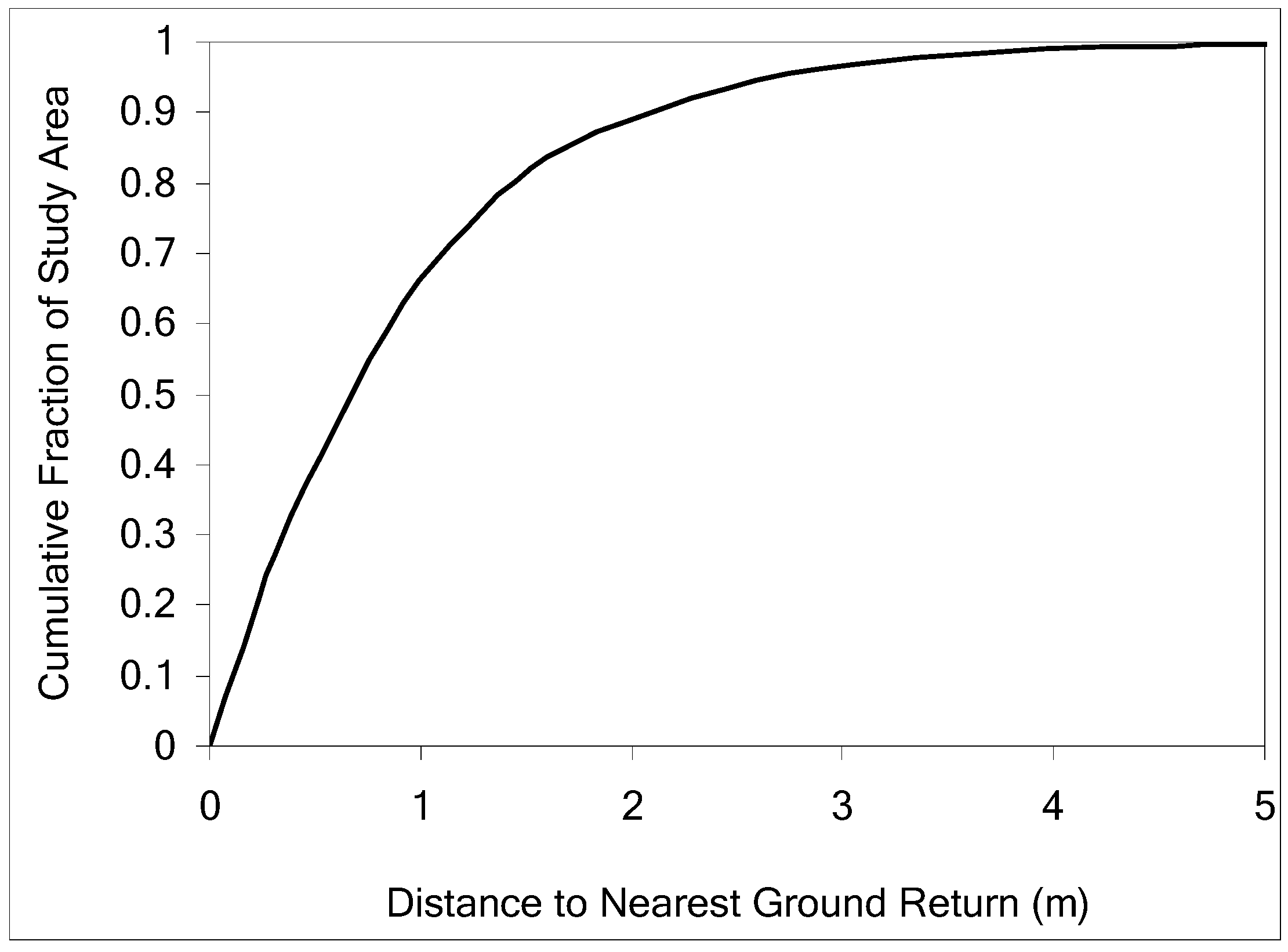
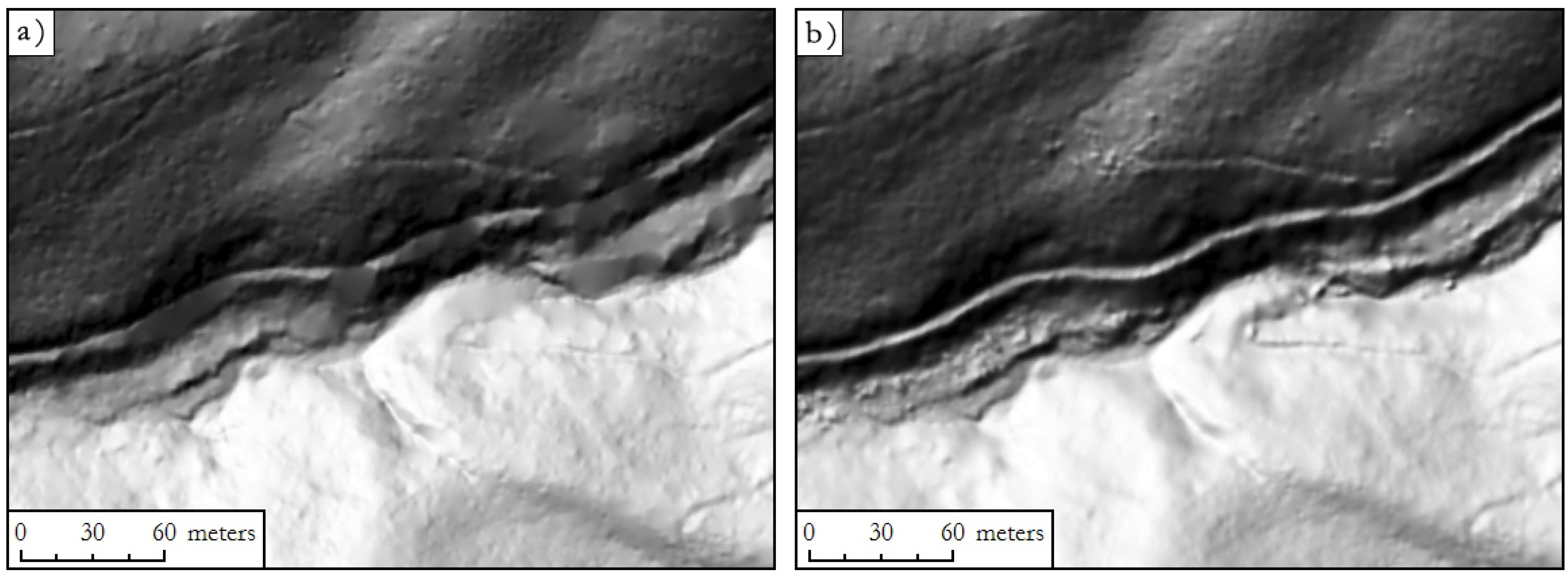
4.2. LiDAR Data Collection and Processing

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LiDAR Survey Parameters | |
| Altitude (m AGL) | 850 |
| Beam divergence (mrad) | 0.23 |
| Scan angle (º) | 14 |
| Scan width (m) | 425 |
| Swath overlap (%) | 50 |
| Pulse rate (kHz) | 100 |
| Sampling density (pulses/m2) | 6 |
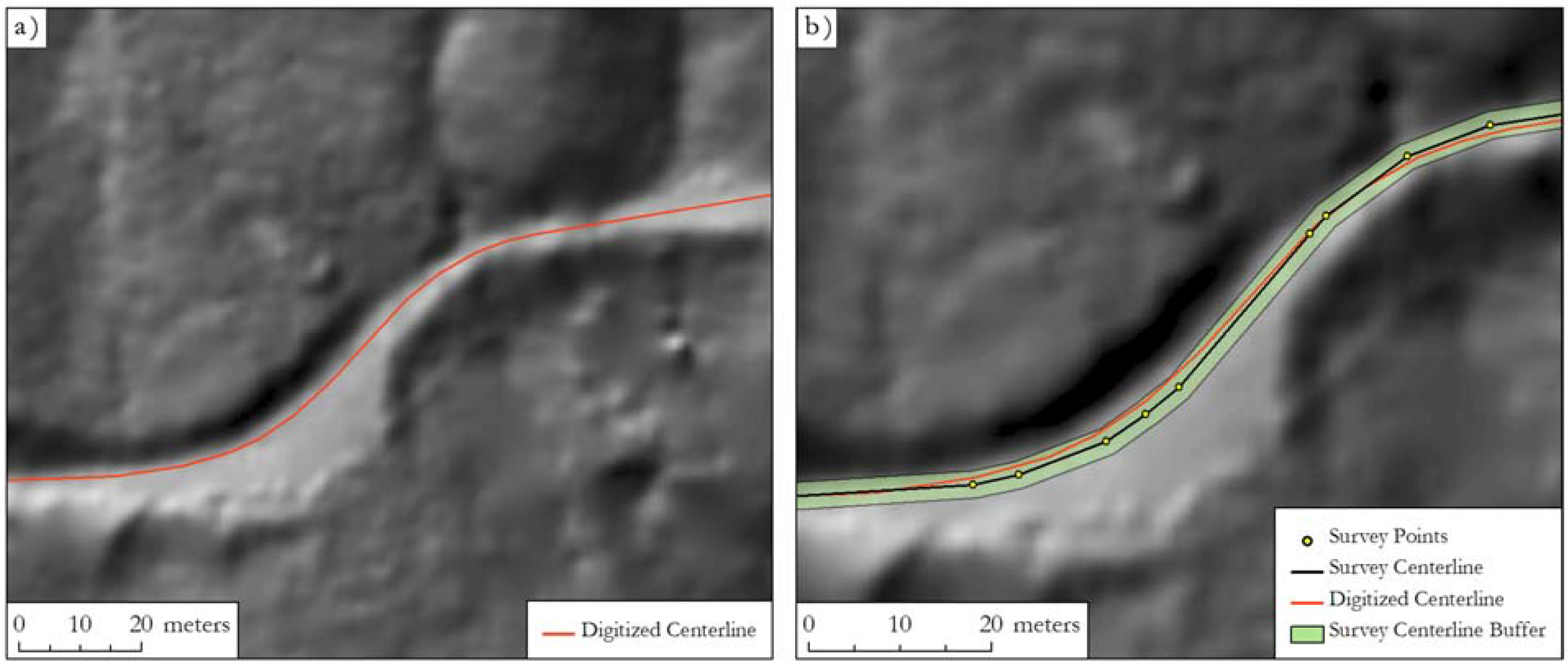
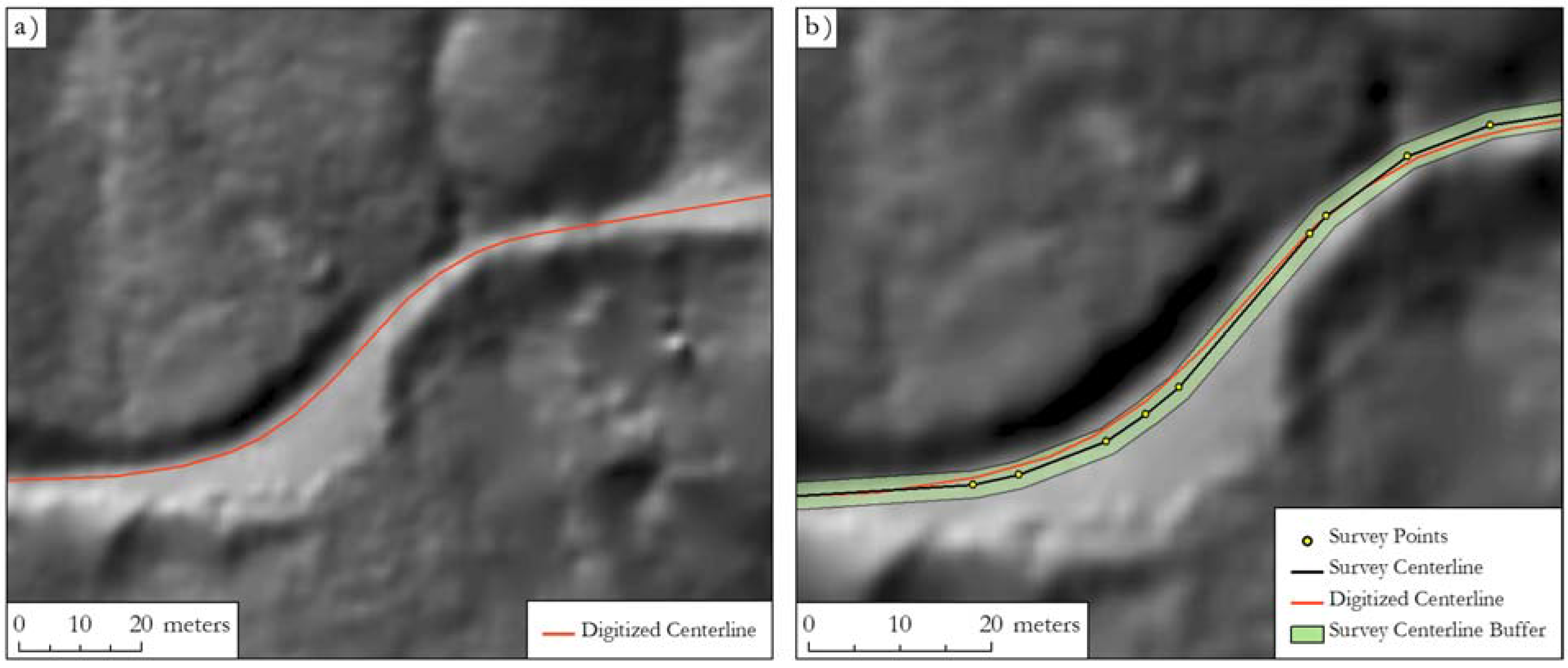
4.3. Road Feature Digitizing
4.4. Analysis Methods
5. Results
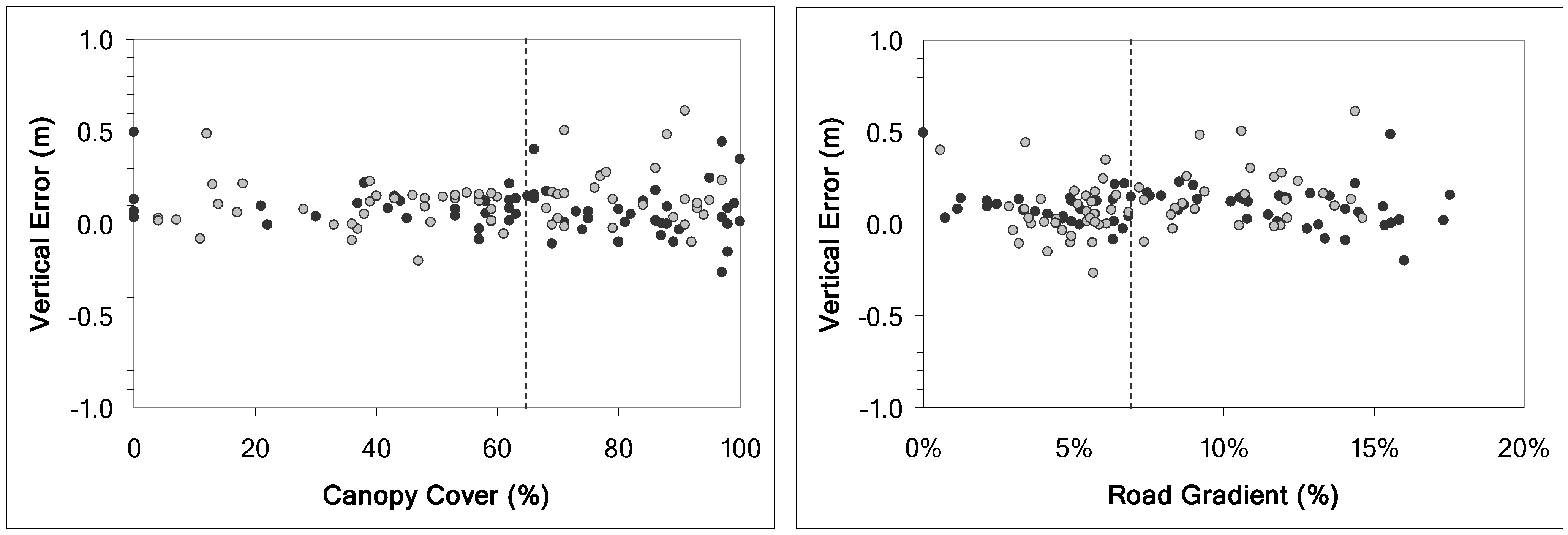
