Registration of Terrestrial Laser Scanning Surveys Using Terrain-Invariant Regions for Measuring Exploitative Volumes over Open-Pit Mines


Abstract
:1. Introduction
2. Study Area and Data Acquisition
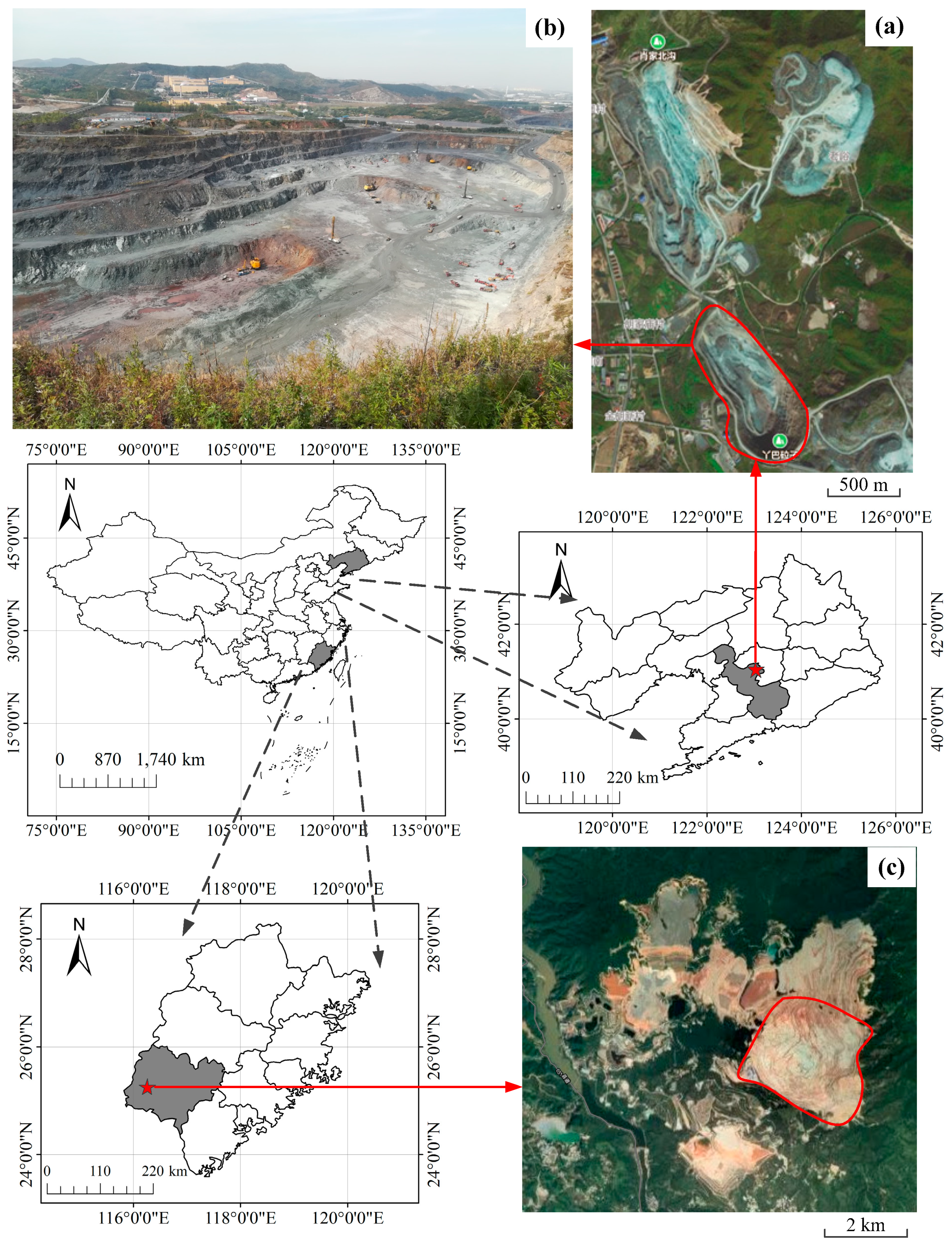
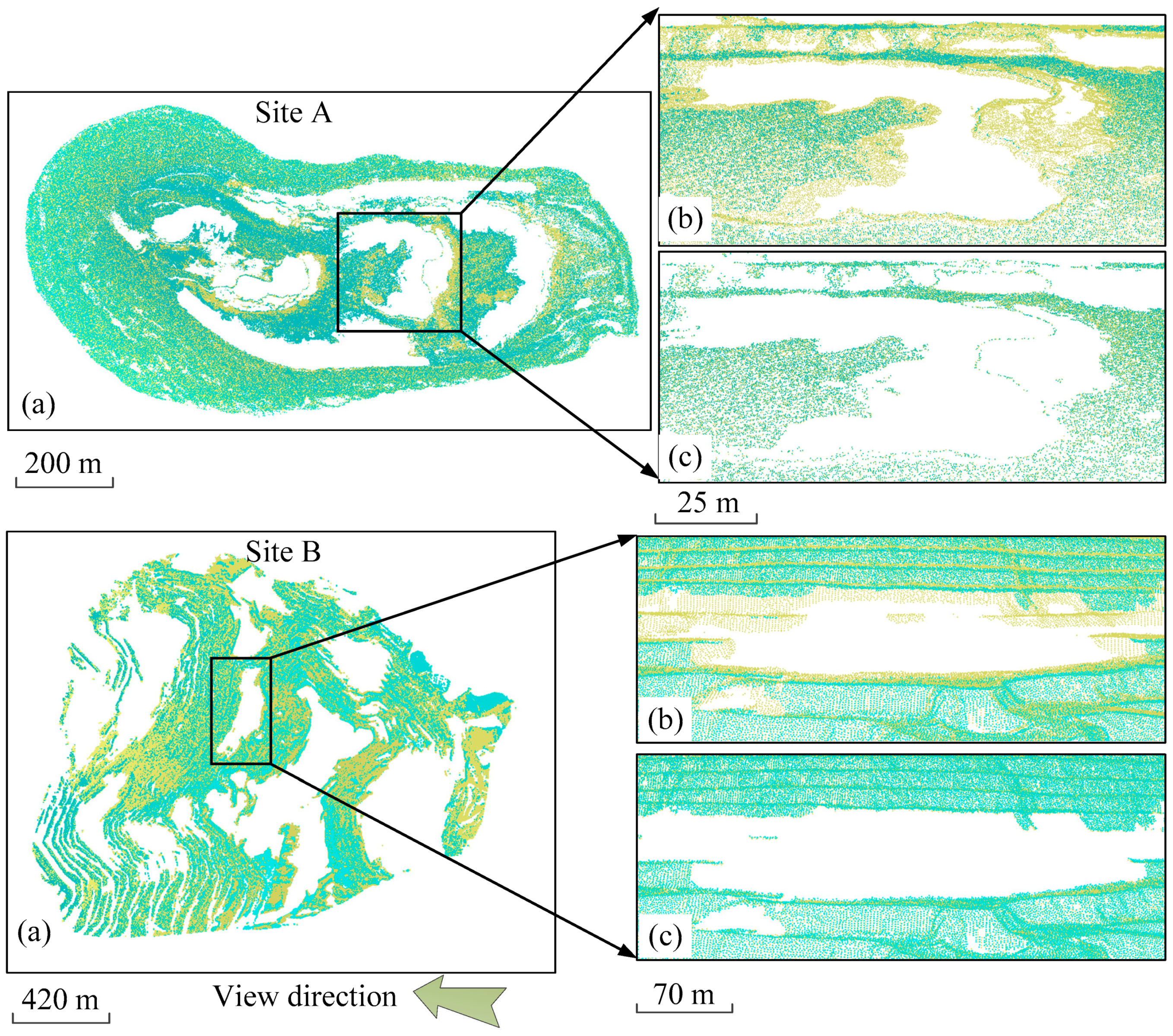
2.1. Study Area
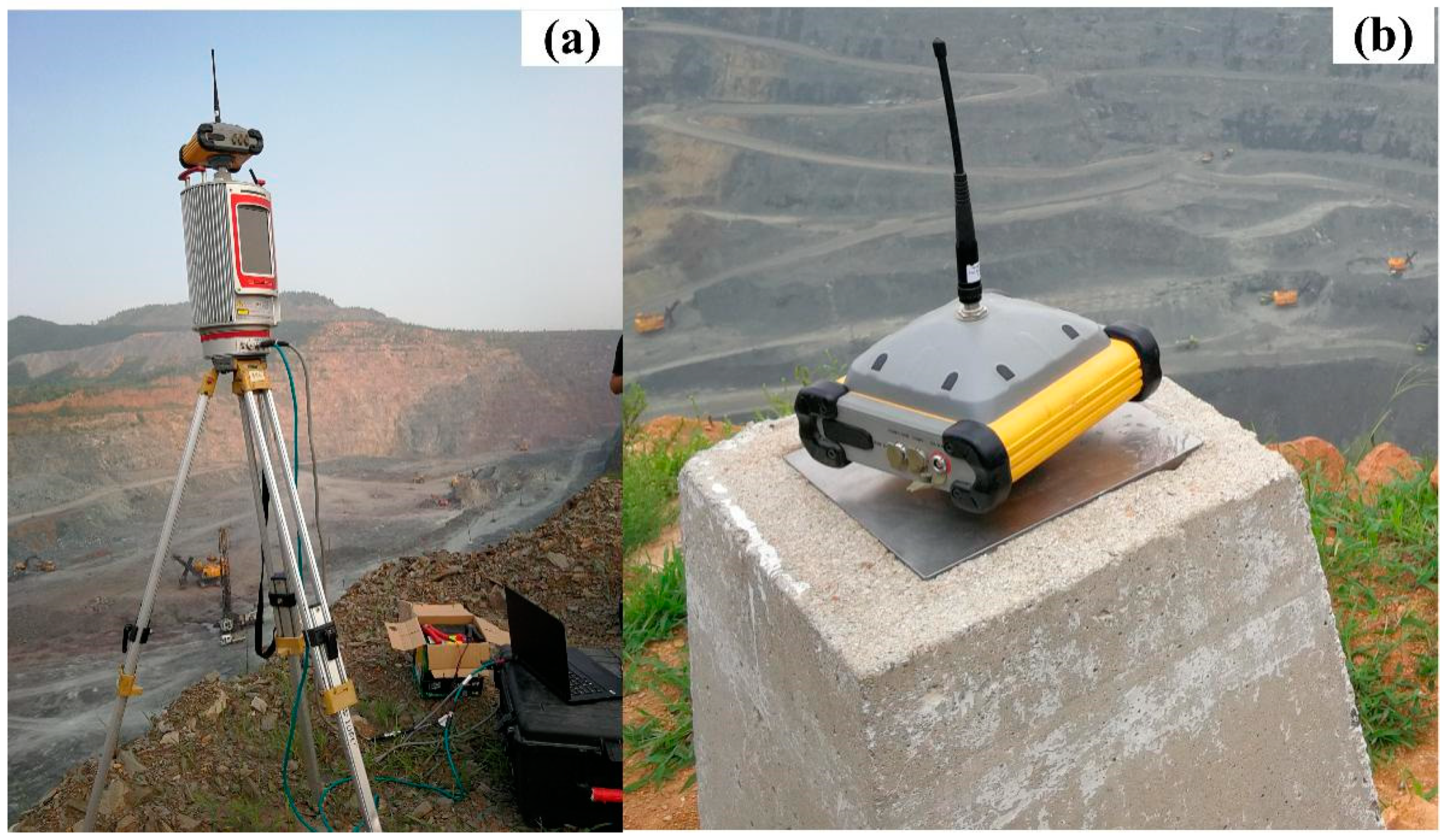
2.2. Data Acquisition
Terrestrial Surveying
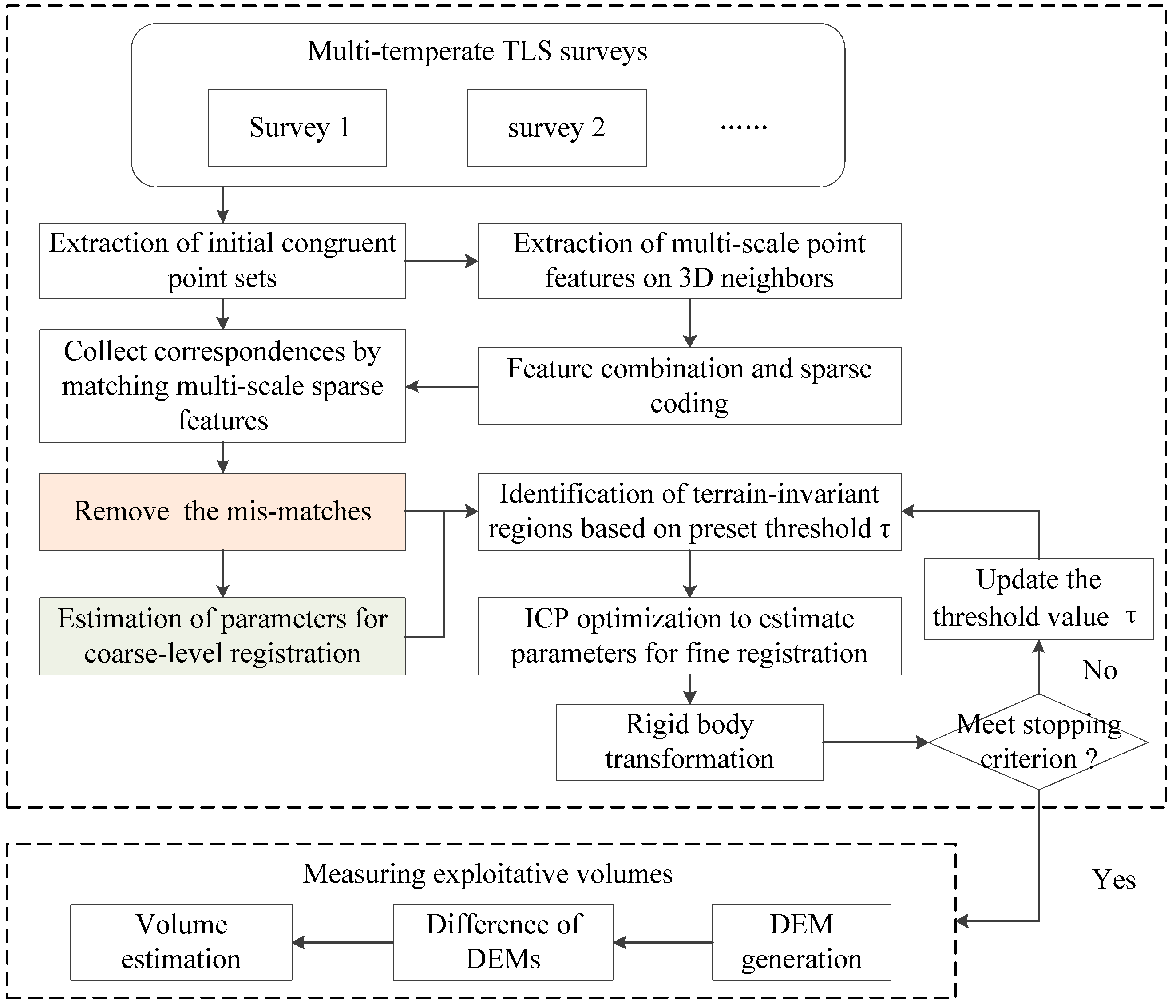
3. Methodology
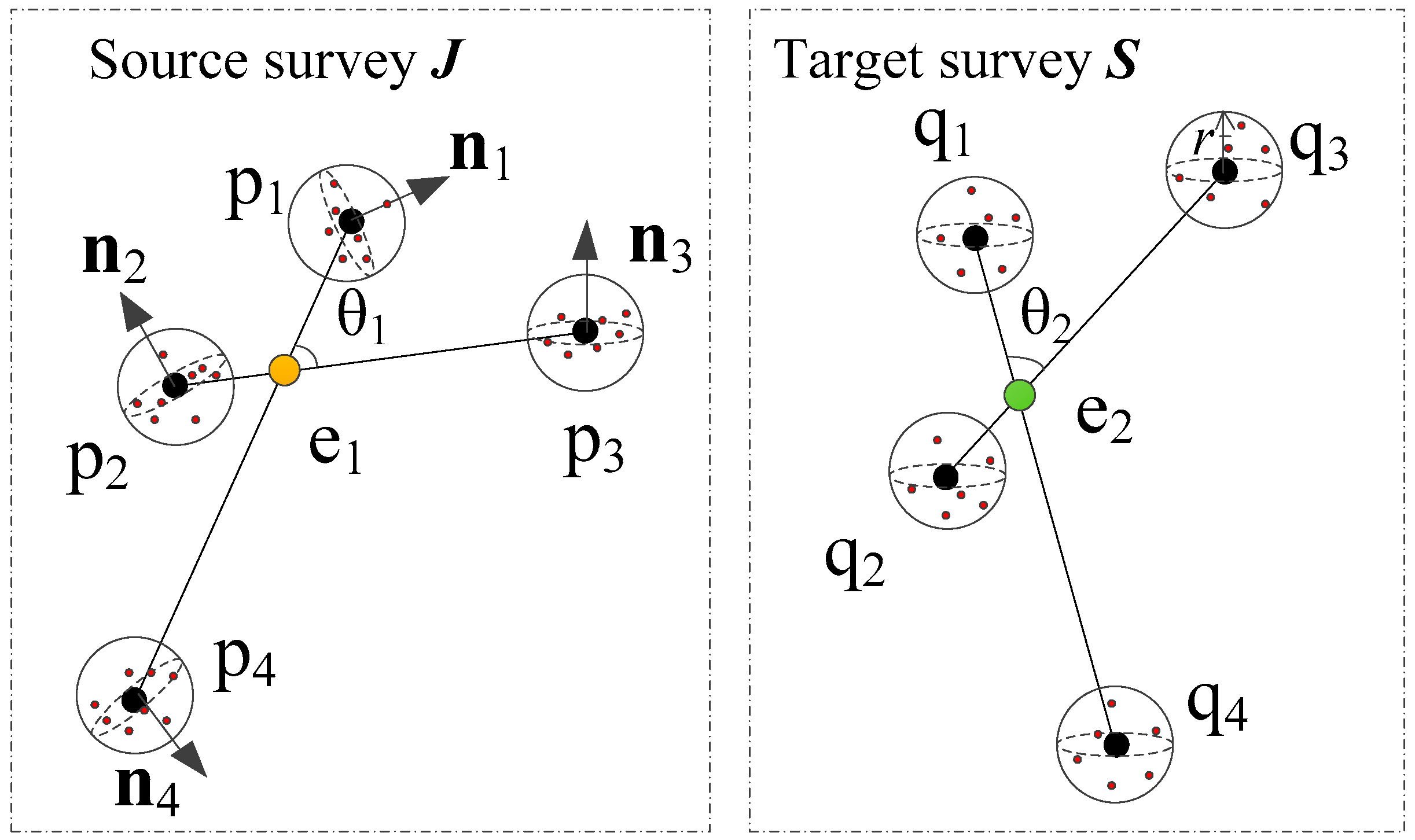
3.1. Identification of Approximate Congruent Sets from Temporal TLS Surveys
3.2. Coarse Registration of Temporal TLS Surveys by Matching Multi-Scale Sparse Features
3.3. Fine Registration of Temporal TLS Surveys through ICP Optimization on Terrain-Invariant Regions
3.4. Volume Calculation and Method Comparison
4. Results
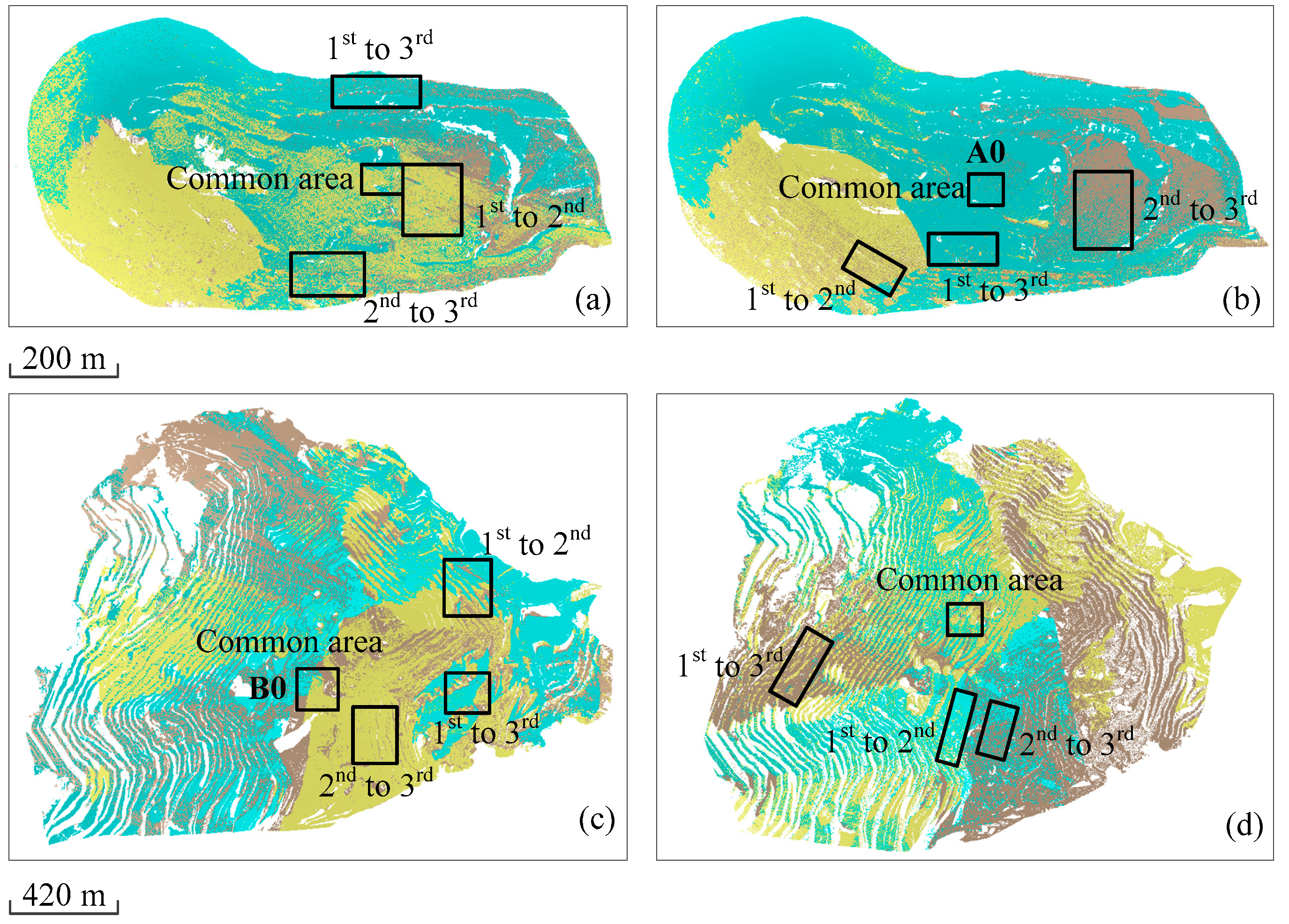
4.1. Registration of Multi-Station TLS Point Clouds
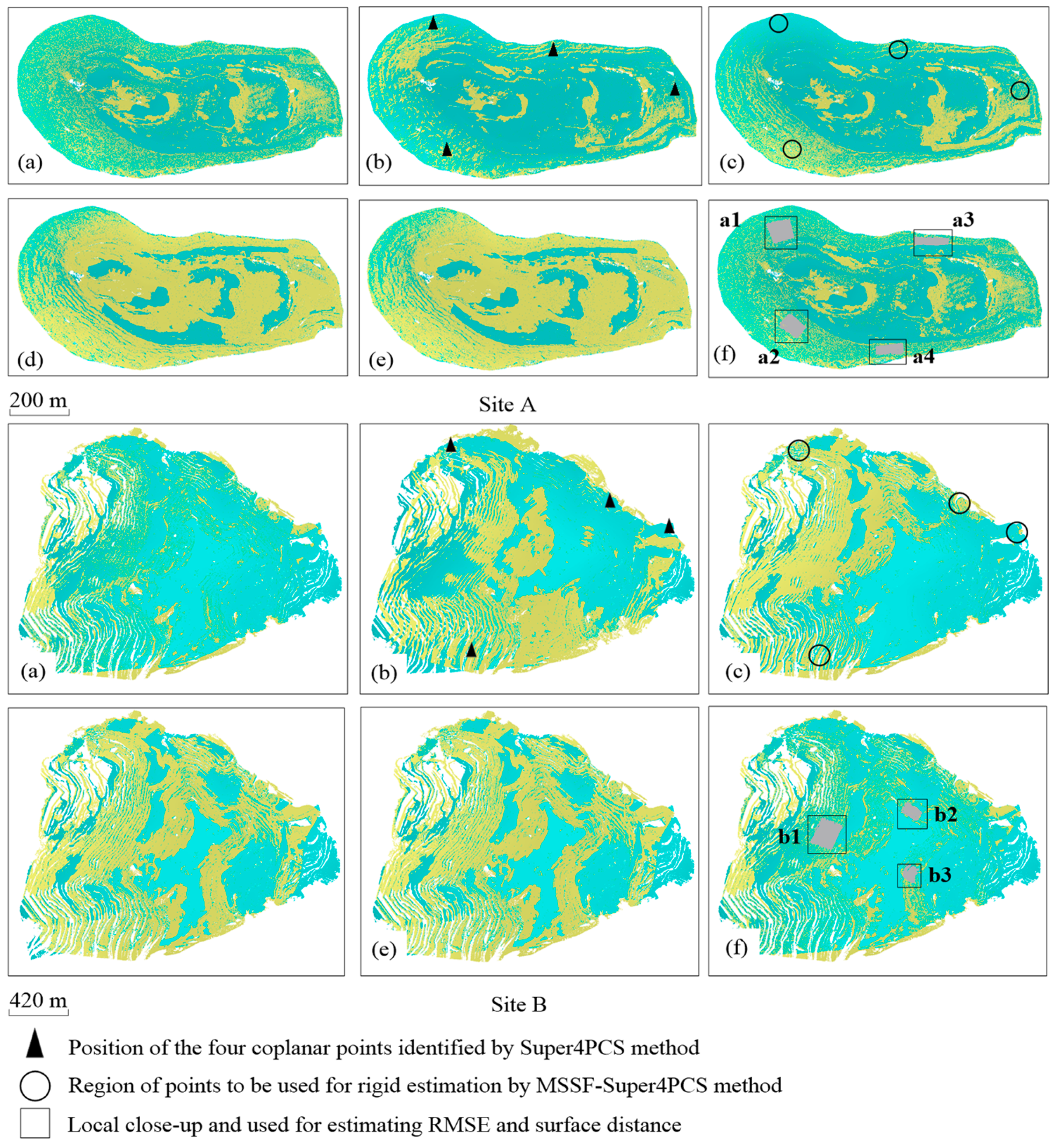
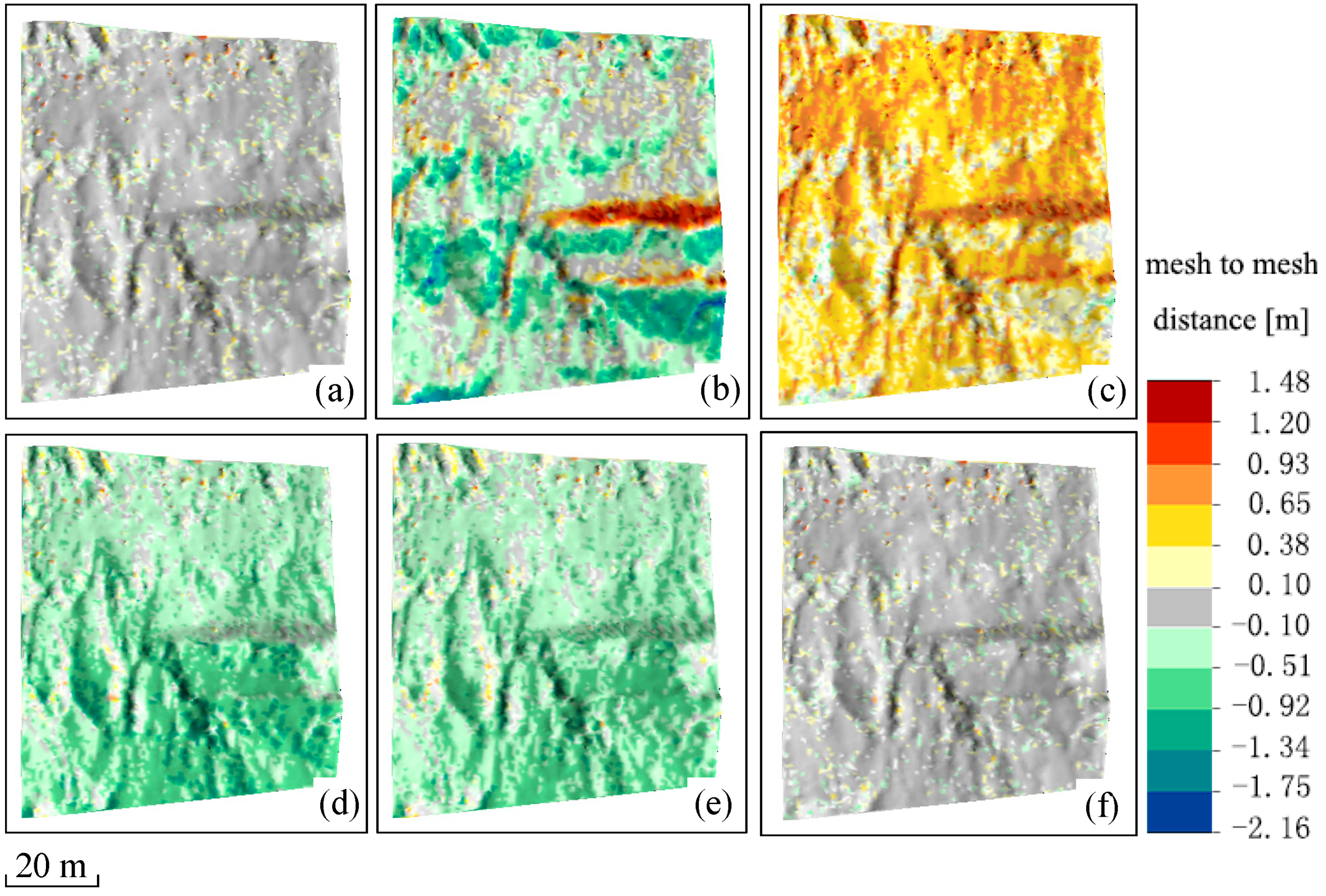
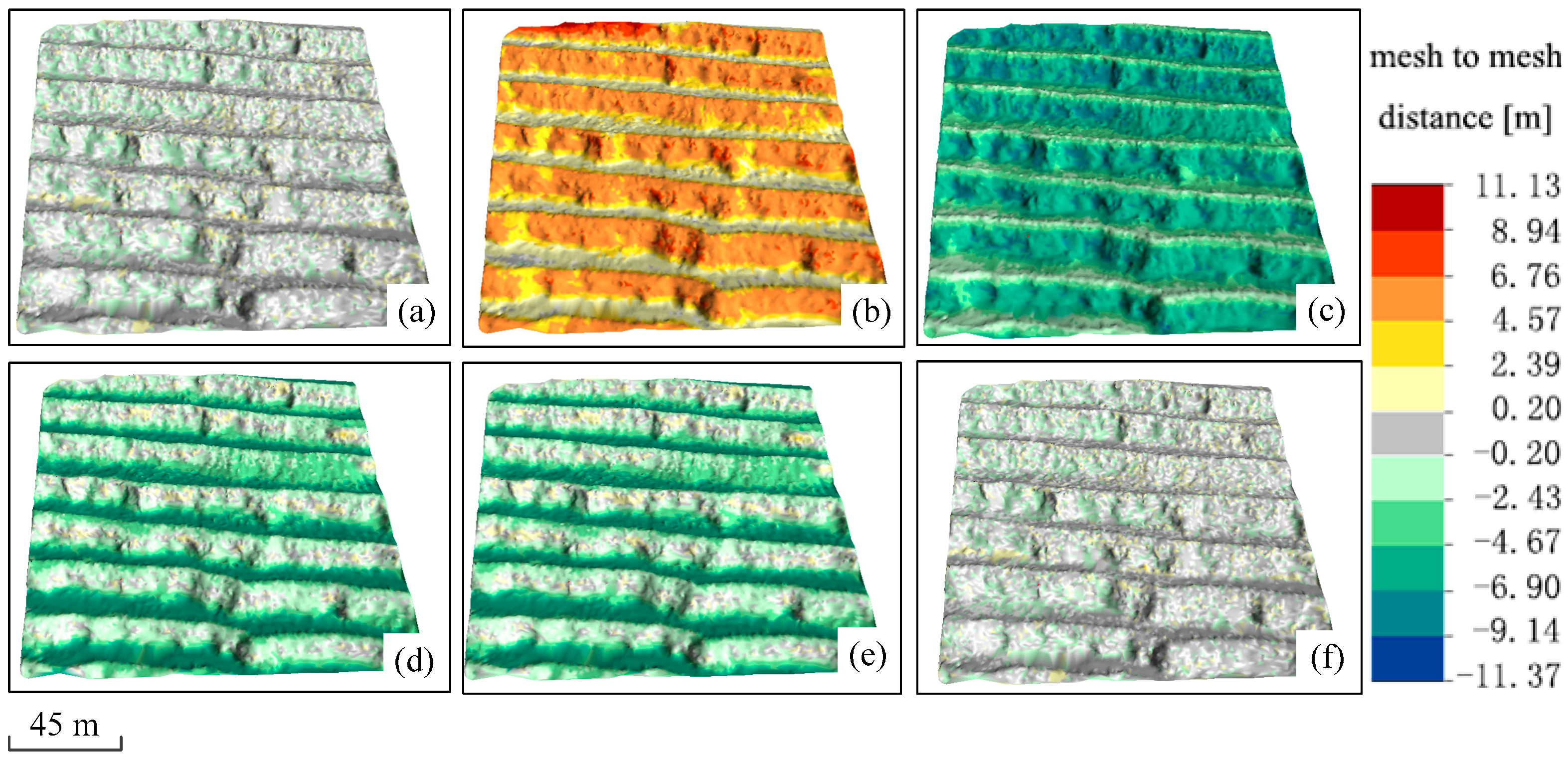
4.2. Registration of Temporal TLS Surveys
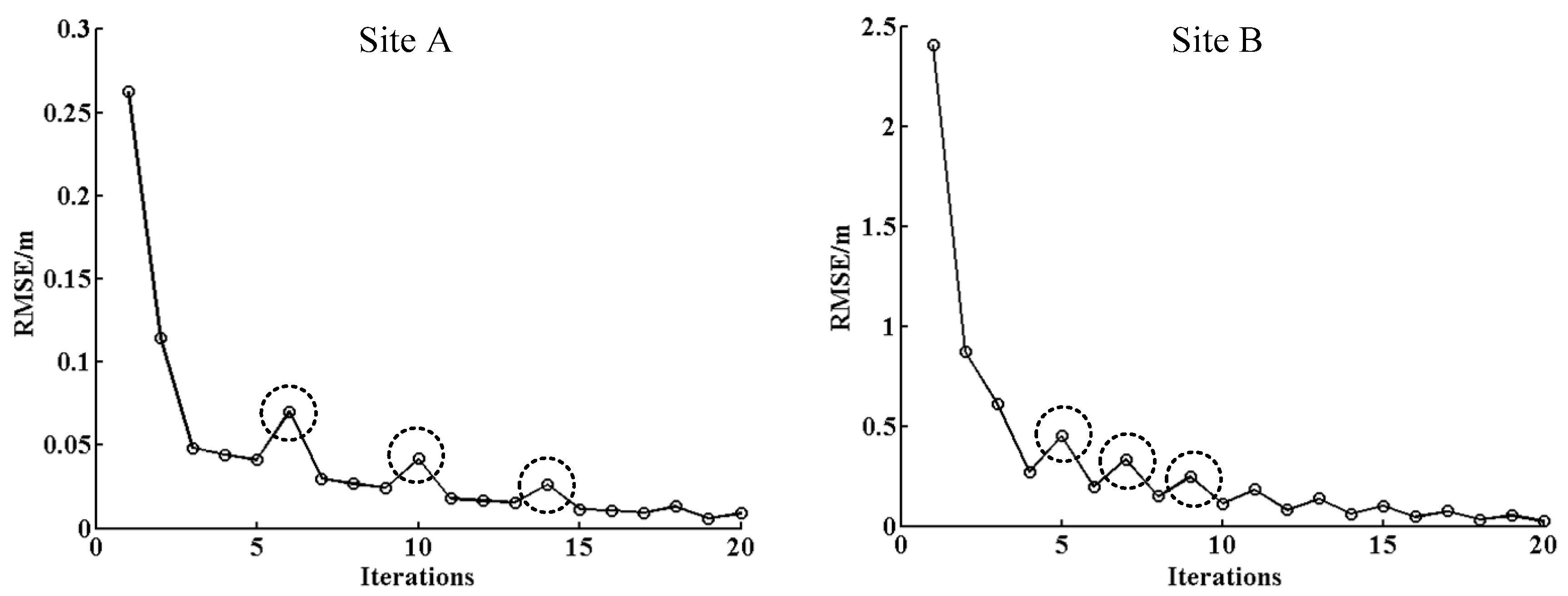
4.3. Parameter Test on Registration Accuracy for Identifying Terrain-Invariant Regions
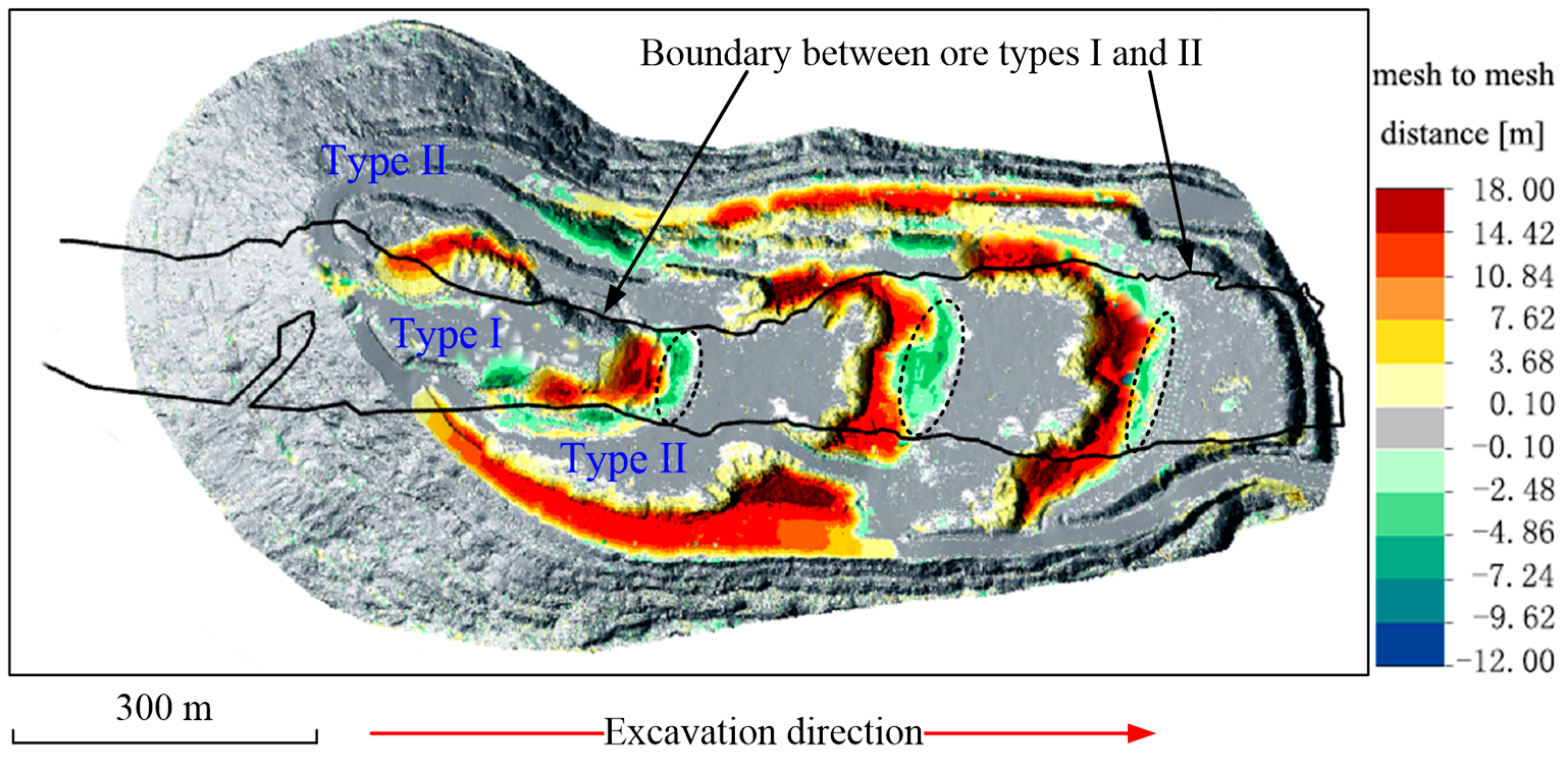
4.4. Measuring Exploitative Volume from Temporal TLS Survyes
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xiang, J.; Chen, J.; Sofia, G.; Tian, Y.; Tarolli, P. Open-pit mine geomorphic changes analysis using multi-temporal UAV survey. Environ. Earth Sci. 2018, 77, 1–18. [Google Scholar] [CrossRef]
- Sokolš, B.M.; Lipták, M.; Brunčák, P. Volumes determination in terms of various data density and surface diversity. J. Sustain. Min. 2014, 13, 23–27. [Google Scholar]
- Jaroslaw, W. Research on surveying technology applied for DTM modelling and volume computation in open pit mines. Min. Sci. 2015, 22, 69–77. [Google Scholar]
