1. Introduction
OSIRIS-REx (Origins, Spectral Interpretation, Resource Identification, and Security–Regolith Explorer) is a NASA mission designed to characterize the geology, texture, morphology, geochemistry, and spectral properties of the near-Earth asteroid (101955) Bennu [
1]. Bennu is a carbonaceous asteroid thought to contain remnants of the building blocks of the solar system. Bennu has a mean radius of 246 m and orbits the sun with a semi-major axis of 1.13 astronomical unit (AU), which is situated between Earth (1.0 AU) and Mars (1.52 AU). The probe is designed to map the asteroid surface at a distance between 5 km and 0.7 km above the surface. Once the remote sensing of the asteroid is complete, the probe will return a minimum 60-g sample of pristine carbonaceous asteroid regolith for later lab analysis on Earth. The probe was launched on 8 September 2016 and reached Bennu on 3 December 2018 [
2]. The probe will depart Bennu in 2021 and return to Earth to land at the Utah Test and Training Range on 24 September 2023. A more detailed overview of the mission is contained in Lauretta et al. 2017 [
3].
The Touch and Go Camera System (TAGCAMS) was included in the spacecraft suite of instruments to support optical navigation during asteroid proximity operations, provide images for on-board natural feature tracking during sample acquisition, and document the asteroid sample stow operations [
4]. TAGCAMS contains 3 cameras: NavCam 1, NavCam 2, and StowCam. NavCam 1 is the primary optical navigation camera during most mission phases, acquiring images of star fields and the target asteroid to determine spacecraft ephemerides. NavCam 2 is identical to NavCam 1, except that its boresight is optimized for Natural Feature Tracking (NFT) imaging. It serves as a back-up to NavCam 1 and is the primary natural feature tracking camera. StowCam is identical to NavCam 1 and NavCam 2 except that it is pointed at the Sample Return Capsule (SRC) and includes an integrated Bayer color filter on its detector and its lens is focused to provide optimal imaging of the interior of the OSIRIS-REx sample return capsule. Since there is no auto exposure capability on the cameras, the camera calibration is critical for setting exposure times when observing Bennu or other celestial bodies that are in the camera field of view. Accurately calibrated NavCam images also allow for more exact measurements of Bennu’s albedo. After arrival at Bennu, NavCam 1 imaged a series of point-source objects off the limb of the asteroid [
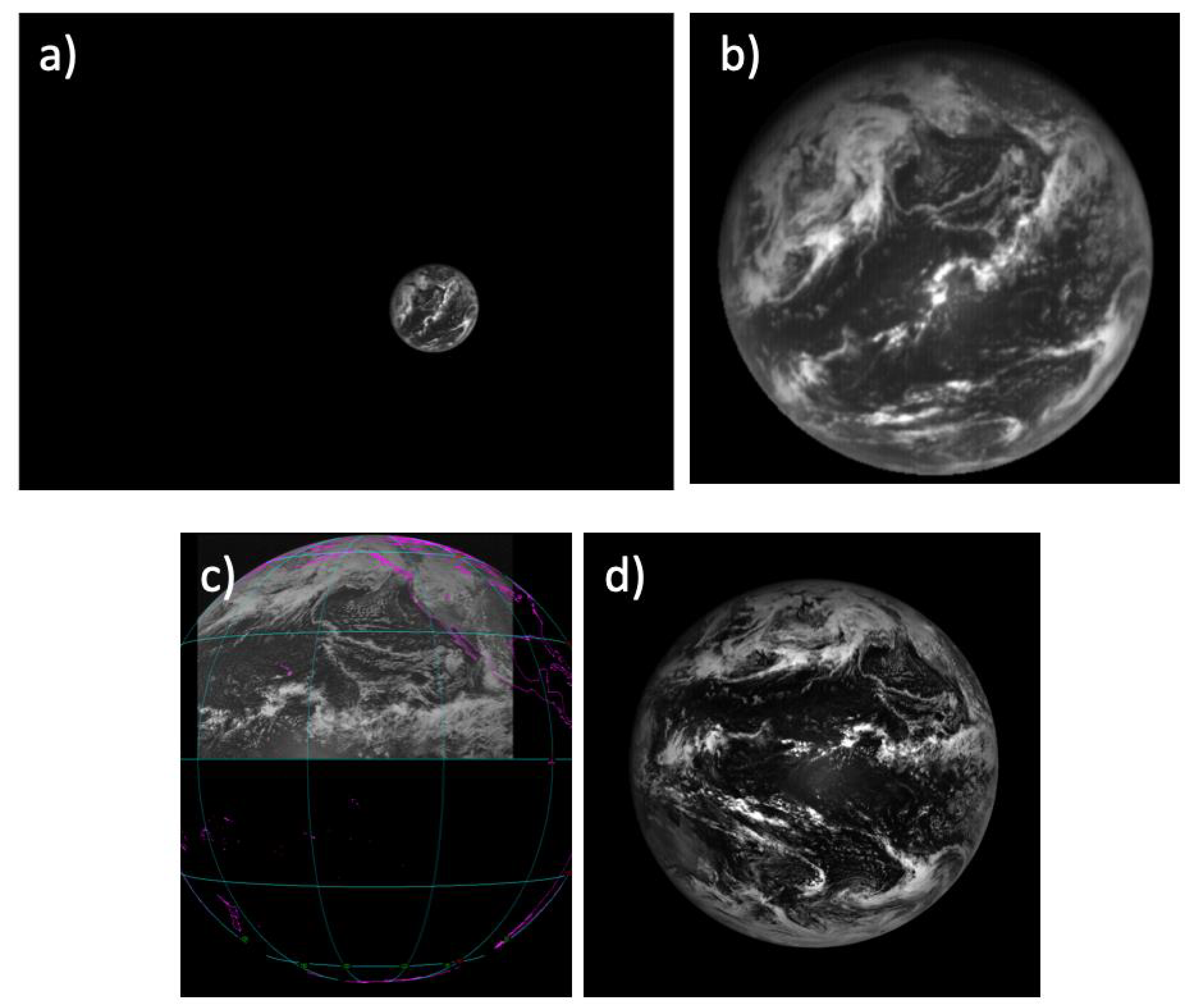
