Railway Freight Transport and Logistics: Methods for Relief, Algorithms for Verification and Proposals for the Adjustment of Tunnel Inner Surfaces




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- LS allows downstream upgrading of points of interest;
- the acquisition process is automatic and not subjected to error by the operator;
- data capture times are considerably lower and therefore also the on-site downtime of operators is reduced, ensuring human health and economic savings;
- Global Positioning System (GPS), inclinometer and compass are integrated in the LS and give information about its position;
- LS provides a complete three-dimensional model and extraction of metric and constructive details [19].
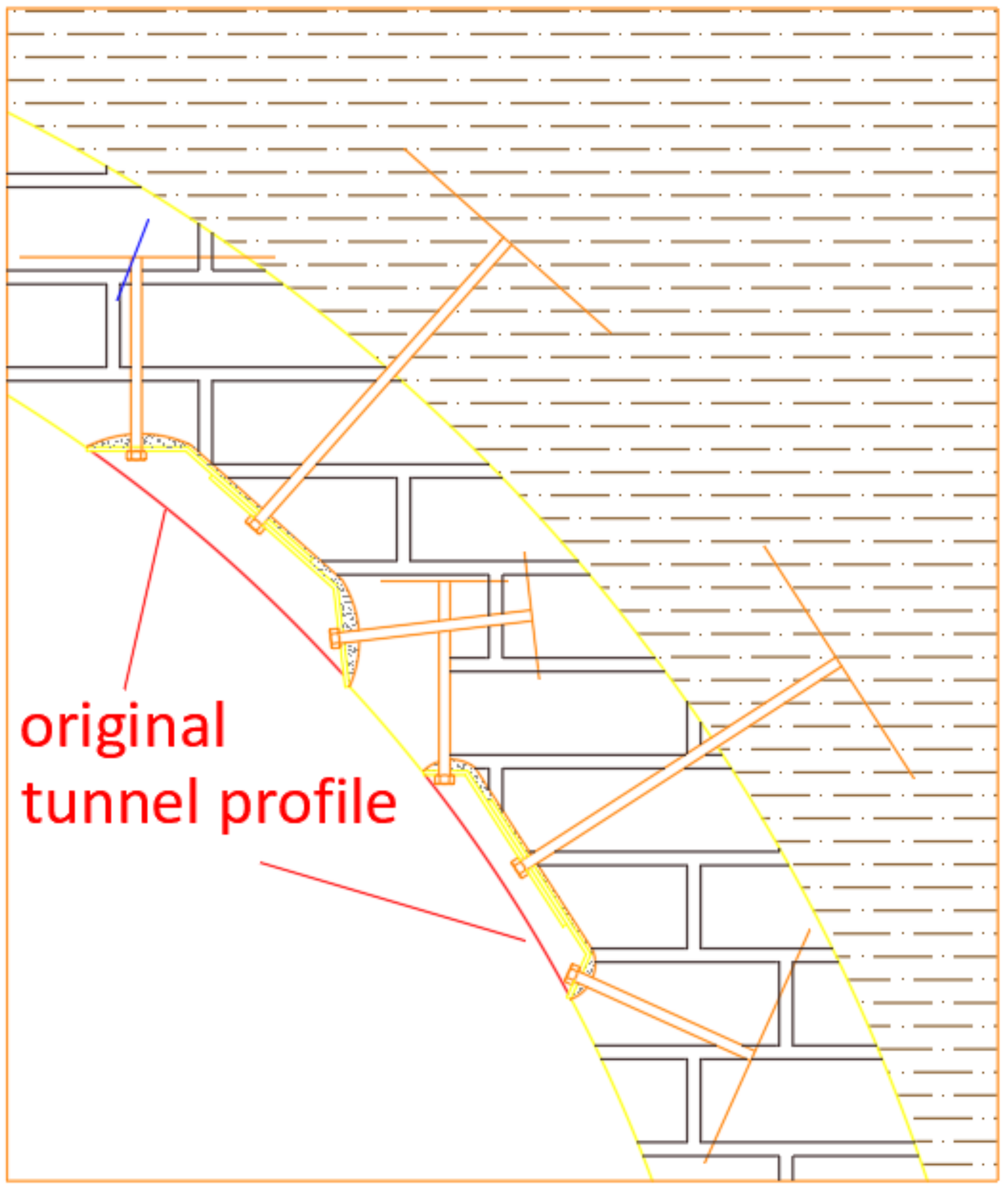
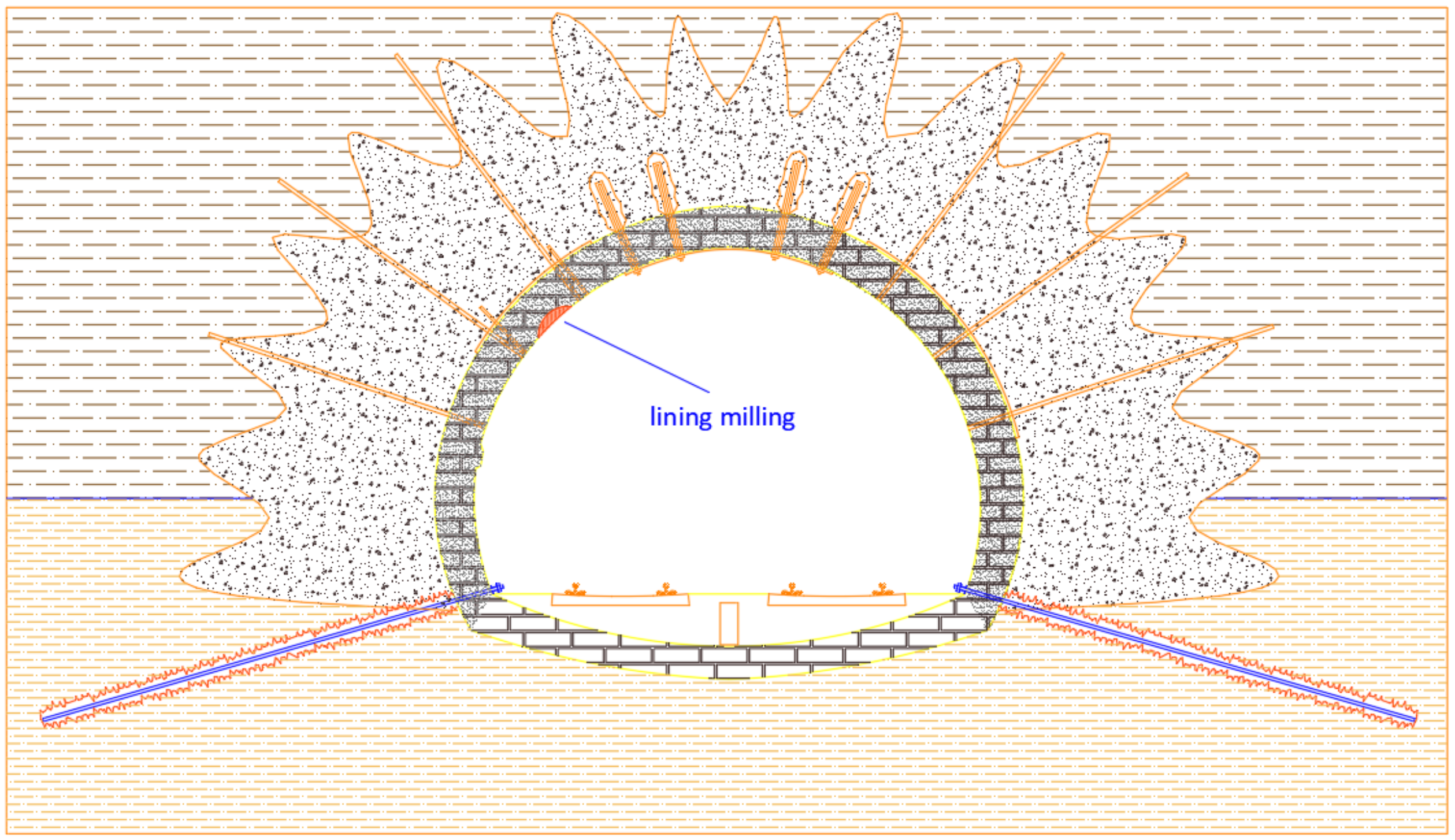
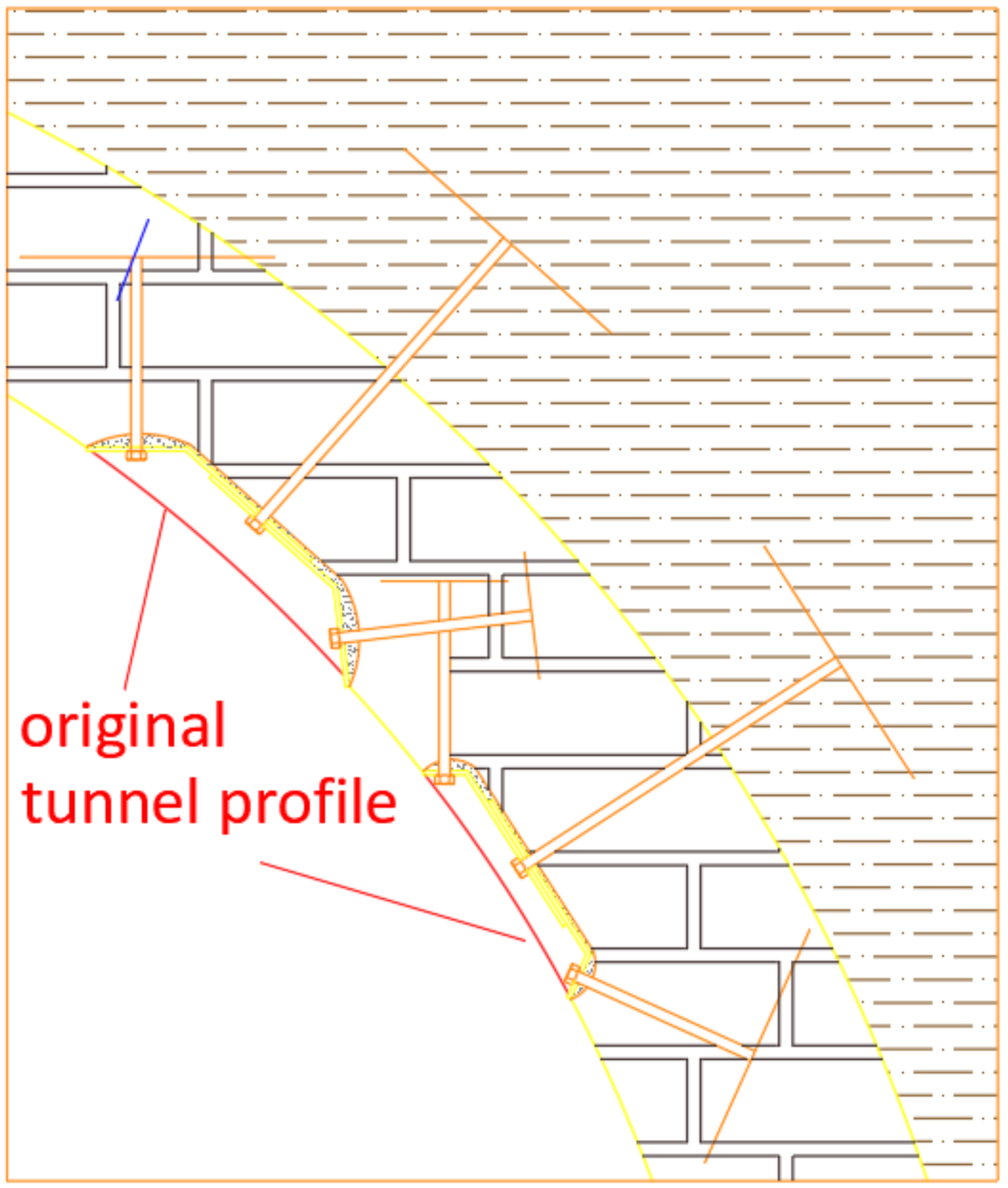
- the change of the tunnel intrados locally by mean milling of its lining;
- the variation of the track geometry, in particular the gradient, to increase the inner tunnel surface.
