A Novel Approach for Satellite-Based Turbulence Nowcasting for Aviation



Abstract
:
1. Introduction
2. Physical Basics Turbulence Scheme in the Current NWP Model ICON
α –Dissipation constant, ℓ – turbulence length scale
3. Methodology EDP from Motion Vector and Satellite Data
- Estimating the optical flow (AMV) for 6.2 and 7.3 µm MSG satellite water vapor channels from consecutive images (see Table 1).
- Determining the wind components (sx, sy) by a transformation of the AMV between the image coordinate system (pixel per seconds) and the geographical coordinate system (meter per seconds). The conversions result from the Equations (5) and (6). So, divergence and deformation can be computed in physical metrics (Equation (7)).
- Using the brightness temperatures (BT62, BT73) of the 6.2 and 7.3 µm water vapor channels (WV62, WV73) for the determination of vertical wind shear, static stability, and EDP (Equation (8)–(11)).
- Deriving the turbulence top height with the so-called H2O-intercept method (explanation in Chapter 4).
Δyij = rΔφ,
Dhij2 = Δxij Δyij
syij = uyijΔyij
DIVij= Δsxij/Δxij + Δsyij/Δyij
g-gravitational acceleration, cp-1005.7 J/kkg
4. Methodology Turbulence Top Height TTH
t= −((IR1·D1 − WV1·D2)/(D1 − D2) + 40)/33, D1 = 500(WV2 − WV1),
D2 = 500(IR2 − IR1)
5. Results Case Studies of Strong Aircraft Turbulence
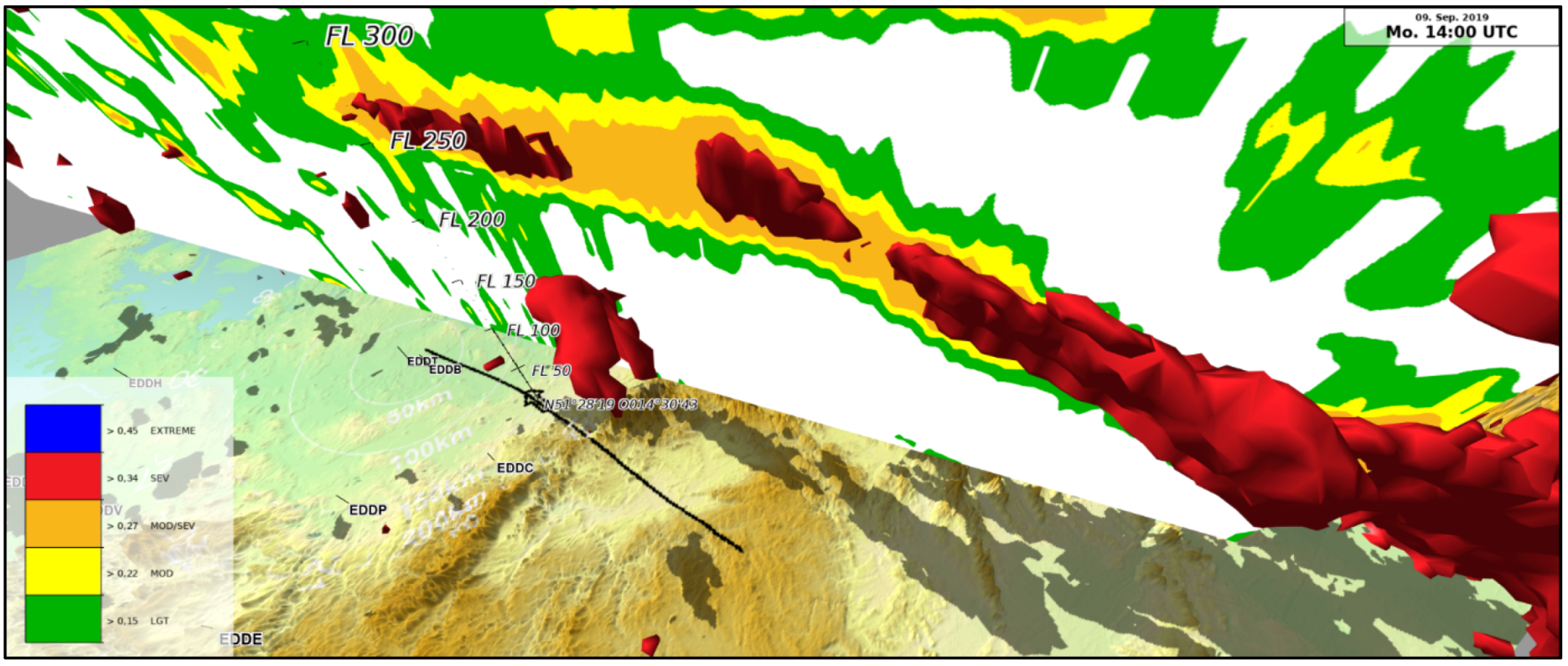
5.1. September 9, 2019: Airbus A319
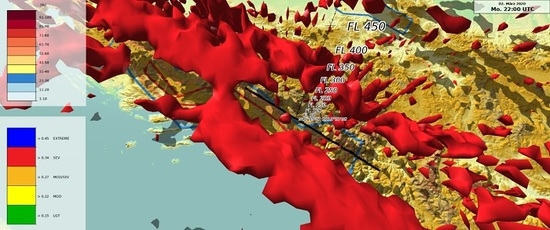
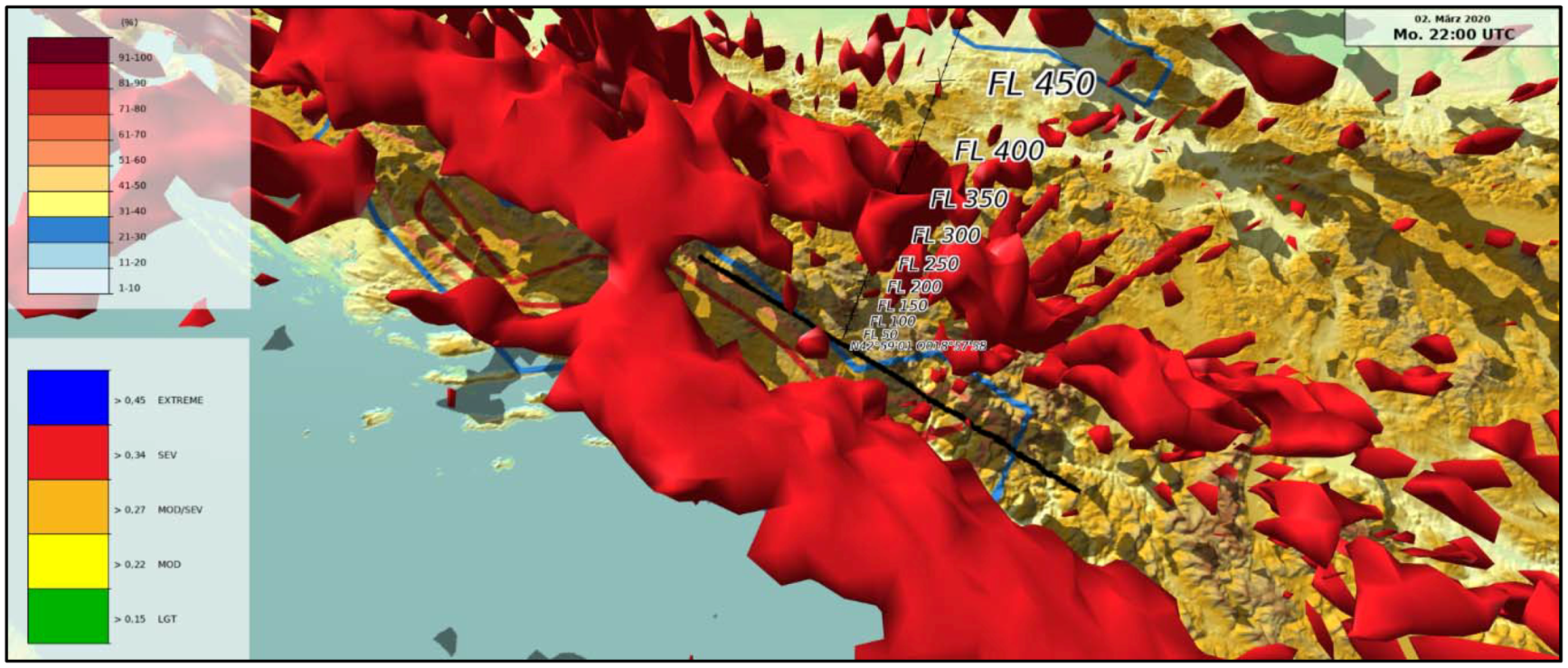
