Quantifying Lodging Percentage and Lodging Severity Using a UAV-Based Canopy Height Model Combined with an Objective Threshold Approach

 ,
,  , , and
, , and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Unmanned Aerial Vehicle Platform and Sensor
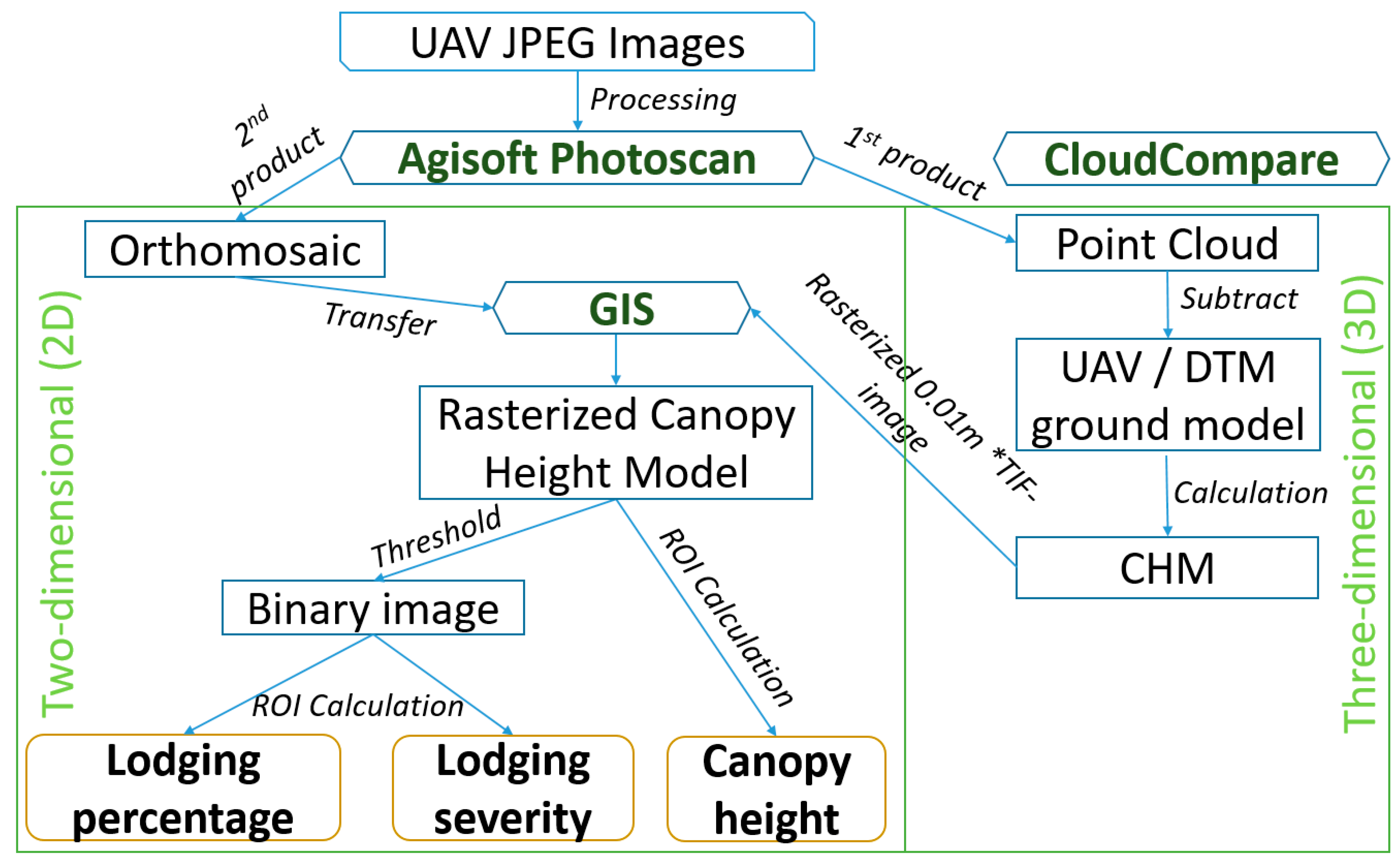
2.3. Data Processing and Canopy Height Model Generation
- Ground model determination based on a UAV overflight shortly after sowing or after harvest (UAV-based ground model), and
- Ground model determination based on a DTM provided by state authorities (DTM-based ground model).
