1. Introduction
The complexities of building and infrastructure projects are increasing worldwide, which are reflected by the complication of corresponding tools, technologies, and operational controls [
1,
2]. This creates unprecedented challenges to facilities management (FM) [
3,
4]. The role of sustainable facilities management (SFM) is critical to the planning, maintenance, and management of these complex facilities [
3,
5,
6]. SFM incorporates the people, place and business with optimized economic, environmental and social benefits of sustainability [
7,
8]. In addition, SFM requires the integration of multiple disciplines, including mechanical, electrical, plumbing, and fire protection (MEPFP), to ensure the functionality of built environment [
5,
8]. The practice of SFM upsurges the complexity of MEPFP systems which are critical in facilities management [
8].
The management and control of MEPFP systems in a facility are very important in building operation and maintenance of SFM [
3,
5,
9]. Especially in complex projects, such as hospitals, science labs, and technology parks, the total investment of MEPFP systems on average can even reach 50% of the total investment of such a project [
3,
5,
10,
11]. The traditional FM on MEPFP systems often needs to follow certain routines [
12,
13]. The routines are pre-set programs which are static and low in efficiency [
13,
14]. Therefore, it is of great significance to study dynamic operation and maintenance methods for the management of MEPFP systems to improve system efficiency of SFM. There is an urgent need to extensively investigate adaptive and optimized control models on the Heating, Ventilating, and Air Conditioning (HVAC) systems for SFM [
15]. Researchers and engineers consider the energy consumption strategy of static low-temperature settings to be conservative, which causes the cooling systems in buildings to be inefficient [
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26]. This research focuses on the optimization of energy efficiency of the HVAC systems for SFM. The research objectives include the following items: (1) to study the current energy management schemes in HVAC systems; and (2) to develop a proactive control method to stabilize temperatures effectively. In this case, the research question is: can the proactive control method reduce the energy consumption for SFM? The target is to reduce the energy consumption that is wasted in regulating temperature fluctuations.
Currently, researchers, engineers and facility managers notice the urgency of learning and adaptation of different actors at various systems. The understanding of how to control MEPFP systems, together with the administration of facility utilization on various technical, economic, social and geographic scales, has become a precondition for the emergence of sustainable development [
27,
28]. There are a variety of control schemes developed for thermal management in SFM with the purpose to reduce energy costs [
8,
29]. For sustainable and smart management of HVAC systems, model-based scheme is able to determine the control strategies and react quickly to the rapid changes of indoor environment [
8,
29,
30]. The Model Predictive Control (MPC) approach is a promising method for analytical control on energy consumption [
31]. There are three main MPC methods, including Linear Regression Algorithm (LRA) [
29,
32], Time Series Prediction Algorithm (TSPA) [
29,
33], and Artificial Neural Network Algorithm (ANNA) [
29,
34]. This research suggests integrating TSPA method with multi-source data to develop an optimized on-demand control model for efficient and sustainable energy management. Commercial buildings (e.g., office buildings, classrooms, theaters, and airports) have relatively stable operation schedules. The temperature changes in these buildings follow established patterns typically [
12,
13,
14]. The operation schedule of HVAC systems in a commercial building is usually predictable because the building is mainly for a certain type of business or service. This feature is a necessary condition for the effective application of TSPA in this research.
The system designed in this research is a coordinated proactive control method using dynamic time series prediction (PCM-DTSP) for SFM, which optimizes system controls by integrating the prediction results and monitored environmental data. The aim of the development of this PCM-DTSP system is to optimize energy efficiency, which paves the way for long-term comprehensive energy management. The results of the research demonstrate the optimized control of energy consumption, temperature stabilization, and improvement of environmental comfort. The research method and the PCM-DTSP system can be generalized to SFM of various types of buildings. This research has remarkable contribution to theoretical models and implementation of optimization method in sustainable management of energy use. Compared to static settings, dynamic controls of complex mechanical systems are able to recognize requirements or needs of existing building operation and maintenance and understand the requirements to improve the quality of SFM [
35]. The test data of the research show that, after the fulfillment of the optimized method, energy consumption of the samples was reduced. The energy saving would be noteworthy in the operation and management of SFM. The practice helps to improve environmental awareness in policy makers, facility managers, and system engineers.
This paper is organized as follows. In the Introduction Section, the paper discusses the importance of energy management in SFM, explains the research question, and briefly describes the contributions of solving the problem. The Literature Review Section presents different analytical models for energy management and describes how the proposed methodology is different from the state-of-the-art. The Methodology Section discusses the optimized method of cooling systems based on MPC. It includes the integration and optimization subsections. The Result Analysis Section analyzes the actual archived data and compares it with experimental data. The last section concludes this study and elaborates the research limitations.
2. Literature Review
One goal of sustainability in facility management (sustainability facilities management or SFM) is to make sure that all the supporting services offered by FM shall improve the sustainability of the facility customers [
5,
36]. For buildings, FM and energy management are closely related, because an average 25% of complete operating costs are energy costs [
37,
38]. The majority of energy consumed in buildings is for the Heating, Ventilating, and Air Conditioning (HVAC), particularly when there are differences between indoor and outdoor temperatures. Energy consumption accounts for about 60% of all delivered energy consumed in buildings [
39]. There is an urgent need to extensively investigate adaptive and optimized control models on the HVAC systems for SFM [
15]. If buildings are able to respond to energy management schemes through advance operation strategies and smart grid infrastructure, it will help to avoid waste of electricity [
38]. Consequently, the proposed strategy focuses on managing HVAC systems, considering commercial buildings.
2.1. Optimization Approaches for System Efficiency in Sustainable Facilities Management
Model based predictive control (MPC) has been used widely in chemical plants, oil refineries and other process industries since the 1980s. Presently, MPC is also used in power systems as balancing models [
40]. MPC is important to active operations of HVAC systems [
41]. As the basis of MPC, energy forecasting models need to have high fidelity and computationally efficiency in electrical systems of buildings [
42]. The energy forecasting models can crucially affect the energy consumptions in HVAC systems [
21,
43]. To improve energy efficiency, it is critical to optimize system operations in SFM [
44]. There are two approaches to address the optimization of HVAC system efficiency in buildings [
17,
18,
20,
22,
23,
25]. The two approaches include optimization of airflow organization and enhancement of AC control. The first approach is to optimize the airflow organization of HVAC systems for the purpose of improving system efficiency. For example, in the research project of Ham et al. [
18], the modular building used closed cold/hot channels to arrange airflow. Another example is the natural-air cooling systems introduced by Ogawa et al. [
22] to reduce energy consumption. Endo et al. proposed a cooling control method based on the predictions of the thermal management requirements at a modular building [
19]. The method directly utilized fresh air to cool down temperatures following calculated predictions. Endo et al. claimed that they were able to achieve a satisfactory balance between the thermal requirements and energy savings. Nonetheless, the system depended excessively on the air temperature of external environment. Overall, the first approach is limited on the energy efficiency of HVAC systems.
The second approach is to enhance the control of heating/cooling systems by reducing redundant heating/cooling supply. For example, Oxley et al. studied the improvement of computer room air conditioners (CRAC) for heterogeneous high-performance systems under thermal and energy constraints [
23]. Ogawa et al. [
22] and Durand-Estebe et al. [
17] suggested to optimize the controls of fan speeds for temperature control. Thota et al. studied how to forecast cooling loads for temperature control [
25]. Particularly, Huang et al. recommended to determine the set points of air conditioners based on the utilization level of a building [
20]. However, the approach failed to minimize the overall energy consumption of the systems and fans. Zhou et al. studied the improvement of cooling efficiency through localized and optimized cooling resources [
26]. Zhou et al. suggested to use adaptive vent tiles mounted on floor and control cooling provisions to reduce costs [
26]. However, the suggestion did not consider the power consumption of cooling fans. For dynamic service provision, researchers studied the method of using workload predictions for buildings [
45]. For example, Yin and Sinopoli developed the approaches that coordinated service provision with thermal-load awareness in job scheduling [
45]. However, the coordinated method simply considered the control strategy in two stages. Stage 1 was to find the optimized capacities at different areas. Stage 1 was to use the capacities as the load balancers to calculate the optimized quality-of-service cost. The coordinated method did not integrate the nonlinear changes of loads. It had very limited consideration on the dynamic features of cooling systems.
Table 1 is a comparison of the two approaches. It lists the characteristics of the different optimization methods of control schemes for energy management.
2.2. Algorithms of Model Predictive Control
Currently, designers often implement steady-state algorithms in energy management models to reduce redundant cooling supply in HVAC control systems, indicated as the second approach in the previous discussion [
46,
47]. The purpose of the applications are to establish job schedules for HVAC control systems with thermal-load awareness capacities [
47,
48]. Such methods are not applicable under dynamic service provision, especially when the environmental temperatures change frequently and unpredictably.
