1. Introduction
Inland lakes and reservoirs are a vital source of freshwater to both human and ecological systems in order to sustain life. In addition, human activity is dependent on sources of water through agriculture, industry, and electricity. Variability in weather and climate, borne out by variability in temperature, wind, and precipitation, directly influences the amount of water that lakes loose or gain which in turn can result in basin changes and either positive or negative feedback on both the local and global climate. Meteorological changes, whether short or long-term will impact not only the physical state of lakes but also its chemical and biological state. How sensitive a lake is to these changes is to a large extent dependent on the morphology of the lake (e.g., larger lakes tend to be more affected by wind at the surface due to greater fetch which in turn results in greater mixing). On the other hand, smaller lakes respond more strongly to thermal processes such as diurnal heating and cooling. Studying and monitoring variations and trends in lake area, or lake water extent (LWE) can therefore be an important tool in identifying climatic variations over time since this physical parameter is regulated by changes in climate. Hence, changes in LWE can be indicators of climate variations since they are sensitive to changes in water and heat balance.
Synthetic aperture radar (SAR) data have in recent years shown strong potential as an important tool in detecting and monitoring surface water changes since the launch of the Sentinel-1A and B satellites. These satellites provide free data at high spatial and temporal resolution at regular intervals. In particular at high latitudes where Sentinel-1 provides close to daily imagery, SAR is advantageous for imaging of the Earth’s surface since images can be acquired regardless of prevailing light and cloud cover conditions, when the use of optical sensors is often limited due to prolonged periods of darkness during winter and periods of poor weather occurring throughout the year.
Due to its sensitivity to climatic variations, LWE has been identified as an essential climate variable (ECV) as defined by The Global Climate Observing System (GCOS). The GCOS requirements for LWE as a satellite-derived ECV is daily frequency, 20 m spatial resolution, and 10% relative accuracy. Due to cloud cover often affecting optical images it is clear that only SAR instruments can achieve these requirements on a global scale. Radar altimeters measure lake water level (LWL) directly, however if the hypsometric curve of the lake is also known, then measurements of LWL can also be used to derive LWE but the repetition frequency can range from 10 to 27 days using for example, Jason-3 and Sentinel-3A and B, respectively. However, since many lakes are crossed by several altimeter tracks from several satellite missions, the combination of the different data sources can increase the temporal sampling of the lakes [
1,
2].
Earlier studies have documented the application and potential of SAR data for monitoring surface water occurrence and dynamics. In the case of still open water, strong specular reflection occurs at the surface, thereby returning little of the incident wave back to the radar. SAR backscatter from still water is therefore very low and water is often easily distinguished in SAR backscatter images since it appears very dark. For this reason, several simple thresholding techniques have been explored for this purpose since they are computationally efficient when large datasets are involved. For example, Xing et al. [
3] demonstrated the application of a simple threshold classification method on a single year of Sentinel-1 data in both VV (vertically transmitted, vertically received) and VH (vertically transmitted, horizontally received) polarizations to monitor monthly variations in surface water cover at Dongting Lake in China. Similarly, Miles et al. [
4] developed a semi-automatic algorithm to detect surface and subsurface lakes over Western Greenland. As with Xing et al. [
3], their threshold method based on pixel backscatter intensity was used to delineate water regions and produce binary water masks for the area of interest. A two-step thresholding procedure based on both pixel intensity and texture in RADARSAT dual polarization images was outlined by Bolanos et al. [
5], which were combined to detect and map non-vegetated water body occurrence in the Canadian prairies. Thresholding methods can therefore be effective for applications such as surface water detection and are most successful in cases with contrasting backscatter intensities from the different features that are being detected, and where the expected response from the features being detected is not very dynamic from image to image.
On the other hand, when there are multiple features in an image possessing similar backscatter characteristics or when environmental factors cause wide variation in the SAR backscatter over the lake and surrounding land, feature extraction by applying a fixed threshold may give less accurate results. Other studies have attempted to address these limitations by applying methods such as finite mixture models in combination with bilateral filtering [
6] for flood and surface water mapping. K-means clustering has been tested on vegetation indices derived from Moderate Resolution Imaging Spectroradiometer (MODIS) images at 250 m resolution in order to detect surface water, which was used in combination with radar altimetry to monitor reservoir storage for 34 global reservoirs [
7]. This approach was used because the reservoirs were surrounded by varying land cover types and these were associated with variable backscatter amplitudes. K-means clustering has also been applied to RADARSAT-2 and TerraSAR-X images to derive ice and water concentrations for 14 small arctic lakes [
8]. Wang et al. [
9] implemented the unsupervised, hierarchical region-based “glocal” Iterative Region Growing with Semantics (IRGS) algorithm [
10] to achieve ice-water classifications over very large lakes where statistical non-stationarities are present due to incidence angle effects. Though it was found that ice types could not be accurately determined using the algorithm, their classification accuracies were on average of the order of 90%. Bangira et al. [
11] applied several machine learning algorithms (MLAs) to features derived from Sentinel-1 and Sentinel-2 data and compared the outputs with automatic thresholding for the detection of complex water bodies in South Africa. While the MLAs were shown to outperform the thresholding results, the authors highlighted the limitation of needing representative training samples to be able to use the methods operationally and concluded that a dual thresholding based on the fusion of both optical and SAR data proved to be the best alternative as a universal method.
Lastly, neural networks have in recent years gained much popularity in detection applications, such as land cover classification [
12], ground military target detection [
13], sea ice concentration mapping [
14], and more recently avalanche detection [
15], having demonstrated their superiority over traditional image processing and machine learning methods in these applications. Several studies have already investigated the use of neural networks for surface water detection from Landsat imagery [
16,
17,
18,
19,
20] and Pham-Duc et al. [
21] documented promising results for flood mapping by using Sentinel-1 SAR data as inputs and Landsat-8 imagery as targets to train a neural network which was shown to give accurate water detection of >90% at 30 m resolution. However, there are still rather few studies dedicated to investigating the use of convolutional neural networks for surface water detection in SAR images, despite the clear advantages that SAR remote sensing has over its optical counterpart during low light periods and poor weather; thus, this is clearly still an area under development.
