1. Introduction
The success of airborne laser scanning (ALS) on collecting accurate measurements of forest ecosystems consolidated this technique worldwide as a state-of-the-art approach in forest inventories. The term ALS refers to light detection and ranging system (LiDAR) onboard an aerial platform, aiming to quickly scan large areas to produce detailed three-dimensional point clouds of the surface [
1,
2]. These characteristics allow the ALS data to be used for many purposes including topographic- and forest-related studies [
3,
4,
5]. Among the forest-oriented applications, the area-based approach (ABA) has been widely applied to estimate forest attributes, where the tree dominant height and growing stock volume are commonly targeted [
6,
7,
8]. However, the interpretation of ALS data requires successive steps to process, filter and re-scale the information. The calibration of the algorithms used on each step during the processes can turn into a prohibitively time-consuming operation for the users. Furthermore, the experience in handling of the ALS data is essential to properly assess the calibration of the algorithms when it comes, for instance, to generate the digital terrain model (DTM).
Despite the many developments related to the ALS data processing, ground point filtering is a critical procedure for deriving DTM [
9], and it is necessary to classify raw ALS returns as coming from the ground or non-ground. Once the ground returns are interpolated to build the DTM (see [
10]), the point cloud is normalized in a process by which the Z coordinates of all non-ground returns are re-scaled to above-ground elevation. In the case of the ABA, several metrics are extracted from the normalized point cloud and used to estimate the forest attributes (see, for example, [
11]). Thus, the DTM has a great influence on the computation of ALS metrics and consequently on the statistical modeling based on ABA, so the filtering process can be regarded as the cornerstone step in the data processing when using ALS in forest inventory.
Great efforts have been made to develop enhanced filtering algorithms [
12]. Besides the quality of the filtering, the usability of an algorithm is partially related to its availability on the ALS-oriented processing software. Among the most common filtering algorithms available, good solutions have been reported when using progressive triangulated irregular network (PTIN, [
13]), weighted linear least-squares interpolation (WLS, [
14]), multiscale curvature classification (MCC, [
15]), or the progressive morphological filter (PMF, [
16]).
The performance of the above-mentioned methods has been tested in forest areas where the results point to a higher discrepancy among filters as the terrain becomes steep and as the undergrowth increases [
17,
18,
19]. This fact is common in other benchmarks, which shows the higher difference among the filter efficiencies as the terrain complexity increases [
20,
21,
22,
23,
24,
25]. As presented by Montealegre et al. [
26], the steeped slopes affect the way the filters recognize the returns belonging to the vegetation from ones coming from the ground, causing excessive removal of returns and reducing the details of the ground surfaces. Another source of errors in the filtering process is caused by the border effect, which is the misclassification of returns on the border of the dataset due to the lack of returns outside the boundary [
21]. Consequently, many returns in the border are removed causing an erosion in the DTM, so that it cannot extend above all non-ground returns. In this regard, the interpolation process of ground returns located on the edge of the ALS coverage is challenging and can substantially impact the quality of the ALS-based inventory workflow.
The filter calibration is often required to improve the filtering performance, where trial and error are the most common praxis. Using and calibrating a filtering algorithm can involve several parameters that may require considerable knowledge from forest practitioners along a tedious and time-consuming process. Many benchmark studies applied parameters calibration to compare filters [
18,
26], but the practical effects of the calibration on the accuracy of the DTM and the forest attribute estimation are still unknown. This understanding would be valuable for ALS users by supporting them during the data processing to produce the DTM, especially when the forest characterization is the goal.