- Telling, J.; Lyda, A.; Hartzell, P.; Glennie, C. Review of earth science research using terrestrial laser scanning. Earth-Sci. Rev. 2017, 169, 35–68. [Google Scholar] [CrossRef]
- Wilkinson, M.; McCaffrey, K.; Roberts, G.; Cowie, P.; Phillips, R.; Michetti, A.M.; Vittori, E.; Guerrieri, L.; Blumetti, A.; Bubeck, A. Partitioned postseismic deformation associated with the 2009 Mw 6.3 L’Aquila earthquake surface rupture measured using a terrestrial laser scanner. Geophys. Res. Lett. 2010, 37, 1–7. [Google Scholar] [CrossRef]
- DeLong, S.B.; Lienkaemper, J.J.; Pickering, A.J.; Avdievitch, N.N. Rates and patterns of surface deformation from laser scanning following the South Napa earthquake, California. Geosphere 2015, 11, 2015–2030. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Pinkerton, H.; Applegarth, L.J. Detecting the development of active lava flow fields with a very-long-range terrestrial laser scanner and thermal imagery. Geophys. Res. Lett. 2009, 36, 1–5. [Google Scholar] [CrossRef]
- Slatcher, N.; James, M.; Calvari, S.; Ganci, G.; Browning, J. Quantifying effusion rates at active volcanoes through integrated time-lapse laser scanning and photography. Remote Sens. 2015, 7, 14967–14987. [Google Scholar] [CrossRef]
- Jones, L.K.; Kyle, P.R.; Oppenheimer, C.; Frechette, J.D.; Okal, M.H. Terrestrial laser scanning observations of geomorphic changes and varying lava lake levels at Erebus volcano, Antarctica. J. Volcanol. Geotherm. Res. 2015, 295, 43–54. [Google Scholar] [CrossRef] [Green Version]
- Teza, G.; Pesci, A.; Genevois, R.; Galgaro, A. Characterization of landslide ground surface kinematics from terrestrial laser scanning and strain field computation. Geomorphology 2008, 97, 424–437. [Google Scholar] [CrossRef]
- Kasperski, J.; Delacourt, C.; Allemand, P.; Potherat, P.; Jaud, M.; Varrel, E. Application of a terrestrial laser scanner (TLS) to the study of the Séchilienne Landslide (Isère, France). Remote Sens. 2010, 2, 2785–2802. [Google Scholar] [CrossRef]