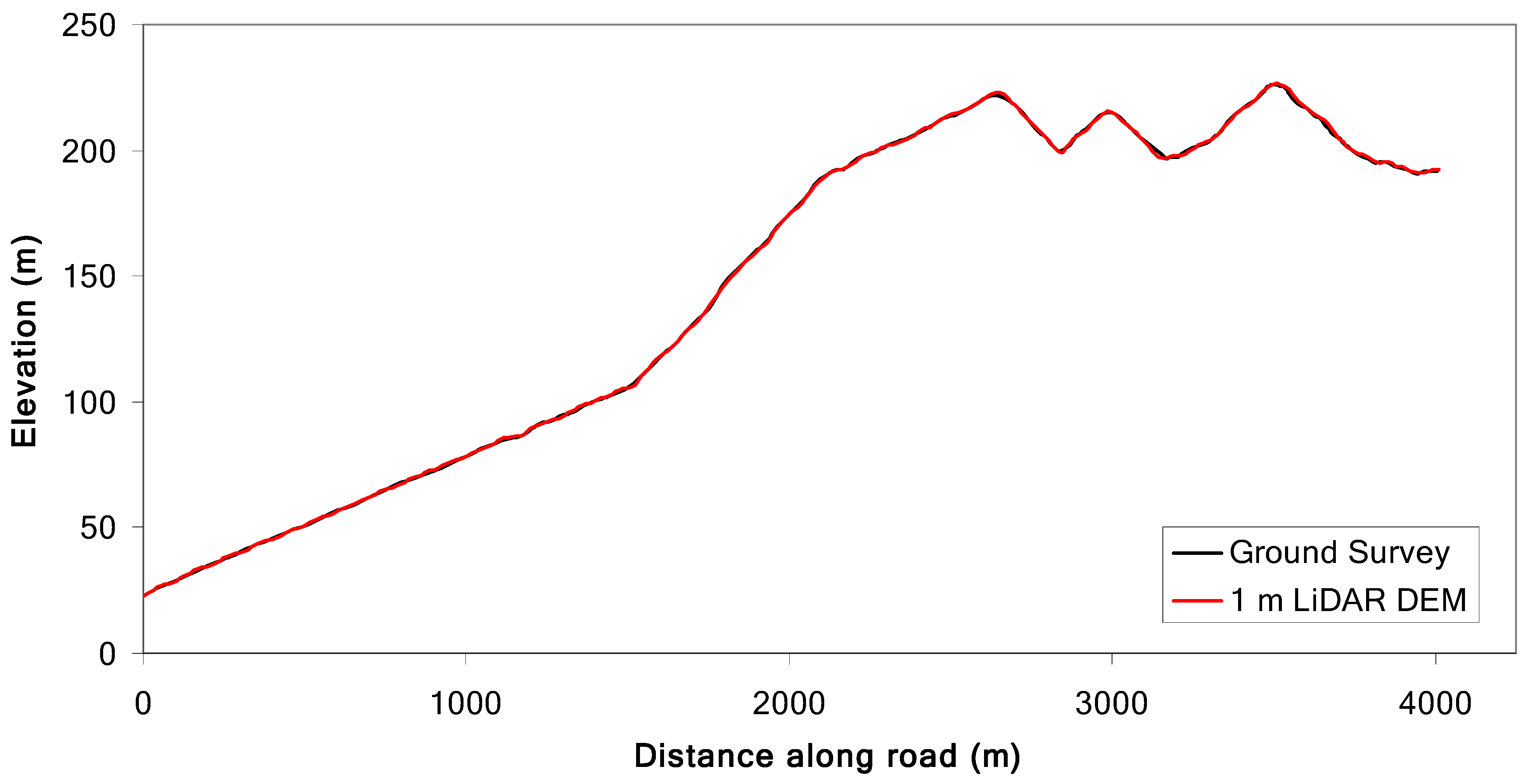
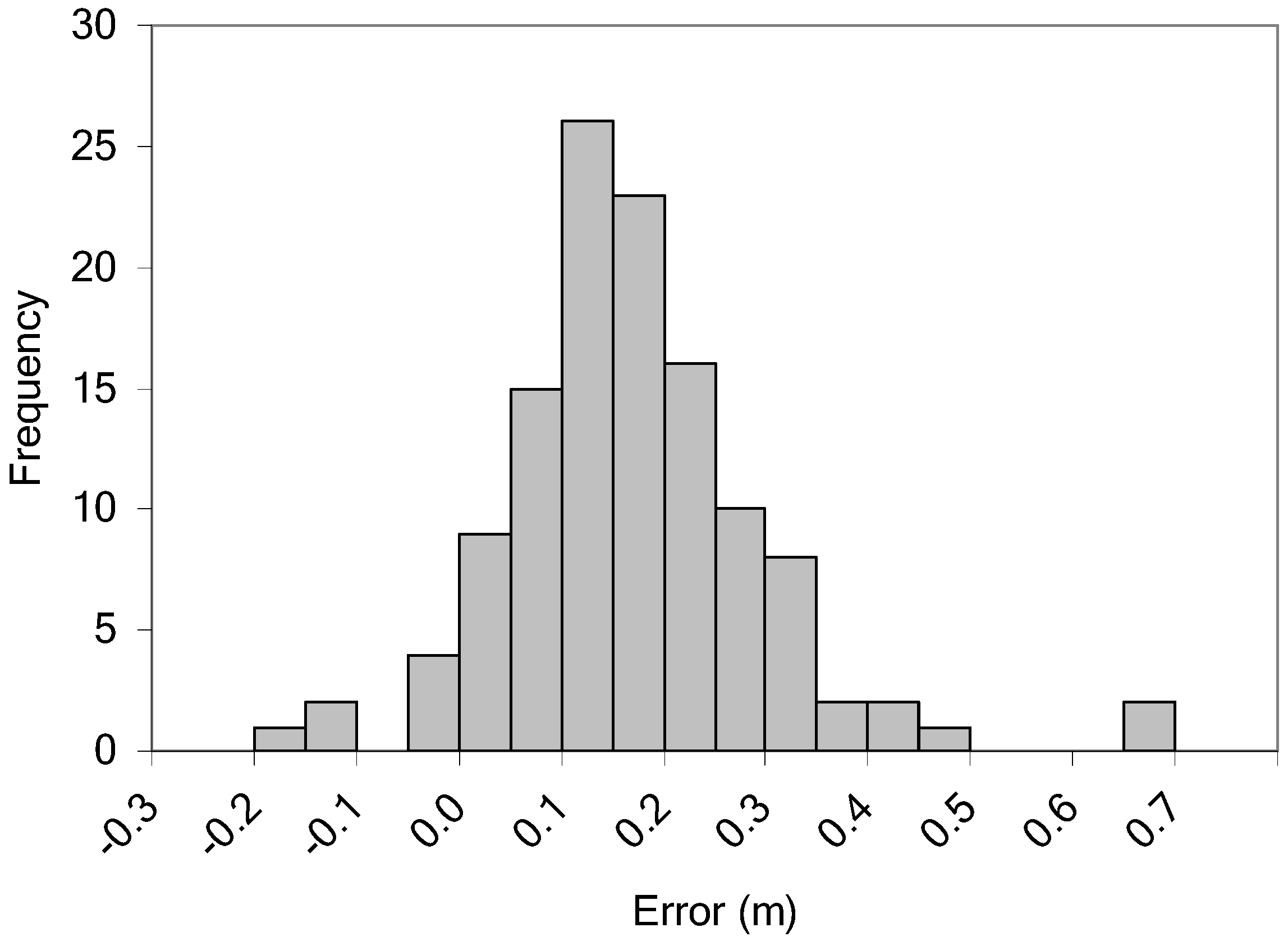
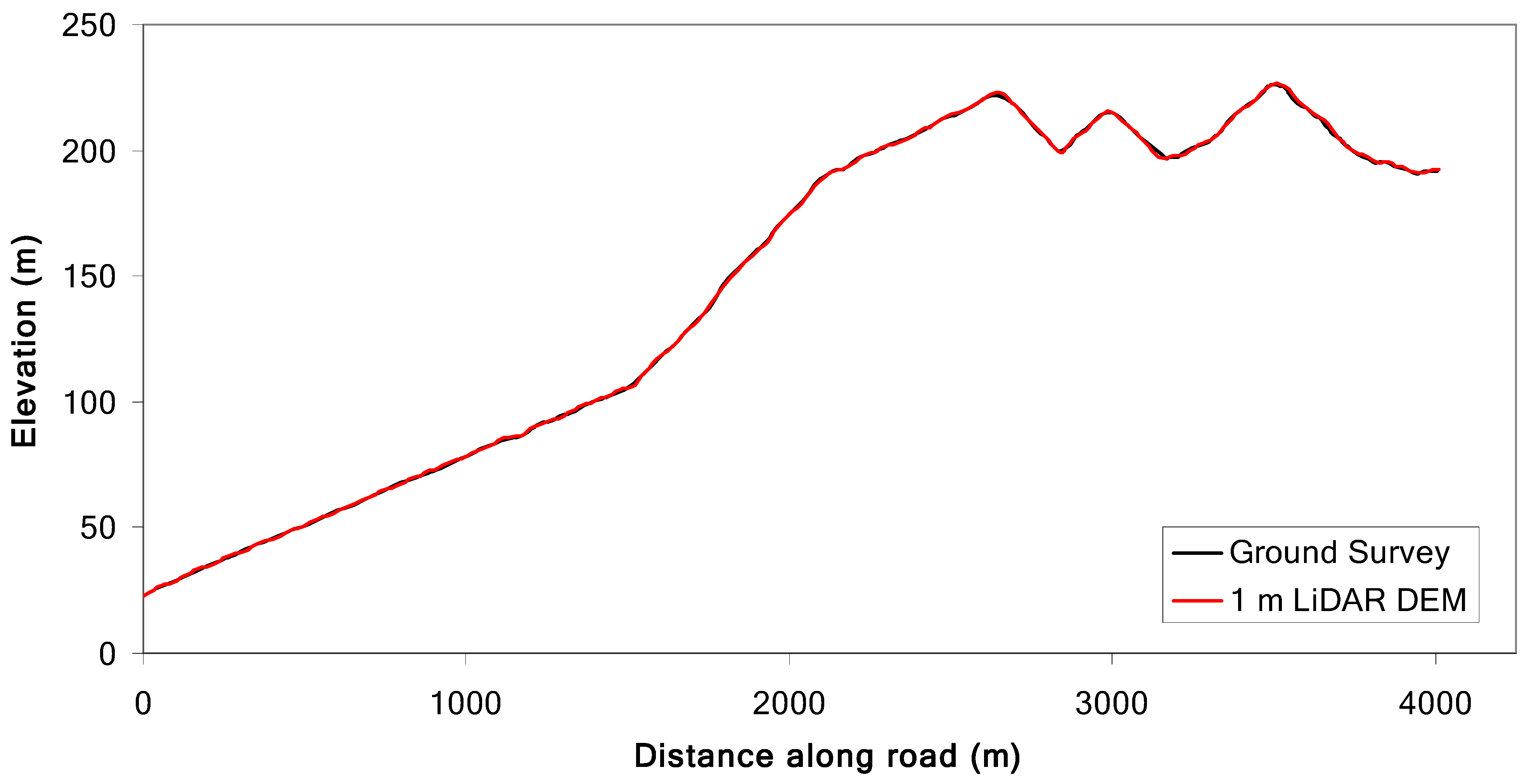
5.1. LiDAR DEM Accuracy
| Low Cover | High Cover | Overall | |
| Low Slope | 28 | 35 | 63 |
| High Slope | 36 | 27 | 63 |
| Overall | 64 | 62 | 126 |
| Low Cover | High Cover | Overall | ||||||
| Mean | SD | Mean | SD | Mean | SD | |||
| Low Slope | 0.10 | 0.10 | 0.06 | 0.15 | 0.08 | 0.13 | ||
| High Slope | 0.09 | 0.12 | 0.16 | 0.17 | 0.12 | 0.15 | ||
| Overall | 0.09 | 0.11 | 0.11 | 0.16 | 0.10 | 0.14 | ||

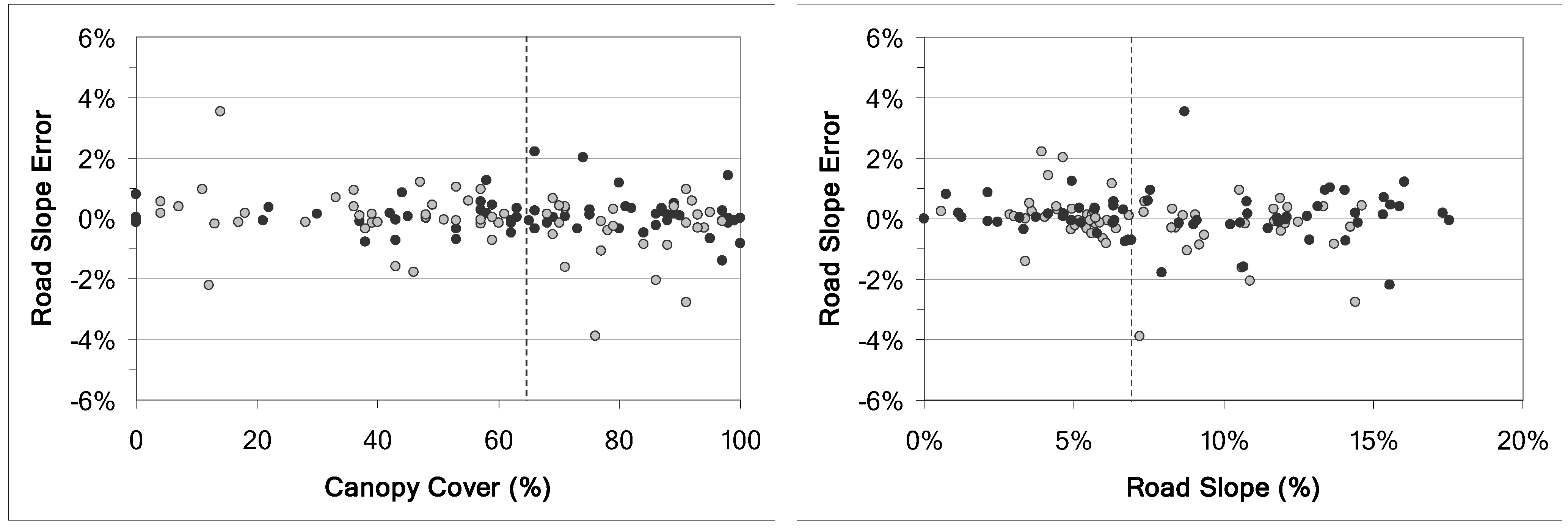
5.2. LiDAR-Derived Feature Accuracy

