Application of a Continuous Terrestrial Photogrammetric Measurement System for Plot Monitoring in the Beijing Songshan National Nature Reserve



Abstract
:
1. Introduction
2. Materials and Methods
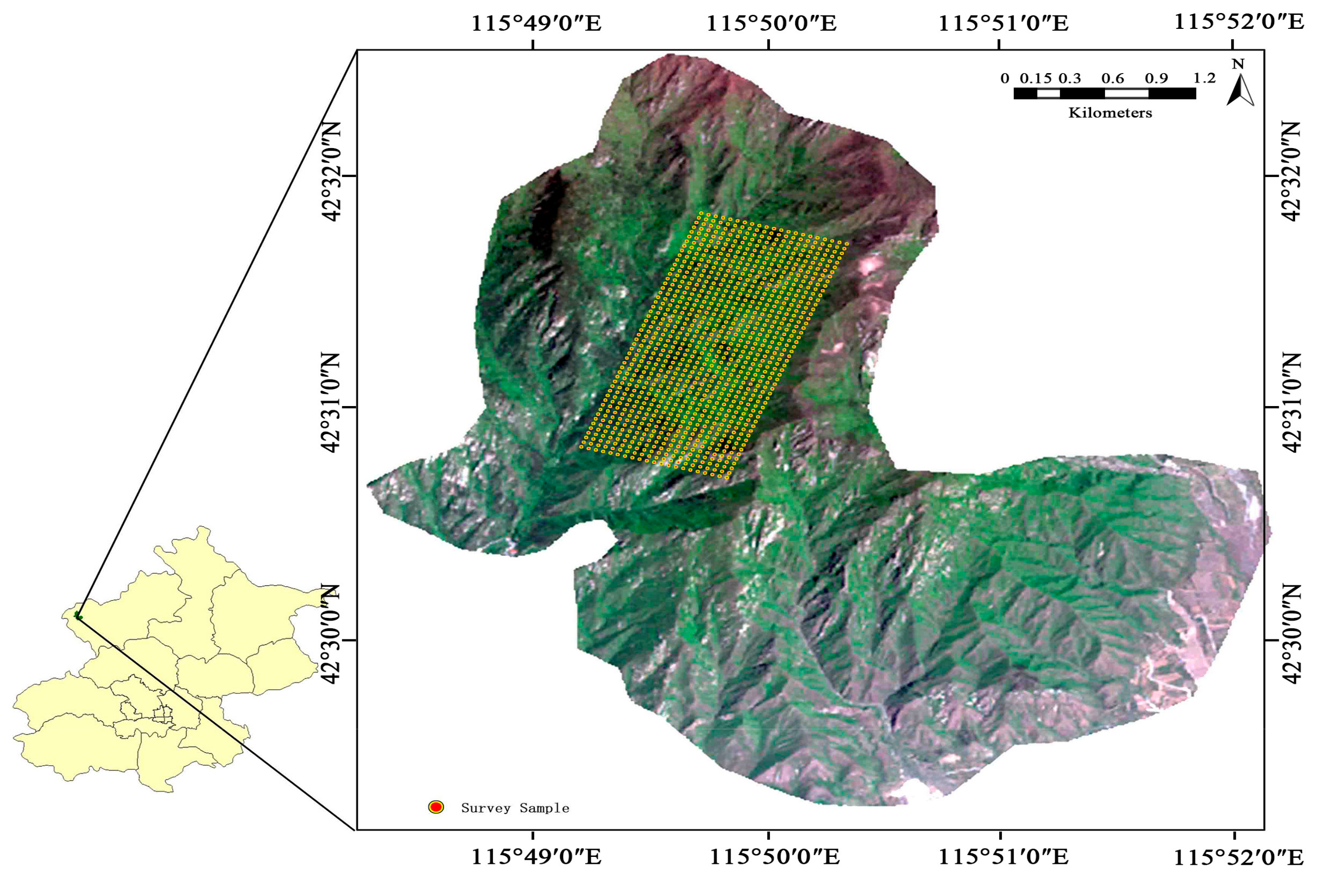
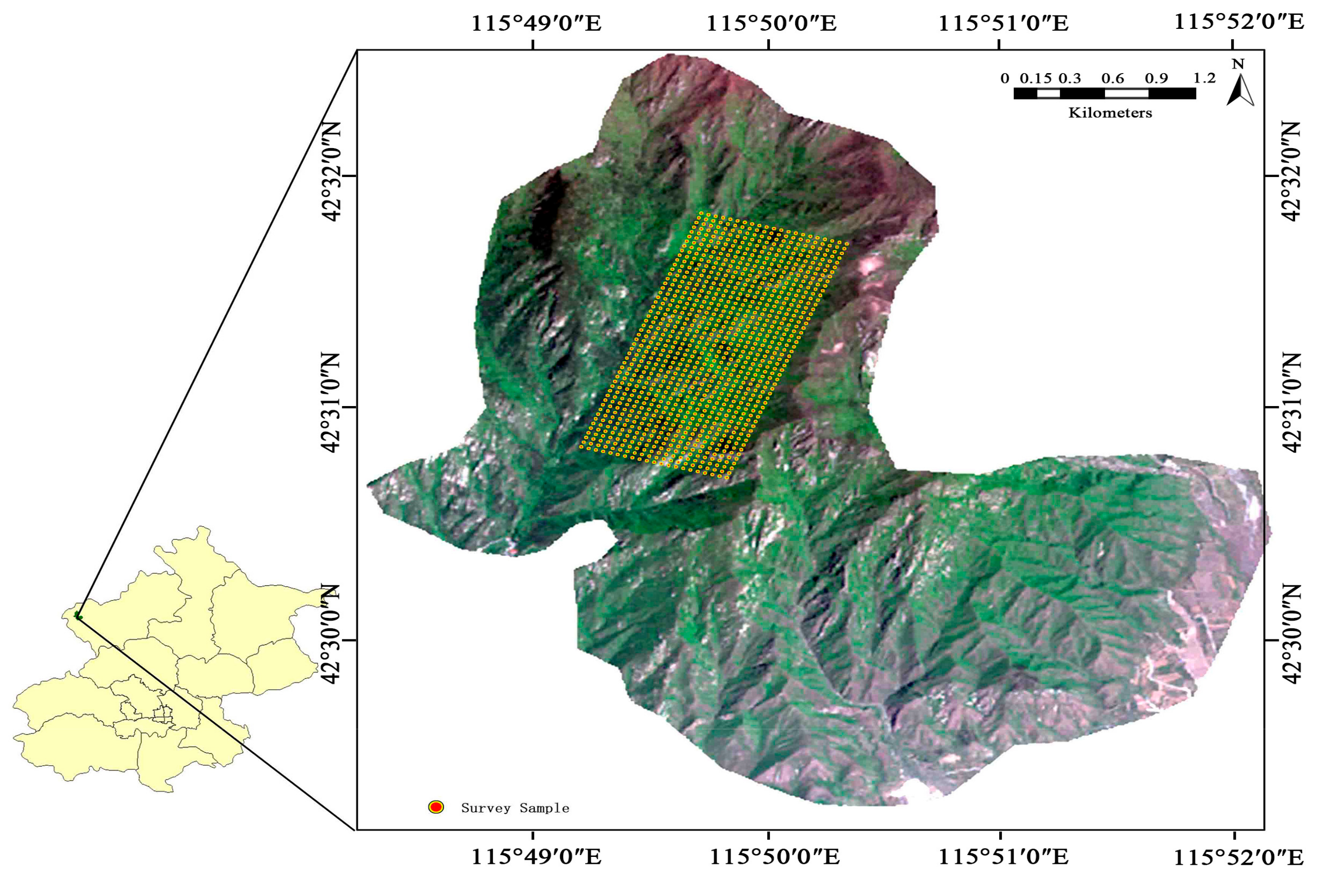
2.1. The Profile of the Study Sites
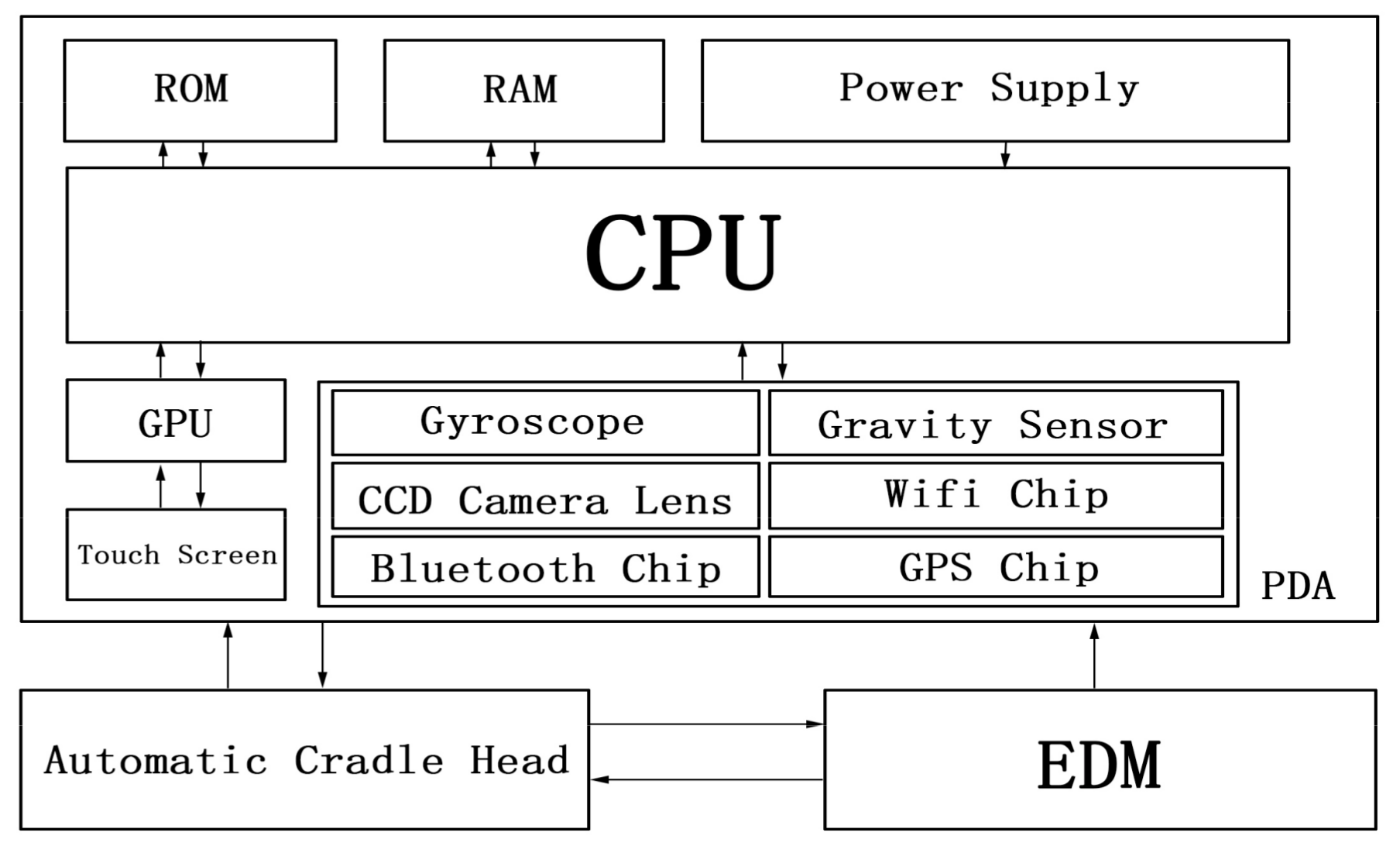
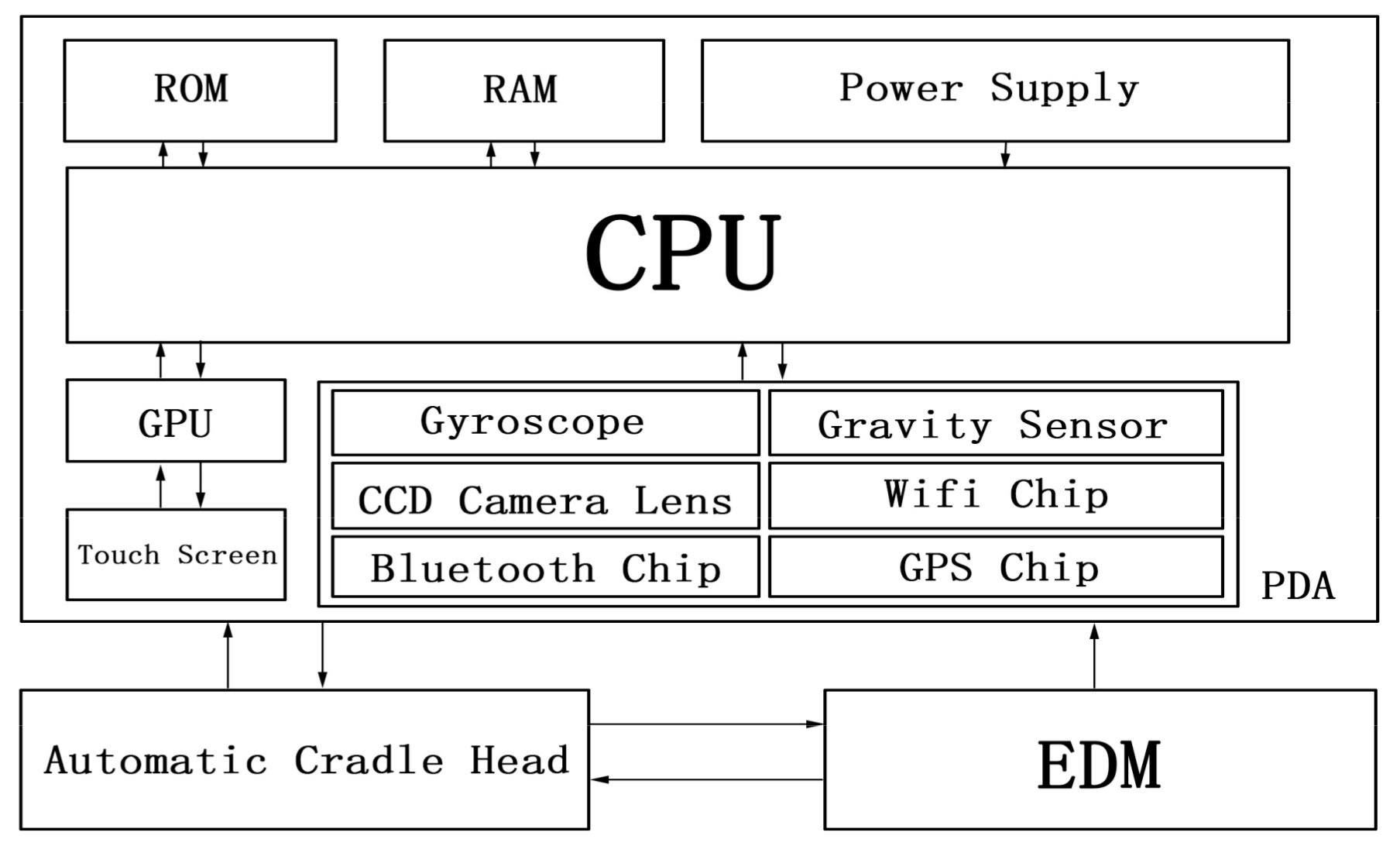
2.2. Development of the PDA Photogrammetry-Based Dendrometer
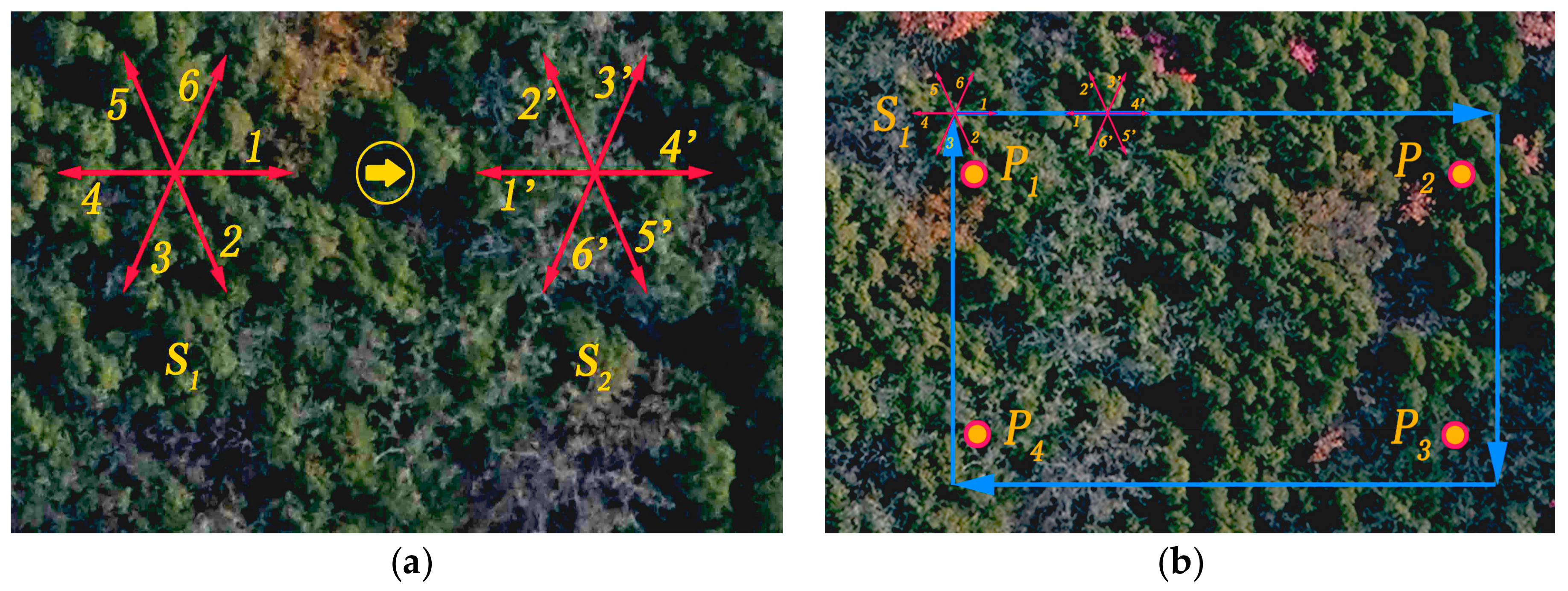
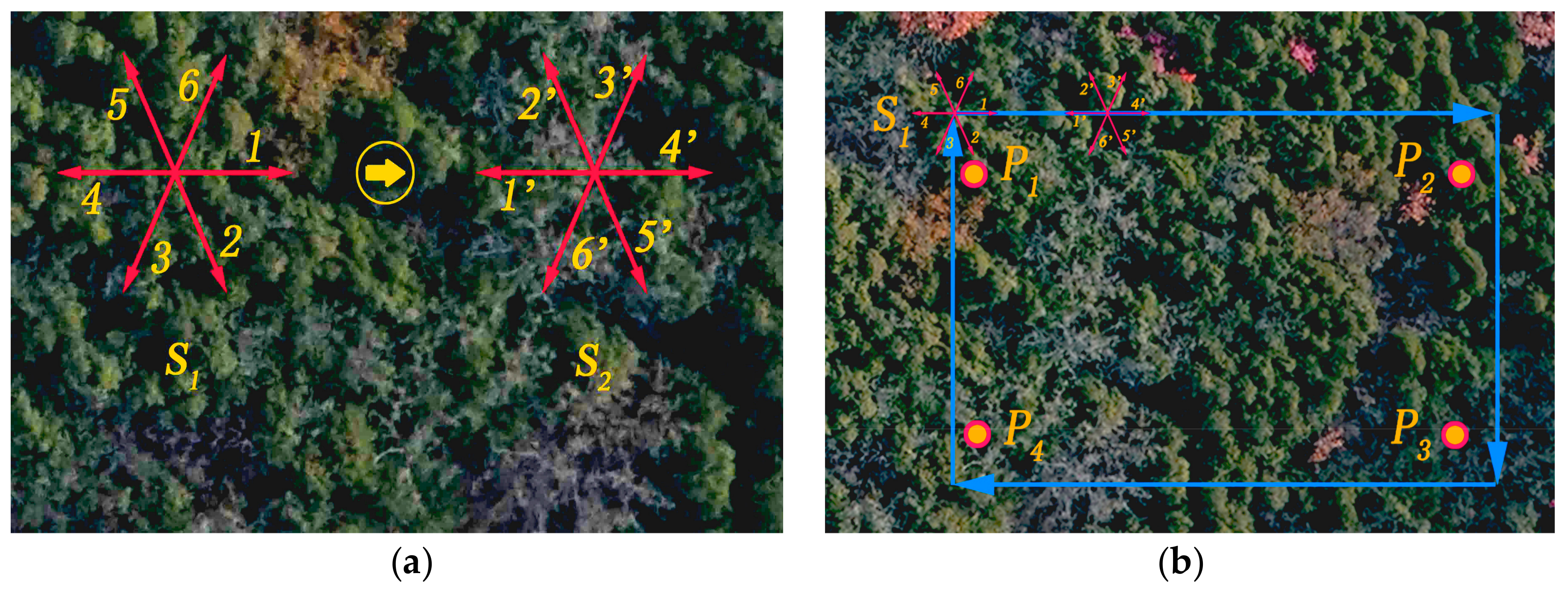
2.3. Continuous Terrestrial Photogrammetry in Stand Plots
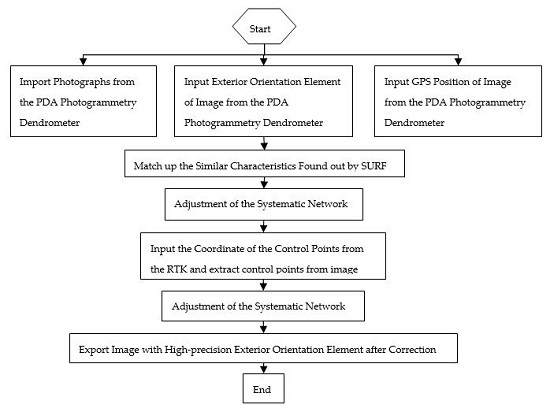
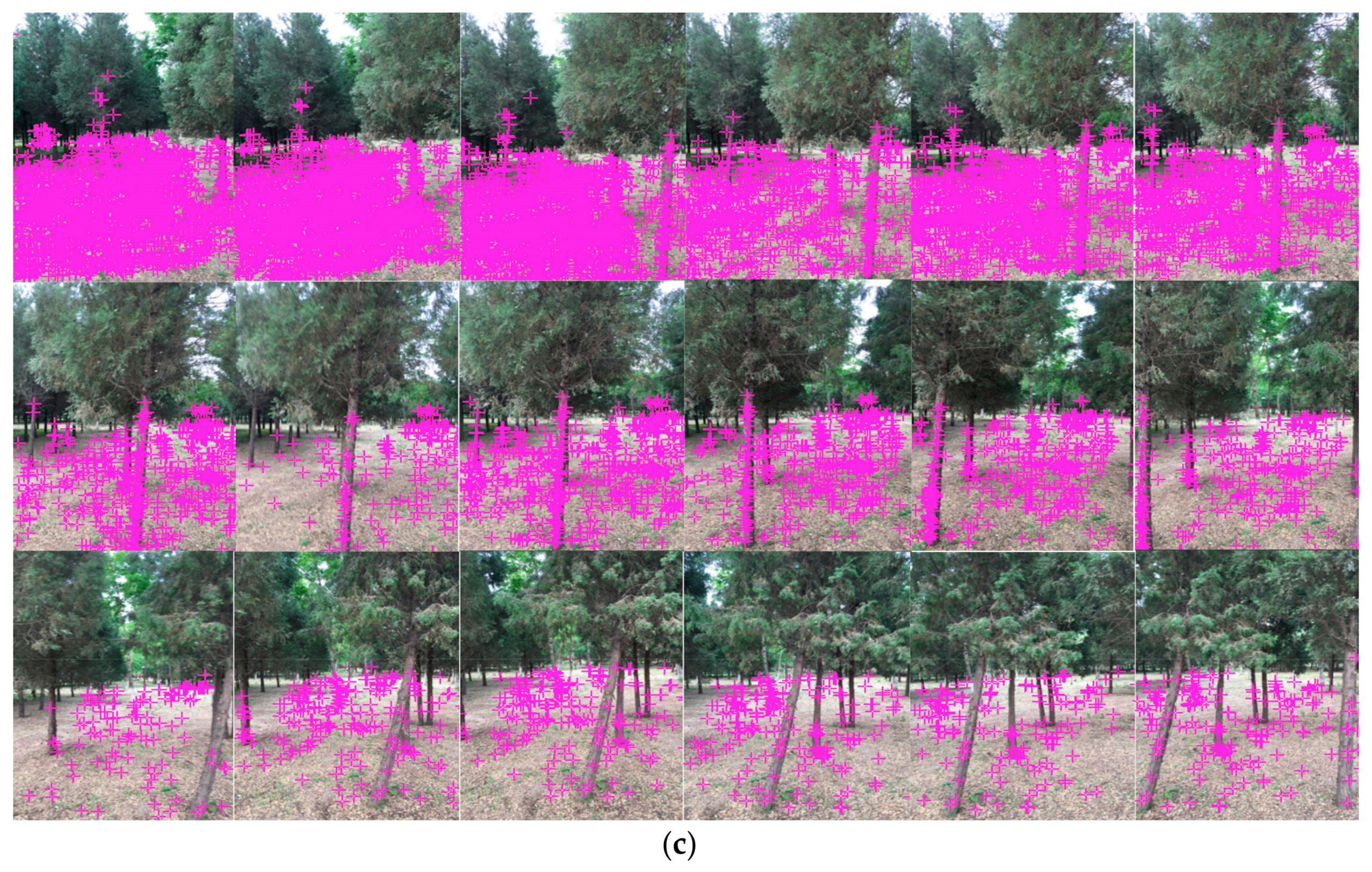
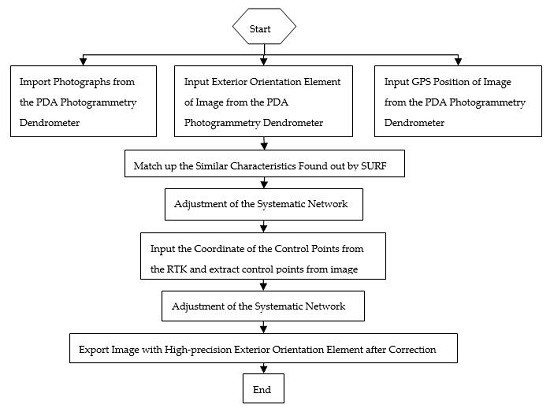
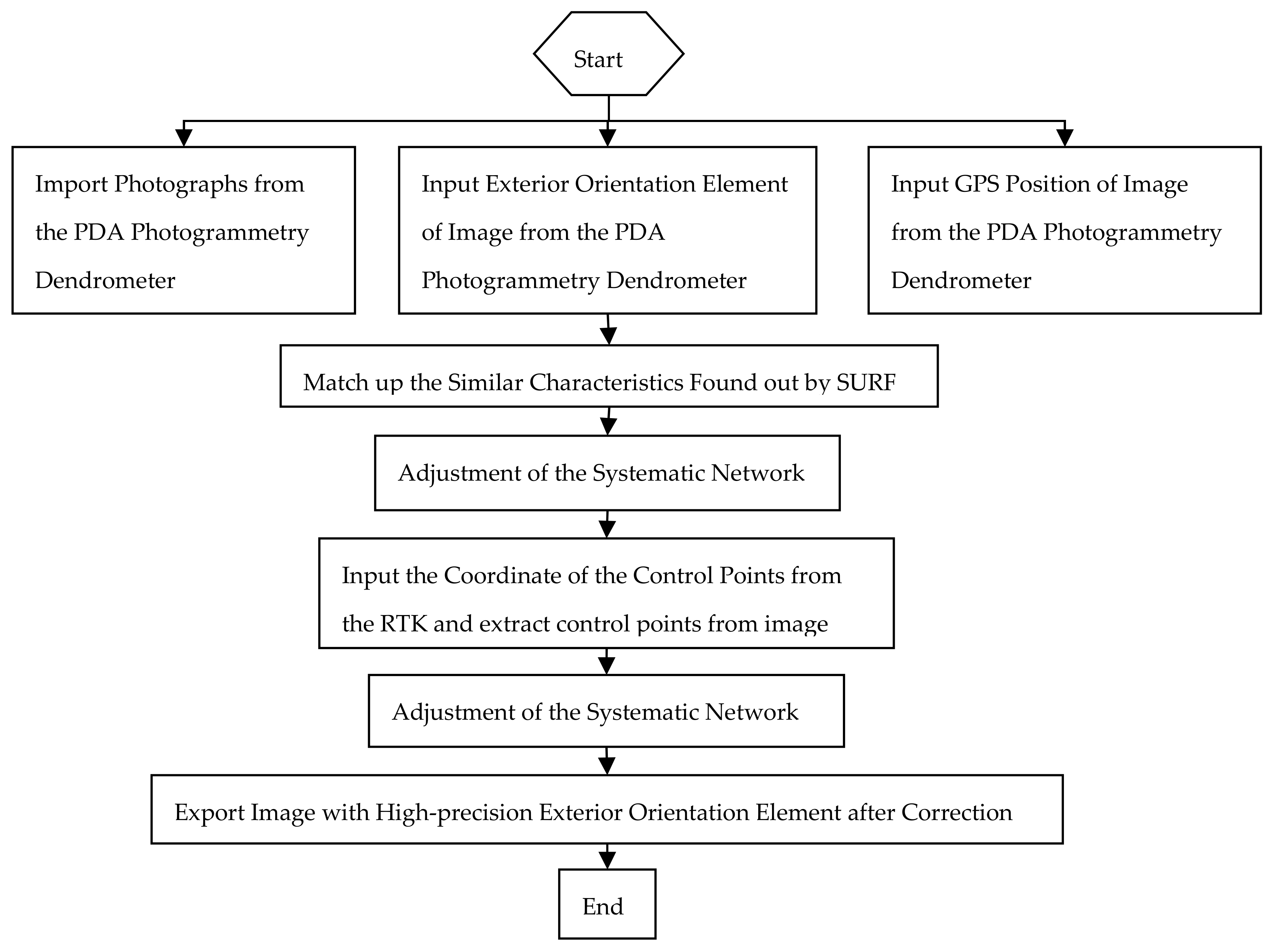
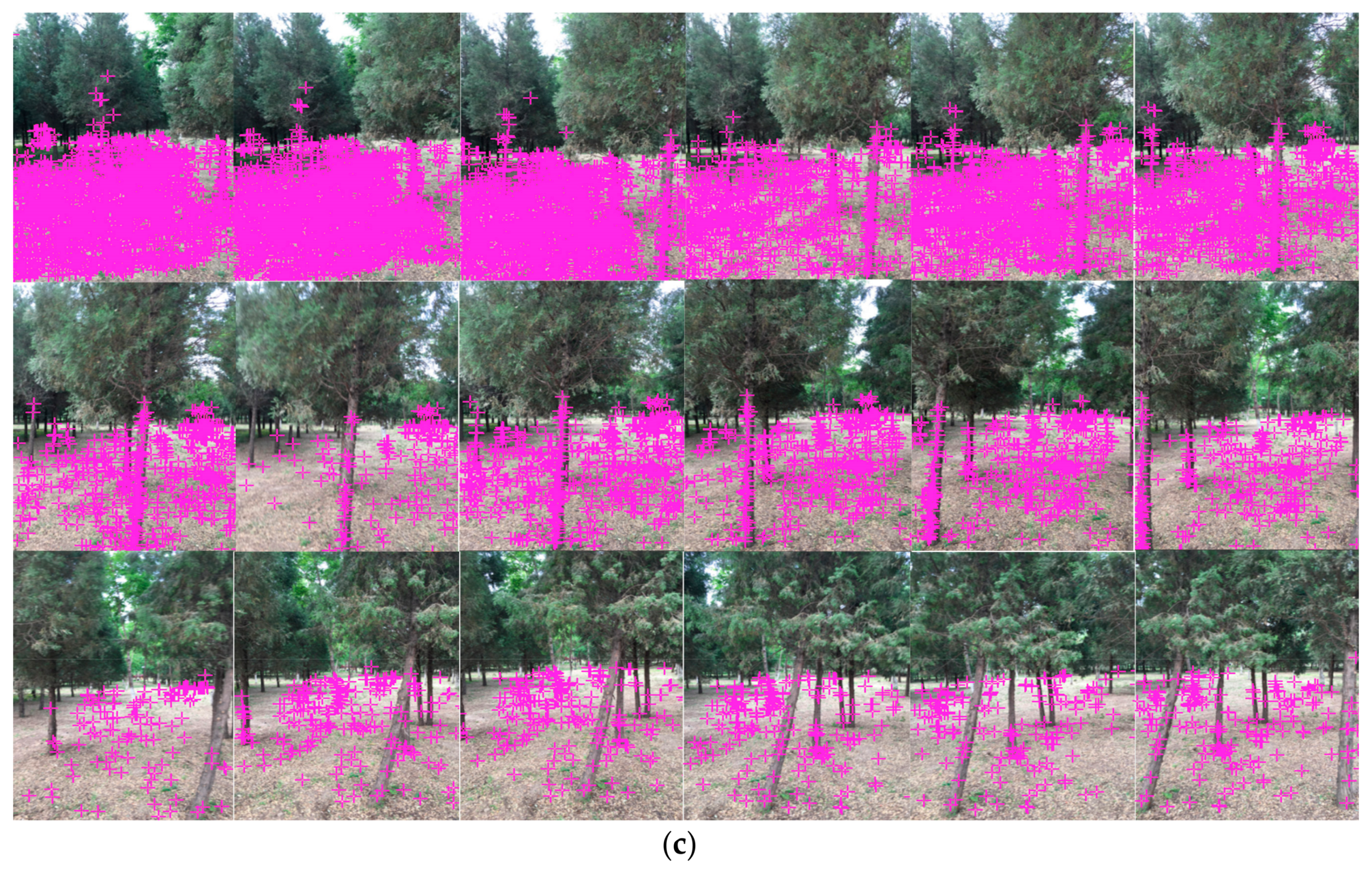
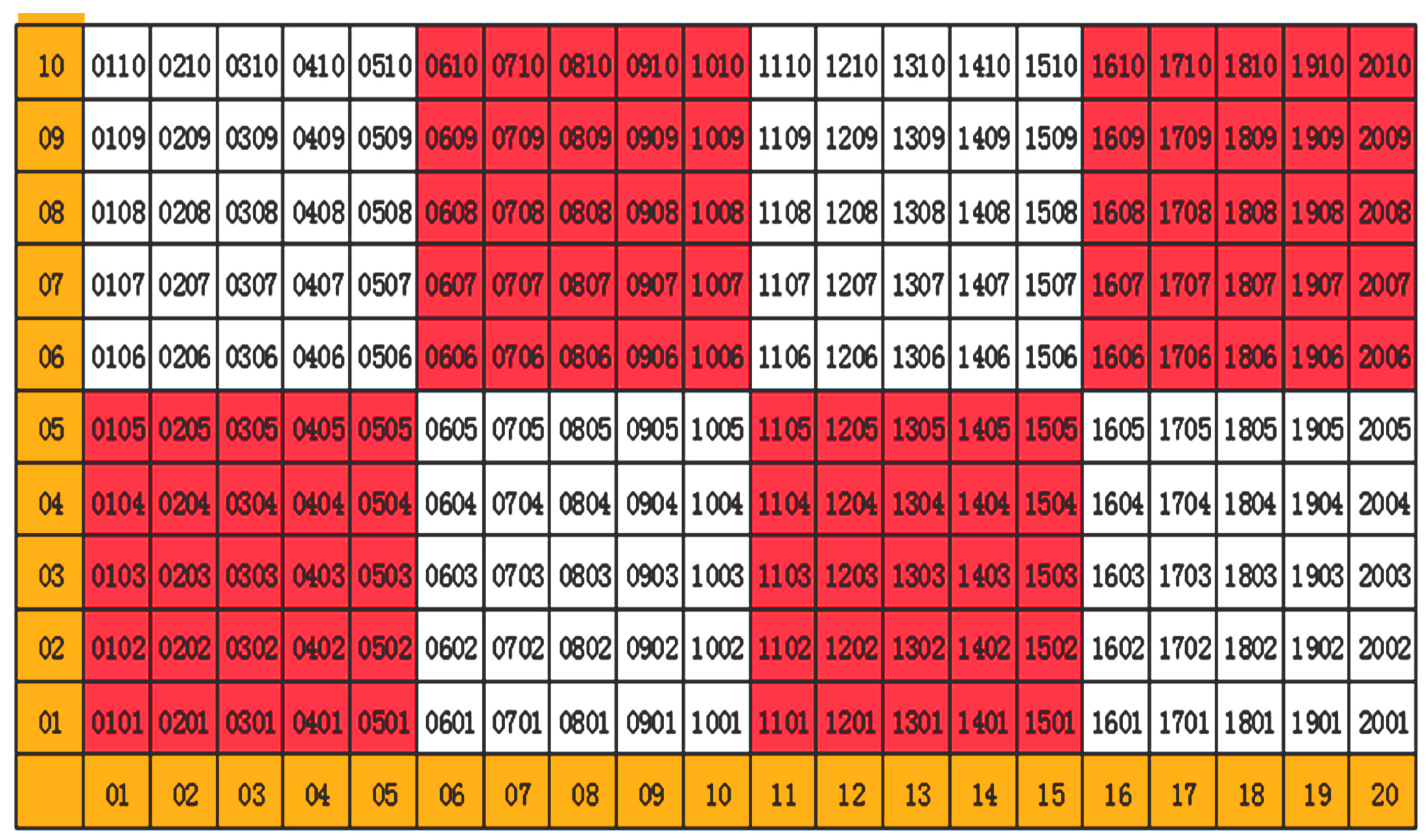
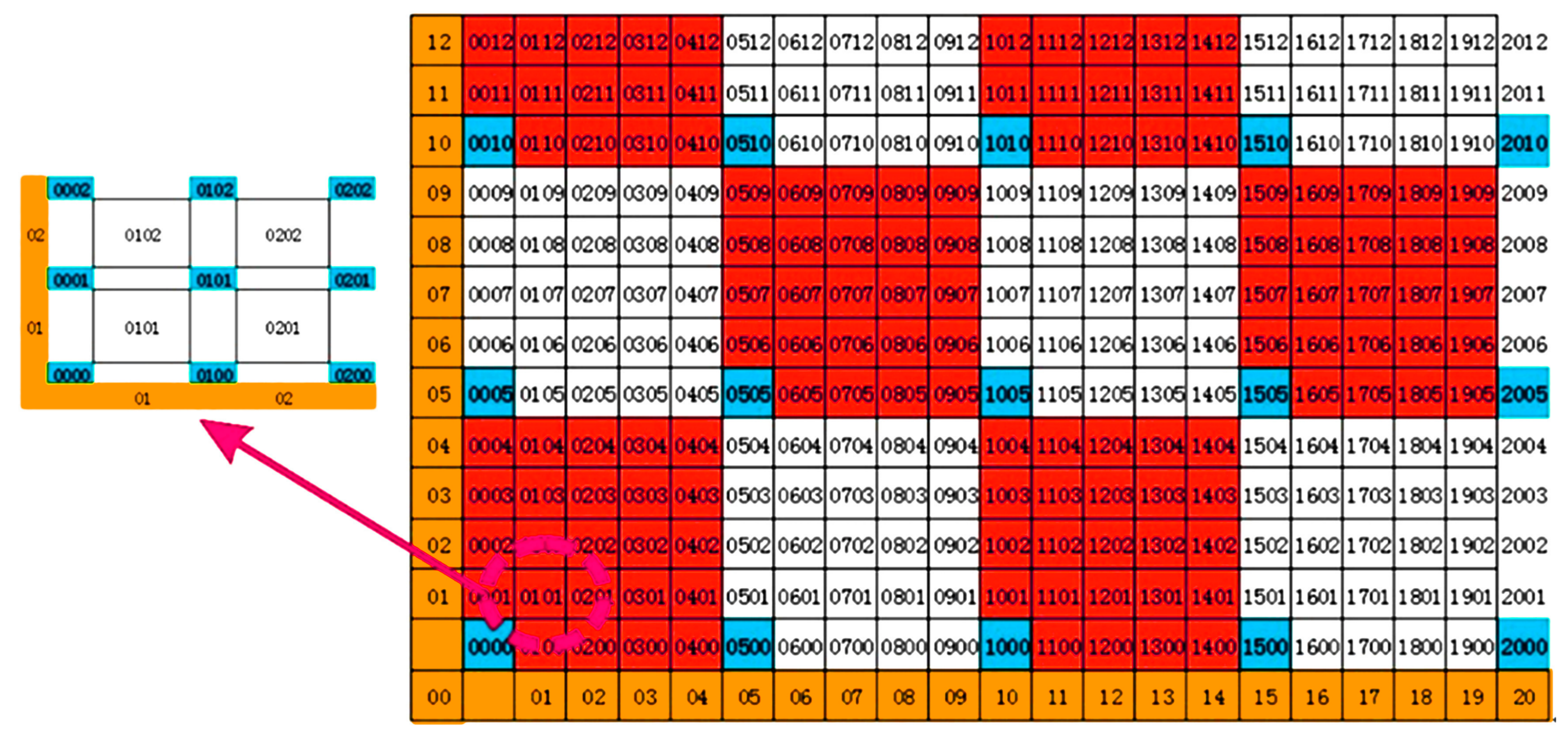
2.3.1. Adjustment Algorithm for Image Correction
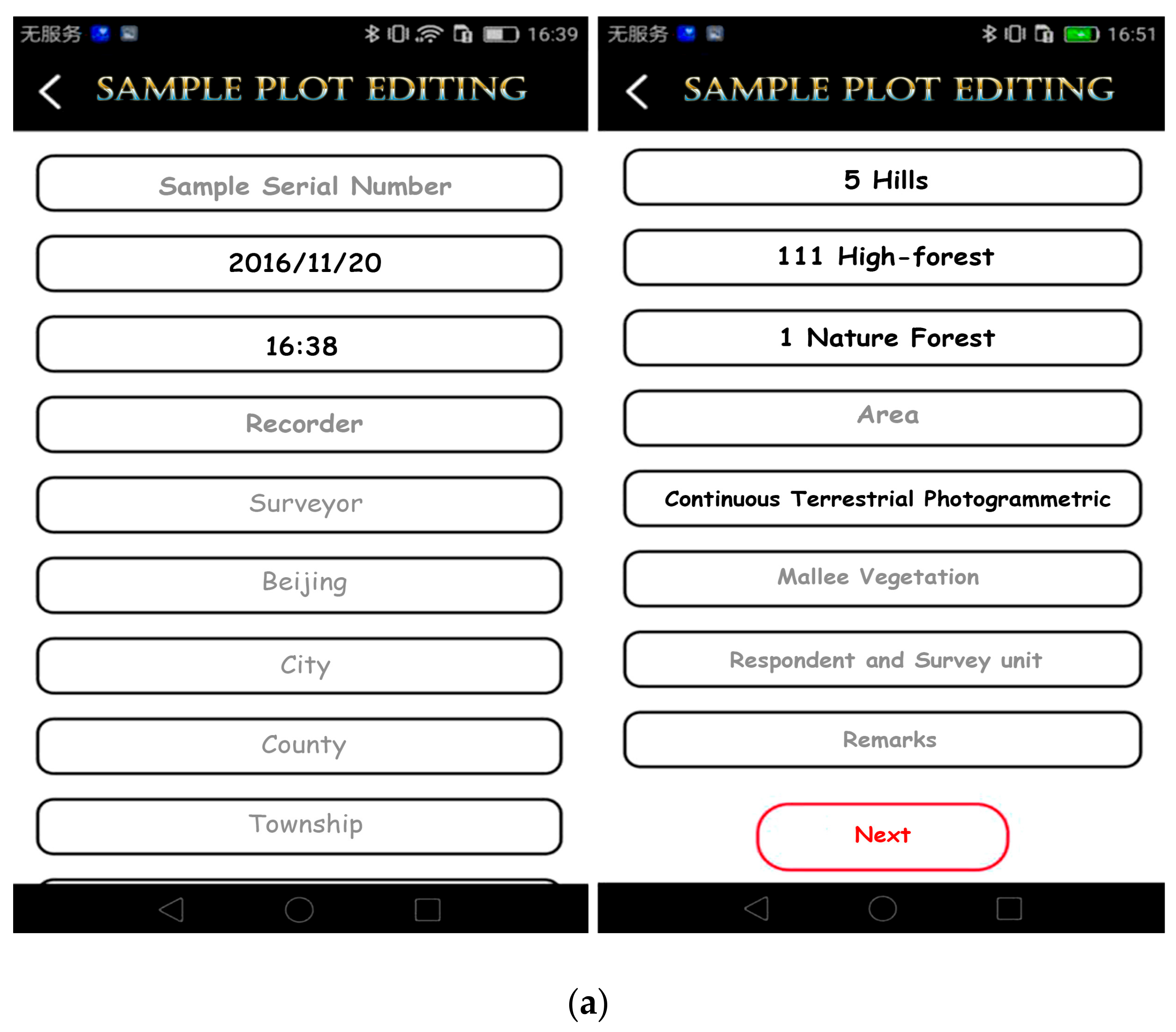
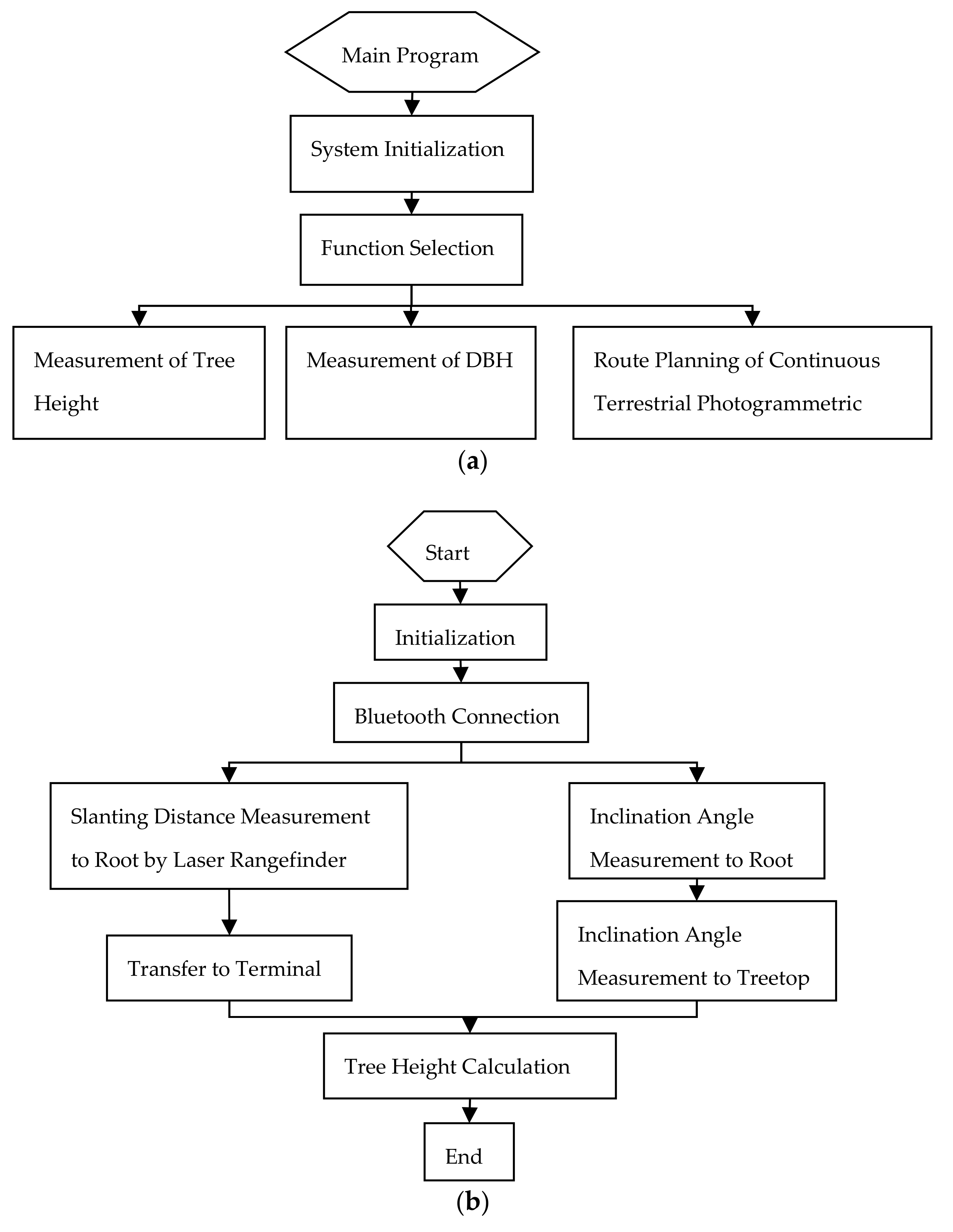
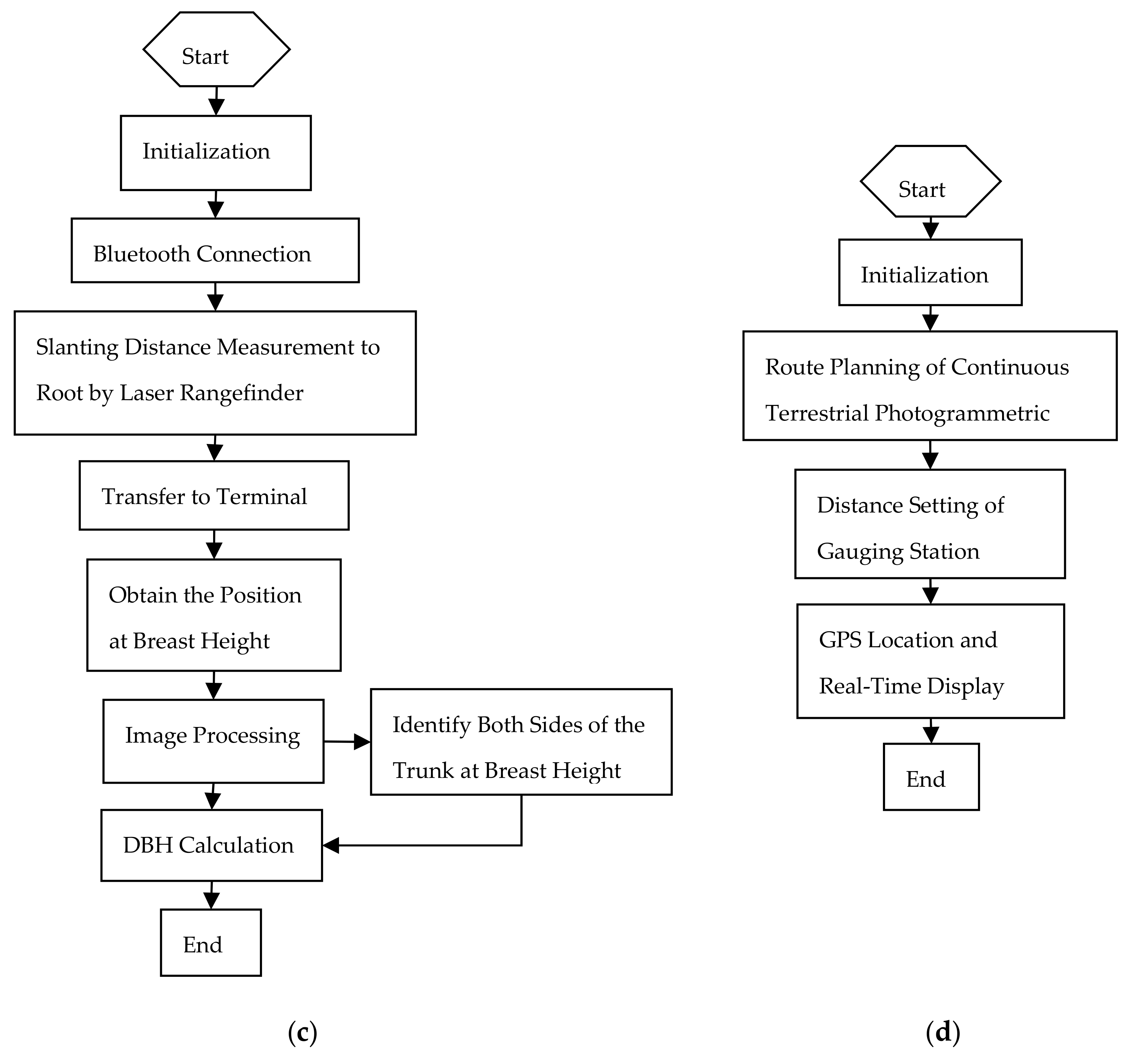
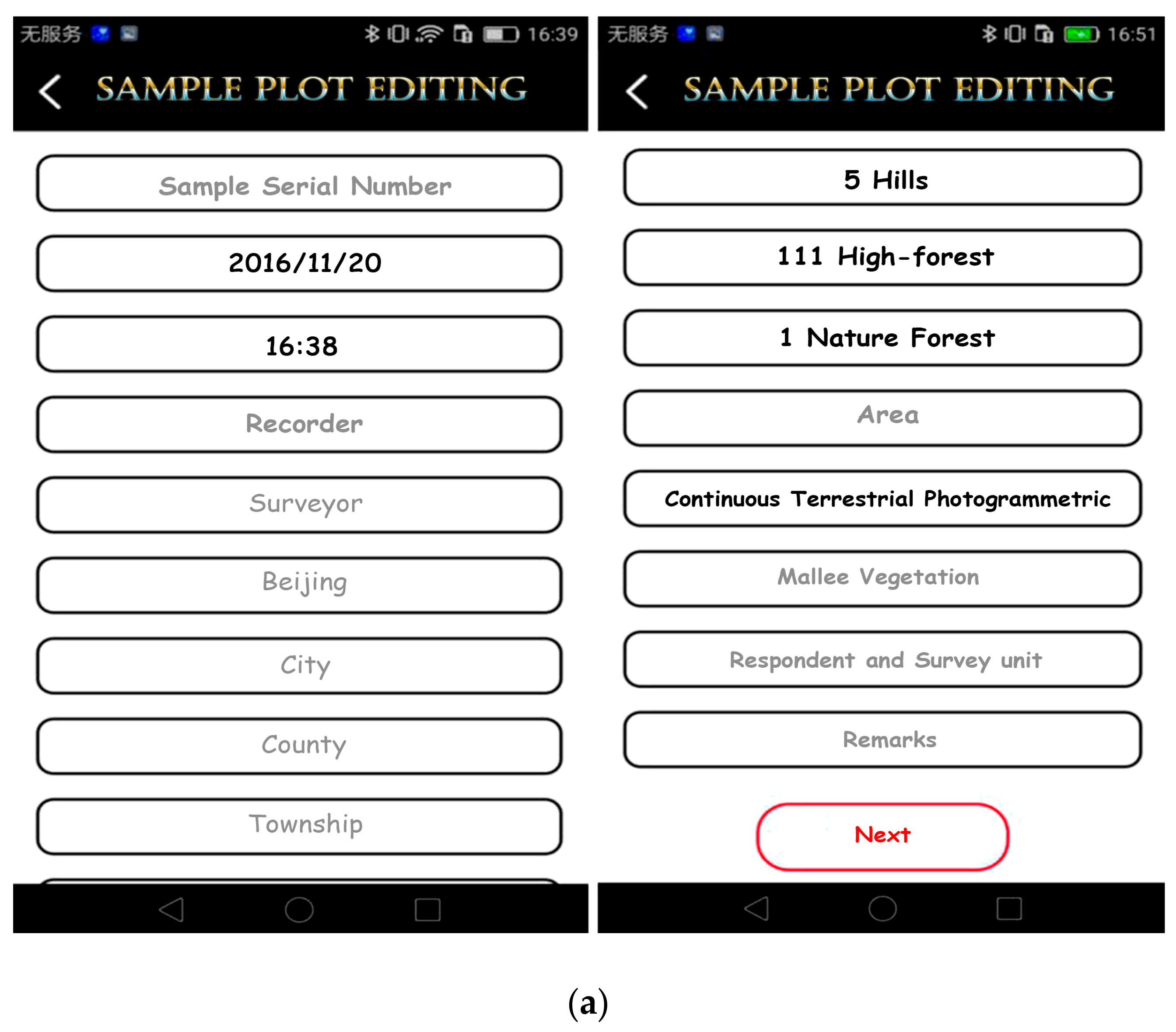
2.3.2. Development of Forest Sample Plot Continuous Photogrammetry Software
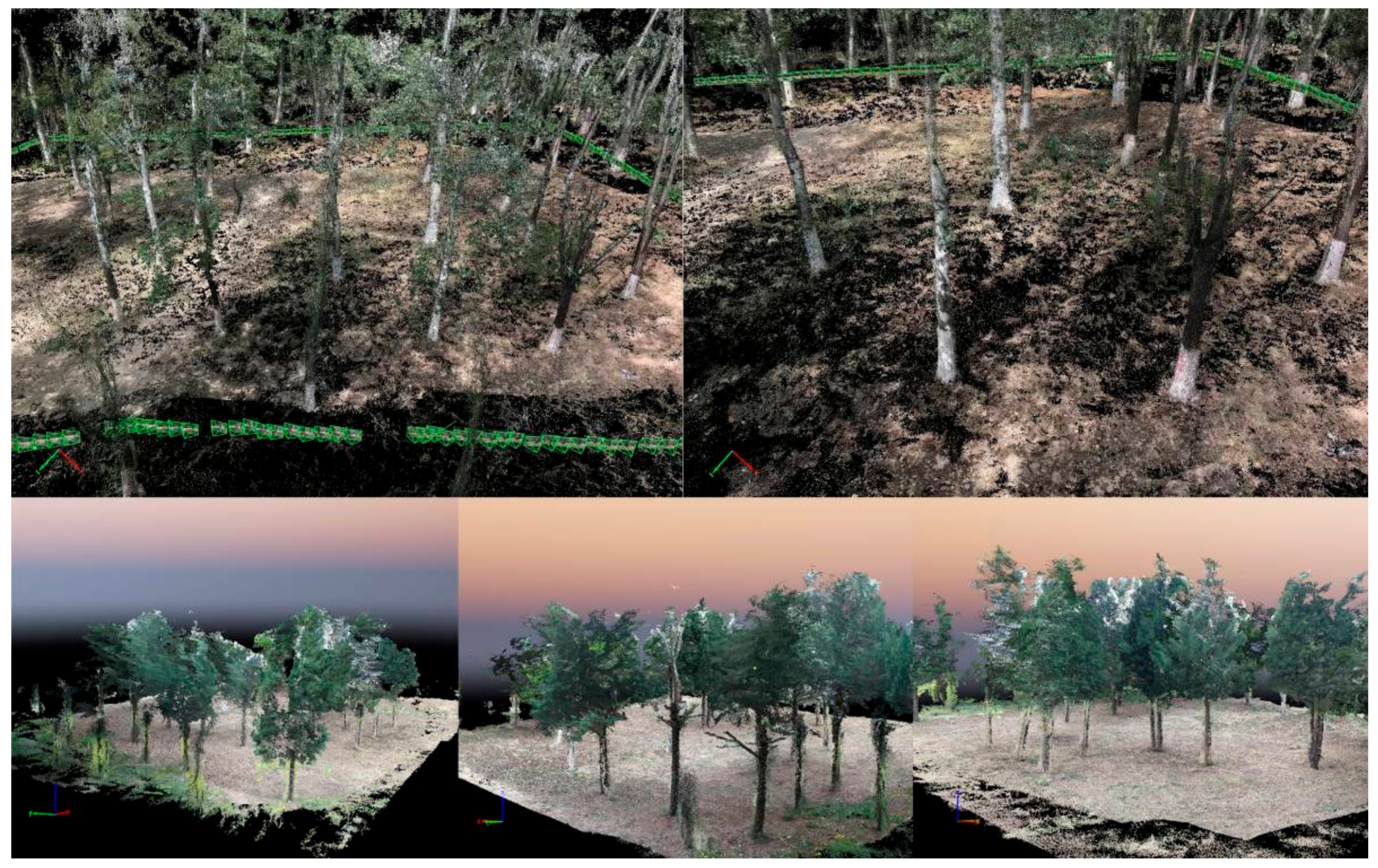
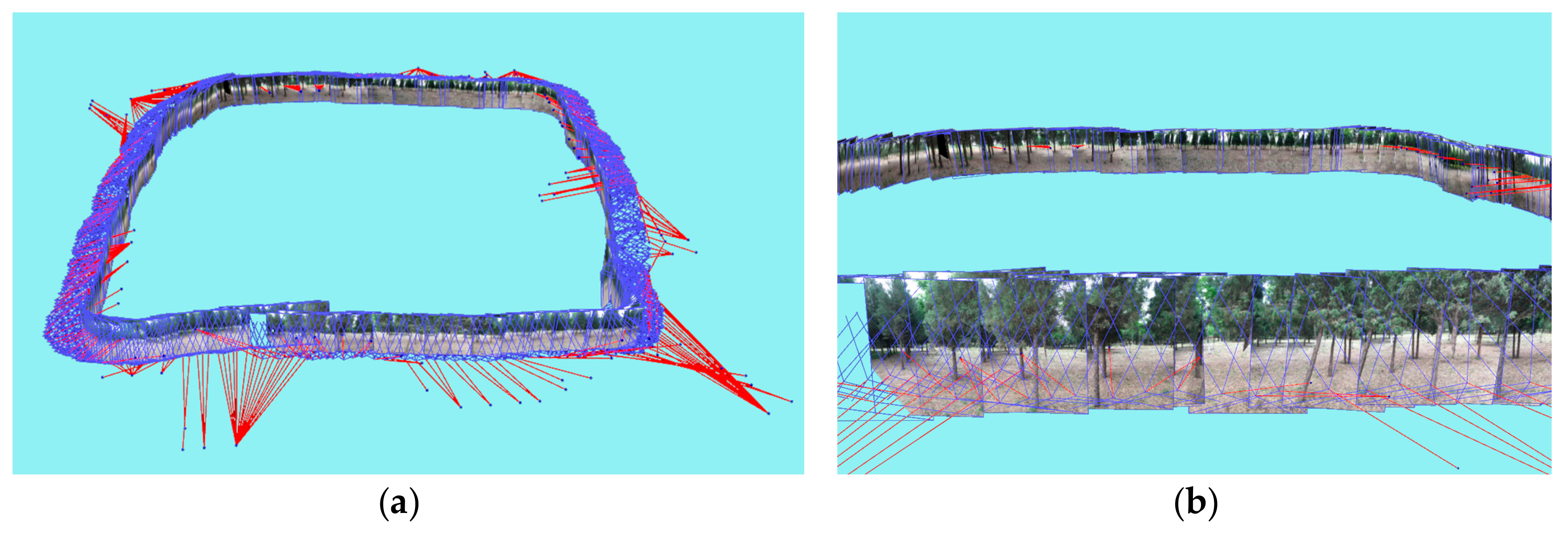
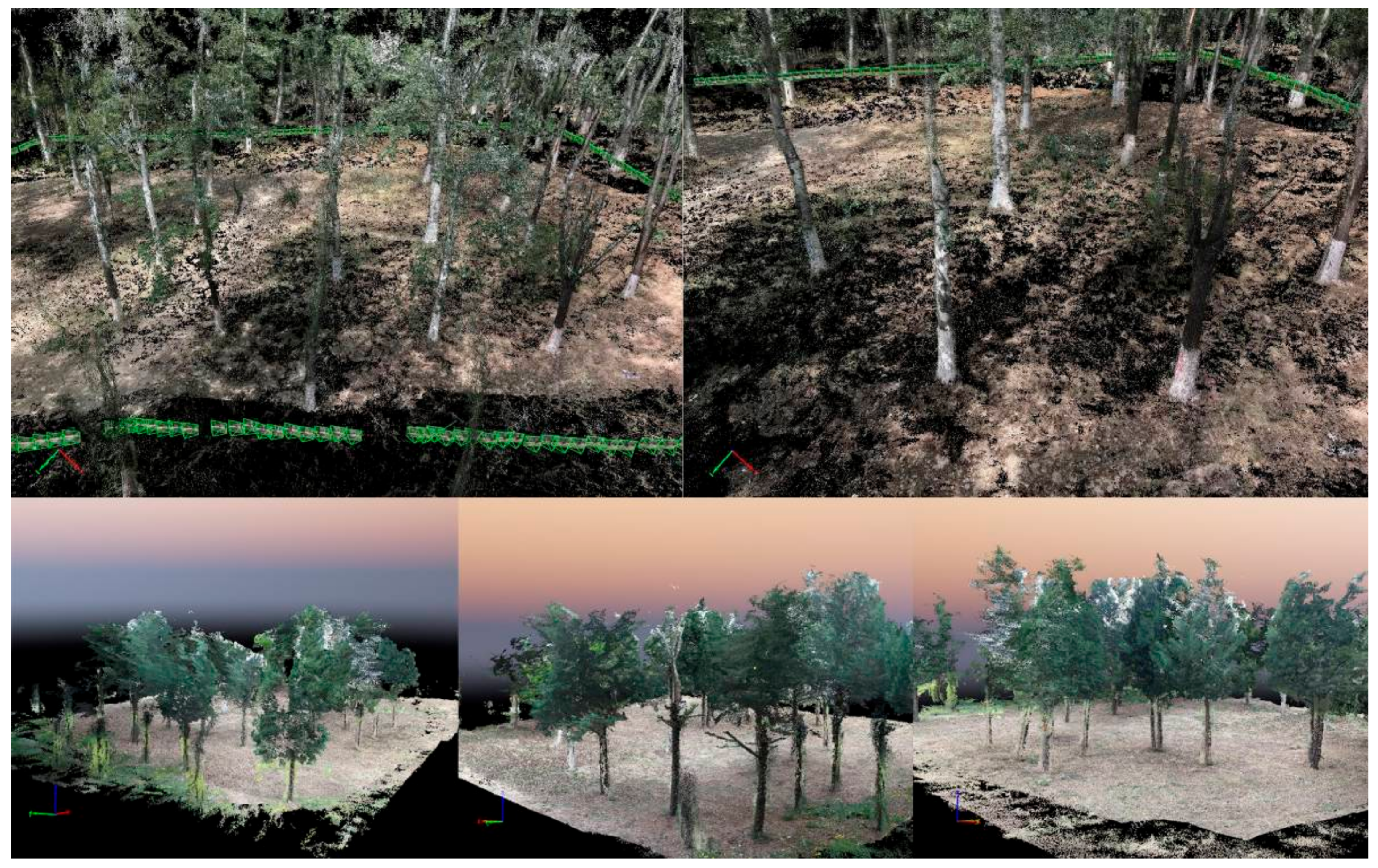
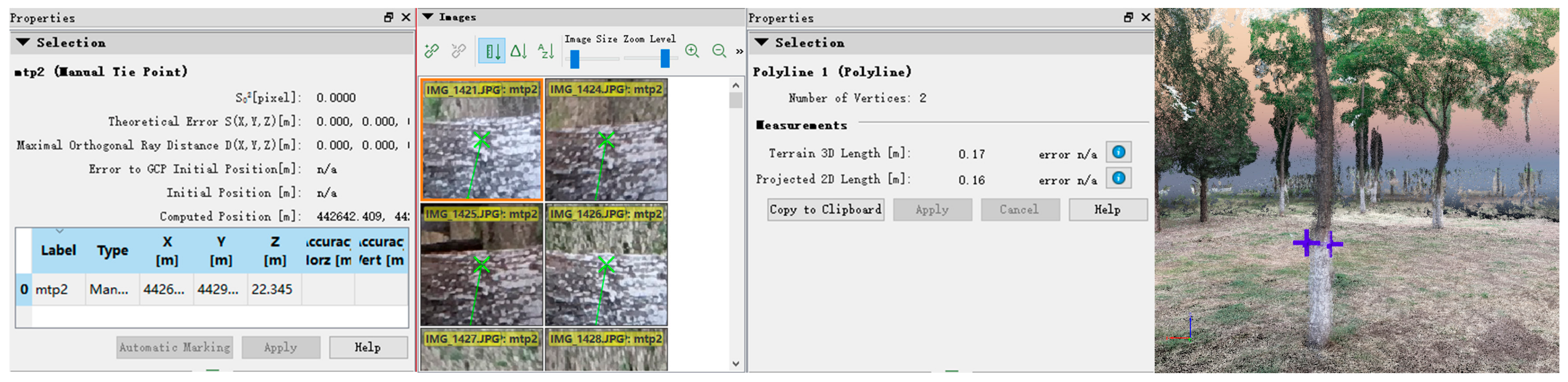
2.3.3. 3D Point Cloud Modeling and Measuring of Stand Plot
2.4. Additional Surveying of Individual Trees’ Height and DBH
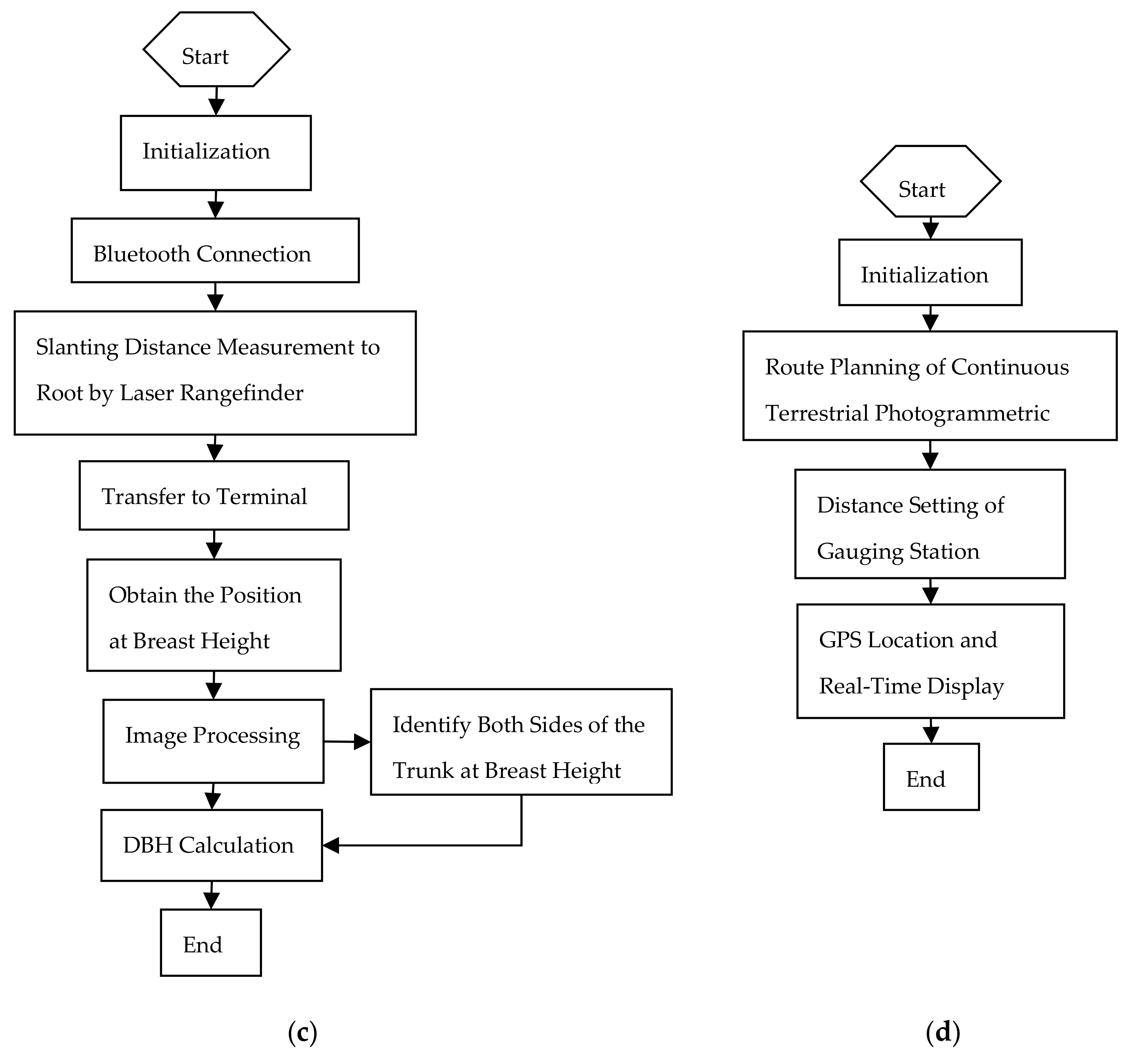
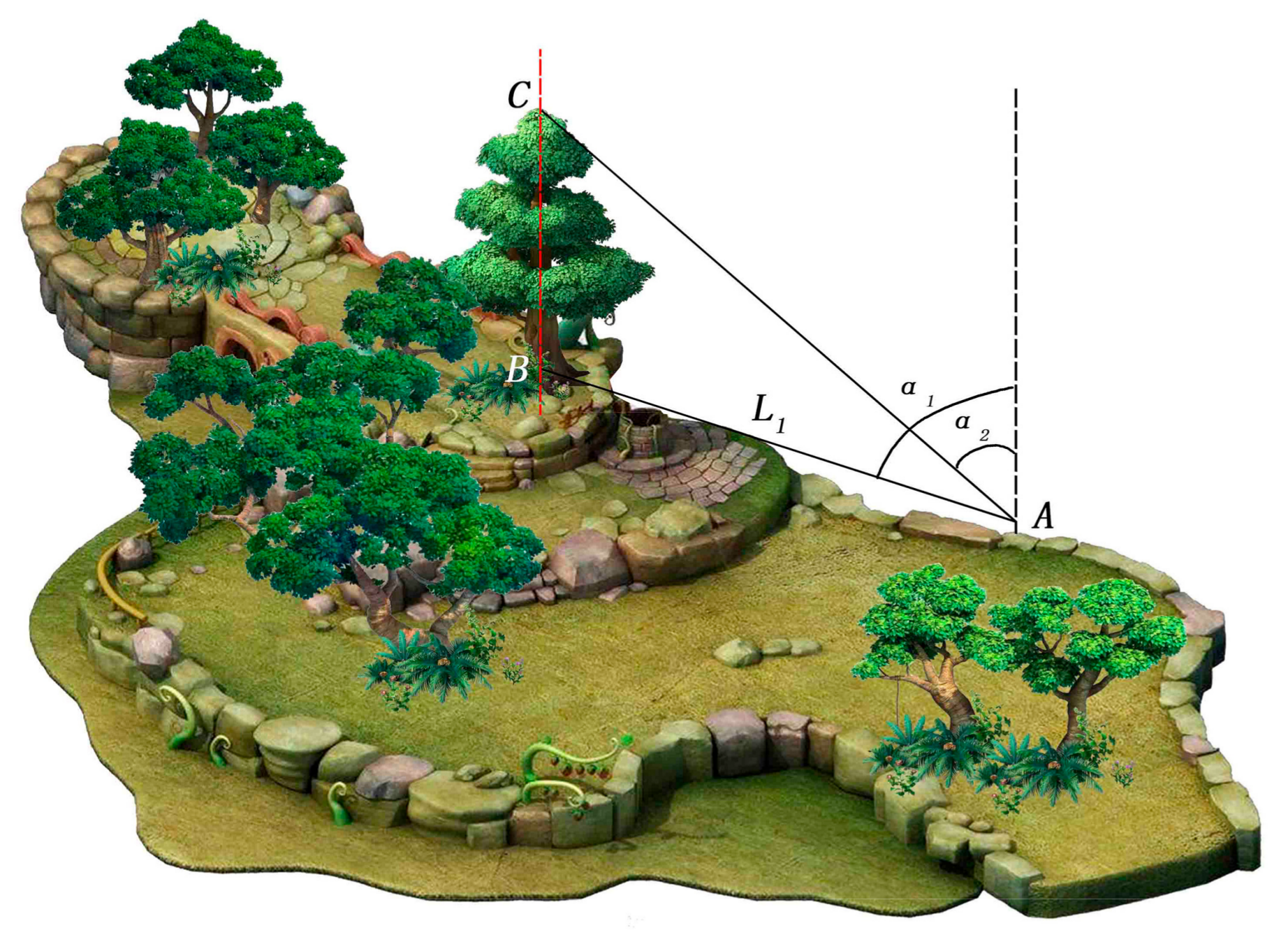
2.4.1. Analytic Algorithm for remote TREE Measurement
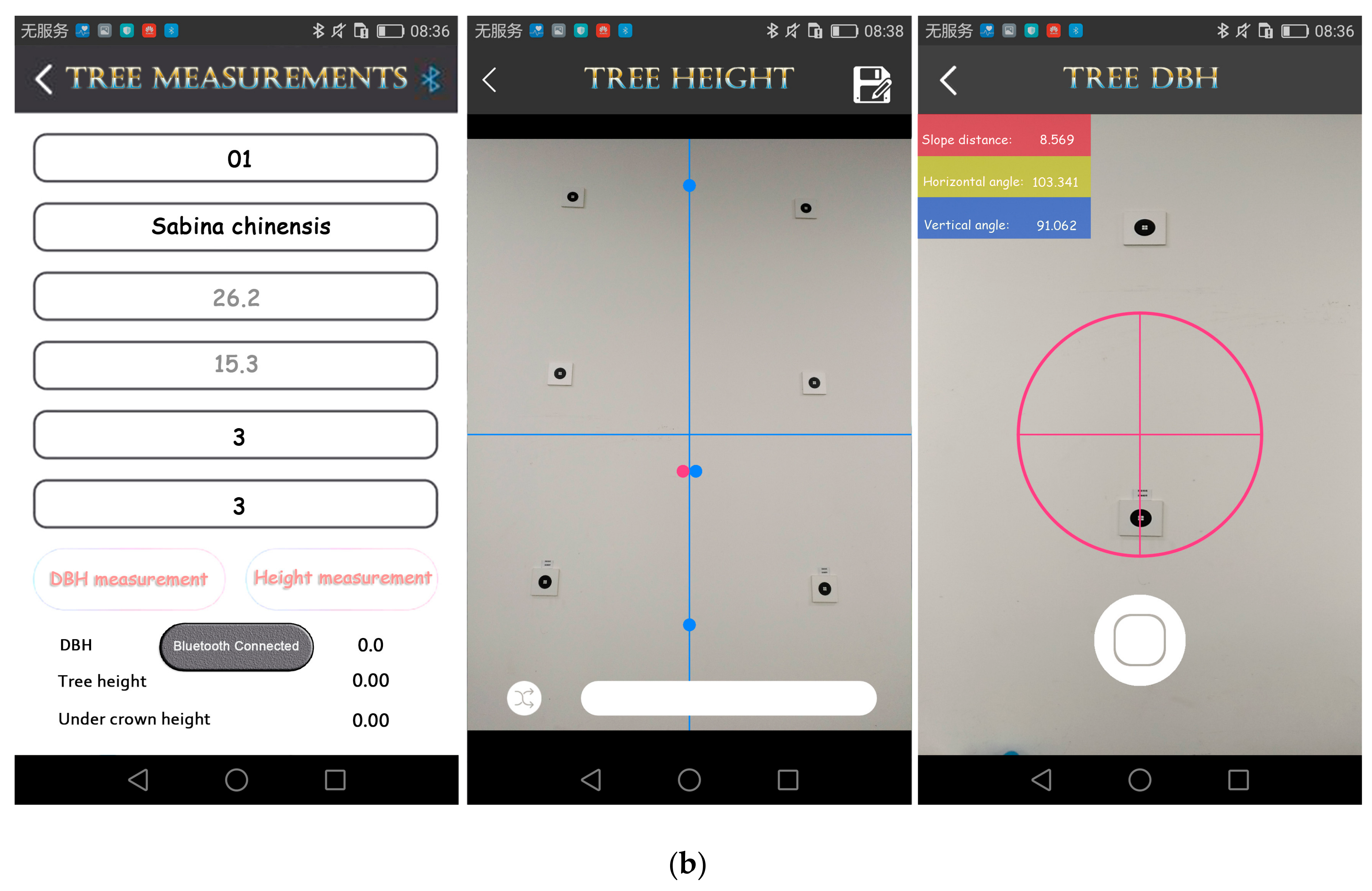
2.4.2. Development of Remote Tree Measurement Software
3. Results and Discussion
3.1. Pre-Experiment Preparation
3.2. Experimental Analysis of Continuous Photogrammetry in Stand Plots
- (1)