To gain the dynamic feature in the controls of HVAC systems, MPC uses model-based advanced technology with analytical regulators. At present, the main MPC methods are Linear Regression Algorithm (LRA) [
32], Time Series Prediction Algorithm (TSPA) [
33], and Artificial Neural Network Algorithm (ANNA) [
34]. Zhou et al. analyzed LRA and nonlinear regression energy models based on performance counters and system utilization [
32]. They proposed a regression energy model with support vectors. Because the thermal distribution of was a slow process, the selected parameters in the regression model would be too sensitive for thermal management [
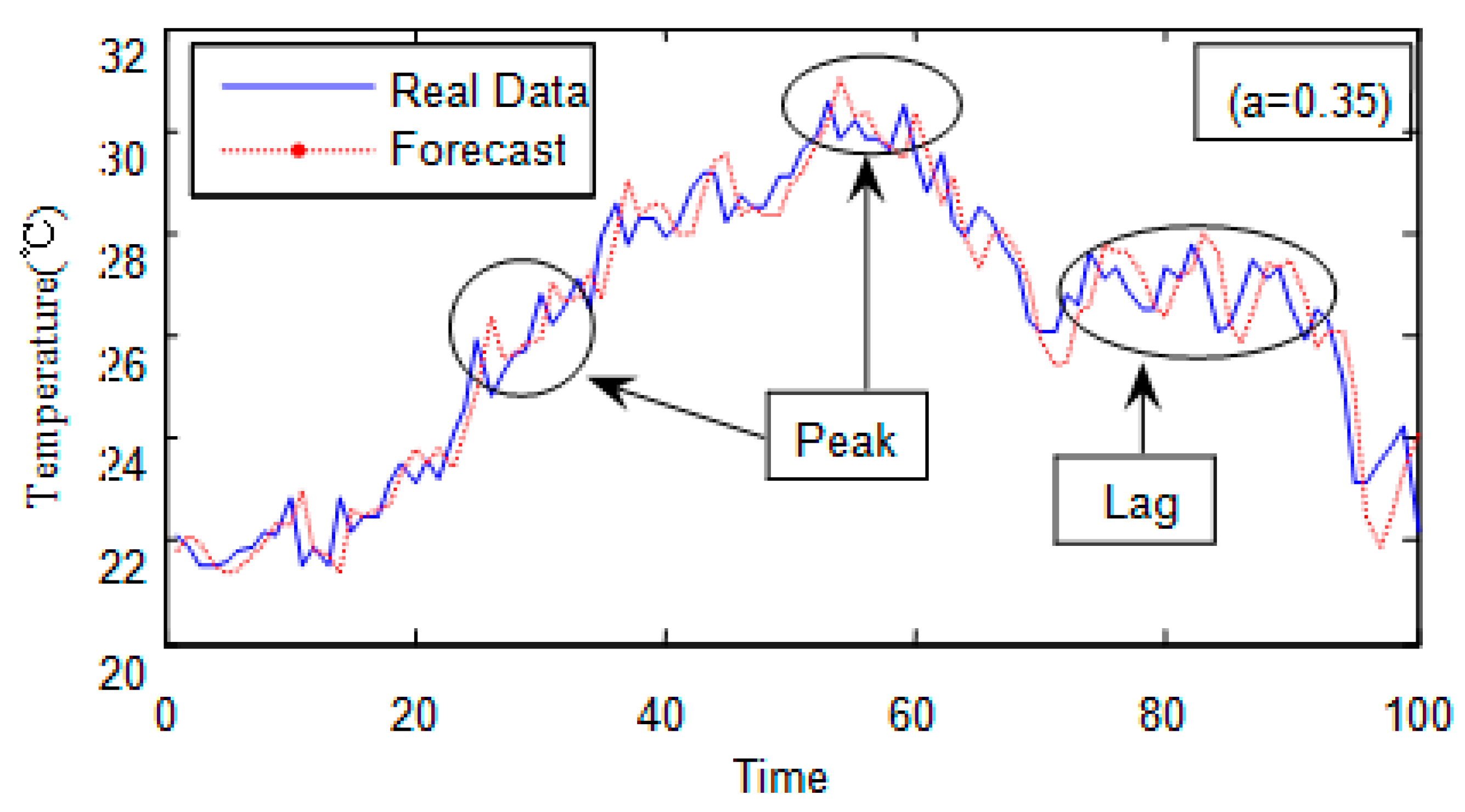
26]. Tarutani et al. proposed a method to predict the temperatures of sensors and the outlet temperature of an air conditioner by using regression models [
33]. The prediction method contained TSPA. The predicted results were used to change the parameter settings of the air conditioner. However, in the research of Tarutani et al., only the latest temperature was considered in the forecast. Moreover, only the maximum temperature prediction was selected in the process [
33]. The physical space relationship between air conditioners and sensors was not considered. An example of ANNA can be found in Ahn et al., who proposed a comparative analysis of the controllers of heated air supply [
34]. The analysis dealt with the amount of mass and air temperatures by using ANNA. They aimed to control the mass and temperatures of supply air per users’ demands. However, there was a lack of consideration of room temperature distribution in the learning model [
34].
The LRA, TSPA and ANNA all have advantages and disadvantages. In a LRA Model, the selections of variables and parameters are very important. The selections of parameters directly affect the accuracy of the prediction model. Nevertheless, many factors affect the thermal distribution. Hence, it is difficult to select the variables or parameters accurately when using LRA. TSPA depends on the continuous development of temperatures, using the statistical analysis of historical temperature data to predict the development trend of current temperature. TSPA uses time series data. When great changes take place in time series data, it affects the prediction results. Thus, TSPA is more suitable for short-term forecasts than long-term ones. ANNA is capable of nonlinear mapping and self-learning. However, the predictive ability of ANNA depends on the maturity of its training model. Because of the slow convergence of the algorithm, it has the problem of lags in dynamic control of air conditioners. When selecting an optimization control method for cooling systems, it is necessary to meet the requirement of rapid optimization control of the cooling systems in short term, following the trend of temperature changes.
3. Methodology
This paper proposes a proactive approach to reduce potential hot spots (i.e., areas with high temperatures) in buildings.
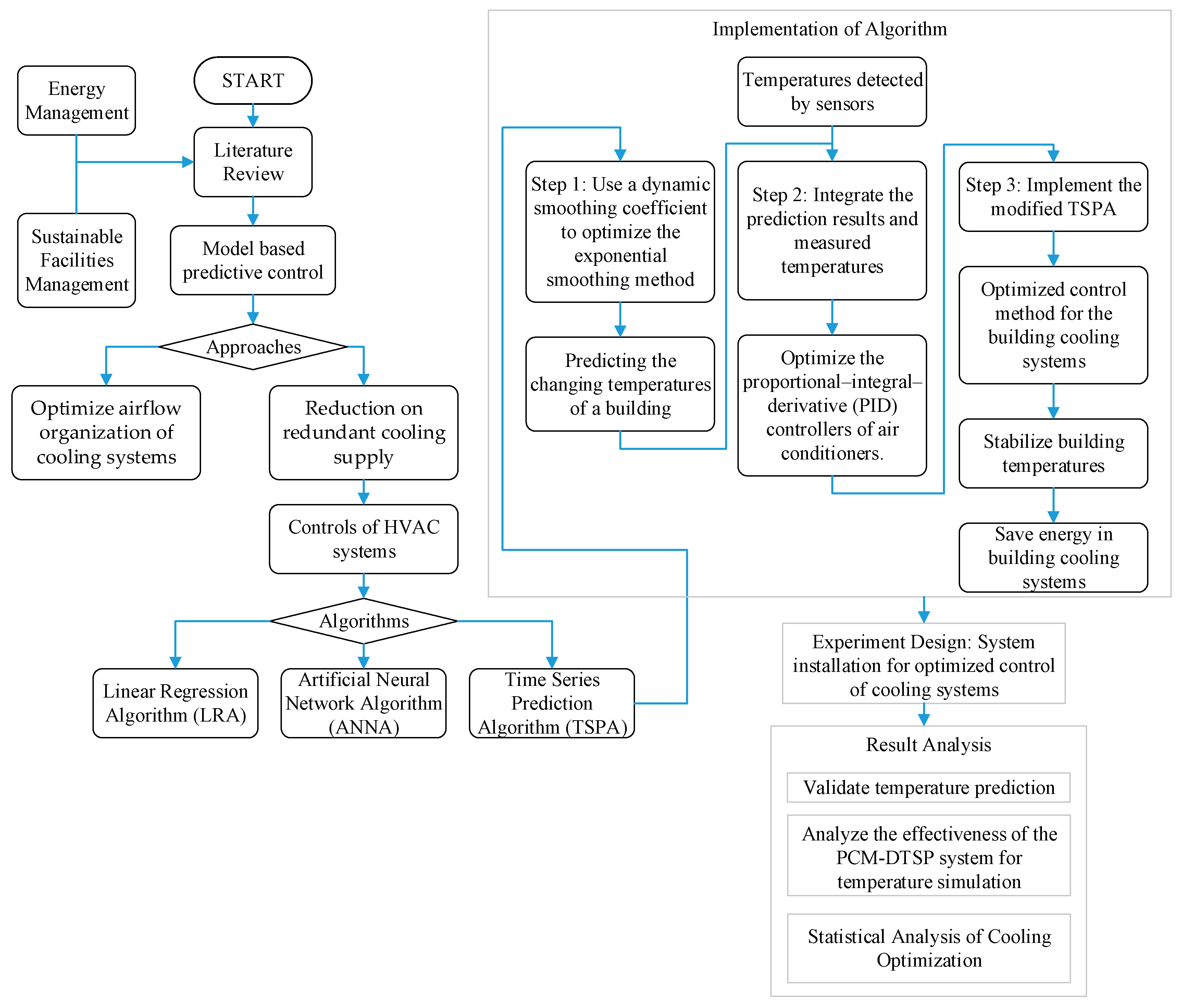
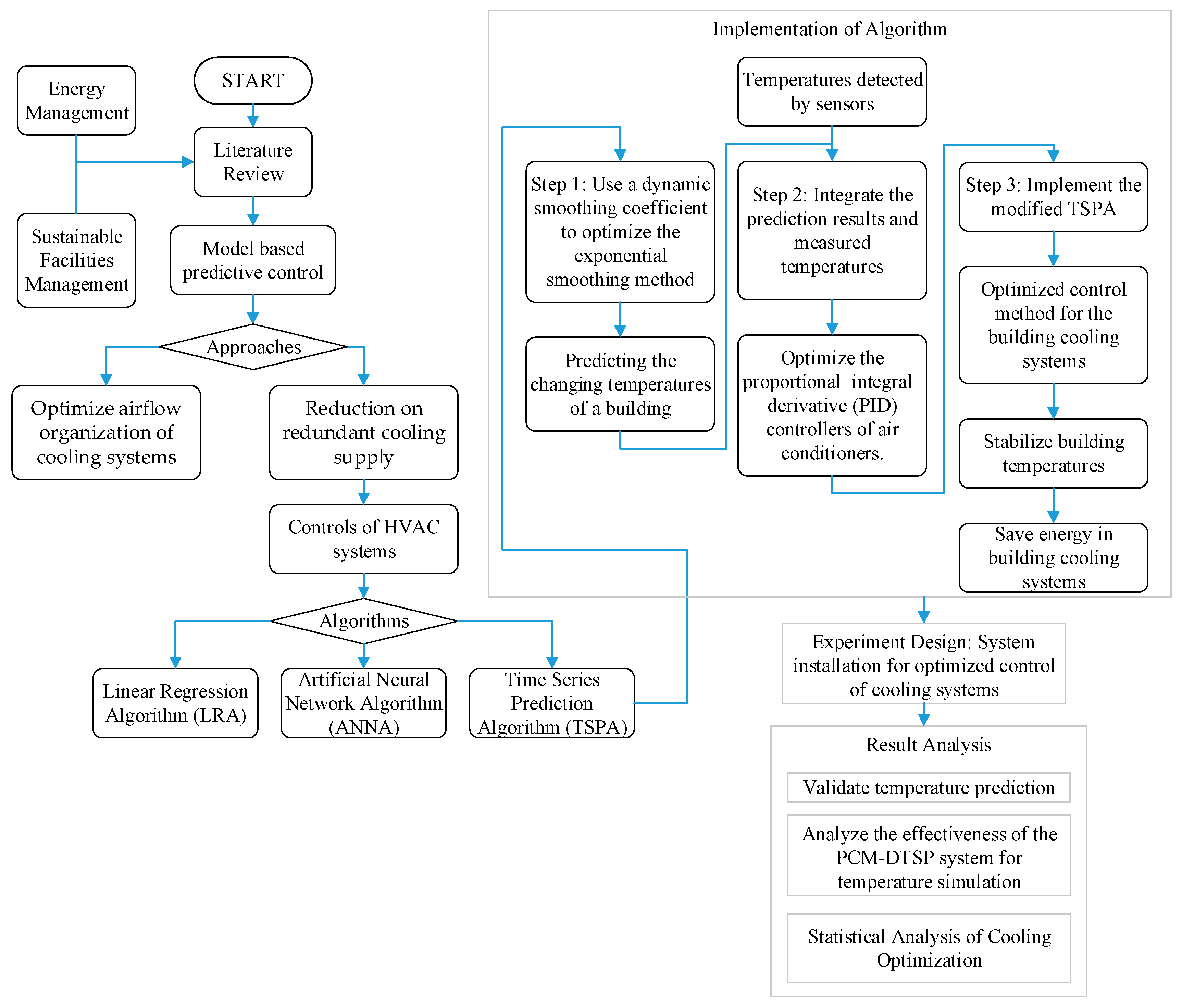
Figure 1 shows the research design. The first step is to use a dynamic smoothing coefficient to optimize the exponential smoothing method when predicting the changing temperatures of a building. The second step integrates the prediction results and the temperatures detected by sensors to optimize the proportional-integral-derivative controller (PID controller) of air conditioners. The last step is to implement the modified TSPA as an optimization control method for building cooling systems. The proactive control method is able to stabilize building temperatures more effectively than LRA. With a relatively stable temperature, the cooling system of a building would need less energy compared the one with an ever-changing temperature, which helps reduce the energy consumption of the building. This paper contributes to optimized control of indoor air temperature by implementing a dynamic exponential smoothing algorithm. The model-based predictive control in this research successfully combines dynamic smoothing coefficient with incremental PID control algorithm in the control of the air conditioner.