- Aryal, A.; Brooks, B.A.; Reid, M.E. Landslide subsurface slip geometry inferred from 3D surface displacement fields. Geophys. Res. Lett. 2015, 42, 1411–1417. [Google Scholar] [CrossRef]
- Strunden, J.; Ehlers, T.A.; Brehm, D.; Nettesheim, M. Spatial and temporal variations in rockfall determined from TLS measurements in a deglaciated valley, Switzerland. J. Geophys. Res. Earth Surf. 2015, 120, 1251–1273. [Google Scholar] [CrossRef] [Green Version]
- Picco, L.; Mao, L.; Cavalli, M.; Buzzi, E.; Rainato, R.; Lenzi, M. Evaluating short-term morphological changes in a gravel-bed braided river using terrestrial laser scanner. Geomorphology 2013, 201, 323–334. [Google Scholar] [CrossRef]
- Nield, J.M.; Wiggs, G.F. The application of terrestrial laser scanning to aeolian saltation cloud measurement and its response to changing surface moisture. Earth Surf. Process. Landf. 2011, 36, 273–278. [Google Scholar] [CrossRef]
- Lee, H.; Lim, S.; Park, D. Application of terrestrial laser scanner and raster operations to change detection of beach. J. Coast. Res. 2011, 64, 1692–1696. [Google Scholar]
- Grayson, R.; Holden, J.; Jones, R.; Carle, J.; Lloyd, A. Improving particulate carbon loss estimates in eroding peatlands through the use of terrestrial laser scanning. Geomorphology 2012, 179, 240–248. [Google Scholar] [CrossRef] [Green Version]
- Hartzell, P.J.; Gadomski, P.J.; Glennie, C.L.; Finnegan, D.C.; Deems, J.S. Rigorous error propagation for terrestrial laser scanning with application to snow volume uncertainty. J. Glaciol. 2015, 61, 1147–1158. [Google Scholar] [CrossRef] [Green Version]
- Prokop, A. Assessing the applicability of terrestrial laser scanning for spatial snow depth measurements. Cold Reg. Sci. Technol. 2008, 54, 155–163. [Google Scholar] [CrossRef]