- The accelerometer in the PDA photogrammetry-based dendrometer is subject to dynamic errors, and gyroscopic drift will induce an orientation angle measurement error. In addition, the idiosyncrasies of the IMU will cause the navigation error to accumulate with time, which will have a negative impact on the navigation precision.
- (2)
- The PDA photogrammetry-based dendrometer’s GPS unit may encounter an unstable or interrupted satellite signal when in a moving vehicle, which will affect the positioning precision.
- (3)
- The stand plot continuous photogrammetric measurement system consists of an integrated PDA photogrammetry-based dendrometer accelerometer, gyroscope, IMU, and GPS. The system integration process and data processing will inevitably generate errors, and the fact that photogrammetry is influenced by the external environment will lead to eccentricity errors, time synchronization errors, and iteration errors in the data processing.
- (4)
- Although the PDA photogrammetry-based dendrometer’s internal orientation elements are assessed and tested, the internal orientation elements will vary slightly in a cyclic fashion with increasing time. Due to the differences between the field survey environments and the laboratory testing environment, the fixed errors of the internal orientation elements will directly affect the positioning precision.
- (5)
- Errors in the integration of the system’s different technologies will lead to some eccentricity between the PDA photogrammetry-based dendrometer’s four independent systems: namely, the accelerometer, gyroscope, IMU, and GPS. Angular eccentricity and eccentric components will exist in the three axial directions, and will directly impact the positioning precision; the angular eccentricity and eccentric components also must be corrected by a calibration facility, and the calibration facility’s fixed errors will further influence positioning results.
