Drone-Borne Hyperspectral and Magnetic Data Integration: Otanmäki Fe-Ti-V Deposit in Finland

 , , and
, , and 
Abstract
:
1. Introduction
2. Location and Geology
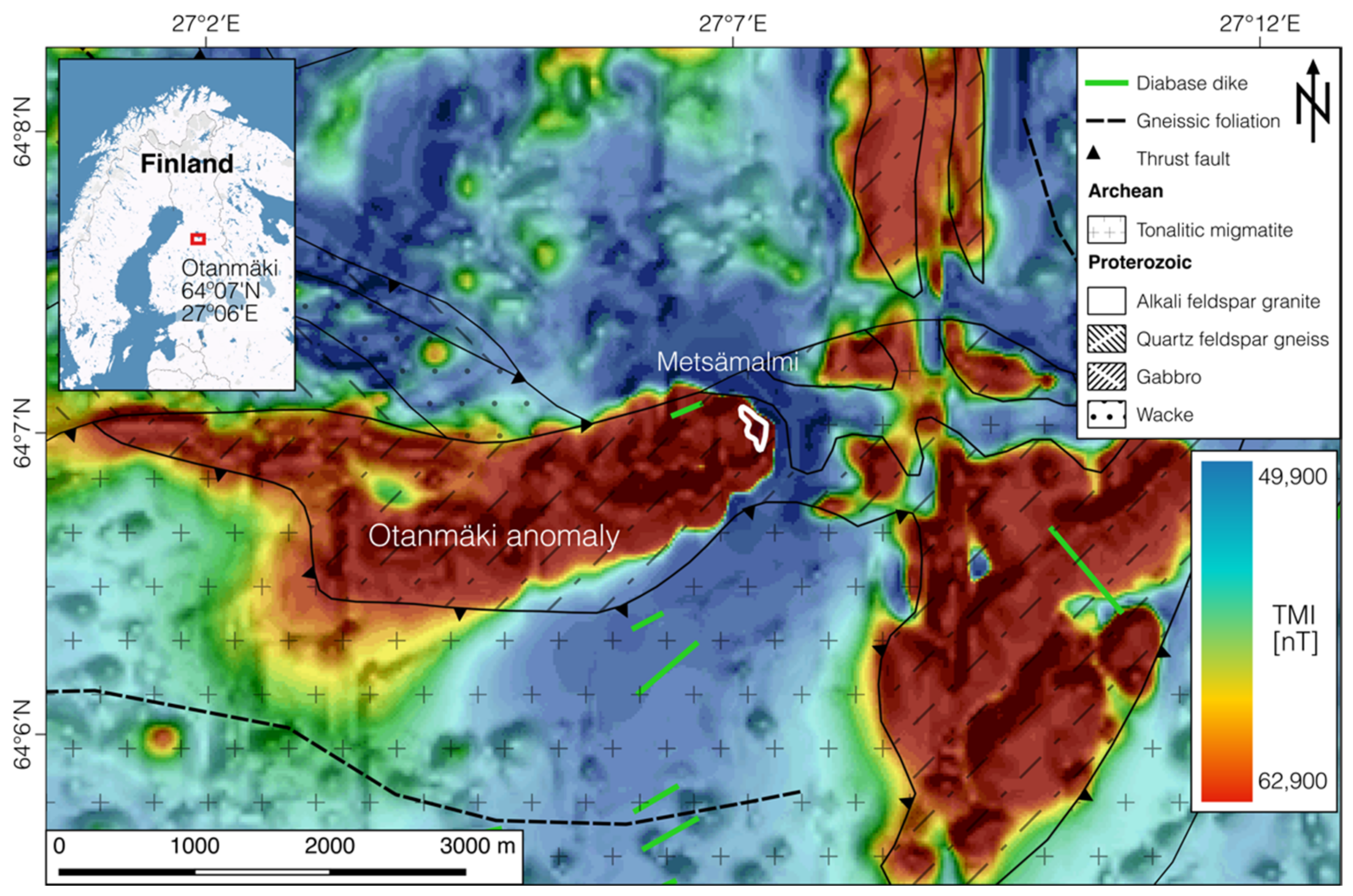
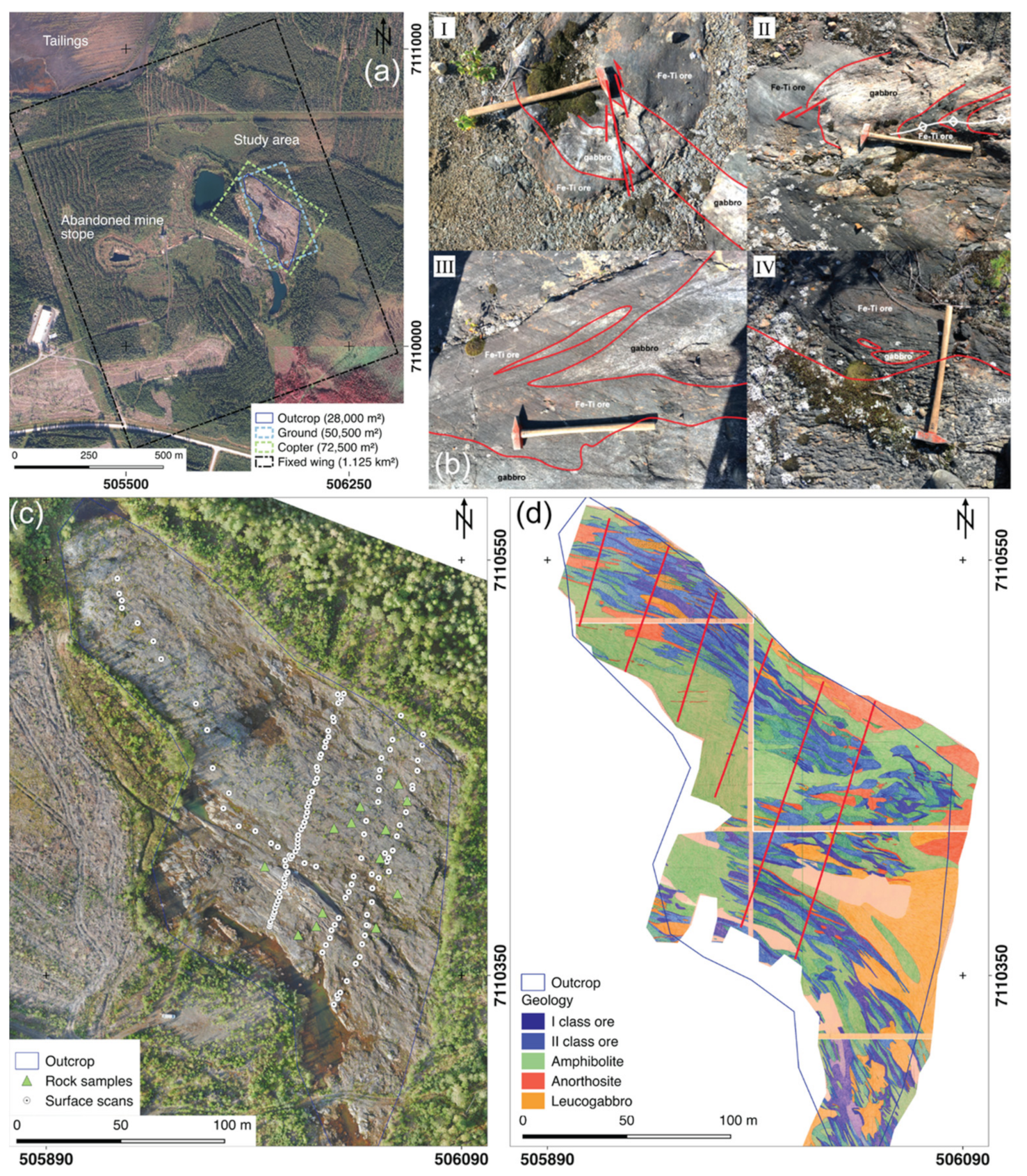
2.1. Regional Setting and Description of the Study Area
2.2. Geologic Setting
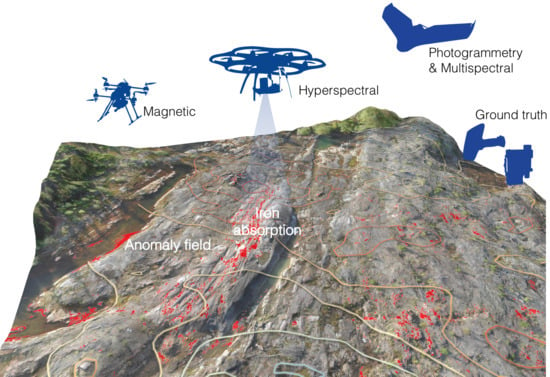
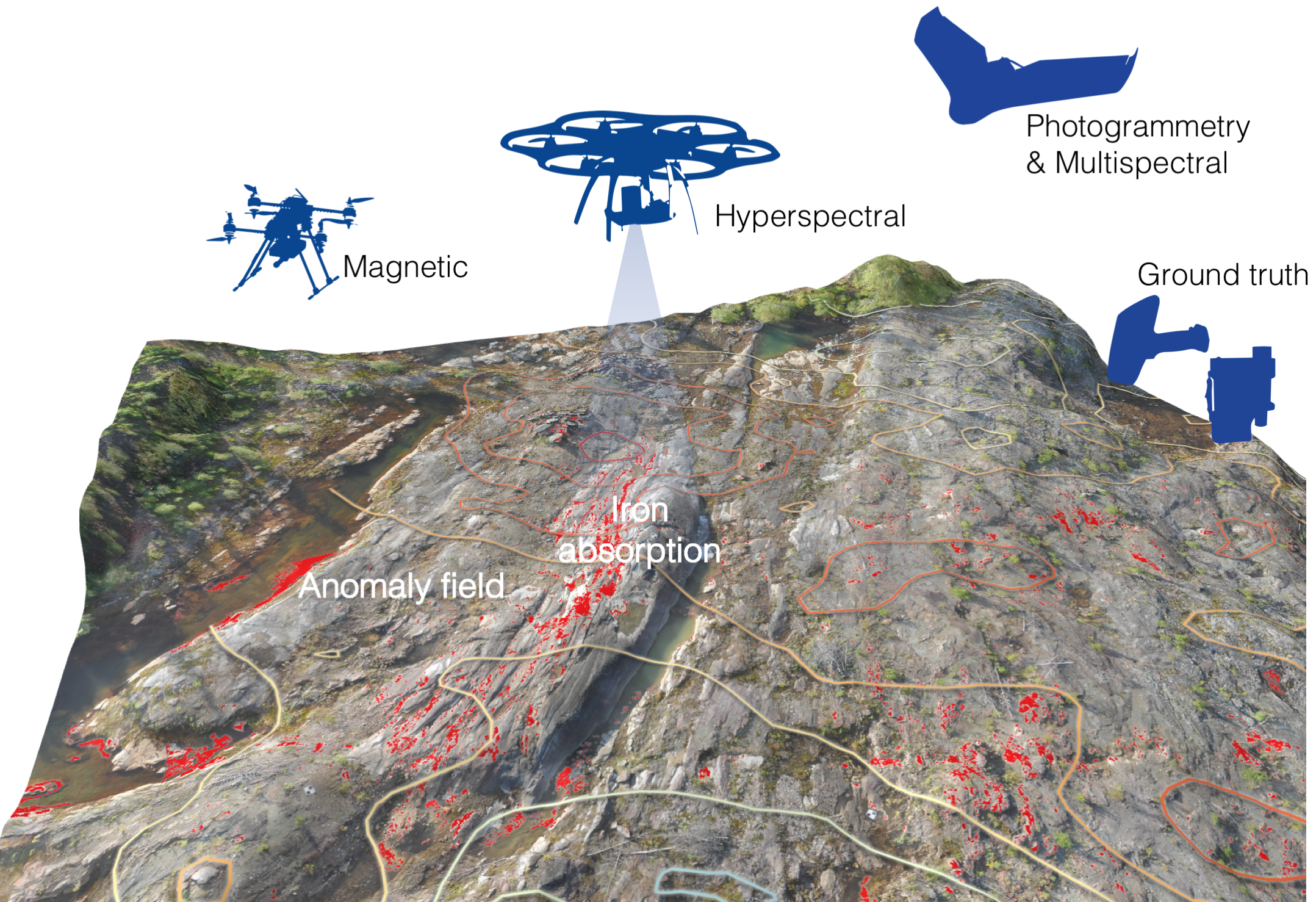
3. Methods and Survey Strategies
3.1. Survey Outline
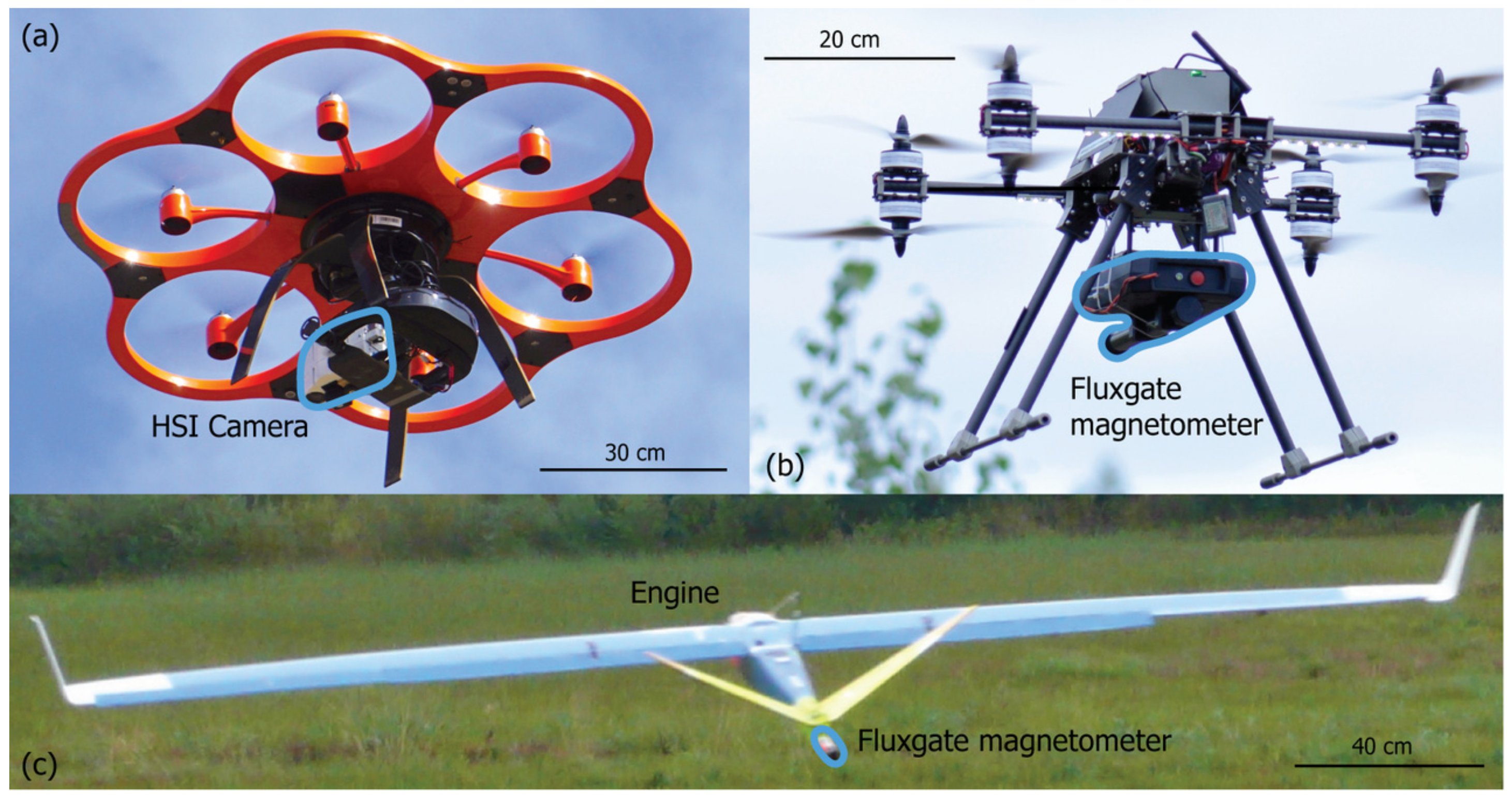
3.2. Multispectral UAS Imaging
3.3. Hyperspectral UAS Imaging
- Hematite GDS27 (alpha-Fe2O3 – pure hematite) → proxy for iron-oxides [50]