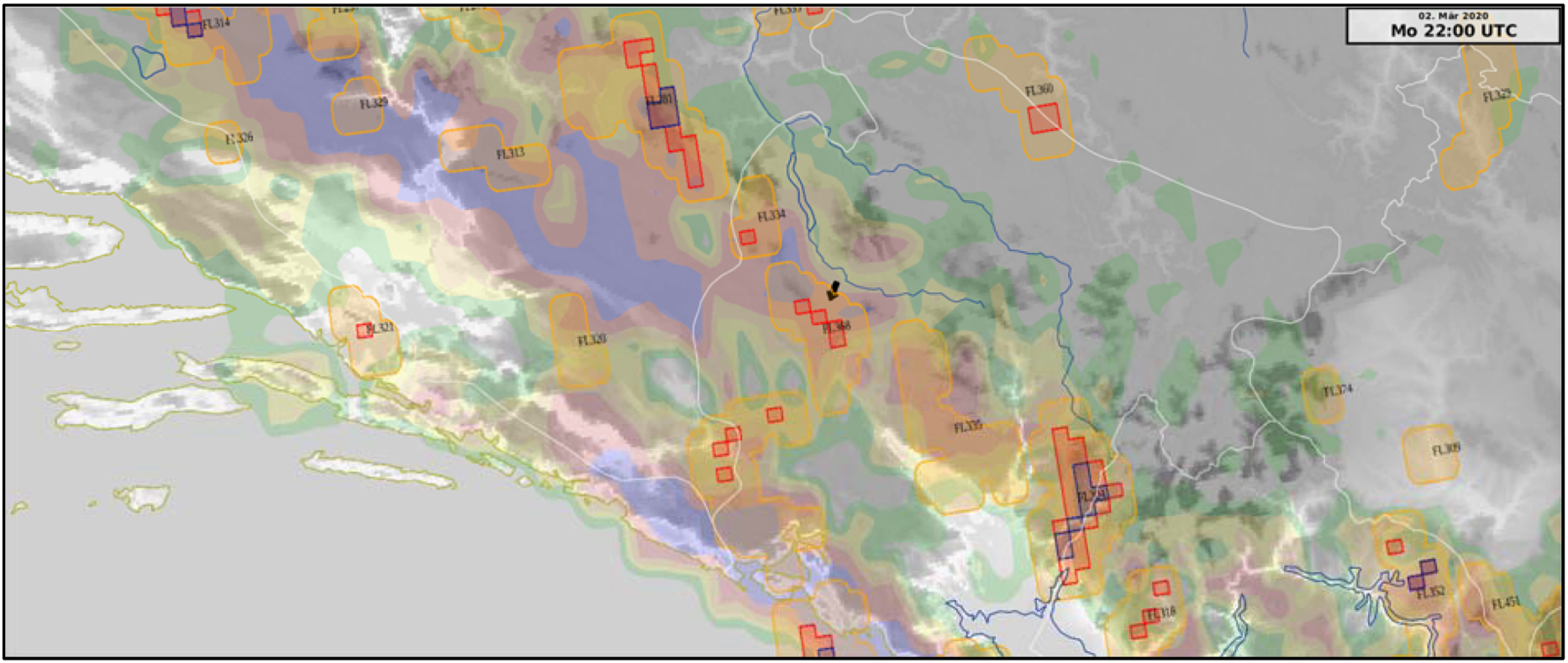
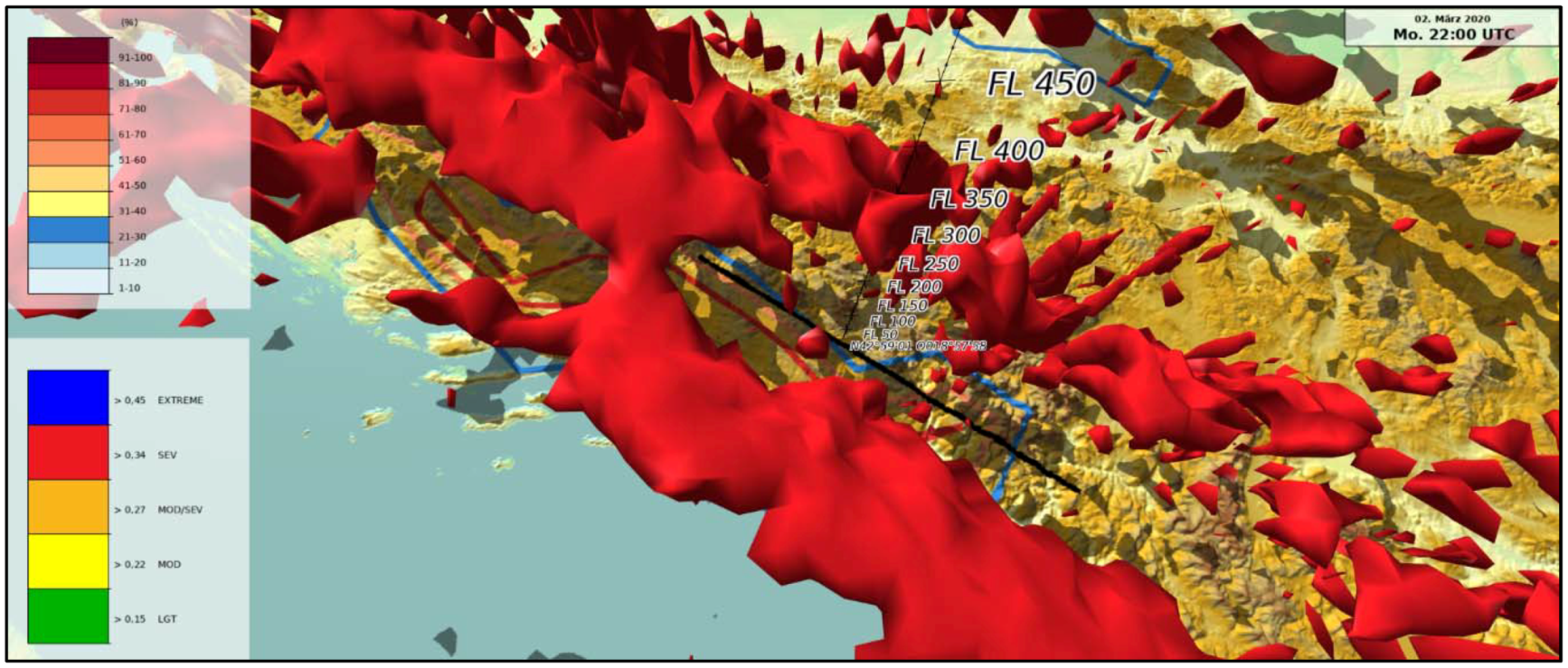
5.2. March 2, 2020: Airbus A320
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| AMV | atmospheric motion vector |
| BT | brightness temperature |
| CAT | clear-air turbulence |
| ICT | in-cloud turbulence |
| CIT | convectively induced turbulence |
| DLH | German Airline “Deutsche Lufthansa” |
| DWD | Deutscher Wetterdienst |
| EDP | Eddy Dissipation Parameter |
| EPS | ensemble prediction System |
| EU | Europe (domain) |
| FL | flight level |
| ICON | NWP model of Deutscher Wetterdienst (Icosahedral Nonhydrostatic) |
| IR | infrared (channel, e.g., 10.8 µm band) |
| MSG | Meteosat Second Generation |
| Meteosat | meteorological satellite |
| MWT | mountain wave turbulence |
| NWP | numerical weather prediction |
| SEVIRI | spinning enhanced visible and infrared imager |
| SGS | subgrid scale |
| SWISS | synonym for Switzerland |
| TEMP | synonym for the measurement as well as evaluation of the data collected via radiosonde ascent |
| TKE | turbulence kinetic energy |
| TTH | turbulence top height |
| WGS84 | World Geodetic System as a reference coordinate system |
| WV | water vapor (channel, e.g., 6.2 or 7.3 µm band) |
References
- Sharman, R.; Lane, T. Aviation Turbulence; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Raschendorfer, M. The New Turbulence Parameterization of LM. COSMO Newsl. 2001, 1, 89–97. Available online: http://www.cosmo-model.org (accessed on 1 March 2010).
