
Comparative Analysis between Conventional PI and Fuzzy LogicPI Controllers for Indoor Benzene Concentrations


 ,
, 


Abstract
:1. Introduction
- Minimum rise time, which is the time required for the system response to rise from 10% to 90% (over damped), 5% to 95% and 0% to 100% (under damped) of the final steady-state value of the desired response.
- Minimum overshoot and the maximum overshoot is the highest peak value of the response curve measured from the desired response of the system.
- Minimum settling time, which is the time required for the response to reach and stay within 2% of its final value.
2. Process Description
3. Well-Mixed Room Model
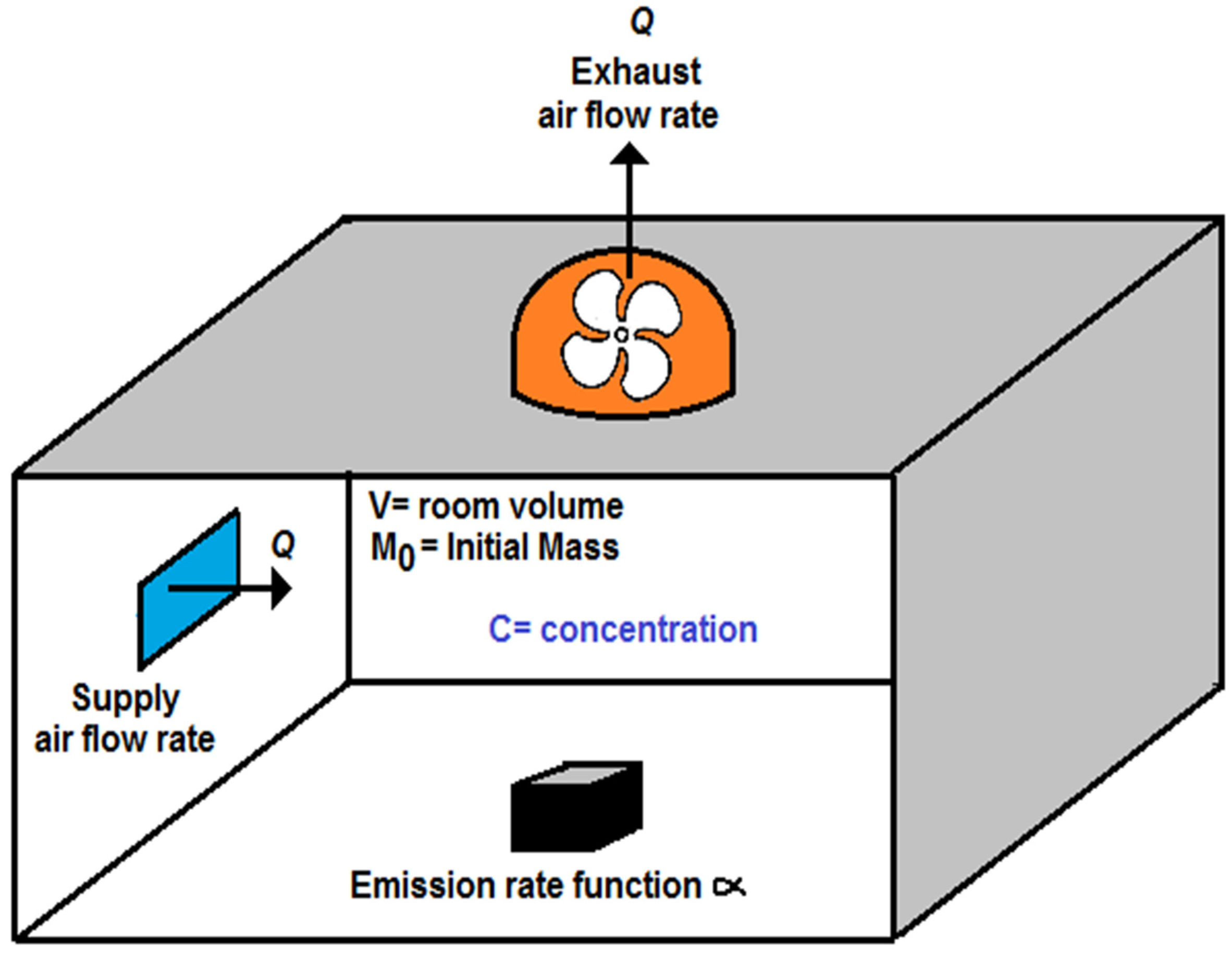
- The use of Equation (2) in Equation (1) is an adequate approximation to control the well-mixed room assuming that the time variation of Q(t) is slower compared to C(t).