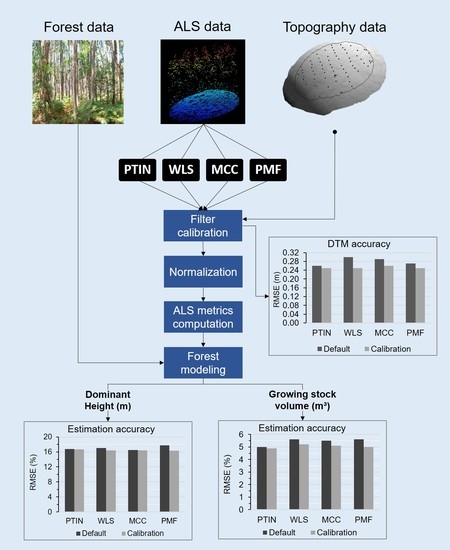
The aims of this study are: i) To assess the calibration of four filtering algorithms (PTIN, WLS, MCC, and PMF) commonly used in ALS-based forest inventory; ii) to evaluate the impact of the calibration on the DTM quality and forest modeling, particularly for plot growing stock volume and dominant height estimation. The analysis was oriented to the forest data users or the ones who need to process ALS data of forested areas. We applied alternative combinations of parameter values for each tested algorithm in the software implementation, and the different parameters were calibrated according to the accuracy of the DTM derived from the filtered ground returns. More than 3000 ground control points were used to assess the quality of the produced DTM. The effect of calibrating the filters was traced from the DTM generation to its impact on the performance of the models, where the multiple linear regression approach and a eucalyptus forest plantation was used as showcase.
4. Discussion
This study demonstrated that a DTM derived from ALS is more accurate when the parameters of the filtering process are calibrated. The DTM produced with the WLS was the most affected by the calibration, followed by that of the MCC, PMF and of the PTIN (less affected). This fact influenced the estimation of forest attributes, especially for dominant height. Except for PTIN, the estimation of the dominant height derived by using the calibrated parameter values was significantly more accurate than those that are derived with the default ones. In the case of the volume estimation, the calibration of WLS and PFM derived equations with significantly better accuracies, contrary to the PTIN and MCC filters that performed comparably when using calibrated and default parameter values.
The lower effect of the calibration for PTIN is justified by the similarity between the calibrated and the default parameters values, which differs only by 0.5 in the
spike parameter value (see
Table 2 and
Table 4). The calibrated parameters for the MCC differed the most with respect to the default ones, having a large impact on the dominant height estimation as opposed to the volume estimation. The result shows that a DTM can have different impacts on the modeling of these forest attributes and that the calibration will lead to the best results depending on the filter and on the attribute to be estimated.
Although these two forest attributes are highly correlated, they present different aspects when are estimated through ALS data. Many works have reported good correlations between the tree height attributes with upper-tail percentiles of the height distribution of ALS returns [
59,
60]. The literature is less consensual for the case of the volume estimation, for which good performances are found based on ALS metrics associated to intermediary percentiles (higher than 50%), density metrics (e.g.,
C8) and/or height variability measures (e.g., height kurtosis) [
6,
44,
50]. These characteristics were also observed in our work, where the metric
Z95 appears in all dominant height equations just as the
Zmax and
C2 in the volume equations. However, studies focusing on the effect of point density over the metrics demonstrated that those ones related to the tail ends of the return distribution (e.g.,
C1 and
C9, or
Zmin and Z
max) are more sensible and, therefore, less stable [
61]. Despite the point density remaining constant in our analysis, it is possible that those same metrics are also more sensitive to variations in the normalized point cloud due to errors in the DTM. This fact is important in the case of ordinary least squares regression since the predictors are selected following several rules to match the regression assumptions, so small variations in the metric values have unpredictable effects in the final model.
It should be highlighted that the quality of the estimation of stand attributes is strongly dependent on the applied modeling approach [
52]. Nonparametric models, such as k-nearest neighbors or random forest, have the advantage of being distribution-free and are normally used with more predictor variables to improve their accuracy [
48,
62,
63]. In this case, it is reasonable to suspect that using more variables would turn the models less vulnerable against changes in the metrics and, thus, the effect of the filter calibration could be hidden by an improvement in the performance of the models. However, the non-parametric approaches require a higher amount of field data for the modeling, which is not often available (as is the case of this work). Besides, traditional parametric modeling approaches have shown to be less affected by biased normalized point clouds, for instance, due to co-registration errors, so that alternative combinations of ALS metrics models can result in similar estimative efficiency [
51]. The co-registration effect could be ignored in this work given the high-accurate plot positioning throughout the data collection; therefore, it corroborates that DTM quality is the major factor affecting the performances of the model in the benchmark.