- Egli, L.; Jonas, T.; Grünewald, T.; Schirmer, M.; Burlando, P. Dynamics of snow ablation in a small Alpine catchment observed by repeated terrestrial laser scans. Hydrol. Process. 2012, 26, 1574–1585. [Google Scholar] [CrossRef]
- Fischer, M.; Huss, M.; Kummert, M.; Hoelzle, M. Application and validation of long-range terrestrial laser scanning to monitor the mass balance of very small glaciers in the Swiss Alps. Cryosphere 2016, 10, 1279–1295. [Google Scholar] [CrossRef]
- Avian, M.; Kellerer-Pirklbauer, A.; Bauer, A. LiDAR for monitoring mass movements in permafrost environments at the cirque Hinteres Langtal, Austria, between 2000 and 2008. Nat. Hazards Earth Syst. Sci. 2009, 9, 1087–1094. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Sohel, F.; Bennamoun, M.; Lu, M.; Wan, J. Rotational projection statistics for 3D local surface description and object recognition. Int. J. Comput. Vis. 2013, 105, 63–86. [Google Scholar] [CrossRef]
- Böhm, J.; Becker, S. Automatic marker-free registration of terrestrial laser scans using reflectance. In Proceedings of the 8th Conference on Optical 3D Measurement Techniques, Zurich, Switzerland, 9–12 July 2007; pp. 9–12. [Google Scholar]
- Zai, D.; Li, J.; Guo, Y.; Cheng, M.; Huang, P.; Cao, X.; Wang, C. Pairwise registration of TLS point clouds using covariance descriptors and a non-cooperative game. ISPRS J. Photogramm. Remote Sens. 2017, 134, 15–29. [Google Scholar] [CrossRef]
- Dong, Z.; Yang, B.; Liang, F.; Huang, R.; Scherer, S. Hierarchical registration of unordered TLS point clouds based on binary shape context descriptor. ISPRS J. Photogramm. Remote Sens. 2018, 144, 61–79. [Google Scholar] [CrossRef]
- Von Hansen, W. Robust automatic marker-free registration of terrestrial scan data. Proc. Photogramm. Comput. Vis 2006, 36, 105–110. [Google Scholar]