It is obvious there will be methods that are better suited to specific applications and case studies when compared with others that are more generic in nature, and similar to Gao et al. [
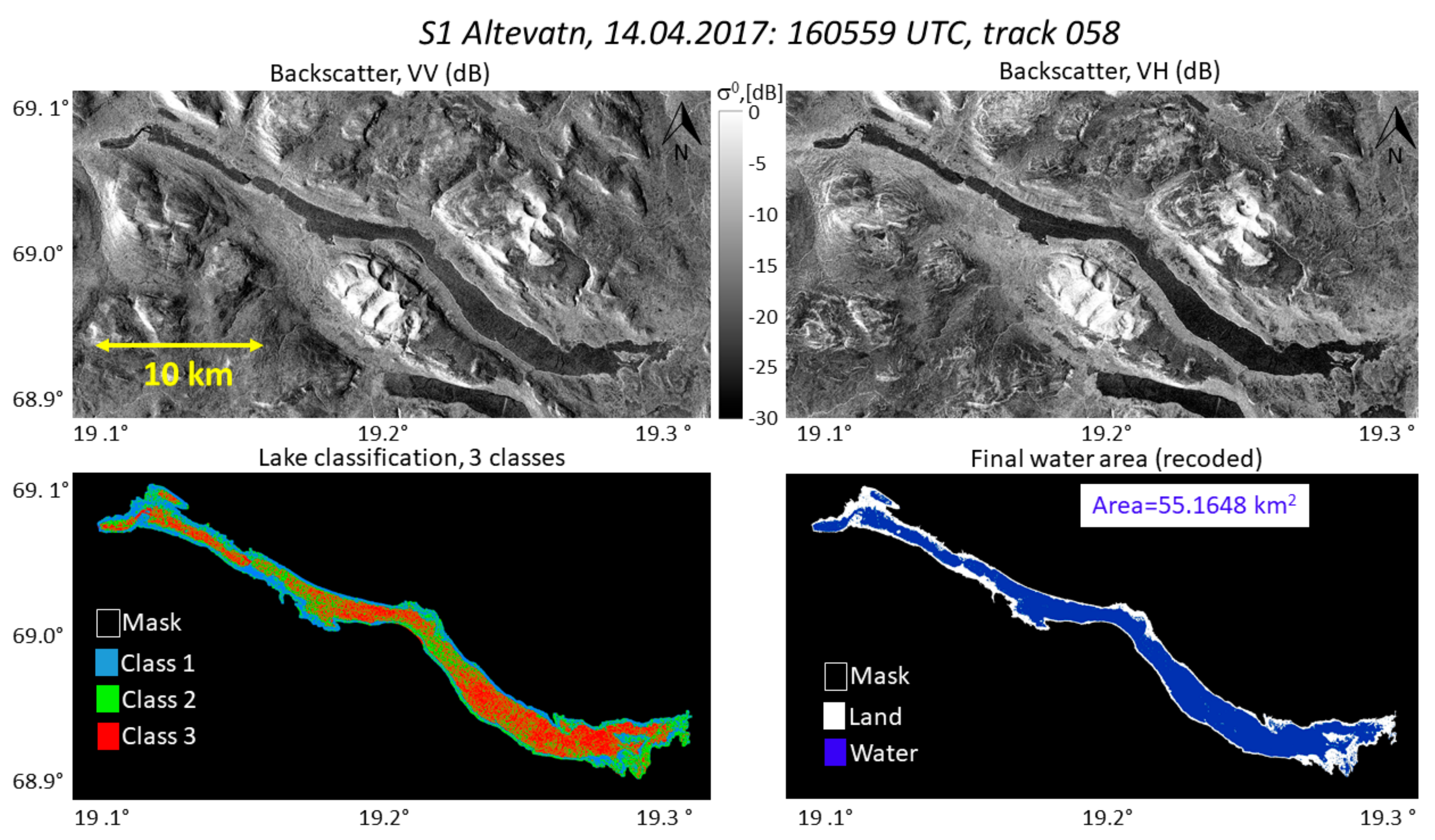
7] we investigate in this study the suitability of K-means unsupervised clustering as a method to detect the water extent in SAR images for a typical arctic lake. We have chosen to implement this method over the more widely used techniques that involve fixed thresholds due to the high variability in backscatter for surface water that occurs due to waves and/or snow and ice cover. The K-means method works by separating the data samples into a specified number of clusters of equal variance by minimizing the sum of the square difference between the data samples and cluster mean, thereby finding the best class thresholds suited to a given image. The adaptive nature of the algorithm will in general be superior to hard threshold methods and has the advantage that it requires no manual intervention and is not dependent on training data, thereby making it a suitable generic analysis method compared to supervised methods that are trained on images with specific environmental conditions.
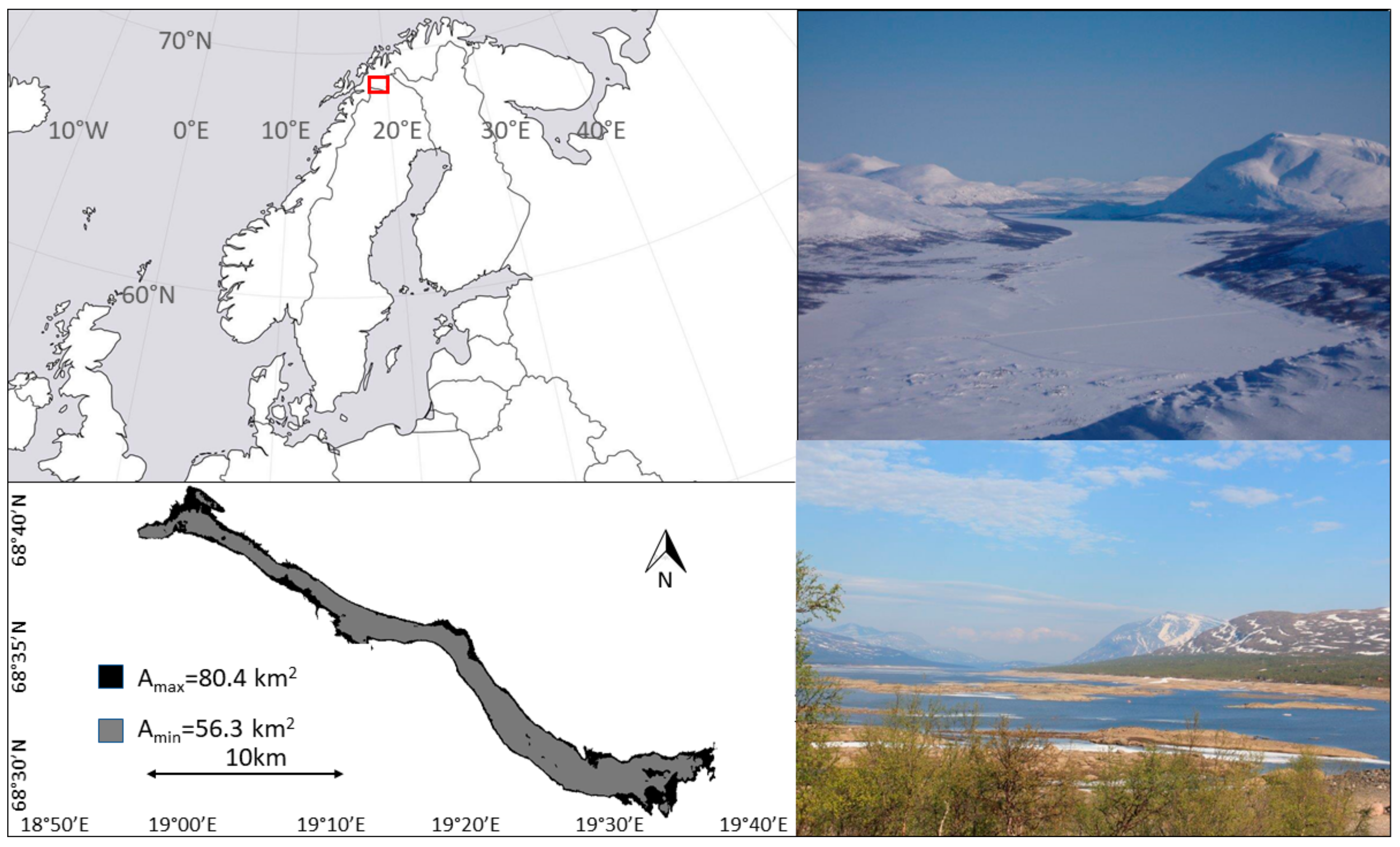
Altevatn (68.6N, 19.4E) is a medium-sized (79.71 km
2) hydropower reservoir located in Bardu municipality in Northern Norway and is the 11th largest lake in Norway, with a maximum length and width of approximately 45 km and 2.5 km, respectively. It is bordered by mountainous terrain to the north and south and its water level exhibits an annual variation between 473 meters above sea level (m.a.s.l0 and 489 m.a.s.l, typically lowest before snowmelt commences in May and highest after most of the snow has melted (August/September). This results in a significant increase in the surface area (57–78 km
2).