3.1. Predicting Temperature Changes: Forecasting Model Using Exponential Smoothing Method
Exponential smoothing method (ESM) is an experimental technique for time series analysis and prediction (TSPA) [
49]. The ESM used in this research is to forecast the temperature at
moment based on collected temperature data. This research uses triple exponential smoothing algorithm to precisely catch the trend of temperature changes [
49,
50]. The following sections discuss single, double and triple exponential smoothing algorithms.
3.1.1. Single ESM Algorithm and Temperature Prediction
Equation (1) shows the single or first-order exponential smoothing (ESM) algorithm, which is the simplest scheme in ESM. It is suitable for the prediction of time series without trend patterns. The result of Equation (1) is a single exponential smoothing (SES) value. The function displays data in a horizontal pattern. Its use is limited to time series data with stationary characteristics.
is the forecast temperature value of time period t.
is the collected temperature time series from real-world buildings.
is a smoothing coefficient,
. The superscript
means the first order in exponential smoothing algorithm.
is the exponential smoothing value of period
. When
, the initial value of
is the average of the latest 3 temperature values observed before the period 0.
is the instantaneous temperature value at period
, which refers to the time interval of temperature collection. Usually the time interval is 5 min [
49,
50]. Based on Equation (1), Equation (2) shows the temperature prediction. The exponential smoothing value
is used as the prediction value for t + 1 period.
3.1.2. Double ESM Algorithm and Temperature Prediction
Double ESM calculates the trend pattern of temperatures. It is suitable for the prediction of linear time series. Equation (3) calculates the forecast temperature value of
at time t using double ESM.
where
is the value of single ESM calculated in Equation (1). Indoor temperature changes frequently and in non-linear patterns. Because of this characteristic, double ESM can be used to predict temperature in a relatively short time period. When the temperature time series
with a straight line trend, similar to the trend of moving average method, can be represented by a linear trend model as Equation (4),
where
are calculated as follows [
49]:
3.1.3. Triple ESM Algorithm and Temperature Prediction
Equation (5) shows the function of triple ESM.
In essence, triple ESM is a quadratic polynomial exponential smoothing function [
51]. It is transformed from a linear exponential smoothing method to a non-linear quadratic polynomial exponential smoothing method [
34]. It is ideal for describing the characteristics of nonlinear changes of loads and temperatures. Using the same transformation process as for Equation (4), Equation (5) can be rewritten as Equation (6).
where
is the prediction period,
;
In Equations (1), (3) and (5), the smoothing coefficient
reflects the influence of the measured data on the predicted values. The greater is the value of
, the larger is the effect. Meanwhile, the smaller is the deviation between the measured value and the predicted value, the higher is the accuracy of the prediction. Therefore, it is possible to obtain
