
Monitoring the Spring Flood in Lena Delta with Hydrodynamic Modeling Based on SAR Satellite Products

 , , ,
, , , 
Abstract
:1. Introduction
2. Materials and Methods
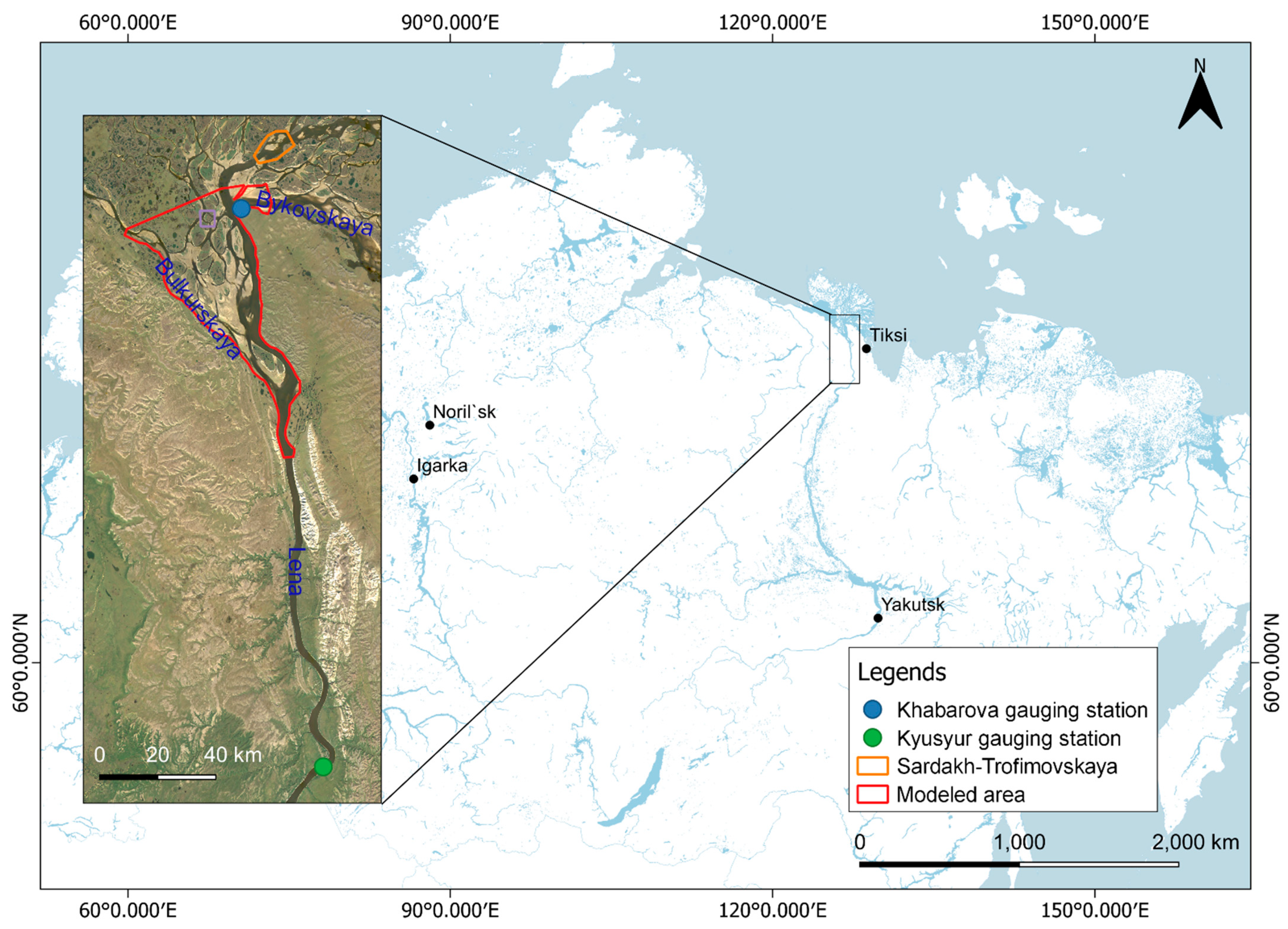
2.1. Study Site
2.2. Data
2.2.1. Remotely Sensed Datasets
2.2.2. Field Datasets
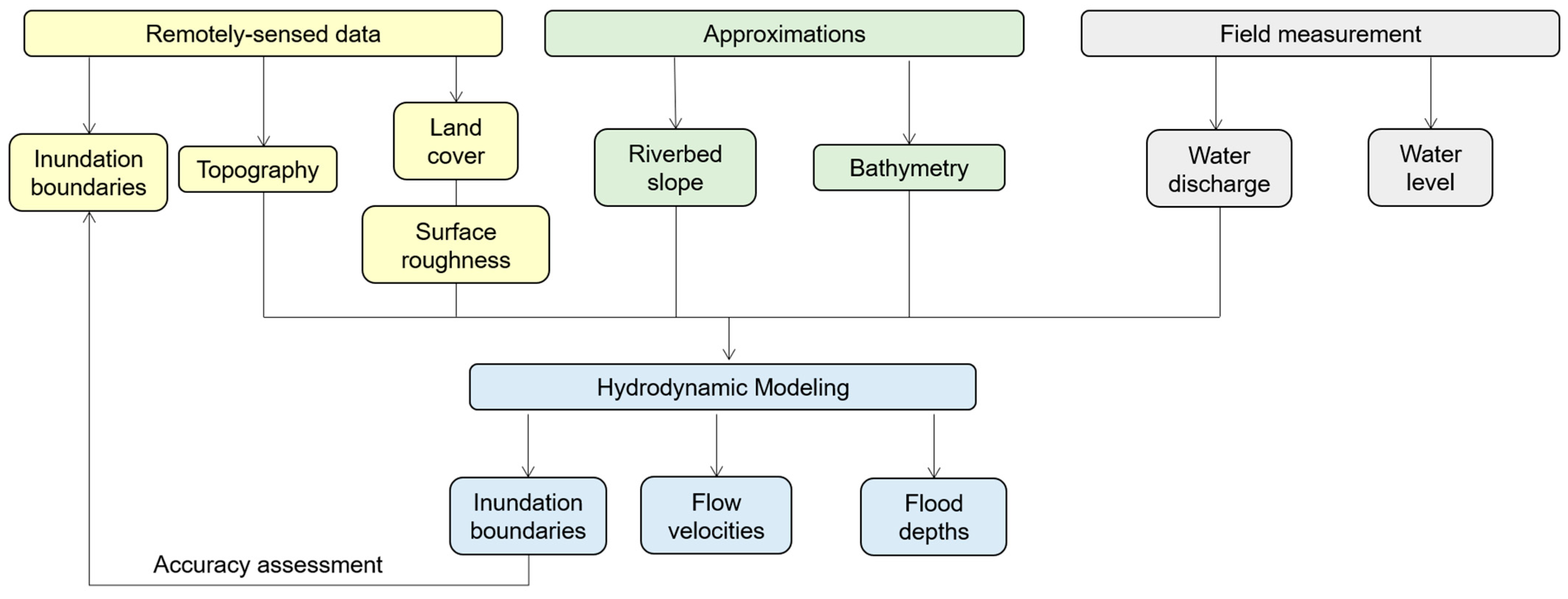
2.3. Methodology
2.3.1. Remote Sensing Methods
Image Pre-Processing
Inundation Boundary Mapping
Land Cover Classification and Manning’s Surface Roughness Coefficient Estimation
Bathymetry Estimation
The Geospatial Dataset Conversion
2.3.2. Hydrodynamic Modeling
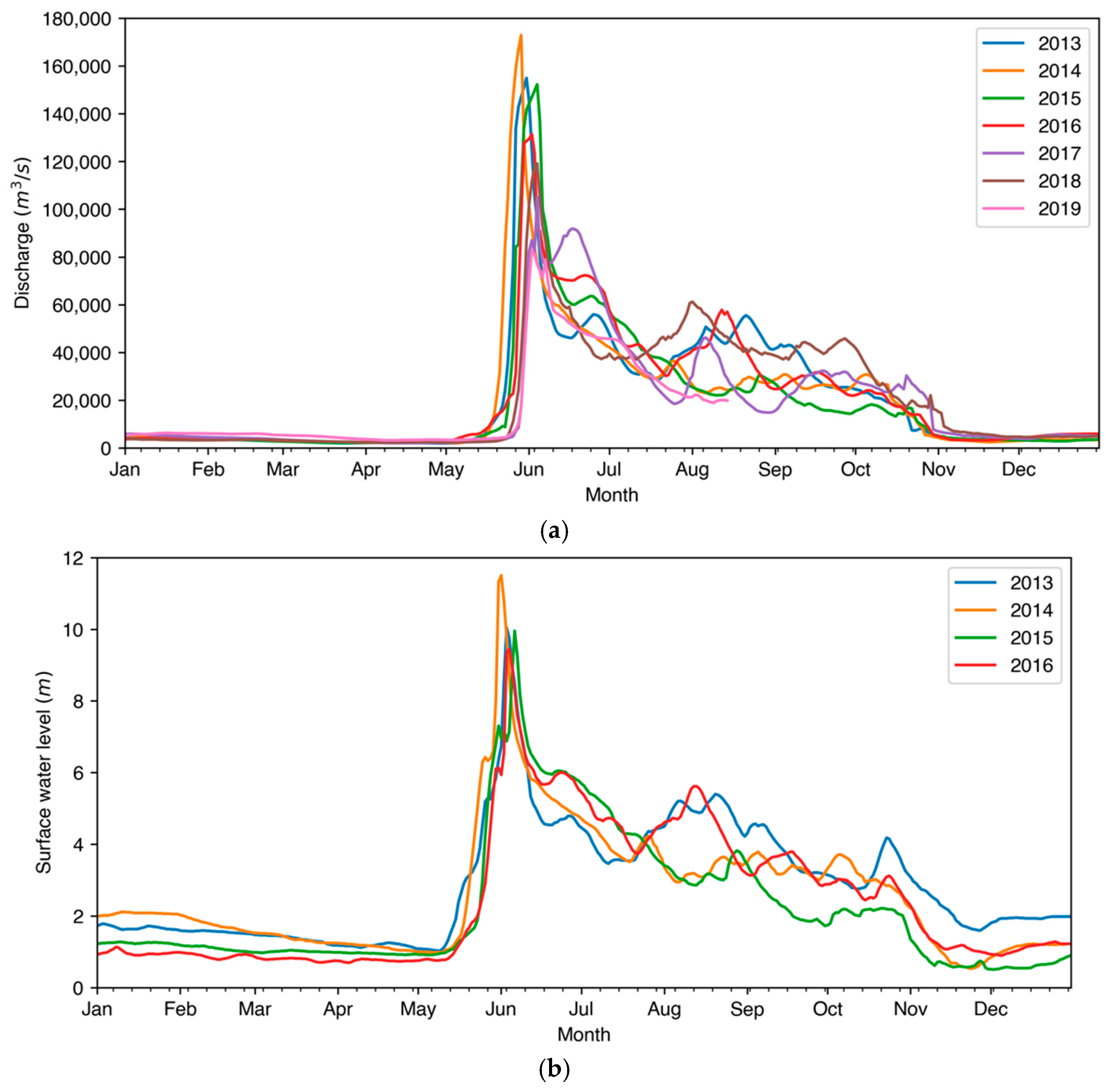
Flow Data
Model Setup
Model Accuracy Assessments
3. Results
3.1. Pre-Modeling Results
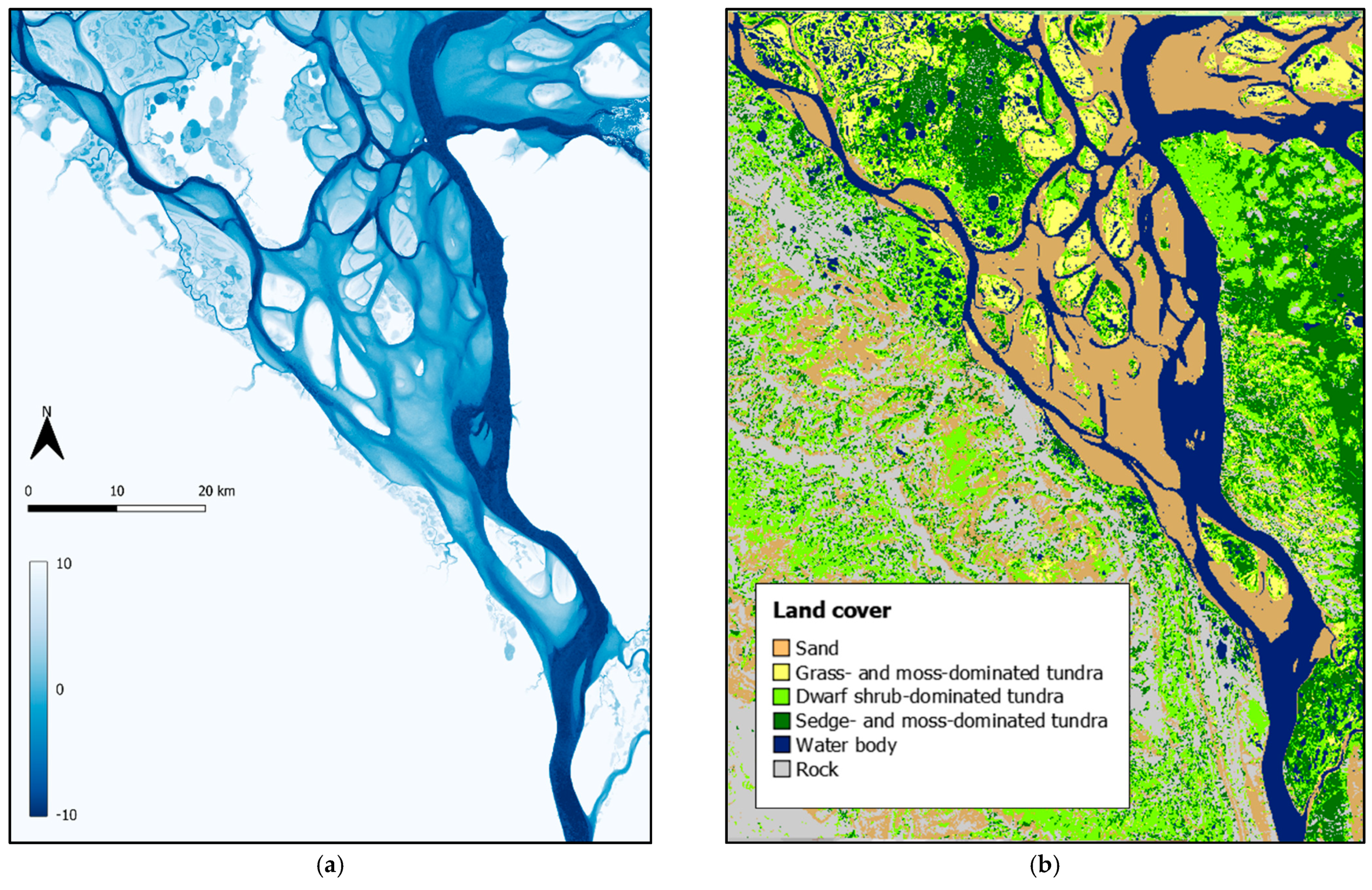
3.1.1. Estimated Bathymetry
3.1.2. Land Cover Map and Manning’s Surface Roughness Coefficient
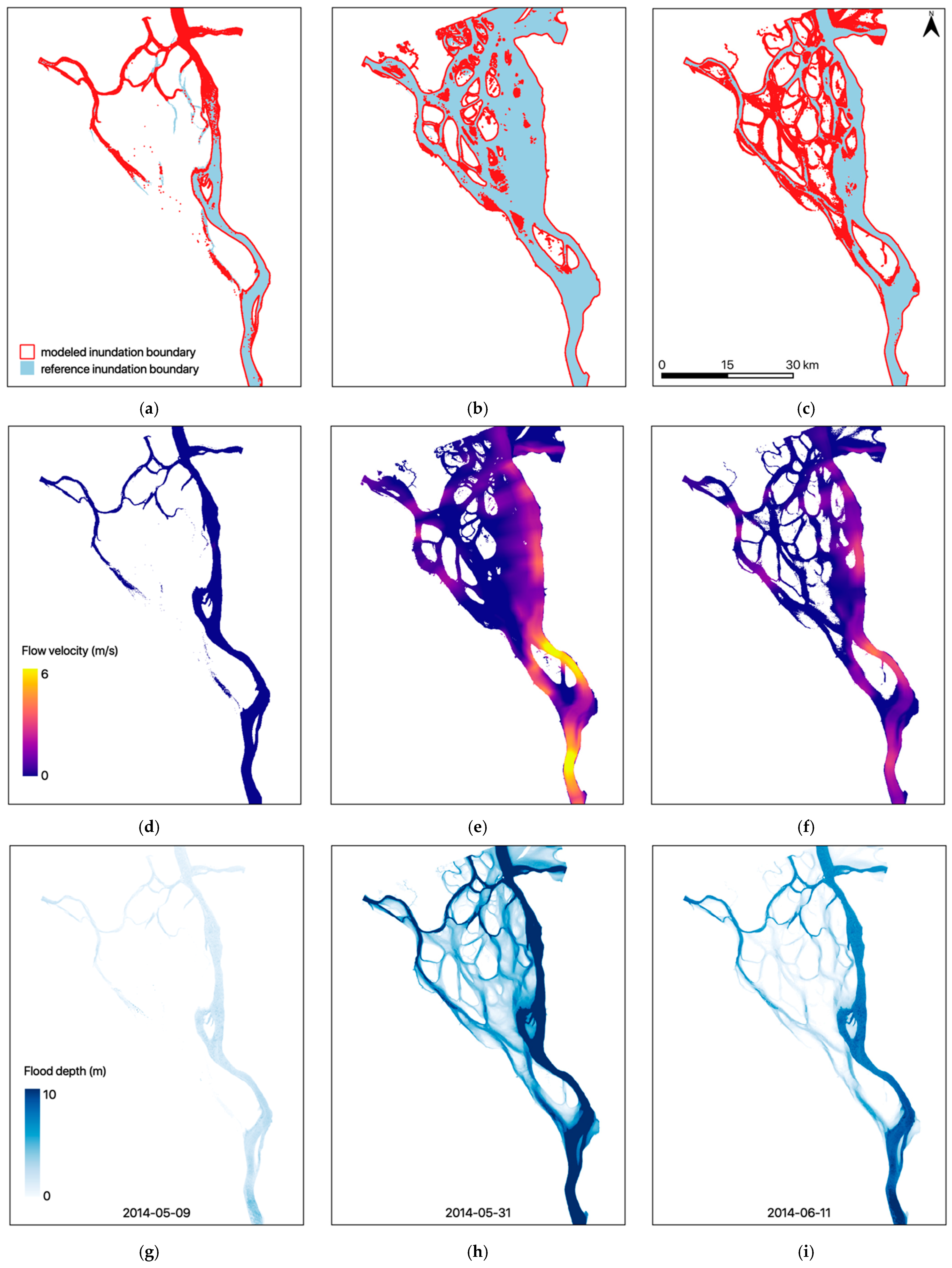
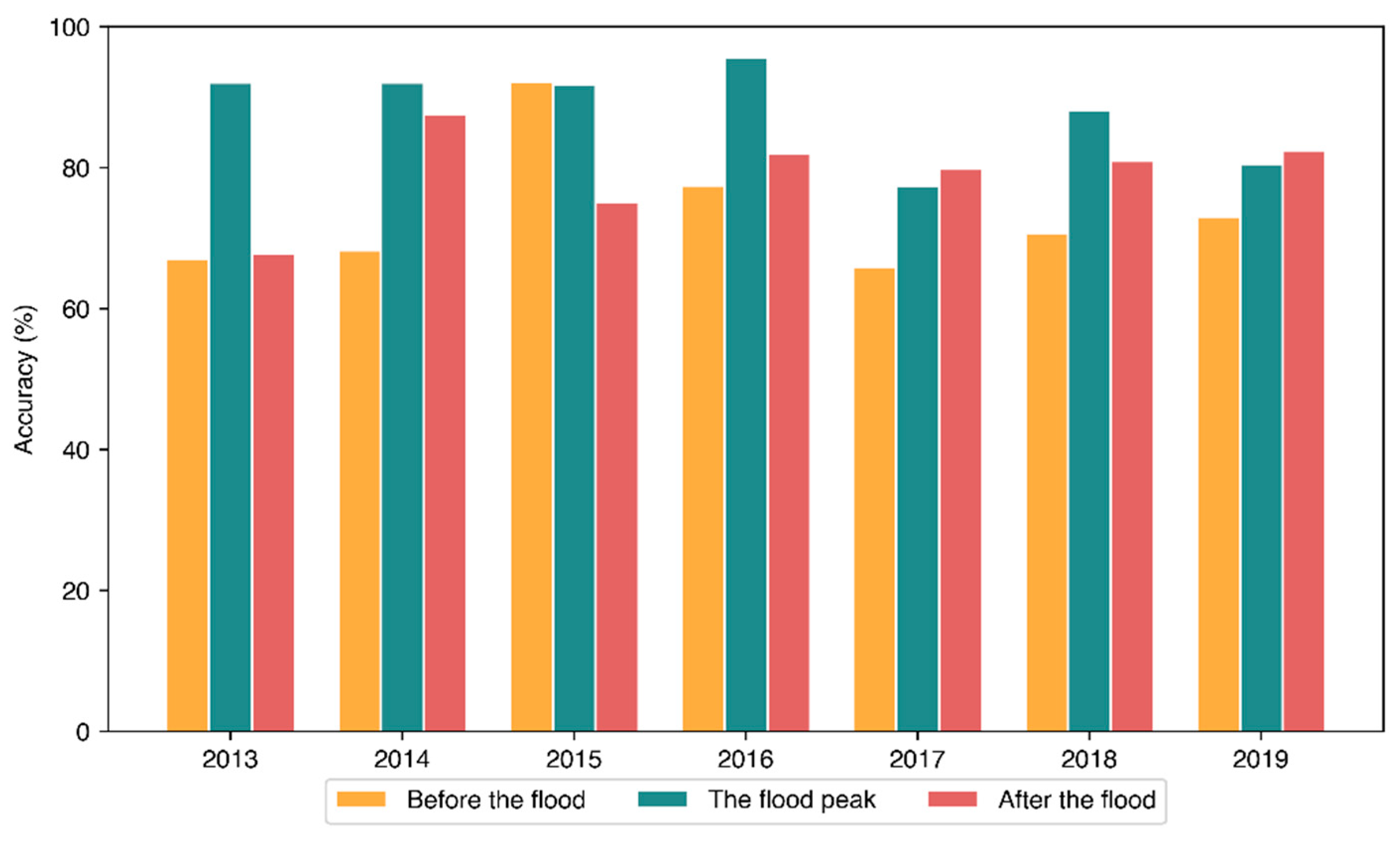
3.2. Model Accuracy Assessments with Inundation Boundaries
3.3. Modeling Results
3.3.1. Flood Depth