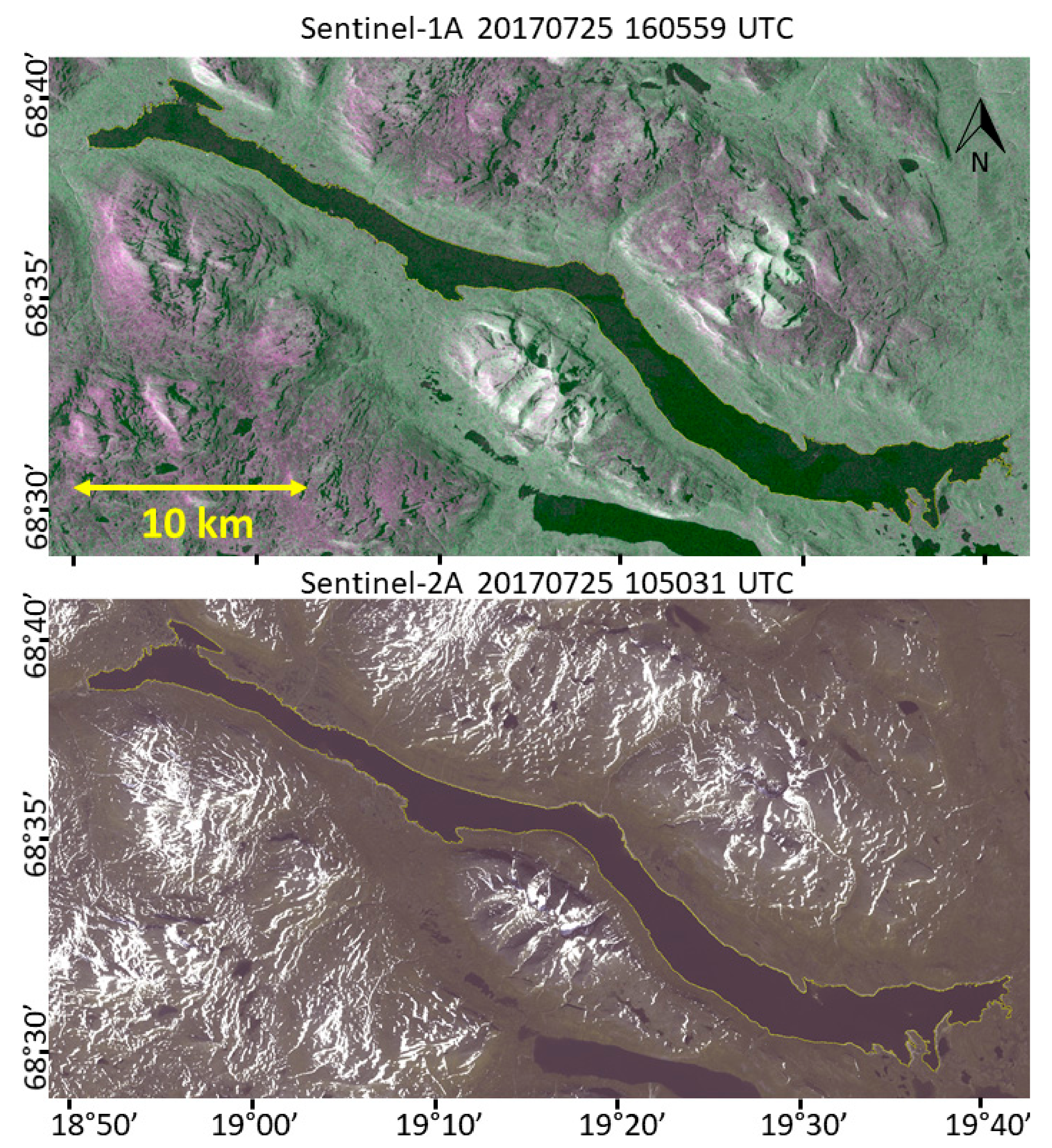
Figure 1 illustrates the geographic location of Altevatn and its surrounding terrain. Water stored in the lake is regulated by a dam at its northwestern end and discharges into the river Bardu, and eventually empties into Malangen fjord via Målselva (river). While Altevatn is a medium-sized lake in a global context, it is quite large as a Scandinavian hydropower reservoir. Due to the accurate in-situ measurements and dense time series of Earth Observation (EO) data we find this dataset well suited to demonstrate how long-term monitoring of LWE in medium-sized lakes may be facilitated.