5]. Analysis of these calibrated images suggest that the objects are particles that are accelerated and ejected from the surface. To verify the camera pre-launch radiometric calibration, the spacecraft operations captured 23 NavCam 1 and three NavCam 2 images of Earth during an Earth gravity assist (EGA) flyby maneuver on 22 September 2017. These images contain the nearly-fully illuminated Earth disk centered over the East Pacific Ocean (
Figure 1).
The constellation of well-calibrated Earth-viewing satellite imagers provide a calibration reference to radiometrically scale the NavCam response. The most direct inter-satellite calibration approach compares simultaneous nadir overpass (SNO) radiance pairs from two sensors [
6,
7]. It has now become routine to inter-calibrate operational sensor visible channels with well-calibrated sensors, such as Moderate Resolution Imaging Spectroradiometer (MODIS) and Visible Infrared Imaging Radiometer Suite (VIIRS). For example, the Advanced Very-High-Resolution Radiometer (AVHRR) sensor series [
8,
9,
10,
11,
12] and the geostationary (GEO) imager [
13,
14,
15] constellation were inter-calibrated with MODIS. Under ideal circumstances, the well-calibrated MODIS or VIIRS sensors could possibly be used to directly inter-calibrate the NavCam images. However, all of the NavCam images were sampled during a period of 1.5 h period, during which only one MODIS or VIIRS swath was available for inter-calibration.
Given the circumstances, the best NavCam inter-calibration opportunity would be with a well-calibrated GEO imager. GEO imagers are located at the equatorial latitude in an Earth-relative stationary orbit, and continuously observe the same spatial extent of Earth below. This setup allows the GEO imager to capture multiple images during the OSIRIS-REx EGA maneuver. This study calibrates the sequence of NavCam images by utilizing coincident ray-matched NavCam and GEO imager radiance pairs. The NavCam images are mostly centered over the Geostationary Operational Environmental Satellite (GOES)-15 geostationary domain, which has a subsatellite longitude of 135° West at 0° latitude. The other neighboring Himwari-8 and GOES-16 GEO imagers, which are located at 140° East and 90° West, respectively, are too far away to provide any near-nadir views of the NavCam geographic domain. Another NavCam inter-calibration prospect used in this study is the Deep Space Climate Observatory Earth Polychromatic Camera (DSCOVR-EPIC) imager [
16]. The DSCOVR satellite obit is located at an Earth and sun gravitational minima or Lagrangian point (L1) and has the same sun-relative orbital period as Earth. This configuration enables the EPIC imager to continuously observe the sunlit side of Earth.