| Low Cover | High Cover | Overall | ||||||
| Mean | SD | Mean | SD | Mean | SD | |||
| Low Slope | 0.07 | 0.47 | 0.12 | 0.94 | 0.11 | 0.16 | ||
| High Slope | 0.15 | 0.69 | −0.40 | 1.09 | −0.11 | 1.03 | ||
| Overall | 0.10 | 0.77 | −0.09 | 0.92 | 0.00 | 0.09 | ||

6. Discussion
7. Conclusion
Acknowledgements
References and Notes
- Montgomery, D.R. Road surface drainage, channel initiation, and slope instability. Water Resour. Res. 1994, 30, 1925–1932. [Google Scholar] [CrossRef]
- Luce, C.H.; Black, T.A. Sediment production from forest roads in western Oregon. Water Resour. Res. 1999, 35, 2561–2570. [Google Scholar] [CrossRef]
- Bilby, R.E.; Sullivan, K.; Duncan, S.H. The generation and fate of road-surface sediment in forested watersheds in Southwestern Washington. Forest Sci. 1989, 35, 453–468. [Google Scholar]
- Frissell, C.A. Topology of extinction and endangerment of native fishes in the Pacific Northwest and California (USA). Conserv. Biol. 1993, 7, 342–354. [Google Scholar] [CrossRef]
- USDA Forest Service. Roads Analysis: Informing Decisions about Managing the National Forest Transportation System; USDA Forest Service: Washington, DC, USA, 1999.