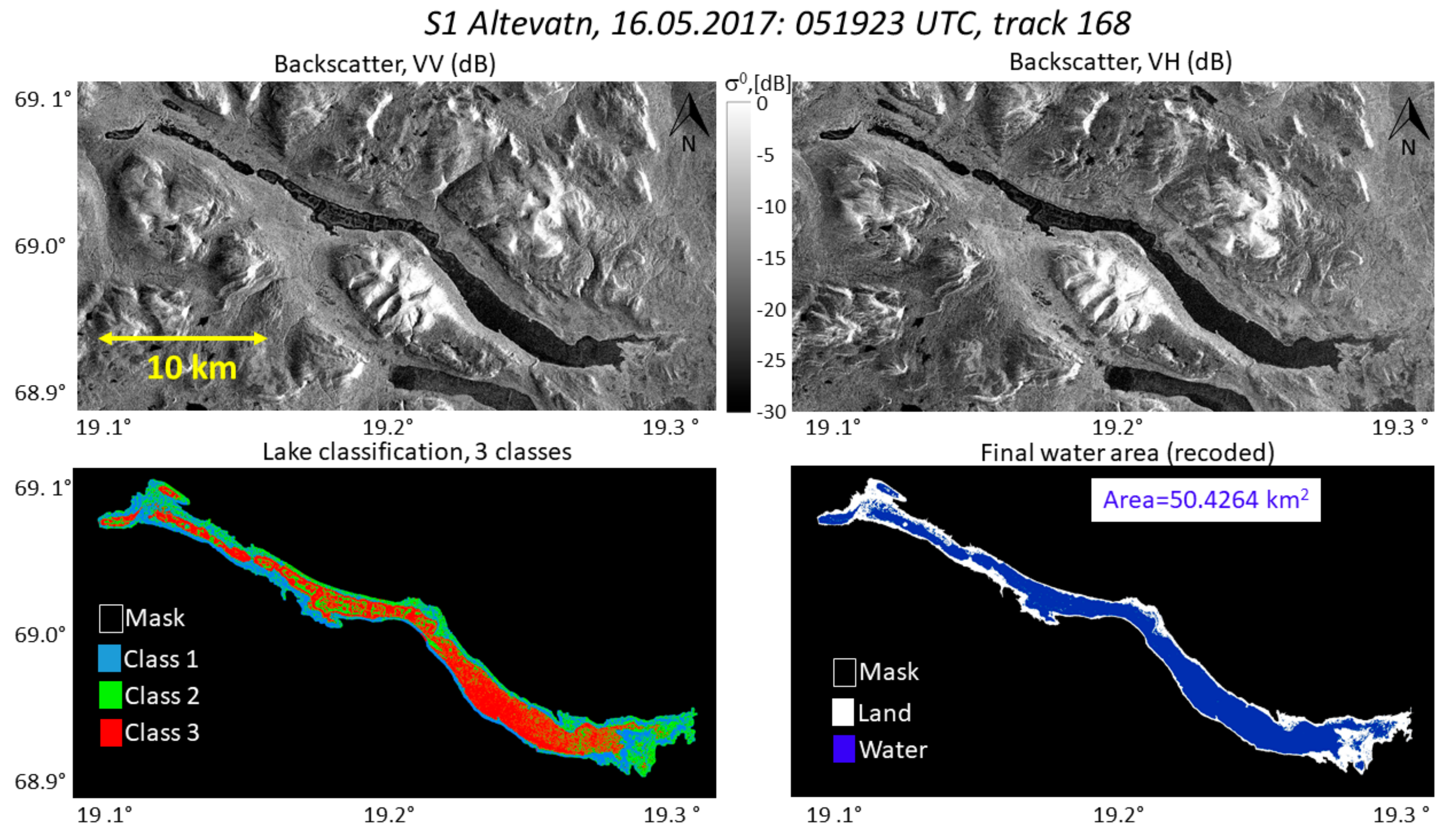
SAR backscatter from arctic lakes exhibits an annual variation as a result of seasonal snow and ice cover, which can build up from late autumn and last until the end of spring. During the summer and autumn when the lake is not frozen, the main challenge in estimating LWE is the variability in backscatter caused by surface roughness due to wind-induced waves at the water surface. This is a known problem particularly in co-polarized images which are most sensitive to surface roughness. In the freeze-up period, which typically takes place from November to January, the lake surface ice can be partial for a long period and presents a challenge when distinguishing water and land, since SAR backscatter from ice can exhibit very similar intensities to that from the surrounding land.
An additional complicating factor for monitoring Altevatn with SAR during the winter season is when the lake becomes entirely frozen with additional snow cover, which can result in greater radar backscatter than from open water, but lower backscatter than from bare ice, with the snow condition and depth affecting the strength of the backscatter. During the spring snowmelt or wet snow events during the winter, it becomes challenging to distinguish the lake edge since SAR backscatter from wet snow on land and lake can both be very low, thus giving poor contrast between the surface types. There is therefore a much greater degree of variability in backscatter during the winter and early spring, which results from varying ice and snow cover as well as snow condition, which is also controlled by temperature and precipitation. However, few studies have attempted to retrieve estimates of LWE during this challenging season and