2.4. Unmanned Aerial Vehicle Canopy Height Assessment and Validation
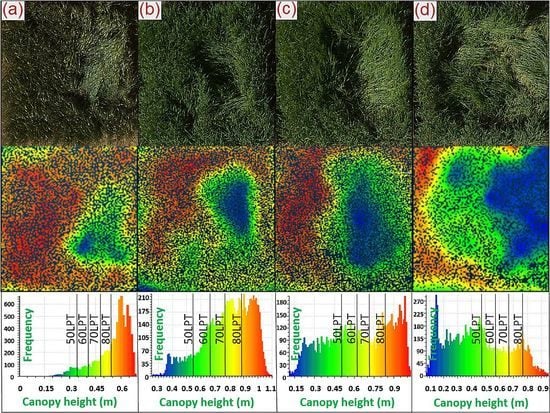
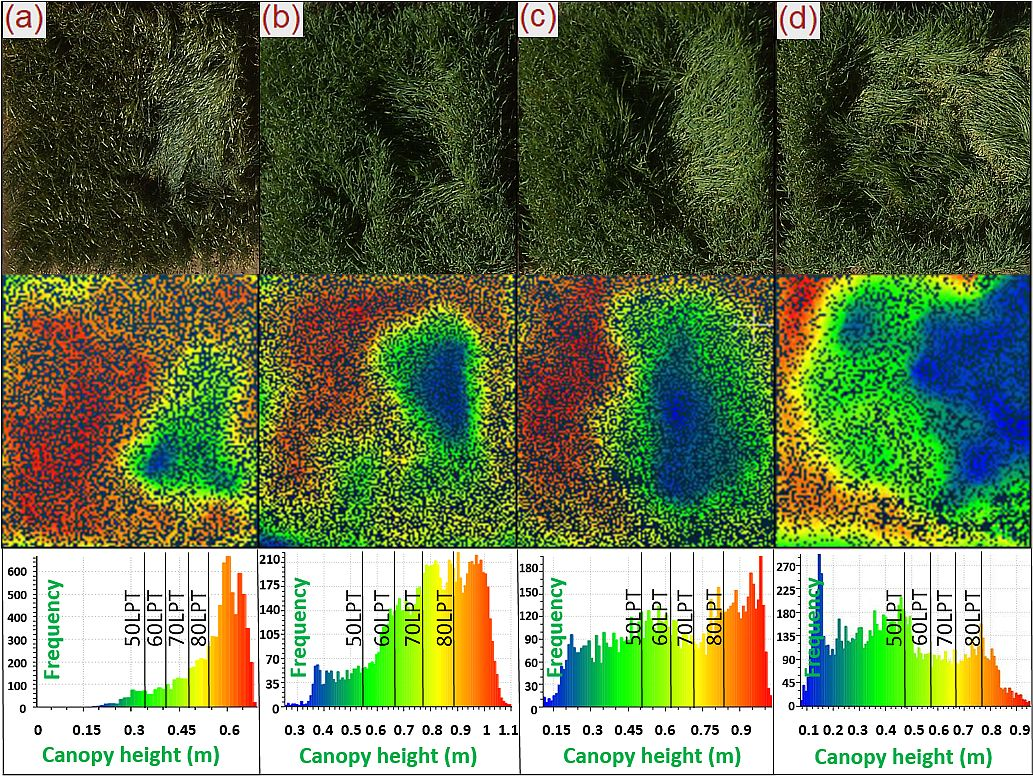
2.5. Lodging Assessment and Validation
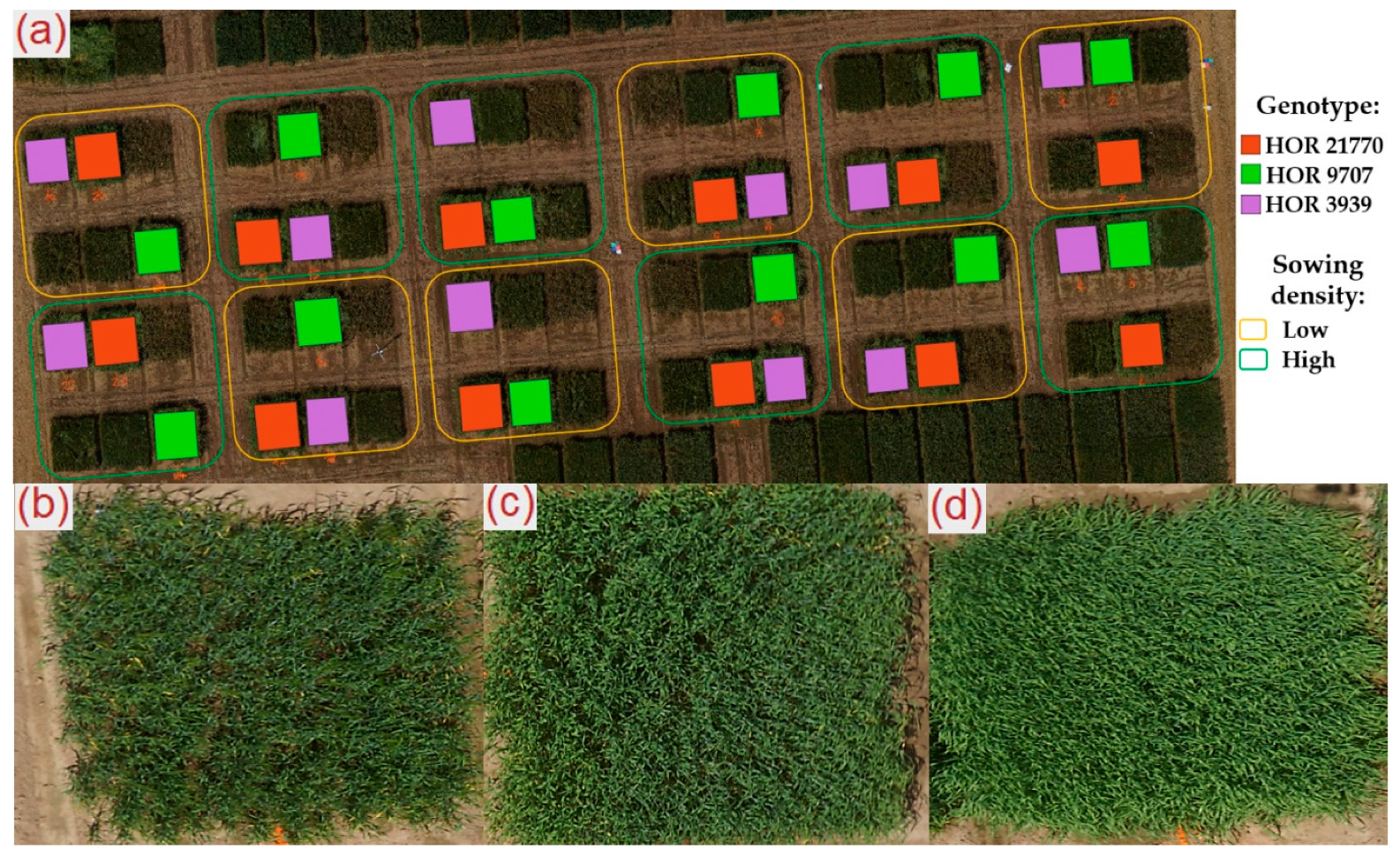
2.5.1. Experimental Site 1: Breeding Trials
2.5.2. Experimental Site 2: Farmer Field
3. Results and Analysis
3.1. Comparison of Plant Traits Derived from Unmanned Aerial Vehicle- and Digital Terrain Model-Based Ground Models
3.2. Unmanned Aerial Vehicle Canopy Height Assessment and Validation
3.3. Lodging Assessment and Validation
3.3.1. Experimental Site 1: Breeding Trials
3.3.2. Experimental Site 2: Farmer Field
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Atzberger, C. Advances in remote sensing of agriculture: Context description, existing operational monitoring systems and major information needs. Remote Sens. 2013, 5, 949–981. [Google Scholar] [CrossRef]
- Siegmann, B.; Jarmer, T. Comparison of different regression models and validation techniques for the assessment of wheat leaf area index from hyperspectral data. Int. J. Remote Sens. 2015, 36, 4519–4534. [Google Scholar] [CrossRef]
- Burkart, A.; Hecht, V.L.; Kraska, T.; Rascher, U. Phenological analysis of unmanned aerial vehicle based time series of barley imagery with high temporal resolution. Precis. Agric. 2017, 19, 134–146. [Google Scholar] [CrossRef]
- Gómez-Candón, D.; De Castro, A.I.; López-Granados, F. Assessing the accuracy of mosaics from unmanned aerial vehicle (UAV) imagery for precision agriculture purposes in wheat. Precis. Agric. 2014, 15, 44–56. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Candiago, S.; Remondino, F.; Giglio, M.; De Dubbini, M.; Gattelli, M. Evaluating Multispectral Images and Vegetation Indices for Precision Farming Applications from UAV Images. Remote Sens. 2015, 7, 4026–4047. [Google Scholar] [CrossRef] [Green Version]
- Grenzdörffer, G.; Engel, A.; Teichert, B. The photogrammetric potential of low-cost UAVs in forestry and agriculture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 1, 1207–1213. [Google Scholar] [CrossRef]
