
Spreading of Localized Information across an Entire 3D Electrical Resistivity Volume via Constrained EMI Inversion Based on a Realistic Prior Distribution



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
- Discretizing the 1D resistivity model in a certain number of layers (in our specific case, we always considered layers; the interfaces of those layers are at fixed depths; the layers’ thicknesses increase logarithmically with the depth; the top of the bottom half space, i.e., the top of the st layer, —is at m depth);
- Picking a random number from a homogeneous distribution varying from 3 to (in all the inversions performed in the present paper: was always ); is the number of layers whose resistivity values are selected randomly. Hence, out of , layers have a resistivity value picked from a homogeneous distribution spanning from a minimum and a maximum resistivity value (in our specific case, the resistivity was made varying from to );
- Associating each of the remaining () layers to its specific resistivity value; that resistivity value is set equal to the linear interpolation between the adjacent layers whose resistivity was determined randomly as described in the previous point.
3. Experimental Data
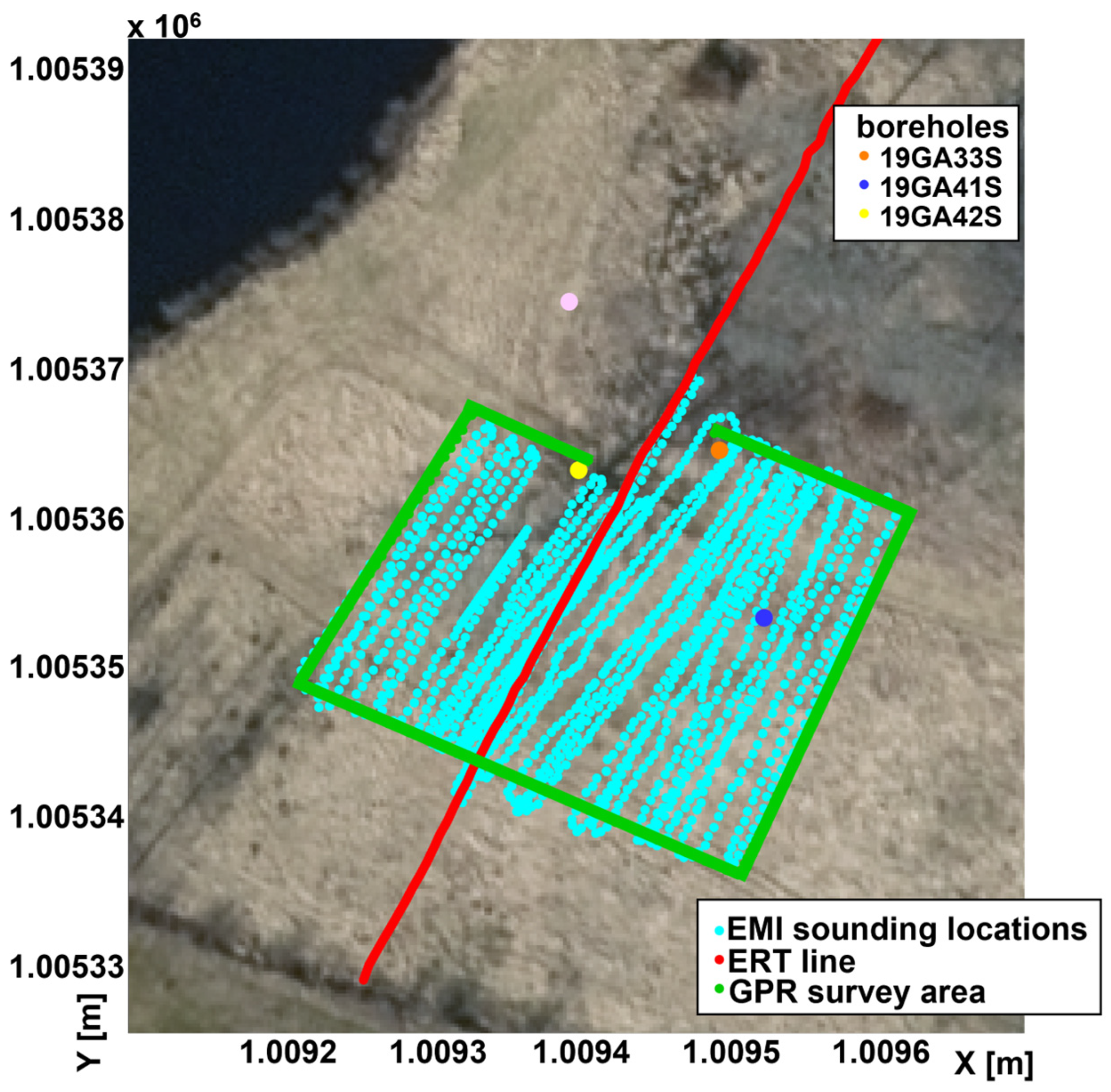
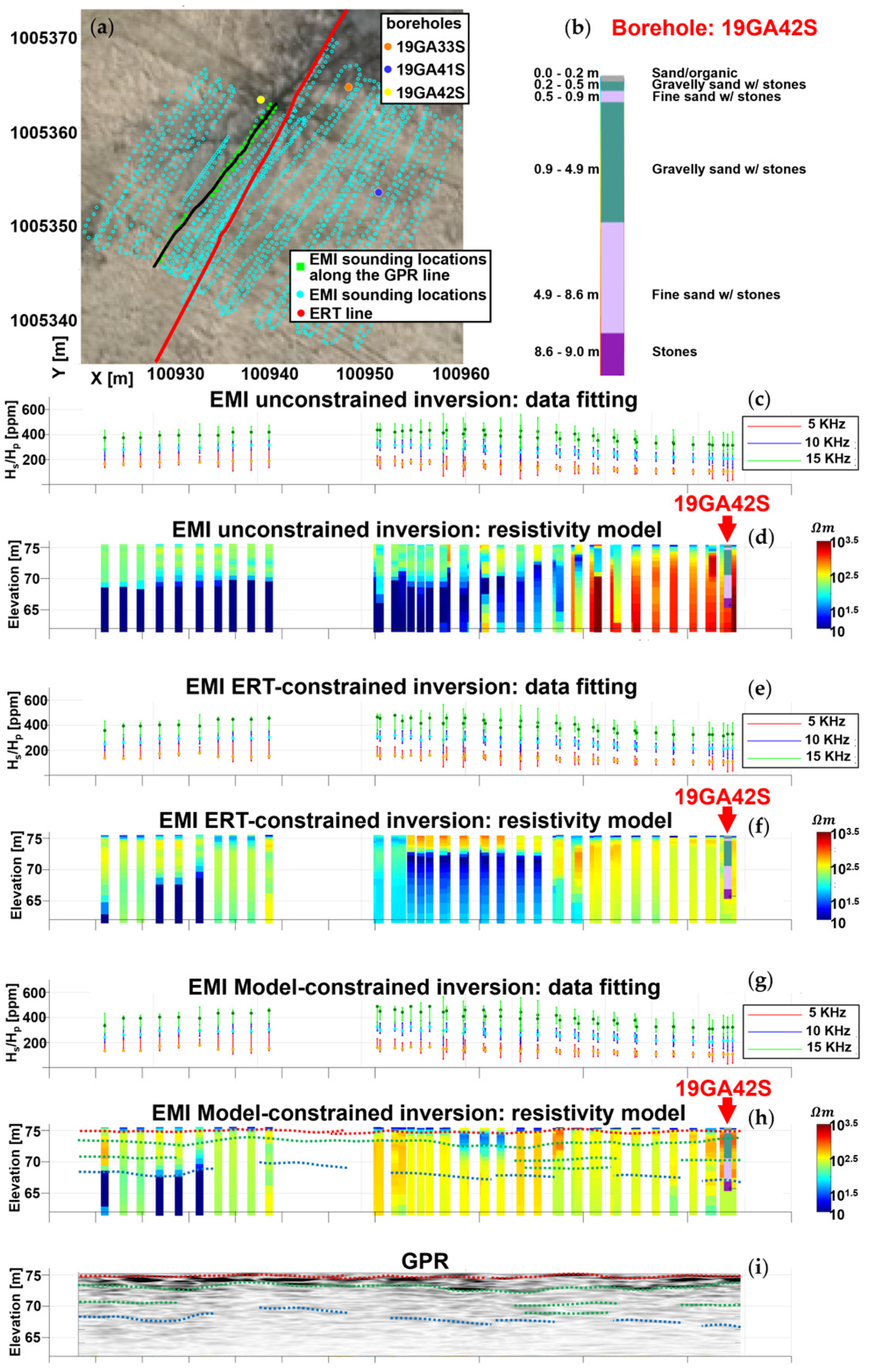
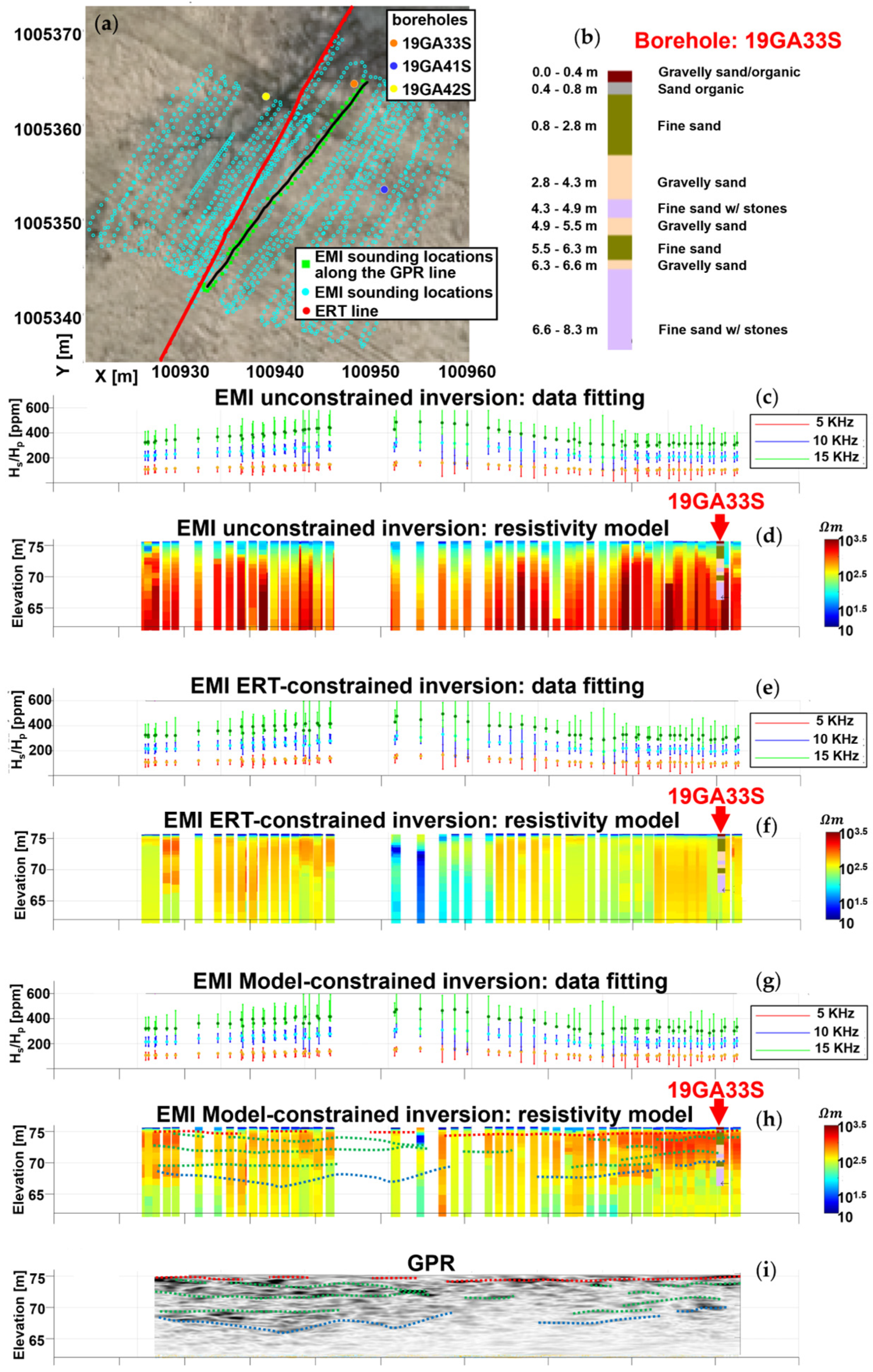
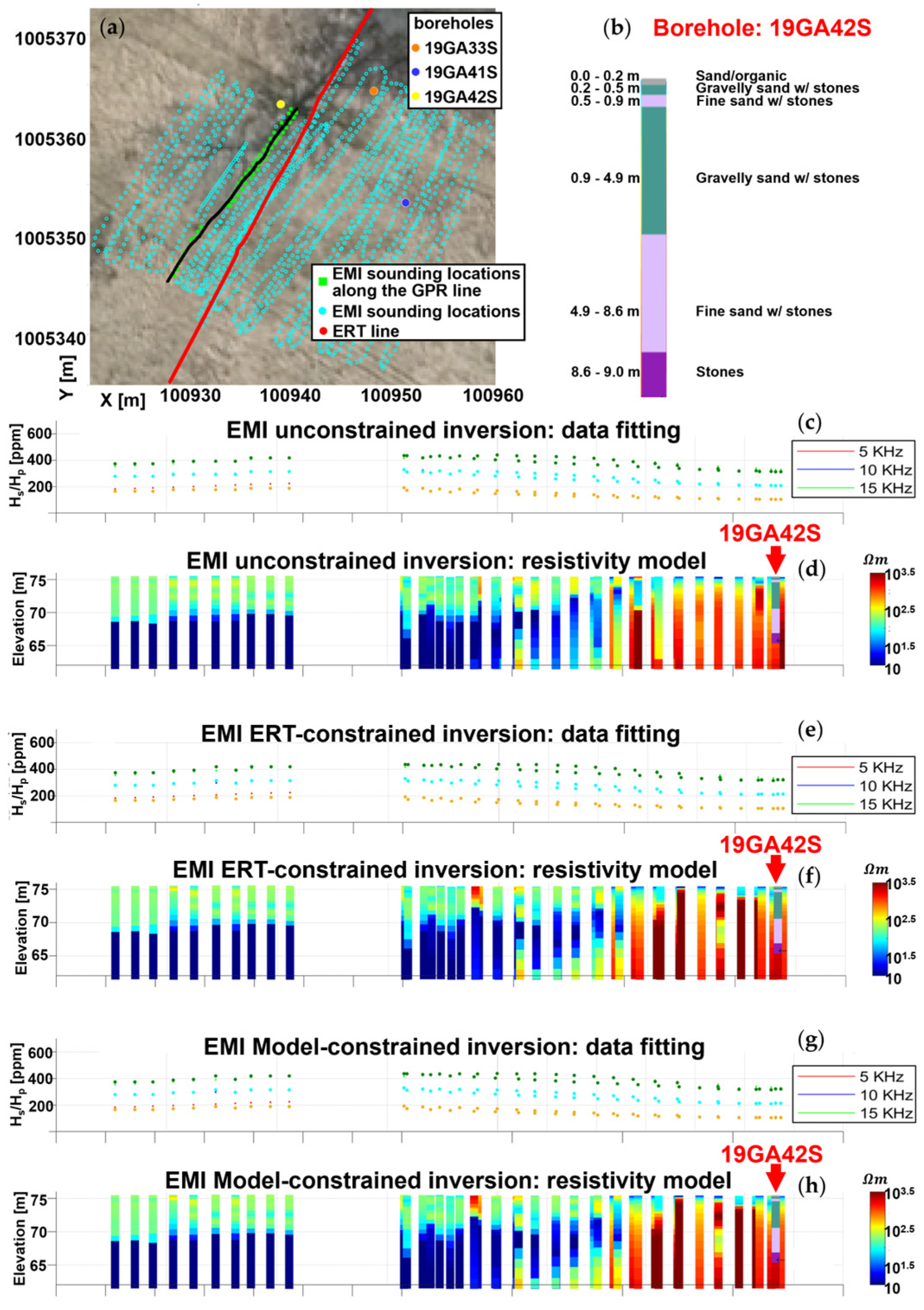
- The EMI measurements collected using a Profiler EMP-400 manufactured by GSSI [57,58,59] with three operative frequencies: , , and . The EMI equipment was calibrated on-site following the procedure outlined by the manufacturer. The sounding locations (1550 soundings with 3 frequencies each) were depicted as light blue dots in Figure 1 over an area of approximately .