3.3.2. Flow Velocity
4. Discussions
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Vuglinsky, V.S. Peculiarities of ice events in Russian Arctic rivers. Hydrol. Process. 2002, 16, 905–913. [Google Scholar] [CrossRef]
- Papa, F.; Prigent, C.; Rossow, W.B. Monitoring Flood and Discharge Variations in the Large Siberian Rivers From a Multi-Satellite Technique. Surv. Geophys. 2008, 27, 297–317. [Google Scholar] [CrossRef]
- Peterson, B.J.; Holmes, R.M.; McClelland, J.W.; Vörösmarty, C.J.; Lammers, R.B.; Shiklomanov, A.I.; Shiklomanov, I.A.; Rahmstorf, S. Increasing River Discharge to the Arctic Ocean. Science 2002, 298, 2171–2173. [Google Scholar] [CrossRef] [Green Version]
- Pavelsky, T.M.; Smith, L.C. Spatial and temporal patterns in Arctic river ice breakup observed with MODIS and AVHRR time series. Remote Sens. Environ. 2004, 93, 328–338. [Google Scholar] [CrossRef]
- Sakai, T.; Hatta, S.; Okumura, M.; Hiyama, T.; Yamaguchi, Y.; Inoue, G. Use of Landsat TM/ETM+ to monitor the spatial and temporal extent of spring breakup floods in the Lena River, Siberia. Int. J. Remote Sens. 2015, 36, 719–733. [Google Scholar] [CrossRef]