- Eling, C.; Wieland, M.; Hess, C.; Klingbeil, L.; Kuhlmann, H. Development and evaluation of a UAV based mapping system for remote sensing and surveying applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2015, 40, 233–239. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: The structure from motion approach on coastal environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef]
- Hodgson, J.C.; Baylis, S.M.; Mott, R.; Herrod, A.; Clarke, R.H. Precision wildlife monitoring using unmanned aerial vehicles. Sci. Rep. 2016. [Google Scholar] [CrossRef] [PubMed]
- Dandois, J.P.; Ellis, E.C. High spatial resolution three-dimensional mapping of vegetation spectral dynamics using computer vision. Remote Sens. Environ. 2013. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; Watson, C. An automated technique for generating georectified mosaics from ultra-high resolution Unmanned Aerial Vehicle (UAV) imagery, based on Structure from Motion (SFM) point clouds. Remote Sens. 2012, 4, 1392–1410. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Chu, T.; Starek, M.J.; Brewer, M.J.; Murray, S.C.; Pruter, L.S. Assessing lodging severity over an experimental maize (Zea mays L.) field using UAS images. Remote Sens. 2017, 9, 923. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bareth, G. UAV-based Imaging for Multi-Temporal, very high Resolution Crop Surface Models to monitor Crop Growth Variability. Photogramm.-Fernerkund.-Geoinf. 2013, 6, 551–562. [Google Scholar] [CrossRef]
- Li, Z. On the measure of digital terrain model accuracy. Photogramm. Rec. 1988. [Google Scholar] [CrossRef]
- Podobnikar, T. Methods for visual quality assessment of a digital terrain model. Surv. Perspect. Integrating Environ. Soc. 2009, 1, 1–24. [Google Scholar] [CrossRef]
- Hirt, C. Digital Terrain Models; Springer International Publishing: Berlin, Germany, 2014; pp. 1–6. [Google Scholar] [CrossRef]
- Kraus, K.; Briese, C.; Attwenger, M.E.; Pfeifer, N. Quality Measures for Digital Terrain Models; The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences: Hannover, Germany, 2004. [Google Scholar]
- Anthony, D.; Elbaum, S.; Lorenz, A.; Detweiler, C. On crop height estimation with UAVs. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- De Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Height estimation of sugarcane using an unmanned aerial system (UAS) based on structure from motion (SfM) point clouds. Int. J. Remote Sens. 2017. [Google Scholar] [CrossRef]