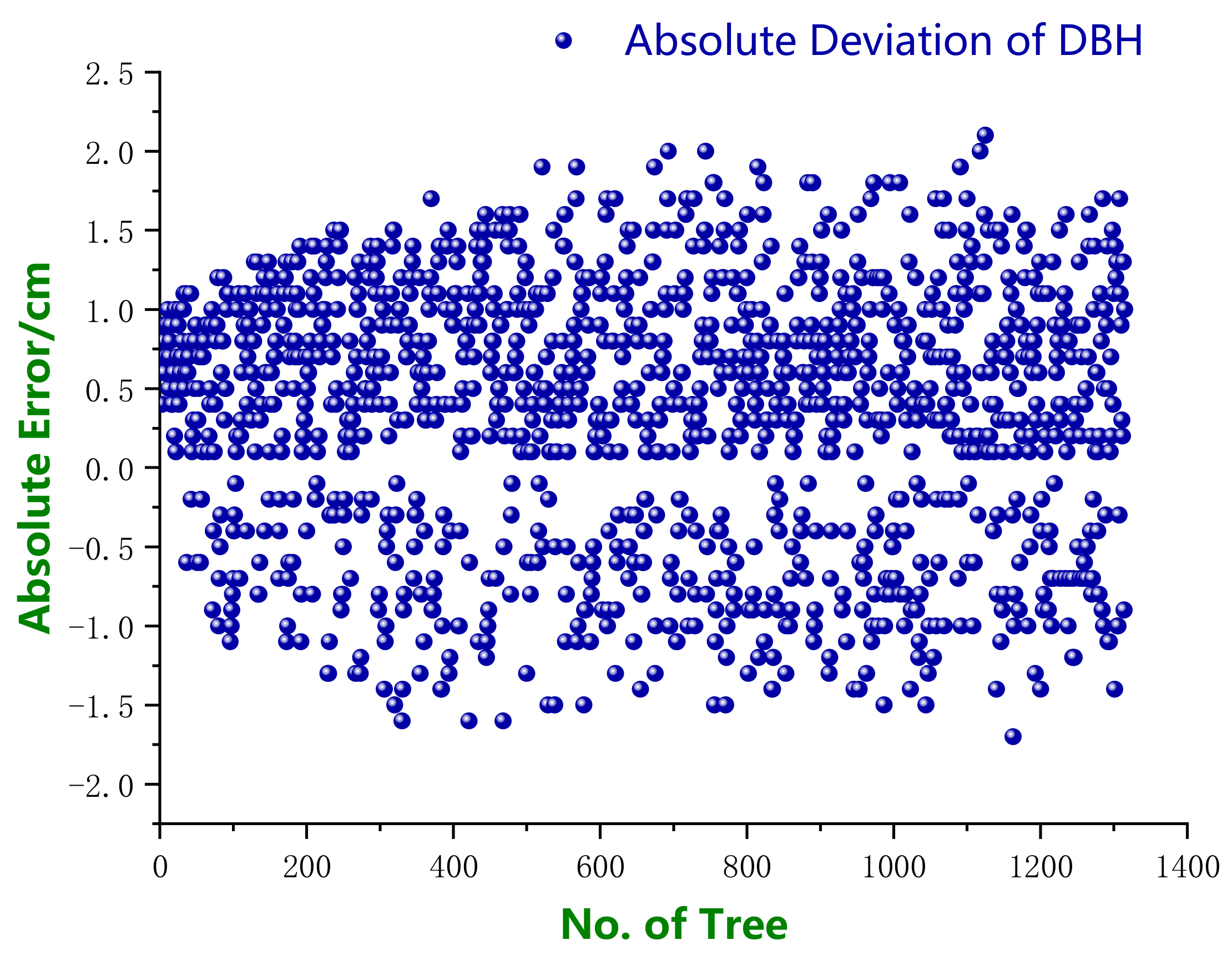
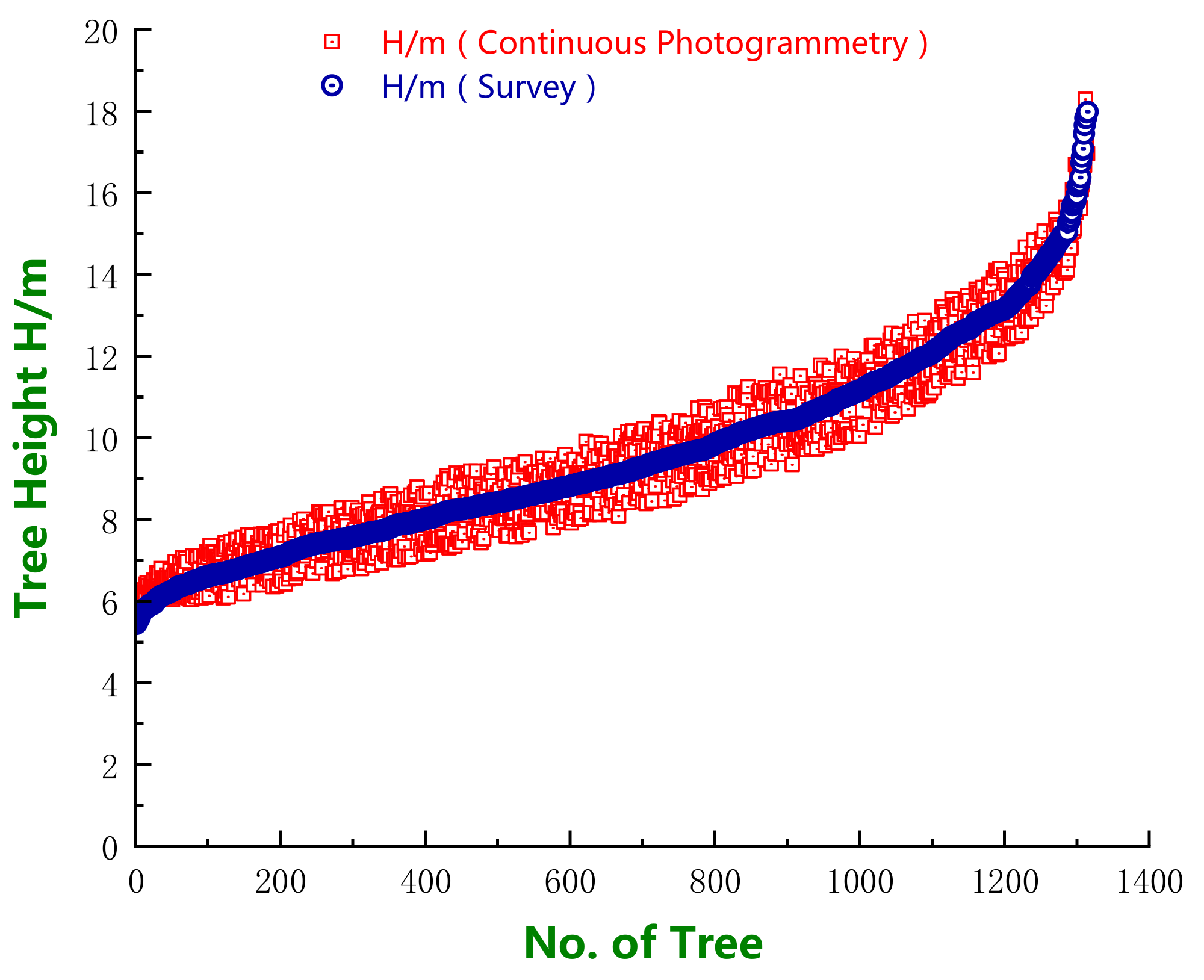
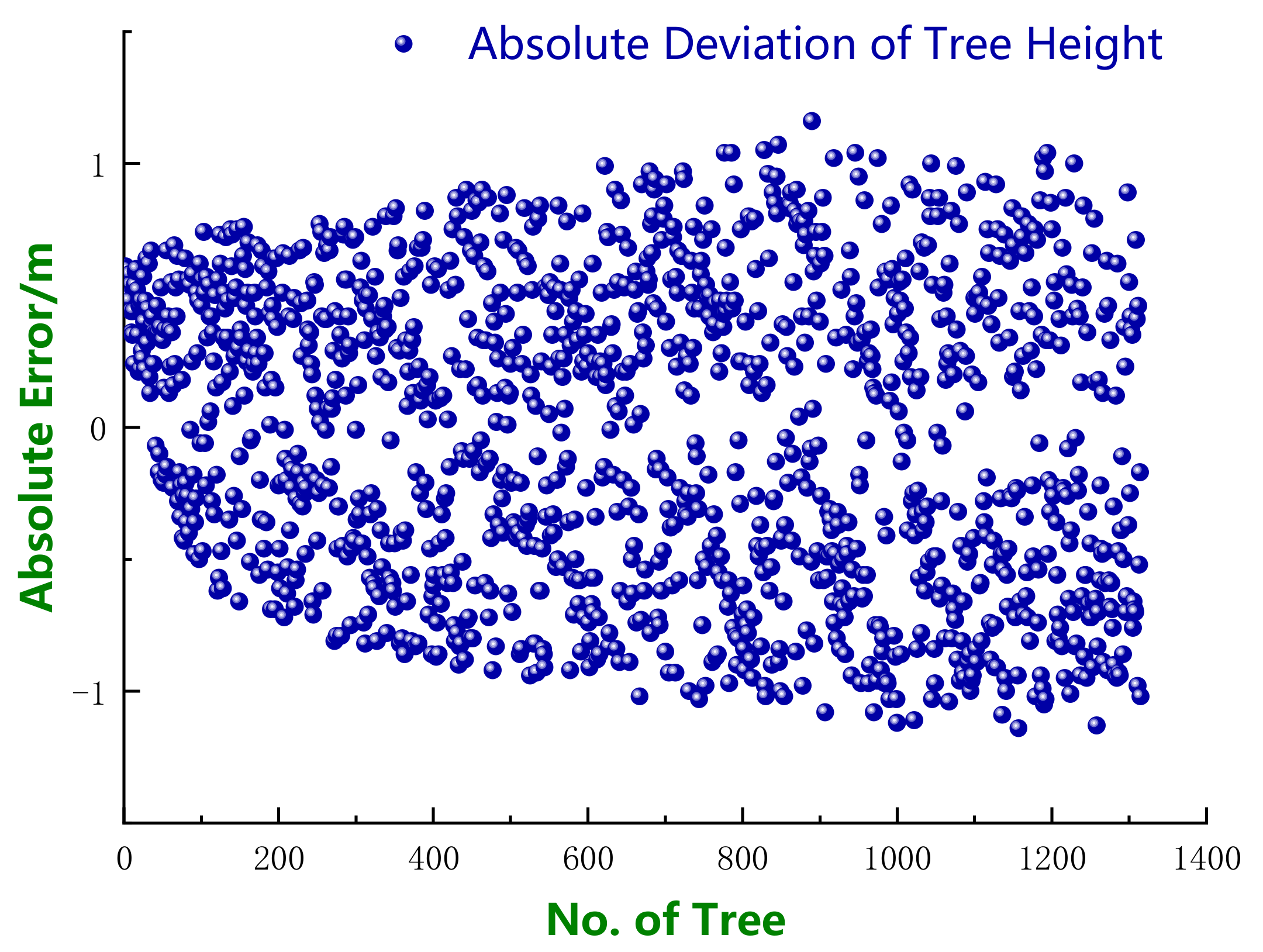
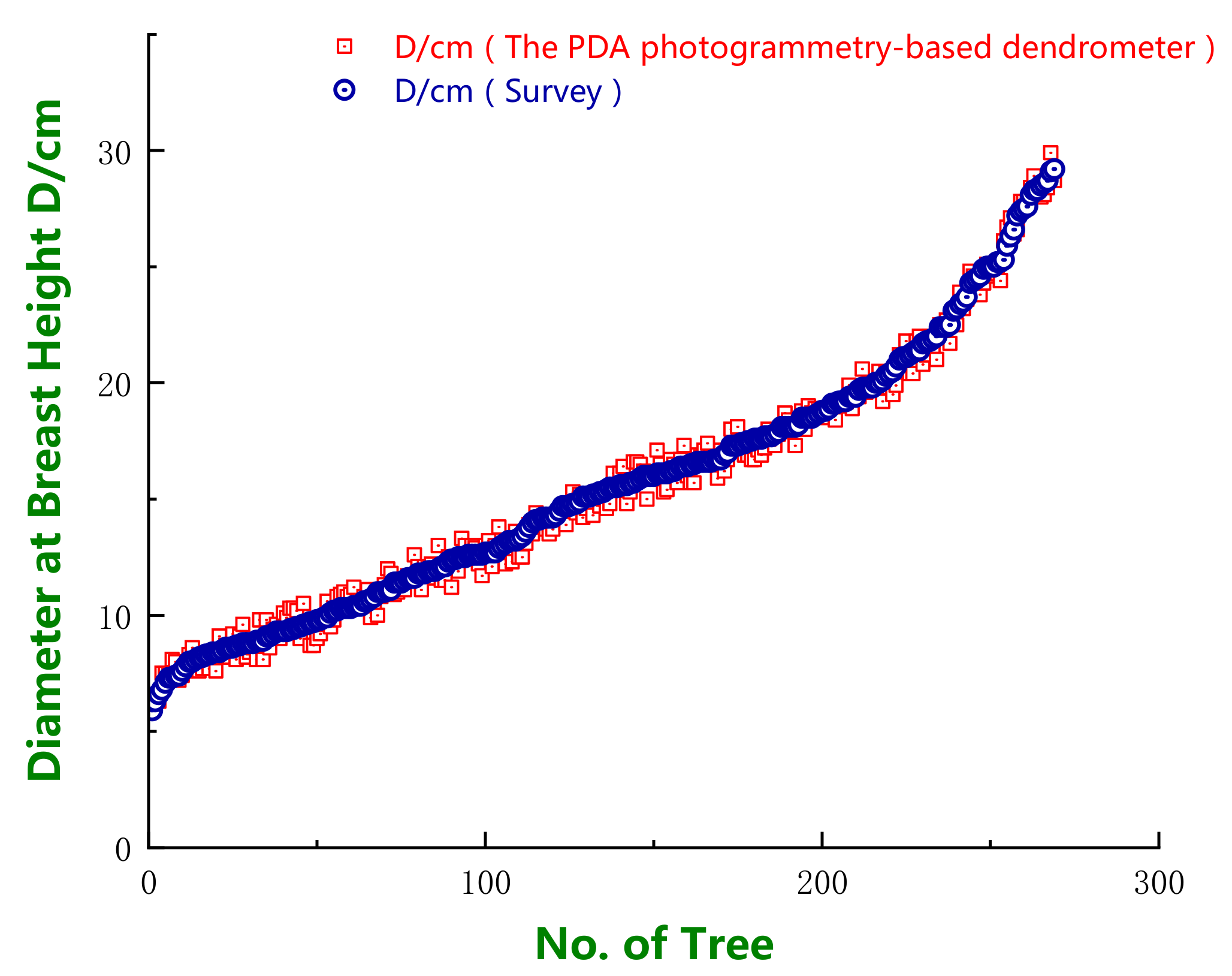
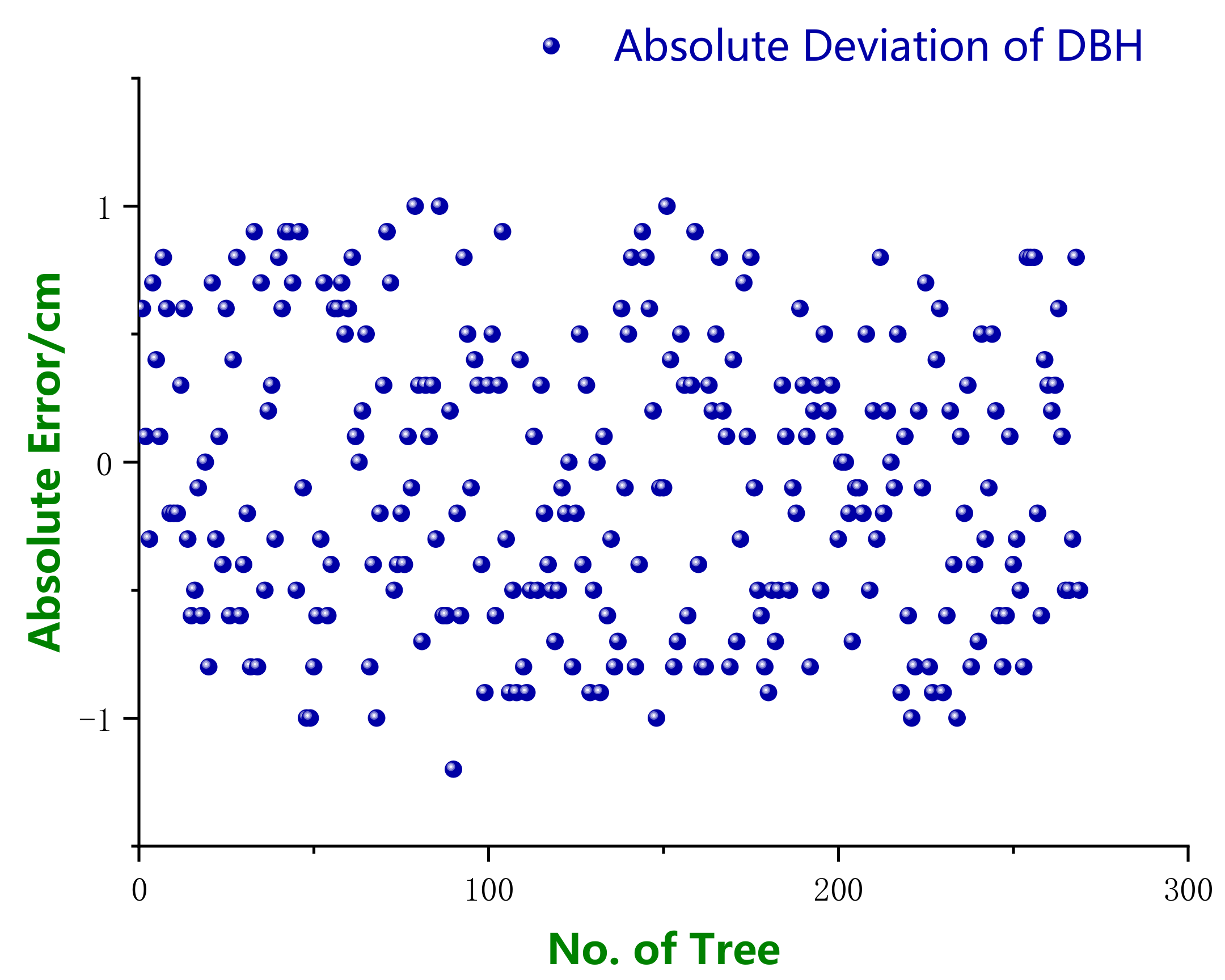
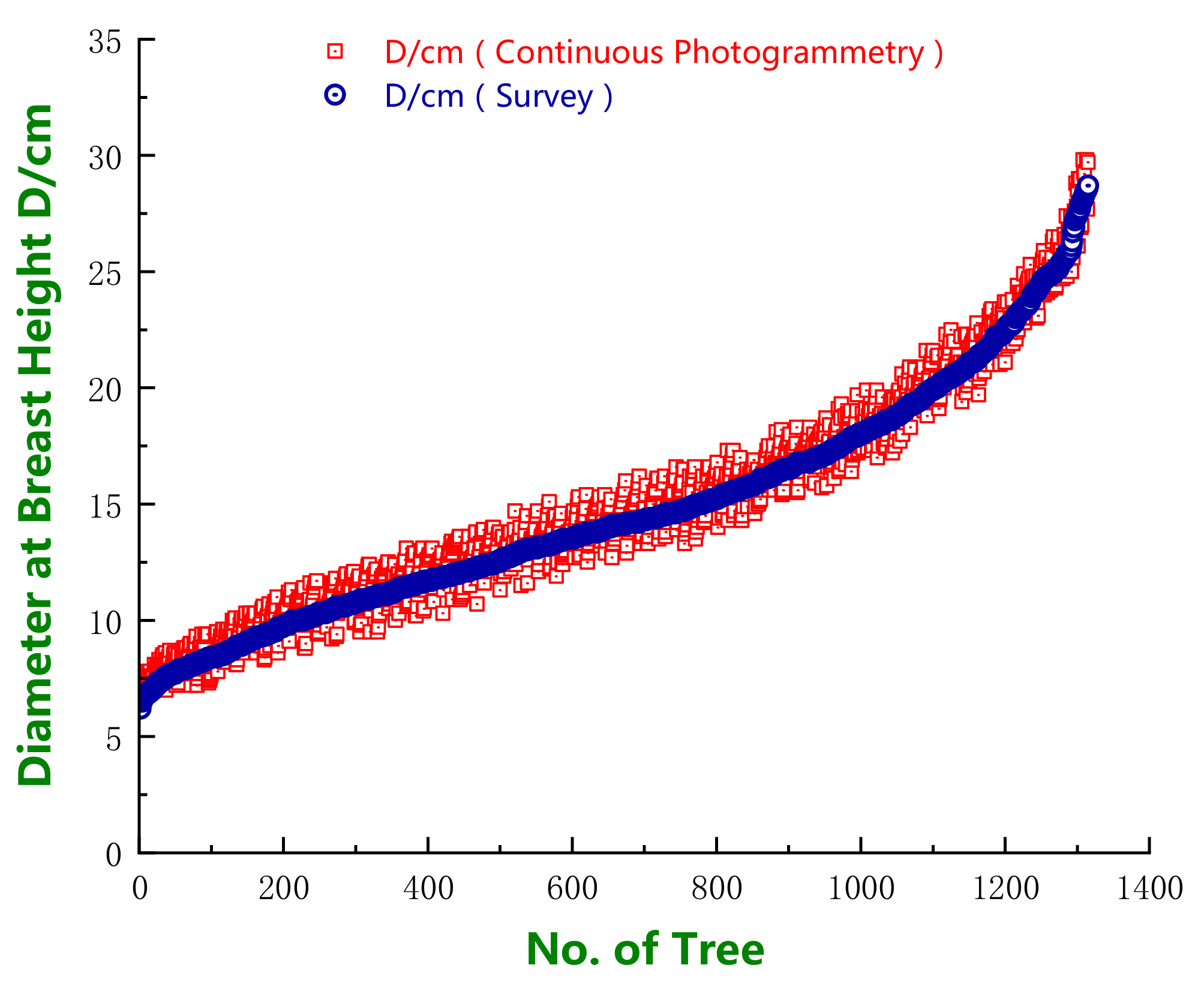
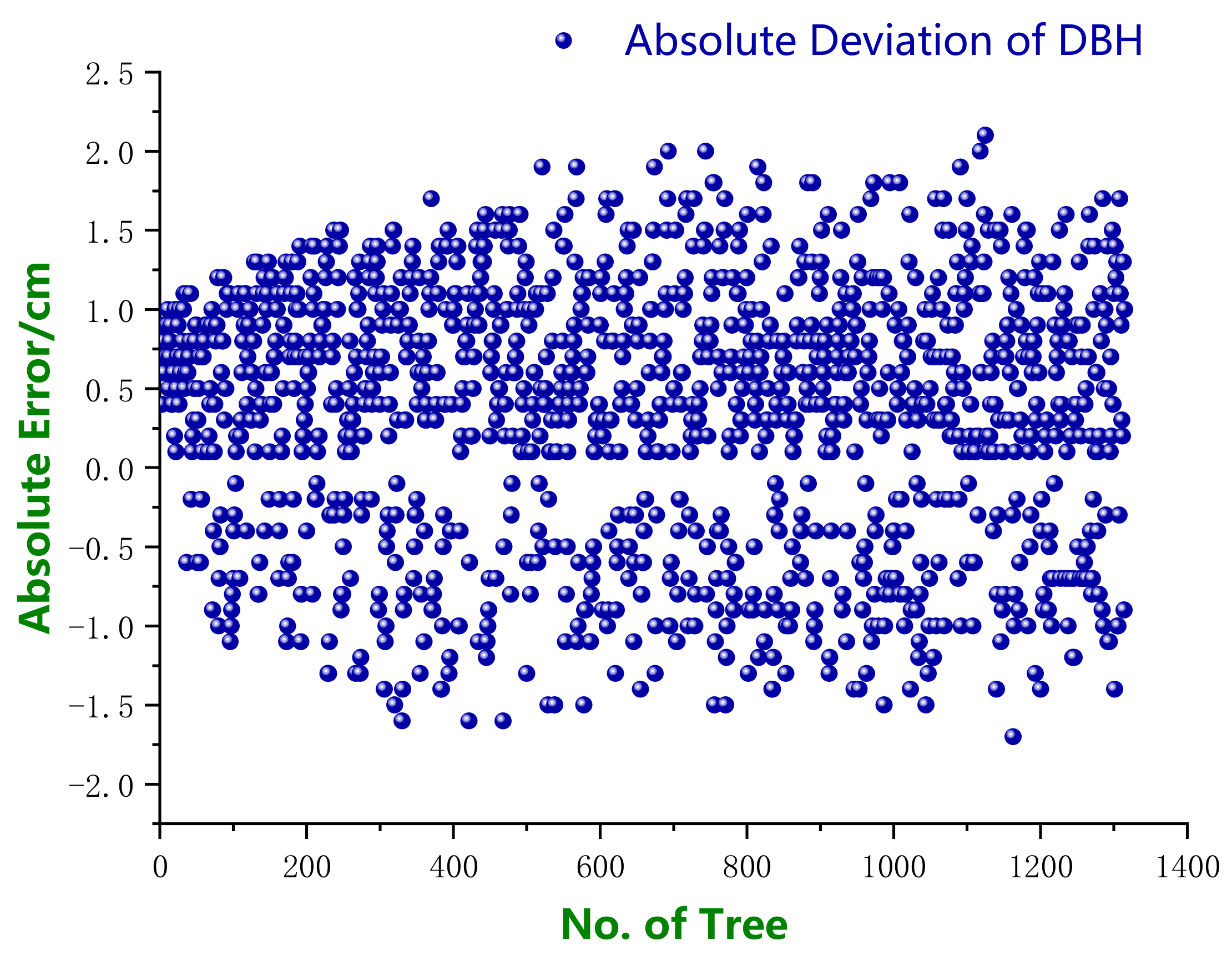
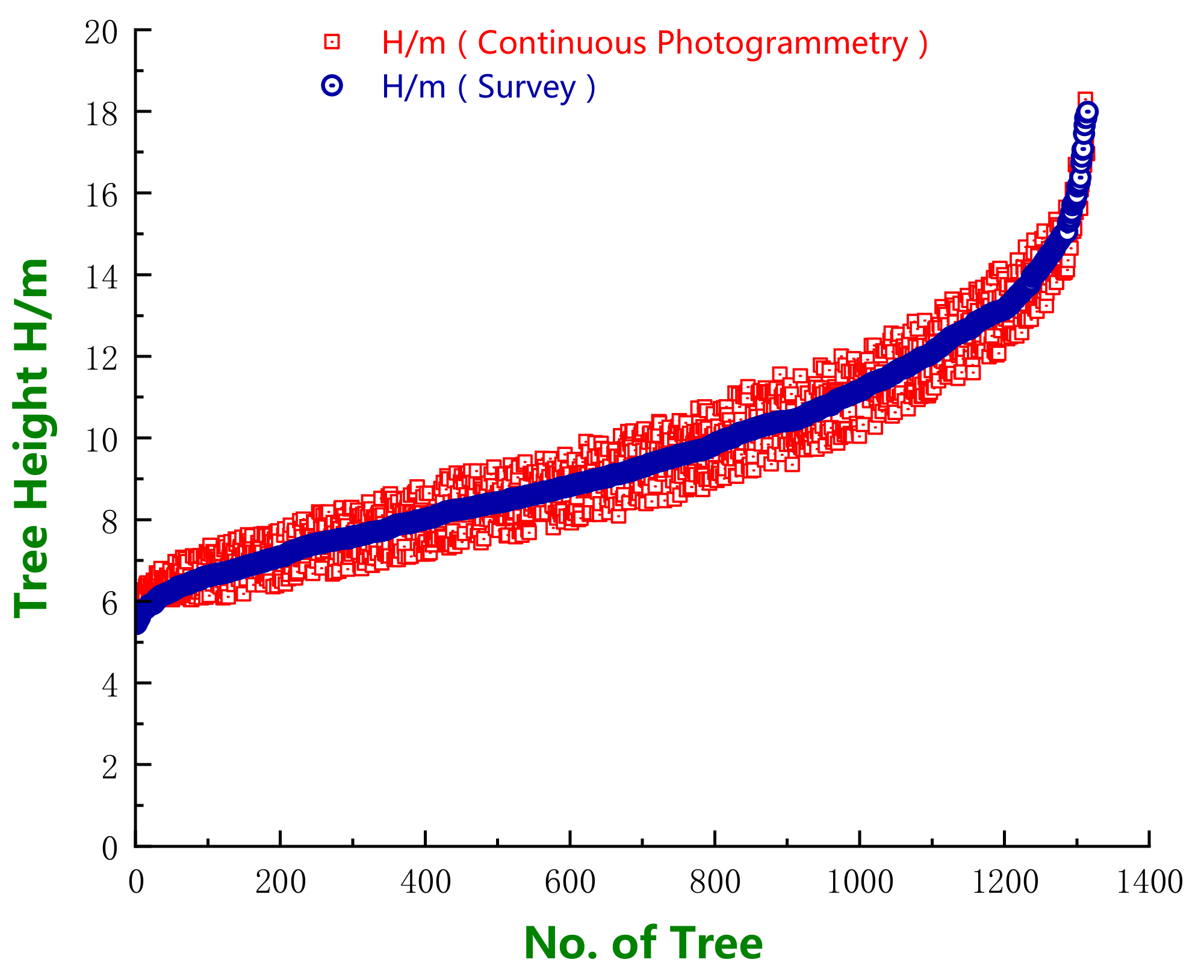
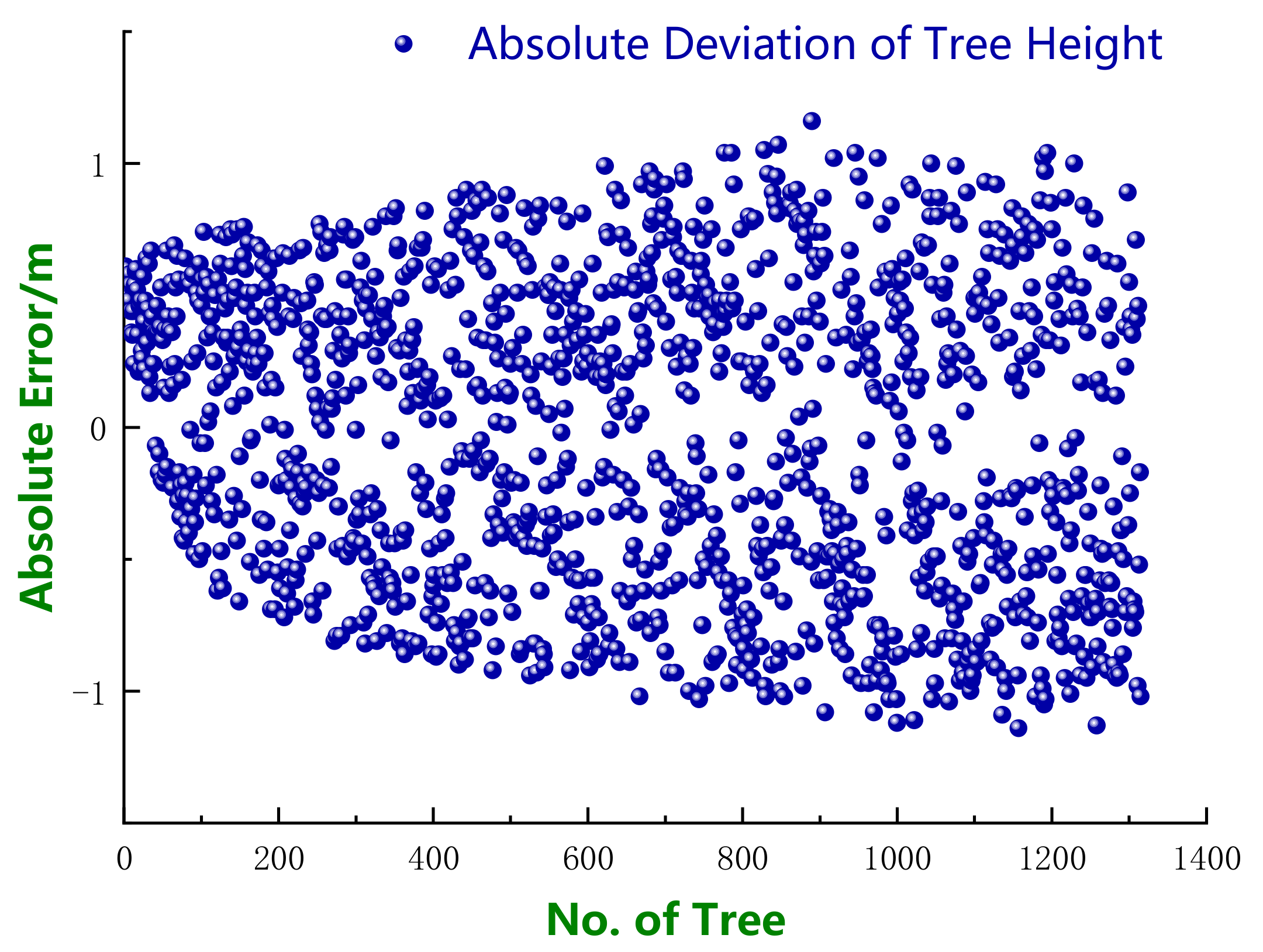
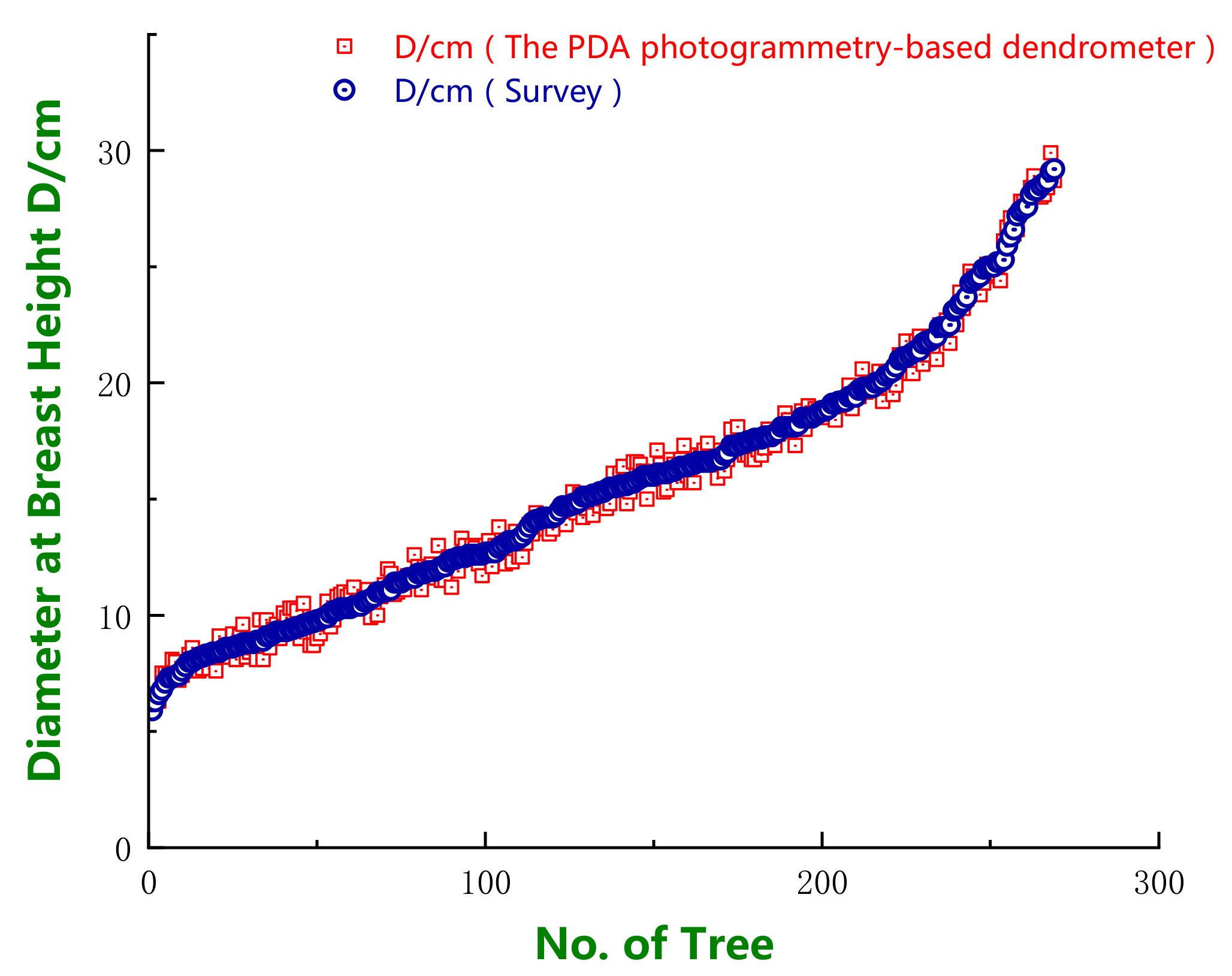
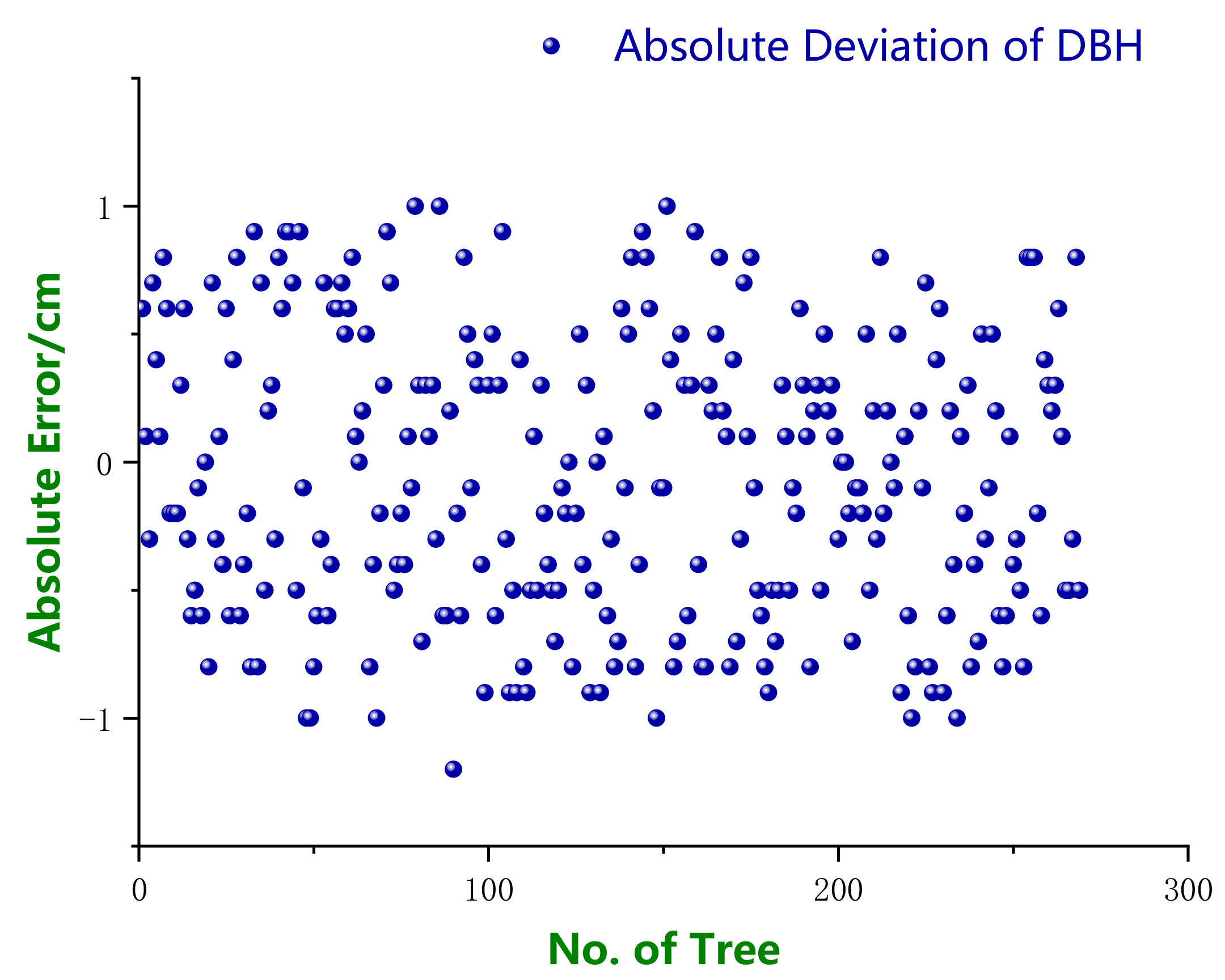
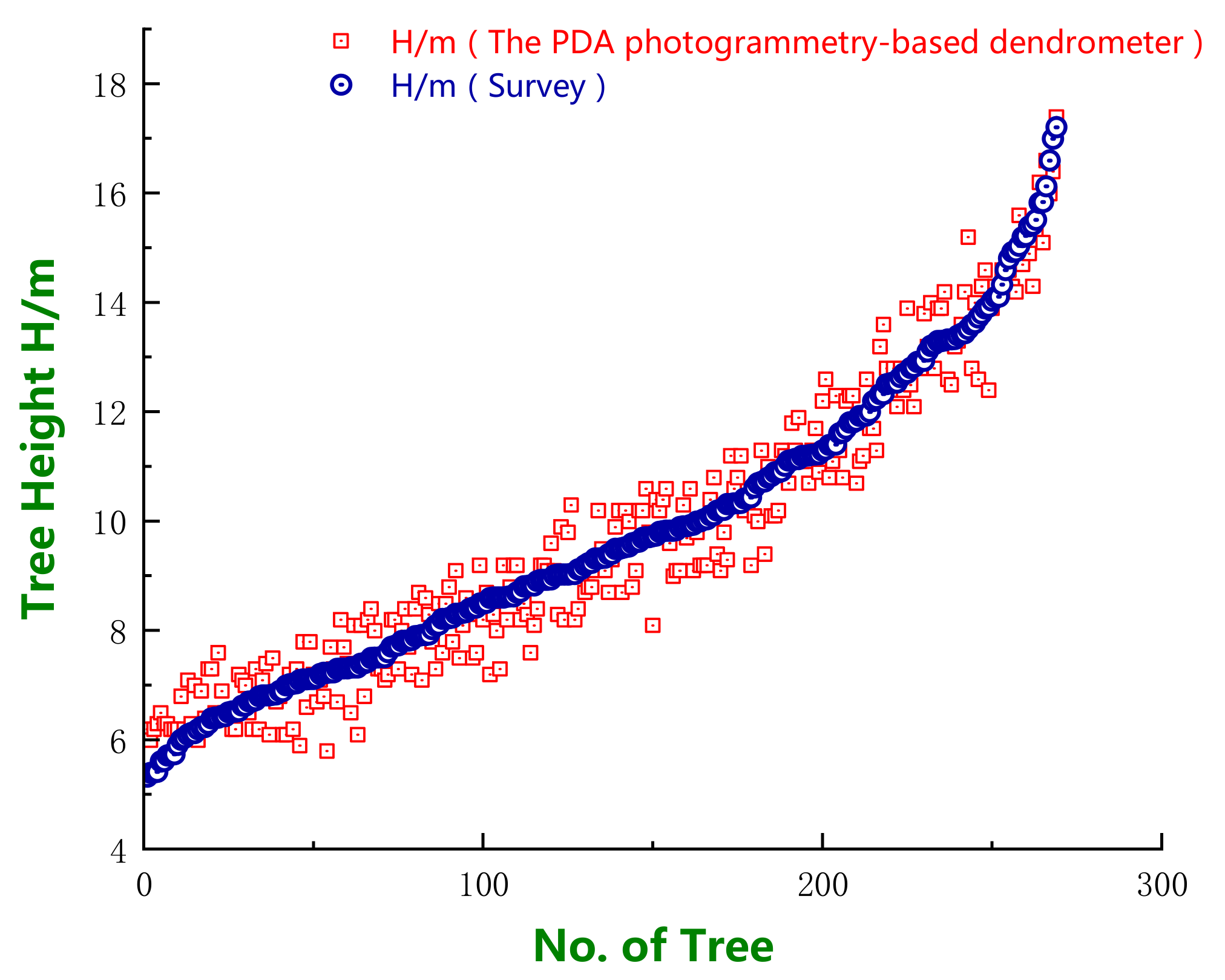
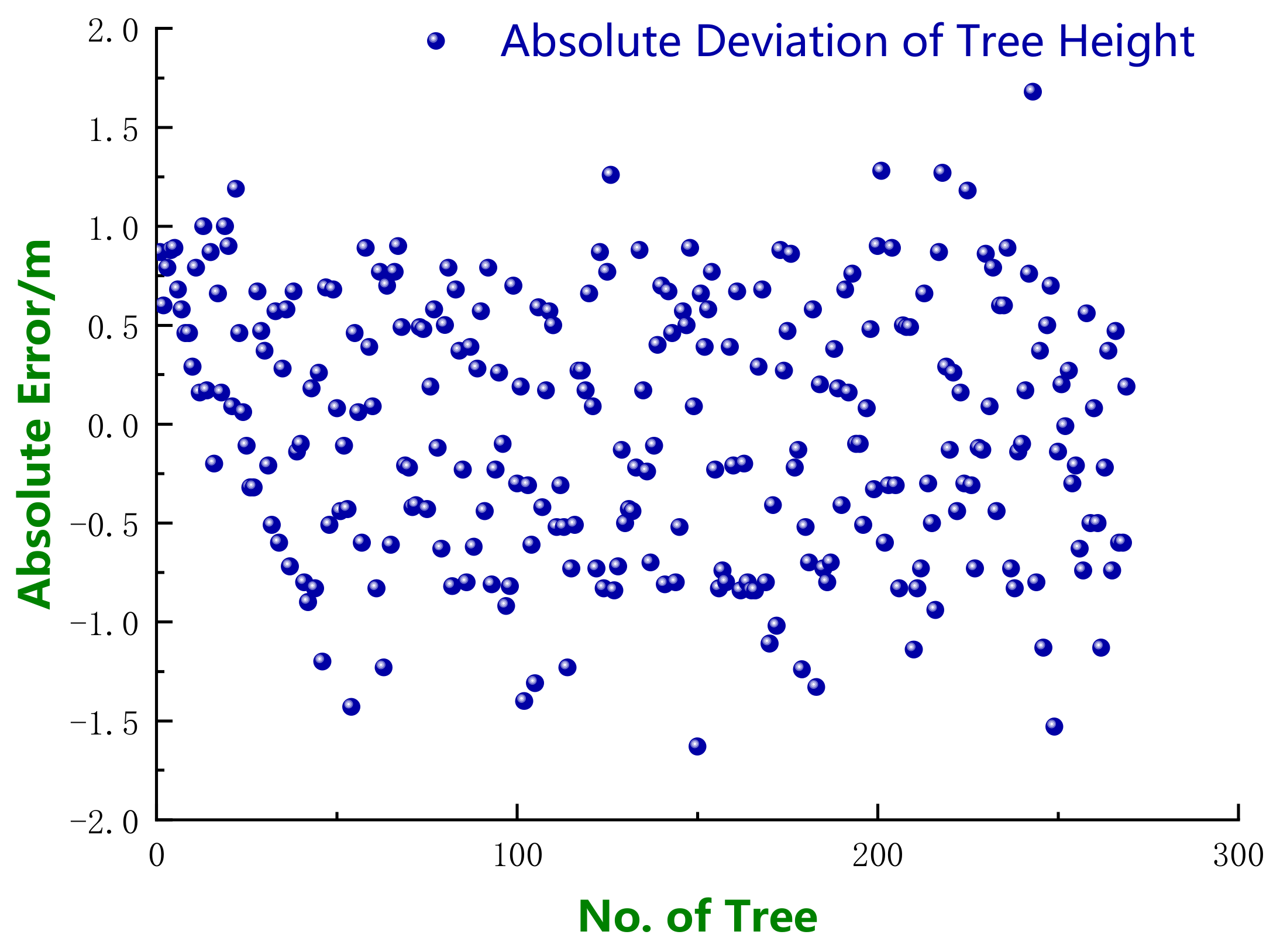
3.3. Experimental Analysis of Remote Tree Measurement
4. Conclusions
- (1)
- In response to the hardware problems of the existing system, such as the high cost of the measuring instruments, low measurement efficiency, inconvenience of transporting the instruments, and complicated operation, a PDA photogrammetric dendrometer system was researched and developed that is portable, easy to operate, and affordable. This instrument can obtain image, azimuth, and coordinates accurately and efficiently.
- (2)
- Related to the problems of poor effectiveness and low precision in the reconstruction of ground photogrammetric 3D points, an optimized adjustment algorithm for image correction and software for stand plot continuous photogrammetric measurement were developed. The software can correct, match, and optimize information such as the photograph, azimuth, and coordinates, and can import the optimized images into 3D modeling software to reconstruct 3D stand point clouds.
- (3)
- To address problems such as the difficulty of taking measurements under complex terrain conditions and the loss of point clouds during the 3D reconstruction process, an analytic algorithm and software for remote tree measurement were developed. The software is embedded in the PDA photogrammetric dendrometer, so it can perform remote supplementary measurements of DBH and tree height in inaccessible or missed areas.