- One ERT acquisition line crossing, in the middle, the entire EMI survey area (red line in Figure 1). The ERT survey was performed using a Terrameter LS2 instrument (GuidelineGeo), with 81 electrodes spaced 1 m. The contact electrical resistance was less than 1 KΩ, and the 1603 data points obtained were acquired via a gradient nested array. The inversion of the ERT section, performed with the software pyGIMLi [60], is shown in Figure 3a (only the portion of the profile included in the area investigated with the EMI method is visible). In Figure 3a, at around , the presence of the pipe is clearly recognizable as a very conductive spot.
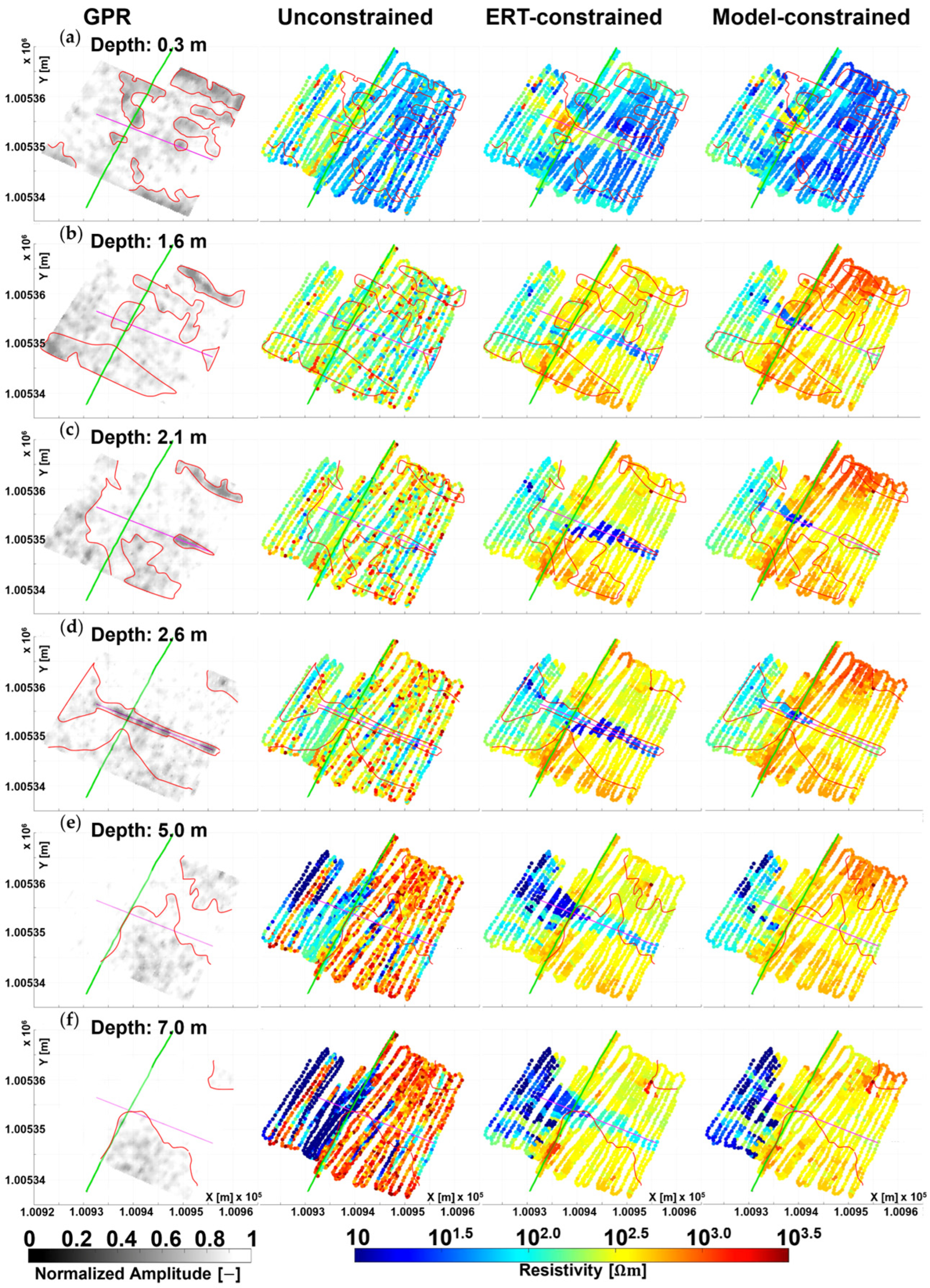
- Several GPR profiles in a grid, overlapping the area of the EMI survey. GPR data were acquired using an ImpulseRadar CO1760 instrument. The GPR results were obtained through processing the 170 MHz signal following the standard workflow consisting of: band-pass filtering, time-zero correction, ringing removal via FK-filtering, and application of the same gain to all sections. The processing output was then Kirchhoff migrated and the signal’s envelope was subsequently interpolated over the 3D volume. For the time-depth conversion, a homogeneous velocity was considered across the entire survey volume; the used velocity value was 95 m/μs. This specific value was estimated by fitting and averaging several diffraction hyperbolas. The reliability of the assumed velocity was verified through the migration and its value was deemed to be compatible with the freshwater-saturated sand/gravel environments [61] characterizing the field site.
