
Uncertainty Assessment of Differential Absorption Lidar Measurements of Industrial Emissions Concentrations


Abstract
:1. Introduction
2. Materials and Methods
2.1. Technique Validation
2.2. Quality Assurance Procedures
2.3. Sources of Uncertainty
- The total uncertainty of the DIAL path-concentration integral u(CL(x));
- The concentration uncertainty u(C(x));
- The concentration plane uncertainty u(Cplane(x));
- The emission rate uncertainty due to the DIAL concentration measurement uc(M(x)).
3. Results
3.1. Determination of Uncertainty Sources
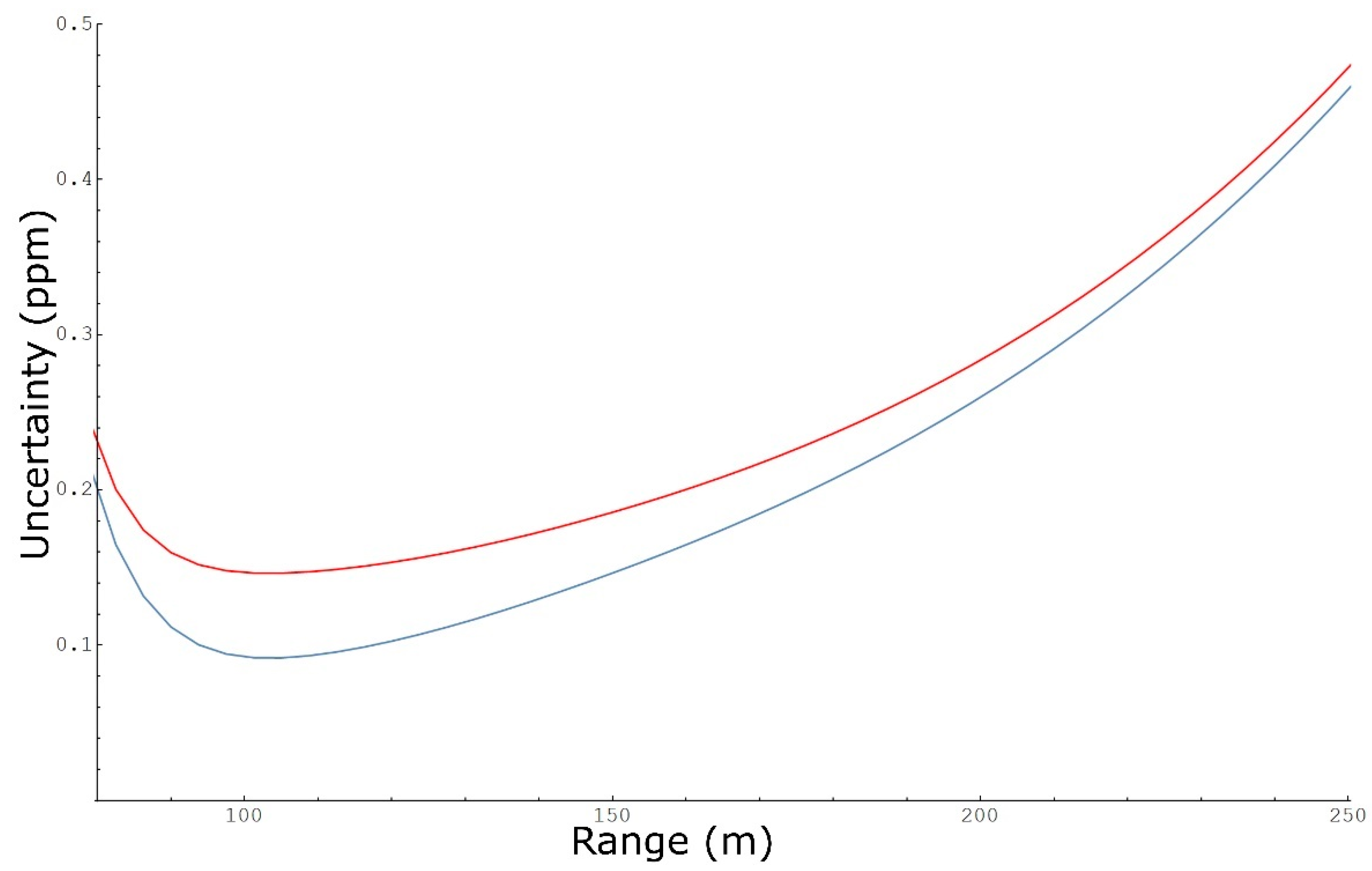
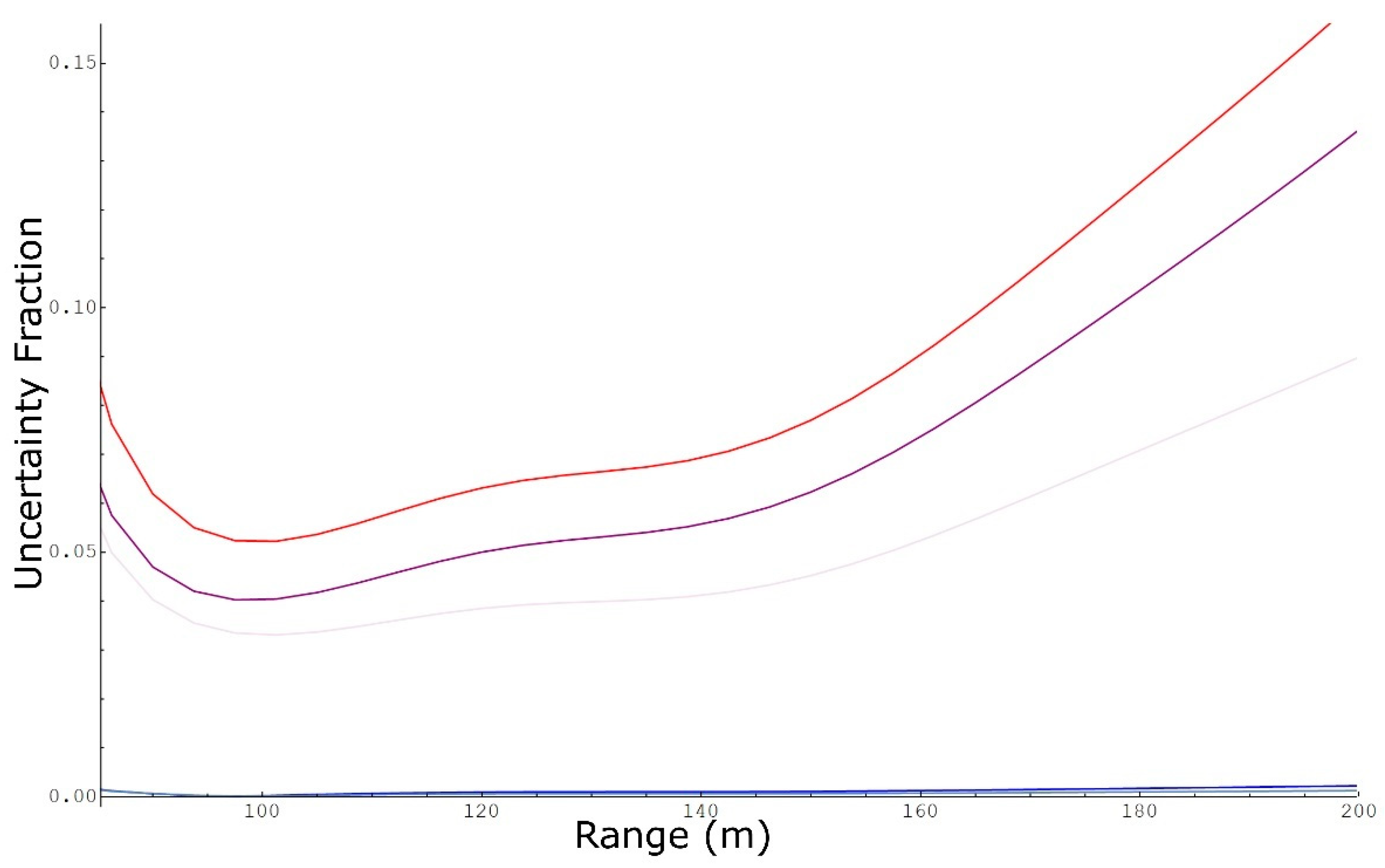
3.2. Mass Emission Rate Uncertainty
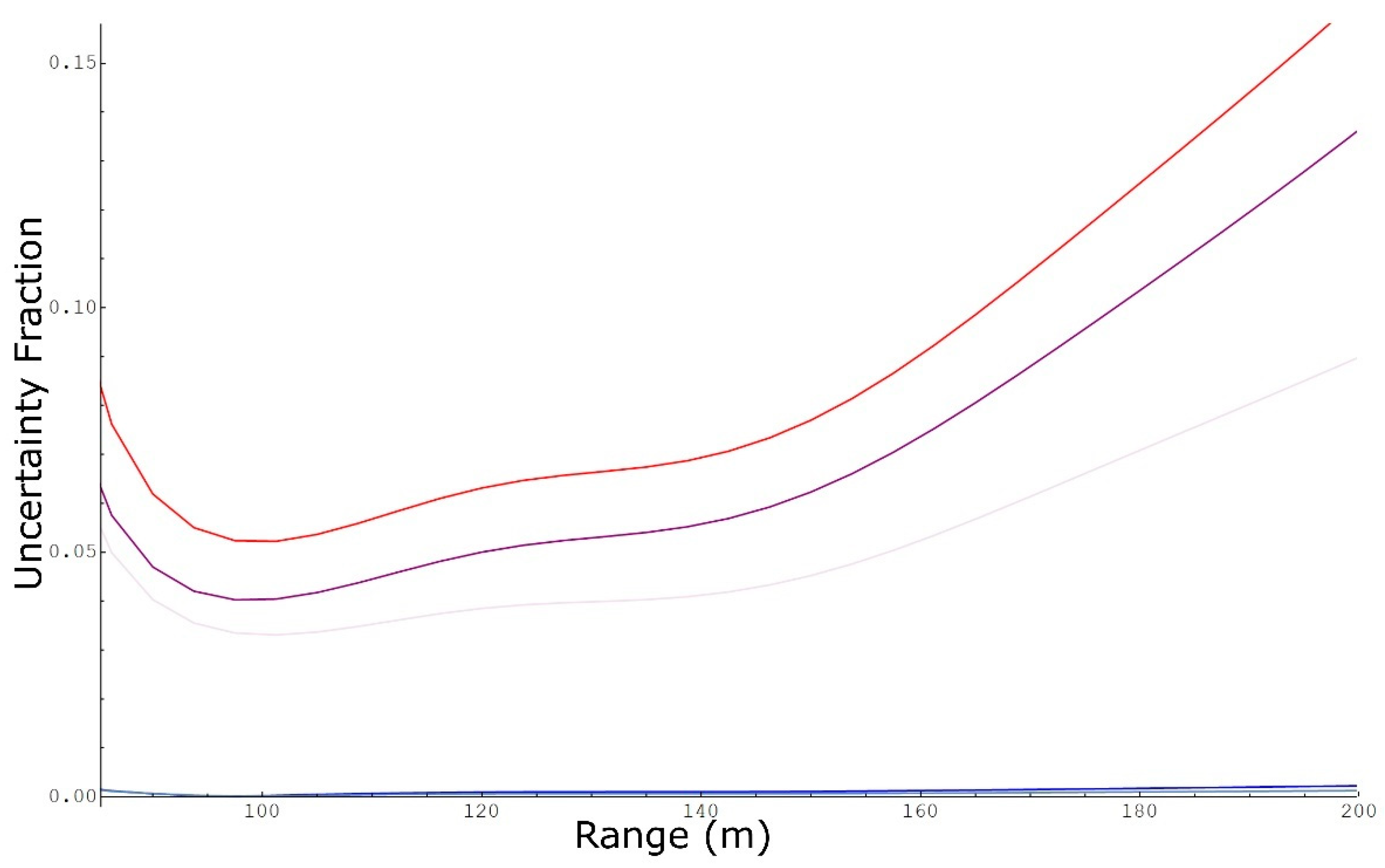
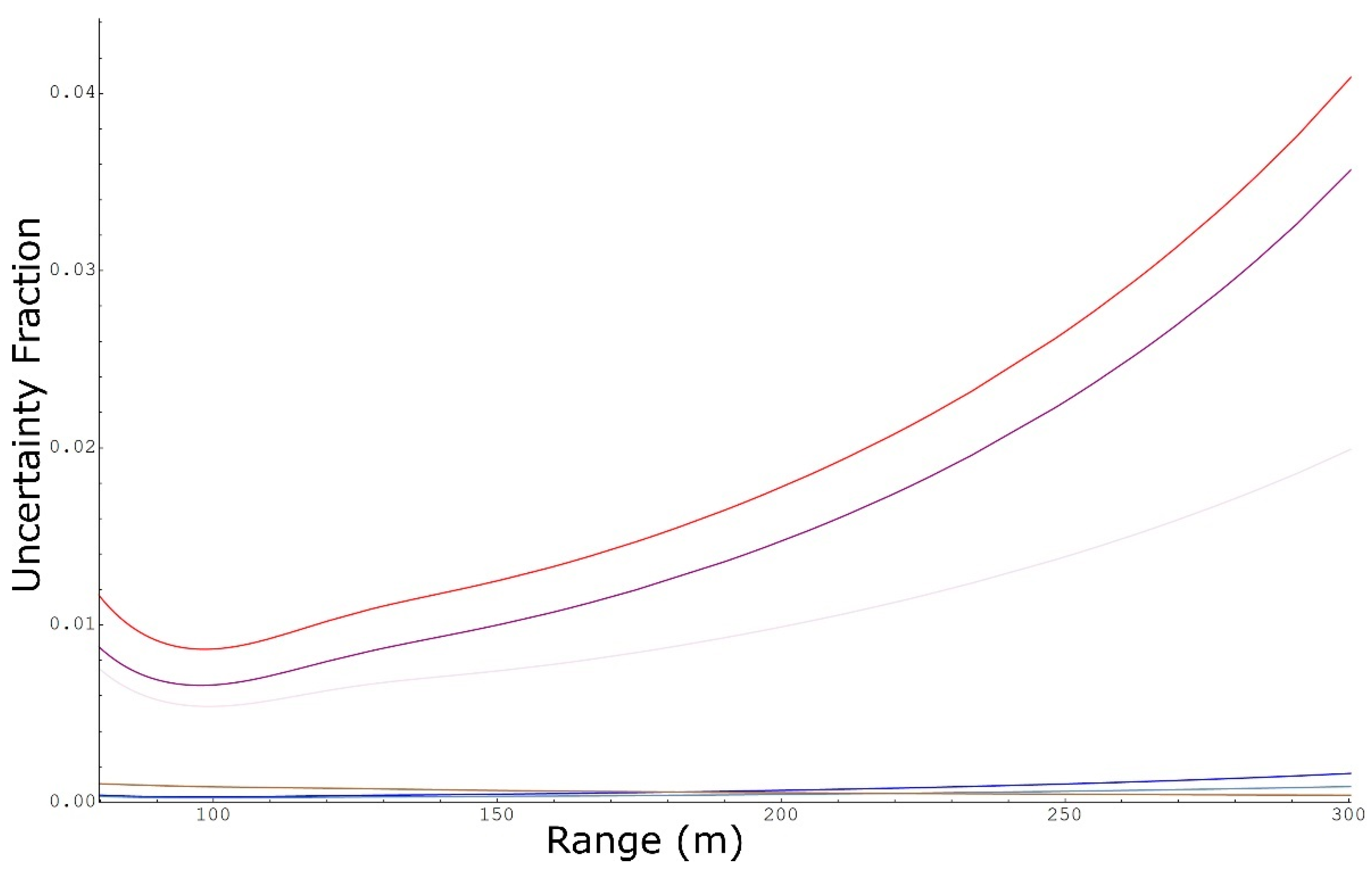