2. Methods
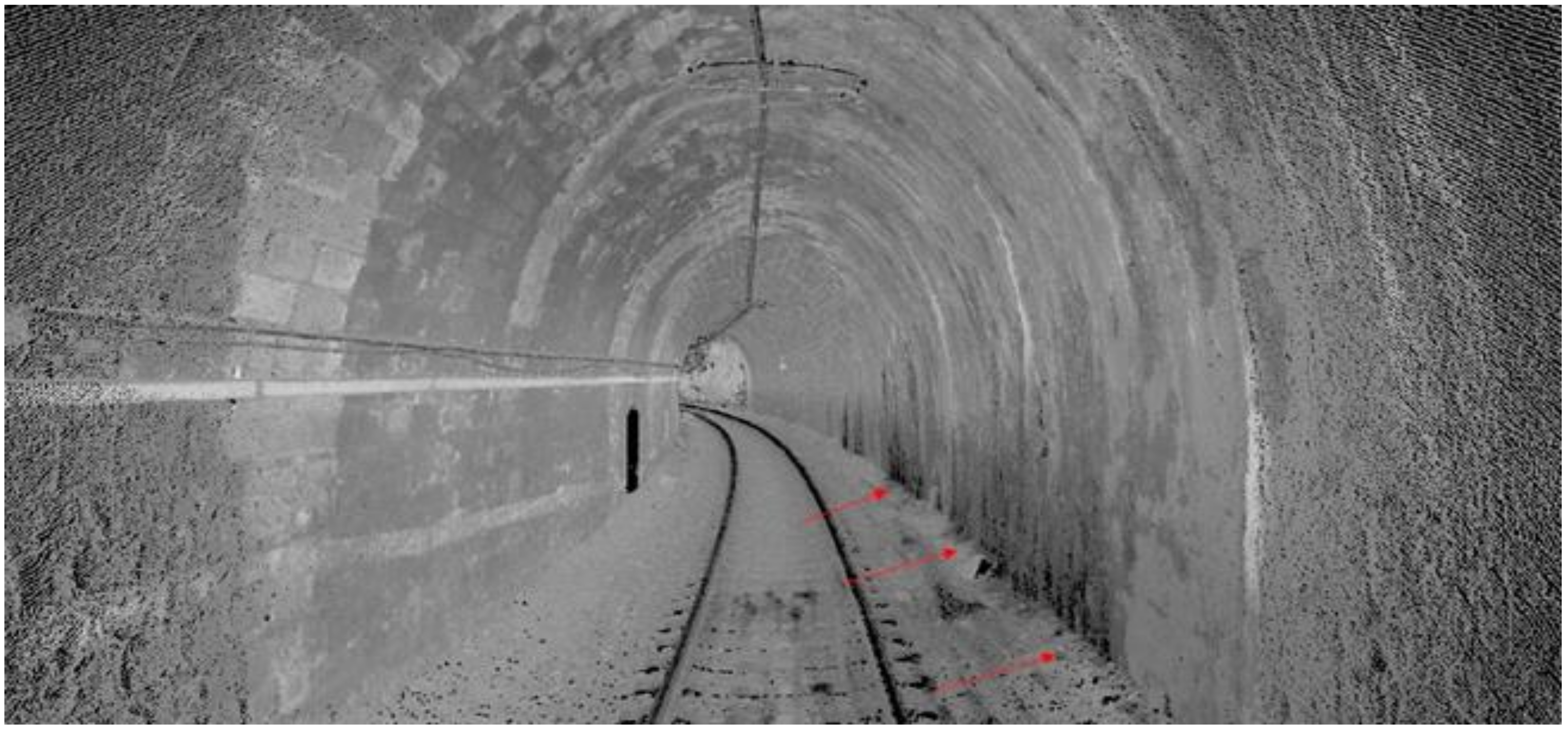
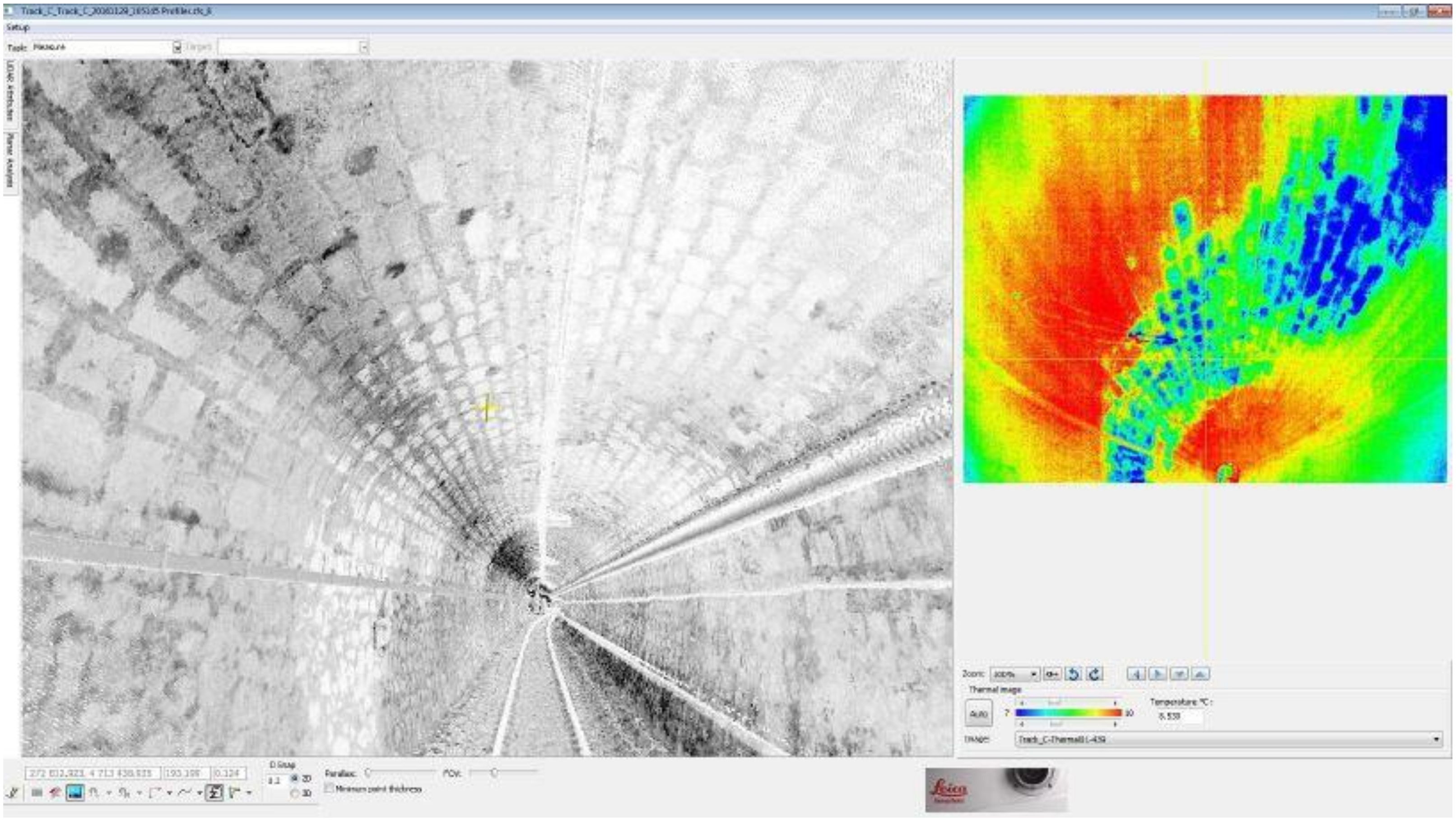
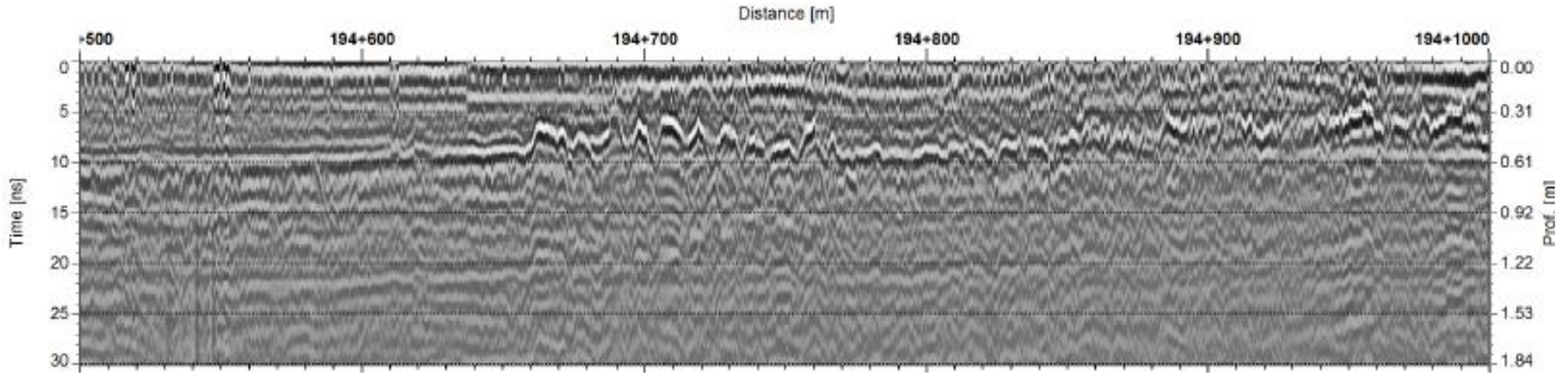
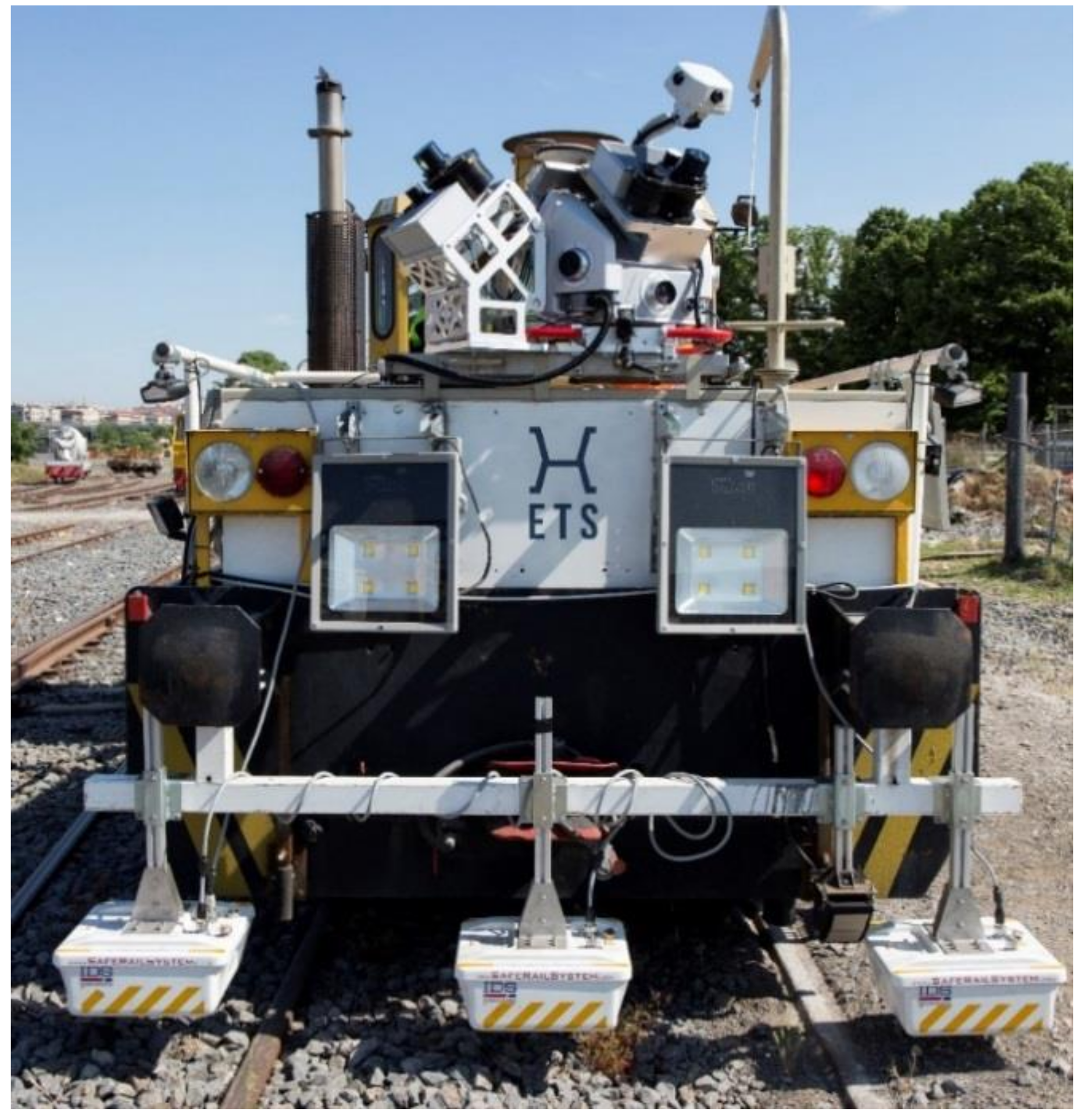
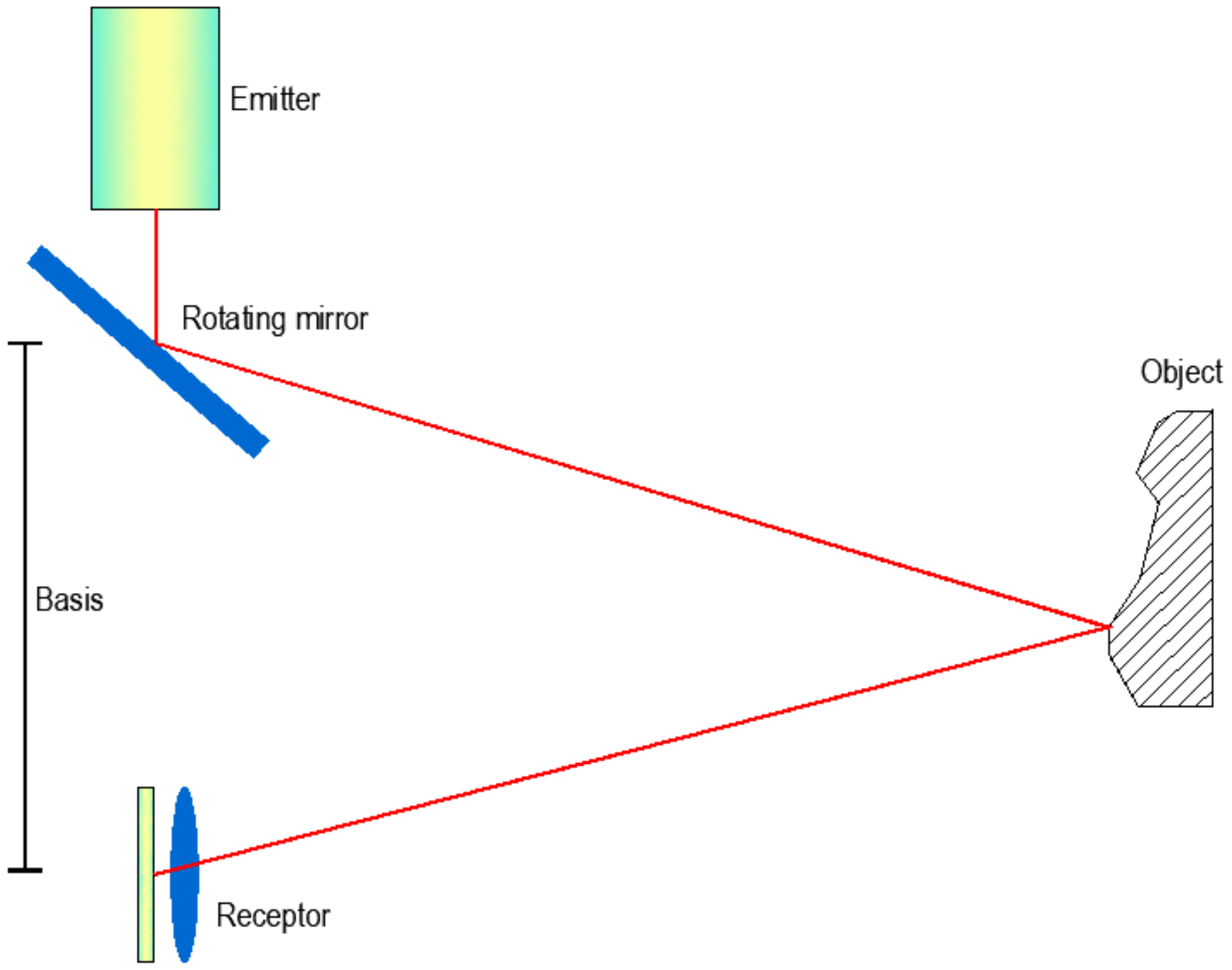
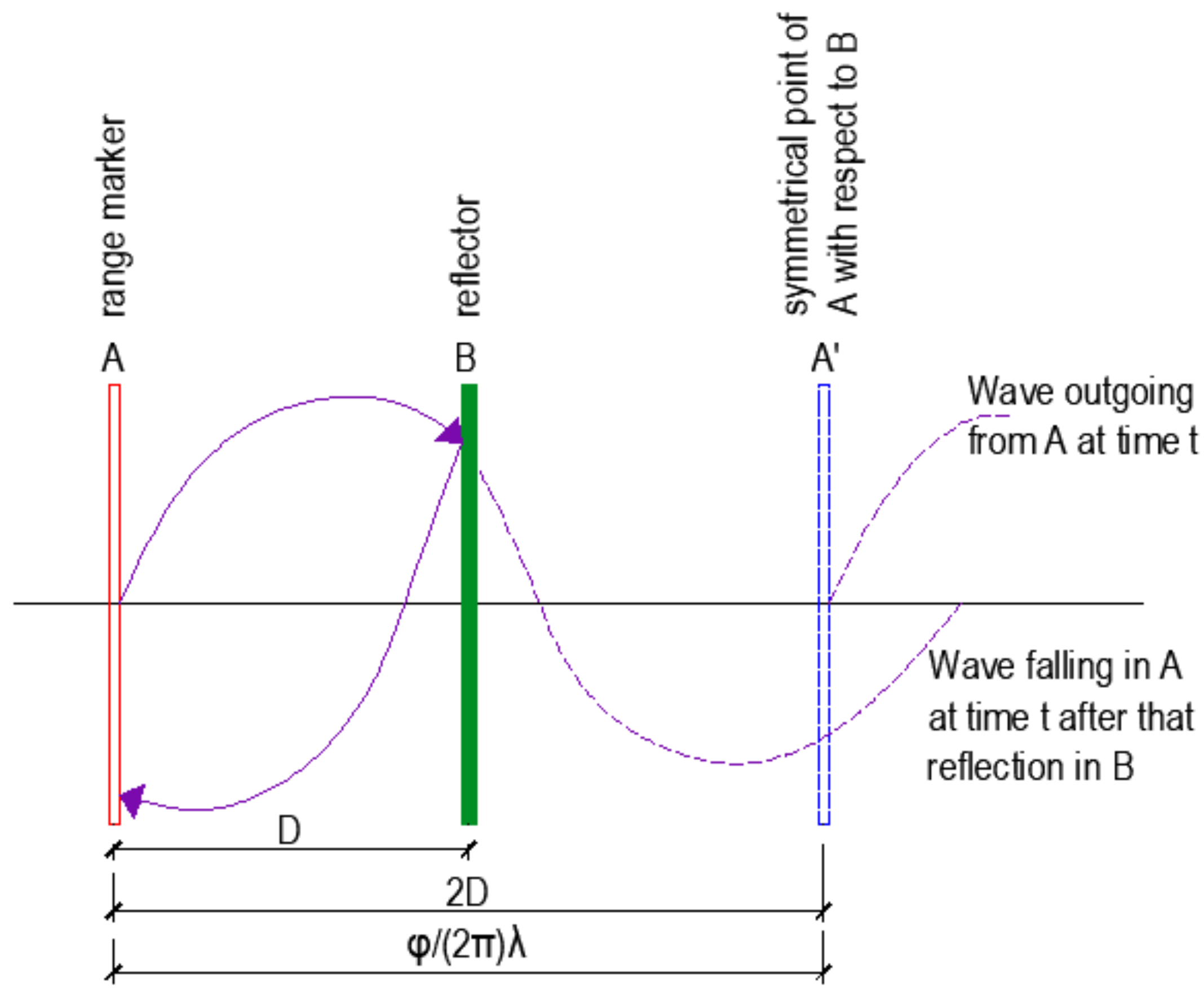
2.1. Surveying Methods
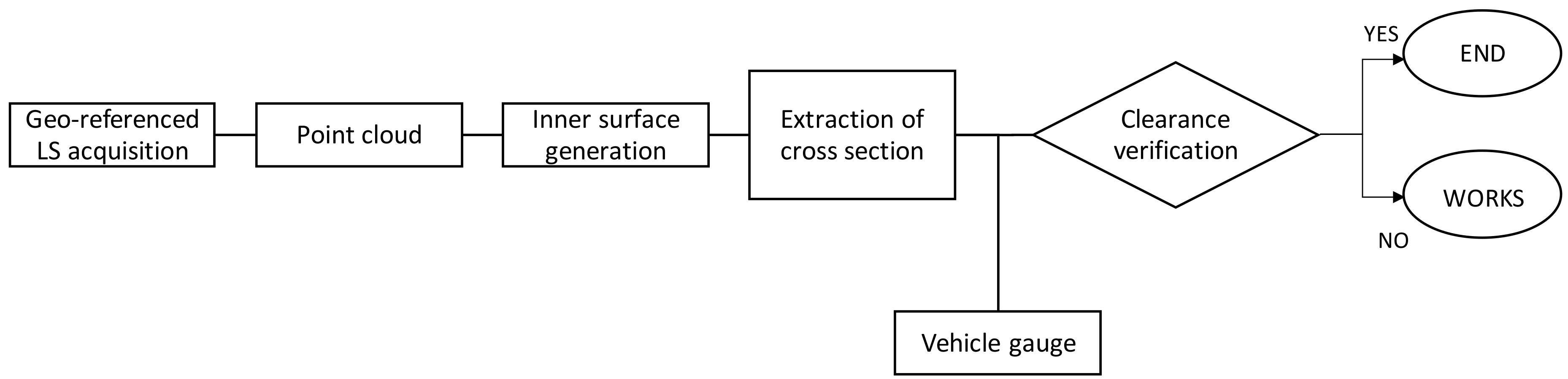
2.2. Elaboration and Interpretation of Survey Data
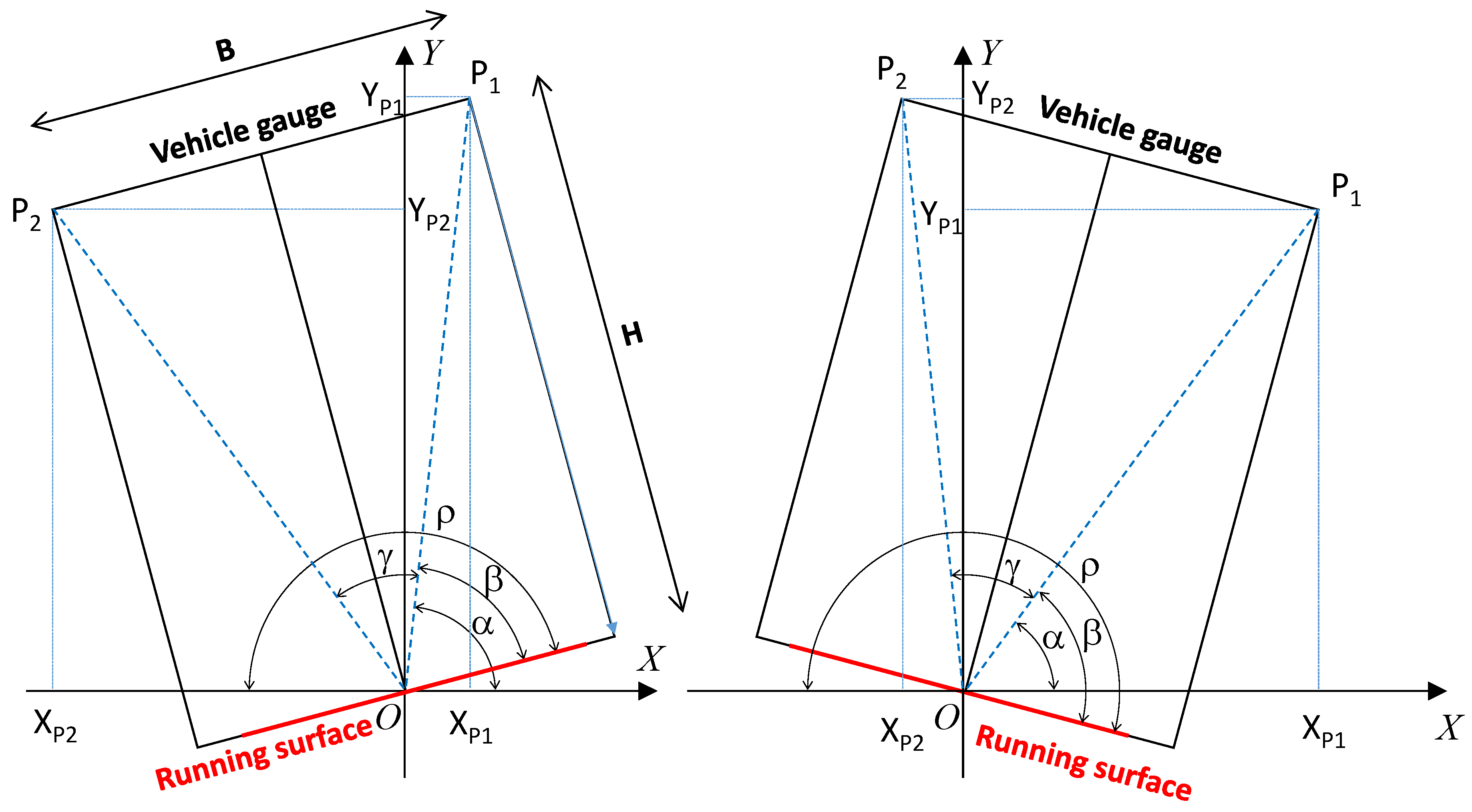