by calculating the squared sum of the deviations of multiple predicted values [
51]. Equation (7) shows the formula for calculating the sum of squared deviations.
where
is the count of predicted temperatures;
represents the temperature predicted at the moment of
; and
is the measured temperature at the moment of t.
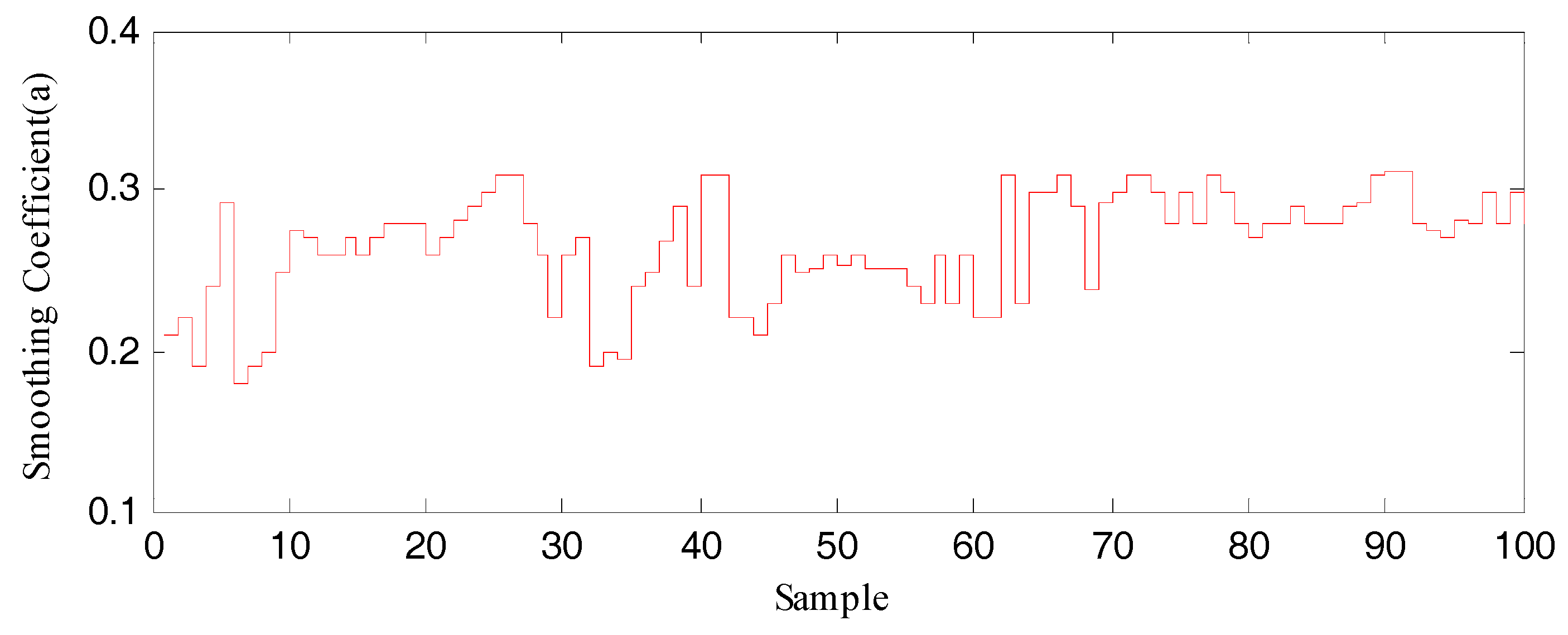
3.2. Dynamic Exponential Smoothing Optimization Algorithm
Usually, the smoothing coefficient
of an ESM for forecasting is a static parameter based on experience [
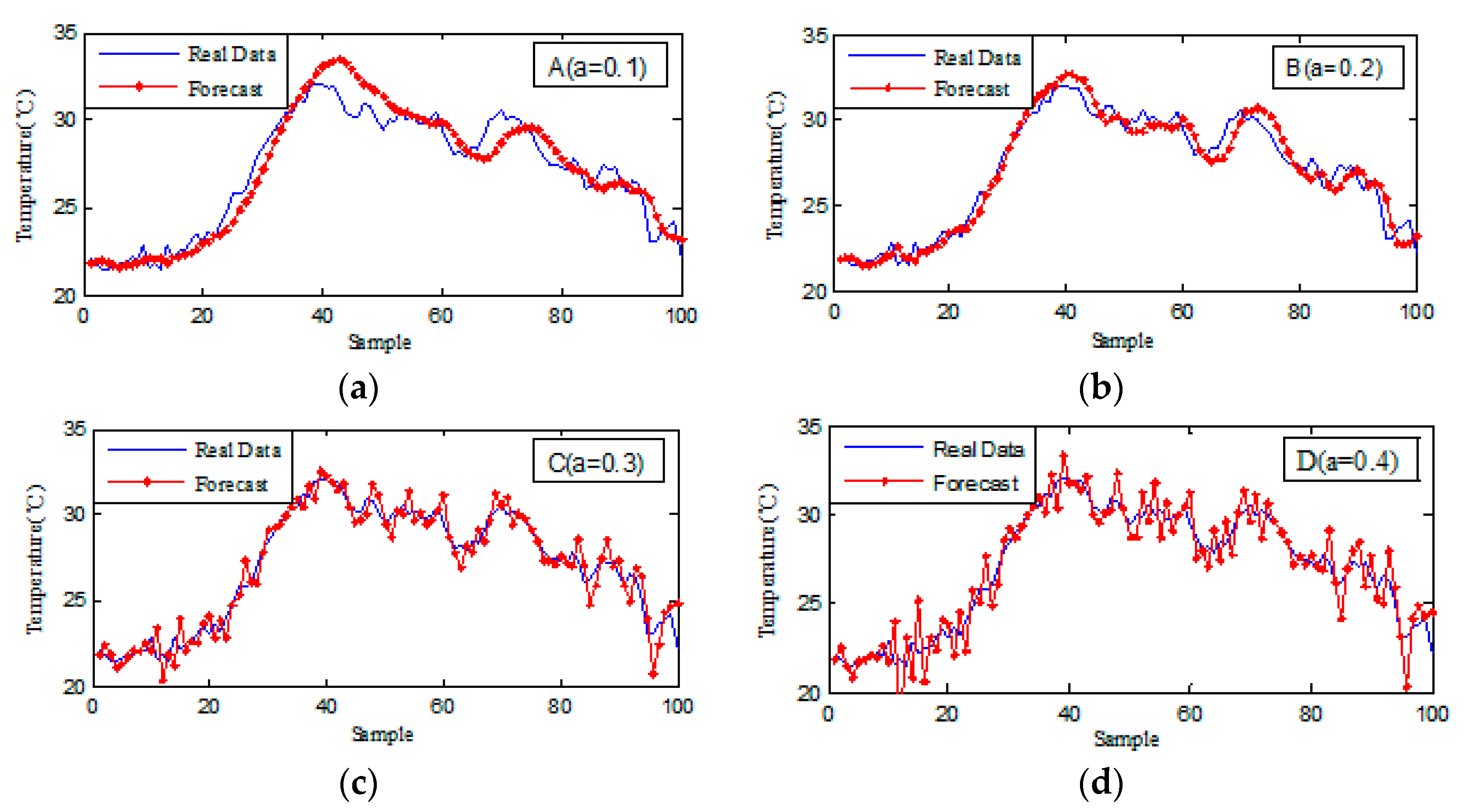
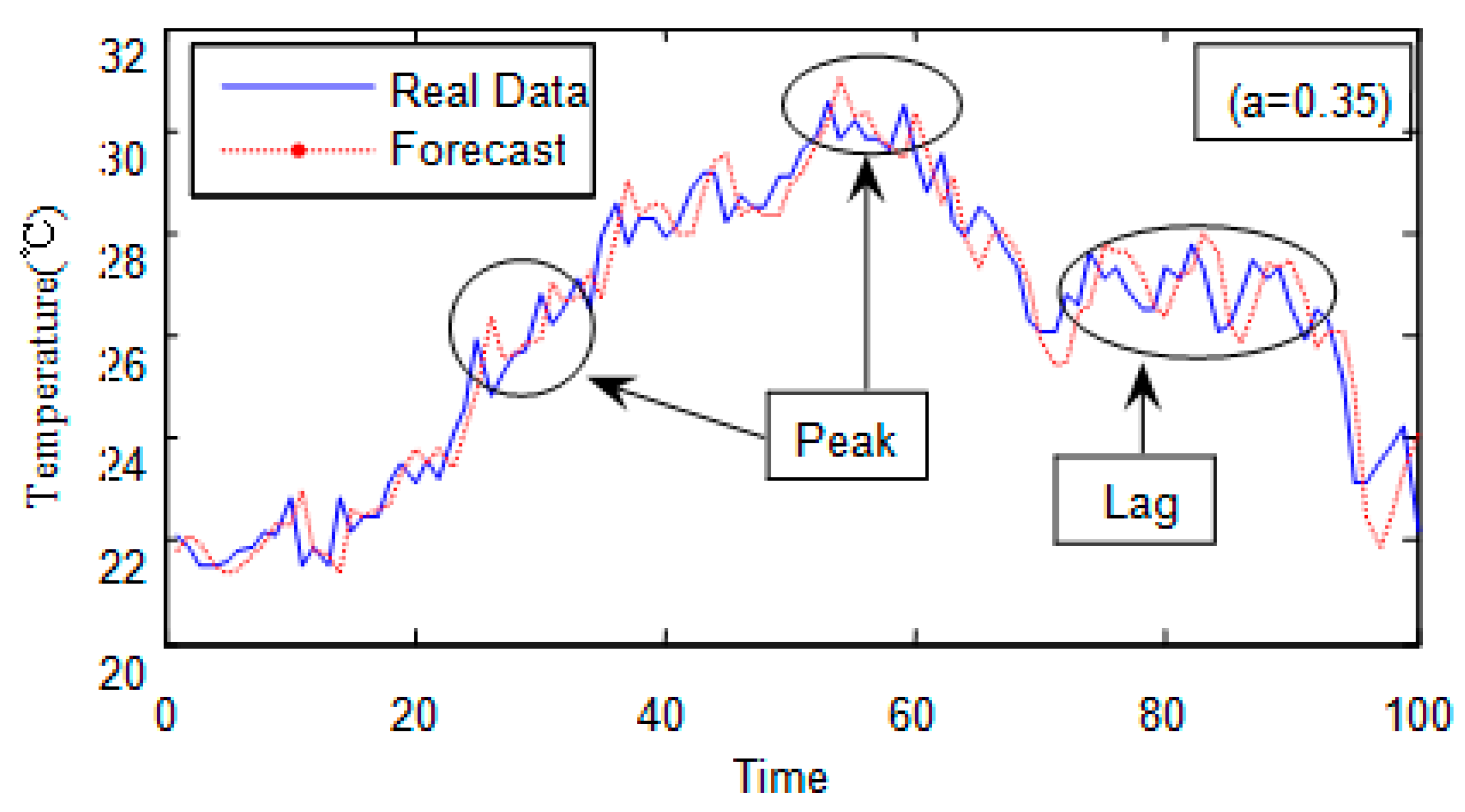
51]. However, the temperatures in a building usually have changes. It is difficult to adapt to temperature changes with empirical measured values and static parameters only. Based on practical experience, if a time series has obvious tendency to change, the smoothing coefficient
should take a large value [
51]. According to empirical studies and lab experiments [
52], usually the value range is
. If the time series changes slowly, the smoothing coefficient
would be a small value with the range of
. If the time series has irregular fluctuations and the long-term trend is approximately a stable constant, the smoothing coefficient
is generally very small with the value range of
. To precisely predict dynamic temperature changes, this paper uses the correlation analysis to determine the smoothness of time series data and dynamically selects smoothing coefficient parameters, to optimize the temperature prediction method of exponential smoothing.
Each element
in the series
is a random variable. Its expectation can be expressed as Equation (8):
Equation (9) calculates the variance to measure the discrepancy of the time series between collected data and predicted values:
Equation (10) defines the covariance between the two time series
and
of the
-th period:
Therefore, Equation (11) defines the correlation function of time series:
Equation (12) calculates the variance of a stationary time series when it is a constant:
Thus , when , .
The following steps show the determination method of the smoothness of a time series using the correlation function.
For the values in the time series starting at a point of time
, calculate the correlation coefficient of
, where
, and
is the size of the series
. The constant parameter M is the modified length of the time series for correlation calculation. It is used to define the length of the time series. The calculation of M is based on empirical experiments or observations [
49,
52].
Calculate the percentages of , in the number of M.
Depending on whether the percentage of falls within the confidence interval and distribution in the region , determine the stability of temperature time series.
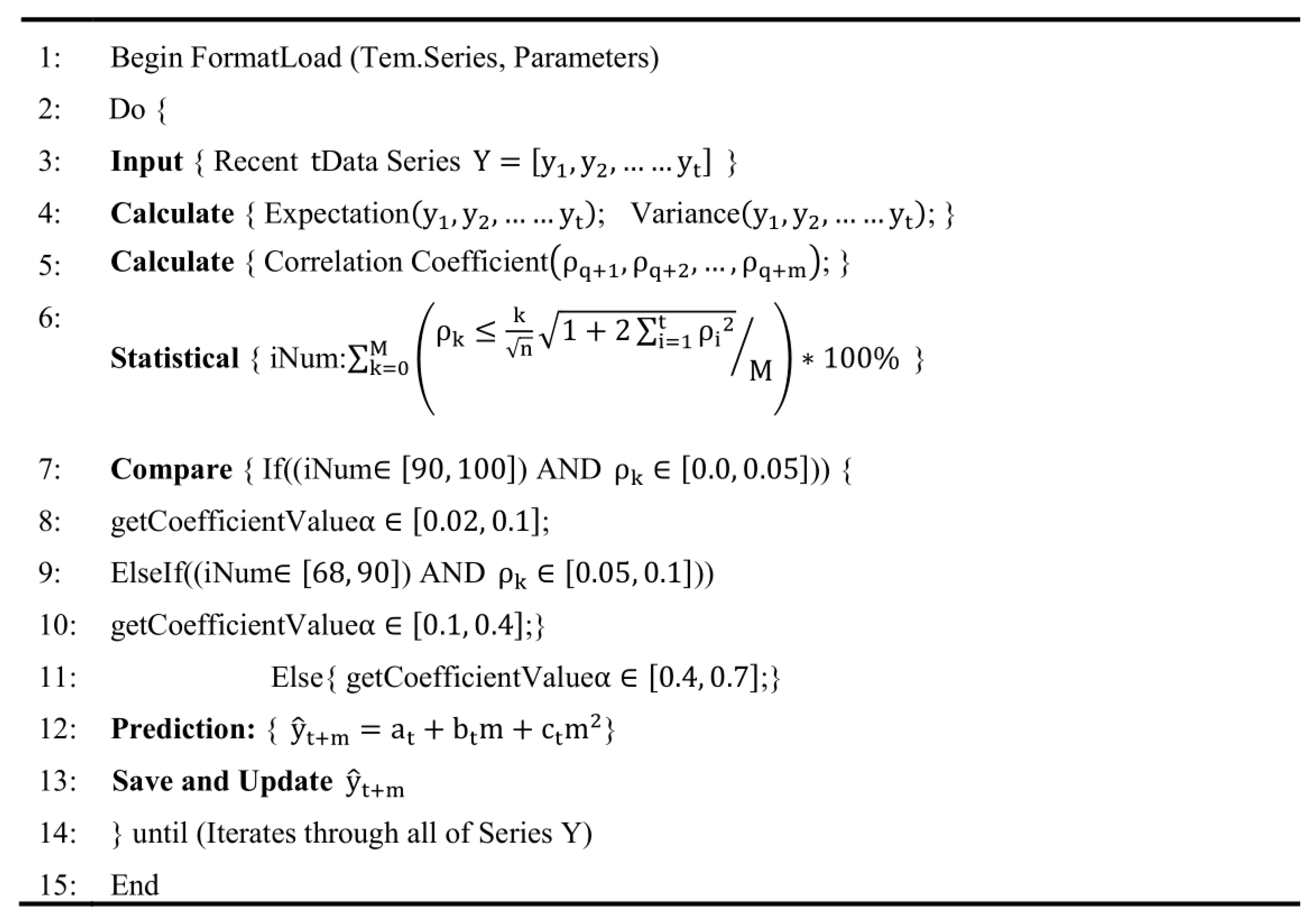
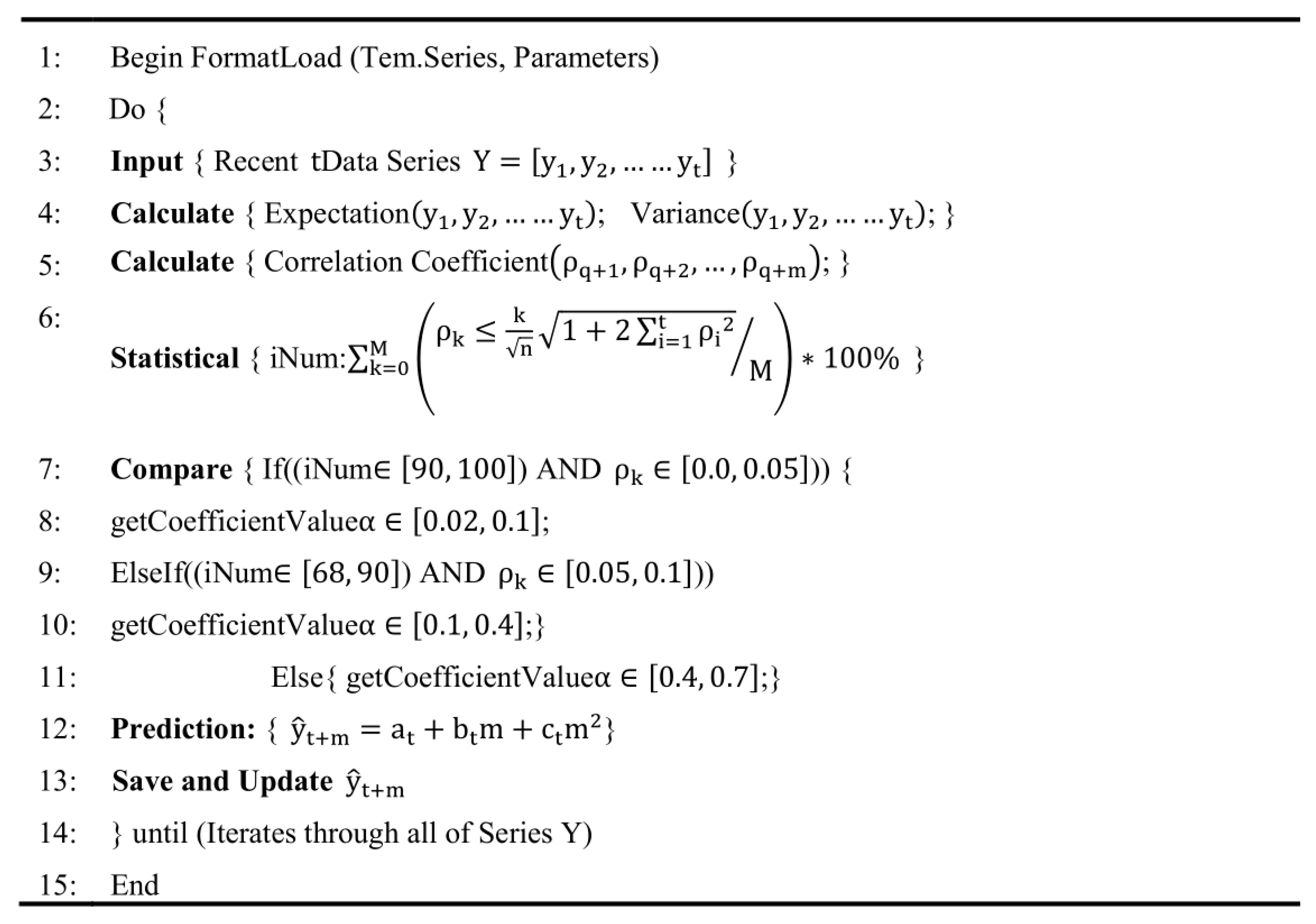
Figure 2 shows the pseudo code of prediction process using the dynamic ESM as the forecasting algorithm (or Dynamic Time-Series Prediction, DTSP). For the purpose of statistical analysis, the maximum value of n is set as 100, which will provide enough sample size for
T-test. In
Figure 2,
are used to calculate the dynamic values of
. Once the value of
is obtained, the DTSP algorithm will calculate temperature predictions using Equations (5) and (6) accordingly.
