Comparing Nadir and Multi-Angle View Sensor Technologies for Measuring in-Field Plant Height of Upland Cotton

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Data Collection Platforms
2.1.1. Avenger Tractor
2.1.2. Unmanned Aerial System (UAS)
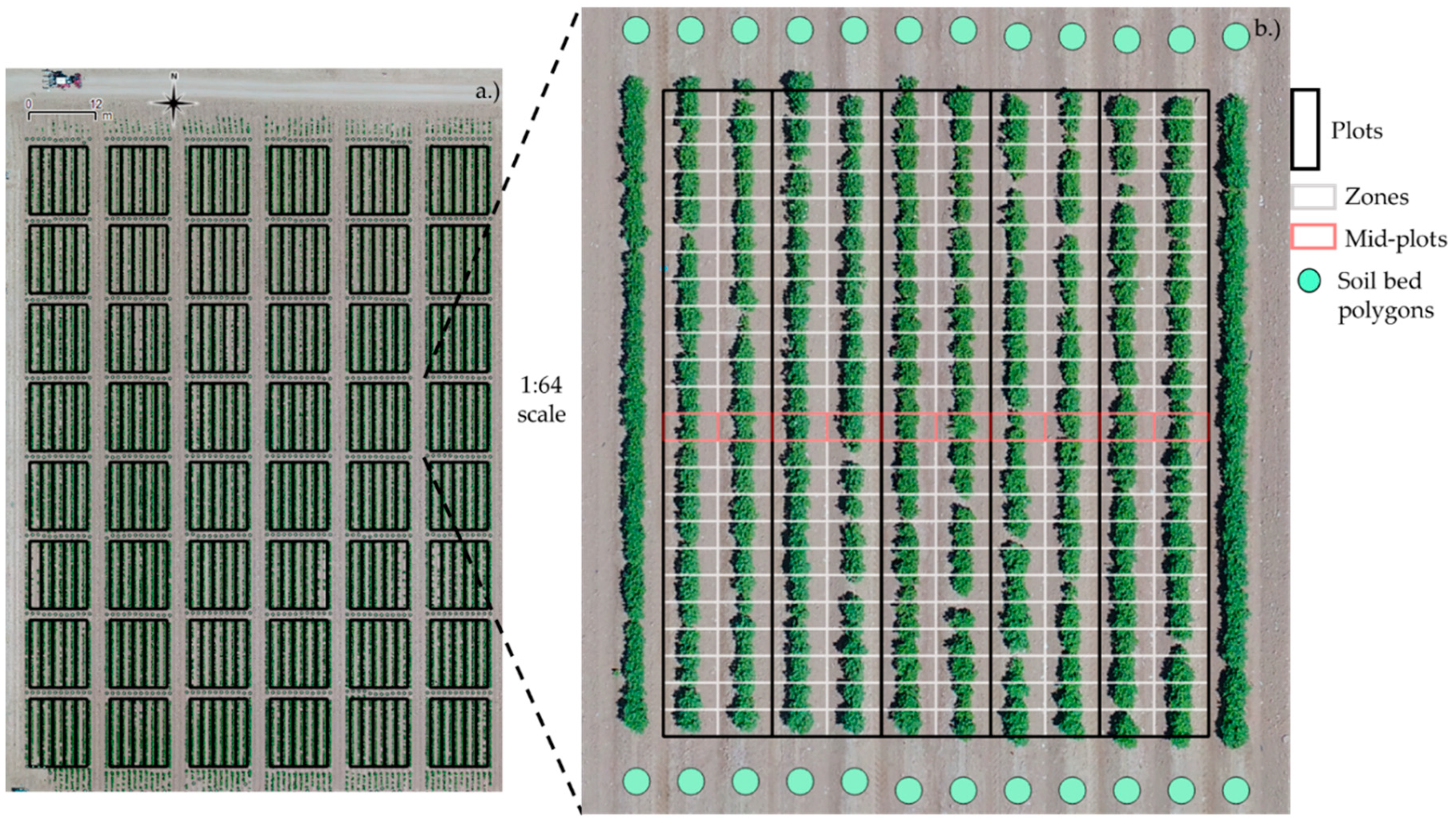
2.2. Field Experimental Design and Irrigation Management
2.3. Data Collections
2.3.1. Tractor
2.3.2. Manual