- α (P1OXP1): the angle between the segment P1O and the axis x;
- β: the angle between the segment P1O and the running surface (the top surface of the two rails at any point of railroad track);
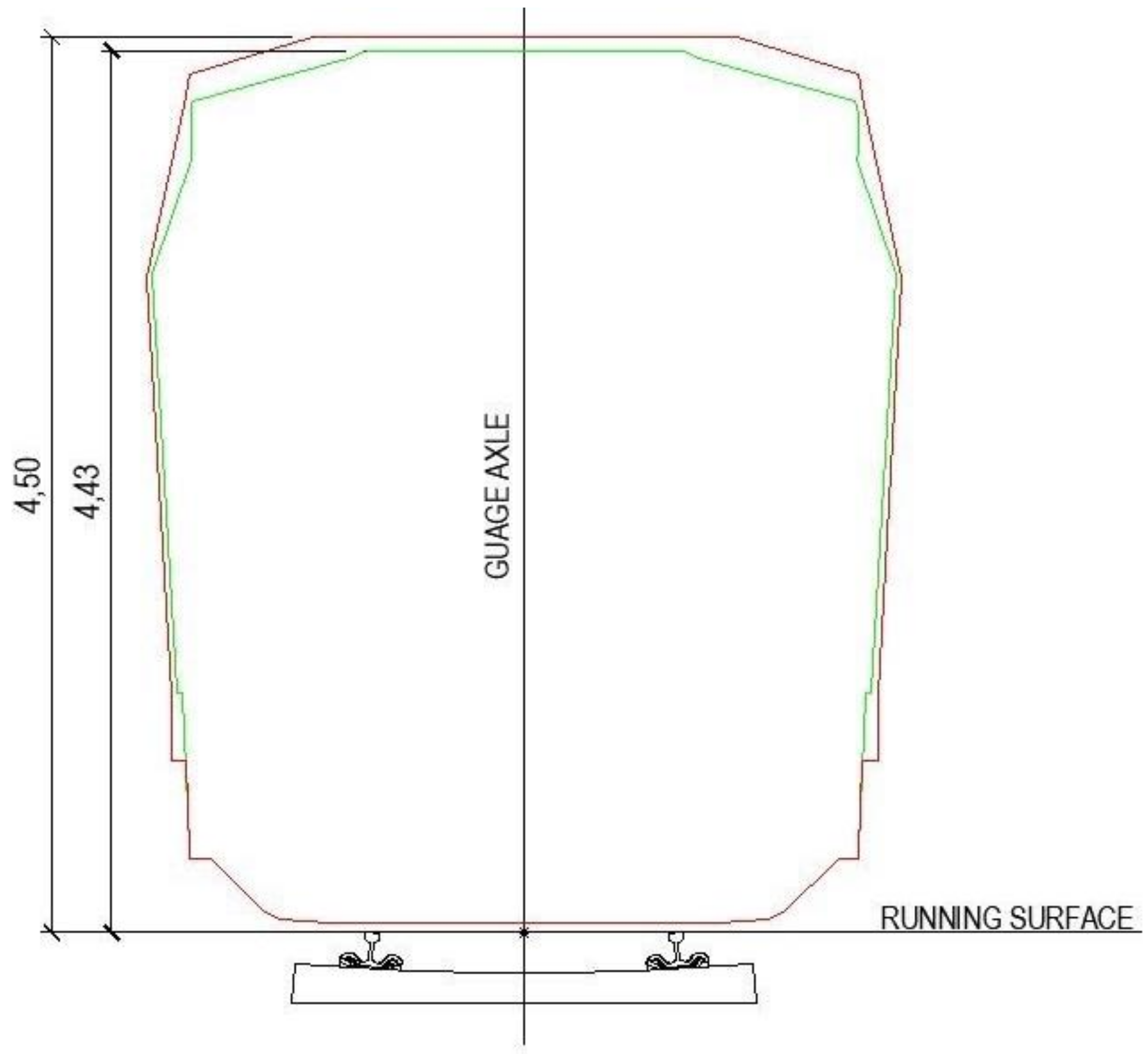
- γ (P2OP1): the angle between the segments P1O and P2O: it depends on the vehicle gauge;
- ρ: the angle between the running surface and the axis x: it depends on the examined cross section and it is always positive.