- Spence, C.; Saso, P.; Rausch, J. Quantifying the Impact of Hydrometric Network Reductions on Regional Streamflow Prediction in Northern Canada. Can. Water Resour. J. Rev. Can. Des. Ressour. Hydr. 2007, 32, 1–32. [Google Scholar] [CrossRef]
- Smith, L.C.; Pavelsky, T.M. Estimation of river discharge, propagation speed, and hydraulic geometry from space: Lena River, Siberia. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Kääb, A.; Lamare, M.; Abrams, M. River ice flux and water velocities along a 600 km-long reach of Lena River, Siberia, from satellite stereo. Hydrol. Earth Syst. Sci. 2013, 17, 4671–4683. [Google Scholar] [CrossRef] [Green Version]
- Baghdadi, N.; Camus, P.; Beaugendre, N.; Issa, O.; Zribi, M.; Franç Ois Desprats, J.; Rajot, J.; Abdallah, C.; Sannier, C. Estimating Surface Soil Moisture from TerraSAR-X Data over Two Small Catchments in the Sahelian Part of Western Niger. Remote Sens. 2011, 3, 1266–1283. [Google Scholar] [CrossRef] [Green Version]
- Bachofer, F.; Quénéhervé, G.; Hochschild, V.; Maerker, M. Multisensoral Topsoil Mapping in the Semiarid Lake Manyara Region, Northern Tanzania. J. Remote Sens. 2015, 7, 9563–9586. [Google Scholar] [CrossRef] [Green Version]
- Aubert, M.; Baghdadi, N.; Zribi, M.; Douaoui, A.; Loumagne, C.; Baup, F.; El Hajj, M.; Garrigues, S. Analysis of TerraSAR-X data sensitivity to bare soil moisture, roughness, composition and soil crust. Remote Sens. Environ. 2011, 115, 1801–1810. [Google Scholar] [CrossRef] [Green Version]
- Sadeh, Y.; Cohen, H.; Maman, S.; Blumberg, D.G. Evaluation of Manning’s n Roughness Coefficient in Arid Environments by Using SAR Backscatter. Remote Sens. 2018, 10, 1505. [Google Scholar] [CrossRef] [Green Version]
- Heimhuber, V. GIS Based Flood Modeling as Part of an Integrated Development Strategy for Informal Settlements. Master’s Thesis, TU Munich, Munich, Germany, December 2013. [Google Scholar]