2.3.3. UAS
2.4. Geospatial Data Processing and Analysis
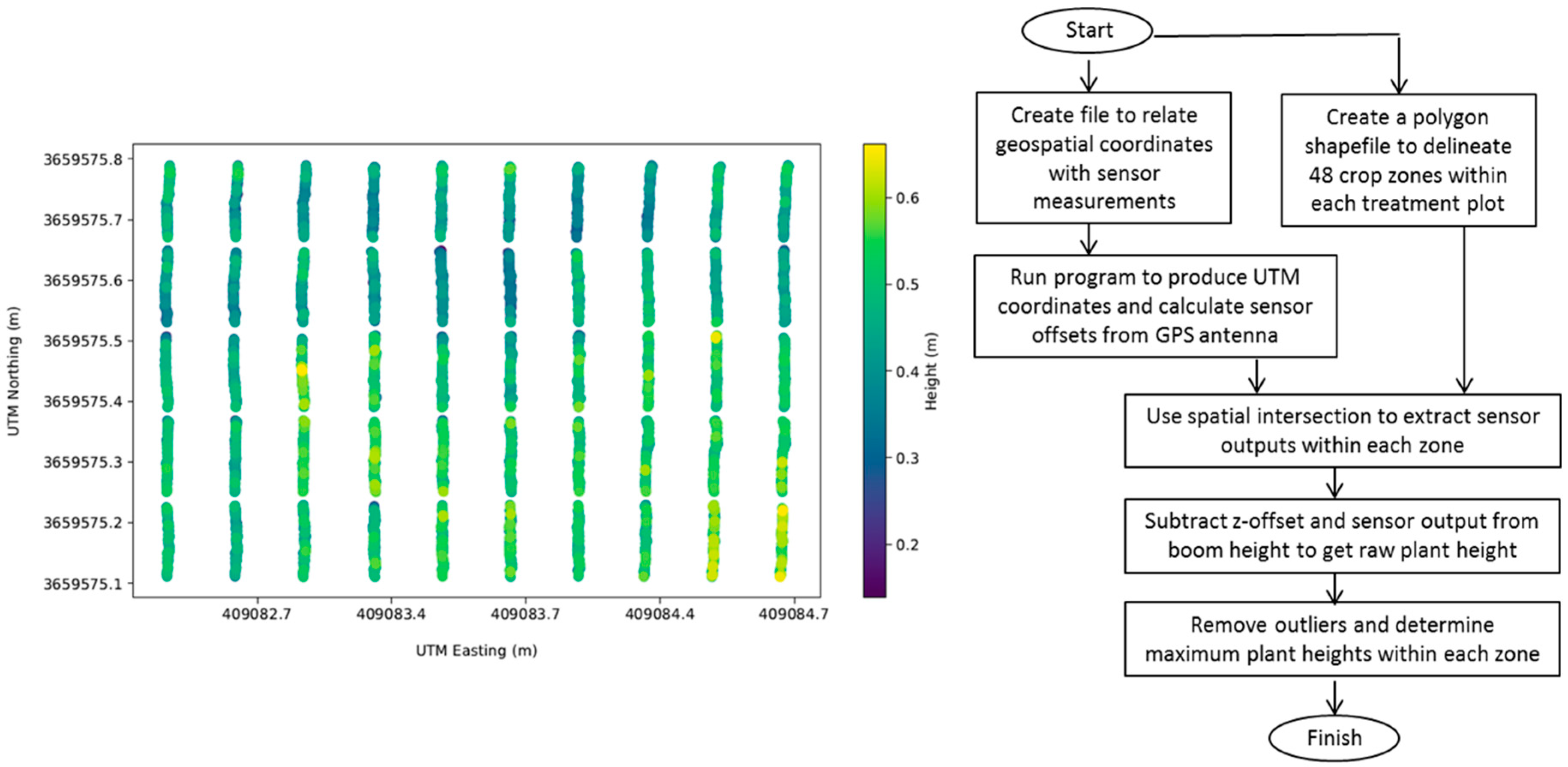
2.4.1. Ultrasonic Transducers and LidarLite V3
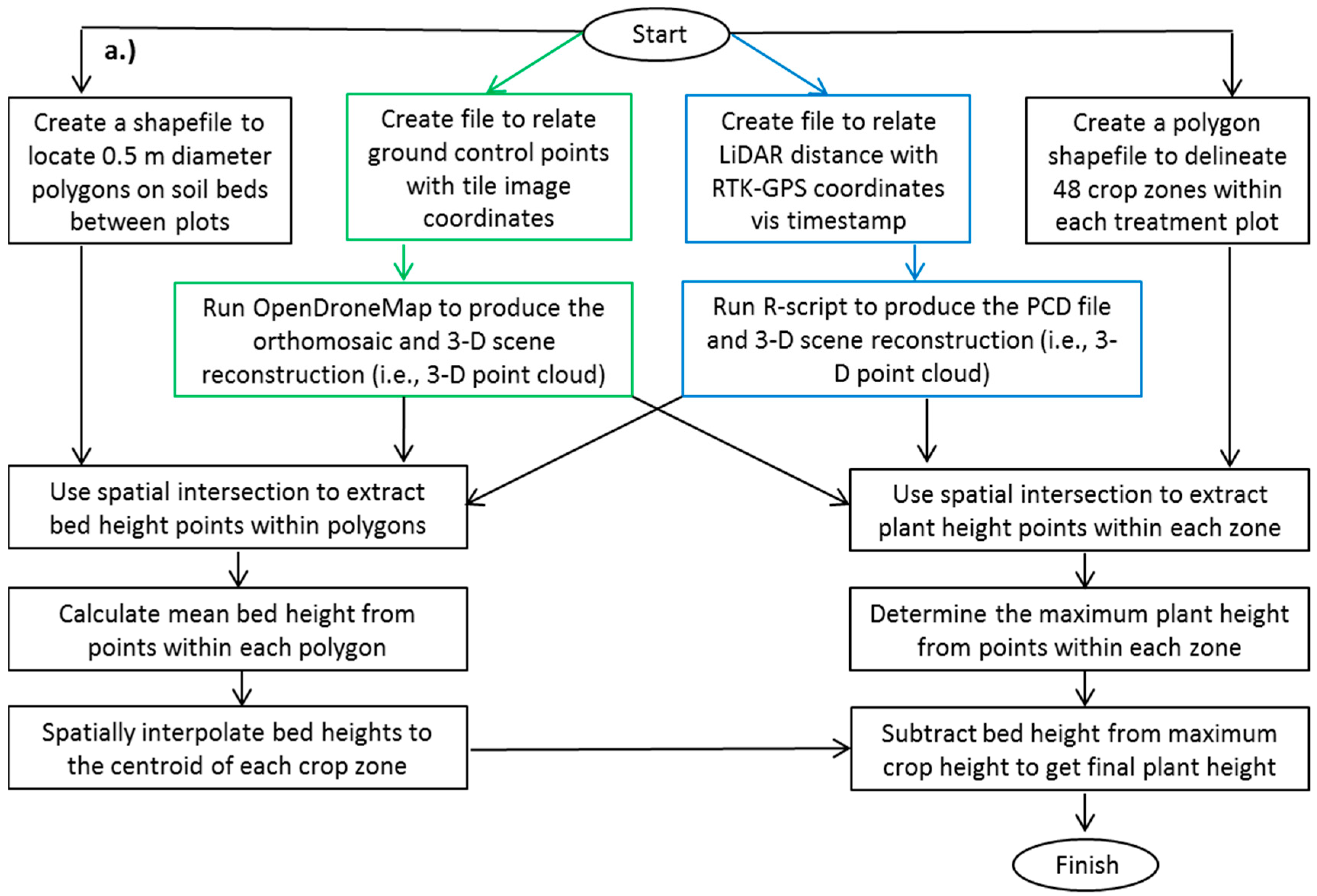
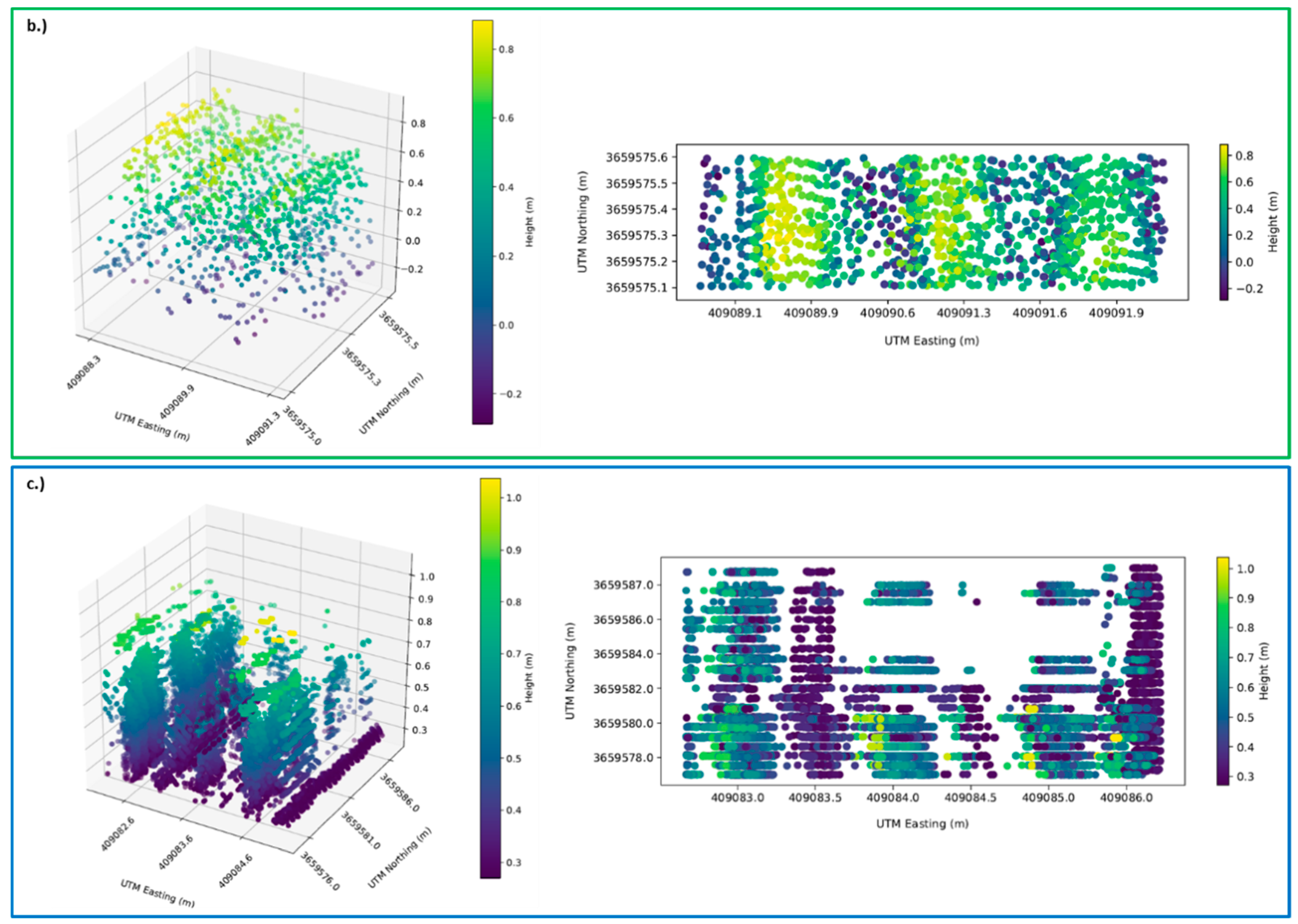
2.4.2. UAS Images
2.4.3. SICK LMS511
2.4.4. Sensor Performance and Plot-Level Statistical Analysis
3. Results
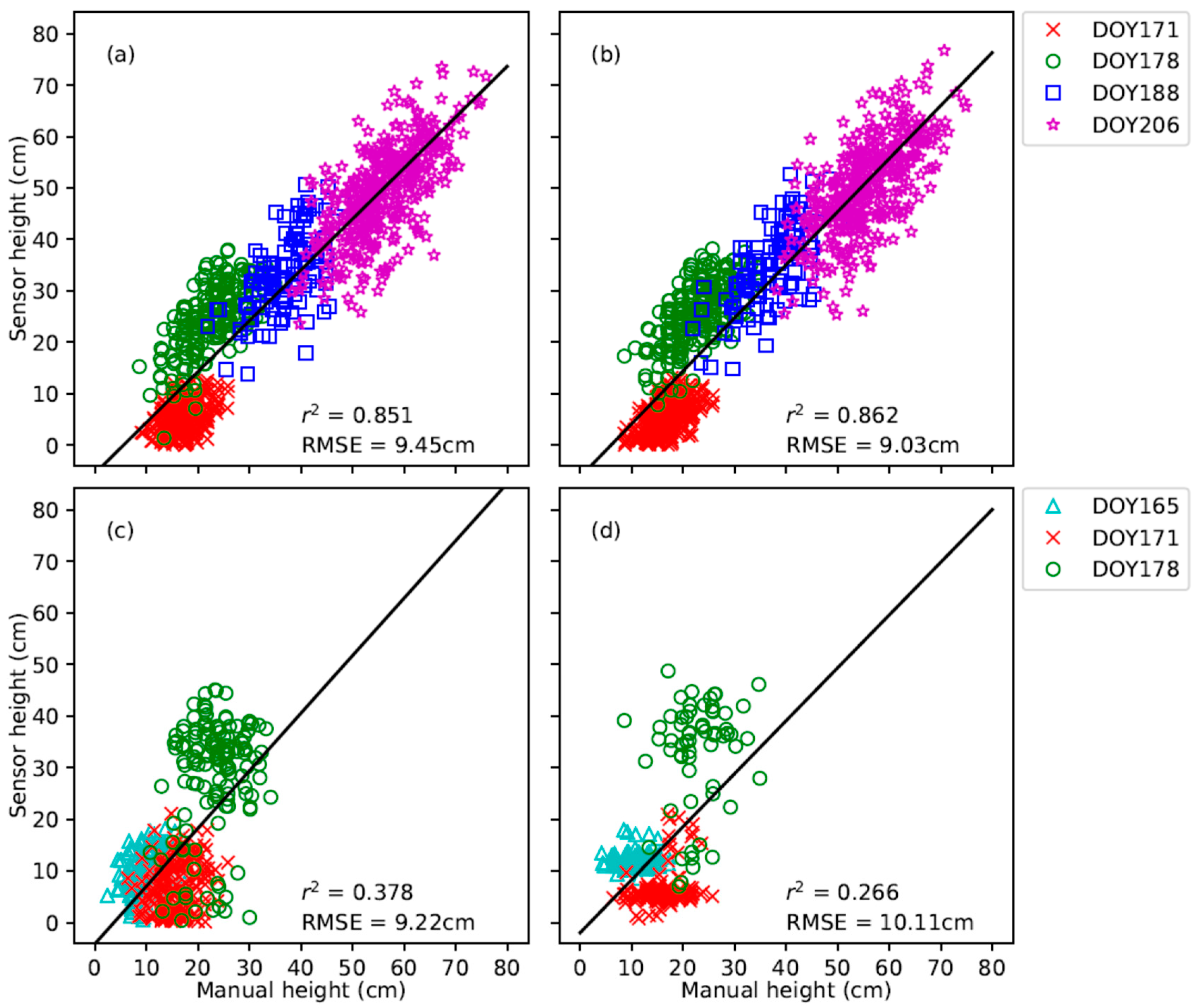
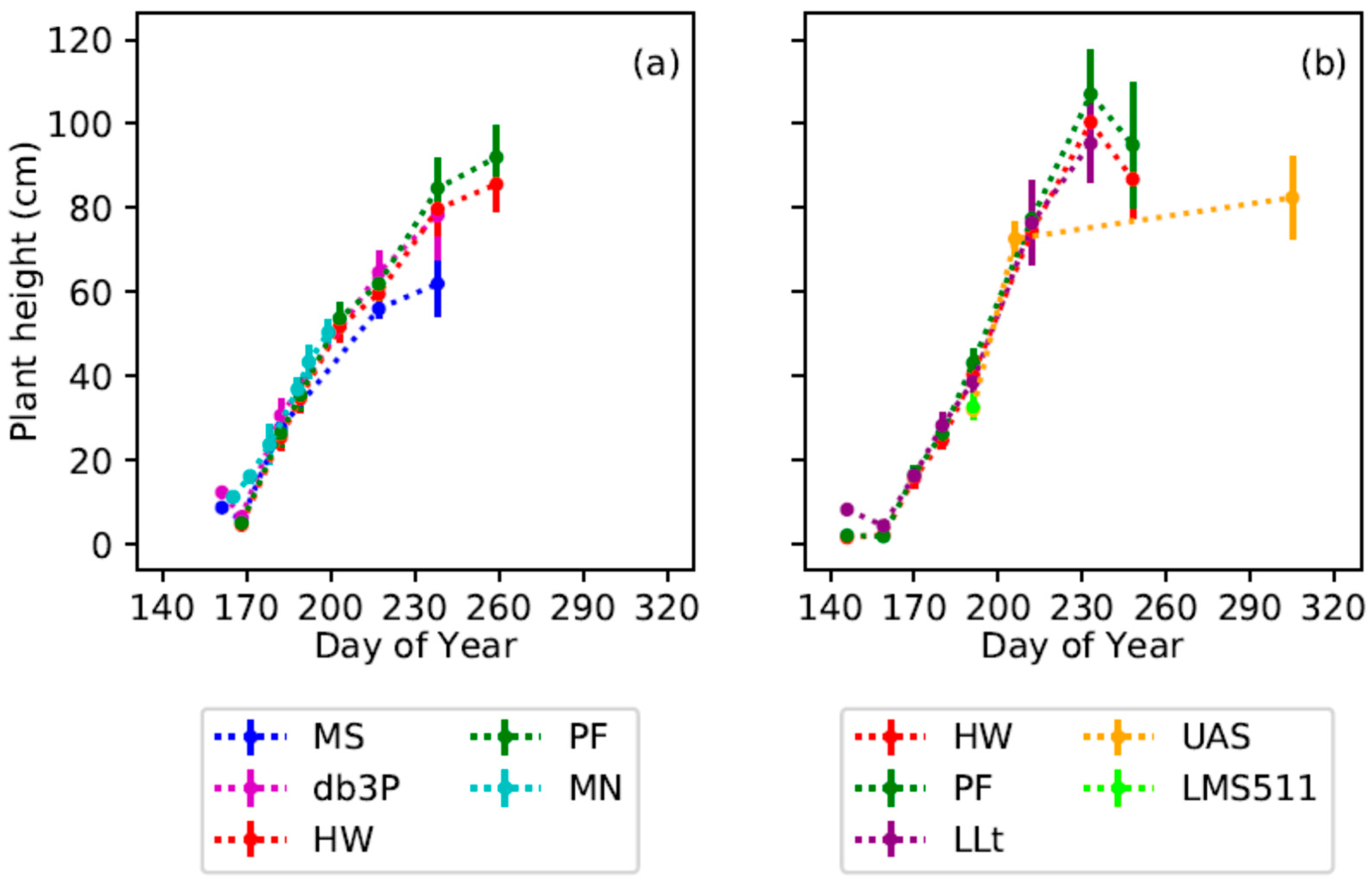