4. Results
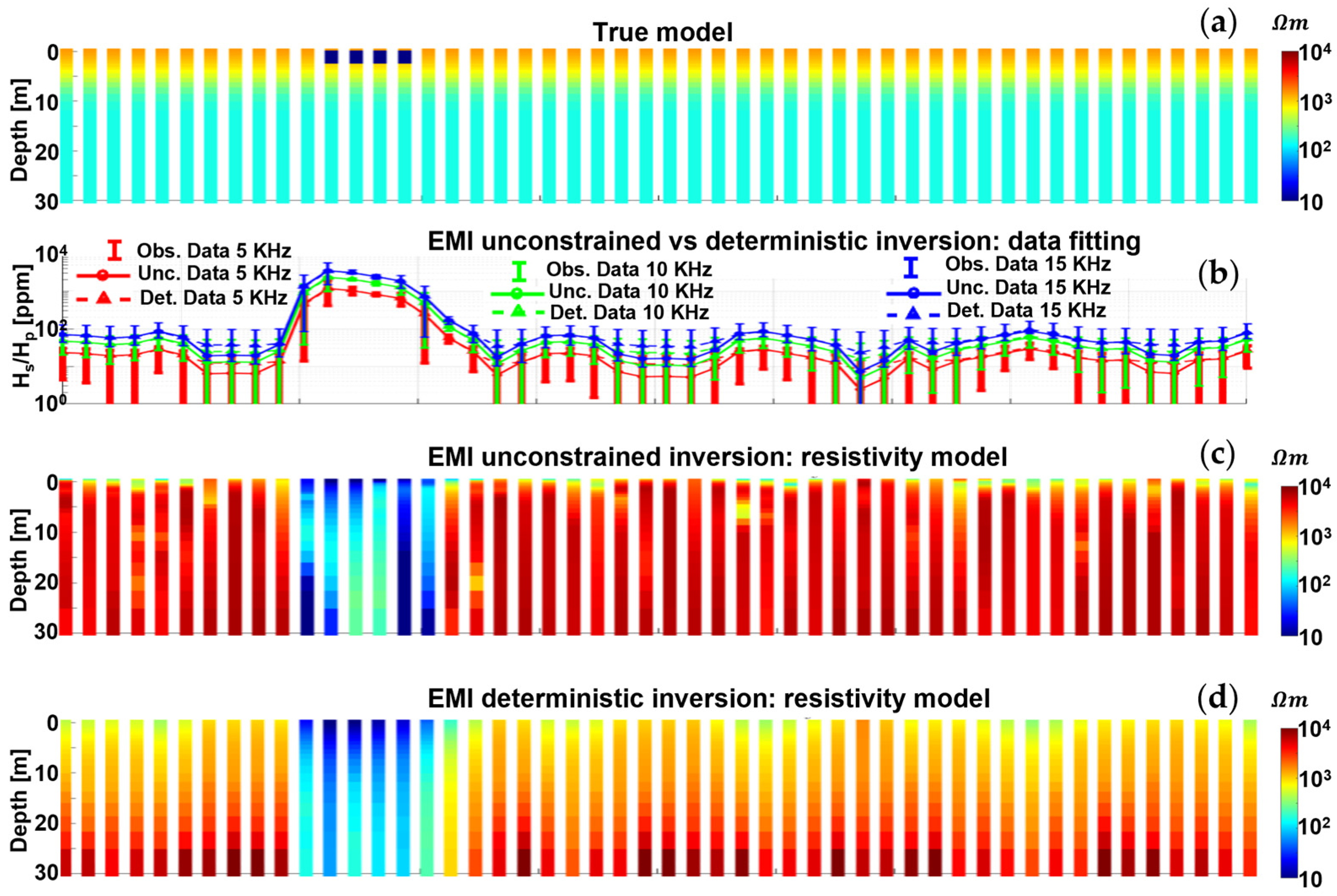
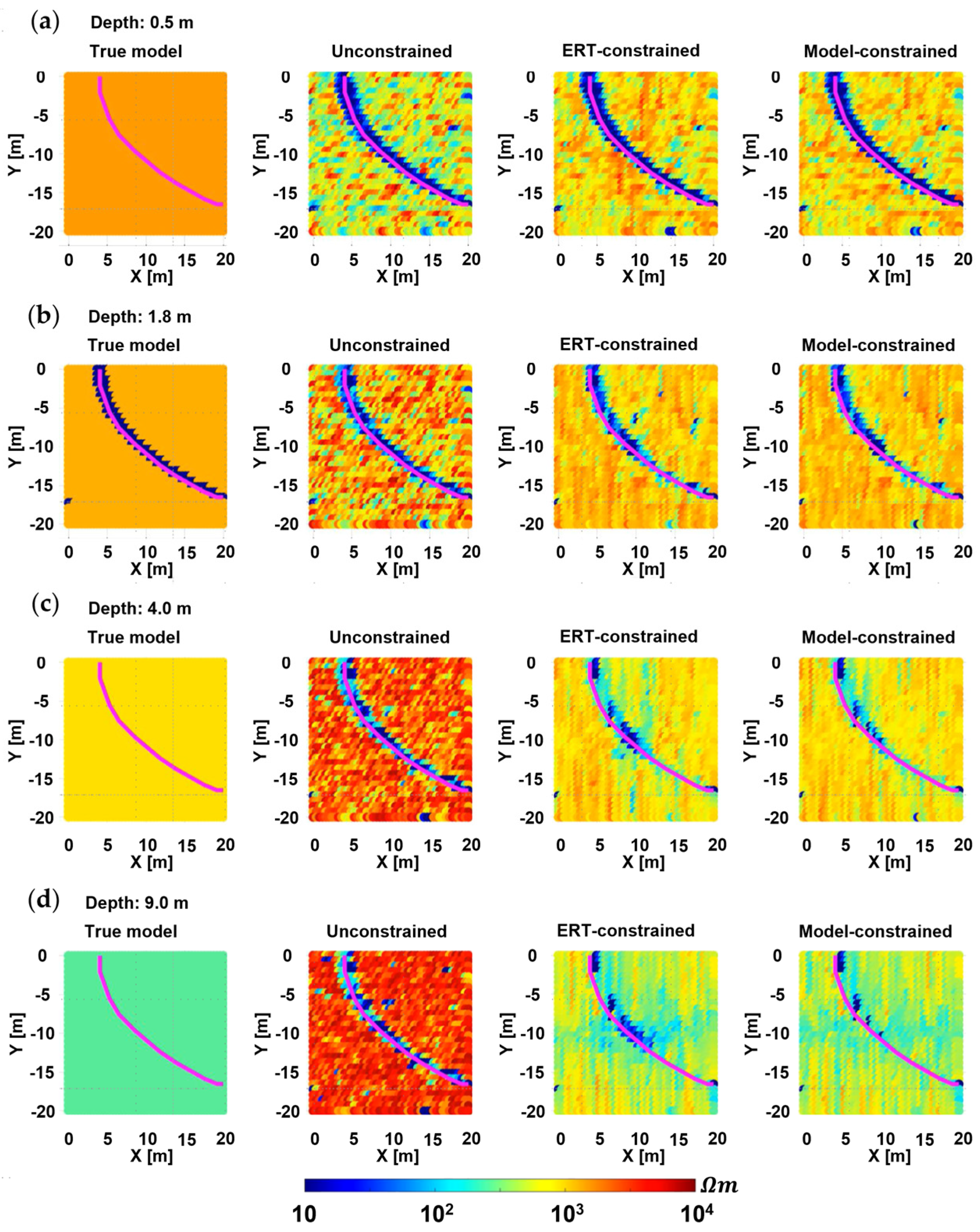
4.1. Synthetic Test
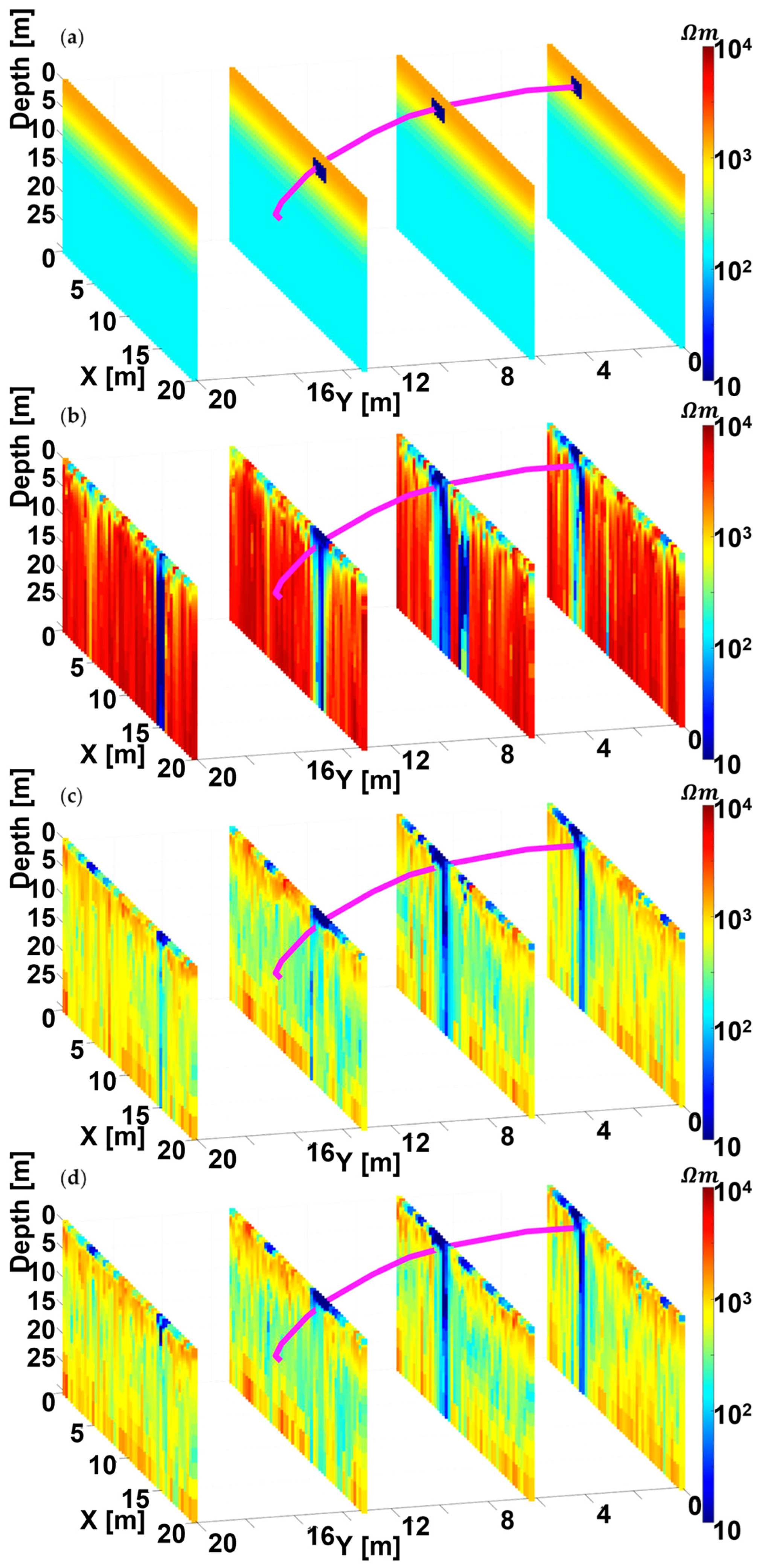
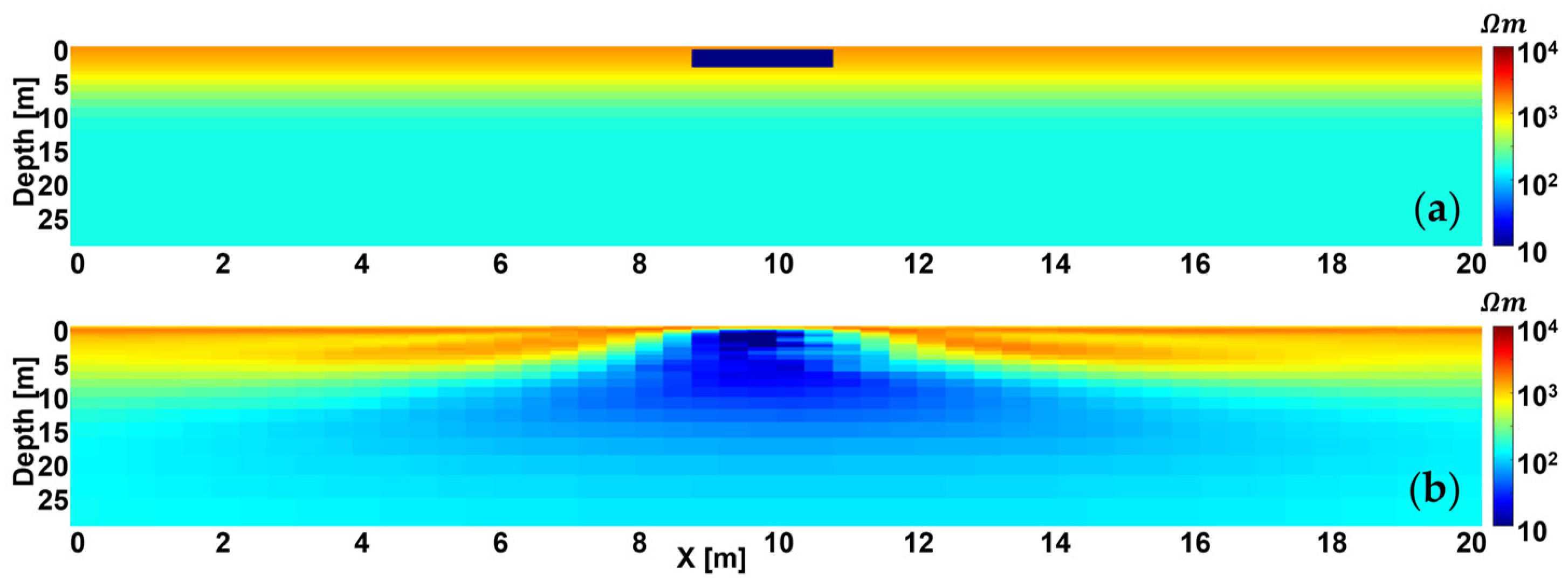
- In the first test, the 2D section consisted of the result of a 2D ERT inversion (Figure 6b). Specifically, the 2D ERT response of the true resistivity model section at (Figure 6a) was first calculated and then inverted. Then, the resulting ERT section (Figure 6b) at that location was used to spatially constrain the EMI inversion.
- In the second test, the 2D section consisted of a slice (still at ) of the true resistivity model (Figure 6a).