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
References
- McRoberts, R.E.; Tomppo, E.O.; Schadauer, K.; Ståhl, G. Harmonizing national forest inventories. For. Sci. 2012, 58, 189–190. [Google Scholar] [CrossRef]
- Božić, M.; Čavlović, J.; Lukić, N.; Teslak, K.; Kos, D. Efficiency of ultrasonic vertex iii hypsometer compared to the most commonly used hypsometers in croatian forestry. Croat. J. For. Eng. 2005, 26, 91–99. [Google Scholar]
- Avery, T.E.; Burkhart, H.E. Forest Measurements; Waveland Press: Long Grove, IL, USA, 2015. [Google Scholar]
- Rivas, J.C.; Gonzalez, J.A.; Aguirre, O.; Hernández, F. The effect of competition on individual tree basal area growth in mature stands of pinus cooperi blanco in Durango (Mexico). Eur. J. For. Res. 2005, 124, 133–142. [Google Scholar] [CrossRef]
- Feng, Z.; Yan, F.; Ullah, M.R.; Dang, Y. Developing a volume model using south nts-372r total station without tree felling in a populus canadensis moench plantation in Beijing, China. Croat. J. For. Eng. 2017, 38, 141–150. [Google Scholar]
- Yan, F.; Ullah, M.R.; Gong, Y.; Feng, Z.; Chowdury, Y.; Wu, L. Use of a no prism total station for field measurements in pinus tabulaeformis carr. Stands in china. Biosyst. Eng. 2012, 113, 259–265. [Google Scholar] [CrossRef]
- Stas, S.M.; Rutishauser, E.; Chave, J.; Anten, N.P.; Laumonier, Y. Estimating the aboveground biomass in an old secondary forest on limestone in the moluccas, indonesia: Comparing locally developed versus existing allometric models. For. Ecol. Manag. 2017, 389, 27–34. [Google Scholar] [CrossRef]