This study first radiometrically scales both the GOES-15 and DSCOVR-EPIC imager visible bands to the same Aqua-MODIS C6.1 band 1 (0.65µm) reference calibration using the NASA Clouds and the Earth’s Radiant Energy System (CERES) project GEO/MODIS all-sky tropical ocean ray-matching (ATO-RM) calibration approach [
13]. The CERES ATO-RM algorithm was validated using multiple well-characterized desert targets and a deep convective cloud ray-matching (DCC-RM) algorithm, and it was found that the multiple independent calibration approaches were consistent within 1% [
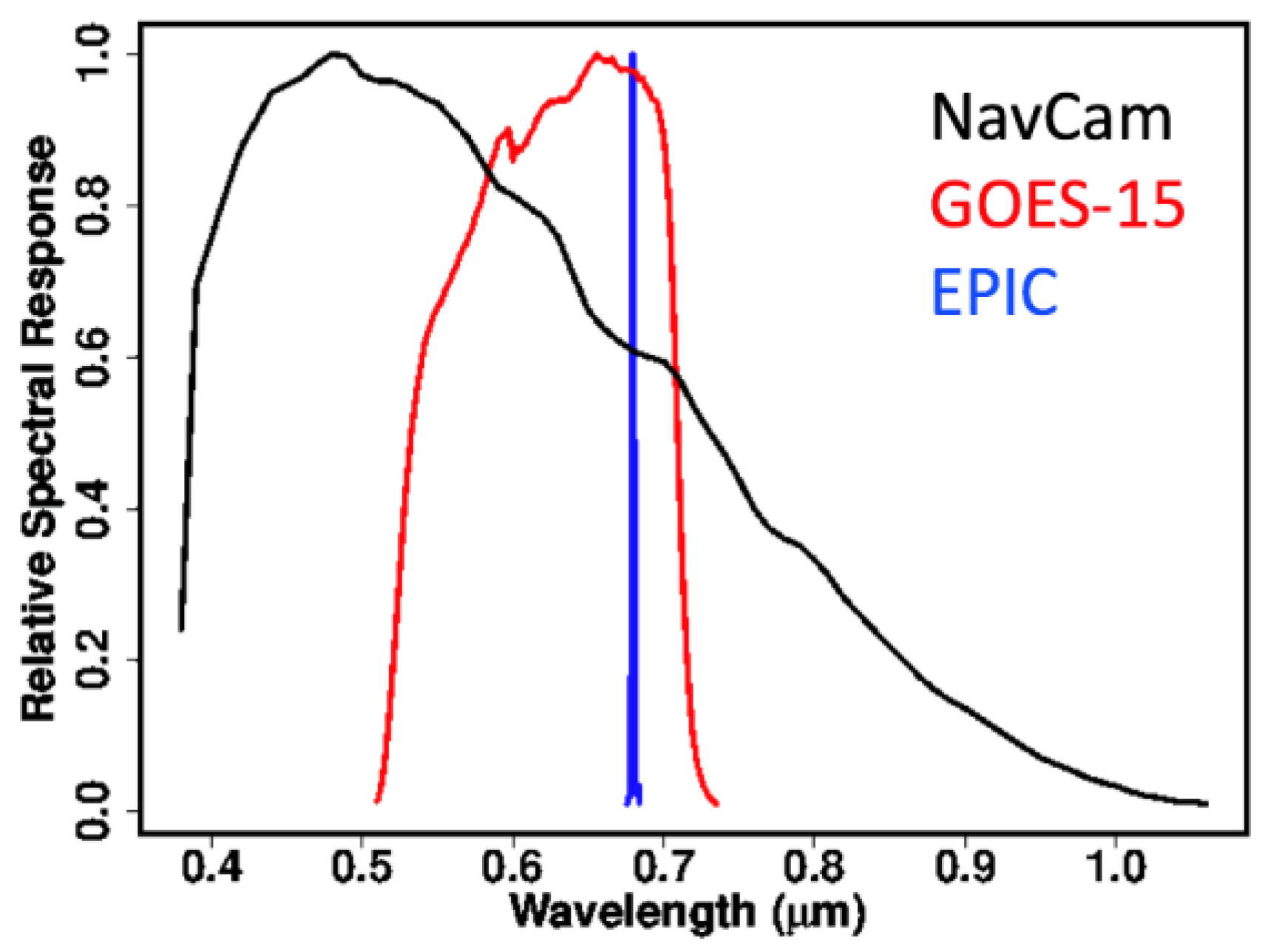
13]. This study modifies the ATO-RM algorithm to inter-calibrate the NavCam image response with both the GOES-15 and EPIC sensors. The greatest challenge is finding a balance between the degree of angular matching and sufficient radiance pair sampling across the dynamic range to perform a meaningful linear regression. Another challenge is the NavCam spectral band response, which is very broad compared with the GOES-15 and EPIC spectral response functions. Inadequate angle matching and spectral adjustments may bias the NavCam calibration results.
Section 2 of this paper describes the NavCam, GOES-15 and EPIC datasets. The mapping of the GOES-15 and EPIC pixel-level radiances into the NavCam field of view is discussed in
Section 3.
Section 4 outlines the modified NavCam ATO-RM approach that optimizes the angle matching and spectral adjustments. The ATO-RM calibration results for the two NavCam imagers are described in
Section 5.
Section 6 provides the best estimate of the NavCam 1 gain and uncertainty.
Section 7 compares the NavCam gain with the pre-launch gain. Conclusions are provided in
Section 8.