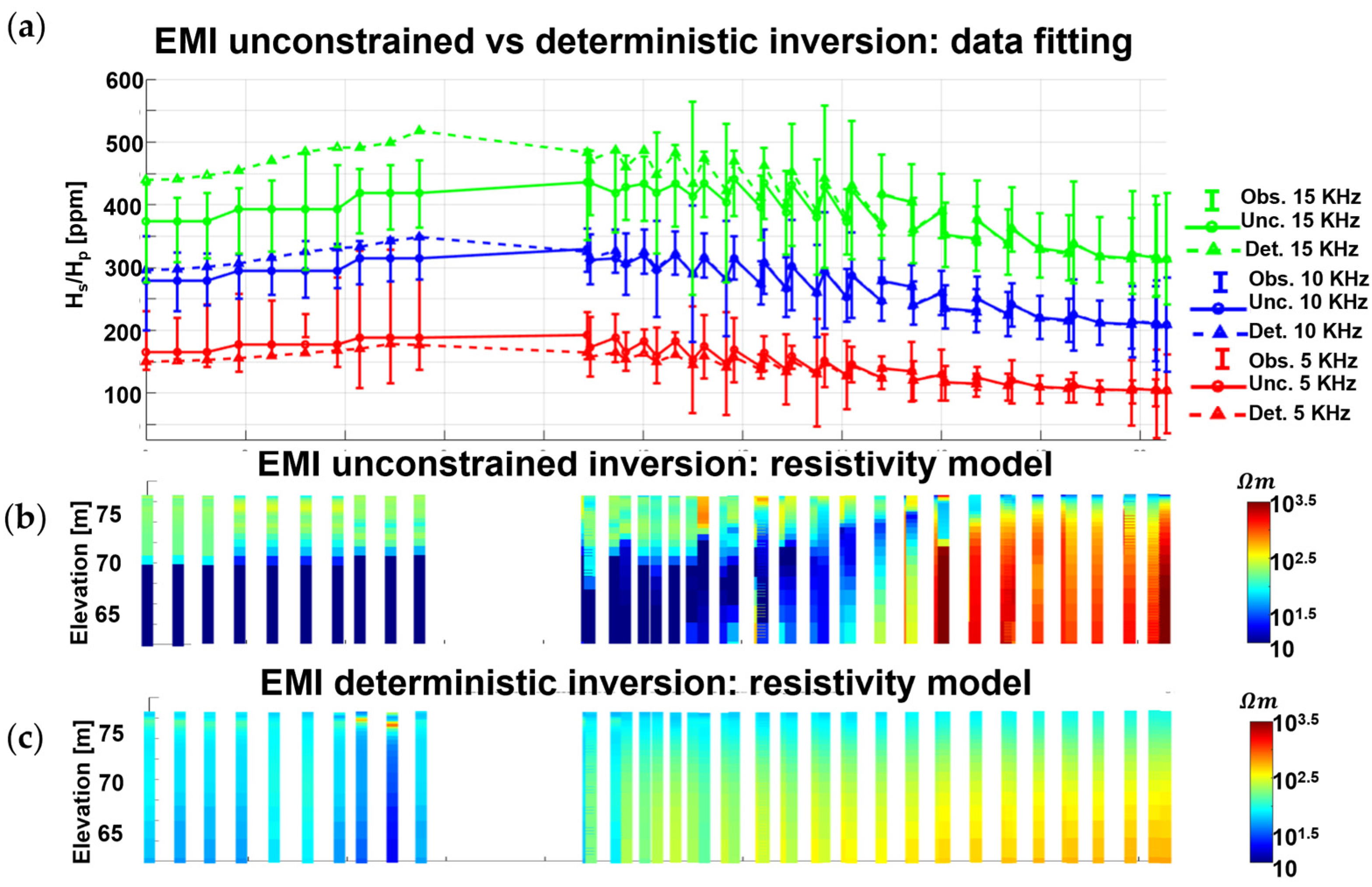
4.2. Field Test
5. Discussion
- Of an arbitrarily complex prior distribution (used for conditioning the solution along the vertical direction, i.e., sounding-by-sounding).
- Of the ancillary available information in the form of ERT cross-sections or in the form of the interpretation of the geoelectrical cross-sections (which are useful for enforcing lateral consistency across the final 3D resistivity volume).
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Comparison between the Unconstrained Inversion and the Deterministic L2-Norm Regularization
References
- Ghorbani, A.; Camerlynck, C.; Florsch, N. CR1Dinv: A Matlab program to invert 1D spectral induced polarization data for the Cole–Cole model including electromagnetic effects. Comput. Geosci. 2009, 35, 255–266. [Google Scholar] [CrossRef]
- Fiandaca, G.; Doetsch, J.; Vignoli, G.; Auken, E. Generalized focusing of time-lapse changes with applications to direct current and time-domain induced polarization inversions. Geophys. J. Int. 2015, 203, 1101–1112. [Google Scholar] [CrossRef] [Green Version]
- Rossi, M.; Dahlin, T.; Olsson, P.I.; Günther, T. Data acquisition, processing and filtering for reliable 3D resistivity and time-domain induced polarisation tomography in an urban area: Field example of Vinsta, Stockholm. Near Surf. Geophys. 2018, 16, 220–229. [Google Scholar] [CrossRef] [Green Version]
- Binley, A.; Slater, L. Resistivity and Induced Polarization: Theory and Applications to the Near-Surface Earth; Cambridge University Press: Cambridge, UK, 2020. [Google Scholar]
- Ball, J.; Chambers, J.; Wilkinson, P.; Binley, A. Resistivity imaging of river embankments: 3D effects due to varying water levels in tidal rivers. Near Surf. Geophys. 2023, 21, 93–110. [Google Scholar] [CrossRef]
- Wehrer, M.; Binley, A.; Slater, L.D. Characterization of reactive transport by 3-D electrical resistivity tomography (ERT) under unsaturated conditions. Water Resour. Res. 2016, 52, 8295–8316. [Google Scholar] [CrossRef] [Green Version]
- Troiano, A.; Isaia, R.; Di Giuseppe, M.G.; Tramparulo, F.D.A.; Vitale, S. Deep Electrical Resistivity Tomography for a 3D picture of the most active sector of Campi Flegrei caldera. Sci. Rep. 2019, 9, 15124. [Google Scholar] [CrossRef] [Green Version]
- Von Hebel, C.; Van der Kruk, J.; Huisman, J.A.; Mester, A.; Altdorff, D.; Endres, A.L.; Zimmermann, E.; Garré, S.; Vereecken, H. Calibration, conversion, and quantitative multi-layer inversion of multi-coil rigid-boom electromagnetic induction data. Sensors 2019, 19, 4753. [Google Scholar] [CrossRef] [Green Version]
- Yi, M.J.; Sasaki, Y. 2-D and 3-D joint inversion of loop–loop electromagnetic and electrical data for resistivity and magnetic susceptibility. Geophys. J. Int. 2015, 203, 1085–1095. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Yin, C.; Su, Y.; Liu, Y.; Wang, L.; Liang, H.; Wang, H. Two-dimensional fast imaging of airborne EM data based on U-net. Front. Earth Sci. 2023, 10, 1082876. [Google Scholar] [CrossRef]
- Arato, A.; Vagnon, F.; Comina, C. First application of a new seismo-electric streamer for combined resistivity and seismic measurements along linearly extended earth structures. Near Surf. Geophys. 2022, 20, 117–134. [Google Scholar] [CrossRef]
- Piroddi, L.; Calcina, S.V.; Trogu, A.; Ranieri, G. Automated Resistivity Profiling (ARP) to explore wide archaeological areas: The prehistoric site of Mont’e Prama, Sardinia, Italy. Remote Sens. 2020, 12, 461. [Google Scholar] [CrossRef] [Green Version]
- Guillemoteau, J.; Lück, E.; Tronicke, J. 1D inversion of direct current data acquired with a rolling electrode system. J. Appl. Geophys. 2017, 146, 167–177. [Google Scholar] [CrossRef]
- Guillemoteau, J.; Christensen, N.B.; Jacobsen, B.H.; Tronicke, J. Fast 3D multichannel deconvolution of electromagnetic induction loop-loop apparent conductivity data sets acquired at low induction numbers. Geophysics 2017, 82, E357–E369. [Google Scholar] [CrossRef] [Green Version]
- Koganti, T.; Van De Vijver, E.; Allred, B.J.; Greve, M.H.; Ringgaard, J.; Iversen, B.V. Mapping of agricultural subsurface drainage systems using a frequency-domain ground penetrating radar and evaluating its performance using a single-frequency multi-receiver electromagnetic induction instrument. Sensors 2020, 20, 3922. [Google Scholar] [CrossRef]
- Misra, S.; Han, Y.; Jin, Y.; Tathed, P. Multifrequency Electromagnetic Data Interpretation for Subsurface Characterization; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar]
- Karshakov, E.V.; Podmogov, Y.G.; Kertsman, V.M.; Moilanen, J. Combined Frequency Domain and Time Domain Airborne Data for Environmental and Engineering Challenges. J. Environ. Eng. Geophys. 2017, 22, 1–11. [Google Scholar] [CrossRef]
- Yin, C.; Hodges, G. 3D animated visualization of EM diffusion for a frequency-domain helicopter EM system. Geophysics 2007, 72, F1–F7. [Google Scholar] [CrossRef]
- Dzikunoo, E.A.; Vignoli, G.; Jørgensen, F.; Yidana, S.M.; Banoeng-Yakubo, B. New regional stratigraphic insights from a 3D geological model of the Nasia sub-basin, Ghana, developed for hydrogeological purposes and based on reprocessed B-field data originally collected for mineral exploration. Solid Earth 2020, 11, 349–361. [Google Scholar] [CrossRef] [Green Version]
- Thiesson, J.; Kessouri, P.; Schamper, C.; Tabbagh, A. Calibration of frequency-domain electromagnetic devices used in near-surface surveying. Near Surf. Geophys. 2014, 12, 481–491. [Google Scholar] [CrossRef]