- Krötzinger, W. Flash Flood Modeling and Sediment Analysis for the Evaluation of Mitigation Measures at an Ephemeral Stream in Canaan, Haiti. Master’s Thesis, TU Munich, Munich, Germany, July 2015. [Google Scholar]
- Hong Quang, N.; Tuan, V.A.; Thi Thu Hang, L.; Manh Hung, N.; Thi The, D.; Thi Dieu, D.; Duc Anh, N.; Hackney, C.R. Hydrological/Hydraulic Modeling-Based Thresholding of Multi SAR Remote Sensing Data for Flood Monitoring in Regions of the Vietnamese Lower Mekong River Basin. Water 2020, 12, 71. [Google Scholar] [CrossRef] [Green Version]
- Wohlfart, C.; Winkler, K.; Wendleder, A.; Roth, A. TerraSAR-X and Wetlands: A Review. Remote Sens. 2018, 10, 916. [Google Scholar] [CrossRef] [Green Version]
- Antonova, S.; Kääb, A.; Heim, B.; Langer, M.; Boike, J. Spatio-temporal variability of X-band radar backscatter and coherence over the Lena River Delta, Siberia. Remote Sens. Environ. 2016, 182, 169–191. [Google Scholar] [CrossRef]
- Stettner, S.; Beamish, A.L.; Bartsch, A.; Heim, B.; Grosse, G.; Roth, A.; Lantuit, H. Monitoring Inter- and Intra-Seasonal Dynamics of Rapidly Degrading Ice-Rich Permafrost Riverbanks in the Lena Delta with TerraSAR-X Time Series. Remote Sens. 2018, 10, 51. [Google Scholar] [CrossRef] [Green Version]
- Schumann, G.; Bates, P.; Horritt, M.; Matgen, P.; Pappenberger, F. Progress in integration of remote sensing-derived flood extent and stage and hydraulic models. Rev. Geophys 2009, 47. [Google Scholar] [CrossRef]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Liu, Z.; Merwade, V.; Jafarzadegan, K. Investigating the role of model structure and surface roughness in generating flood inundation extents using one- and two-dimensional hydraulic models. J. Flood Risk Manag. 2019, 12, e12347. [Google Scholar] [CrossRef] [Green Version]
- Caruso, B.; Ross, A.; Shuker, C.; Davies, T. Flood Hydraulics and Impacts on Invasive Vegetation in a Braided River Floodplain, New Zealand. Environ. Nat. Resour. Res. 2013, 3. [Google Scholar] [CrossRef] [Green Version]
- ESA. Lena River Delta. Available online: http://www.esa.int/ESA_Multimedia/Images/2019/06/Lena_River_Delta (accessed on 13 November 2019).