- Theiler, P.; Schindler, K. Automatic registration of terrestrial laser scanner point clouds using natural planar surfaces. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 3, 173–178. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, C.; Chen, B.; Zai, D.; Li, J. Facet segmentation-based line segment extraction for large-scale point clouds. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4839–4854. [Google Scholar] [CrossRef]
- Yang, B.; Dong, Z.; Liang, F.; Liu, Y. Automatic registration of large-scale urban scene point clouds based on semantic feature points. ISPRS J. Photogramm. Remote Sens. 2016, 113, 43–58. [Google Scholar] [CrossRef]
- Aiger, D.; Mitra, N.J.; Cohen-Or, D. 4-points congruent sets for robust pairwise surface registration. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar] [CrossRef]
- Mellado, N.; Aiger, D.; Mitra, N.J. Super 4PCs fast global pointcloud registration via smart indexing. Comput. Graph. Forum 2014, 33, 205–215. [Google Scholar] [CrossRef]
- Mohamad, M.; Ahmed, M.T.; Rappaport, D.; Greenspan, M. Super generalized 4pcs for 3d registration. In Proceedings of the International Conference on 3D Vision, Lyon, France, 19–22 October 2015; pp. 598–606. [Google Scholar]
- Mohamad, M.; Rappaport, D.; Greenspan, M. Generalized 4-points congruent sets for 3d registration. In Proceedings of the 2nd International Conference on 3D Vision, Tokyo, Japan, 8–11 December 2014; pp. 83–90. [Google Scholar]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Keypoint-based 4-Points Congruent Sets–Automated marker-less registration of laser scans. ISPRS J. Photogramm. Remote Sens. 2014, 96, 149–163. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Fast registration of laser scans with 4-point congruent sets-what works and what doesn’t. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 149–156. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Globally consistent registration of terrestrial laser scans via graph optimization. ISPRS J. Photogramm. Remote Sens. 2015, 109, 126–138. [Google Scholar] [CrossRef]