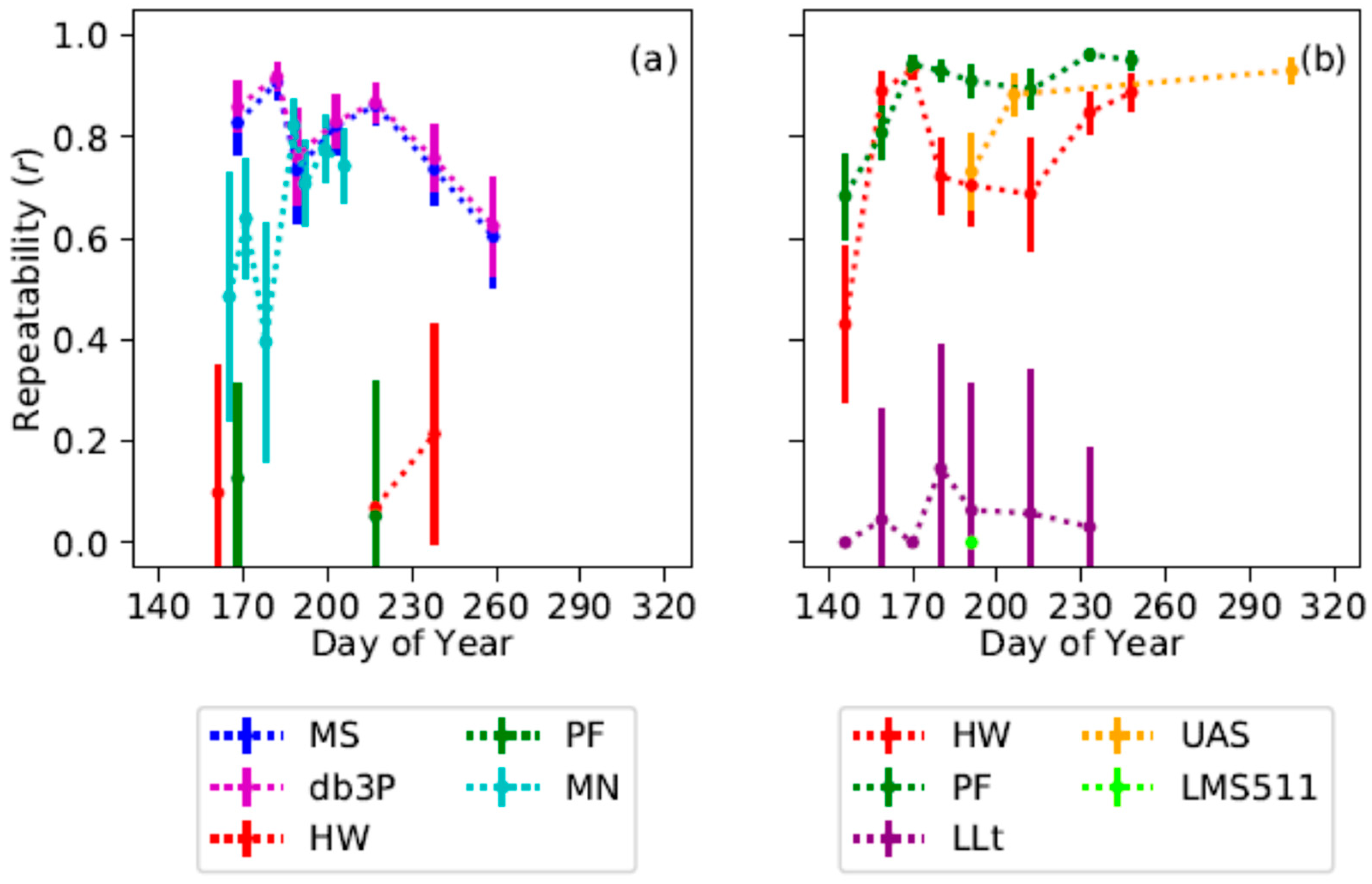
3.1. 2016 Estimates of Plant Height with Manual Measurements and Nadir View Sensors
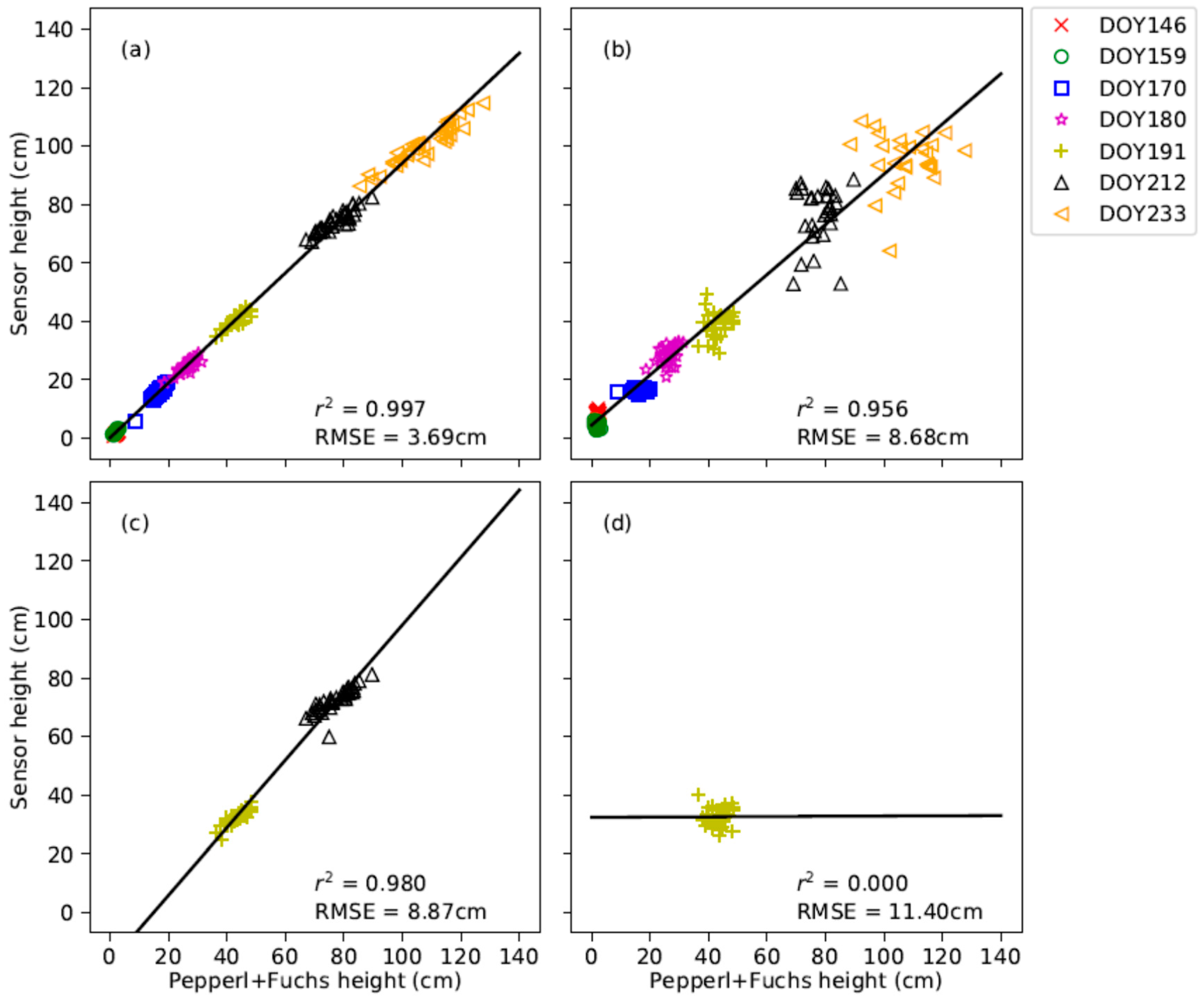
3.2. 2017 Estimates of Canopy Height with Nadir and Multi-Angle View Sensors
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Food and Agriculture Organization of the United States. FAOSTAT: Production/Crops. 