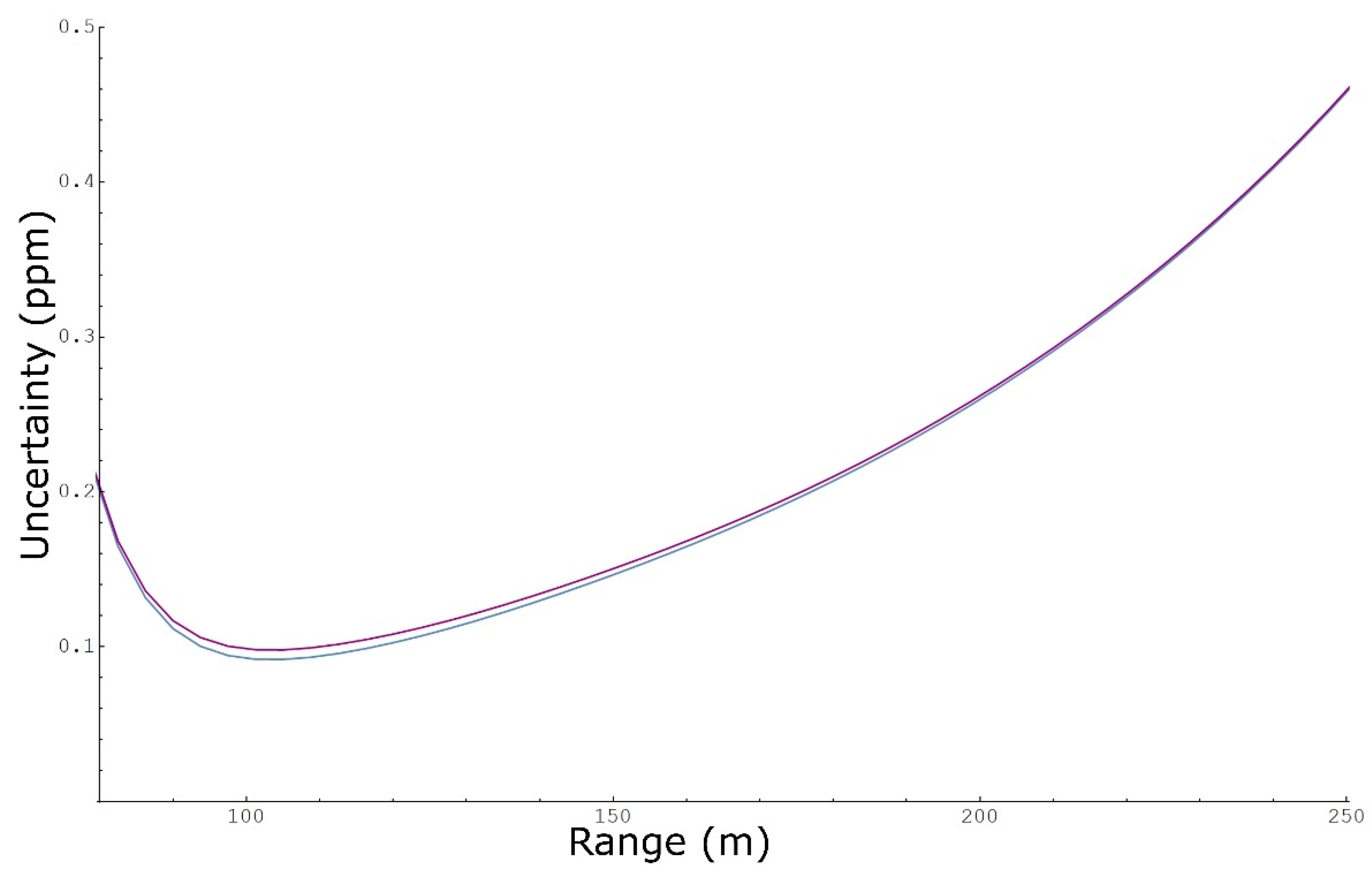
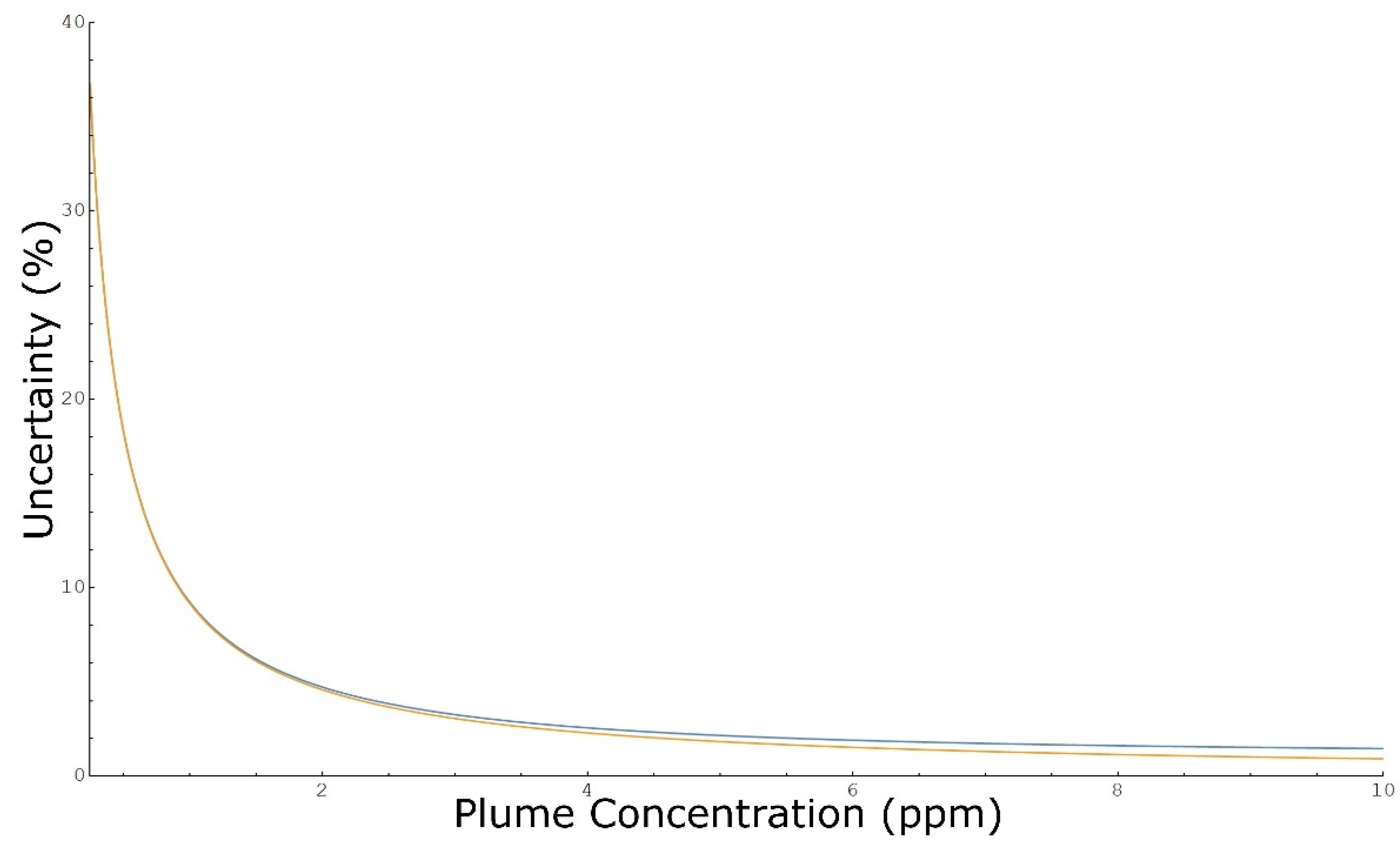
3.3. Concentration Uncertainty
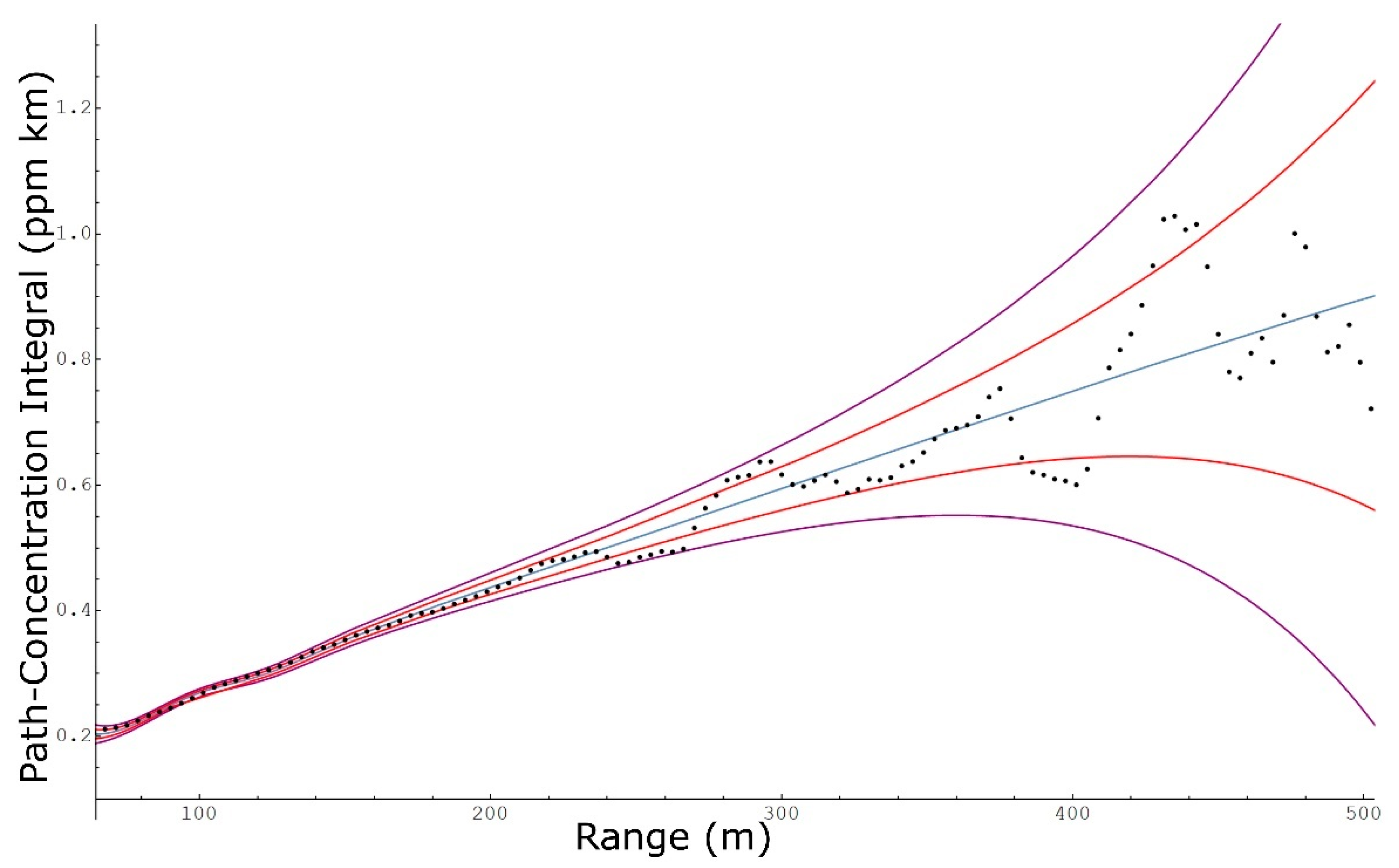
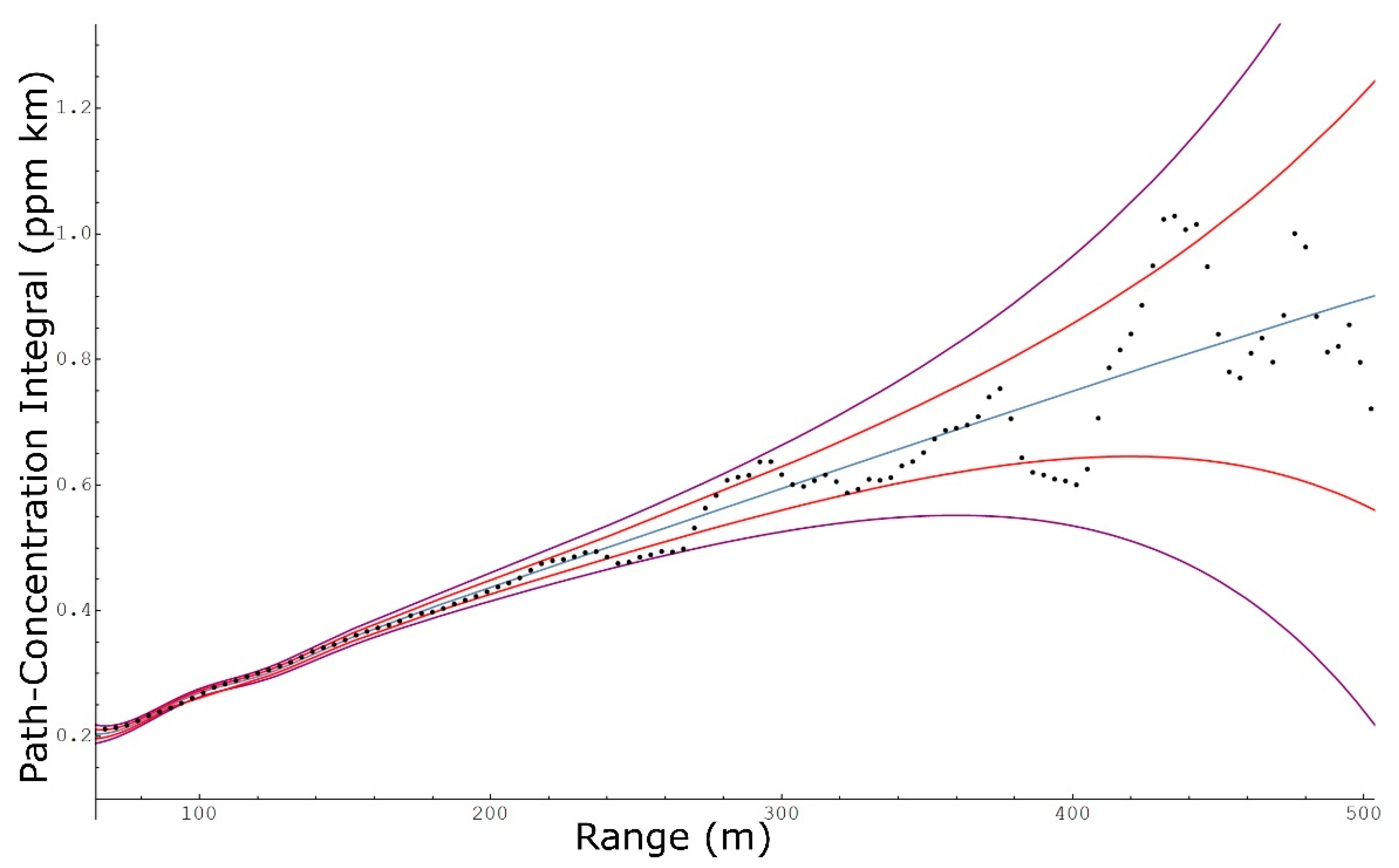
3.4. Path-Concentration Integral Uncertainty
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Barthe, P.; Chaugny, M.; Roudier, S.; Delgado Sancho, L. Best Available Techniques (BAT) Reference Document for the Refining of Mineral Oil and Gas. Industrial Emissions Directive 2010/75/EU (Integrated Pollution Prevention and Control). Publ. Off. Eur. Union 2015. [Google Scholar]
- CEN EN 17628. Available online: https://standards.cencenelec.eu/dyn/www/f?p=205:110:0::::FSP_PROJECT,FSP_LANG_ID:67021,25&cs=1499A1C530EC17BFF9D3EB0305EFECA18 (accessed on 24 March 2022).