- Ge, X. Non-rigid registration of 3D point clouds under isometric deformation. ISPRS J. Photogramm. Remote Sens. 2016, 121, 192–202. [Google Scholar] [CrossRef]
- Ge, X. Automatic markerless registration of point clouds with semantic-keypoint-based 4-points congruent sets. ISPRS J. Photogramm. Remote Sens. 2017, 130, 344–357. [Google Scholar] [CrossRef]
- Xu, Z.; Xu, E.; Zhang, Z.; Wu, L. Multi-Scale Sparse Features Embedded 4-Points Congruent Sets for Global Registration of TLS Point Clouds. Geosci. Remote Sens. Lett. 2018, 16, 186–190. [Google Scholar]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Granger, S.; Pennec, X. Multi-scale EM-ICP: A fast and robust approach for surface registration. In Proceedings of the European Conference on Computer Vision, Copenhagen, Denmark, 28–31 May 2002; pp. 418–432. [Google Scholar]
- Yang, J.; Li, H.; Campbell, D.; Jia, Y. Go-ICP: A globally optimal solution to 3D ICP point-set registration. arXiv, 2016; arXiv:1605.03344. [Google Scholar]
- Pomerleau, F.; Colas, F.; Siegwart, R.; Magnenat, S. Comparing ICP variants on real-world data sets. Auton. Robots 2013, 34, 133–148. [Google Scholar] [CrossRef]
- Chetverikov, D.; Stepanov, D.; Krsek, P. Robust Euclidean alignment of 3D point sets: The trimmed iterative closest point algorithm. Image Vis. Comput. 2005, 23, 299–309. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Rusinkiewicz, S.; Levoy, M. Efficient variants of the ICP algorithm. In Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling, Quebec City, QC, Canada, 28 May–1 June 2001; pp. 145–152. [Google Scholar]