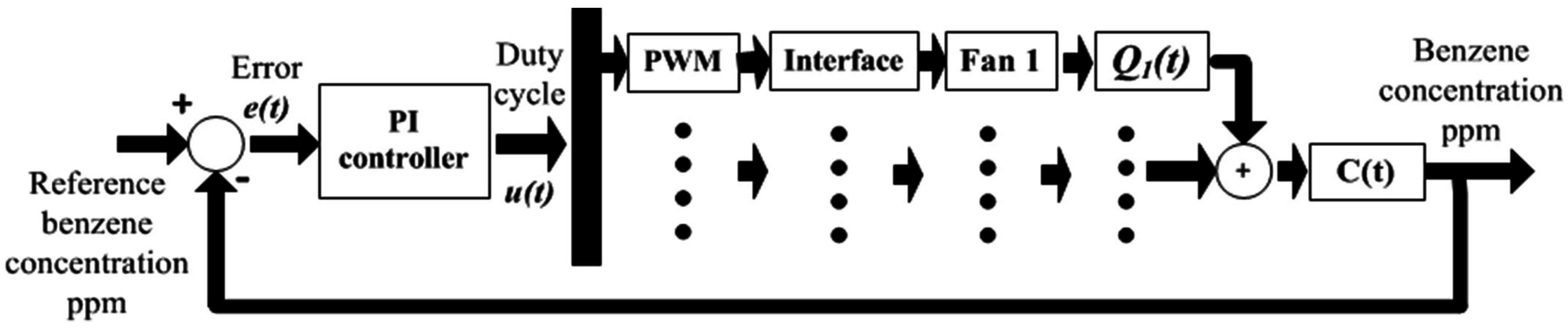
4. Proportional-Integral Control System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Gain |
|---|---|
| Kp | 3.7265 × 10−3 |
| Ki | 1.0062 |
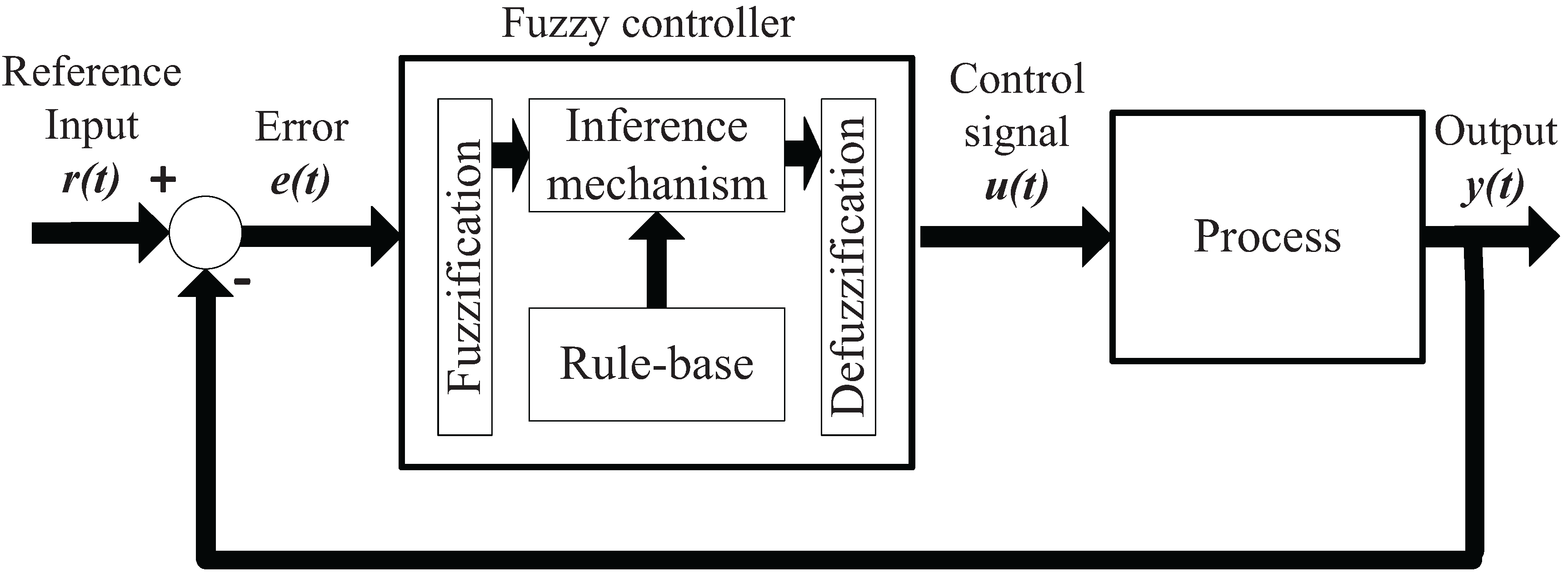
5. Fuzzy Proportional-Integral Control System
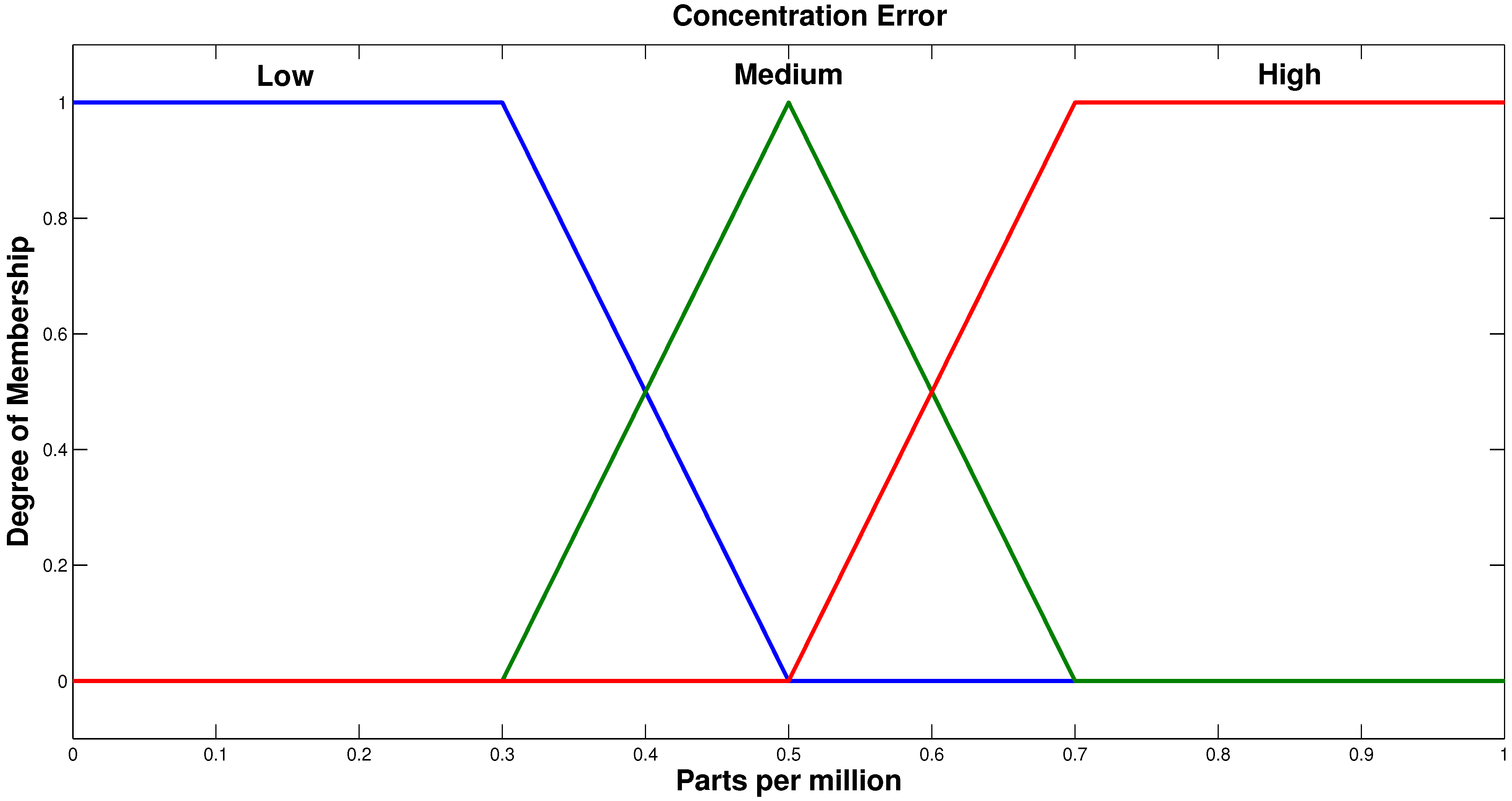
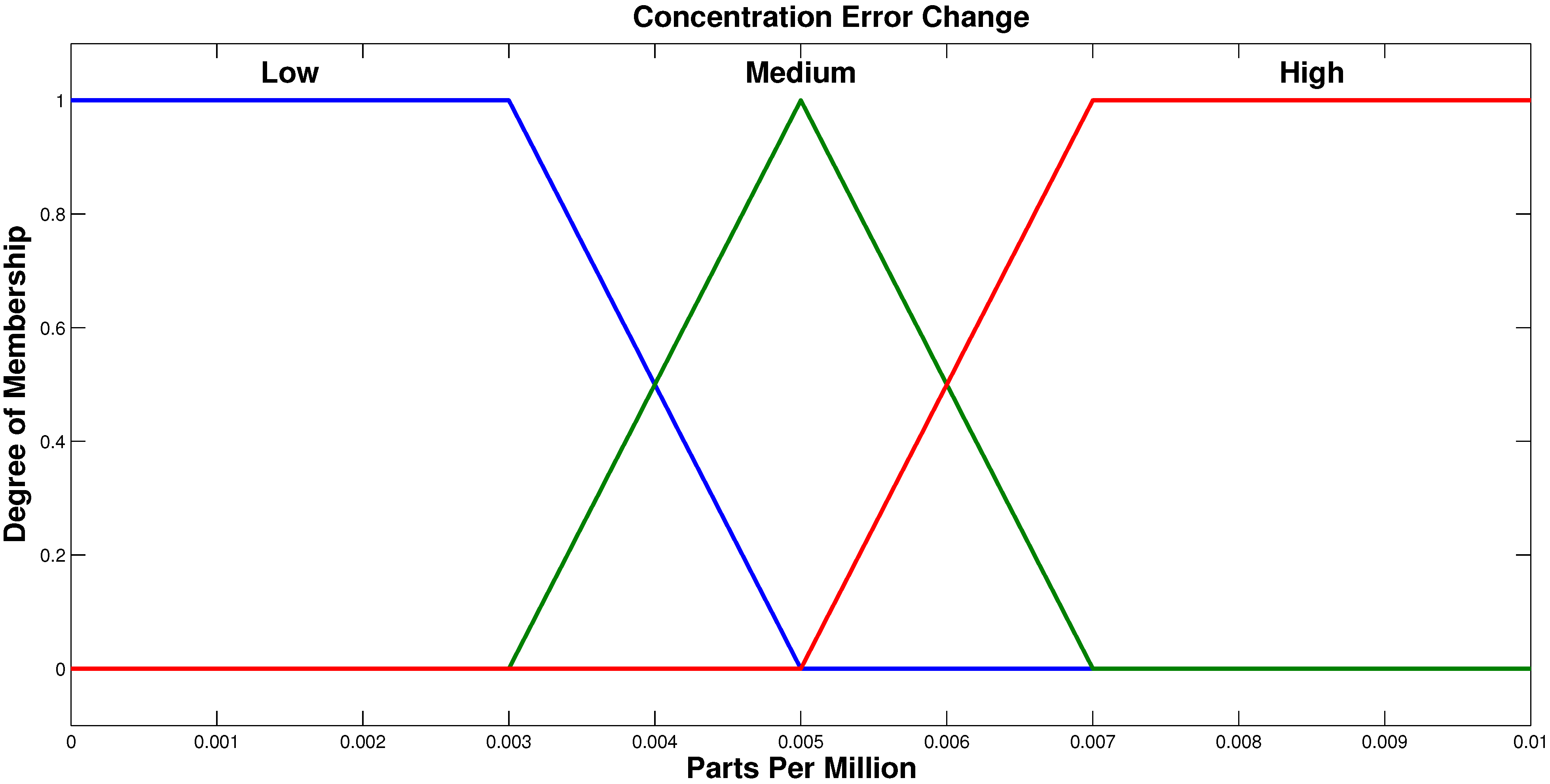
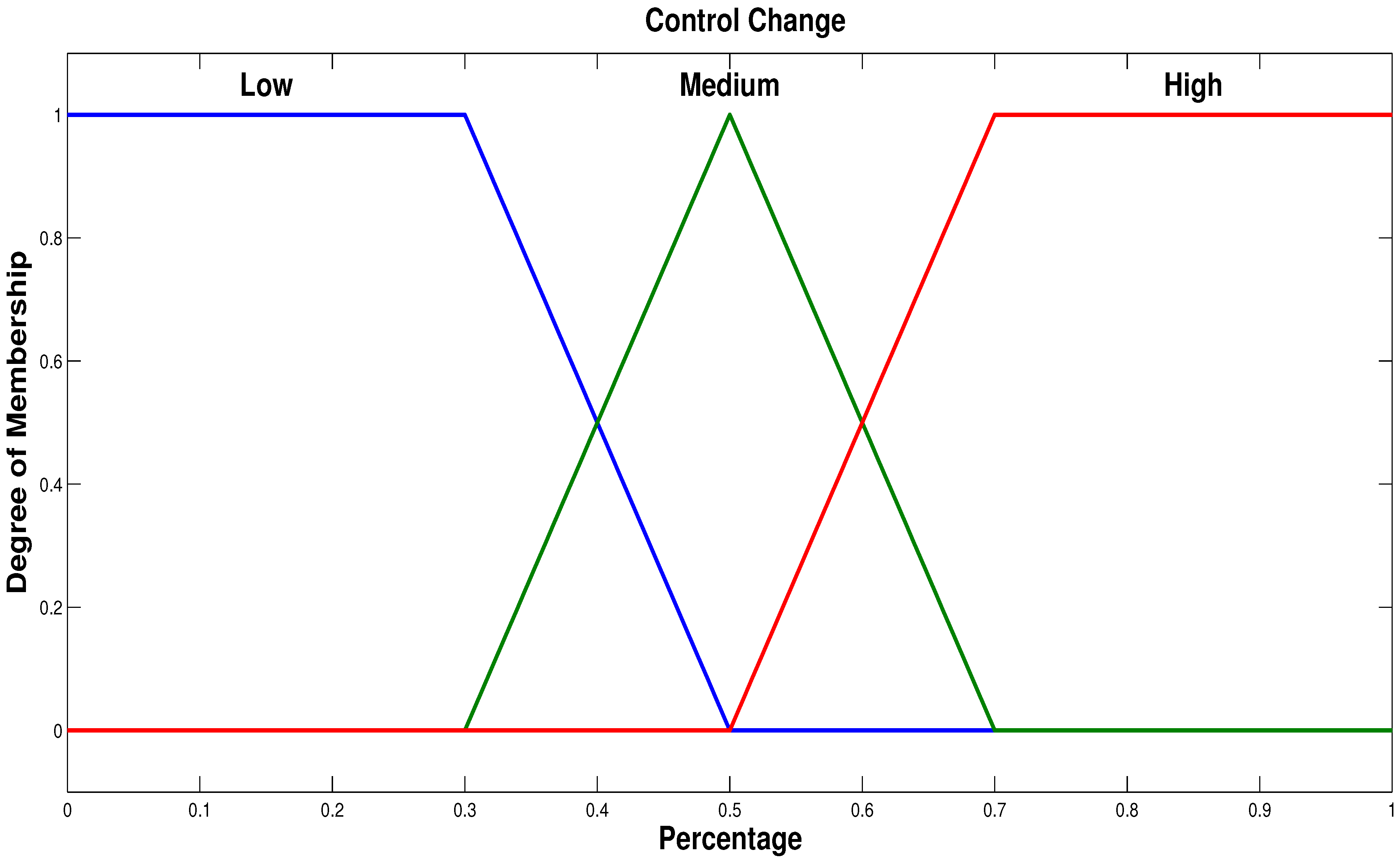
5.1. Fuzzy Logic Controller
5.2. Fuzzy PI Control Design
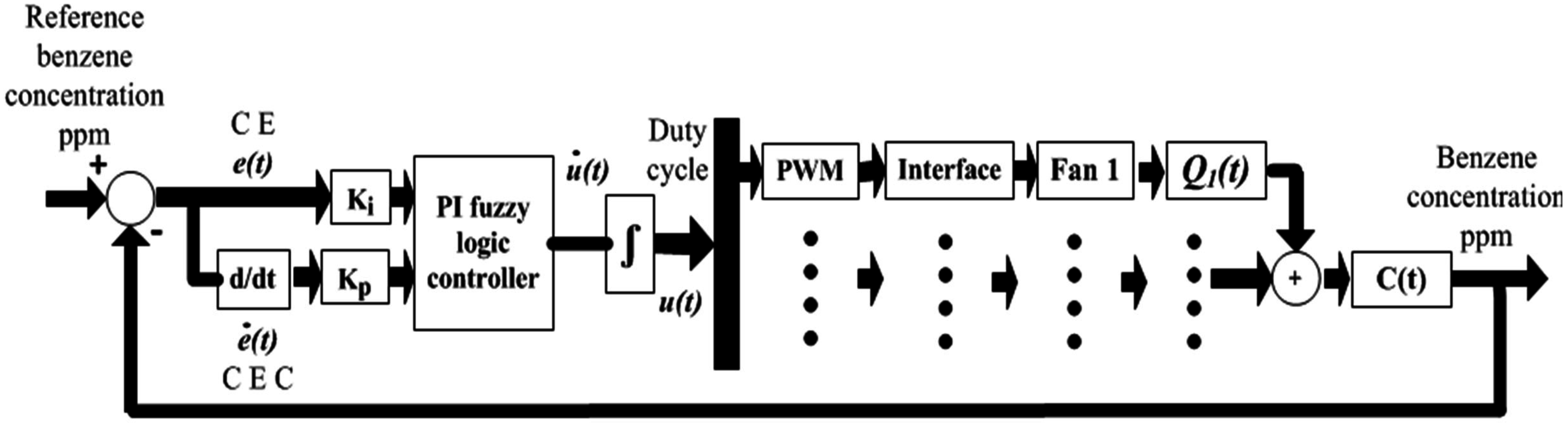
| Number | Fuzzy Rules |
|---|---|
| 1 | If concentration error is low and concentration error change is low, then control change is low |
| 2 | If concentration error is low and concentration error change is medium, then control change is medium |
| 3 | If concentration error is low and concentration error change is high, then control change is high |