- Stanton, C.; Starek, M.J.; Elliott, N.; Brewer, M.; Maeda, M.M.; Chu, T. Unmanned aircraft system-derived crop height and normalized difference vegetation index metrics for sorghum yield and aphid stress assessment. J. Appl. Remote Sens. 2017. [Google Scholar] [CrossRef]
- Chu, T.; Starek, M.J.; Brewer, M.J.; Masiane, T.; Murray, S.C. UAS imaging for automated crop lodging detection: A case study over an experimental maize field. SPIE Commer. Sci. Sens. Imaging 2017. [Google Scholar] [CrossRef]
- Holman, F.H.; Riche, A.B.; Michalski, A.; Castle, M.; Wooster, M.J.; Hawkesford, M.J. High throughput field phenotyping of wheat plant height and growth rate in field plot trials using UAV based remote sensing. Remote Sens. 2016, 8, 1031. [Google Scholar] [CrossRef]
- Bendig, J.; Yu, K.; Aasen, H.; Bolten, A.; Bennertz, S.; Broscheit, J.; Gnyp, M.L.; Bareth, G. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley. Int. J. Appl. Earth Obs. Geoinf. 2015, 39, 79–87. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating biomass of barley using crop surface models (CSMs) derived from UAV-based RGB imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef]
- Adamchuk, V.I.; Ferguson, R.B.; Hergert, G.W. Soil Heterogeneity and Crop Growth. In Precision Crop Protection-the Challenge and Use of Heterogeneity; Oerke, E.-C., Gerhards, R., Menz, G., Sikora, R.A., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 3–16. ISBN 978-90-481-9277-9. [Google Scholar]
- Shanahan, J.F.; Schepers, J.S.; Francis, D.D.; Varvel, G.E.; Wilhelm, W.W.; Tringe, J.M.; Schlemmer, M.R.; Major, D.J. Use of remote-sensing imagery to estimate corn grain yield. Agron. J. 2001. [Google Scholar] [CrossRef]
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013. [Google Scholar] [CrossRef]
- Hansen, P.M.; Schjoerring, J.K. Reflectance measurement of canopy biomass and nitrogen status in wheat crops using normalized difference vegetation indices and partial least squares regression. Remote Sens. Environ. 2003. [Google Scholar] [CrossRef]