In
Figure 2, the function of “getCoefficientValue” is based on the minimum target of Squared Sum Error (SSE) expressed in Equation (7). It is rewritten in Equation (13):
where
is the collection value in the time series
; and
is the temperature prediction value based on triple ESM. This research uses steepest descent method to solve the nonlinear optimization model and sets
as the end control condition [
53,
54,
55,
56]. Since the precision of the temperature sensors used in the experiment is 0.5 °C, the end control condition is set as
. This research takes
based on empirical observation [
53,
54,
55,
56]. The calculation process is as follows:
Traverse each smoothing coefficient within a specific range , to calculate the . When a value of makes , the value is selected and the iteration calculation stops.
If for all the in the range, the algorithm finds a smoothing coefficient which minimizes the in the range. The corresponding is used as the target value.
3.3. System Verification: Prediction Model Using Multi-Source Data
Let
represent the sensor in the effective control of the air conditioner
.
is the real-time temperature acquisition value of sensor
. Using the triple ESM algorithm to predicate the indication on the sensor
,
is the temperature prediction result of sensor
in the jth
acquisition cycle. The time span of the predicted value determines the weights
of the predicted value at different cycles.
, and
. The superposition of the prediction results of j-th
cycle indicates the prediction for each sensor. Equation (14) shows how to calculate the prediction result using the temperatures of multiple acquisition cycles for each sensor.
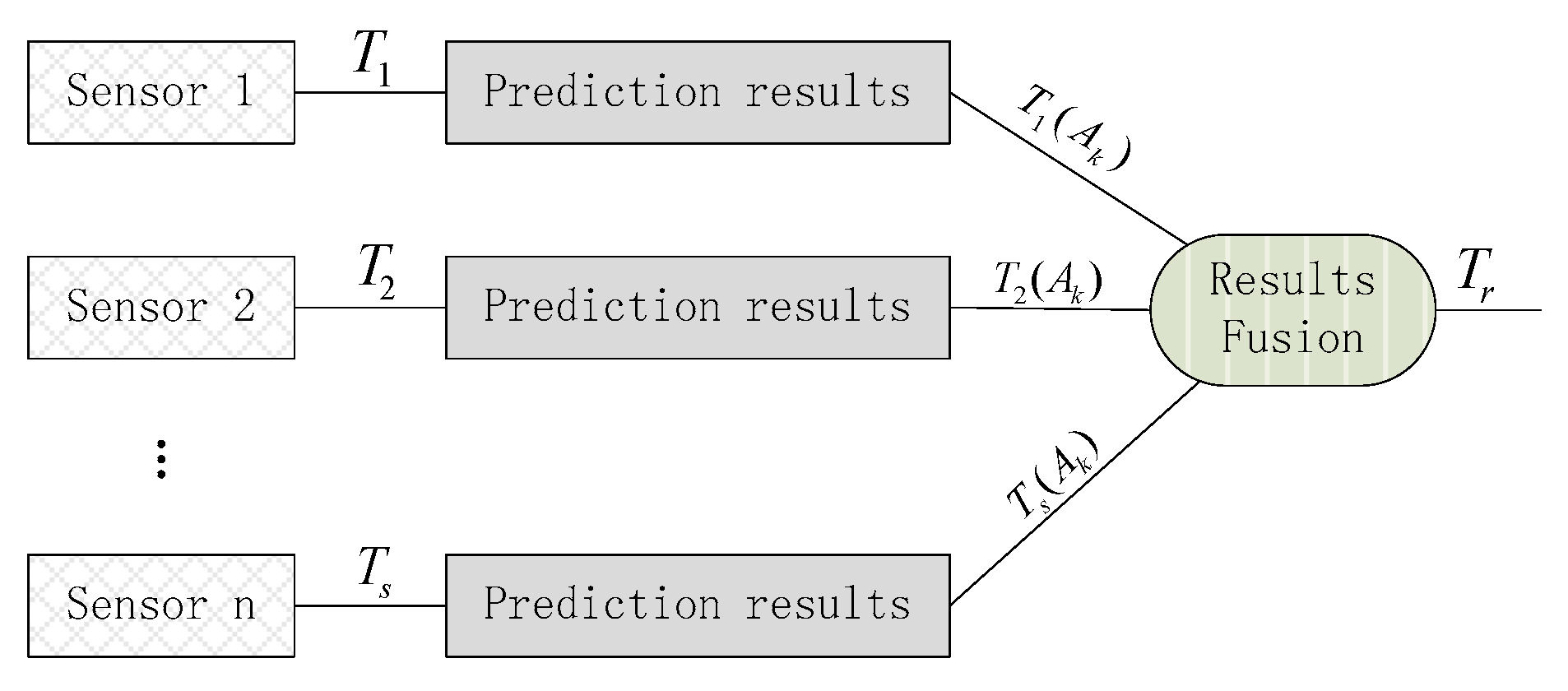
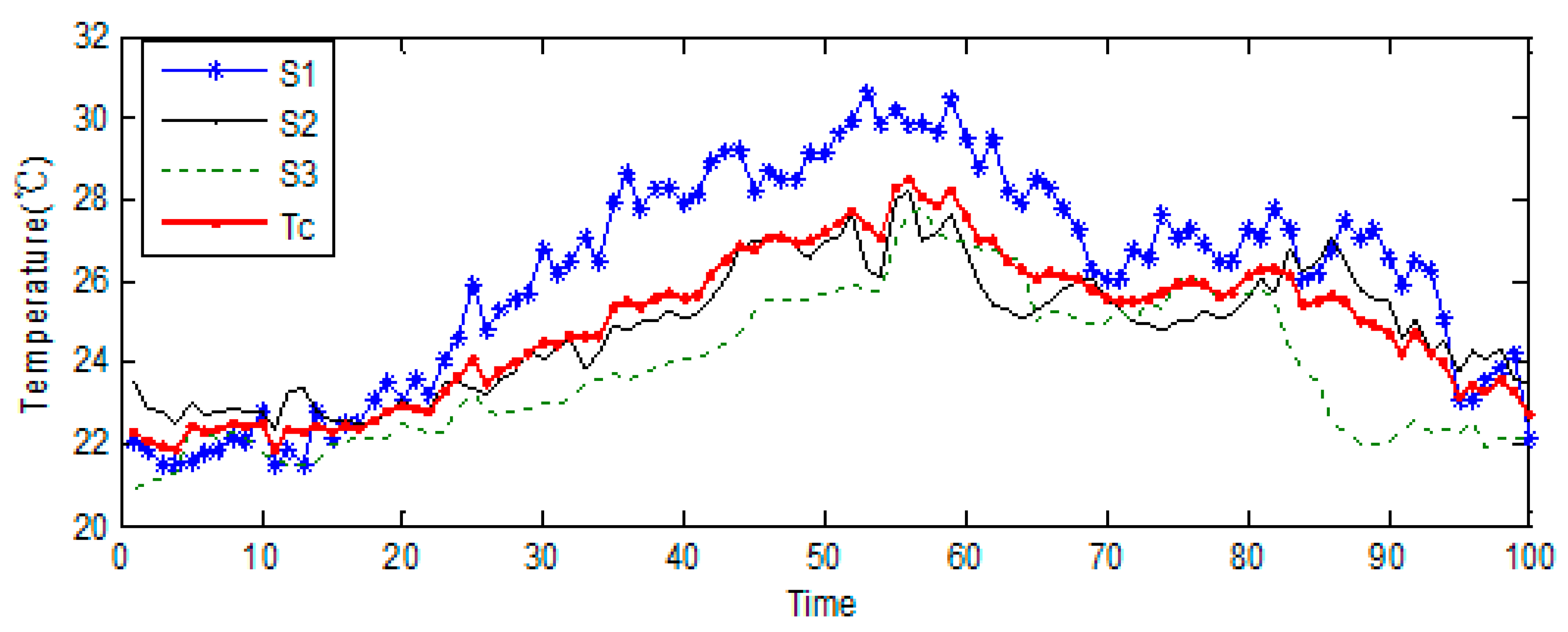
When predicting temperature, it is necessary to incorporate the prediction results of multiple sensors and select different weights for each sensor. In this study, according to the physical space relationship between air conditioners and sensors, different sensors would have different weights of
. The shorter the direct distance between a sensor and an air conditioner, the larger the weight value. The sensor which has the longest distance has the weight value of 1. After the integration of the predicted results of all the sensors, Equation (15) obtains the prediction results of the room temperatures.
Figure 3 shows the integration process of temperature predictions. Particularly, the temperature time series is regarded as stationary under the following conditions [
49,
52]: (1) when
and the correlation function
is in the confidence interval; or (2) when
,
. Otherwise, the temperature time series is regarded as not stationary. The conditions are empirical observations. In this paper, we use correlation analysis to determine whether the time series of temperature data is stable.