- Goethite WS222 (FeOOH – polymorphous with akaganeite, feroxyhyte, and lepidocrocite) → proxy for iron oxide-hydroxide
- Jarosite GDS 99 Ky200C Syn (KFe+33(SO4)2(OH)6 – synthetic) → proxy for iron-sulphates
3.4. Structure-from-Motion Multi-Vision Stereo Photogrammetry
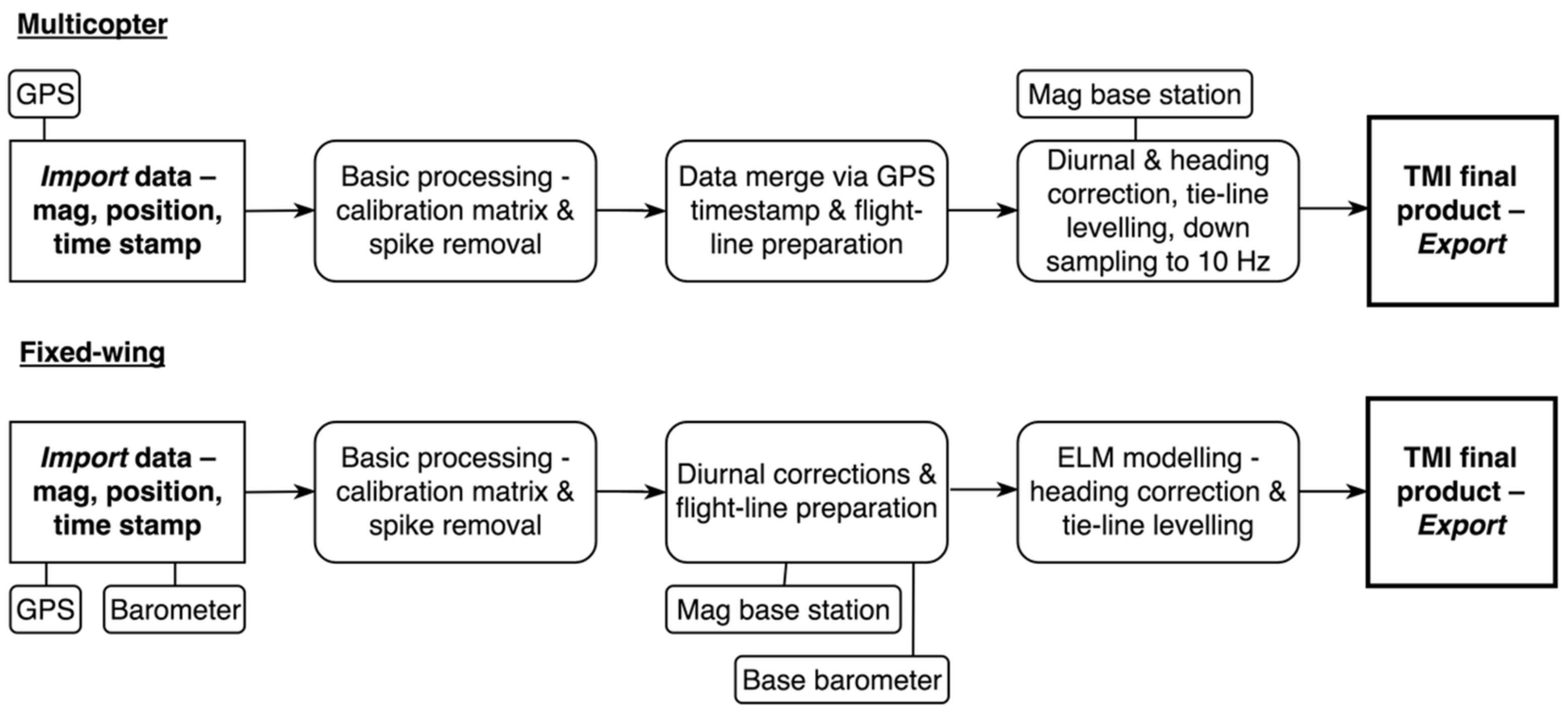
3.5. Copter-Borne Magnetic Measurements
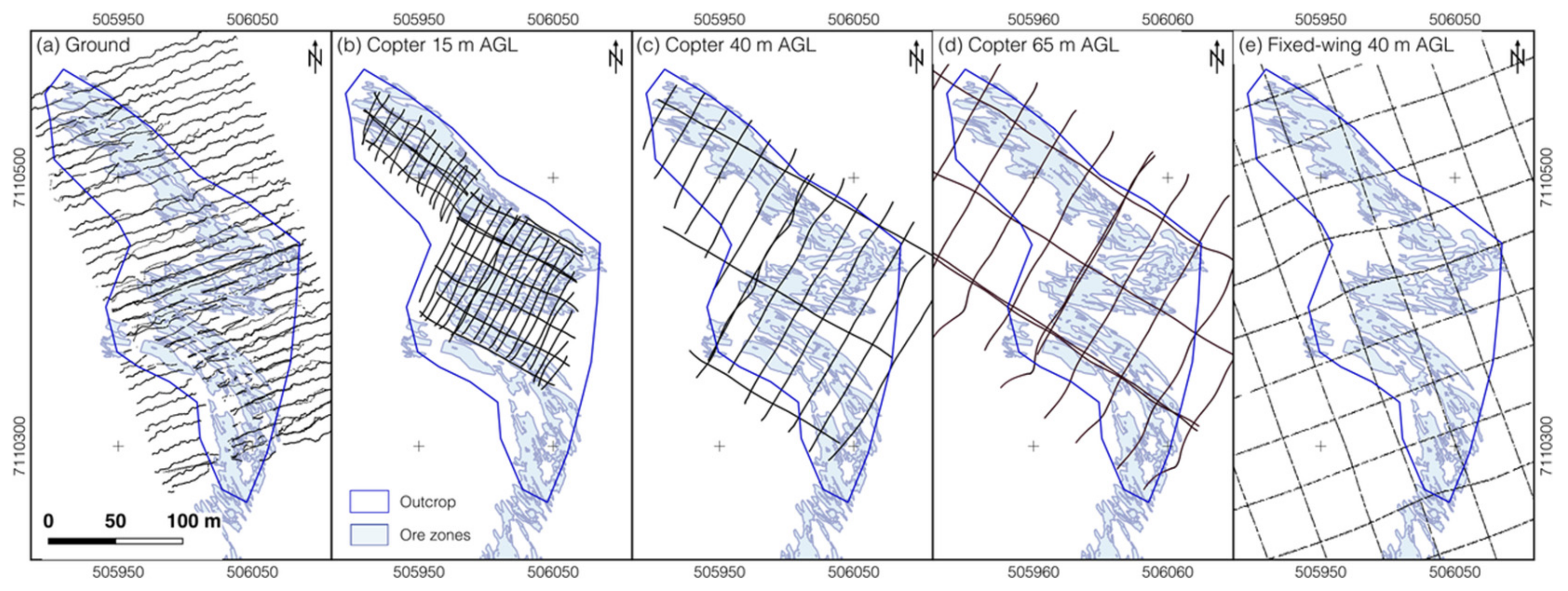
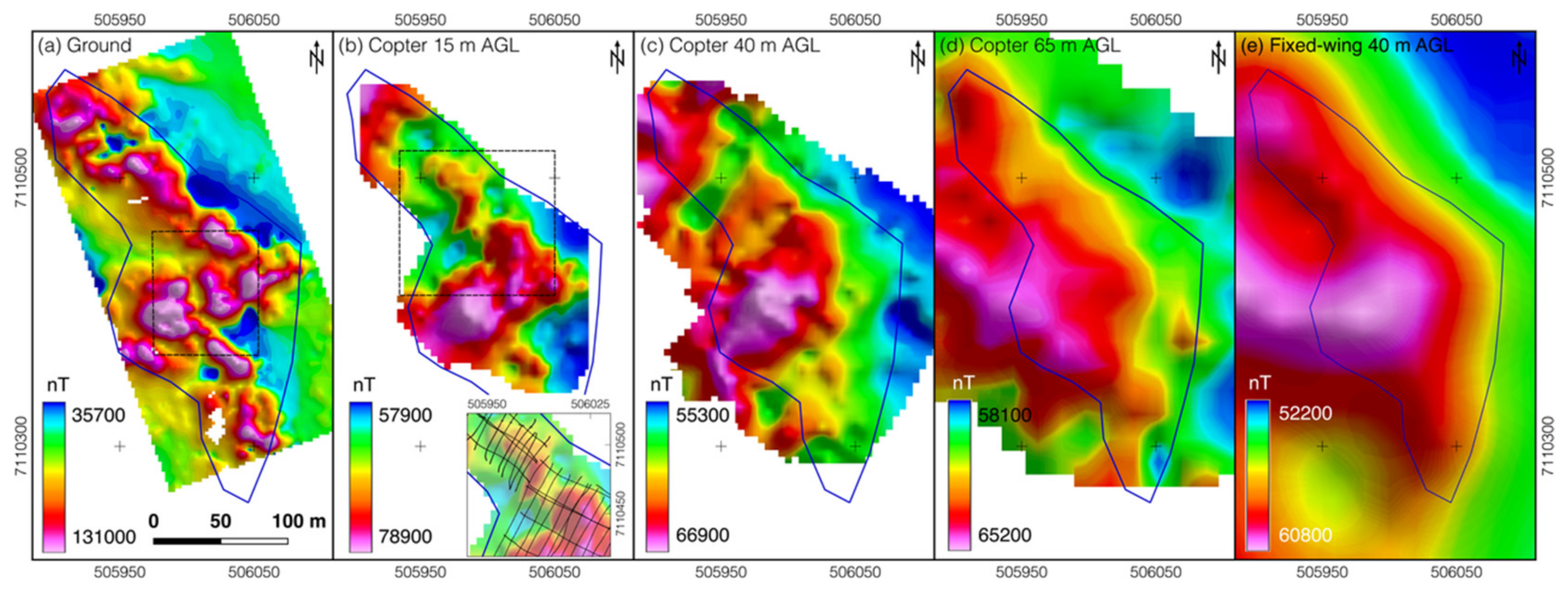
- 15 m: Collect a UAS magnetic dataset close to surface, but within acceptable flight safety margins, for dense spatial coverage approaching the resolution of ground magnetics.
- 40 m: Compare multicopter and fixed-wing data at similar operation height.