3. NavCam Image Navigation and Mapping Methodology
Prior to ray-matching, the GOES-15 or EPIC pixel level radiances have to be collocated with NavCam CMOS pixels. Instead of mapping each of the datasets to a pre-selected geographic projection it was decided to map higher-resolution data (GOES-15 and EPIC) directly into the lower-resolution domain of NavCam image coordinates. This allows the NavCam pixels to retain their original DN thereby reducing errors caused by resampling. Another reason for this decision is the fact that any potential spatial mismatch between the two datasets should be attributed to the unknown alignment of the NavCam images, which in turn is easier to correct for when working within the NavCam image coordinates.
At the time of this study the only verified navigation information about the NavCam imager was the (x,y,z)-coordinates of OSIRIS-REx platform location in space and the tilt angle between the camera’s vertical axis and Earth’s rotational axis. We can define the camera’s coordinate frame with
z-axis pointing from the satellite to Earth’s center,
y-axis aligned with the apparent Earth’s rotational axis (as viewed by the camera), and
x-axis complements the
yz-axes to form a right-handed coordinate system. The view vector (0,0,1) pointing from the satellite to Earth’s center can easily be transformed into the Earth-centered rotational (ECR) coordinate frame, which gives us the geolocation for a pixel in the center of the apparent Earth disk. Any other view vector corresponding to a pixel within the Earth disk can be described by two angles, yaw and pitch, defined as deviations from the (0,0,1) vector. These deviations can be calculated as the pixel’s distance from the Earth disk center multiplied by the pixel angular resolution. Thus, if all four parameters (the camera tilt angle, the pixel resolution, and the
x and
y image coordinates of Earth’s disk center) are known with high accuracy then they are sufficient to define the pixel’s view vector, transform it to the ECR system, and find its intersection with the Earth ellipsoid [
25]. This yields the geolocation (latitude and longitude) for any image pixel within the visible Earth disk. We can neglect the ortho-correction here because a typical surface elevation is much smaller than NavCam pixel’s field of view.
The angular resolution in the image center was reported to be 0.288 mrad/pixel, but due to the significant barrel distortion this number varies non-linearly across the image and therefore it was decided that this will be a free variable for which to solve. In addition to the unknown angular resolution, the exact location of the Earth disk center on the image (
Figure 1a) also has to be determined. Its approximate location is derived as follows. The pixel brightness in the input image is measured within a circular window of 100-pixel diameter, which is sliding over the image at 60-pixel steps, and location of the highest brightness is used as the initial center point. From that point, 16 rays are cast outwards and the pixel brightness along each ray is measured until it drops to the background level corresponding to the black space. For those NavCam images where the Earth disk was not fully illuminated, the range of angles where the 16 rays were cast is reduced so that all of them cross the lit edge of the disk. Thus, the determined 16 locations describe the apparent location of Earth’s ellipsoid in the image. Assuming that tilt angle is known at least approximately, it is possible to use the least square fitting to derive the
x,
y-location of the ellipse center and its semi-major axis. The latter can easily be converted into the local angular pixel resolution.
Once the geolocation for each NavCam pixel is resolved, it is then possible to remap the reference dataset (GOES-15 and EPIC), referred to as the “source” below, into the NavCam image coordinate space, referred to as the “destination”, by using the gradient search method [
26]. At first, the spatial derivatives of the source latitude and longitude are calculated. Then for each destination pixel, its latitude and longitude are searched in the source by means of the pre-calculated gradients. The obtained fractional coordinates within the source dataset are then used to accurately resample the nearby source pixels by using Gaussian weights with the characteristic kernel width σ = 4. This weighting is designed to implement the spatial convolution of source pixels prior to remapping and thereby to emulate the point spread function of the NavCam imager. The resampled source pixel is finally stored at the destination pixel location and is later used as a reference. During this remapping process, care is needed to limit the valid image area where the gradient search is employed, in both the source and the destination pixel space, as the visible and sun lit Earth coverage is different for the two datasets. This helps to save on searches for non-existent locations and significantly boost the overall performance.
Even if the pixel geolocation was possible to compute exactly, there would still remain some spatial mismatch between the remapped GOES-15 or EPIC data and the original NavCam pixels. This can be due to imperfect georeferencing of GOES-15 or EPIC, the parallax effect on elevated clouds, errors in the NavCam tilt angle, the pixel resolution, and the apparent location of Earth’s center, but mostly that mismatch is caused by advection displacement of clouds, which can be up to 100 km due to difference in the observation times. If the pixel level regression is applied to such spatially mismatched images then the resulting correlation will be too low to allow for a reliable calibration analysis.
All of these spatial differences can be corrected by means of the subpixel image matching technique used for AVHRR georeferencing [
27]. In the current study, instead of pre-selected ground control points, the image matching was applied to all image subsets (or chips) of 32 × 32 pixels produced from both input images. For each matching pair of chips, spatial correlation is calculated repeatedly for a range of their possible relative displacements. The highest correlation yields an optimal displacement of one image relative to another at that particular chip location. As a result, this routine produces a 2D vector field of displacements, which is then spatially interpolated to obtain the local displacement for each pixel of the input image [
28]. On the last step, the remapping process described above is repeated with each pixel’s fractional position now corrected by the amount of the local displacement derived from the image matching.