2016. Available online: http://www.fao.org/faostat/en/#data/QC/visualize (accessed on 19 October 2018).
- Cotton Incorporated. Monthly Economic Letter: Cotton Market Fundamentals and Price Outlook. 2016. Available online: http://www.cottoninc.com/corporate/Market-Data/MonthlyEconomicLetter (accessed on 19 October 2018).
- National Cotton Council of America. World of Cotton. 2018. Available online: http://www.cotton.org/econ/world/ (accessed on 19 October 2018).
- Paterson, A.H.; Saranga, Y.; Menz, M.; Jiang, C.-X.; Wright, R.J. QTL analysis of genotype x environment interactions affecting fiber quality. Theor. Appl. Genet. 2003, 106, 384–396. [Google Scholar] [CrossRef] [PubMed]
- Pauli, D.; Andrade-Sanchez, P.; Carmo-Silva, A.E.; Gazave, E.; French, A.N.; Heun, J.; Hunsaker, D.J.; Lipka, A.E.; Setter, T.L.; Strand, R.J.; et al. Field-based high-throughput plant phenotyping reveals the temporal patterns of quantitative trait loci associated with stress-responsive traits in cotton. Genes Genomes Genet. 2016, 6, 865–879. [Google Scholar] [CrossRef] [PubMed]
- Ware, J.O. Plant Breeding and the Cotton Industry; USDA Yearbook of Agriculture, U.S. Gov. Print Office: Washington, DC, USA, 1937; pp. 657–744.