- Shen, H.; Zhang, K.; Nejati, A. A noncontact positioning measuring system based on distributed wireless networks. Peer-to-Peer Netw. Appl. 2017, 10, 823–832. [Google Scholar] [CrossRef]
- Yu, L.; Zhou, K. A dynamic local path planning method for outdoor robot based on characteristics extraction of laser rangefinder and extended support vector machine. Int. J. Pattern Recognit. Artif. Intell. 2016, 30, 1659004. [Google Scholar] [CrossRef]
- Newnham, G.J.; Armston, J.D.; Calders, K.; Disney, M.I.; Lovell, J.L.; Schaaf, C.B.; Strahler, A.H.; Danson, F.M. Terrestrial laser scanning for plot-scale forest measurement. Curr. For. Rep. 2015, 1, 239–251. [Google Scholar] [CrossRef]
- Zhong, C.; Yicheng, G.; Zhongke, F. Error analysis on standing tree volume measurement by using electronic theodolites. Trans. Chin. Soc. Agric. Mach. 2015, 46, 292–298. [Google Scholar]
- Xiang, G.; Zhongke, F.; Zhichao, W. Study on stem form index based on non-destructive precision measurement through electronic theodolite. Trans. Chin. Soc. Agric. Mach. 2015, 46, 299–305. [Google Scholar]
- He, C.; Hong, X.; Liu, K.; Zhang, S.; Wang, Q. An improved technique for non-destructive measurement of the stem volume of standing wood. South. For. J. For. Sci. 2016, 78, 53–60. [Google Scholar] [CrossRef]
- Xu, W.; Su, Z.; Feng, Z.; Xu, H.; Jiao, Y.; Yan, F. Comparison of conventional measurement and lidar-based measurement for crown structures. Comput. Electron. Agric. 2013, 98, 242–251. [Google Scholar] [CrossRef]
- Huang, X.; Feng, Z.; Xie, M.; Chen, J.; Liu, J. Developing and accuracy analysis of portable device for automatically measuring diameter at breast height and tree height. Trans. Chin. Soc. Agric. Eng. 2015, 31, 92–99. [Google Scholar]
- Xu, W.; Feng, Z.; Su, Z.; Xu, H.; Jiao, Y.; Fan, J. Development and experiment of handheld digitalized and multi-functional forest measurement gun. Trans. Chin. Soc. Agric. Eng. 2013, 29, 90–99. [Google Scholar]