interpretation of SAR images will thus require a greater degree of care in order to extract the desired information. We intend to include where possible as many estimates of LWE from the winter season as we can, based on manual selection of the K-means classified images.
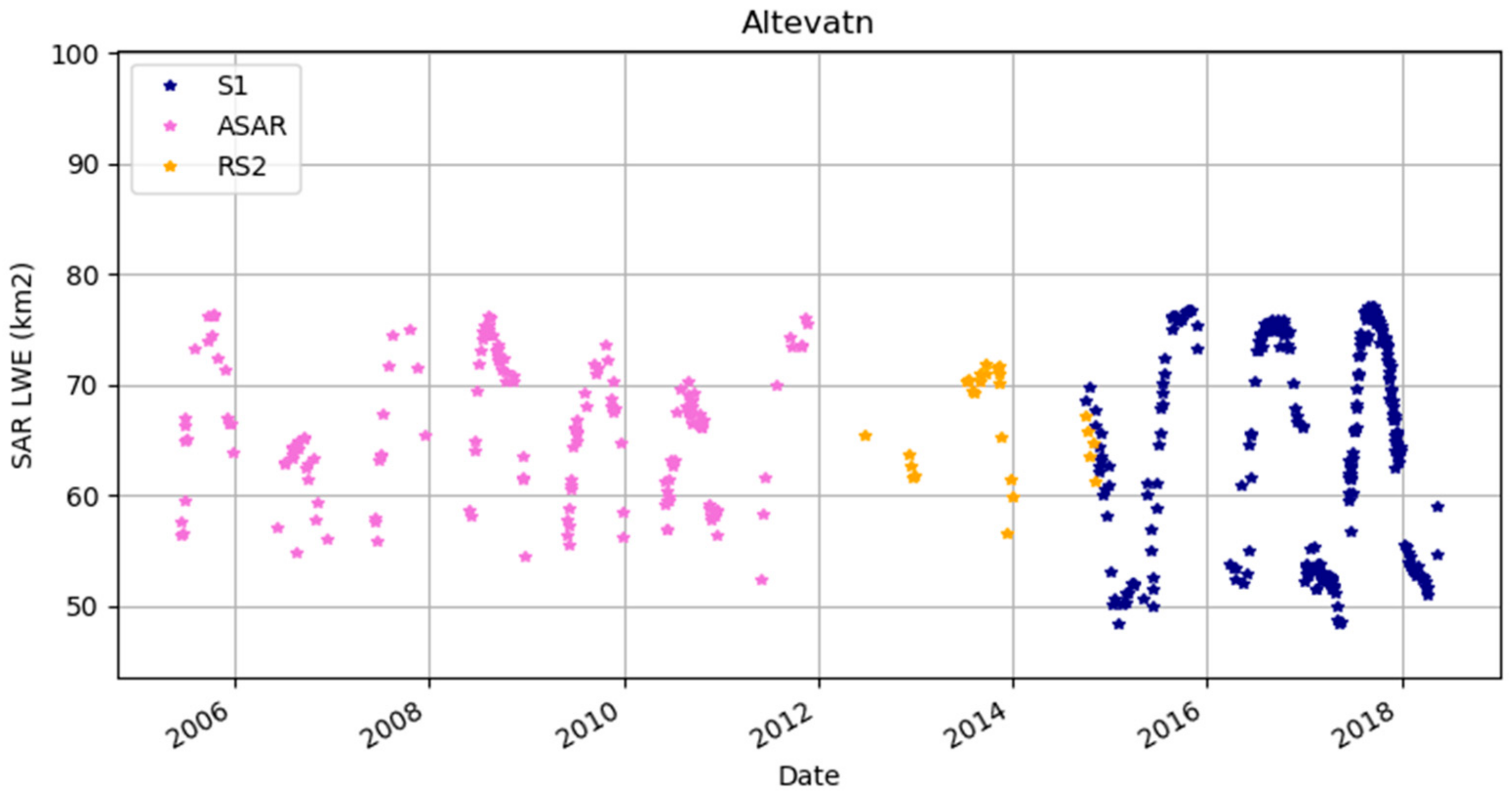
The primary objective of this study is to use C-band SAR images to estimate LWE for the Altevatn reservoir using three different SAR sensors, which together cover a period of almost 15 years. By employing as large a dataset as possible, in terms of number of images and period of time covered, we can check for consistency of the method over many seasons of data and across a range of sensor resolutions. We aim to develop a processing chain that not only will allow us to estimate and monitor the LWE of a single arctic lake but will be generic enough that it could be applied to any lake that is imaged by SAR satellites. We endeavor to achieve this by applying unsupervised clustering methods in order to firstly segment the SAR backscatter images and detect water occurrence in the SAR images.
The secondary objective is to use the LWE estimates to derive the lake hypsometry. That is to say, the relation between LWL and LWE through the use of in-situ water gauge measurements, and to apply this relationship to the measurement dataset to obtain not only a final time series of LWL but at the same time estimate the error in the LWE and LWL estimates. It is envisaged that this study will demonstrate an efficient and relatively simple method for monitoring variations in LWE (and therefore LWL) in near real-time. A similar study has earlier been carried out for monitoring water reservoir volume but in this case using optical Landsat imagery in combination with altimetry [