- Ma, X.; Yasunari, T.; Ohata, T.; Fukushima, Y. The influence of river ice on spring runoff in the Lena river, Siberia. Ann. Glaciol. 2005, 40, 123–127. [Google Scholar] [CrossRef] [Green Version]
- ArcticGRO. Arctic Great Rivers. Available online: https://arcticgreatrivers.org/rivers/ (accessed on 23 May 2019).
- Minprirody. Automated Information System for State Monitoring of Water Bodies (Translated from Russian). Available online: https://gmvo.skniivh.ru/ (accessed on 23 May 2019).
- Fedorova, I.; Chetverova, A.; Bolshiyanov, D.; Makarov, A.; Boike, J.; Heim, B.; Morgenstern, A.; Overduin, P.P.; Wegner, C.; Kashina, V.; et al. Lena Delta hydrology and geochemistry: Long-term hydrological data and recent field observations. Biogeosciences 2015, 12, 345–363. [Google Scholar] [CrossRef] [Green Version]
- Schneider, J.; Grosse, G.; Wagner, D. Land cover classification of tundra environments in the Arctic Lena Delta based on Landsat 7 ETM+ data and its application for upscaling of methane emissions. Remote Sens. Environ. 2009, 113, 380–391. [Google Scholar] [CrossRef] [Green Version]
- Heim, B. Lena Delta Land Cover Roughness. 2019. [Google Scholar]
- Global Administrative Areas. GADM Database of Global Administrative Areas, Version 2.0. Available online: https://gadm.org (accessed on 18 November 2021).
- AIRBUS. TerraSAR-X Image Product Guide: Basic and Enhanced Radar Satellite Imagery; Airbus Defence and Space: Taufkirchen, Germany, 2015. [Google Scholar]
- Huber, M.; Osterkamp, N.; Marschalk, U.; Tubbesing, R.; Wendleder, A.; Wessel, B.; Roth, A. Shaping the Global High-Resolution TanDEM-X Digital Elevation Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 7198–7212. [Google Scholar] [CrossRef]
- EOC, G. The TanDEM-X 90m Digital Elevation Model. Available online: https://geoservice.dlr.de/web/dataguide/tdm90/ (accessed on 29 April 2019).
- DLR. RapidEye. Available online: https://www.dlr.de/rd/en/desktopdefault.aspx/tabid-2440/3586_read-5336/ (accessed on 15 July 2019).
- USGS. Landsat Missions: Landsat 8. Available online: https://www.usgs.gov/land-resources/nli/landsat/landsat-8 (accessed on 23 May 2019).
- USGS. EarthExplorer—Home. Available online: https://earthexplorer.usgs.gov/ (accessed on 20 May 2019).
- Holmes, R.M.; McClelland, J.W.; Tank, S.E.; Spencer, R.G.M.; Shiklomanov, A.I. Arctic Great Rivers Observatory. Water Quality Dataset, Version 20190709. Available online: https://www.arcticgreatrivers.org/data (accessed on 23 May 2019).
- Schmitt, A.; Wendleder, A.; Hinz, S. The Kennaugh element framework for multi-scale, multi-polarized, multi-temporal and multi-frequency SAR image preparation. ISPRS J. Photogramm. Remote Sens. 2015, 102, 122–139. [Google Scholar] [CrossRef] [Green Version]
- ESRI. How Iso Cluster Works. Available online: http://desktop.arcgis.com/en/arcmap/10.3/tools/spatial-analyst-toolbox/how-iso-cluster-works.htm (accessed on 6 October 2019).
- Breiman, L. Random Forest. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Chow, V.T. Open-Channel Hydraulics; McGraw-Hill Book Co.: New York, NY, USA, 1959. [Google Scholar]
- Leopold, L.B.; Thomas, M., Jr. The Hydraulic Geometry of Stream Channels and Some Physiographic Implications; United States Government Printing Office: Washington, DC, USA, 1953.