| 4 | If concentration error is medium and concentration error change is low, then control change is medium |
| 5 | If concentration error is medium and concentration error change is medium, then control change is medium |
| 6 | If concentration error is medium and concentration error change is high, then control change is high |
| 7 | If concentration error is high and concentration error change is low, then control change is high |
| 8 | If concentration error is high and concentration error change is medium, then control change is high |
| 9 | If concentration error is high and concentration error change is high, then control change is high |
| CEC | Low | Medium | High | |
|---|---|---|---|---|
| CE | ||||
| Low | Low | Medium | High | |
| Medium | Medium | Medium | High | |
| High | High | High | High | |
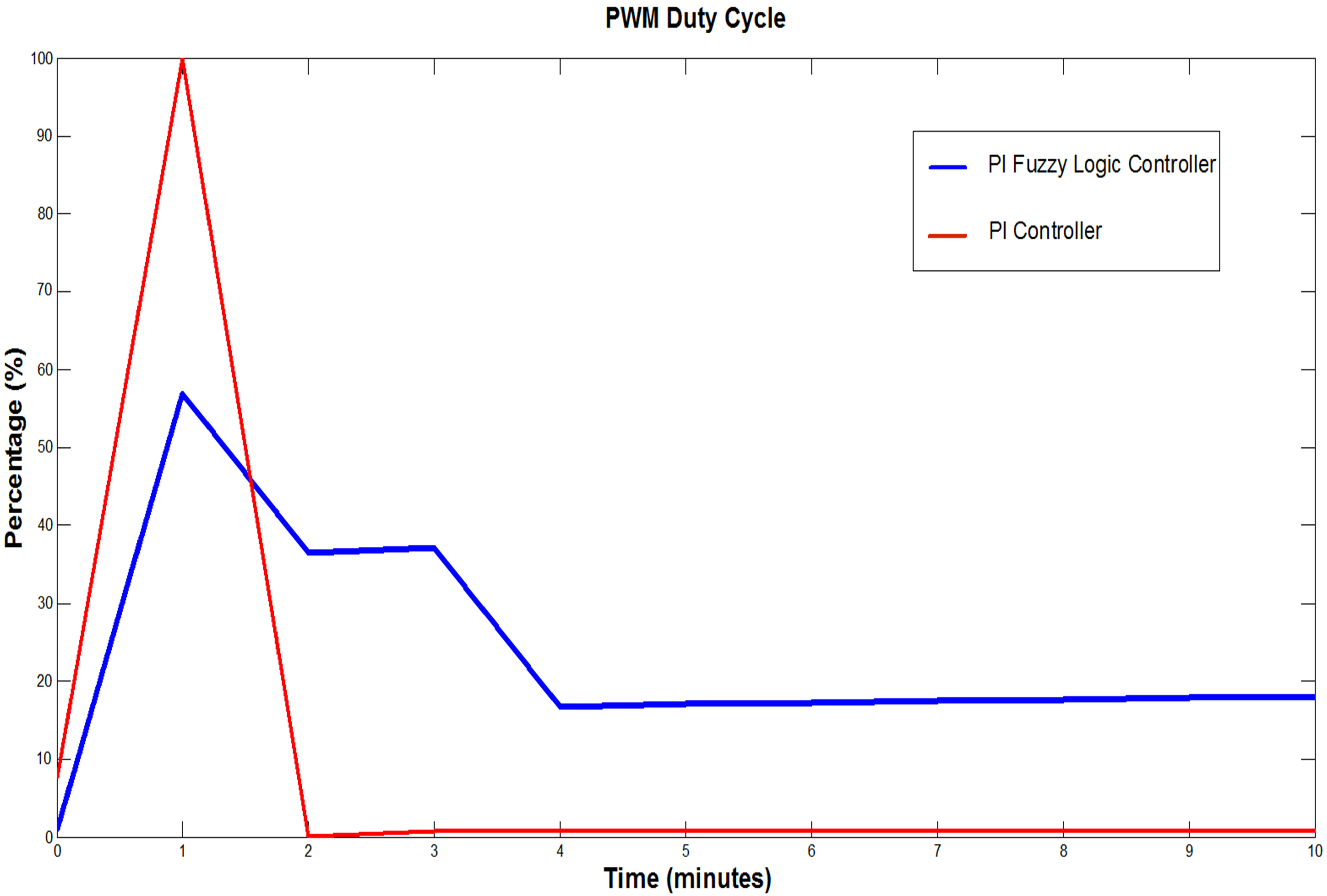
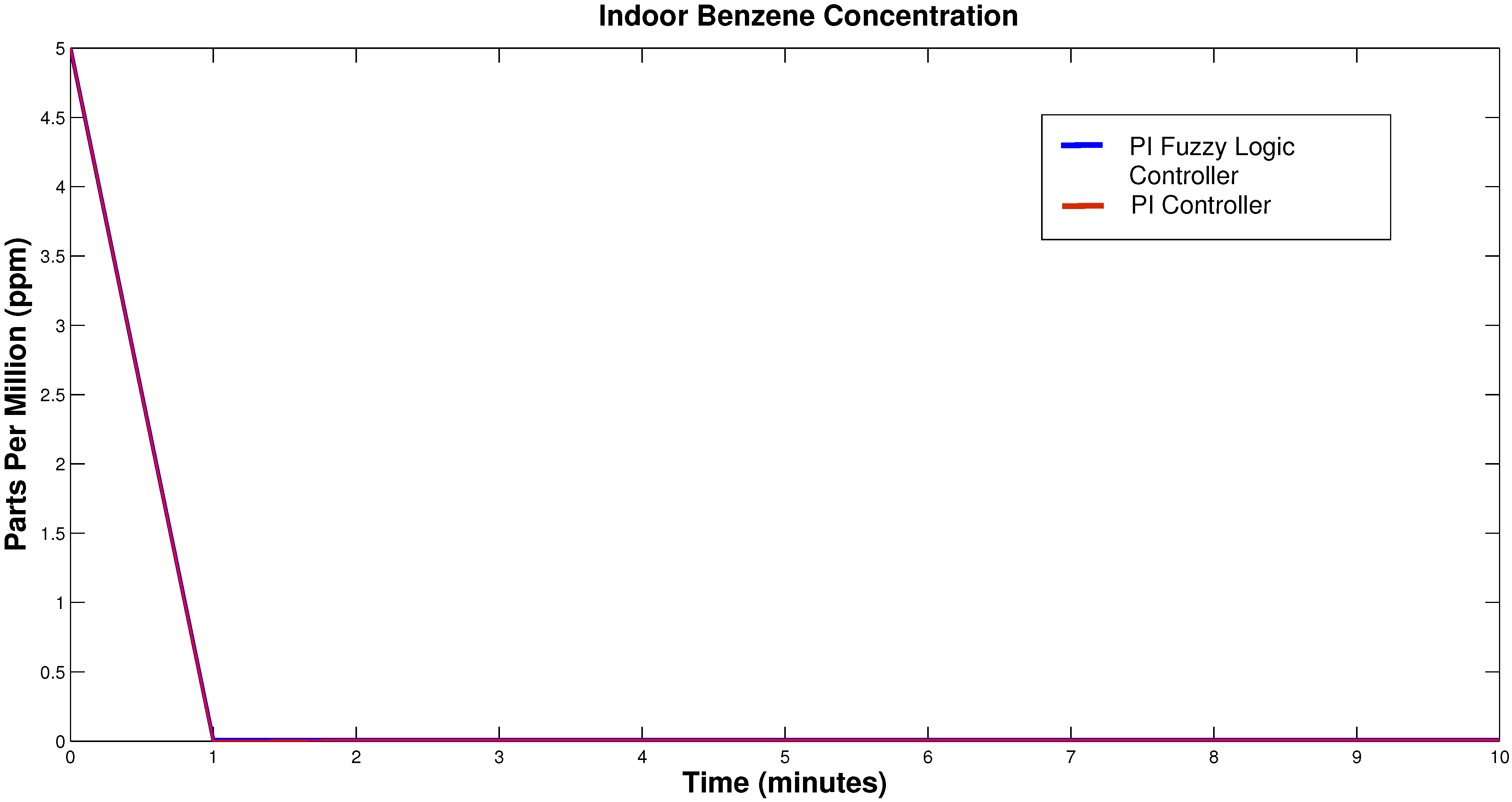
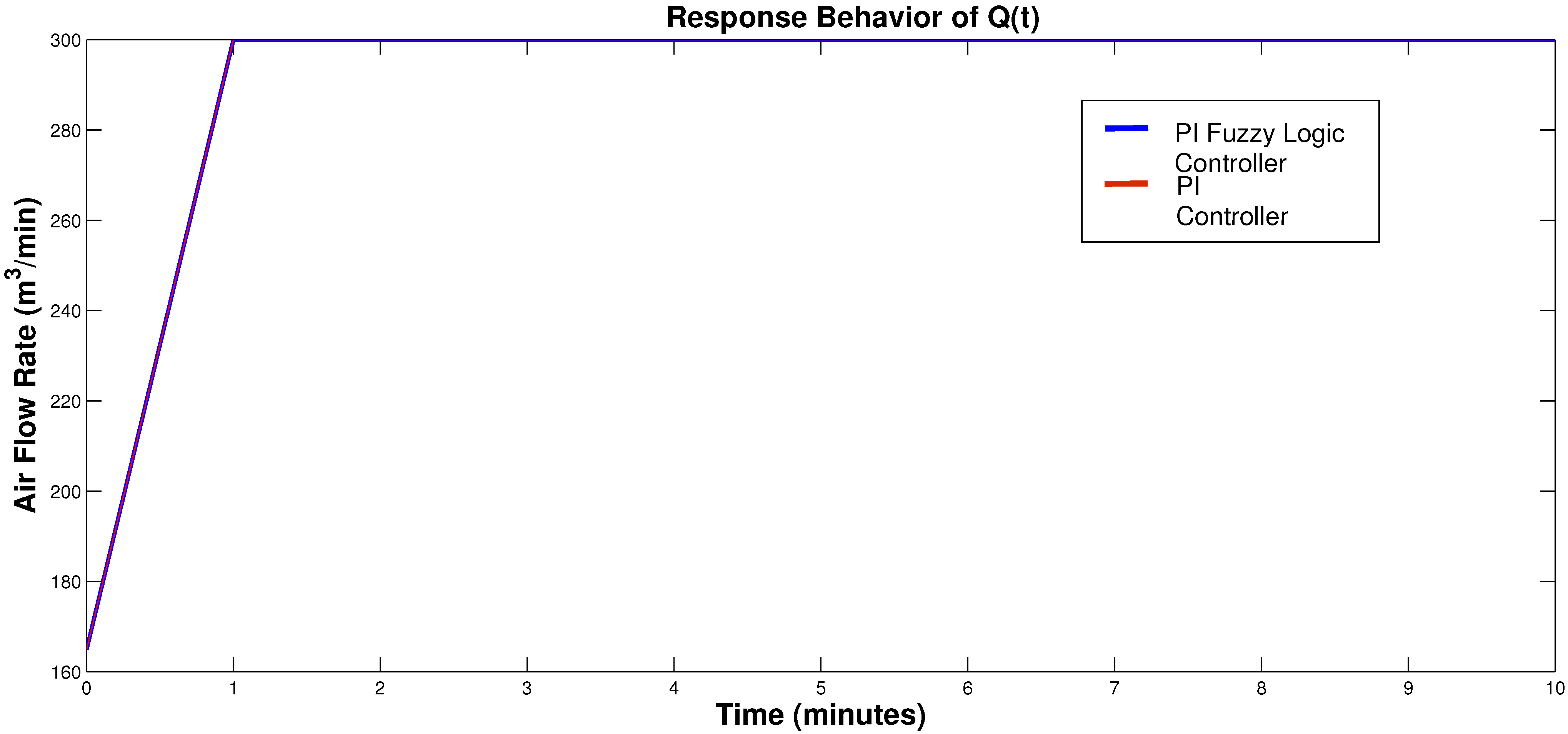
6. Simulation Results
| Parameter | Value |
|---|---|
| C(0) | 5 ppm |
| Q(0) | 169 m3min−1 |
| α | 0.0021 min−1 |
| M0 | 3750 mg |
| V | 0.26 m3 |
| ϑ(0) | 1000 rpm |
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- MDH. Minnesota Department of Health Fact Sheet. Available online: http://www.health.state.mn.us/divs/eh/indoorair/voc/ (accessed on 6 January 2015).
- WHO (World Health Organization). Preventing disease through healthy environments exposure to benzene; a major public health concern. Available online: http://www.who.int/ipcs/features/benzene.pdf (accessed on 6 January 2015).