The mean of all those displacements serves as an RMS measure of the error in the four input parameters listed above: the NavCam tilt angle, the pixel angular resolution, and the two coordinates of Earth’s disk center in the image. The computed total mean displacement ranges from about 4–5 pixels for image pairs with the observation time difference of 2–3 min and up to 14–16 pixels when the time difference reaches 15-min (e.g., EPIC observation). It should be possible to decrease the total mean displacement and thereby reduce the overall image distortion caused by image matching and subsequent non-linear correction if we find the correct set of the four parameters that would produce the best image matching and, thus, the best georeferencing. The method that minimizes our RMS measure can be implemented as a standard variation routine where each of the four parameters is varied in turn until the solution iteratively converges to the lowest desired amount of the mean displacement, typically on the order of 0.3–0.5 pixels. With such a low subpixel level of the residual spatial errors, it should be possible to facilitate the pixel level ray-matching with a high degree of confidence.
5. Results
5.1. NavCam Calibration Table
Table 1 contains the NavCam ATO-RM statistics. The first column lists times for the twelve out of twenty-three NavCam 1 images and all three NavCam 2 images that were calibrated. Not all NavCam 1 images could be matched with GEO images in both space and time. The second column contains the EPIC and GOES-15 image times that were matched with the NavCam images. The two NavCam 1 and EPIC matched images were 15 (row 1) and 25 (row 12) minutes apart. Ten NavCam 1 images (rows 2–11) were matched with three GOES-15 images and all matches were within 7 min. The first NavCam 2 image is listed twice (rows 13–14), because it was inter-calibrated with both EPIC and GOES-15 images. The last two NavCam 2 images (rows 15–16) were taken at different exposure times and were matched with the same GOES-15 NH image. The 3rd and 4th columns list the GAM thresholds. The next 3 columns list the force fit gains for ATO-RM, for ATO-RM for radiances >200, and for
ATO-RM without SBAF. The next four columns contain the orthogonal regression standard error and x offset for ATO-RM and for
ATO-RM without SBAF.
To assess the impact of angle matching tolerance on the NavCam 1 gains, the three GOES-15 images were matched with a sequence of NavCam 1 images, which were coincident within seven (rows 2–5), two (rows 6–8), and three (rows 9–11) minutes. The GAM angular thresholds were consistent for each sequence of NavCam 1 images. The top half angular thresholds were nearly the same; however, the 1st quartile angular thresholds were the most restrictive for the 22:05 GMT NH image (rows 9–11), less restrictive for the 21:13 GMT FD image (rows 2–5), and the least restrictive for the 21:35 GMT NH image (rows 6–8). The NavCam 1 gain standard deviations for each GOES-15 NH image are 0.2% (22:05 GMT, most restrictive), 0.5% (21:13 GMT, less restrictive), and 1.3% (21:35 GMT, least restrictive). As expected, increasing the angular threshold tolerance increases the uncertainty in the gain. The fact that the NavCam gains are consistent across a sequence of images and that the Earth was centered across various locations in the NavCam field of view suggests that the NavCam 1 CMOS flatfielding is very good.
To determine whether the angular thresholds were effective, the ATO-RM gains are compared to the top half radiance gains (>200), which have a more Lambertian reflection than ATO, for the ten GOES-15/NavCam 1 images (rows 2–11). The ATO-RM minus the ATO-RM top half (>200) gain was –0.4%, thus confirming adequate angle matching across the dynamic range. To evaluate the SBAF gain impact, the ATO-RM minus the ATO-RM no SBAF (noSB) gain was +1.5%. The NavCam 1 10-image average ATO-RM and ATO-RM no SBAF offsets were 164 and 278, respectively. The ATO-RM offset nearly equals the space DN of 170, which suggests that the application of SBAF when performing ATO-RM mitigated the spectral band differences. The NavCam 1 10-image average standard errors for ATO-RM and ATO-RM no SBAF are 12.0% and 12.7%, respectively. The consistency between the ATO and >200 gain, a regression offset that nearly equals the space DN, and the reduction of the standard error all indicate that both the SBAF and angular matching criteria were sufficient.
5.2. NavCam 2 Calibration Gains
The last two NavCam 2 images provide an opportunity to assess the impact of the NavCam exposure time settings on the ATO-RM algorithm.