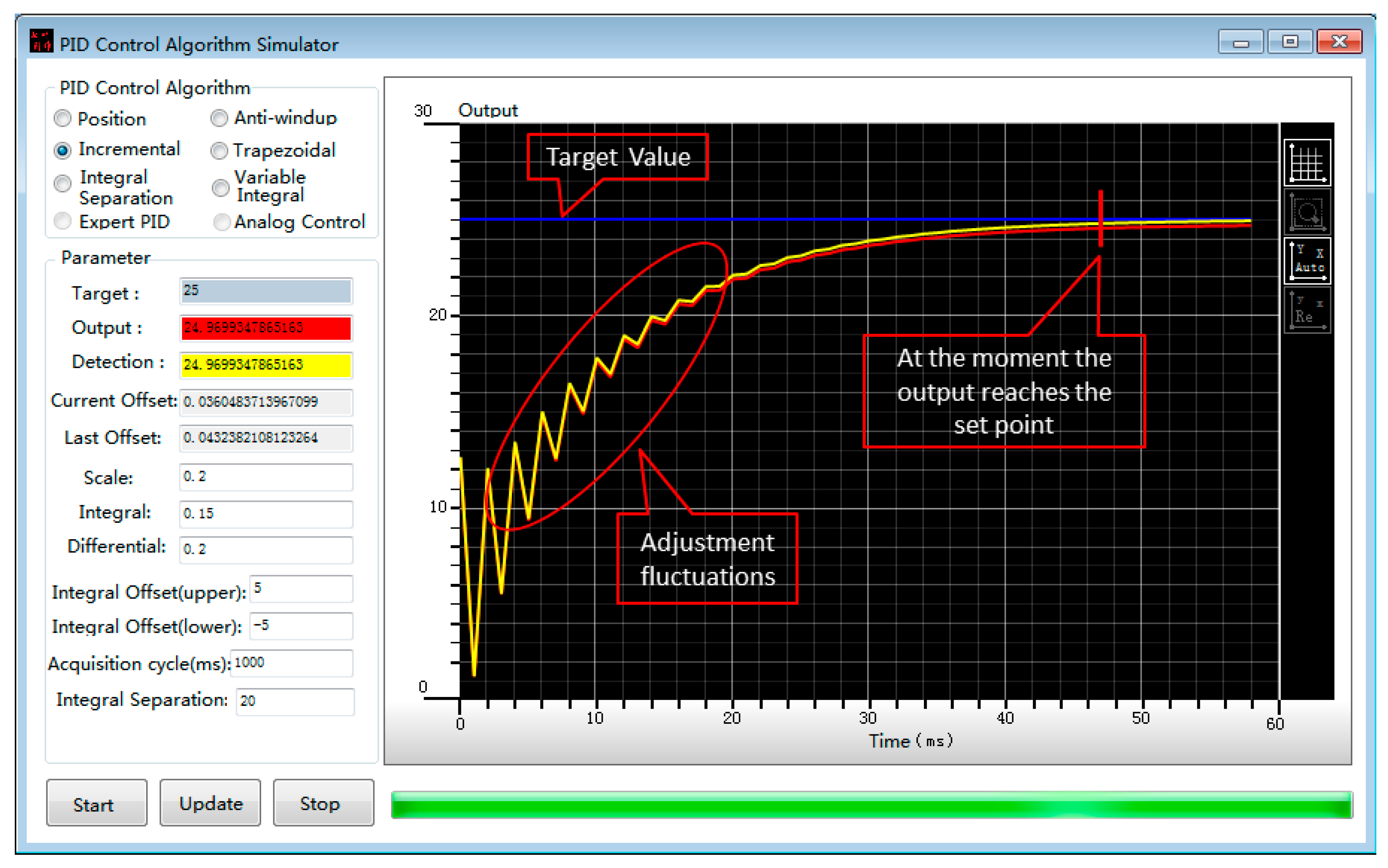
3.4. Proactive Control Method
If people only depend on the sensors of cooling systems to adjust the PID control of a building, its temperature distribution will be unbalanced. Unbalanced temperature distribution is one of the main reasons causing server downtime, especially when the temperature at a hotspot exceeds a certain limit.
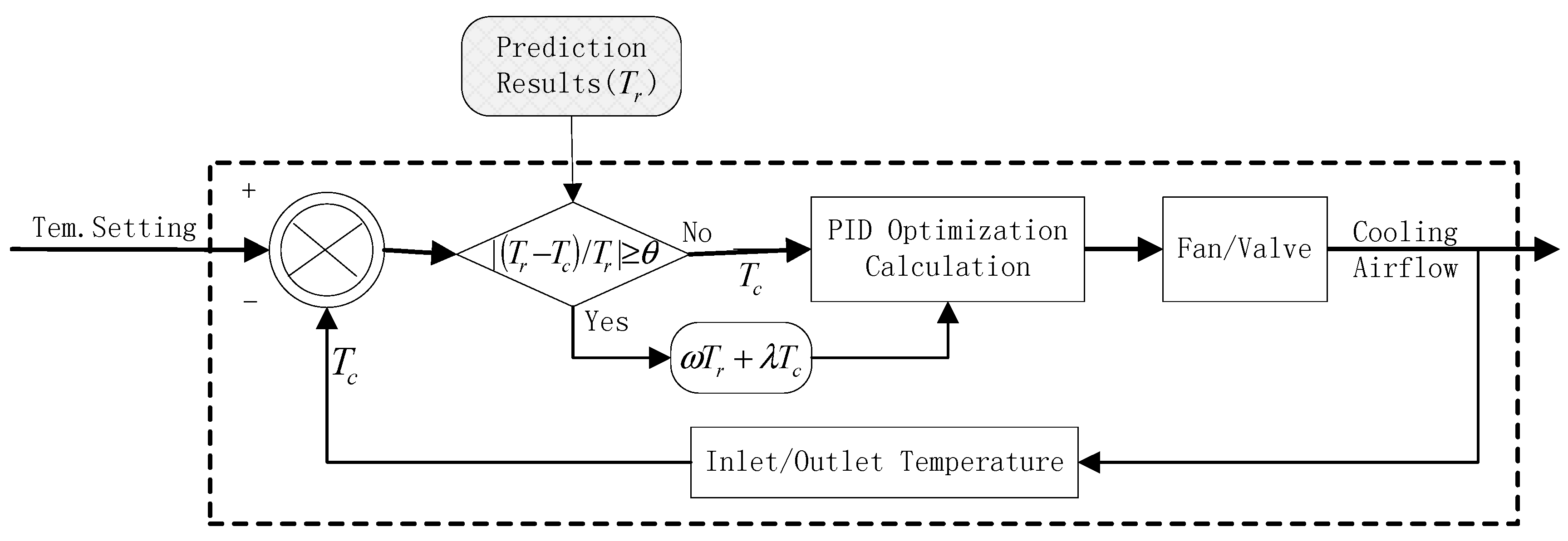
Figure 4 shows the principle of optimized control based on cooling predictions of the integrated predictive model (IPM). In
Figure 4, the load devices and the cooling devices are associated according to their proximities in the physical space. The predicted temperature of the group of cooling devices and the associated sensors would help the IPM to decide on and carry out the dynamic control on the cooling systems. As shown in
Figure 4, when
, the prediction results of temperatures
will be linked to the cooling control logic. The following definitions are for the variables in
Figure 4.
is the integration result of temperature predictions.
is the temperature value monitored by the sensors on air conditioners.
is the difference between the temperature setting and the actual temperature .
is the degree of influence of the air conditioner sensors on the PID calculation when performing PID control calculations. , .
When
, the cooling control temperature is:
; otherwise,
. The PID control of the cooling system depends on the temperature prediction by the IPM. It combines the given value
with ratio
, integral
, and derivative
of the actual output value
. It also generates control volume through linear combination. Equation (16) shows the differential equation of the cooling PID regulator.
where
Thus, Equation (17) calculates the incremental PID algorithm based on temperature control:
where
,
, and
. To improve the accuracy of PID control on cooling systems, the input filter of the cooling control value is the deviation
. It is not applied directly to the current time when calculating the differential. Instead,
is the average of cooling deviations of the samples in the past four cycles. Hence, the cooling control differentials are formed by weighted summation. Equations (18) and (19) are for the optimization of cooling control differential.
4. Experiment Design
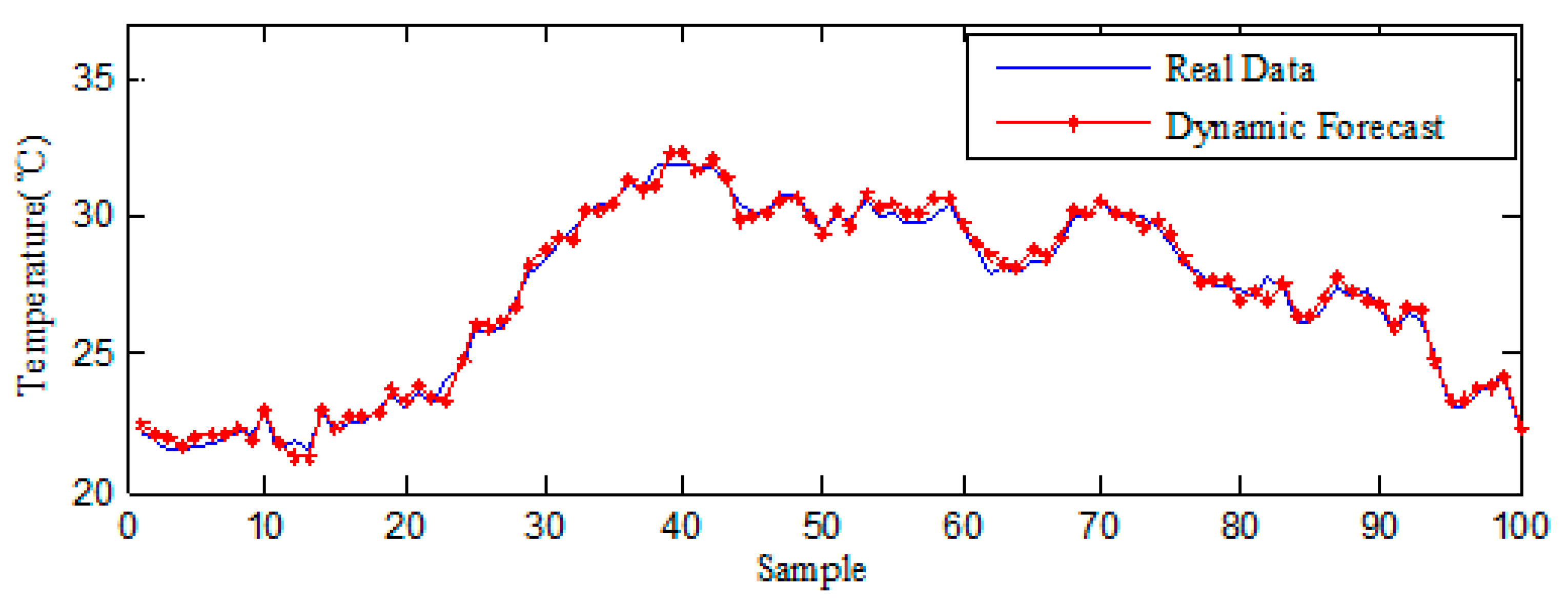
To validate the PCM-DTSP system, this research selects a data center building as the experimental data source. This is a small building located in in Shaanxi Province, China. The PCM-DTSP is implemented in the experiment building to optimize the on-demand cooling supplies and acquire actual data of the systems. The data observed on the systems are used to verify that the PCM-DTSP system is able to achieve optimized control. The research also includes random generated data to validate the temperature prediction, analyze the effectiveness of the system for temperature simulation, and statistical testing. The sampling interval is 5 min. There are 100 observations in the experiment. There are three steps in the experimental analysis.