- Oosterhuis, D.M. Growth and Development of a Cotton Plant; Miley, W.N., Oosterhuis, D.M., Eds.; Nitrogen Nutrition of Cotton: Madison, WI, USA, 1990; pp. 1–24. [Google Scholar]
- Hake, K.; Burch, B.; Mauney, J. Making sense out of stalks: What controls plant height and how it affects yield. In Physiology Today Newsletter; National Cotton Council: Memphis, TN, USA, 1989; p. 4. [Google Scholar]
- Quisenberry, J.E.; Roark, B. Influence of indeterminate growth habit on yield and irrigation water-use efficiency in upland cotton. Crop Sci. 1976, 16, 762–765. [Google Scholar] [CrossRef]
- Sui, R.; Fisher, D.K.; Reddy, K.N. Cotton yield assessment using plant height mapping system. J. Agric. Sci. 2013, 5, 23–31. [Google Scholar] [CrossRef]
- White, J.W.; Andrade-Sanchez, P.; Gore, M.A.; Bronson, K.F.; Coffelt, T.A.; Conley, M.M.; Feldmann, K.A.; French, A.N.; Heun, J.T.; Hunsaker, D.J.; et al. Field-based phenomics for plant genetics research. Field Crops Res. 2012, 133, 101–112. [Google Scholar] [CrossRef]
- Deery, D.; Jimenez-Berni, J.; Jones, H.; Sirault, X.; Furbank, R. Proximal remote sensing buggies and potential applications for field-based phenotyping. Agron. J. 2014, 5, 349–379. [Google Scholar] [CrossRef]
- Lin, Y. LiDAR: An important tool for next-generation phenotyping technology of high potential for plant phenomics? Comput. Electron. Agric. 2015, 199, 61–73. [Google Scholar] [CrossRef]
- Andrade-Sanchez, P.; Gore, M.A.; Heun, J.T.; Thorp, K.R.; Carmo-Silva, A.E.; French, A.N.; Salvucci, M.E.; White, J.W. Development and evaluation of a field-based high-throughput phenotyping platform. Funct. Plant Biol. 2014, 41, 68–79. [Google Scholar] [CrossRef] [Green Version]
- Thompson, A.L.; Thorp, K.R.; Conley, M.; Andrade-Sanchez, P.; Heun, J.T.; Dyer, J.M.; White, J.W. Deploying a proximal sensing cart to identify drought-adaptive traits in upland cotton for high-throughput phenotyping. Front. Plant Sci. 2018, 9, 507. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Singh, D.; Marla, S.; Morris, G.; Poland, J. Field-based high-throughput phenotyping of plant height in sorghum using different sensing technologies. Plant Methods 2018, 14, 53. [Google Scholar] [CrossRef] [PubMed]
- Sirault, X.; Fripp, J.; Paproki, A.; Kuffner, P.; Nguyen, C.; LI, R.; Daily, H.; Gui, J.; Furbank, R. PlantScan: A three-dimensional phenotyping platform for capturing the structural dynamic of plant development and growth. In Proceedings of the International Conference on Functional-Structural Plant Models, Helsinki, Finland, 12–13 December 2013. [Google Scholar]
- French, A.N.; Gore, M.A.; Thompson, A.L. Cotton phenotyping with LIDAR from a track-mounted platform. In Proceedings of the Autonomous Air and Ground Sensing Systems for Agricultural Optimization and Phenotyping, Baltimore, MD, USA, 17–21 April 2016. [Google Scholar]
- Madec, S.; Baret, F.; De Solan, B.; Thomas, S.; Dutartre, D.; Jezequel, S.; Hemmerlé, M.; Colombeau, G.; Comar, A. High-throughput phenotyping of plant height: Comparing unmanned aerial vehicles and ground LiDAR estimates. Front. Plant Sci. 2017, 8, 2002. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Changying, L.; Paterson, A.H. In-field high-throughput phenotyping of cotton plant height using LiDAR. Remote Sens. 2017, 9, 337. [Google Scholar] [CrossRef]
- Busemeyer, L.; Mentrup, D.; Möller, K.; Wunder, E.; Alheit, K.; Hahn, V.; Maurer, H.; Reif, J.; Würschum, T.; Müller, J.; et al. BreedVision—A multi-sensor platform for non-destructive field-based phenotyping in plant breeding. Sensors 2013, 13, 2830–2847. [Google Scholar] [CrossRef] [PubMed]
- Watanabe, K.; Guo, W.; Arai, K.; Takanashi, H.; Kajiya-Kanegae, H.; Kobayashi, M.; Yano, K.; Tokunaga, T.; Fujiwara, T.; Tsutsumi, N.; et al. High-throughput phenotyping of sorghum plant height using an unmanned aerial vehicle and its application to genomic prediction modeling. Front. Plant Sci. 2017, 8, 421. [Google Scholar] [CrossRef] [PubMed]
- Troscianko, J.; Stevens, M. Image calibration and analysis toolbox—A free software suite for objectively measuring reflectance, colour and pattern. Methods Ecol. Evol. 2015, 6, 1320–1331. [Google Scholar] [CrossRef] [PubMed]
- Allen, R.G.; Pereira, L.S.; Raes, D.; Smith, M. Crop Evapotranspiration—Guide-Lines for Computing Crop Water Requirements; FAO Irrigation and Drainage Paper 56; Food and Agriculture Organization of the United Nations: Rome, Italy, 1998. [Google Scholar]
- Hunsaker, D.J.; Barnes, E.M.; Clarke, T.R.; Fitzgerald, G.J.; Pinter, P.J. Cotton irrigation scheduling using remotely sensed and FAO-56 basal crop coefficients. Trans. ASABE 2005, 48, 1395–1407. [Google Scholar] [CrossRef]
- Brown, P.W. Accessing the Arizona Meteorological Network (AZMET) by Computer; Extension Report No. 8733; University of Arizona: Tucson, AZ, USA, 1989. [Google Scholar]
- Wang, X.; Thorp, K.R.; White, J.W.; French, A.N.; Poland, J.A. Approaches for geospatial processing of field-based high-throughput plant phenomics data from ground vehicle platforms. Trans. ASABE 2016, 59, 1053–1067. [Google Scholar]
- Kutner, M.H.; Nachtsheim, C.J.; Neter, J.; Li, W. Applied Linear Statistical Models; McGraw-Hill Irwin: New York, NY, USA, 2004. [Google Scholar]
- Shen, S. Accurate multiple view 3D reconstruction using patch-based stereo for large-scale scenes. IEEE Trans. Image Process. 2013, 22, 1901–1914. [Google Scholar] [CrossRef] [PubMed]
- Point Cloud Library. The PCD (Point Cloud Data) File Format. 2018. Available online: http://pointclouds.org/documentation/tutorials/pcd_file_format.php#pcd-file-format (accessed on 5 November 2018).