Figure 7a,b display the last two NavCam 2 images and can be compared to the first NavCam 2 image shown in
Figure 1b. The 3 NavCam 2 images were inter-calibrated with the same GOES-15 NH image. The pixel pair density plots reveal similar features as
Figure 5b but are compressed (
Figure 7c) or expanded (
Figure 7d) across the NavCam DN axis. A total of 75% of the
Figure 7b NavCam 2 image pixels are saturated.
The NavCam 2 pixel DN and GOES-15 radiance ATO-RM pairs are displayed in
Figure 6b and
Figure 7e,f.
Figure 6b and
Figure 7e have the GAM and σ
2D thresholds applied, whereas
Figure 7f simply splits the radiance range at 75 Wm
−2sr
−1µm
−1 and applies a σ
2D < 0.3.
Figure 7e is very consistent with
Figure 6b where the standard error and offset are nearly identical. The exposure time ratio for these two NavCam 2 images is 2 = 0.1528 × 10
−3/0.0764 × 10
−3 s. The
Figure 7e and
Figure 6b NavCam 2 force fit gain ratio is 1.9996, which is nearly identical to the exposure time ratio. The NavCam 2 saturated image lacks the bright cloud pairs and must exclusively rely on the
1st and 2nd quartile radiances, which require stricter angular matching but only broad angular matching is geometrically possible with this NavCam 2 and GOES-15 image configuration. The
1st quartile radiances are not sufficiently matched in angle and therefore do not intersect the force fit line, and the regression standard error was not significantly reduced with the ATO-RM thresholds. The force fit gain is a much better estimate than the slope gain, since it only solves for the gain rather than the gain and offset simultaneously, which may introduce bias in the gain [
38]. For this case, the NavCam exposure time ratio is 0.473 = 0.3228 × 10
−3/0.1528 × 10
−3 and the ATO-RM force fit gain ratio is 0.491, which is within 3.9%. The NavCam ATO-RM force fit gains are able to provide consistent gains within 3.9% across exposure times of a factor of ± 2.
6. NavCam 1 ATO-RM Gain Discussion
It is difficult to estimate the true NavCam 1 gain given a very limited number of inter-satellite matches. The twelve NavCam 1 images were matched with two EPIC and three GOES-15 images. Each of the GOES-15 images was matched with multiple NavCam 1 images. The average NavCam 1 gain based on the ten GOES-15 and two EPIC matches is 9.831 × 10−2 Wm−2sr−1µm−1DN−1 ± 2.2%. Some of the NavCam 1 gain differences may be due to the intrinsic GOES-15 and EPIC radiance value difference. If the EPIC gain were first radiometrically scaled with the GOES-15 gain based on the NavCam 2 22:38:27 image using a scaling factor of 9.642 × 10−2 (GOES-15)/9.388 × 10−2 (EPIC) = 1.0271, then the NavCam 1 mean gain is 9.874 × 10−2 Wm−2sr−1µm−1DN−1 ±1.8%. The GOES-15/MODIS ATO-RM radiances are considered more accurate than the EPIC/MODIS ATO-RM radiances, due to the large EPIC navigation error, narrow EPIC band 7 SRF, and greater matching time difference.
The ATO-RM calibration gain uncertainty is based on many factors. For this study, the NavCam barrel lens distortion, flat-fielding, and linear response were not considered. The ground-to-orbit Aqua-MODIS calibration reference uncertainty for band 1 is 1.65% [
39]. The MODIS calibration drift adds another 1% [
40]. The
Figure 1b GOES-15 calibration uncertainty is 1.1% (
Section 2.2). The SBAF standard error is 1.9% (
Section 4.1). The NavCam 1 12-image gain standard deviation is 1.8% (after scaling the EPIC radiance to GOES-15) and is considered the ATO-RM algorithm uncertainty. The spatial matching error is estimated by the linear regression slope uncertainty. The slope uncertainty is considered the upper limit of the matching error, given the spatial matching error increases the radiance pair noise along with angular mismatching. The slope uncertainty of
Figure 6a,b was 0.50% and 1.41%, respectively. The spatial mismatch error is estimated at 1.41%. The resulting ATO-RM calibration gain uncertainty is 3.71% for the NavCam 1 calibration gain of 9.874 × 10
−2 Wm
−2sr
−1µm
−1DN
−1.
7. Comparison with Pre-Launch Calibration
Prior to launch, the radiance responsivities of the two NavCams were characterized at Malin Space Science Systems (MSSS) using an integrating sphere illuminated with a quartz-tungsten-halogen (QTH)–based broadband light source [
4]. Due to the broad SRF of the NavCam imager, the pre-launch calibration was derived in terms of in-band radiance by integrating the sensor response over the pass band of the NavCam SRF. In addition, the pre-launch calibration coefficients are normalized by the mean exposure time to facilitate the radiometric comparison of NavCam images acquired at different exposure times. The pre-launch radiometric gains for NavCam 1 and NavCam 2 were estimated to be 100,965 (DN/s)/(Wm
−2sr
−1) and 102,685 (DN/s)/(Wm
−2sr
−1), respectively.