- Raschendorfer, M.; Barleben, A. Forecast of hazardous turbulence for aviation and its registration. Promet Jahrg. 2014, 39, Nr. 1/2 23-35. (In Germany) [Google Scholar]
- Raschendorfer, M. Further steps towards a scale separated turbulence scheme. In Proceedings of the 13th COSMO General Meeting, Rome, Italy, 5–9 September 2011; Available online: http://www.cosmo-model.org/content/consortium/generalMeetings/general2011/wg3a.htm (accessed on 1 March 2020).
- Arndt, E. Comparison of Radiation Predictions (Nowcasting) with Predictions from Numerical Weather Models in the Context of Seamless Radiation Prediction. Master’s Thesis, Johann Wolfgang Goethe Universität Frankfurt am Main, Frankfurt, Germany, 2019. [Google Scholar]
- Zach, C.; Pock, T.; Bischof, H. A duality based approach for realtime TV-L1 optical flow. In Pattern Recognition DAGM 2007; Hamprecht, F.A., Schnörr, C., Jähne, B., Eds.; Lecture Notes in Computer, Science; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4713. [Google Scholar]
- James, P.M.; Reichert, R.K.; Heizenreder, D. NowCastMIX: Automatic integrated warnings for severe convection on nowcasting time scales at the german weather service. Wea. Forecast. 2018, 33, 1413–1433. [Google Scholar] [CrossRef]
- Müller, R.; Haussler, S.; Jerg, M. The role of NWP filter for the satellite based detection of cumulonimbus clouds. Remote Sens. 2018, 10, 386. Available online: https://www.mdpi.com/2072-4292/10/3/386 (accessed on 1 March 2020). [CrossRef] [Green Version]
- Müller, R.; Haussler, S.; Jerg, M.; Heizenreder, D. A novel approach for the detection of developing thunderstorm cells. Remote Sens. 2019, 11, 443. Available online: https://www.mdpi.com/2072-4292/11/4/443 (accessed on 1 March 2020). [CrossRef] [Green Version]
- Mellor, G.; Yamada, T. Development of a turbulence closure model for geophysical fluid problems. Rev. Geophys. Space Phys. 1982, 20, 851–875. [Google Scholar] [CrossRef] [Green Version]
- Barleben, A.; Raschendorfer, M. Forecast of Hazardous Turbulence for Aviation. Self-Published: Offenbach am Main: Internal Report of the German Weather Service. Germany. 2016. Available online: www.dwd.de (accessed on 1 March 2020).