- Bahadar, H.; Mostafalou, S.; Abdollahi, M. Current understandings and perspectives on non-cancer health effects of benzene: A global concern. Toxicol. Appl. Pharmacol. 2014, 276, 83–94. [Google Scholar] [CrossRef] [PubMed]
- IARC, International Agency for Research on Cancer (IARC)–Summaries & Evaluations. Available online: http://www.inchem.org/documents/iarc/suppl7/benzene.html (accessed on 6 January 2015).
- Ireland, B.; Collins, J.J.; Buckley, C.F.; Riordan, S.G. Cancer mortality among workers with benzene exposure. Epidemiology 1997, 8, 318–320. [Google Scholar] [CrossRef] [PubMed]
- Smith, M.T. Advances in understanding benzene health effects and susceptibility. Annu. Rev. Publ. Health 2010, 31, 133–148. [Google Scholar] [CrossRef] [PubMed]
- Manes, G.; Collodi, G.; Fusco, R.; Gelpi, L.; Manes, A.; di Palma, D. Real-Time monitoring of volatile organic compounds in hazardous sites. In Environmental Monitoring; Ekundayo, E., Ed.; InTech: Rijeka, Croatia, 2010; pp. 219–244. [Google Scholar]
- Sakhvidi, M.J.; Barkhordari, A.; Salehi, M.; Behdad, S.; Fallahzadeh, H. Application of mathematical models in combination with Monte Carlo simulation for prediction of isoflurane concentration in an operation room theater. Ind. Health 2013, 51, 545–551. [Google Scholar] [CrossRef]
- Delgado-Saborit, J.M.; Aquilina, N.J.; Meddings, C.; Baker, S.; Harrison, R.M. Estimating benzene exposure at a solvent parts washer. Environ. Health Persp. 2009, 117, 1571–1579. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Kang, D.; Choi, D.; Yeo, M.; Kim, K. VOC emission from building materials in residential buildings with radiant floor heating systems. Air Qual. Res. 2012, 12, 1398–1408. [Google Scholar] [CrossRef]
- Persoons, R.; Maitre, A.; Bicout, D.J. Modelling the time profiles of organic solvent concentrations for occupational exposure assessment purposes. Ann. Occup. Hyg. 2011, 55, 421–435. [Google Scholar] [CrossRef] [PubMed]
- Eun-Hee, L.; Hee-Wook, R.; Kyung-Suk, C. Removal of benzene and toluene in polyurethane biofilter immobilized with Rhodococcus sp. EH831 under transient loading. Bioresour. Technol. 2009, 100, 5656–5663. [Google Scholar]
- Kanojiya, R.G.; Meshram, P.M. Optimal tuning of PI controller for speed control of DC motor drive using particle swarm optimization. In Proceedings of the International Conference on Advances in Power Conversion and Energy Technologies (APCET), Mylavaram, India, 2–4 August 2012; pp. 1–6.