- Xu, Z.; Wu, L.; Chen, S. Method of engineering volume monitoring and calculation for open-pit mine from UAV images. J. Northeast. Univ. Nat. Sci. 2016, 37, 84–88. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3D registration. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 3212–3217. [Google Scholar]
- Weinmann, M.; Urban, S.; Hinz, S.; Jutzi, B.; Mallet, C. Distinctive 2D and 3D features for automated large-scale scene analysis in urban areas. Comput. Graph. 2015, 49, 47–57. [Google Scholar] [CrossRef]
- Assfalg, J.; Bertini, M.; Del Bimbo, A.; Pala, P. Content-based retrieval of 3-D objects using spin image signatures. IEEE Trans. Multimedia 2007, 9, 589–599. [Google Scholar] [CrossRef]
- Li, Y.; Snavely, N.; Huttenlocher, D.; Fua, P. Worldwide pose estimation using 3d point clouds. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; pp. 15–29. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Range | 5–3100 m |
| Pulse repetition rate | 100 kHz |
| Effective measurement rate | 74,000 points per second |
| Laser beam divergence | 0.12 mrad |
| Laser beam footprint | 70 mm to 500 m, 140 mm to 1000 m, 280 mm to 2000 m |
| Range accuracy | 15 mm to 150 m, 12 mm increase of beam width pre 100 m of range |
| Scanning resolution | 0.02° × 0.014° (horizontal × vertical) |
| Repeatability/Precision | 10 mm |
| TLS Survey | Point Resolution (m) | RMSE Value between Overlapping Scans (m) | |||
|---|---|---|---|---|---|
| 1st to 2nd | 1st to 3rd | 2nd to 3rd | Average | ||
| Site A: 12 September 2017 | 0.8 | 0.44 | 0.46 | 0.51 | 0.47 |
| Site A: 12 October 2017 | 0.8 | 0.38 | 0.39 | 0.37 | 0.38 |
| Site B: 13 March 2013 | 1.5 | 0.83 | 0.89 | 0.79 | 0.84 |
| Site B: 10 July 2013 | 1.5 | 1.24 | 0.91 | 1.00 | 1.05 |
| Basic Information | RMSE Values (m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Point Resolution (m) | Area (km2) | Number of Points | Registration Method | ||||||
| Manual-Based | Super4PCS | MSSF-Super4PCS | Super4PCS+ICP ★ | MSSF-Super4PCS+ICP ★ | Our Method | ||||