- Gilmour, A.R.; Gogel, B.J.; Cullis, B.R.; Thompson, R. ASReml User Guide Release 3.0; VSN International Ltd.: Hemel Hempstead, UK, 2009. [Google Scholar]
- Kenward, M.G.; Roger, J.H. Small sample inference for fixed effects from restricted maximum likelihood. Biometrics 1997, 53, 983–997. [Google Scholar] [CrossRef] [PubMed]
- Littell, R.C.; Milliken, G.A.; Stroup, W.W.; Wolfinger, R.D.; Schabenberger, O. SAS for Mixed Models; SAS Institute: Cary, NC, USA, 2006. [Google Scholar]
- Lynch, M.; Walsh, B. Genetics and Analysis of Quantative Traits; Sinauer Associates, Inc.: Sunderland, MA, USA, 1998. [Google Scholar]
- Holland, J.B.; Nyquist, W.E.; Cervantes-Martinez, C.T. Estimating and Interpreting Heritability for Plant Breeding: An Update; Janick, J., Ed.; Plant Breeding Reviews Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year | Sensor | Abbr. | Working | Temperature | Sampling | Logging | Beam | Z-offset | FOV | Cost |
|---|---|---|---|---|---|---|---|---|---|---|
| Range | Range | Rate | System | Angle | (m) | (m) | (USD) | |||
| 2016 | Honeywell 943-F4Y-2D | HW | ~0.2 to 2 m | N/A | 5 Hz | PXIe | 8° | 0.51 | 0.07 | $504 |
| Pepperl+Fuchs UC2000 | PF | ~0.8 to 2 m | −25 to + 70 °C | 5 Hz | PXIe | 5° | 0.80 | 0.07 | $362 | |
| MaxSonar MB7364 | MS | ~0.5 to 5 m | −40 to + 65 °C | 5 Hz | CR1000 | 11.3° | 1.03 | 0.20 | $135 | |
| Pulsar db3 | db3P | ~0.13 to 3 m | −30 to + 90 °C | 0.5 Hz | CR1000 | 10° | 1.03 | 0.18 | $712 | |
| Manual measurements | Manual | 2/plot | Scanner | $200 | ||||||
| 2017 | Honeywell 943-F4Y-2D | HW | ~0.2 to 2 m | N/A | 5 Hz | PXIe | 8° | 0.51 | 0.07 | $504 |
| Pepperl+Fuchs UC2000 | PF | ~0.8 to 2 m | −25–70 °C | 5 Hz | PXIe | 5° | 0.97 | 0.09 | $362 | |
| LidarLite V3 | LLt | ~1 to 40 m | −20–60 °C | 10 Hz | CR1000 | 1.35° | 1.04 | 0.02 | $130 | |
| SICK LMS511-10100 | LMS511 | ~0 to 80 m | −30–50 °C | 100 Hz | PXIe | 0.68° | 1.00 | 0.01 | $10,500 | |
| RGB camera | UAS | N/A | ~2images/plot | SD card | $1350 |
| Date | DOY | DAP | Platform |
|---|---|---|---|
| 9 June 2016 | 161 | 22 | Avenger |
| 14 June 2016 | 165 | 26 | Manual |
| 16 June 2016 | 168 | 29 | Avenger |
| 20 June 2016 | 171 | 32 | Manual |
| 27 June 2016 | 178 | 39 | Manual |
| 30 June 2016 | 182 | 43 | Avenger |
| 6 July 2016 | 188 | 49 | Manual |
| 7 July 2016 | 189 | 50 | Avenger |
| 11 July 2016 | 192 | 53 | Manual |
| 18 July 2016 | 199 | 60 | Manual |
| 21 July 2016 | 203 | 64 | Avenger |
| 26 July 2016 | 206 | 67 | Manual |
| 4 August 2016 | 217 | 78 | Avenger |
| 25 August 2016 | 238 | 99 | Avenger |
| 15 September 2016 | 259 | 120 | Avenger |
| 26 May 2017 | 146 | 16 | Avenger |
| 8 June 2017 | 159 | 29 | Avenger |
| 19 June 2017 | 170 | 40 | Avenger |
| 29 June 2017 | 180 | 50 | Avenger |
| 10 July 2017 | 191 | 61 | Avenger |
| 10 July 2017 | 191 | 61 | UAS |
| 25 July 2017 | 206 | 76 | UAS |
| 31 July 2017 | 212 | 82 | Avenger |
| 21 August 2017 | 233 | 103 | Avenger |
| 5 September 2017 | 248 | 118 | Avenger |
| 1 November 2017 | 305 | 175 | UAS |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Thompson, A.L.; Thorp, K.R.; Conley, M.M.; Elshikha, D.M.; French, A.N.; Andrade-Sanchez, P.; Pauli, D. Comparing Nadir and Multi-Angle View Sensor Technologies for Measuring in-Field Plant Height of Upland Cotton. Remote Sens. 2019, 11, 700. https://doi.org/10.3390/rs11060700
Thompson AL, Thorp KR, Conley MM, Elshikha DM, French AN, Andrade-Sanchez P, Pauli D. Comparing Nadir and Multi-Angle View Sensor Technologies for Measuring in-Field Plant Height of Upland Cotton. Remote Sensing. 2019; 11(6):700. https://doi.org/10.3390/rs11060700
Chicago/Turabian StyleThompson, Alison L., Kelly R. Thorp, Matthew M. Conley, Diaa M. Elshikha, Andrew N. French, Pedro Andrade-Sanchez, and Duke Pauli. 2019. "Comparing Nadir and Multi-Angle View Sensor Technologies for Measuring in-Field Plant Height of Upland Cotton" Remote Sensing 11, no. 6: 700. https://doi.org/10.3390/rs11060700