The in-flight calibration results based on the ATO method are compared with the pre-launch values to identify any temporal drift in the radiometric responsivity of NavCams after launch. The ATO-based radiometric gains of NavCam 1 and NavCam 2 are derived in the units of spectral radiance and are found to be 9.874 × 10
−2 Wm
−2sr
−1µm
−1DN
−1 (
Section 6) and 9.642 × 10
−2 Wm
−2sr
−1µm
−1DN
−1 (Table row 14), respectively. These gains are multiplied by the equivalent width (343 nm) of the NavCam SRF to adjust to the units of in-band radiance [
41]. By further normalizing these gain values by the imaging exposure time (0.1528 × 10
−3 s), the ATO gains for NavCam 1 and NavCam 2 turn out to be 193,237 (DN/s)/(Wm
−2sr
−1) and 197,886 (DN/s)/(Wm
−2sr
−1), respectively. These numbers are significantly higher than the ground-based calibration.
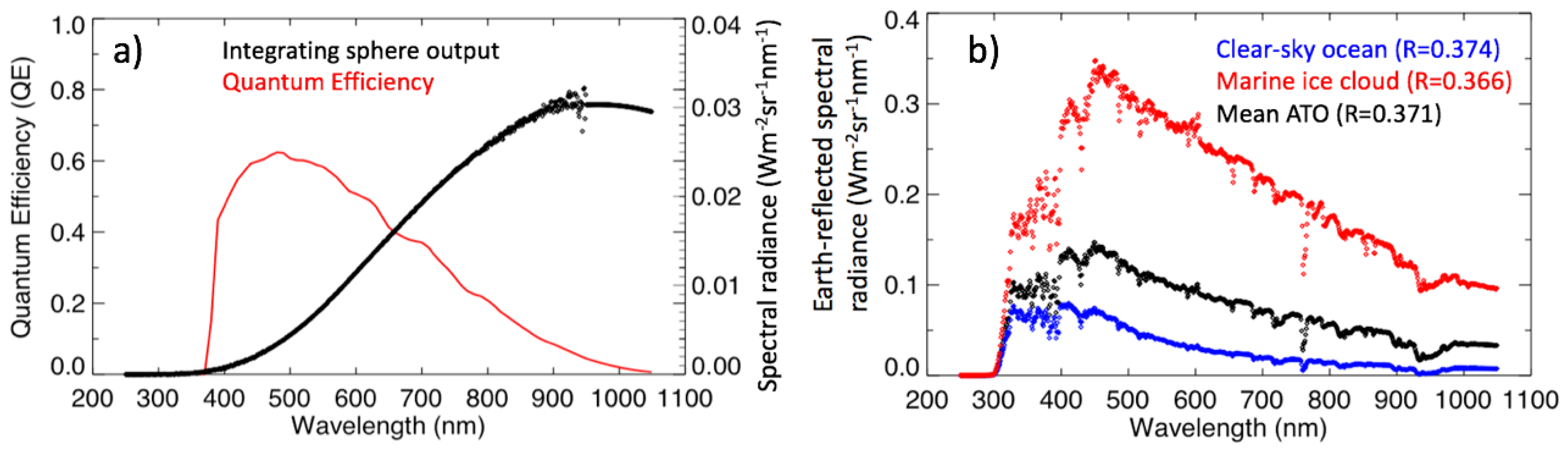
The integrated in-band response of an imaging sensor is dependent upon the illuminating spectra.
Figure 8a shows the reference spectral radiance coming out of the exit port of the integrating sphere that was used for the pre-launch calibration. The reference spectra maximize at near-infrared wavelengths where the quantum efficiency (QE), plotted in red, of the NavCam imaging sensor is very small. On the other hand, the ATO-RM method utilizes the Earth-reflected solar spectra that have a peak in the visible part of the spectrum, where the QE also maximizes. To facilitate a direct comparison between the ground-based and in-flight calibration results, the difference in the two reference spectra must be taken into account. A correction factor is derived using the relative ratio (R) of the in-band sensor response to the total over pass band input radiance for each reference spectrum, as defined by the following equations:
where L
Sphere and L
ATO are the spectral radiance spectra at the integrating sphere output and the Earth-reflected ATO spectra, respectively, and QE is the quantum efficiency of the sensor. The integration is performed over the spectral range of the filter pass band. The value of R
Sphere is computed to be 0.198. The Earth-reflected ATO spectra are a combination of the clear-sky ocean and bright cloud targets.