- Measures, R.M. Laser Remote Sensing: Fundamentals and Applications; Wiley: New York, NY, USA, 1984; ISBN 978-0-471-08193-7. [Google Scholar]
- Milton, M.J.T.; Woods, P.T.; Jolliffe, B.W.; Swann, N.R.W.; McIlveen, T.J. Measurements of Toluene and Other Aromatic Hydrocarbons by Differential-Absorption LIDAR in the near-Ultraviolet. Appl. Phys. B 1992, 55, 41–45. [Google Scholar] [CrossRef]
- Robinson, R.A.; Woods, P.T.; Milton, M.J.T. DIAL Measurements for Air Pollution and Fugitive-Loss Monitoring. In Proceedings of the Air Pollution and Visibility Measurements SPIE, Munich, Germany, 20 September 1995; Volume 2506, pp. 140–149. [Google Scholar]
- Robinson, R.; Gardiner, T.; Innocenti, F.; Woods, P.; Coleman, M. Infrared Differential Absorption Lidar (DIAL) Measurements of Hydrocarbon Emissions. J. Environ. Monit. 2011, 13, 2213–2220. [Google Scholar] [CrossRef] [PubMed]
- Innocenti, F.; Robinson, R.; Gardiner, T.; Finlayson, A.; Connor, A. Differential Absorption Lidar (DIAL) Measurements of Landfill Methane Emissions. Remote Sens. 2017, 9, 953. [Google Scholar] [CrossRef]
- Byer, R.L.; Garbuny, M. Pollutant Detection by Absorption Using Mie Scattering and Topographic Targets as Retroreflectors. Appl. Opt. 1973, 12, 1496–1505. [Google Scholar] [CrossRef]
- Schotland, R.M. Errors in the Lidar Measurement of Atmospheric Gases by Differential Absorption. J. Appl. Meteorol. 1974, 13, 71–77. [Google Scholar]
- Browell, E.V. Differential Absorption Lidar Sensing of Ozone. Proc. IEEE 1989, 77, 419–432. [Google Scholar] [CrossRef]
- Cao, N.; Fukuchi, T.; Fujii, T.; Collins, R.L.; Li, S.; Wang, Z.; Chen, Z. Error Analysis for NO2 DIAL Measurement in the Troposphere. Appl. Phys. B 2006, 82, 141–148. [Google Scholar] [CrossRef]
- Cao, N.; Li, S.; Fukuchi, T.; Fujii, T.; Collins, R.L.; Wang, Z.; Chen, Z. Measurement of Tropospheric O3, SO2 and Aerosol from a Volcanic Emission Event Using New Multi-Wavelength Differential-Absorption Lidar Techniques. Appl. Phys. B 2006, 85, 163–167. [Google Scholar] [CrossRef]
- Bösenberg, J. Ground-Based Differential Absorption Lidar for Water-Vapor and Temperature Profiling: Methodology. Appl. Opt. AO 1998, 37, 3845–3860. [Google Scholar] [CrossRef]
- Wulfmeyer, V.; Bösenberg, J. Ground-Based Differential Absorption Lidar for Water-Vapor Profiling: Assessment of Accuracy, Resolution, and Meteorological Applications. Appl. Opt. AO 1998, 37, 3825–3844. [Google Scholar] [CrossRef] [PubMed]
- Walmsley, H.L.; O’Connor, S.J. The Accuracy and Sensitivity of Infrared Differential Absorption Lidar Measurements of Hydrocarbon Emissions from Process Units. Pure Appl. Opt. 1998, 7, 907–925. [Google Scholar] [CrossRef]
- Fukuda, T.; Matsuura, Y.; Mori, T. Sensitivity of Coherent Rage-Resolved Differential Absorption Lidar. Appl. Opt. AO 1984, 23, 2026–2032. [Google Scholar] [CrossRef] [PubMed]
- Veerabuthiran, S.; Razdan, A.K. LIDAR for Detection of Chemical and Biological Warfare Agents. Def. Sci. J. 2011, 61, 241–250. [Google Scholar] [CrossRef]
- Veerabuthiran, S.; Razdan, A.K.; Jindal, M.K.; Prasad, G. Open Field Testing of Mid IR DIAL for Remote Detection of Thiodiglycol Vapor Plumes in the Topographic Target Configuration. Sens. Actuators B Chem. 2019, 298, 126833. [Google Scholar] [CrossRef]
- Gong, Y.; Bu, L.; Yang, B.; Mustafa, F. High Repetition Rate Mid-Infrared Differential Absorption Lidar for Atmospheric Pollution Detection. Sensor 2020, 20, 2211. [Google Scholar] [CrossRef]
- Menyuk, N.; Killinger, D.K.; Menyuk, C.R. Error Reduction in Laser Remote Sensing: Combined Effects of Cross Correlation and Signal Averaging. Appl. Opt. AO 1985, 24, 118–131. [Google Scholar] [CrossRef]
- Milton, M.J.; Woods, P.T. Pulse Averaging Methods for a Laser Remote Monitoring System Using Atmospheric Backscatter. Appl. Opt. 1987, 26, 2598–2603. [Google Scholar] [CrossRef]
- Grant, W.B.; Brothers, A.M.; Bogan, J.R. Differential Absorption Lidar Signal Averaging. Appl. Opt. 1988, 27, 1934–1938. [Google Scholar] [CrossRef]
- Lindström, T.; Holst, U.; Weibring, P.; Edner, H. Analysis of Lidar Measurements Using Nonparametric Kernel Regression Methods. Appl. Phys. B 2002, 74, 155–165. [Google Scholar] [CrossRef]
- Lindström, T.; Holst, U.; Weibring, P. Analysis of Lidar Fields Using Local Polynomial Regression. Environmetrics 2005, 16, 619–634. [Google Scholar] [CrossRef]
- Innocenti, F.; Robinson, R.; Gardiner, T.; Howes, N.; Yarrow, N. Results from a Global Study Measuring Methane Emissions from Onshore LNG Facilities Using Differential Absorption Lidar (DIAL). in press.