- 65 m: Perform high altitude UAS survey to examine the regional behaviour of the anomaly and to have a dataset that can serve as a reference for upward continuations of the other datasets.
3.6. Fixed-Wing Magnetic Measurements
3.7. Ground Truth—Magnetic Survey
3.8. Ground Truth—pXRF, Spectroscopy, Susceptibility, Sampling
4. Results
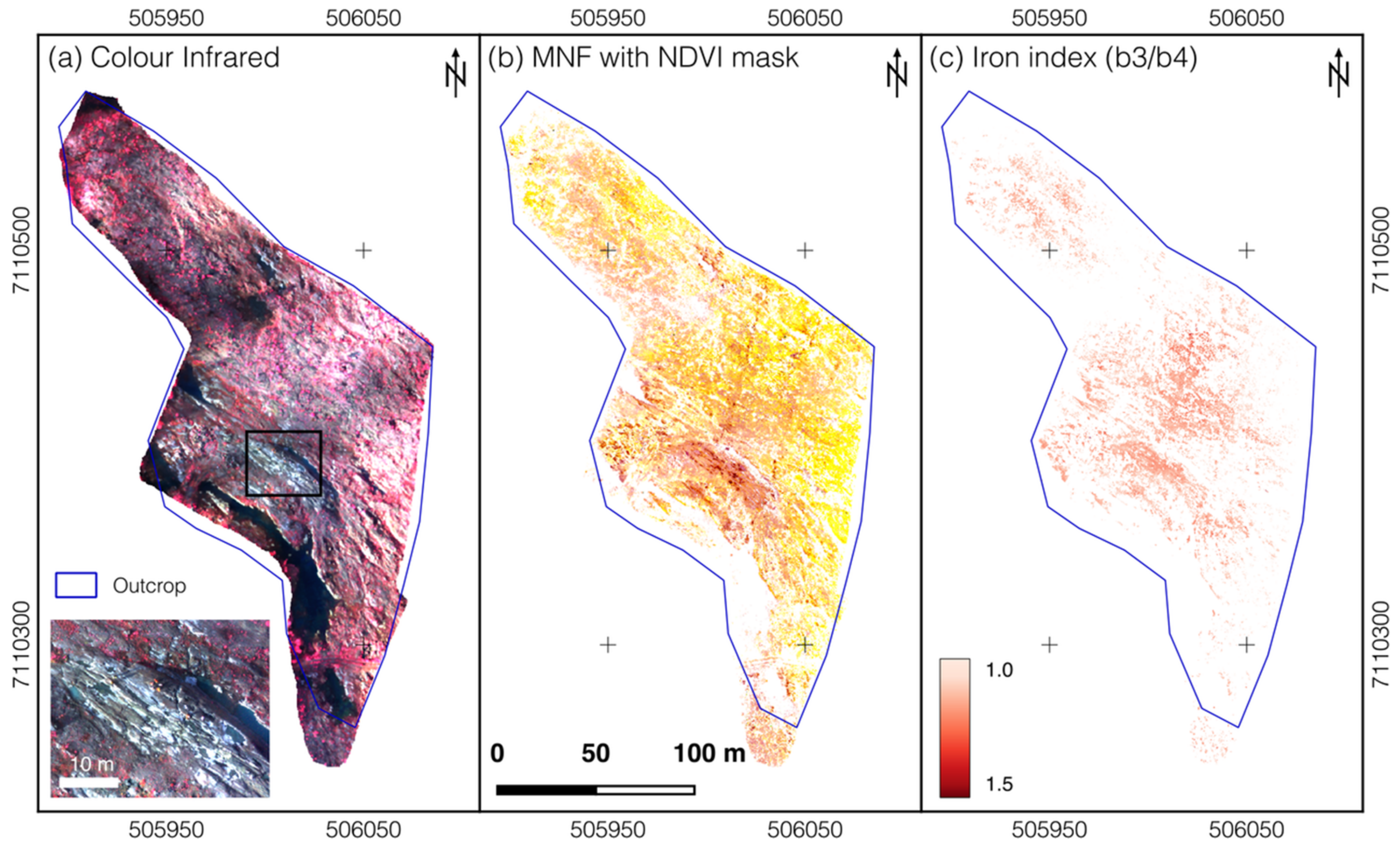
4.1. UAS Multispectral Imagery
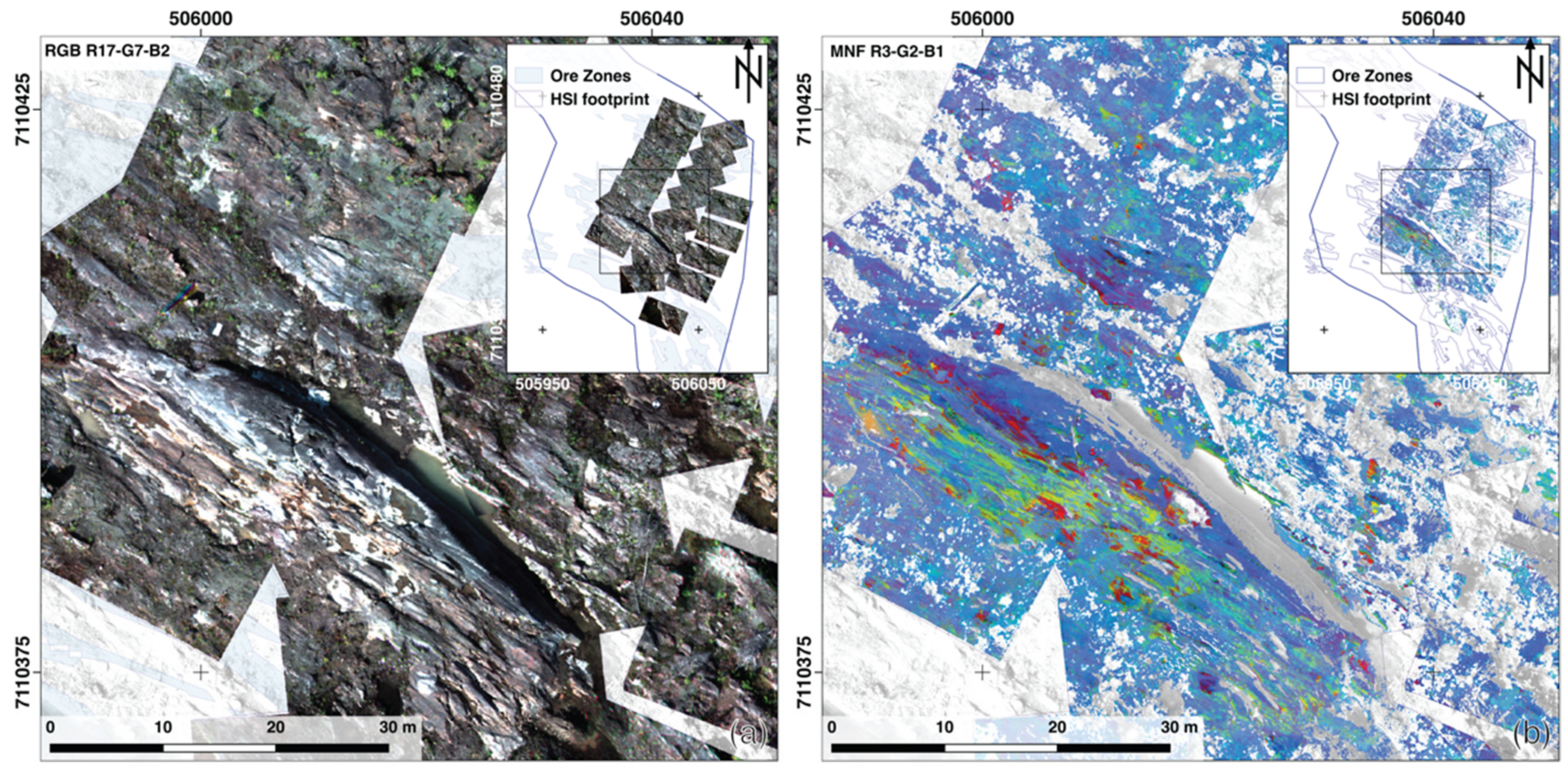
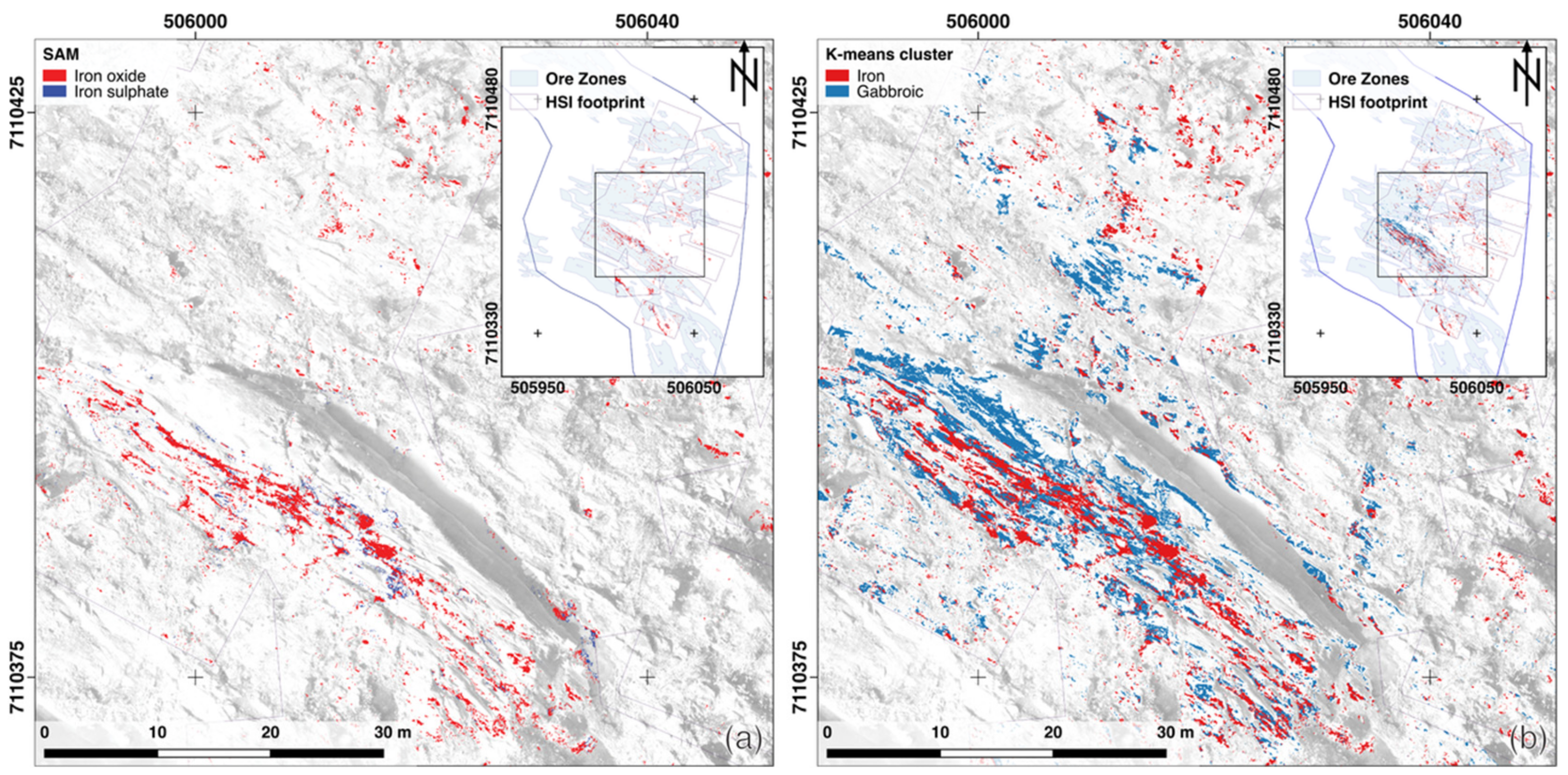
4.2. UAS Hyperspectral Imagery
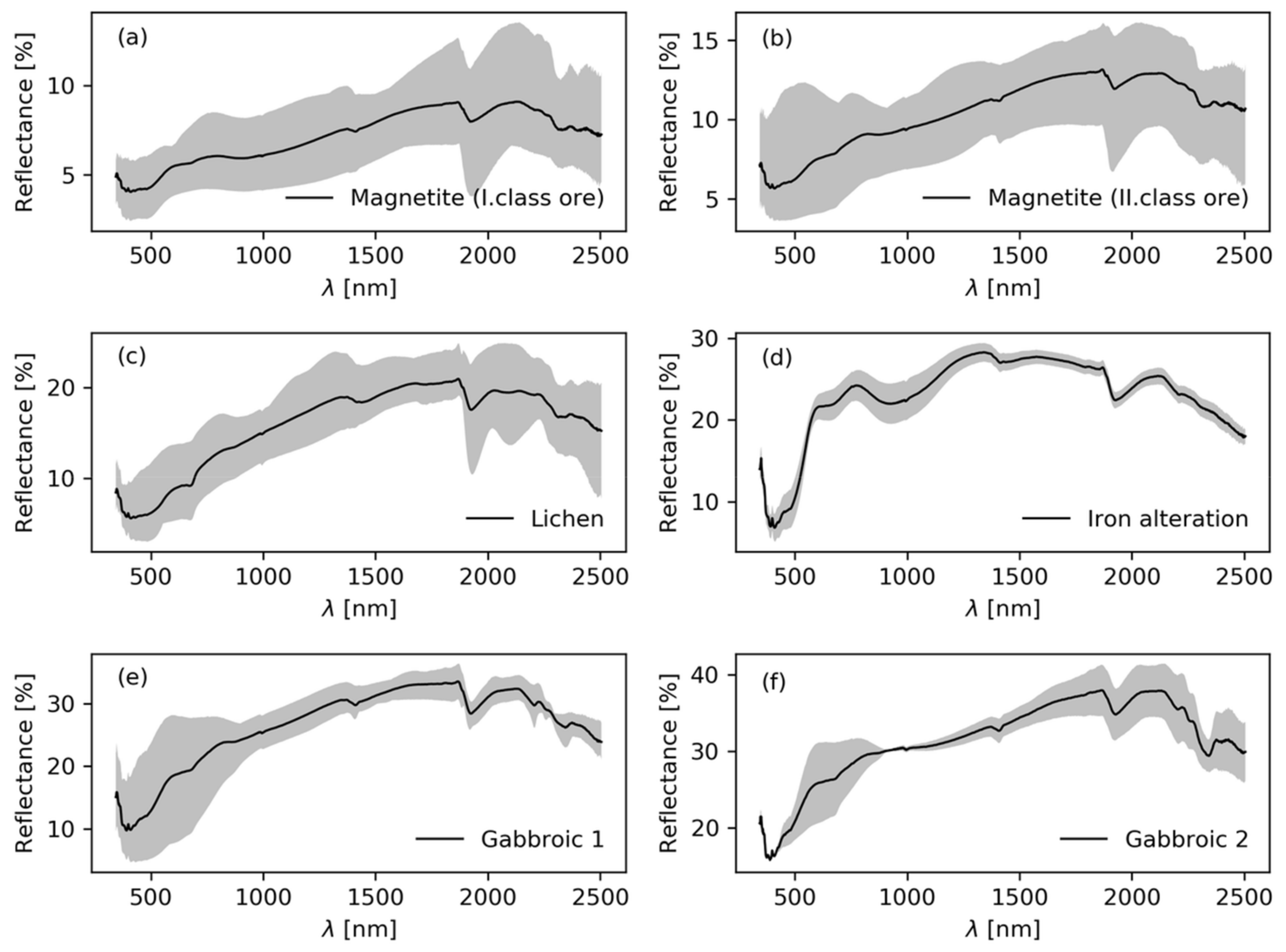
4.3. Handheld Spectroscopy
4.4. UAS-HSI Accuracy Assessment