- Linker, R.; Gutman, P.O.; Seginer, I. Robust controllers for simultaneous control of temperature and CO2 concentration in greenhouses. Control Eng. Pract. 1999, 7, 851–862. [Google Scholar] [CrossRef]
- Chao, C.Y.H.; Hu, J.S. Development of a dual-mode demand control ventilation strategy for indoor air quality control and energy saving. Build. Environ. 2004, 39, 385–397. [Google Scholar] [CrossRef]
- Ginestet, S.; Marchio, D.; Morisot, O. Evaluation of faults impacts on energy consumption and indoor air quality on an air handling unit. Energ. Build. 2008, 40, 51–57. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy sets. Inform. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Kolokotsa, D. Comparison of the performance of fuzzy controllers for the management of the indoor environmental. Build. Environ. 2003, 38, 1439–1450. [Google Scholar] [CrossRef]
- Jaradat, M.; Al-Nimr, M. Fuzzy logic controller deployed for indoor air quality control in naturally ventilated environments. J. Electr. Eng. 2009, 600, 12–17. [Google Scholar]
- Košir, M.; Krainer, A.; Kristl, Ž. Integral control system of indoor environment in continuously occupied spaces. Automat. Constr. 2012, 21, 199–209. [Google Scholar] [CrossRef]
- Brinkman, D.W.B. Volatile solvent evaporation from an operating parts washer. Safety-Kleen Corp.: Elk Grove, IL, USA, 1990. [Google Scholar]
- Nicas, M.; Plisko, M.J.; Spencer, J.W. Estimating benzene exposure at a solvent parts washer. J. Occup. Environ. Hyg. 2006, 3, 284–291. [Google Scholar] [CrossRef] [PubMed]
- Keil, C.B.; Nicas, M. Predicting room vapor concentrations due to spills of organic solvents. Am. Ind. Hyg. Assoc. J. 2003, 64, 445–454. [Google Scholar] [CrossRef]
- Nicas, M. Using mathematical models to estimate exposure to workplace air contaminants. Chem. Health Safety 2003, 64, 10–21. [Google Scholar] [CrossRef]
- Stamper, E.; Koral, R. Handbook of Air Conditioning, Heating, and Ventilating; Industrial Press Inc.: New York, NY, USA, 1979. [Google Scholar]
- Heong, A.K.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar] [CrossRef]
- Singh, S.; Pandey, A.K.; Dipraj, Y. Design of Pi controller to minimize the speed error of D.C. servo motor. IJSTR 2012, 1, 95–98. [Google Scholar]
- Agency for Toxic Substances and Disease Registry (ATSDR). Toxicological Profile for Benzene; U.S. Department of Health and Human Services, Public Health Service: Atlanta, GA, USA, 2007. [Google Scholar]
- Nuaire. ES-OPUSDC Extract fans, Catalogue. Available online: http://www.nuaire.info/catalogue/ESOPUSDC.pdf (accessed on 12 January 2015).
- Rahul, K.M.; Chandrajit, B. Biodegradation of waste gas containing benzene by using corn-cob based biofilter. RJCS 2012, 2, 60–65. [Google Scholar]
- Kumar, R.; Daya, M.L. A novel self-tuning fuzzy based PID controller for speed control of induction motor drive. In Proceedings of the International Conference on Control Communication and Computing (ICCC), Thiruvananthapuram, India, 13–15 December 2013; pp. 62–67.
- Passino, K.M.; Yurkovich, S. Fuzzy Control; Addison-Wesley: Menlo Park, CA, USA, 1998. [Google Scholar]
- Gopala-Rao, K.A.; Amarendra-Reddy, B.; Durga-Bhavani, P. Fuzzy Pi and integrating type fuzzy PID controllers of linear, nonlinear and time-delay systems. IJCA 2010, 1, 41–47. [Google Scholar]
- Dongrui, W.; Woei, W.T.P. Interval type-2 fuzzy PI controllers: Why they are more robust. In Proceedings of the IEEE International Conference on Granular Computing, San Jose, CA, USA, 14–16 August 2010; pp. 803–807.
- Zhao, H.; Guo, S.P. Selecting green supplier of thermal power equipment by using a hybrid MCDM method for sustainability. Sustainability 2014, 6, 217–235. [Google Scholar] [CrossRef]
- Pitalúa-Díaz, N.; Herrera-López, E.J.; Velázquez-Contreras, L.E.; Álvarez-Chávez, C.R.; Munguia-Vega, N. Controlling indoor benzene concentrations using a fuzzy system. In Proceedings of the 15th IFAC Symposium on Control, Optimization and automation in Mining, Mineral & Metal Processing, San Diego, CA, USA, 25–28 August 2013; pp. 449–454.
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pitalúa-Díaz, N.; Herrera-López, E.J.; Valencia-Palomo, G.; González-Angeles, A.; Rodríguez-Carvajal, R.A.; Cazarez-Castro, N.R. Comparative Analysis between Conventional PI and Fuzzy LogicPI Controllers for Indoor Benzene Concentrations. Sustainability 2015, 7, 5398-5412. https://doi.org/10.3390/su7055398
Pitalúa-Díaz N, Herrera-López EJ, Valencia-Palomo G, González-Angeles A, Rodríguez-Carvajal RA, Cazarez-Castro NR. Comparative Analysis between Conventional PI and Fuzzy LogicPI Controllers for Indoor Benzene Concentrations. Sustainability. 2015; 7(5):5398-5412. https://doi.org/10.3390/su7055398
Chicago/Turabian StylePitalúa-Díaz, Nun, Enrique J. Herrera-López, Guillermo Valencia-Palomo, Alvaro González-Angeles, Ricardo A. Rodríguez-Carvajal, and Nohe R. Cazarez-Castro. 2015. "Comparative Analysis between Conventional PI and Fuzzy LogicPI Controllers for Indoor Benzene Concentrations" Sustainability 7, no. 5: 5398-5412. https://doi.org/10.3390/su7055398