- Foged, N.; Auken, E.; Christiansen, A.V.; Sørensen, K.I. Test-site calibration and validation of airborne and ground-based TEM systems. Geophysics 2013, 78, E95–E106. [Google Scholar] [CrossRef] [Green Version]
- Ley-Cooper, Y.; Macnae, J.; Robb, T.; Vrbancich, J. Identification of calibration errors in helicopter electromagnetic (HEM) data through transform to the altitude-corrected phase-amplitude domain. Geophysics 2006, 71, G27–G34. [Google Scholar] [CrossRef]
- Triantafilis, J.; Laslett, G.M.; McBratney, A.B. Calibrating an electromagnetic induction instrument to measure salinity in soil under irrigated cotton. Soil Sci. Soc. Am. J. 2000, 64, 1009–1017. [Google Scholar] [CrossRef]
- Minsley, B.J.; Smith, B.D.; Hammack, R.; Sams, J.I.; Veloski, G. Calibration and filtering strategies for frequency domain electromagnetic data. J. Appl. Geophys. 2012, 80, 56–66. [Google Scholar] [CrossRef]
- Finco, C.; Rejiba, F.; Schamper, C.; Fraga, L.H.C.; Wang, A. Calibration of near-surface multi-frequency electromagnetic induction data. Geophys. Prospect. 2023, 71, 765–779. [Google Scholar] [CrossRef]
- Tarantola, A.; Valette, B. Generalized nonlinear inverse problems solved using the least squares criterion. Rev. Geophys. 1982, 20, 219–232. [Google Scholar] [CrossRef]
- Zhdanov, M. Geophysical Inverse Theory and Regularization Problems, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Bai, P.; Vignoli, G.; Hansen, T.M. 1D stochastic inversion of airborne time-domain electromagnetic data with realistic prior and accounting for the forward modeling error. Remote Sens. 2021, 13, 3881. [Google Scholar] [CrossRef]
- Hansen, T.M.; Cordua, K.S.; Jacobsen, B.H.; Mosegaard, K. Accounting for imperfect forward modeling in geophysical inverse problems—Exemplified for crosshole tomography. Geophysics 2014, 79, H1–H21. [Google Scholar] [CrossRef] [Green Version]
- Vignoli, G.; Fiandaca, G.; Christiansen, A.V.; Kirkegaard, C.; Auken, E. Sharp spatially constrained inversion with applications to transient electromagnetic data. Geophys. Prospect. 2015, 63, 243–255. [Google Scholar] [CrossRef]
- Viezzoli, A.; Auken, E.; Munday, T. Spatially constrained inversion for quasi 3D modelling of airborne electromagnetic data–an application for environmental assessment in the Lower Murray Region of South Australia. Explor. Geophys. 2009, 40, 173–183. [Google Scholar] [CrossRef] [Green Version]
- Brodie, R.; Sambridge, M. A holistic approach to inversion of frequency-domain airborne EM data. Geophysics 2006, 71, G301–G312. [Google Scholar] [CrossRef]
- Christiansen, A.V.; Auken, E.; Kirkegaard, C.; Schamper, C.; Vignoli, G. An efficient hybrid scheme for fast and accurate inversion of airborne transient electromagnetic data. Explor. Geophys. 2016, 47, 323–330. [Google Scholar] [CrossRef] [Green Version]
- McLachlan, P.; Blanchy, G.; Binley, A. EMagPy: Open-source standalone software for processing, forward modeling and inversion of electromagnetic induction data. Comput. Geosci. 2021, 146, 104561. [Google Scholar] [CrossRef]
- Klose, T.; Guillemoteau, J.; Vignoli, G.; Tronicke, J. Laterally constrained inversion (LCI) of multi-configuration EMI data with tunable sharpness. J. Appl. Geophys. 2022, 196, 104519. [Google Scholar] [CrossRef]
- Vignoli, G.; Sapia, V.; Menghini, A.; Viezzoli, A. Examples of improved inversion of different airborne electromagnetic datasets via sharp regularization. J. Environ. Eng. Geophys. 2017, 22, 51–61. [Google Scholar] [CrossRef]
- Ley-Cooper, A.Y.; Viezzoli, A.; Guillemoteau, J.; Vignoli, G.; Macnae, J.; Cox, L.; Munday, T. Airborne electromagnetic modelling options and their consequences in target definition. Explor. Geophys. 2015, 46, 74–84. [Google Scholar] [CrossRef]
- Pagliara, G.; Vignoli, G. Focusing inversion techniques applied to electrical resistance tomography in an experimental tank. In Proceedings of the International Association for Mathematical Geology XI International Congress, Liege, Belgium, 3–8 September 2006. [Google Scholar]
- Thibaut, R.; Kremer, T.; Royen, A.; Ngun, B.K.; Nguyen, F.; Hermans, T. A new workflow to incorporate prior information in minimum gradient support (MGS) inversion of electrical resistivity and induced polarization data. J. Appl. Geophys. 2021, 187, 104286. [Google Scholar] [CrossRef]
- Karaoulis, M.; Revil, A.; Tsourlos, P.; Werkema, D.D.; Minsley, B.J. IP4DI: A software for time-lapse 2D/3D DC-resistivity and induced polarization tomography. Comput. Geosci. 2013, 54, 164–170. [Google Scholar] [CrossRef]
- Klose, T.; Guillemoteau, J.; Vignoli, G.; Walter, J.; Herrmann, A.; Tronicke, J. Structurally constrained inversion by means of a Minimum Gradient Support regularizer: Examples of FD-EMI data inversion constrained by GPR reflection data. Geophys. J. Int. 2023, 233, 1938–1949. [Google Scholar] [CrossRef]
- Zhou, J.; Revil, A.; Karaoulis, M.; Hale, D.; Doetsch, J.; Cuttler, S. Image-guided inversion of electrical resistivity data. Geophys. J. Int. 2014, 197, 292–309. [Google Scholar] [CrossRef] [Green Version]
- Sapia, V.; Oldenborger, G.A.; Viezzoli, A.; Marchetti, M. Incorporating ancillary data into the inversion of airborne time-domain electromagnetic data for hydrogeological applications. J. Appl. Geophys. 2014, 104, 35–43. [Google Scholar] [CrossRef]