22]. The capability to monitor water levels using only remote sensing data could be potentially valuable in situations where in-situ data may not be immediately available or in cases where shallow lakes undergo frequent and rapid changes in lake volume in response to changes in weather pattern, extreme droughts or human interaction (e.g., agriculture/irrigation). In the case of hydropower dams like Altevatn, the method may also have commercial applications since timely information on LWE/LWL can be interesting for power brokers to assess the future market.
4. Discussion
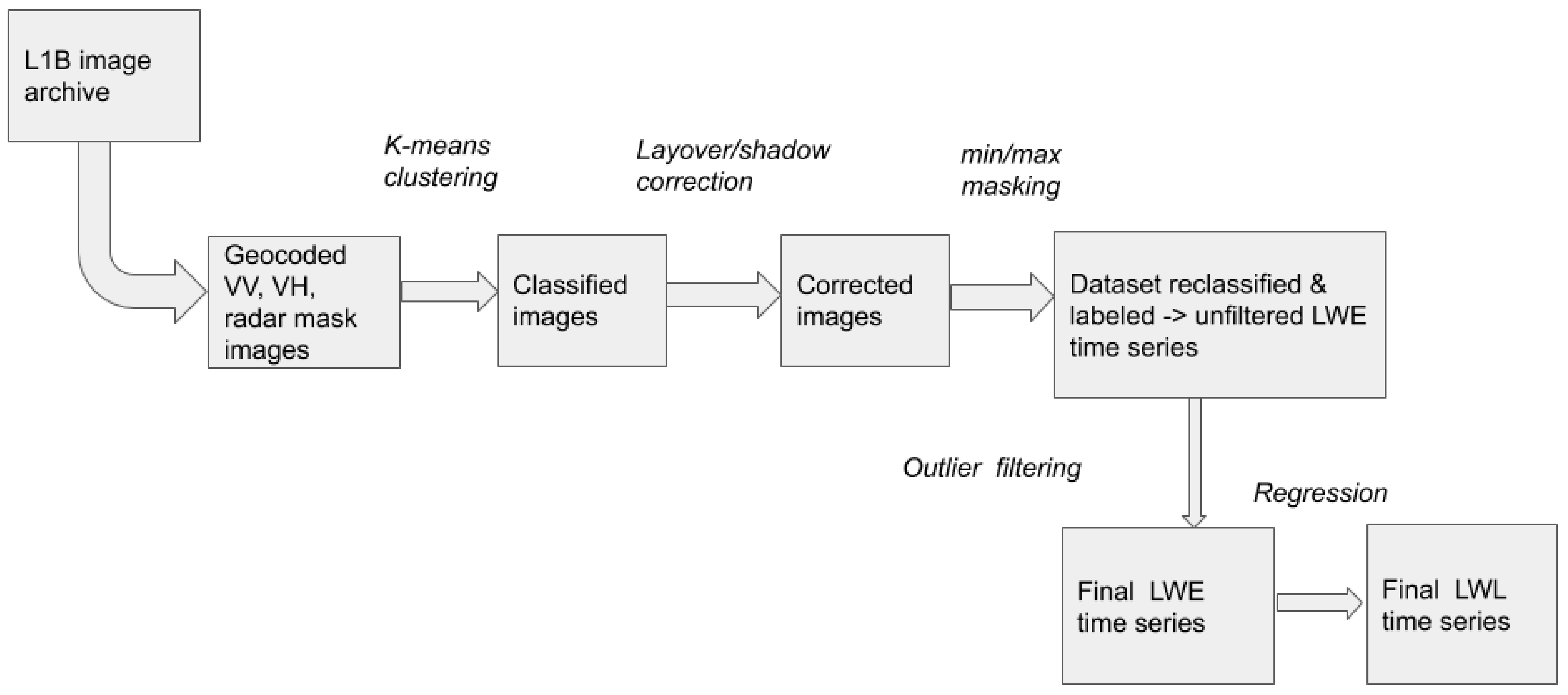
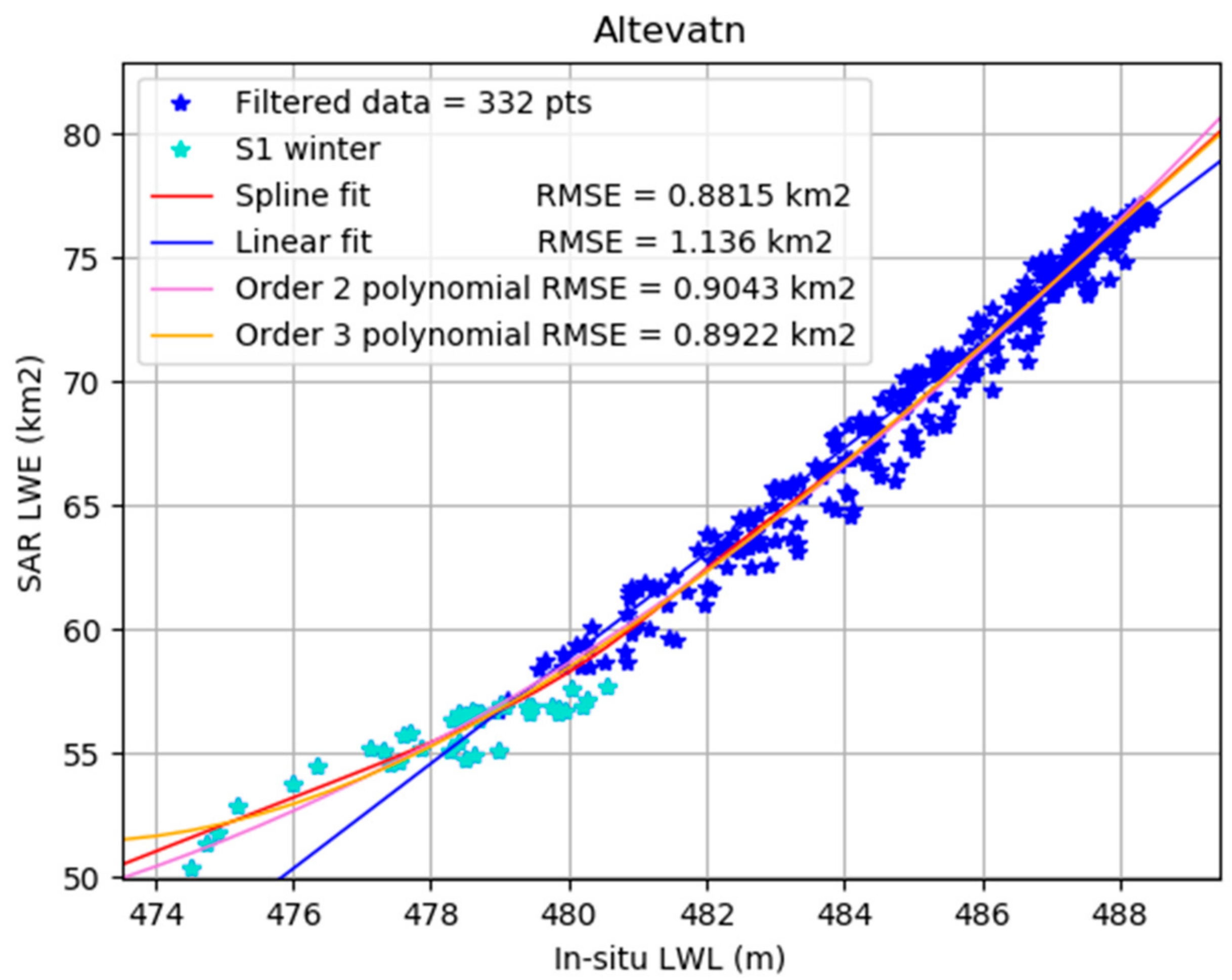
In this work we developed and demonstrated the use of a simple processing chain for estimating lake water extent using SAR images acquired by the Envisat ASAR, RADARSAT-2, and Sentinel-1 missions for the Altevatn reservoir in Northern Norway. Our method for estimating LWE is anchored in the use of unsupervised classification to detect surface water cover in the SAR images. Additionally, we have shown that by combining SAR estimates with in-situ measurements of LWL, the hypsometric curve for a lake can be obtained by fitting a third-order polynomial to describe the relationship between SAR LWE and LWL. In the present study we endeavored to show that estimates of LWE can be made during the winter months when challenges related to snow and ice cover may be present. On the other hand, the main challenge in correctly detecting lake water cover during the summer months is due to changes in surface roughness, usually resulting from the effect of wind over open water. We have however, included a correction in our processing chain to account for misclassifications within the center region of the lake that may arise due to the increased backscatter from waves, by applying a minimum area mask on each image.