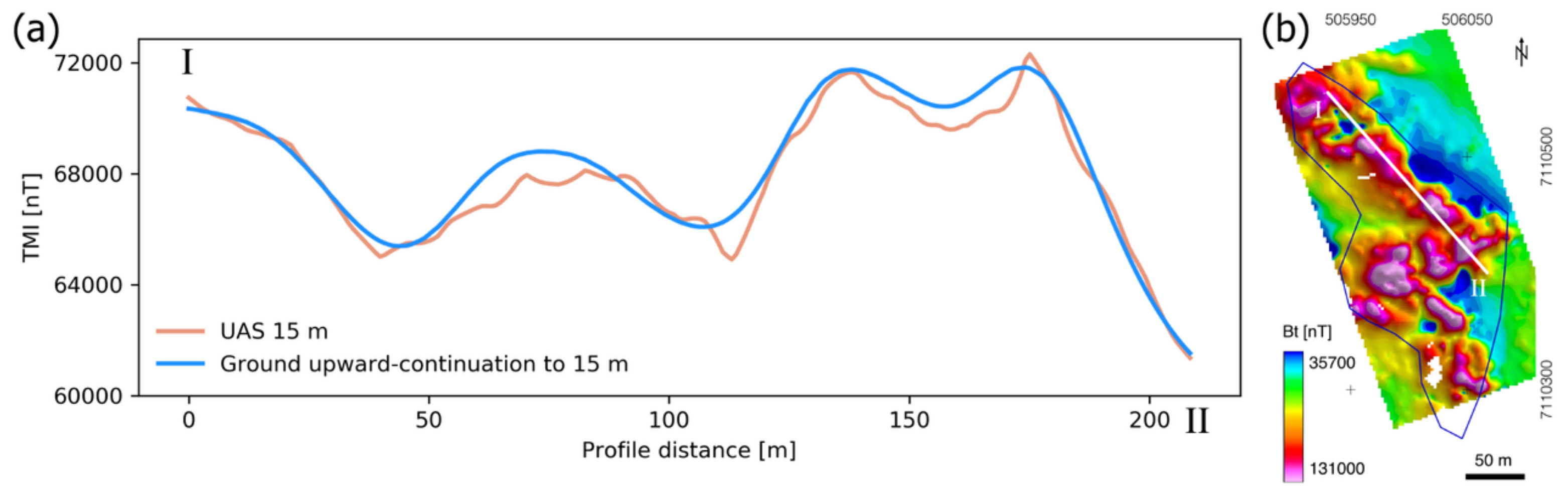
4.5. Magnetics—Ground and UAS-Borne
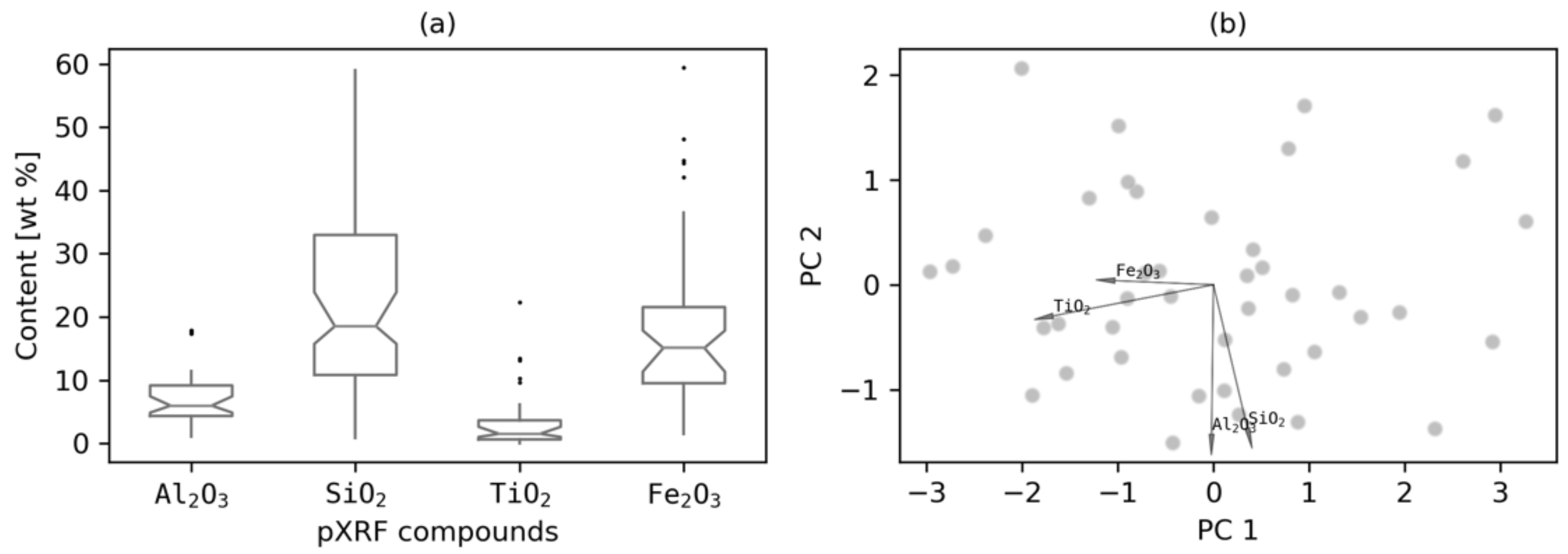
4.6. Geochemistry
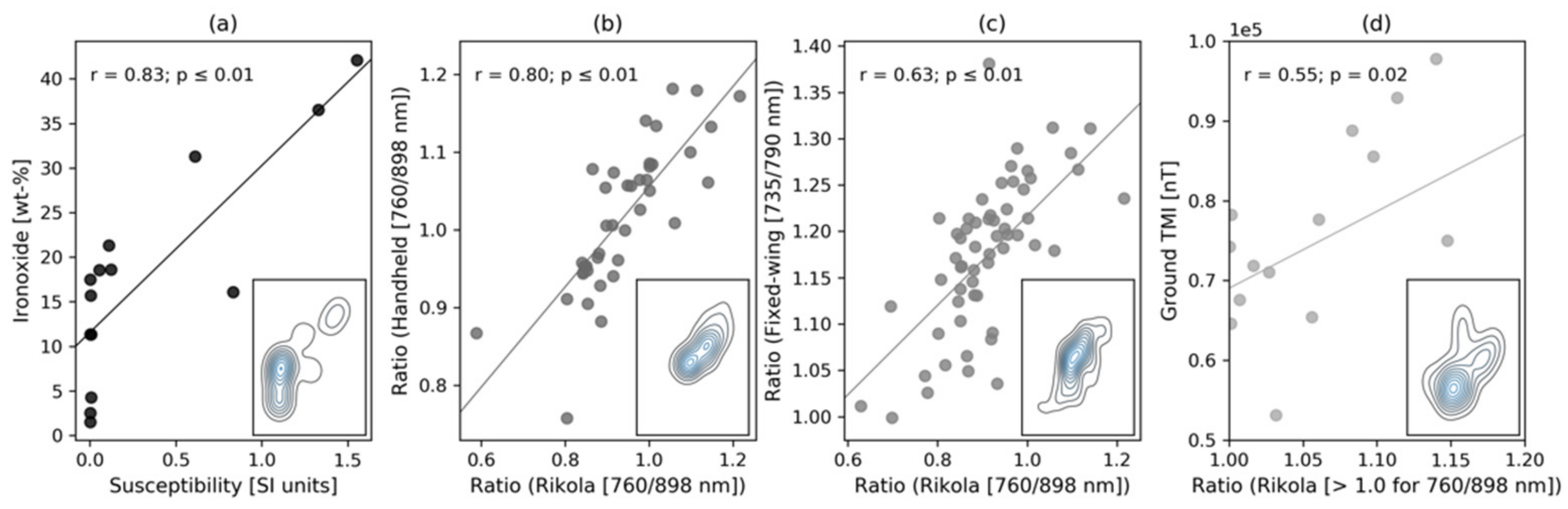
4.7. Integration of Ground Truth and Multicopter Data
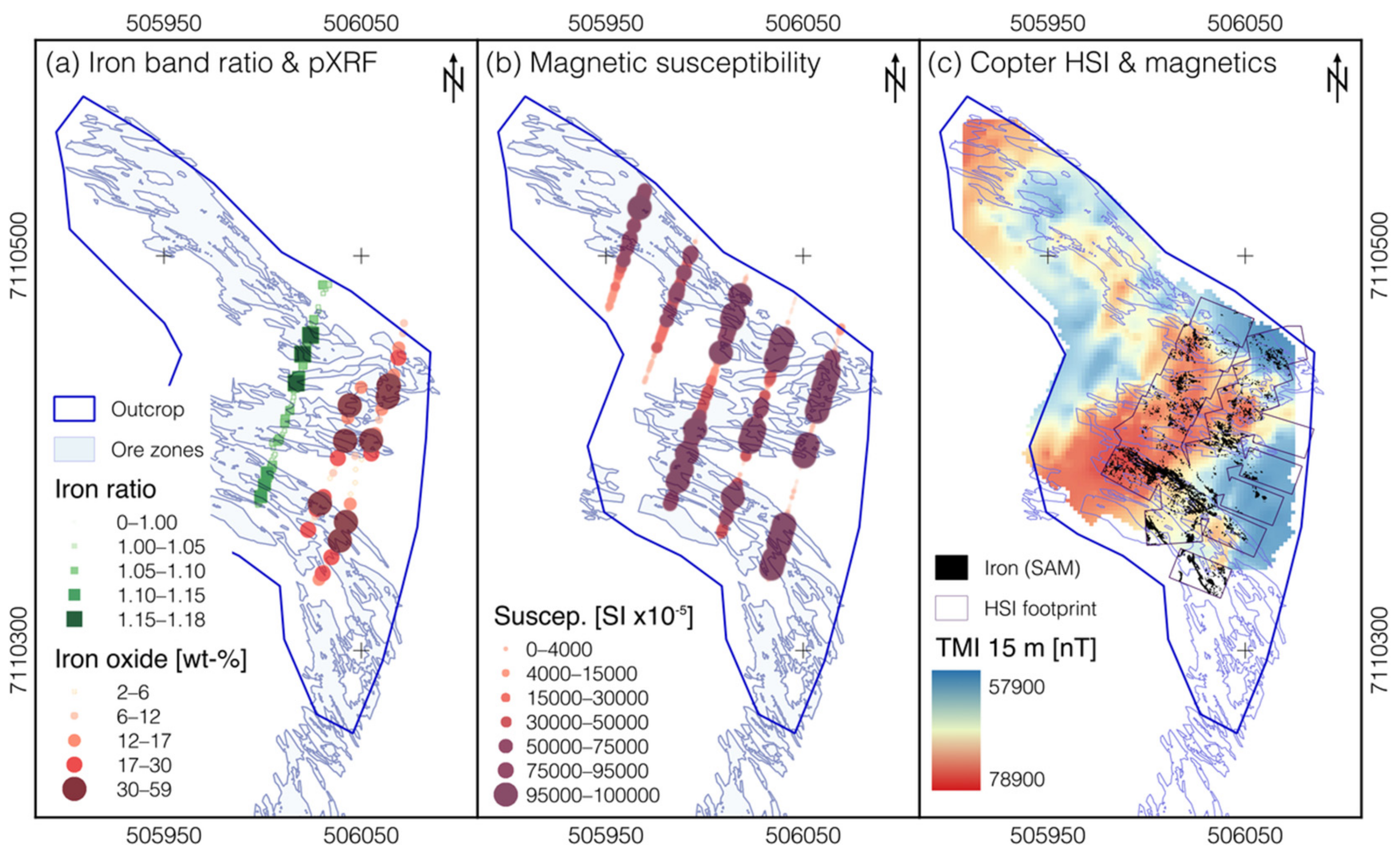
4.8. Data Integration
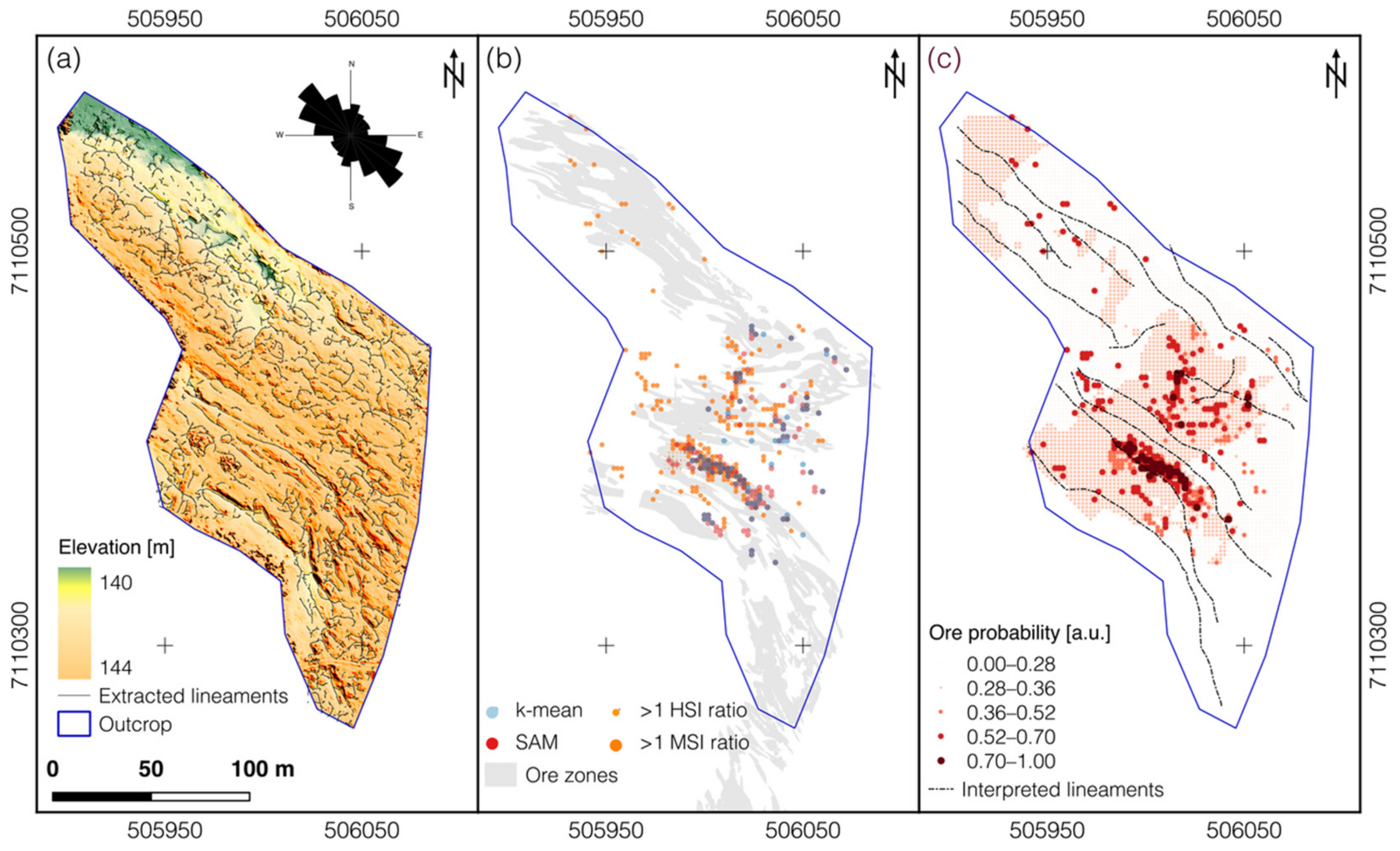
4.9. Geologic Interpretation and Ore Class Estimation
- MSI and HSI UAS surface classifications were binarized (unclassified and classified pixels are either 0 or 1) and the 15 m TMI data was normalized between 0–1. By doing so, mostly the highest TMI areas contribute to the surface feature map.
- Normalized weighted arithmetic mean of the HSI, MSI and TMI datasets was computed.
- High values in the resulting map (Figure 16c) represent high ore probability.
- Interpreted lineaments are spatially joined with the proceptivity map, to give structural context.
5. Discussion
5.1. Consequences of UAS Imaging
5.2. Consequences of UAS Magnetic Measurements
5.3. Can Drone-Borne Analysis Compete with Airborne Survey and Outperform Ground-Based Acquisition?
- Consistency of models is maintained (e.g., high spatial precision).
- Improved reliability and reduced errors in mapping and predictions.
- Classification of domains (e.g., minerals, surface and subsurface structures) that consist of several non-linear features.
- The applicability of multi-spectral UAS data for derivation of traces, structures, and shapes of geological features.
6. Conclusions
- Iron-bearing phases can be successfully mapped by both UAS-borne multi- and hyperspectral sensors in the VNIR.
- UAS-borne fluxgate magnetometers are able to map magnetic anomalies under survey conditions.
- Low altitude (i.e., 15 m AGL) multicopter magnetic data correlates to ground survey magnetic data, while higher flight altitude data describes the regional magnetic field.
- Magnetic anomalies can be associated to spectral anomalies at the surface by using ground truth.