- Mersel, M.K.; Smith, L.C.; Andreadis, K.M.; Durand, M.T. Estimation of river depth from remotely sensed hydraulic relationships. Water Resour. Res. 2013, 49, 3165–3179. [Google Scholar] [CrossRef] [Green Version]
- Domeneghetti, A. On the use of SRTM and altimetry data for flood modeling in data sparse regions. Water Resour. Res. 2016, 52, 2901–2918. [Google Scholar] [CrossRef] [Green Version]
- Stumpf, R.P.; Holderied, K. Determination of water depth with high-resolution satellite imagery over variable bottom types. Am. Soc. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef]
- Thomas, N.; Pertiwi, A.P.; Traganos, D.; Lagomasino, D.; Poursanidis, D.; Moreno, S.; Fatoyinbo, L. Space-Borne Cloud-Native Satellite-Derived Bathymetry (SDB) Models Using ICESat-2 And Sentinel-2. Geophys. Res. Lett. 2021, 48, e2020GL092170. [Google Scholar] [CrossRef]
- Chow, V.T.; Maidment, D.R.; Mays, L.W. Applied Hydrology; McGraw-Hill: New York, NY, USA, 1988. [Google Scholar]
- Brunner, G.W. HEC-RAS River Analysis System: Hydraulic Reference Manual; US Army Corps of Engineers: Washington, DC, USA, 2016. [Google Scholar]
- Samuels, P.G. Backwater lengths in rivers. Proc. Inst. Civ. Eng. 1989, 87, 571–582. [Google Scholar] [CrossRef]
- Fedorova, I. Personal communication, 23 April 2020.
- Parhi, P.K. HEC-RAS Model for Mannnigs Roughness: A Case Study. Open J. Mod. Hydrol. 2013, 3, 5. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhang, J.M.; Xu, W.L.; Wang, Y.R.; Peng, Y.; Li, J.N.; He, X.L.; Li, P. Sensitivity Analysis of Parameters in HEC-RAS Software. Appl. Mech. Mater. 2014, 641–642, 201–204. [Google Scholar] [CrossRef]
- Praskievicz, S.; Carter, S.; Dhondia, J.; Follum, M. Flood-inundation modeling in an operational context: Sensitivity to topographic resolution and Manning’s n. J. Hydroinform. 2020, 22, 1338–1350. [Google Scholar] [CrossRef]
- Ab Ghani, A.; Zakaria, N.; Chang, C.K.; Ariffin, J.; Abu Hasan, Z.; Ghaffar, A. Revised equations for Manning’s coefficient for Sand-Bed Rivers. Int. J. River Basin Manag. 2007, 5, 329–346. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite Mission | Product Name | Derived Hydrodynamic Parameter(s) | Swath Width | Spatial Resolution | Revisit Cycle | Number of Scenes |
|---|---|---|---|---|---|---|
| TerraSAR-X/TanDEM-X (TSX/TDX) | Stripmap |
| 17 km | 5 m | 11 days | 38 |
| TerraSAR-X/TanDEM-X (TSX/TDX) | Digital Elevation Model (DEM) | Topography | - | 5 m (resampled from 12.5 m) | - | 1 |
| RapidEye (RE) | Ortho—Level 3A | Land cover for surface roughness estimation | 77 km | 5 m | 5.5 days | 1 |
| Landsat 8 (LS8) | Level 2 Surface Reflectance | Land cover for surface roughness estimation | 185 km | 30 m | 16 days | 1 |
| No | Land Cover Class | Manning’s Roughness Coefficient |
|---|---|---|
| 1 | Sandy floodplain | 0.048 |
| 2 | Grass- and moss-dominated tundra | 0.060 |
| 3 | Dwarf-shrub-dominated tundra | 0.070 |
| 4 | Sedge- and moss-dominated tundra | 0.150 |
| 5 | Sandy riverbed | 0.030 |
| 6 | Rock | 0.040 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pertiwi, A.P.; Roth, A.; Schaffhauser, T.; Bhola, P.K.; Reuß, F.; Stettner, S.; Kuenzer, C.; Disse, M. Monitoring the Spring Flood in Lena Delta with Hydrodynamic Modeling Based on SAR Satellite Products. Remote Sens. 2021, 13, 4695. https://doi.org/10.3390/rs13224695
Pertiwi AP, Roth A, Schaffhauser T, Bhola PK, Reuß F, Stettner S, Kuenzer C, Disse M. Monitoring the Spring Flood in Lena Delta with Hydrodynamic Modeling Based on SAR Satellite Products. Remote Sensing. 2021; 13(22):4695. https://doi.org/10.3390/rs13224695
Chicago/Turabian StylePertiwi, Avi Putri, Achim Roth, Timo Schaffhauser, Punit Kumar Bhola, Felix Reuß, Samuel Stettner, Claudia Kuenzer, and Markus Disse. 2021. "Monitoring the Spring Flood in Lena Delta with Hydrodynamic Modeling Based on SAR Satellite Products" Remote Sensing 13, no. 22: 4695. https://doi.org/10.3390/rs13224695
APA StylePertiwi, A. P., Roth, A., Schaffhauser, T., Bhola, P. K., Reuß, F., Stettner, S., Kuenzer, C., & Disse, M. (2021). Monitoring the Spring Flood in Lena Delta with Hydrodynamic Modeling Based on SAR Satellite Products. Remote Sensing, 13(22), 4695. https://doi.org/10.3390/rs13224695