- Bourn, M.; Robinson, R.; Innocenti, F.; Scheutz, C. Regulating Landfills Using Measured Methane Emissions: An English Perspective. Waste Manag. 2019, 87, 860–869. [Google Scholar] [CrossRef] [PubMed]
- United Nations the Paris Agreement. Available online: https://www.un.org/en/climatechange/paris-agreement (accessed on 24 March 2022).
- Global Methane Pledge. Available online: https://www.globalmethanepledge.org/ (accessed on 24 March 2022).
- Oil and Gas Methane Partnership (OGMP) 2.0 Framework. Available online: https://www.ccacoalition.org/en/resources/oil-and-gas-methane-partnership-ogmp-20-framework (accessed on 24 March 2022).
- Howes, N.; Finlayson, A.; Smith, T.; Innocenti, F.; Robinson, R.A. Final Report on cen/tc264/wg38 Stationary Source Emissions—Standard Method to Determine Fugitive and Diffuse Emissions of Volatile Organic Compounds in the Atmosphere. Available online: https://www.vdi.de/fileadmin/pages/vdi_de/redakteure/ueber_uns/fachgesellschaften/KRdL/dateien/WG_38_Final_Report_SACEN2014-07.pdf (accessed on 24 March 2022).
- Babilotte, A.; Lagier, T.; Fiani, E.; Taramini, V. Fugitive Methane Emissions from Landfills: Field Comparison of Five Methods on a French Landfill. J. Environ. Eng.-ASCE 2010, 136, 777–784. [Google Scholar] [CrossRef]
- Babilotte Field Intercomparisons of Methods to Measure Fugitive Methane Emissions. Available online: https://erefdn.org/field-intercomparisons-of-methods-to-measure-fugitive-methane-emissions/ (accessed on 24 March 2022).
- Pikelnaya, O.; Polidori, A.; Tisopulos, L. Controlled Release. Available online: http://www.aqmd.gov/ors-study/controlled-release (accessed on 24 March 2022).
- Gardiner, T.; Helmore, J.; Innocenti, F.; Robinson, R. Field Validation of Remote Sensing Methane Emission Measurements. Remote Sens. 2017, 9, 956. [Google Scholar] [CrossRef]
- Rye, B.J. Differential Absorption Lidar System Sensitivity with Heterodyne Reception. Appl. Opt. AO 1978, 17, 3862–3864. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| l | Methane | Ethane | VOC | Units | |
|---|---|---|---|---|---|
| usys(C(x)) | 45 m | 92 | 22 | 37 | ppb |
| usys(M(x)) | 45 m | 0.6 | 0.3 | 1.1 | kg/h |
| usys(M(x)) | 30 m | 0.3 | 0.2 | 0.6 | kg/h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Innocenti, F.; Gardiner, T.; Robinson, R. Uncertainty Assessment of Differential Absorption Lidar Measurements of Industrial Emissions Concentrations. Remote Sens. 2022, 14, 4291. https://doi.org/10.3390/rs14174291
Innocenti F, Gardiner T, Robinson R. Uncertainty Assessment of Differential Absorption Lidar Measurements of Industrial Emissions Concentrations. Remote Sensing. 2022; 14(17):4291. https://doi.org/10.3390/rs14174291
Chicago/Turabian StyleInnocenti, Fabrizio, Tom Gardiner, and Rod Robinson. 2022. "Uncertainty Assessment of Differential Absorption Lidar Measurements of Industrial Emissions Concentrations" Remote Sensing 14, no. 17: 4291. https://doi.org/10.3390/rs14174291
APA StyleInnocenti, F., Gardiner, T., & Robinson, R. (2022). Uncertainty Assessment of Differential Absorption Lidar Measurements of Industrial Emissions Concentrations. Remote Sensing, 14(17), 4291. https://doi.org/10.3390/rs14174291