- UAS-HSI and magnetic survey complement each other.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Schoer, K.; Weinzettel, J.; Kovanda, J.; Giegrich, J.; Lauwigi, C. Raw Material Consumption of the European Union–Concept, Calculation Method, and Results. Environ. Sci. Technol. 2012, 46, 8903–8909. [Google Scholar] [CrossRef]
- Massari, S.; Ruberti, M. Rare earth elements as critical raw materials: Focus on international markets and future strategies. Resour. Policy 2013, 38, 36–43. [Google Scholar] [CrossRef]
- Ali, S.H.; Giurco, D.; Arndt, N.; Nickless, E.; Brown, G.; Demetriades, A.; Durrheim, R.; Enriquez, M.A.; Kinnaird, J.; Littleboy, A.; et al. Mineral supply for sustainable development requires resource governance. Nature 2017, 543, 367–372. [Google Scholar] [CrossRef]
- The European Commission. Communication from the Commission to the European Parliament, the Council, The European Economic and Social Committee and the Committee of the Regions on the 2017 List of Critical Raw Materials for the EU; EU: Brussels, Belgium, 13 September 2017. [Google Scholar]
- Gloaguen, R.; Ghamisi, P.; Lorenz, S.; Kirsch, M.; Zimmermann, R.; Booysen, R.; Andreani, L.; Jackisch, R.; Hermann, E.; Tusa, L.; et al. The Need for Multi-Source, Multi-Scale Hyperspectral Imaging to Boost Non-Invasive Mineral Exploration. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 7430–7433. [Google Scholar]
- Henckens, M.L.C.M.; van Ierland, E.C.; Driessen, P.P.J.; Worrell, E. Mineral resources: Geological scarcity, market price trends, and future generations. Resour. Policy 2016, 49, 102–111. [Google Scholar] [CrossRef] [Green Version]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the current state of UAV regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Parshin, A.V.; Morozov, V.A.; Blinov, A.V.; Kosterev, A.N.; Budyak, A.E. Low-altitude geophysical magnetic prospecting based on multirotor UAV as a promising replacement for traditional ground survey Low-altitude geophysical magnetic prospecting based on multirotor UAV as a promising replacement for traditional ground survey. Geo-Spat. Inf. Sci. 2018, 1–8. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Rauhala, A.; Tuomela, A.; Davids, C.; Rossi, P.M. UAV remote sensing surveillance of a mine tailings impoundment in Sub-Arctic conditions. Remote Sens. 2017, 9, 1318. [Google Scholar] [CrossRef]
- Salvini, R.; Mastrorocco, G.; Seddaiu, M.; Rossi, D.; Vanneschi, C. The use of an unmanned aerial vehicle for fracture mapping within a marble quarry (Carrara, Italy): Photogrammetry and discrete fracture network modeling. Geomat. Nat. Hazards Risk 2017, 8, 34–52. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; Guillén-Climent, M.L.; Hernández-Clemente, R.; Catalina, A.; González, M.R.; Martín, P. Estimating leaf carotenoid content in vineyards using high resolution hyperspectral imagery acquired from an unmanned aerial vehicle (UAV). Agric. For. Meteorol. 2013, 171–172, 281–294. [Google Scholar] [CrossRef]
- Ham, Y.; Han, K.K.; Lin, J.J.; Golparvar-Fard, M. Visual monitoring of civil infrastructure systems via camera-equipped Unmanned Aerial Vehicles (UAVs): A review of related works. Vis. Eng. 2016, 4, 1. [Google Scholar] [CrossRef]
- Koucká, L.; Kopačková, V.; Fárová, K.; Gojda, M. UAV Mapping of an Archaeological Site Using RGB and NIR High-Resolution Data. Proceedings 2018, 2, 351. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tanhuanpää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef] [Green Version]
- Restas, A. Drone applications for supporting disaster management. World J. Eng. Technol. 2015, 3, 316. [Google Scholar] [CrossRef]
- Mancini, F.; Dubbini, M.; Gattelli, M.; Stecchi, F.; Fabbri, S.; Gabbianelli, G. Using Unmanned Aerial Vehicles (UAV) for High-Resolution Reconstruction of Topography: The Structure from Motion Approach on Coastal Environments. Remote Sens. 2013, 5, 6880–6898. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.M.; McDermid, G.J.; Strack, M.; Lovitt, J. A New Method to Map Groundwater Table in Peatlands Using Unmanned Aerial Vehicles. Remote Sens. 2017, 9, 1057. [Google Scholar] [CrossRef]
- Bemis, S.P.; Micklethwaite, S.; Turner, D.; James, M.R.; Akciz, S.; Thiele, S.T.; Bangash, H.A. Ground-based and UAV-Based photogrammetry: A multi-scale, high-resolution mapping tool for structural geology and paleoseismology. J. Struct. Geol. 2014, 69, 163–178. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landf. 2014, 39, 1413–1420. [Google Scholar] [CrossRef] [Green Version]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Kirsch, M.; Lorenz, S.; Zimmermann, R.; Tusa, L.; Möckel, R.; Hödl, P.; Booysen, R.; Khodadadzadeh, M.; Gloaguen, R. Integration of Terrestrial and Drone-Borne Hyperspectral and Photogrammetric Sensing Methods for Exploration Mapping and Mining Monitoring. Remote Sens. 2018, 10, 1366. [Google Scholar] [CrossRef]
- Dering, G.M.; Micklethwaite, S.; Thiele, S.T.; Vollgger, S.A.; Cruden, A.R. Review of drones, photogrammetry and emerging sensor technology for the study of dykes: Best practises and future potential. J. Volcanol. Geotherm. Res. 2019. [Google Scholar] [CrossRef]
- Gavazzi, B.; Le Maire, P.; Munschy, M.; Dechamp, A. Fluxgate vector magnetometers: A multisensor device for ground, UAV, and airborne magnetic surveys. Lead. Edge 2016, 35, 795–797. [Google Scholar] [CrossRef] [Green Version]
- Tezkan, B.; Stoll, J.B.; Bergers, R.; Großbach, H. Unmanned aircraft system proves itself as a geophysical measuring platform for aeromagnetic surveys. First Break 2011, 29, 103–105. [Google Scholar]
- Koyama, T.; Kaneko, T.; Ohminato, T.; Yanagisawa, T.; Watanabe, A.; Takeo, M. An aeromagnetic survey of Shinmoe-dake volcano, Kirishima, Japan, after the 2011 eruption using an unmanned autonomous helicopter. Earth Planets Sp. 2013, 65, 657–666. [Google Scholar] [CrossRef] [Green Version]
- Cunningham, M.; Samson, C.; Wood, A.; Cook, I. Aeromagnetic Surveying with a Rotary-Wing Unmanned Aircraft System: A Case Study from a Zinc Deposit in Nash Creek, New Brunswick, Canada. Pure Appl. Geophys. 2018, 175, 3145–3158. [Google Scholar] [CrossRef]
- Parvar, K.; Braun, A.; Layton-Matthews, D.; Burns, M. UAV magnetometry for chromite exploration in the Samail ophiolite sequence, Oman. J. Unmanned Veh. Syst. 2018, 6, 57–69. [Google Scholar] [CrossRef]
- Callum, W.; Braun, A.; Fotopoulos, G. Impact of 3-D attitude variations of a UAV magnetometry system on magnetic data quality. Geophys. Prospect. 2018, 1–15. [Google Scholar]
- Samson, C.; Straznicky, P.; Laliberté, J.; Caron, R.; Ferguson, S.; Archer, R. Designing and Building an Unmanned Aircraft System for Aeromagnetic Surveying. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Tulsa, OK, USA, 2010; pp. 1167–1171. [Google Scholar] [CrossRef]
- Airo, M.-L. Aerogeophysics in Finland 1972–2004: Methods, System Characteristics and Applications. In Special Paper-Geological Survey of Finland; Society of Exploration Geophysicists: Tulsa, OK, USA, 2005; Volume 39, 197p. [Google Scholar]
- Pääkkönen, V. Otanmäki—The Ilmenite Magnetite Ore Field in Finland. In Bull. la Commision Geol. Finlande; Geological Survey of Finland: Espoo, Finland, 1956; p. 87. [Google Scholar]
- Lindholm, O.; Anttonen, R. Geology of the Otanmäki mine. In Proc. 26th Int. Geol. Congr. Guid. to Excursions 078 A+C, Part 2 (Finland); Häkli, T.A., Ed.; Mindat: Keswick, VA, USA, 1980; pp. 25–33. [Google Scholar]
- Huhma, H.; Hanski, E.; Kontinen, A.; Vuollo, J.; Mänttäri, I.; Lahyey, J. Sm–Nd and U–Pb isotope geochemistry of the Palaeoproterozoic mafic magmatism in eastern and northern Finland. Bulletin 2018, 405, 150. [Google Scholar]
- Lahti, I.; Salmirinne, H.; Kärenlampi, K.; Jylänki, J. Geophysical surveys and modeling of Nb–Zr–REE deposits and Fe–Ti–V ore-bearing gabbros in the Otanmäki area, central Finland. In GTK Open File Work Report; Geological Survey of Finland: Espoo, Finland, 2018; Volume 75, pp. 1–31. [Google Scholar]
- Hokka, J.; Lepistö, S. JORC Report-Mineral Resource Estimate for Otanmäki V-Ti-Fe Project; Geological Survey of Finland: Espoo, Finland, 2018. [Google Scholar]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Jakob, S.; Zimmermann, R.; Gloaguen, R. The Need for Accurate Geometric and Radiometric Corrections of Drone-Borne Hyperspectral Data for Mineral Exploration: MEPHySTo-A Toolbox for Pre-Processing Drone-Borne Hyperspectral Data. Remote Sens. 2017, 9, 88. [Google Scholar] [CrossRef]
- Makelainen, A.; Saari, H.; Hippi, I.; Sarkeala, J.; Soukkamaki, J. 2D Hyperspectral Frame Imager Camera Data in Photogrammetric Mosaicking. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 1, 263–267. [Google Scholar] [CrossRef]
- Karpouzli, E.; Malthus, T. The empirical line method for the atmospheric correction of IKONOS imagery. Int. J. Remote Sens. 2003, 24, 1143–1150. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef] [Green Version]
- Green, A.A.; Berman, M.; Switzer, P.; Craig, M.D. A Transformation for Ordering Multispectral Data in Terms of Image Quality with Implications for Noise Removal. IEEE Trans. Geosci. Remote Sens. 1988, 26, 65–74. [Google Scholar] [CrossRef]
- Tou, J.T.; Gonzalez, R.C. Pattern Recognition Principles; Addison-Wesley Pub. Co.: Boston, MA, USA, 1974. [Google Scholar]
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.W.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The spectral image processing system (SIPS)—interactive visualization and analysis of imaging spectrometer data. Remote Sens. Environ. 1993, 44, 145–163. [Google Scholar] [CrossRef]
- Van Ruitenbeek, F.J.A.; Debba, P.; van der Meer, F.D.; Cudahy, T.; van der Meijde, M.; Hale, M. Mapping white micas and their absorption wavelengths using hyperspectral band ratios. Remote Sens. Environ. 2006, 102, 211–222. [Google Scholar] [CrossRef]
- Hunt, G.R.; Ashley, R.P. Spectra of altered rocks in the visible and near infrared. Econ. Geol. 1979, 74, 1613–1629. [Google Scholar] [CrossRef]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Jackisch, R.; Lorenz, S.; Zimmermann, R.; Möckel, R.; Gloaguen, R. Drone-Borne Hyperspectral Monitoring of Acid Mine Drainage: An Example from the Sokolov Lignite District. Remote Sens. 2018, 10, 385. [Google Scholar] [CrossRef]
- Kokaly, R.F.; Clark, R.N.; Swayze, G.A.; Livo, K.E.; Hoefen, T.M.; Pearson, N.C.; Wise, R.A.; Benzel, W.M.; Lowers, H.A.; Driscoll, R.L.; et al. USGS Spectral Library Version 7; U.S. Geological Survey: Reston, VA, USA, 2017; p. 61.