- Göcke, T.; Machulskaya, E. Aviation turbulence forecasting at DWD with ICON: Methodology, case studies and verification. Mon. Weather Rev. 2020. submitted. [Google Scholar]
- Fortun, D.; Bouthemy, P.; Kervrann, C.; Fortun, D.; Bouthemy, P.; Kervrann, C. Optical flow modeling and computation: A survey. Comput. Vis. Image Underst. 2015, 134, 1–21. Available online: https://hal.inria.fr/hal-01104081/file/CVIU_survey.pdf (accessed on 1 March 2020). [CrossRef] [Green Version]
- Corpetti, T.; Heitz, D.; Arroyo, G.; Mémin, E.; Santa-Cruz, A. Fluid experimental flow estimation based on an optical-flow scheme. Exp. Fluids 2006, 40, 80–97. [Google Scholar] [CrossRef]
- Fleet, D.; Weiss, Y. Optical flow estimation. In Math. Models for Comput. Vision: The Handb.; Springer: Boston, MA, USA, 2005; pp. 239–257. [Google Scholar]
- Héas, P.; Mémin, E.; Papadakis, N.; Szantai, A. Layered estimation of atmospheric mesoscale dynamics from satellite imagery. IEEE Trans. Geosci. Remote Sens. 2007, 45, 4087–4104. [Google Scholar] [CrossRef] [Green Version]
- Urbich, I.; Bendix, J.; Müller, R. A novel approach for the short-term forecast of the effective cloud albedo. Remote Sens. 2018, 10, 955. Available online: https://www.mdpi.com/2072-4292/10/6/955 (accessed on 1 March 2020). [CrossRef] [Green Version]
- Chuang, W.-L.; Chou, C.-B.; Chang, K.-A.; Chang, C.-Y.; Chin, H.-L. Atmospheric motion vectors derived from an infrared window channel of a geostationary satellite using particle image velocimetry. J. Appl. Meteor. Climatol. 2019, 58, 199–211. [Google Scholar] [CrossRef]
- Szejwach, G. Determination of semi-transparent cirrus cloud temperature from infrared radiances: Application to METEOSAT. J. Appl. Meteor. 1982, 21, 384–393. [Google Scholar] [CrossRef] [Green Version]
- Nieman, S.J.; Schmetz, J.; Menzel, W.P. A comparison of several techniques to assign heights to cloud tracers. J. Appl. Meteor. 1993, 32, 1559–1568. [Google Scholar] [CrossRef]
- Cornman, L.B.; Morse, C.S.; Cunning, G.M. Real-time estimation of atmospheric turbulence severity from in-situ aircraft measurements. J. Aircr. 1995, 32, 171–177. [Google Scholar] [CrossRef]
- Carr, J.L.; Wu, D.L.; Kelly, M.A.; Gong, J. MISR-GOES 3D winds: Implications for future LEO-GEO and LEO-LEO winds. Remote Sens. 2018, 10, 1885. Available online: https://www.mdpi.com/2072-4292/10/12/1885 (accessed on 1 March 2020). [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Tau | 0.125 | Type | regular lat/lon (eqc) |
| Lambda | 0.15 | lat_ts | 50 |
| Teta | 0.3 | lat_0 | 50 |
| Epsilon | 0.01 | lon_0 | 10 |
| outerIterations | 60 | A | 6378137.0 |
| innerIterations | 20 | B | 6356752.3 |
| Gamma | 0 | Height | 1113 pixels |
| scalesNumber | 5 | Width | 1193 pixels |
| scaleStep | 0.5 | lower left corner (xy) | -2146643.682, -1669792.3619 |
| Warps | 5 | upper right corner (xy) | 1431095.788, 1669792.3619 |
| medianFiltering | 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Barleben, A.; Haussler, S.; Müller, R.; Jerg, M. A Novel Approach for Satellite-Based Turbulence Nowcasting for Aviation. Remote Sens. 2020, 12, 2255. https://doi.org/10.3390/rs12142255
Barleben A, Haussler S, Müller R, Jerg M. A Novel Approach for Satellite-Based Turbulence Nowcasting for Aviation. Remote Sensing. 2020; 12(14):2255. https://doi.org/10.3390/rs12142255
Chicago/Turabian StyleBarleben, Axel, Stéphane Haussler, Richard Müller, and Matthias Jerg. 2020. "A Novel Approach for Satellite-Based Turbulence Nowcasting for Aviation" Remote Sensing 12, no. 14: 2255. https://doi.org/10.3390/rs12142255