- CDF. California Forest Practice Rules; California Department of Forestry and Fire Protection: Sacramento, CA, USA, 2009.
- Jones, J.A.; Swanson, F.J.; Wemple, B.C.; Snyder, K.U. Effects of roads on hydrology, geomorphology, and disturbance patches in stream networks. Conserv. Biol. 1999, 14, 76–85. [Google Scholar] [CrossRef]
- McGurk, B.J.; Fong, D.R. Equivalent roaded area as a measure of cumulative effect of logging. Environmen. Manage. 1995, 19, 609–621. [Google Scholar]
- Dubé, K.V.; Megahan, W.F.; McCalmon, M. Washington Road Surface Erosion Model; Washington Department of Natural Resources: Olympia, WA, USA, 2004.
- Dubé, K.; McCalmon, M. Technical Documentation for Sedmodl, Version 2.0 Road Erosion/Delivery Model. 2004. Available online: http://www.ncasi.org/support/downloads (accessed on 7 December 2009).
- Brooks, E.S.; Boll, J.; Elliot, W.J.; Tom, D. Global positioning system/GIS-based approach for modeling erosion from large road networks. J. Hydrol. Eng. 2006, 11, 418–426. [Google Scholar] [CrossRef]
- Prasad, A.; Tarboton, D.G.; Luce, C.H.; Black, T.A. A GIS tool to analyze forest road sediment production and stream impacts. In Proceedings of the 25th ESRI Users Conference, San Diego, CA, USA, July 2005.