- Bareth, G.; Aasen, H.; Bendig, J.; Gnyp, M.L.; Bolten, A.; Jung, A.; Michels, R.; Soukkamäki, J. Low-weight and UAV-based Hyperspectral Full-frame Cameras for Monitoring Crops: Spectral Comparison with Portable Spectroradiometer Measurements. Photogramm.-Fernerkund.-Geoinf. 2015. [Google Scholar] [CrossRef]
- Bendig, J.V. Unmanned Aerial Vehicles (UAVs) for Multi-Temporal Crop Surface Modelling. Ph.D. Thesis, Universität zu Köln, Cologne, Germany, 2015. [Google Scholar]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015. [Google Scholar] [CrossRef]
- Berry, P.M.; Spink, J. Predicting yield losses caused by lodging in wheat. Field. Crops Res. 2012, 137, 19–26. [Google Scholar] [CrossRef]
- Rajapaksa, S.; Eramian, M.; Duddu, H.; Wang, M.; Shirtliffe, S.; Ryu, S.; Josuttes, A.; Zhang, T.; Vail, S.; Pozniak, C.; et al. Classification of Crop Lodging with Gray Level Co-occurrence Matrix. In Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision (WACV) (2018), Lake Tahoe, NV, USA, 12–15 March 2018. [Google Scholar] [CrossRef]
- Peng, D.; Chen, X.; Yin, Y.; Lu, K.; Yang, W.; Tang, Y.; Wang, Z. Lodging resistance of winter wheat (Triticum aestivum L.): Lignin accumulation and its related enzymes activities due to the application of paclobutrazol or gibberellin acid. Field. Crop. Res. 2014. [Google Scholar] [CrossRef]
- Pinthus, M.J. Lodging in Wheat, Barley, and Oats: The Phenomenon, its Causes, and Preventive Measures. Adv. Agron. 1974. [Google Scholar] [CrossRef]
- Weibel, R.O.; Pendleton, J.W. Effect of Artificial Lodging on Winter Wheat Grain Yield and Quality (AJ). Agron. J. 1964, 48, 452–455. [Google Scholar] [CrossRef]
- Fischer, R.A.; Stapper, M. Lodging effects on high-yielding crops of irrigated semidwarf wheat. Field. Crop. Res. 1987, 17, 245–258. [Google Scholar] [CrossRef]
- Berry, P.M.; Sterling, M.; Spink, J.H.; Baker, C.J.; Sylvester-Bradley, R.; Mooney, S.J.; Tams, A.R.; Ennos, A.R. Understanding and Reducing Lodging in Cereals. Adv. Agron. 2004, 84, 215–269. [Google Scholar]
- Briggs, K.G. Several Six-Row Barley Cultivars. AGRIS 1990, 181, 173–181. [Google Scholar] [CrossRef]
- Grant, B.L. Types of Plant Lodging: Treating Plants Affected by Lodging. Available online: https://www.gardeningknowhow.com/edible/vegetables/vgen/plants-affected-by-lodging.htm/?print=1&loc=top (accessed on 28 January 2019).