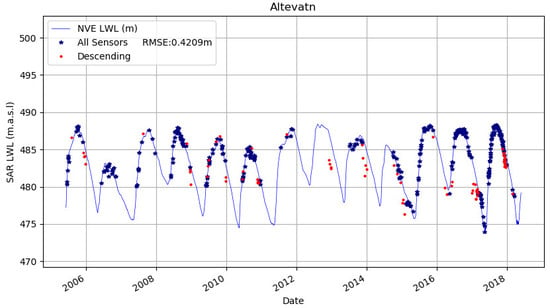
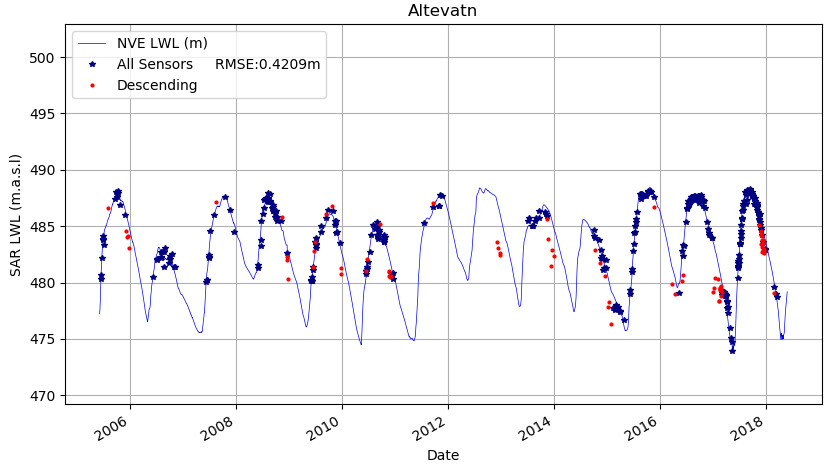
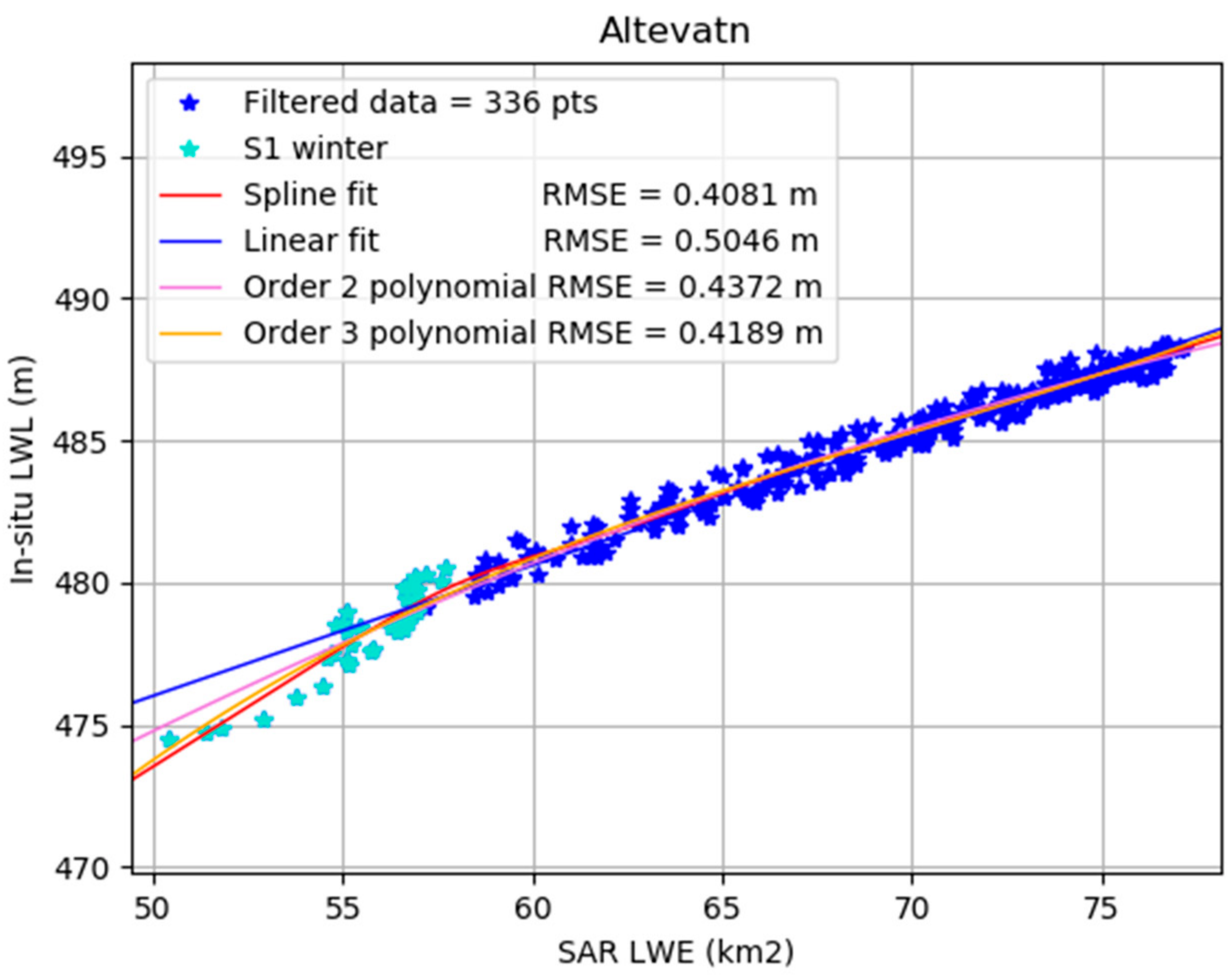
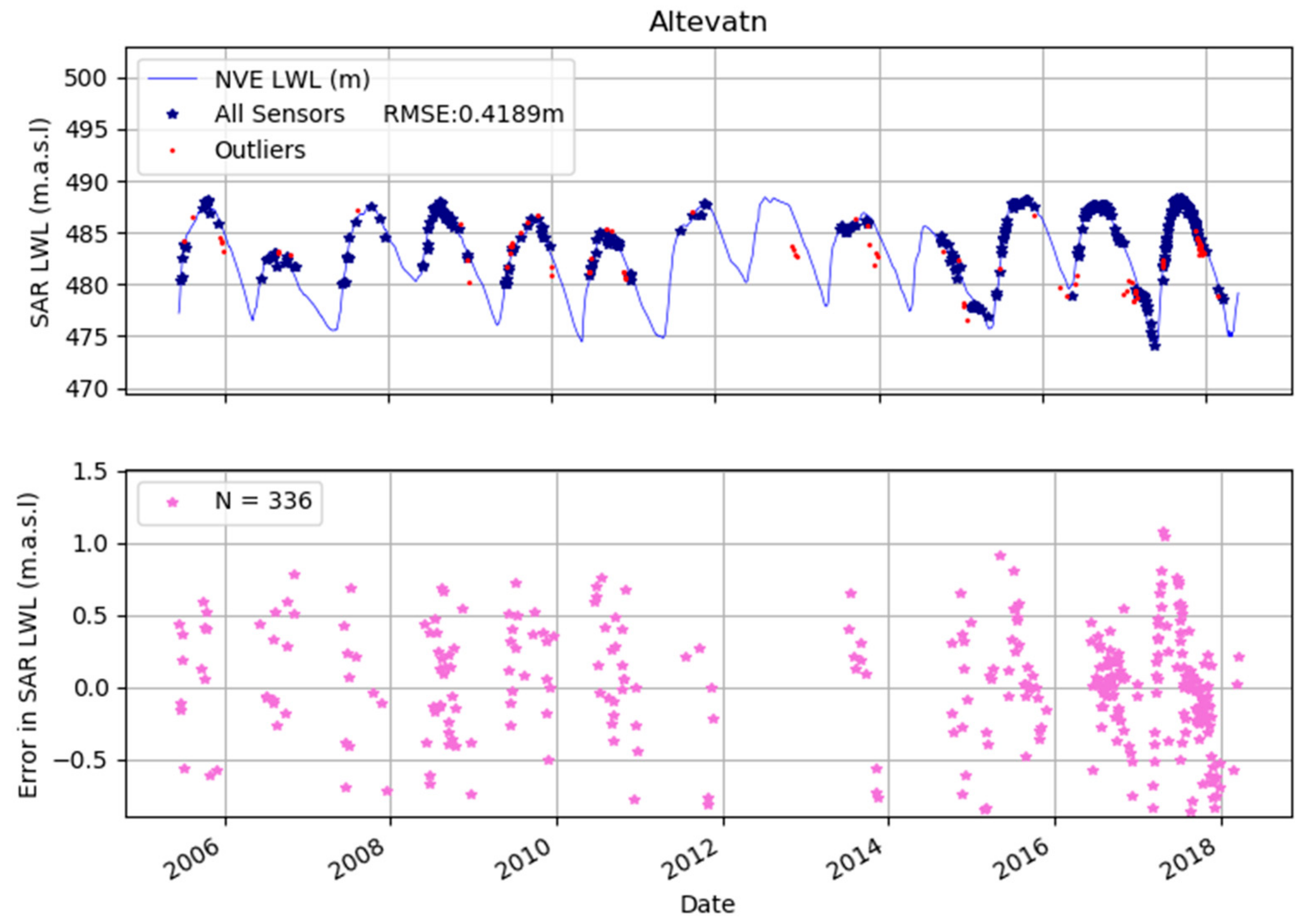
We have processed approximately 14 years of SAR data from sensors with different spatial resolutions and shown that even when using images with the lowest resolution of 75 m (Envisat ASAR) it is nevertheless possible to obtain a time series of LWE and derived LWL that is in qualitatively good agreement with the in-situ measurements. Through filtering and reducing the datasets we have been able to obtain fitted functions that allow LWL estimates to be made with the lowest RMS error obtained of 0.403 m, which is 2.5% of the maximum water level variation of the lake during the period studied. We found that only minor improvements in the RMSE were obtained from fitting a natural spline function compared with second- and third-order polynomials. Using the present threshold for filtering the dataset resulted in only 73 estimates of LWL that met the GCOS accuracy requirement of 10 cm for medium-sized lakes, which was roughly 21% of the filtered dataset. These estimates were associated with the months ranging from March through to December, indicating that there was no preference for better accuracy during the snow-free months. Furthermore, it is both interesting and important to note that estimates made with the lowest resolution sensor (ASAR) do not exhibit noticeably greater errors in the derived LWL estimates compared with the errors associated with the RS2 and Sentinel-1 estimates which both have much higher spatial resolution.