- Zhongmou, F.; Zhongke, F.; Jun, Z. An establishment of tree crown volume calculation and prediction model using cubic lattice method. Trans. Chin. Soc. Agric. Mach. 2015, 3, 320–327. [Google Scholar]
- Maltamo, M.; Bollandsås, O.; Gobakken, T.; Næsset, E. Large-scale prediction of aboveground biomass in heterogeneous mountain forests by means of airborne laser scanning. Can. J. For. Res. 2016, 46, 1138–1144. [Google Scholar] [CrossRef]
- Ene, L.T.; Næsset, E.; Gobakken, T.; Mauya, E.W.; Bollandsås, O.M.; Gregoire, T.G.; Ståhl, G.; Zahabu, E. Large-scale estimation of aboveground biomass in miombo woodlands using airborne laser scanning and national forest inventory data. Remote Sens. Environ. 2016, 186, 626–636. [Google Scholar] [CrossRef]
- Andersen, H.-E.; Reutebuch, S.E.; McGaughey, R.J. A rigorous assessment of tree height measurements obtained using airborne lidar and conventional field methods. Can. J. Remote Sens. 2006, 32, 355–366. [Google Scholar] [CrossRef]
- Dechesne, C.; Mallet, C.; Le Bris, A.; Gouet-Brunet, V. Semantic segmentation of forest stands of pure species combining airborne lidar data and very high resolution multispectral imagery. ISPRS J. Photogramm. Remote Sens. 2017, 126, 129–145. [Google Scholar] [CrossRef]
- Goldbergs, G.; Levick, S.R.; Lawes, M.; Edwards, A. Hierarchical integration of individual tree and area-based approaches for savanna biomass uncertainty estimation from airborne lidar. Remote Sens. Environ. 2018, 205, 141–150. [Google Scholar] [CrossRef]
- Huang, L.; Chen, C.; Shen, H.; He, B. Adaptive registration algorithm of color images based on surf. Measurement 2015, 66, 118–124. [Google Scholar] [CrossRef]