- Susko, A.Q.; Gilbertson, F.; Heuschele, D.J.; Smith, K.; Marchetto, P. An automatable, field camera track system for phenotyping crop lodging and crop movement. HardwareX 2018, 4. [Google Scholar] [CrossRef]
- Liu, T.; Li, R.; Zhong, X.; Jiang, M.; Jin, X.; Zhou, P.; Liu, S.; Sun, C.; Guo, W. Estimates of rice lodging using indices derived from UAV visible and thermal infrared images. Agric. For. Meteorol. 2018, 252, 144–154. [Google Scholar] [CrossRef]
- Yang, M.D.; Huang, K.S.; Kuo, Y.H.; Tsai, H.; Lin, L.M. Spatial and spectral hybrid image classification for rice lodging assessment through UAV imagery. Remote Sens. 2017, 9, 583. [Google Scholar] [CrossRef]
- Murakami, T.; Yui, M.; Amaha, K. Canopy height measurement by photogrammetric analysis of aerial images: Application to buckwheat (Fagopyrum esculentum Moench) lodging evaluation. Comput. Electron. Agric. 2012, 89, 70–75. [Google Scholar] [CrossRef]
- Chapman, S.; Merz, T.; Chan, A.; Jackway, P.; Hrabar, S.; Dreccer, M.; Holland, E.; Zheng, B.; Ling, T.; Jimenez-Berni, J. Pheno-Copter: A Low-Altitude, Autonomous Remote-Sensing Robotic Helicopter for High-Throughput Field-Based Phenotyping. Agronomy 2014, 4, 279–301. [Google Scholar] [CrossRef] [Green Version]
- Michael, P.M. Predicting Lodging in Winter Wheat. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 1998. [Google Scholar]
- Simko, I.; Piepho, H.P. Combining phenotypic data from ordinal rating scales in multiple plant experiments. Trends Plant Sci. 2011, 16, 235–237. [Google Scholar] [CrossRef] [PubMed]
- Wilke, N.; Siegmann, B.; Burkard, A.; Klingbeil, L.; Rascher, U. Quantifizierung der Ährenanzahl mittels UAV gestützter Bildaufnahmen. Wissenschaftlich-Technische Jahrestagung der DGPF und PFGK18 Tagung in München 2018, 38, 274–284. [Google Scholar]
- Burkart, A.; Aasen, H.; Alonso, L.; Menz, G.; Bareth, G.; Rascher, U. Angular dependency of hyperspectral measurements over wheat characterized by a novel UAV based goniometer. Remote Sens. 2015, 7, 725–746. [Google Scholar] [CrossRef]
- Bláha, M.; Eisenbeiss, H.; Grimm, D.; Limpach, P. Direct georeferencing of uavs. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012. [Google Scholar] [CrossRef]
- Agisoft, L.L.C. Agisoft Agisoft PhotoScan User Manual. Available online: http://www. agisoft. ru/pscan/help/en/pscan_pro. pdf (accessed on 3 May 2011).
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Kersten, T.P. Auf Knopfdruck–Auswertung und Resultate UAV-gestützter Bildflugdaten. UAV 2016-Vermessung Mit Unbemannten Flugsystemen Schriftenr. Des DVW 2016, 82, 135–158. [Google Scholar]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure- from- Motion’ photogrammetry: A low- cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Danielgm.net CloudCompare: 3D Point Cloud and Mesh Processing Software, Open Source Project. Available online: http://www.danielgm.net/cc/ (accessed on 3 December 2018).
- Land NRW: Datenlizenz Deutschland - Namensnennung - Version 2.0. Available online: www.govdata.de/dl-de/by-2-0 (accessed on 3 January 2019).