The researches focused on calibration of the above tested filters are scarce in the literature and the few examples were oriented to digital aerial photogrammetry (DAP, [
64,
65]). One of them is the study of Graham et al. [
66] who analyzed the PTIN, WLS and the simple morphological filter (SMRF, see [
67]), which works similarly to the PMF. Their results share some similarities with ours: the PTIN was mostly affected by the
step size parameter, while the
spike had minor or no effects over the accuracy of the derived DTM; the WLS had the best accuracy with the |
g| close to
w; and low
threshold for the SMRF (analogous in PMF). On the other hand, the parameters related to the size of the search windows of these filters (i.e.,
window size and
step size) were exceptionally higher (≥17 m²). However, we have demonstrated that using larger values for these parameters over ALS point clouds increases the susceptibility of the filters to the border effect, resulting in eroded DTM.
The PTIN was also analyzed by Wallace et al. [
68] using DAP-based data, where the calibration was performed for different ecosystems. However, in contrast to the study of Wallace et al. [
68], our work did not distinguish the areas regarding the terrain conditions or forest covers due to a lack of data for this discretization, especially in the forest modeling assessment. Instead, the filters were analyzed considering all ALS data available so the results of the calibration can be applied to a wider range of forest conditions. Furthermore, many works have been applied the ABA to mountainous sites with success, demonstrating that the impact of the terrain slope over the forest attribute estimation is not significant as expected [
60,
69,
70], thereby it is unlikely that this effect can also compromise the performances of our forest models.
Most of the ground filtering benchmarks assess the accuracy through visual inspection of the filtered ground returns, which allows accounting for omission and commission errors of the filtering [
20,
21,
26]. Although such analysis produces detailed information about the filtering process, it is highly time-consuming and can be impracticable in terms of the calibration routines like the ones performed in this study. The analysis based on the quality of DTM is thus a good and practical alternative when high-accurate ground control data is available. Additionally, further benchmarks should also account for DTM erosion, since it is prohibitive when the goal is forest modeling.
Although this work did not aim at comparing filters, it should be highlighted that all tested filters had comparable performances after the calibration, considering the accuracy of the derived DTM. This fact suggests that more efforts should be given to calibrate the ground point filters instead of finding a better one. Therefore, the software developers must be encouraged to implement adaptive filters to reduce the number of parameters to be set to process the data (e.g., [
24,
71,
72]).
The improvement in the estimation of dominant height is of great importance for forest management since it ensures a more accurate analysis of forest site productivity [
59,
73]. Likewise, ALS-based models play a key role in the valuation of growing stock inventory [
74,
75], so reducing the errors of the estimated attributes by calibrating the filters allows increasing the liability of the assessments. However, ALS-data users must preliminarily consider the potential improvement on the DTM accuracy and forest attribute estimation before deciding to calibrate it instead of using the software’s default.
This work did not consider the impact of the errors originating from different interpolation methods on the accuracy of DTM nor on the forest attribute estimation. Previous studies demonstrated the difference among the efficiency of interpolators while deriving DTM from ALS data [
19,
47]; despite the TIN approach usually performed the best, Stereńczak et al. [
19] showed that the differences among the interpolators were reduced after calibration. Additionally, Graham et al. [
76] tested several interpolation methods using DAP-data and showed that they do not have significant differences regarding the accuracy of estimated forest attributes. The same may occur in the case of ALS-data, but proper research is needed to investigate such a hypothesis. Finally, our analysis was based on a massive ground control dataset that was collected using an exhaustive and high-accurate topographic survey, which supports the liability of the DTM accuracy assessment [
77]. For this reason, our results can be used as a rule of thumb and the information we provided from the filter calibration can guide the user during the ALS data processing, especially if the estimation of forest attributes is the goal.

 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}