- Kang, T.-K.; Choi, I.-H.; Lim, M.-T. Mdghm-surf: A robust local image descriptor based on modified discrete gaussian–hermite moment. Pattern Recognit. 2015, 48, 670–684. [Google Scholar] [CrossRef]
- Lee, Y.-H.; Kim, Y. Efficient image retrieval using advanced surf and dcd on mobile platform. Multimed. Tools Appl. 2015, 74, 2289–2299. [Google Scholar] [CrossRef]
- Wu, M.; Li, X.; Liu, C.; Liu, M.; Zhao, N.; Wang, J.; Wan, X.; Rao, Z.; Zhu, L. Robust global motion estimation for video security based on improved k-means clustering. J. Ambient Intell. Humaniz. Comput. 2017, 3, 1–10. [Google Scholar] [CrossRef]
- Valgren, C.; Lilienthal, A.J. Sift, surf & seasons: Appearance-based long-term localization in outdoor environments. Robot. Auton. Syst. 2010, 58, 149–156. [Google Scholar]
- Liang, X.; Wang, Y.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Honkavaara, E.; Liu, J. Forest data collection using terrestrial image-based point clouds from a handheld camera compared to terrestrial and personal laser scanning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5117–5132. [Google Scholar] [CrossRef]
- Morgenroth, J.; Gómez, C. Assessment of tree structure using a 3d image analysis technique—A proof of concept. Urban For. Urban Green. 2014, 13, 198–203. [Google Scholar] [CrossRef]
- Lin, W.; Meng, Y.; Qiu, Z.; Zhang, S.; Wu, J. Measurement and calculation of crown projection area and crown volume of individual trees based on 3d laser-scanned point-cloud data. Int. J. Remote Sens. 2017, 38, 1083–1100. [Google Scholar] [CrossRef]
- Yu, D.; Feng, Z.; Cao, Z.; Jiang, J. Error analysis of measuring diameter at breast height and tree height and volume of standing tree by total station. Trans. Chin. Soc. Agric. Eng. 2016, 32, 160–167. [Google Scholar]