- Jackson, R.D.; Hatfield, J.L.; Reginato, R.J.; Idso, S.B.; Pinter, P.J. Estimation of daily evapotranspiration from one time-of-day measurements. Agric. Water Manag. 1983. [Google Scholar] [CrossRef]
- Navabi, A.; Iqbal, M.; Strenzke, K.; Spaner, D. The relationship between lodging and plant height in a diverse wheat population. Can. J. Plant Sci. 2006, 86, 723–726. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lodging Percentage (%) | ||
|---|---|---|
| UAV-Based Ground Model | DTM-Based Ground Model | Reference Data |
| 71.81 | 75.06 | 70.27 |
| Genotype | Sowing Density | Median and SD (m) | Discrepancy between Reference Measurements and UAV CH (m) | |
|---|---|---|---|---|
| Reference Measurements | UAV CH | |||
| HOR 3939 | Low | 0.96 ± 0.02 | 0.67 ± 0.08 | (−) 0.29 |
| HOR 9707 | 1.00 ± 0.04 | 0.92 ± 0.05 | (−) 0.08 | |
| HOR 21770 | 0.93 ± 0.02 | 0.90 ± 0.05 | (−) 0.03 | |
| HOR 3939 | High | 0.94 ± 0.05 | 0.76 ± 0.06 | (−) 0.18 |
| HOR 9707 | 1.02 ± 0.03 | 0.99 ± 0.04 | (−) 0.03 | |
| HOR 21770 | 0.93 ± 0.01 | 0.92 ± 0.01 | (−) 0.01 | |
| Genotype | Sowing Density | MAXCH (m) | Lodging Percentage (%) | Lodging Severity (%) | |||||
|---|---|---|---|---|---|---|---|---|---|
| 80 LPT | 70 LPT | 60 LPT | 50 LPT | Reference Data | WALS | ALS | |||
| HOR 3939 | Low | 0.72 | 74.70 | 59.94 | 41.74 | 20.76 | 53.97 | 43.66 | 49.29 |
| HOR 9707 | 0.79 | 84.90 | 70.54 | 54.35 | 34.48 | 70.54 | 55.84 | 61.07 | |
| HOR 21770 | 1.12 | 44.59 | 26.86 | 16.21 | 9.77 | 24.81 | 20.76 | 24.35 | |
| HOR 3939 | High | 0.66 | 94.52 | 86.90 | 73.00 | 50.10 | 77.27 | 71.53 | 76.13 |
| HOR 9707 | 0.68 | 98.10 | 92.86 | 80.94 | 58.44 | 73.28 | 78.49 | 82.58 | |
| HOR 21770 | 1.03 | 92.45 | 85.75 | 78.30 | 69.37 | 80.90 | 79.07 | 81.47 | |
| GSD (cm) | Lodging Percentage (%) | Lodging Severity (%) | Reference Data | ||||
|---|---|---|---|---|---|---|---|
| 80LPT | 70LPT | 60LPT | 50LPT | WALS | ALS | ||
| 0.54 | 88.83 | 71.81 | 66.69 | 64.75 | 70.61 | 73.02 | 70.27 |
| 1.09 | 89.79 | 78.04 | 68.11 | 64.36 | 72.38 | 75.08 | |
| 1.57 | 87.35 | 78.51 | 73.05 | 68.60 | 74.95 | 76.88 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wilke, N.; Siegmann, B.; Klingbeil, L.; Burkart, A.; Kraska, T.; Muller, O.; van Doorn, A.; Heinemann, S.; Rascher, U. Quantifying Lodging Percentage and Lodging Severity Using a UAV-Based Canopy Height Model Combined with an Objective Threshold Approach. Remote Sens. 2019, 11, 515. https://doi.org/10.3390/rs11050515
Wilke N, Siegmann B, Klingbeil L, Burkart A, Kraska T, Muller O, van Doorn A, Heinemann S, Rascher U. Quantifying Lodging Percentage and Lodging Severity Using a UAV-Based Canopy Height Model Combined with an Objective Threshold Approach. Remote Sensing. 2019; 11(5):515. https://doi.org/10.3390/rs11050515
Chicago/Turabian StyleWilke, Norman, Bastian Siegmann, Lasse Klingbeil, Andreas Burkart, Thorsten Kraska, Onno Muller, Anna van Doorn, Sascha Heinemann, and Uwe Rascher. 2019. "Quantifying Lodging Percentage and Lodging Severity Using a UAV-Based Canopy Height Model Combined with an Objective Threshold Approach" Remote Sensing 11, no. 5: 515. https://doi.org/10.3390/rs11050515