We obtained the lake hypsometry by fitting linear and nonlinear functions to the LWE–LWL datasets, with improvements in the RMSE of LWE and LWL when a natural spline or higher order polynomials were applied. We observed a mostly linear relationship for data samples associated with the summer (snow and ice free) months whereas the nonlinearities in the relationship were introduced as a result of including estimates made during the winter/spring months. This is likely due to the fact that the in-situ LWL is inferred from pressure gauge measurements and thus does not take into account the density differences of ice, snow, and water but instead indicates the water level equivalent for a given pressure. Since snow and ice are less dense than water, then the total ice/water covered area for a given equivalent water content will be greater than if the area had been derived from only water cover. This explains the observed relationships depicted by the scatter plots of
Figure 5 and
Figure 8.
The smallest LWE and LWL are typically associated with the end of the winter months and during the transition period when wet snow or ice present on land can present a challenge since this appears as low backscatter in the SAR images and gives little contrast between land and water. There may therefore be gaps in the coverage of the lowest LWL and LWE estimates due to poorer conditions for making reliable classifications. In such cases the problem could be addressed by taking into account the temporal history of the land/water classifications and allowing the minimum and maximum area masks to be dynamic, thereby limiting the uncertainty and variability of the LWE during transitional periods. Additionally, the use of wet snow maps for identifying areas of uncertainty would assist in developing a more automated detection of erroneous classifications. For example, if pixels associated with wet snow cover are found to intersect the area contained within the lake mask, then it could be expected that the classified area of water would be overestimated if only the backscatter amplitudes were used to classify the image. Adding wet snow maps as an input feature, as well as backscatter amplitudes to the K-means classifier could for example assist in identifying small differences in backscatter between wet snow on land and open water. Including additional information such as digital elevation map (DEM), slope, and land cover maps in training maximum likelihood classifiers for flood mapping applications has also been shown to reduce misclassifications due to the effects of noise and topography [
26].
Even though the current methodology is not yet fully automated, we see a potential to develop the procedure such that the current processing chain could be used in an operative, real-time setting. For this to be possible, the final lake classifications would have to be automatically checked for poor quality or by some other measure to indicate the quality of the original image being used in the classification. For example, by identifying VV images that are affected by wind and therefore higher backscatter across the surface, selecting only the VH channel to be used for classification could be implemented, possibly resulting in fewer poor classifications that are discarded from the final LWE time series. The LWE estimate derived from the final classified image could also be quality controlled by comparing it against some moving average of the earlier data points to determine whether or not it falls into the expected level of variation based on previous values. Automatic quality checks such as those suggested here would be required in order to bring the current procedure up to the standard demanded of a real time processing system.
One of the objectives for this study was to develop a processing chain that could be generic enough to be applied to any other lake; in the current processing chain we have studied a relatively small lake where incidence angle is unlikely to cause significant variation in backscatter across the lake. However, for very large lakes, it would be necessary to make corrections for local incidence angle variations in the SAR image since this affects backscatter strength [
27] at near and far ranges. The effect of incidence angle on backscatter is also dependent on the structural and dielectric properties of the surface [
28], which can be different, for example, in water bodies that are highly turbid or vegetated. This would have to be accounted for if our method was to be applied to such cases. Indeed, some of the common challenges resulting in misclassification, such as wind-induced increase in backscatter at the lake surface, may be addressed by using the incidence-angle dependence of different surfaces as O’ Grady et al. [
29] have demonstrated. On the other hand, another approach to dealing with backscatter variations due to incidence angle variations may be to divide up the image into segments or bands of roughly constant incident angles, as previous authors have investigated [
30].
A final topic that may have to be addressed if the method were to be transferrable to any other lake globally is the concept of the minimum area mask. We demonstrated in this study how we can obtain and apply such a product in order to correct for misclassifications and thereby retain a greater number of images in the time series. In the case of Altevatn this was made possible by the fact that the lake water volume is regulated and reaches a minimum at a certain time of year. This information may not be available for the majority part of unregulated lakes, which would therefore present a challenge in knowing which images to use to put together such a mask. Additionally, there are many shallow lakes in regions of the world where the lake dries up completely and the concept of a minimum water area would thus be irrelevant. It may therefore be necessary to adjust the current method in such a way that a minimum area mask becomes only an optional component of the processing rather than a mandatory one. For example, instead of segmenting the image into only three classes it could be worth investigating the use of over-segmentation and using more classes to separate areas of water with different backscatter characteristics. These could for example be combined as part of the post-processing to represent the final water covered area. At present our method is not good enough to obtain LWL at the level of precision demanded by GCOS while retaining satisfactory temporal coverage. In order to achieve the GCOS-requirement for the LWL (10 cm accuracy) we would need to improve the single pass classification accuracy close to 100%. Considering the challenges due to variable conditions including ice and wind this is unlikely with current SAR sensors. There is, however, a potential in the multi-temporal filtering of individual pixel classifications that could improve the accuracy significantly. A similar approach was used for snow monitoring [
31] and opens the possibility for fusing multiple sensors such as S1 and S2. This task will be studied in future work.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}