- Jazouli, R.; Verbyla, D.L.; Murphy, D.L. Evaluation of spot panchromatic digital imagery for updating road locations in a harvested forest area. Photogramm. Eng. Remote Sens. 1994, 60, 1449–1452. [Google Scholar]
- Gucinski, H.; Furniss, M.J.; Ziemer, R.R.; Brookes, M.H. Forest Roads: A Synthesis of Scientific Information; PNW-GTR-509; USDA Forest Service, Pacific Northwest Research Station: Corvallis, OR, USA, 2001.
- Coghlan, G.; Sowa, R. National Forest Road System and Use (Draft Report); USDA Forest Service: Washington, DC, USA, 1998.
- Keane, R.E.; Long, D.G.; Menakis, J.P.; Hann, W.J.; Bevins, C.D. Simulating Coarse Scale Vegetation Dynamics Using the Columbia River Basin Succession Model-CRBSUM; USDA Forest Service, Intermountain Research Station: Ogden, UT, USA, 1996.
- Lee, D.C.; Scedell, J.R.; Thurow, R.F.; Williams, J.E.; Burns, D.; Clayton, J.; Decker, L.; Gresswell, R.; House, R.; Howell, P.; Lee, K.M.; Overton, C.T.; Perkinson, D.; Tu, K.; Van Eimeren, P. Broadscale assessment of aquatic species and habitats. In The Interior Columbia Basin Ecosystem Management Project: Scientific Assessment; Quigley, T.M., Ed.; U.S. Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 1997; pp. 1057–1713. [Google Scholar]
- Forman, R.T.; Sperling, T.D.; Bissonette, J.A.; Clevenger, A.P.; Cutshall, C.D.; Dale, V.H.; Fahrig, L.; France, R.; Goldman, C.R.; Heanue, K.; Jones, J.A.; Swanson, F.J.; Turrentine, T.; Winter, T.C. Road ecology: Science and Solutions; Island Press: Washington, DC, USA, 2003. [Google Scholar]
- Menning, K.M.; Erman, D.C.; Johnson, K.N.; Sessions, J. Modeling Aquatic and Riparian Systems, Assessing Cumulative Watershed Effects, and Limiting Watershed Disturbance; Sierra Nevada Ecosystem Project: Final Report to Congress, Addendum; University of California, Centers for Water and Wildland Resources: Davis, CL, USA, 1996; pp. 33–51. [Google Scholar]
- Reutebuch, S.E.; McGaughey, R.J.; Andersen, H.-E.; Carson, W. Accuracy of a high-resolution LiDAR terrain model under a conifer forest canopy. Can. J. For. Res. 2003, 29, 527–535. [Google Scholar] [CrossRef]
- Evans, J.; Hudak, A.; Faux, R.; Smith, A.M.S. Discrete return LiDAR in natural resources: recommendations for project planning, data processing, and deliverables. Remote Sens. 2009, 1, 776–794. [Google Scholar] [CrossRef]
- Shrestha, R.L.; Carter, W.E.; Lee, M.; Finer, P.; Satori, M. Airborne laser swath mapping: Accuracy assessment for surveying and mapping applications. Surveying and Land Information Systems 1999, 59, 83–94. [Google Scholar]
- Hudak, A.T.; Evans, J.S.; Smith, A.M.S. LiDAR utility for natural resource managers. Remote Sensing 2009, 1, 934–951. [Google Scholar] [CrossRef]
- Reutebuch, S.E.; Andersen, H.-E.; McGaughey, R.J. Light detection and ranging (LiDAR): An emerging tool for multiple resource inventory. J. Forest. 2005, 103, 286–292. [Google Scholar]
- Falkowski, M.J.; Evans, J.S.; Martinuzzi, S.; Gessler, P.E.; Hudak, A.T. Characterizing forest succession with LiDAR data: An evaluation for the Inland Northwest, USA. Remote Sens. Environ. 2009, 113, 946–956. [Google Scholar] [CrossRef]
- Kraus, K.; Pfeifer, N. Determination of terrain models in wooded areas with airborne laser scanner data. J. Photogramm. Remote Sens. 1998, 53, 193–203. [Google Scholar] [CrossRef]
- Schulz, W.H. Landslides susceptibility revealed by LiDAR imagery and historical records, Seattle, Washington. Eng. Geol. 2007, 89, 67–87. [Google Scholar] [CrossRef]
- James, L.A.; Watson, D.G.; Hansen, W.F. Using LiDAR data to map gullies and headwater streams under forest canopy: South Carolina, USA. Catena 2007, 71, 132–144. [Google Scholar] [CrossRef]
- Crow, P.; Benham, S.; Devereux, B.J.; Amable, G.S. Woodland vegetation and its implications for archaeological survey using LiDAR. Forestry 2007, 80, 241–252. [Google Scholar] [CrossRef]
- Krogstad, F.; Schiess, P. The allure and pitfalls of using LiDAR topography in harvest and road design. In Proceedings of The International Mountain Logging Conference, Vancouver, BC, Canada; 2004. [Google Scholar]
- Aruga, K.; Sessions, J.; Miyata, E.S. Forest road design with soil sediment evaluation using a high resolution DEM. J. For. Res. 2005, 10, 471–479. [Google Scholar] [CrossRef]
- Rieger, W.; Kerschner, M.; Reiter, T.; Rottensteiner, F. Roads and buildings from laser scanner data within a forest enterprise. In Proceedings of the ISPRS Workshop “Mapping Surface Structure And Topography By Airborne And Spaceborne Lasers”, La Jolla, CA, USA.International Archives of Photogrammetry and Remote Sensing; Csatho, B.M. (Ed.) 1999; Volume XXXII, pp. 185–191.