- Liang, X.; Hyyppä, J.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Yu, X. The use of a mobile laser scanning system for mapping large forest plots. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1504–1508. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Investigation Factor | A-Level Error | B-Level Error | C-Level Error |
|---|---|---|---|
| Sub-compartment area | 5 | 5 | 5 |
| Tree species composition | 5 | 10 | 20 |
| Tree height | 5 | 10 | 15 |
| DBH | 5 | 10 | 15 |
| Age | 10 | 15 | 20 |
| Canopy density | 5 | 10 | 15 |
| Sectional area per hectare | 5 | 10 | 15 |
| Volume per hectare | 15 | 20 | 25 |
| Number of tree per hectare | 5 | 10 | 15 |
| Bias | Bias% | RMSE | RSME% | |
|---|---|---|---|---|
| DBH (cm) | 0.3531 | 0.8784 | 2.3942 | 5.9563 |
| Bias | Bias% | RMSE | RSME% | |
|---|---|---|---|---|
| Tree Height (m) | −0.0190 | 0.5704 | −0.1988 | 5.9634 |
| Bias | Bias% | RMSE | RSME% | |
|---|---|---|---|---|
| DBH (cm) | −0.0636 | 0.5545 | −0.4097 | 3.5736 |
| Bias | Bias% | RMSE | RSME% | |
|---|---|---|---|---|
| Tree Height (m) | −0.0139 | 0.6507 | −0.1435 | 6.6971 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, Z.; Feng, Z.; Jiang, J.; Lin, Y.; Xue, S. Application of a Continuous Terrestrial Photogrammetric Measurement System for Plot Monitoring in the Beijing Songshan National Nature Reserve. Remote Sens. 2018, 10, 1080. https://doi.org/10.3390/rs10071080
Qiu Z, Feng Z, Jiang J, Lin Y, Xue S. Application of a Continuous Terrestrial Photogrammetric Measurement System for Plot Monitoring in the Beijing Songshan National Nature Reserve. Remote Sensing. 2018; 10(7):1080. https://doi.org/10.3390/rs10071080
Chicago/Turabian StyleQiu, Zixuan, Zhongke Feng, Junzhiwei Jiang, Yicheng Lin, and Shaolong Xue. 2018. "Application of a Continuous Terrestrial Photogrammetric Measurement System for Plot Monitoring in the Beijing Songshan National Nature Reserve" Remote Sensing 10, no. 7: 1080. https://doi.org/10.3390/rs10071080