- Vignoli, G.; Guillemoteau, J.; Barreto, J.; Rossi, M. Reconstruction, with tunable sparsity levels, of shear wave velocity profiles from surface wave data. Geophys. J. Int. 2021, 225, 1935–1951. [Google Scholar] [CrossRef]
- Hansen, T.M. Efficient probabilistic inversion using the rejection sampler—Exemplified on airborne EM data. Geophys. J. Int. 2021, 224, 543–557. [Google Scholar] [CrossRef]
- Hansen, T.M.; Minsley, B.J. Inversion of airborne EM data with an explicit choice of prior model. Geophys. J. Int. 2019, 218, 1348–1366. [Google Scholar] [CrossRef]
- Hansen, T.M.; Cordua, K.S.; Zunino, A.; Mosegaard, K. Probabilistic integration of geo-information. In Integrated Imaging of the Earth: Theory and Applications; Moorekamp, M., Lelievre, P.G., Linde, N., Khan, A., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2016; Volume 218, pp. 93–116. [Google Scholar]
- Mosegaard, K.; Tarantola, A. Monte Carlo sampling of solutions to inverse problems. J. Geophys. Res. Solid Earth 1995, 100, 12431–12447. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Arsenin, V.Y. Solutions of Ill-Posed Problems, 1st ed.; V. H. Winston & Sons: Washington, DC, USA, 1977. [Google Scholar]
- Høyer, A.S.; Vignoli, G.; Hansen, T.M.; Vu, L.T.; Keefer, D.A.; Jørgensen, F. Multiple-point statistical simulation for hydrogeological models: 3-D training image development and conditioning strategies. Hydrol. Earth Syst. Sci. 2017, 21, 6069–6089. [Google Scholar] [CrossRef] [Green Version]
- Minsley, B.J. A trans-dimensional Bayesian Markov chain Monte Carlo algorithm for model assessment using frequency-domain electromagnetic data. Geophys. J. Int. 2011, 187, 252–272. [Google Scholar] [CrossRef] [Green Version]
- Guillemoteau, J.; Simon, F.X.; Lück, E.; Tronicke, J. 1D sequential inversion of portable multi-configuration electromagnetic induction data. Near Surf. Geophys. 2016, 14, 423–432. [Google Scholar] [CrossRef]
- Elwaseif, M.; Robinson, J.; Day-Lewis, F.D.; Ntarlagiannis, D.; Slater, L.D.; Lane, J.W.; Minsley, B.J.; Schultz, G. A matlab-based frequency-domain electromagnetic inversion code (FEMIC) with graphical user interface. Comput. Geosci. 2017, 99, 61–71. [Google Scholar] [CrossRef] [Green Version]
- Bai, P.; Vignoli, G.; Viezzoli, A.; Nevalainen, J.; Vacca, G. (Quasi-) real-time inversion of airborne time-domain electromagnetic data via artificial neural network. Remote Sens. 2020, 12, 3440. [Google Scholar] [CrossRef]
- Neal, R.M. Bayesian Learning for Neural Networks; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 118. [Google Scholar]
- Zhdanov, M.S.; Vignoli, G.; Ueda, T. Sharp boundary inversion in crosswell travel-time tomography. J. Geophys. Eng. 2006, 3, 122–134. [Google Scholar] [CrossRef] [Green Version]
- Haynie, K.L.; Khan, S.D. Shallow subsurface detection of buried weathered hydrocarbons using GPR and EMI. Mar. Pet. Geol. 2016, 77, 116–123. [Google Scholar] [CrossRef]
- Rashed, M.; Niyazi, B. Environmental impact assessment of the former Al-Musk lake wastewater dumpsite using electromagnetic induction technique. Earth Syst. Environ. 2017, 1, 10. [Google Scholar] [CrossRef]
- Giudici, M.; Mele, M.; Inzoli, S.; Comuinian, A.; Bersezio, R. The application of hydrogeophysics to study water-based ecosystem services in alluvial plains. First Break 2015, 33, 55–60. [Google Scholar] [CrossRef]
- Rücker, C.; Günther, T.; Wagner, F.M. pyGIMLi: An open-source library for modelling and inversion in geophysics. Comput. Geosci. 2017, 109, 106–123. [Google Scholar] [CrossRef]
- Neal, A. Ground-penetrating radar and its use in sedimentology: Principles, problems and progress. Earth-Sci. Rev. 2004, 66, 261–330. [Google Scholar] [CrossRef]
- Torin, L.; Davidsson, L.; Nilsson, M. Inledande projektering av Nisses kemtvätt i Osby; Report for Sveriges Geologiska Undersökning WSP Environmental Sverige: Halmstad, Sweden, 2021. [Google Scholar]
- Kamm, J.; Becken, M.; Pedersen, L.B. Inversion of slingram electromagnetic induction data using a Born approximation. Geophysics 2013, 78, E201–E212. [Google Scholar] [CrossRef]
- Guillemoteau, J.; Tronicke, J. Non-standard electromagnetic induction sensor configurations: Evaluating sensitivities and applicability. J. Appl. Geophys. 2015, 118, 15–23. [Google Scholar] [CrossRef]
- Christiansen, A.V.; Auken, E. A global measure for depth of investigation. Geophysics 2012, 77, WB171–WB177. [Google Scholar] [CrossRef]
- Bai, P. Stochastic Inversion of Time Domain Electromagnetic Data with Non-Trivial Prior. Ph.D. Thesis, University of Cagliari, Cagliari, Italy, 2022. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zaru, N.; Rossi, M.; Vacca, G.; Vignoli, G. Spreading of Localized Information across an Entire 3D Electrical Resistivity Volume via Constrained EMI Inversion Based on a Realistic Prior Distribution. Remote Sens. 2023, 15, 3993. https://doi.org/10.3390/rs15163993
Zaru N, Rossi M, Vacca G, Vignoli G. Spreading of Localized Information across an Entire 3D Electrical Resistivity Volume via Constrained EMI Inversion Based on a Realistic Prior Distribution. Remote Sensing. 2023; 15(16):3993. https://doi.org/10.3390/rs15163993
Chicago/Turabian StyleZaru, Nicola, Matteo Rossi, Giuseppina Vacca, and Giulio Vignoli. 2023. "Spreading of Localized Information across an Entire 3D Electrical Resistivity Volume via Constrained EMI Inversion Based on a Realistic Prior Distribution" Remote Sensing 15, no. 16: 3993. https://doi.org/10.3390/rs15163993