Figure 8b shows the top-of-atmosphere spectral radiance spectra of clear-sky ocean, marine ice cloud, and ATO scene conditions derived from SCIAMACHY footprints. It is interesting that the value of R is nearly the same (within 2%) for the clear-sky, marine ice cloud, and the combined ATO spectra. This is because the relative spectral distribution of the reflected solar energy is nearly the same for these scene types. So, the mean ATO spectrum is used for correction. The value of R
ATO is found to be 0.371. The NavCam 1 ATO gain after correcting for the difference in input spectra is, therefore, computed as:
The adjusted NavCam 1 and pre-launch gain differ by only 2.1%. Similarly, the NavCam 2 ATO calibration of 197,886 (DN/s)/(Wm−2sr−1) is adjusted and found to be 105,610 (DN/s)/(Wm−2sr−1), which is consistent with the pre-launch gain within 2.8%. As a final check on the ground calibration, the ratio of the pre-launch NavCam 1 and NavCam 2 gains (0.9833) was compared with the ATO-RM gain ratio (0.9765) and was found to be within 0.7%. The consistent pre-launch and on-orbit NavCam gains denote a stable performing sensor, while in space.
8. Conclusions
The Earth-viewed OSIRIS-REx NavCam images captured during an EGA maneuver provided an opportunity to validate the NavCam pre-launch ground-based calibration. GOES-15 and DSCOVR-EPIC imager radiances were found most suitable to inter-calibrate the NavCam images. First the GOES-15 and EPIC pixel-level radiances were mapped to the EPIC field of view. An optimized ATO-RM inter-calibration algorithm accounted for spectral band differences, navigation errors, radiance field changes due to the time matching difference, and angular geometry differences by incorporating SBAFs, spatial homogeneity tests, and radiance stratified angle matching thresholds.
Twelve NavCam 1 images were inter-calibrated with two EPIC and three GOES-15 images, which were first radiometrically scaled to the Aqua-MODIS reference calibration. The GOES-15 reference radiances were considered more accurate than the EPIC reference radiances, owing to the large EPIC navigation error, exceptionally narrow SRF, and greater matching time difference. After radiometrically scaling the EPIC radiances to GOES-15, the NavCam 1 mean gain is 9.874 × 10−2 Wm−2sr−1µm−1DN−1 ± 1.8%. After accounting for known uncertainties in the NavCam ATO-RM algorithm, the total gain uncertainty is estimated at 3.7%. The ATO-RM orthogonal regression offset of 164 is close to the true space DN of 170. When strict angular matching thresholds are possible between multiple NavCam 1 and two matched GOES-15 images, the standard deviation of the ATO-RM NavCam gains were within 0.2%–0.5%, suggesting that the NavCam 1 CMOS detector flatfielding is very good. The ATO-RM calibration was able to provide gains that are consistent within 3.9% across a factor of ±2 exposure times. The ATO-RM calibration method can be verified by using both GOES-15 and EPIC to independently transfer the Aqua-MODIS reference calibration to NavCam 2 and the resulting gains were consistent within 2.6%.
The ATO-RM NavCam 1 and NavCam 2 gains were compared with the pre-launch gains. The pre-launch gains were based on using an integrating sphere and a QTH lamp. After accounting for the difference of the solar and lamp spectra, the pre-launch and ATO-RM NavCam 1 and NavCam 2 gains were within 2.1%–2.8%. The estimated ATO-RM gain uncertainty was 3.7%, indicates that the pre-launch and the ATO-RM gain difference is less than what can be significantly resolved using the ATO-RM calibration method. Finally, the NavCam 1 and NavCam 2 calibration gain ratios based on ATO-RM and pre-launch were within 0.7% of each other, indicating consistent NavCam 1 and 2 optical performance while in space. The ATO-RM calibration results verify that the on-orbit NavCam calibration gain is very similar to the pre-launch gain, indicating that no significant NavCam performance changes have occurred during space flight.
This work provides an independent, in-flight absolute radiometric calibration of NavCam 1 and 2. This aided the NavCam exposure time planning for Bennu observations. The small 3% radiometric uncertainty we found also benefits asteroid analyses that rely on absolute radiometric information in NavCam imagery. For example, NavCam images of Bennu provide an independent measurement of the body’s albedo, in concert with the other imagers onboard the OSIRIS-REx spacecraft. It also informs how accurately we can estimate from NavCam images the sizes of unresolved particles ejected from Bennu’s surface. Size measurements of these objects has become important to the OSIRIS-REx mission since their first detection in January 2019 [
5].
This study has demonstrated that images of the sunlit Earth disk taken during an EGA maneuver by a solar-system probe, such as OSIRIS-REx, can be inter-calibrated using Earth-orbiting imagers. Due to the limited number of NavCam images and coarse pixel resolution, geostationary imagers are the most suited sensors for this task. The GEO imagers operationally scan at least every half hour and the most current sensors scan a full disk every 15 min. The current constellation of GEO satellites provides contiguous imagery across Earth, which offers inter-calibration opportunities no matter where the probe observes, except over the poles, where GEO satellite views are not possible.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}