- David, N.; Mallet, C.; Pons, T.; Chauve, A.; Bretar, F. Pathway detection and geometrical description from ALS data in forested mountainous area. In Proceedings of Laser Scanning 2009, Paris, France; Bretar, F., Pierrot-Deseilligny, M., Vosselman, G., Eds.; 2009; Volume XXXVIII. [Google Scholar]
- Quackenbush, L. A review of techniques for extracting linear features from imagery. Photogramm. Eng. Remote Sens. 2004, 70, 1383–1392. [Google Scholar] [CrossRef]
- Clode, S.; Rottensteiner, F.; Kootsookos, P.; Zelniker, E. Detection and vectorization of roads from LiDAR data. Photogramm. Eng. Remote Sens. 2007, 73, 517–536. [Google Scholar] [CrossRef]
- Auclair-Fortierm, M.-F.; Ziou, D.; Armenakis, C.; Wang, S. Survey of Work on Road Extraction in Aerial and Satellite Images; Tech. Rep. TR-247; Department of Mathematics and Computer Science, University of Sherbrooke: Québec, Canada, 2000. [Google Scholar]
- Clode, S.P.; Zelniker, E.E.; Kootsookos, P.J.; Clarkson, I.V.L. A phase coded disk approach to thick curvilinear line detection. In Proceedings of the XII European Signal Processing Conference, Vienna, Austria, September 2004; pp. 1147–1150.
- Alharthy, A.; Bethel, J. Automated road extraction from LiDAR data. In Proceedings of American Society of Photogrammetry and Remote Sensing Annual Conference, Anchorage, AK, USA, 2004.
- Asner, G.P.; Keller, M.; Pereira, R.; Zweede, J. Remote sensing of selective logging in Amazonia assessing limitations based on detailed field observations, Landsat ETM+, and textural analysis. Remote Sens. Environ. 2002, 80, 483–496. [Google Scholar] [CrossRef]
- Lee, H.; Slatton, K.C.; Jhee, H. Detecting forest trails occluded by dense canopies using alsm data. In Proceedings of the Geoscience and Remote Sensing Symposium, Seoul, South Korea, July 2005.
- Shamayleh, H.; Khattak, A. Utilization of LiDAR technology for highway inventory. In Proceedings of the 2003 Mid-Continent Transportation Research Symposium, Ames, IA, USA, August 2003.
- Souleyrette, R.; Hallmark, S.; Pattnaik, S.; O’Brien, M.; Veneziano, D. Grade and cross slope estimation from LiDAR-based surface models. In Application of Advanced Remote Sensing Technology to Asset Management; Hallmark, S., Ed.; Midwest Transportation Consortium: Ames, IA, USA, 2003. [Google Scholar]
- Carson, W.W.; Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. LiDAR applications in forestry—An overview. In Proceedings of the American Society of Photogrammetry and Remote Sensing Annual Conference, Denver, CO, USA, May 2004.
- Strahler, A. Quantitative geomorphology of drainage basins and channel networks. In Handbook of Applied Hydrology; Chow, V.T., Ed.; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Weaver, W.E.; Hagans, D.K. Handbook for Forest and Ranch Roads; Pacific Watershed Associates: Arcata, CA, USA, 1994. [Google Scholar]
- ESRI. ArcGIS; Environmental Systems Research Institute: Redlands, CA, USA, 2008. [Google Scholar]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. In Proceedings of XIXth ISPRS Congress, Amsterdam, The Netherlands; 2000. [Google Scholar]International Archives of Photogrammetry and Remote Sensing; 2000; Volume XXXIII, Part B4.
- Hutchinson, M.F. A new procedure for gridding elevation and stream line data with automatic removal of spurious pits. J. Hydrol. 1989, 106, 211–232. [Google Scholar] [CrossRef]
- Evans, J.S.; Hudak, T. A multiscale curvature algorithm for classifying discrete return LiDAR in forested environments. IEEE Trans.Geosci. Remote Sens. 2007, 45, 1029–1038. [Google Scholar] [CrossRef]
- Jenks, G. Lines, computers, and human frailties. Ann. Assn. Amer. Geogr. 1981, 71, 1–10. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Hunter, G.J. A simple positional accuracy measure for linear features. Int. J. Geogr. Inf. Sci. 1997, 11, 299–306. [Google Scholar] [CrossRef]
- McGauhey, R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization; USDA Forest Service, Pacific Northwest Research Station: Seattle, WA, USA, 2009.
- Hodgson, M.E.; Jensen, J.; Raber, G.; Tullis, J.; Davis, B.A.; Thompson, G.; Schuckman, K. An Evaluation of LiDAR-derived elevation and terrain slope in leaf-off conditions. Photogramm. Eng. Remote Sens. 2005, 71, 817–823. [Google Scholar] [CrossRef]
- Doucette, P.; Grodecki, J.; Clelland, R.; Hsu, A.; Nolting, J.; Malitz, S.; Kavanagh, C.; Barton, S.; Tang, M. Evaluating automated road extraction in different operational modes. In Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XV; Shen, S.S., Lewis, P.E., Eds.; SPIE: Bellingham, WA, USA, 2009; Proceedings of SPIE Series; Volume 7334. [Google Scholar]
- US Bureau of the Budget. United States National Map Accuracy Standards; US Bureau of the Budget: Washington, DC, USA, 1947.
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
White, R.A.; Dietterick, B.C.; Mastin, T.; Strohman, R. Forest Roads Mapped Using LiDAR in Steep Forested Terrain. Remote Sens. 2010, 2, 1120-1141. https://doi.org/10.3390/rs2041120
White RA, Dietterick BC, Mastin T, Strohman R. Forest Roads Mapped Using LiDAR in Steep Forested Terrain. Remote Sensing. 2010; 2(4):1120-1141. https://doi.org/10.3390/rs2041120
Chicago/Turabian StyleWhite, Russell A., Brian C. Dietterick, Thomas Mastin, and Rollin Strohman. 2010. "Forest Roads Mapped Using LiDAR in Steep Forested Terrain" Remote Sensing 2, no. 4: 1120-1141. https://doi.org/10.3390/rs2041120