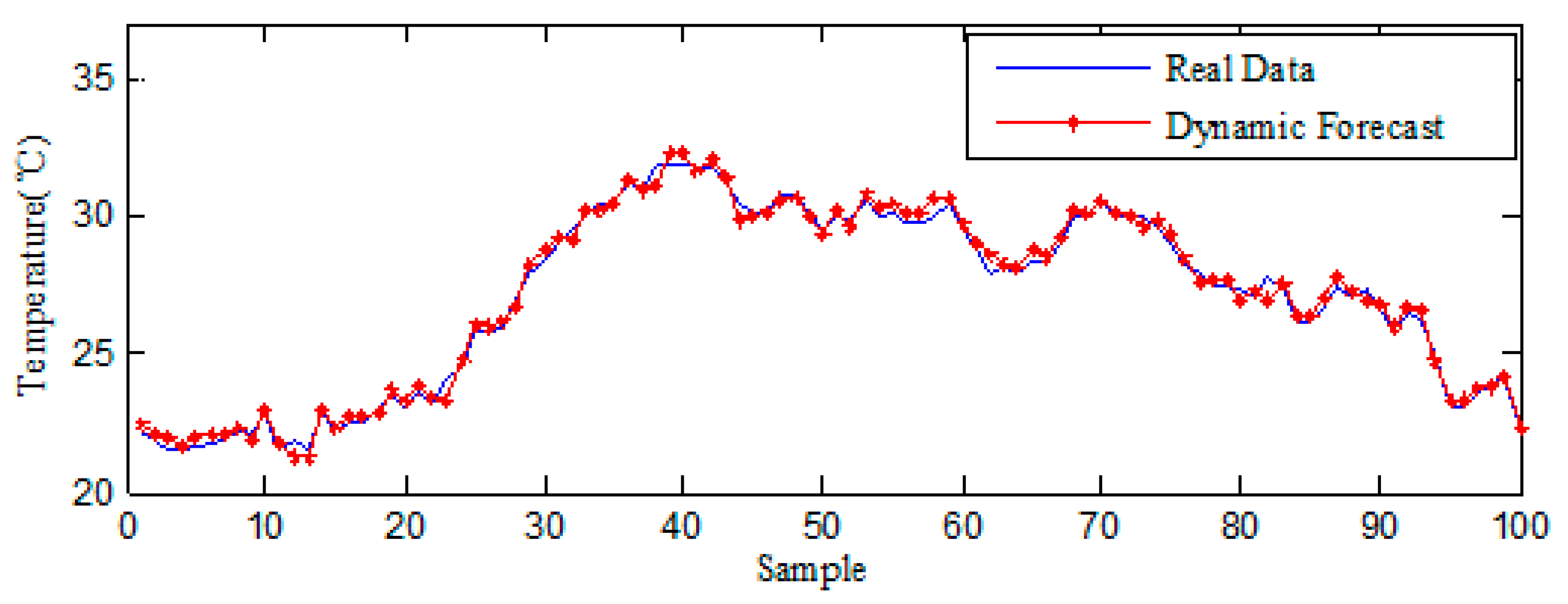
Use MATLAB 2014a simulation software (MathWorks, Natick, MA, USA) to analyze the effectiveness of temperature prediction algorithm.
Analyze the effectiveness of the PCM-DTSP system for temperature simulation.
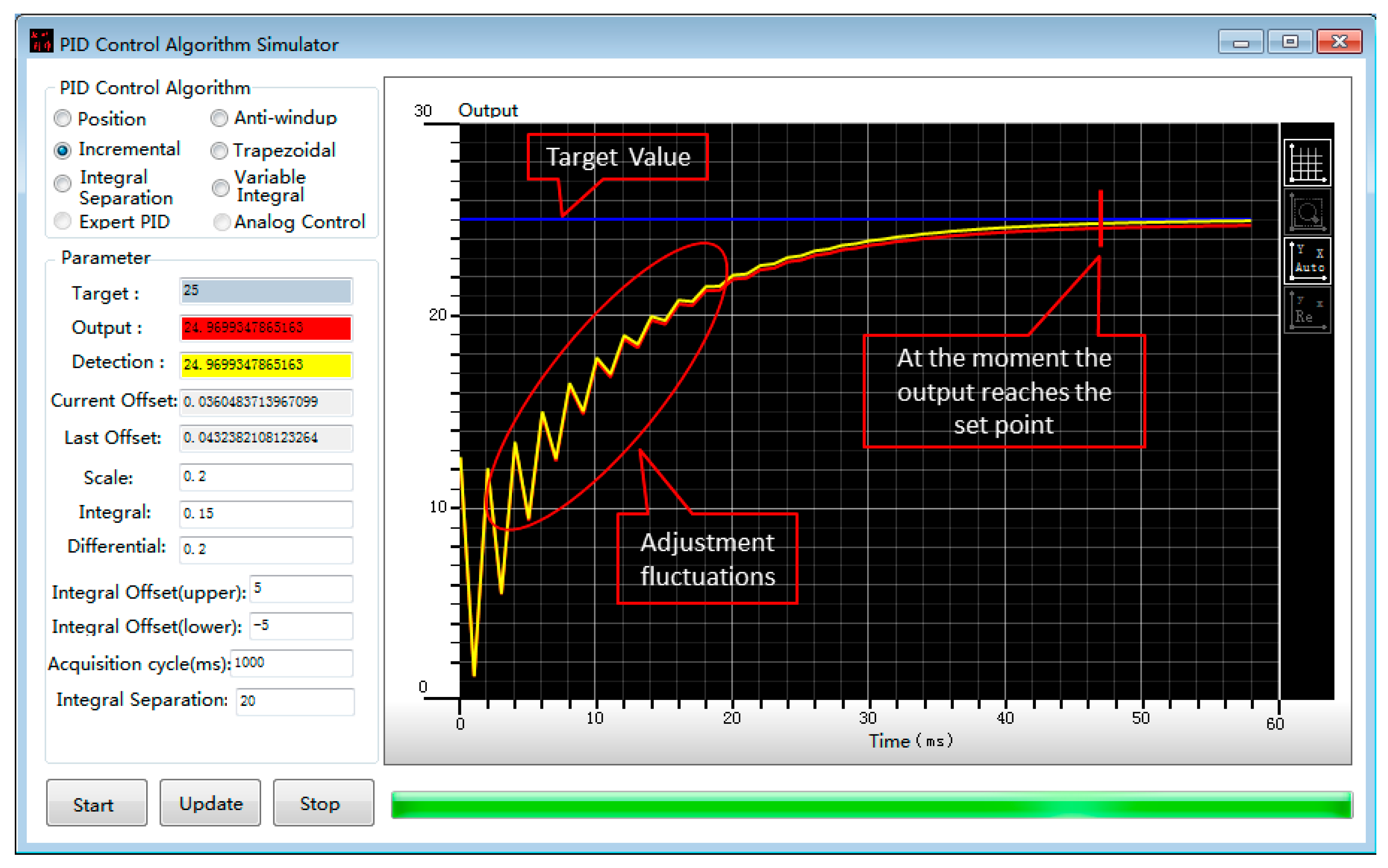
Implement the controller program for air conditioners and use the optimized controller to test, analyze, and verify the results.
The building has 11 servers and two industrial-type air conditioning (AC) cabinets. The layout of the data center building is shown in
Figure 5. The total cooling capacity (the capacity of cooling output of AC units) is 20 KW. Each AC unit has the rated power (the power consumption of an AC unit in the maximum load state) of 3.56 KW. In addition, there are one power distribution cabinet, six temperature sensors, one smart meter, and three Power Distribution Units (PDUs). The energy efficiency of an AC unit can be calculated using the above two measures by:
. The total load of a building includes the power of AC units, servers, power distribution equipment, etc. The total load of the experiment building is approximately 10.5 KW. Each unit of cooling equipment provides cold air to different server groups. The integrated prediction model in this research combines the predictions of the temperature sensors in the same server group and controls the cooling systems based on the calculated optimization results for energy consumption efficiency.
6. Conclusions
This research presents a cooling control method based on MPC. The system is a coordinated proactive control method using dynamic time series prediction (PCM-DTSP) for sustainable facilities management (SFM). By integrating prediction results and monitored environmental data, the system is able to predict temperature changes and optimize controls. The PCM-DTSP helps to automate the functions of HVAC, particularly cooling systems, for improved energy efficiency. Specifically, the model makes substantial difference in terms of improved accuracy and timeliness in predicting cooling loads. If this system becomes widely used, it would considerably help buildings save energy and maintain sustainability. The modified MPC method with dynamic ESM in this research innovatively facilitates the study of dynamic service in control systems.