- Puranen, R. Susceptibilities, Iron and Magnetite Content of Precambrian Rocks in Finland; Geological Survey of Finland: Espoo, Finland, 1989. [Google Scholar]
- Smith, M.W.; Carrivick, J.L.; Quincey, D.J. Structure from motion photogrammetry in physical geography. Prog. Phys. Geogr. 2016, 40, 247–275. [Google Scholar] [CrossRef]
- Andreani, L.; Gloaguen, R. Geomorphic analysis of transient landscapes in the Sierra Madre de Chiapas and Maya Mountains (northern Central America): Implications for the North American-Caribbean-Cocos plate boundary. Earth Surf. Dyn. 2016, 4, 71–102. [Google Scholar] [CrossRef]
- Sensys Sensorik & Systemtechnologie GmBH. SENSYS FGM3D Matrix of Technical Parameters; SenSys: Rabenfelde, Germany, 2018; p. 3. [Google Scholar]
- Madriz, Y. Drone-Borne Geophysics: Magnetic Survey for Mineral Exploration. Master’s Thesis, TU Freiberg, Freiberg, Germany, 2019. [Google Scholar]
- Leliak, P. Identification and Evaluation of Magnetic-Field Sources of Magnetic Airborne Detector Equipped Aircraft. IRE Trans. Aerosp. Navig. Electron. 1961, 3, 95–105. [Google Scholar] [CrossRef]
- Pirttijärvi, M. Numerical Modeling and Inversion of Geophysical Electromagnetic Measurements Using a Thin Plate Model. Ph.D. Thesis, University of Oulu, Oulu, Finland, 2003. [Google Scholar]
- Constable, S.C.; Parker, R.L.; Constable, C.G. Occam’s inversion: A practical algorithm for generating smooth models from electromagnetic sounding data. Geophysics 1987, 52, 289–300. [Google Scholar] [CrossRef]
- Bruker. Bruker S1 Titan Model 600/800 GeoChem 2014 Data Sheet; Bruker: Kennewick, VA, USA, 2014. [Google Scholar]
- Luo, G.; Chen, G.; Tian, L.; Qin, K.; Qian, S.E. Minimum Noise Fraction versus Principal Component Analysis as a Preprocessing Step for Hyperspectral Imagery Denoising. Can. J. Remote Sens. 2016, 42, 106–116. [Google Scholar] [CrossRef]
- Hunt, G.R. Spectral signatures of particulate minerals in the visible and near infrared. Geophysics 1977, 42, 501–513. [Google Scholar] [CrossRef]
- Illi, J.; Lindholh, O.; Levanto, U.-M.; Nikula, J.; Pöyliö, E.; Vuoristo, E. Otanmäen kaivos. In Vuoriteoolisuus/Bergshanteringen no 2. In Finnish with English Summary; Vuorimiesyhdistys: Vaanta, Finland, 1985; pp. 98–107. [Google Scholar]
- Jollife, I.T.; Cadima, J. Principal component analysis: A review and recent developments. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2016, 374, 20150202. [Google Scholar] [CrossRef]
- Aitchison, J. The Statistical Analysis of Compositional Data. J. R. Stat. Soc. Ser. B 1982, 44, 139–160. [Google Scholar] [CrossRef]
- Otero, N.; Tolosana-Delgado, R.; Soler, A.; Pawlowsky-Glahn, V.; Canals, A. Relative vs. absolute statistical analysis of compositions: A comparative study of surface waters of a Mediterranean river. Water Res. 2005, 39, 1404–1414. [Google Scholar] [CrossRef]
- Pawlowsky-Glahn, V.; Buccianti, A. Compositional Data Analysis: Theory and Applications; Wiley: Weinheim, Germany, 2011; ISBN 9780470711354. [Google Scholar]
- Carranza, E.J.M. Geochemical Anomaly and Mineral Prospectivity Mapping in GIS; Elsevier: Amsterdam, The Netherlands, 2009; Volume 11, ISBN 978-0-444-51325-0. [Google Scholar]
- Tommaselli, A.M.G.; Santos, L.D.; Berveglieri, A.; Oliveira, R.; Honkavaara, E. A study on the variations of inner orientation parameters of a hyperspectral frame camera. ISPRS-Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-1, 429–436. [Google Scholar] [CrossRef]
- Tuck, L.; Samson, C.; Laliberte, J.; Wells, M.; Bélanger, F. Magnetic interference testing method for an electric fixed-wing unmanned aircraft system (UAS). J. Unmanned Veh. Syst. 2018, 6, 177–194. [Google Scholar] [CrossRef]
- Tuck, L.; Samson, C.; Polowick, C.; Laliberté, J. Real-time compensation of magnetic data acquired by a single-rotor unmanned aircraft system. Geophys. Prospect. 2019, 67, 1637–1651. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Tholeg Tho-R-PX8-12 | Aibotix Aibot X6v.2 | SenseFly Ebee Plus | Radai Albatros VT |
|---|---|---|---|---|
| Type | Multicopter | Multicopter | Fixed-wing | Fixed-wing |
| Rotors | 8 | 6 | 1 | 1 |
| MTOW * | 10 kg | 7 kg | 1.1 kg | 5 kg |
| Size | 70 × 70 × 35 cm | 105 × 105 × 45 cm | 110 cm wingspan | 2.8 m wingspan |
| Flight time | 20–25 min | 12–15 min | 59 min | 180 min |
| Velocity | 0–40 km/h | 0–30 km/h | 40–110 km/h | 50–110 km/h |
| Payload | 4.5 kg | 2 kg | ~0.2 kg | 2 kg |
| Sensor | Fluxgate magnetometer | Rikola HSI camera | RGB camera, 4 band multispectral camera | Fluxgate magnetometer |
| Parameter | Value |
|---|---|
| Image Resolution | 1010 × 648 Pixel |
| Bands | 50 |
| Spectral range | 504–900 nm |
| Spatial/Spectral resolution | 3 cm/8 nm |
| FWHM | ~14 nm |
| Band integration time | 10–50 ms (depending on illumination) |
| Focal length | 9 mm |
| F-number | 2.8 |
| Weight | 720 g |
| SODA | Sequoia | |
|---|---|---|
| Images/Altitude | 241/103 m AGL | 98/84 m AGL |
| Orthophoto/DSM–Ground pixel resolutions | 2.2 cm/4.3 cm | 7.4 cm/- |
| GCPs number/Mean GCP RMSE | 12/8.1 cm | 11/43.8 cm |
| Parameter | Value |
|---|---|
| Resolution | >0.15 nT |
| Baseline error (200 Hz sampling) | <4 nT |
| Fluxgate axes declination | ≤±0.5º |
| Weight | 800 g |
| Method | Area | Survey Length | Height AGL | Survey Time | Speed | Inline/Tie-Line Spacing |
|---|---|---|---|---|---|---|
| Ground Survey | 50,500 m2 | 9.5 km | 1.7 m | 3 days | ~0.1 m/s | 10/- m |
| Multicopter * | 19,000 m2 | 4.1 km | 15 m | 32 min | 5 m/s | 7/20 m |
| Multicopter | 37,000 m2 | 3.2 km | 40 m | 19 min | 5 m/s | 20/80 m |
| Multicopter | 72,500 m2 | 3.7 km | 65 m | 25 min | 5 m/s | 35/60 m |
| Fixed-wing | 1.14 km2 | 69.6 km | 40 m | 57 min | 20 m/s | 40/40 m |
| Parameter (Bt) | Ground Survey | Multicopter 15 m AGL | Multicopter 40 m AGL | Multicopter 65 m AGL | Fixed-Wing 40 m AGL |
|---|---|---|---|---|---|
| Min. | 37,480 nT | 60,130 nT | 61,100 nT | 60,610 nT | 56,400 nT |
| Max. | 131,490 nT | 78,980 nT | 67,370 nT | 64,790 nT | 61,240 nT |
| Mean | 68,140 nT | 69,960 nT | 64,250 nT | 63,170 nT | 59,320 nT |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jackisch, R.; Madriz, Y.; Zimmermann, R.; Pirttijärvi, M.; Saartenoja, A.; Heincke, B.H.; Salmirinne, H.; Kujasalo, J.-P.; Andreani, L.; Gloaguen, R. Drone-Borne Hyperspectral and Magnetic Data Integration: Otanmäki Fe-Ti-V Deposit in Finland. Remote Sens. 2019, 11, 2084. https://doi.org/10.3390/rs11182084
Jackisch R, Madriz Y, Zimmermann R, Pirttijärvi M, Saartenoja A, Heincke BH, Salmirinne H, Kujasalo J-P, Andreani L, Gloaguen R. Drone-Borne Hyperspectral and Magnetic Data Integration: Otanmäki Fe-Ti-V Deposit in Finland. Remote Sensing. 2019; 11(18):2084. https://doi.org/10.3390/rs11182084
Chicago/Turabian StyleJackisch, Robert, Yuleika Madriz, Robert Zimmermann, Markku Pirttijärvi, Ari Saartenoja, Björn H. Heincke, Heikki Salmirinne, Jukka-Pekka Kujasalo, Louis Andreani, and Richard Gloaguen. 2019. "Drone-Borne Hyperspectral and Magnetic Data Integration: Otanmäki Fe-Ti-V Deposit in Finland" Remote Sensing 11, no. 18: 2084. https://doi.org/10.3390/rs11182084