| a1 | 0.60 | 0.075 | 10,911 | 0.43 | 0.64 | 0.61 | 0.59 (+0.05) | 0.55 (+0.06) | 0.42 |
| a2 | 0.59 | 0.057 | 8515 | 0.40 | 0.65 | 0.41 | 0.97 (−0.32) | 0.94 (−0.53) | 0.39 |
| a3 | 0.57 | 0.048 | 8379 | 0.42 | 0.86 | 0.46 | 1.18 (−0.32) | 1.16 (−0.70) | 0.42 |
| a4 | 0.60 | 0.052 | 7412 | 0.48 | 0.71 | 0.58 | 1.30 (−0.59) | 1.14 (−0.43) | 0.48 |
| Ave. | 0.60 | 0.058 | 8804 | 0.43 | 0.72 | 0.52 | 1.01 (−0.29) | 0.95 (−0.43) | 0.43 |
| b1 | 1.26 | 0.321 | 18,702 | 0.85 | 3.74 | 4.38 | 2.91 (+0.83) | 2.90 (+1.48) | 0.85 |
| b2 | 1.35 | 0.106 | 6335 | 0.94 | 2.7 | 1.30 | 4.29 (−1.59) | 4.41 (−3.11) | 0.96 |
| b3 | 1.24 | 0.083 | 4693 | 0.81 | 2.55 | 3.56 | 4.67 (−1.12) | 4.73 (−1.17) | 0.80 |
| Ave. | 1.25 | 0.170 | 9910 | 0.87 | 3 | 3.08 | 3.96 (−0.96) | 4.01 (−0.93) | 0.87 |
| Ore Type | Our Method (×103 kg) | In-Situ Quality (×103 kg) | Error (×103 kg) | Accuracy (%) | Overall Accuracy (%) |
|---|---|---|---|---|---|
| Type I | 654,050.65 | 603,185 | 50,865.65 | 91.57 | 98.03 |
| Type II | 1,633,763.26 | 1,640,477 | −6713.74 | 99.59 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Xu, E.; Wu, L.; Liu, S.; Mao, Y. Registration of Terrestrial Laser Scanning Surveys Using Terrain-Invariant Regions for Measuring Exploitative Volumes over Open-Pit Mines. Remote Sens. 2019, 11, 606. https://doi.org/10.3390/rs11060606
Xu Z, Xu E, Wu L, Liu S, Mao Y. Registration of Terrestrial Laser Scanning Surveys Using Terrain-Invariant Regions for Measuring Exploitative Volumes over Open-Pit Mines. Remote Sensing. 2019; 11(6):606. https://doi.org/10.3390/rs11060606
Chicago/Turabian StyleXu, Zhihua, Ershuai Xu, Lixin Wu, Shanjun Liu, and Yachun Mao. 2019. "Registration of Terrestrial Laser Scanning Surveys Using Terrain-Invariant Regions for Measuring Exploitative Volumes over Open-Pit Mines" Remote Sensing 11, no. 6: 606. https://doi.org/10.3390/rs11060606