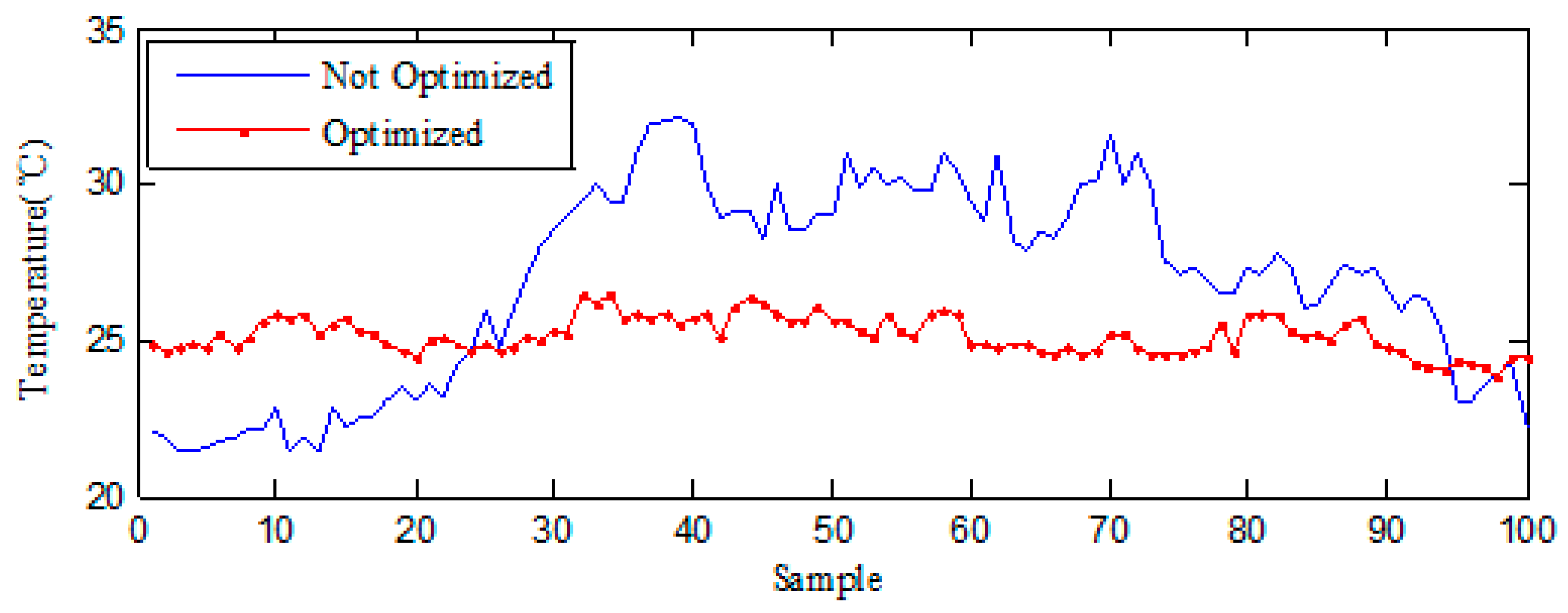
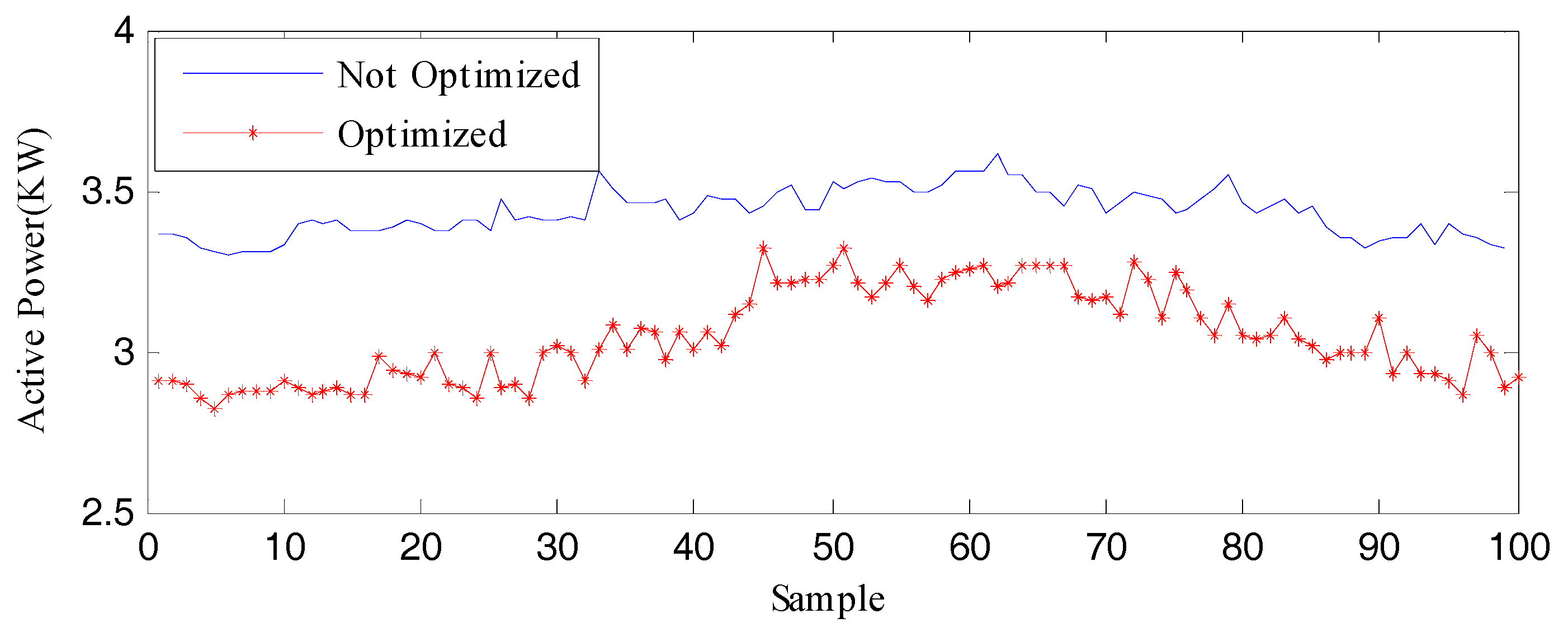
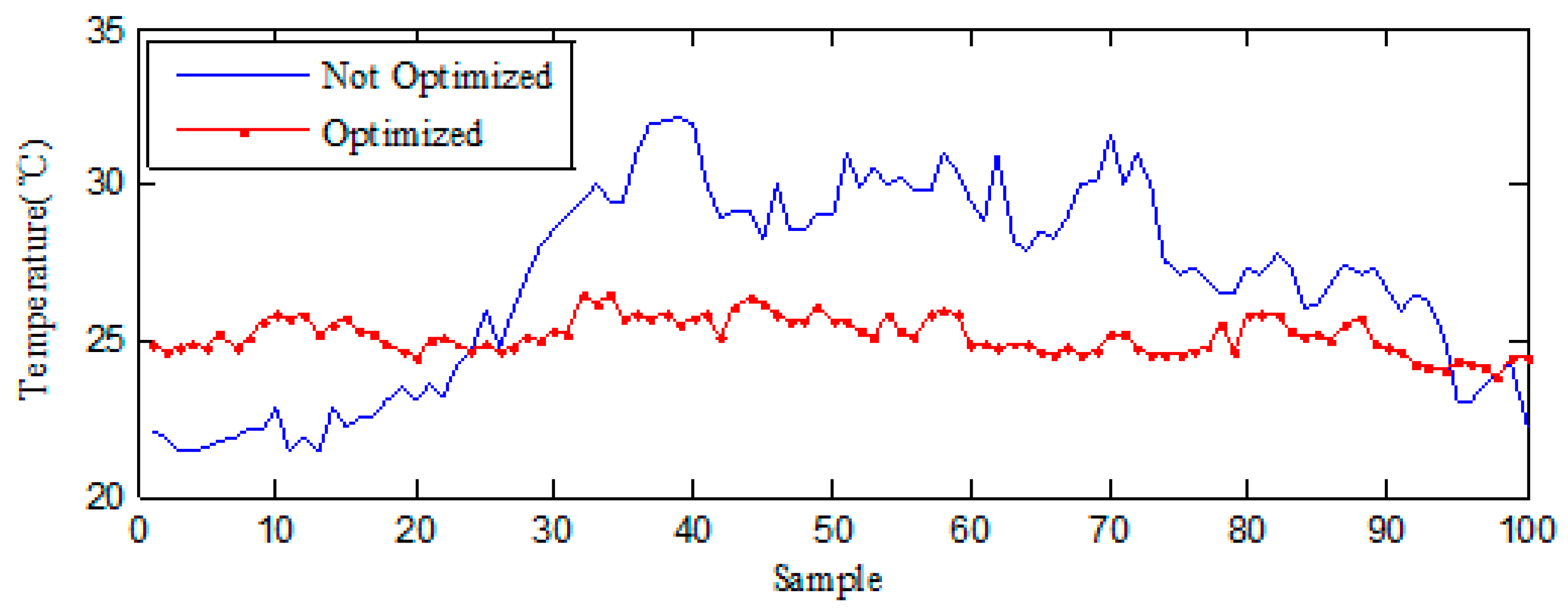
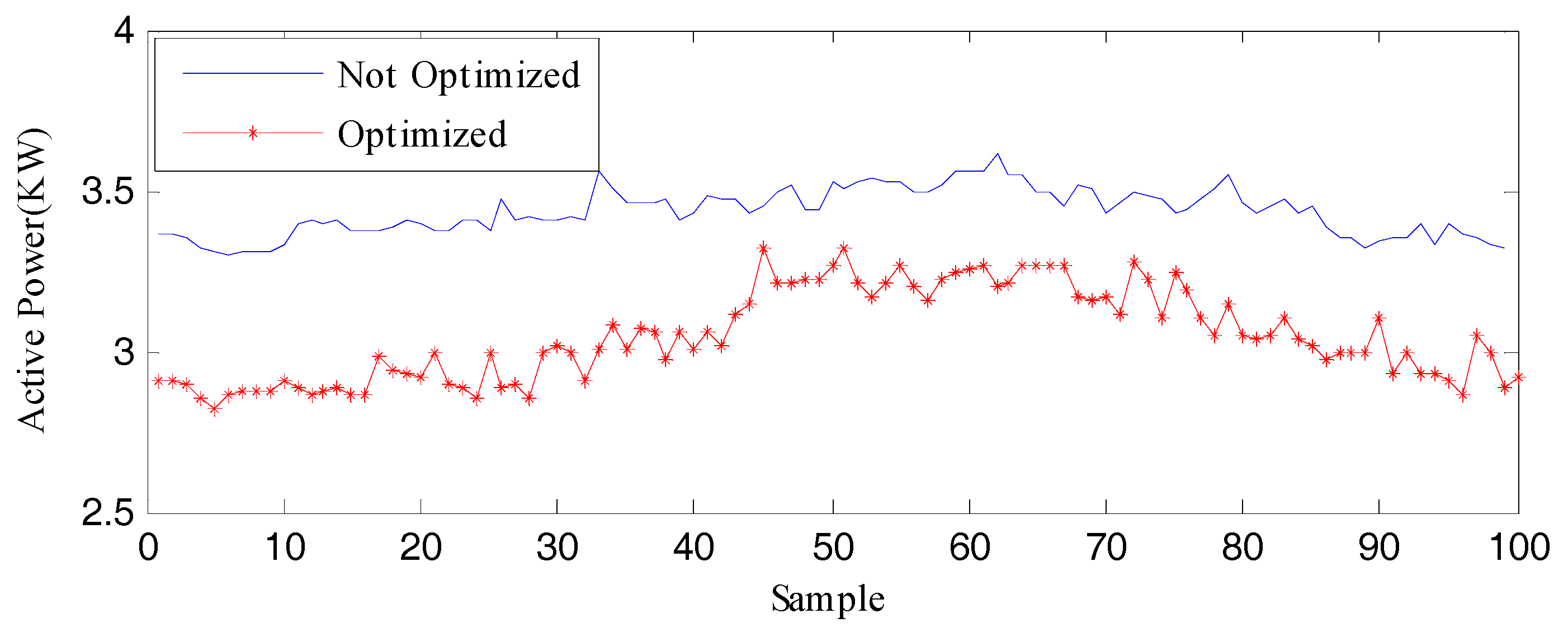
The experiment data show that the optimized cooling systems are more stable and consistent with a building’s cooling needs than the non-optimized systems. In addition, experiment tests verify that the optimized systems are able to reduce the power consumed by the cooling systems, stabilize the temperatures of the selected building, and reduce the energy consumption of the building.
However, one limitation of the control method is that its verification was performed on one building. The particular building was a closed-space modular building. The method developed in this research has potential to be used in open-space buildings. However, the thermodynamics of such a confined space should be used with caution when directly translated to other types of buildings. In future research, this dynamic ESM could be employed with machine learning to make the control of air conditioning systems more intelligent. Another possible future effort is to improve the prediction model by integrating other data sources.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}