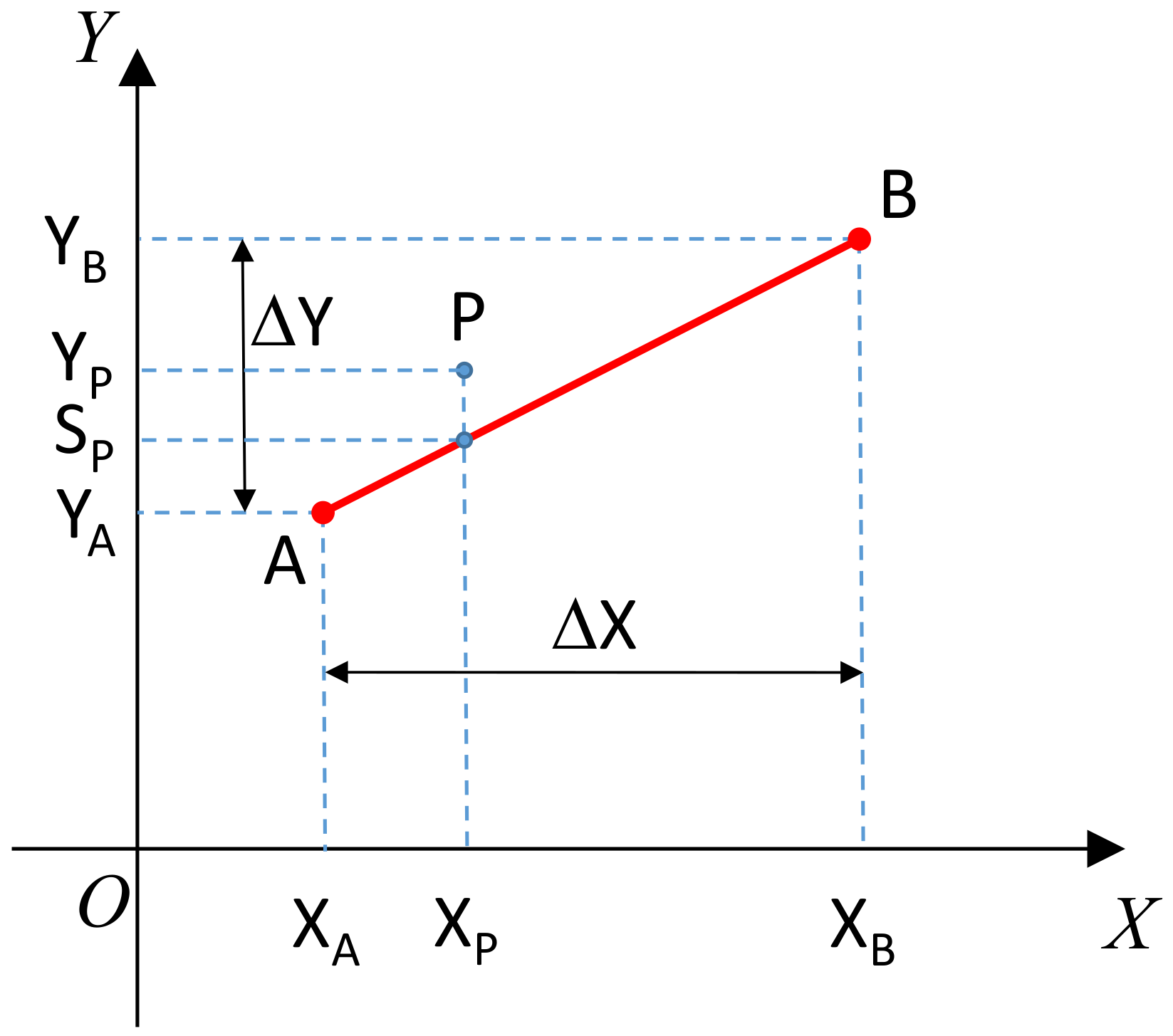
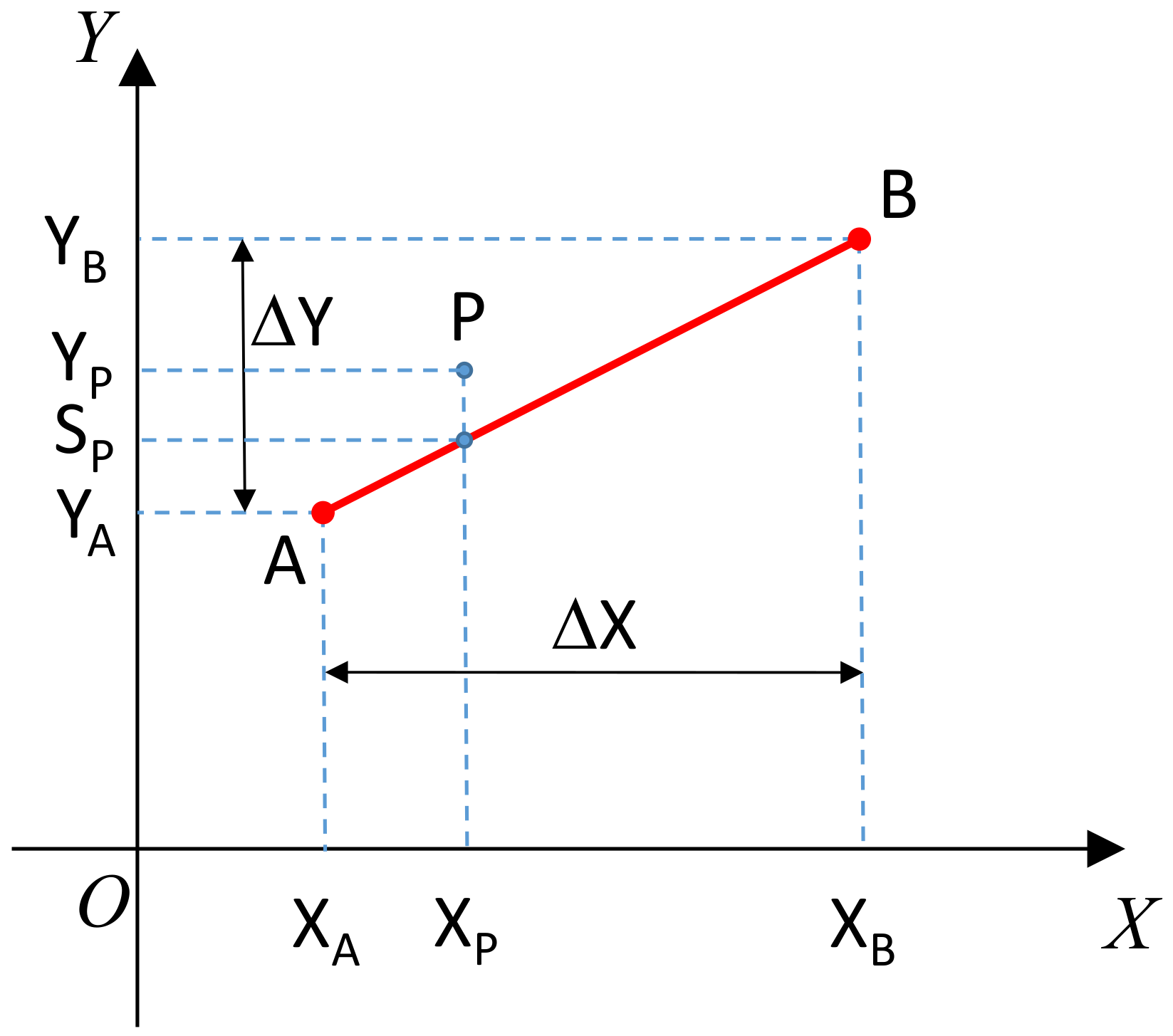
- the procedure verifies if the coordinates of P satisfy Equations (9) and (10):min (XA; XB) ≤ XP ≤ max (XA; XB)min (YA; YB) ≤ YP ≤ max (YA; YB)If both conditions are verified,
- the procedure verifies if the co-ordinates of P satisfy the condition (Equation (11));When Equation (11) is not satisfied, two alternatives are possible to solve the problem of interference between the inner profile of the railway tunnel and the vehicle gauge:
- Alternative 1: consolidation and milling of the existing intrados coating, punctually in the sections where Equation (11) is not satisfied without thereby altering the rail track geometry;
- Alternative 2: modification of the geometry of rail track, in the sections where Equation (11) is not satisfied particularly considering the redesign of the gradient. It is important to note that the re-design of the track profile entails change new vertical curves between the grade lines, but it is forced by planimetric characteristics of the alignment: vertical curves should not be placed on the transitional curves. Moreover, this works imply new excavations to enlarge the lower portion of the tunnel and move the concrete invert slab downwards. For this purpose, geological and geotechnical tests should investigate typology and strength of tunnel lining and surrounding soils.
3. Case Study
- Cleaning of the intrados with high-pressure (400–500 bar) sand washers: this activity bared the masonry surface, eliminated falling masonry parts, and pointed out further problems not found during the inspections because hidden under the dirt (Figure 13)
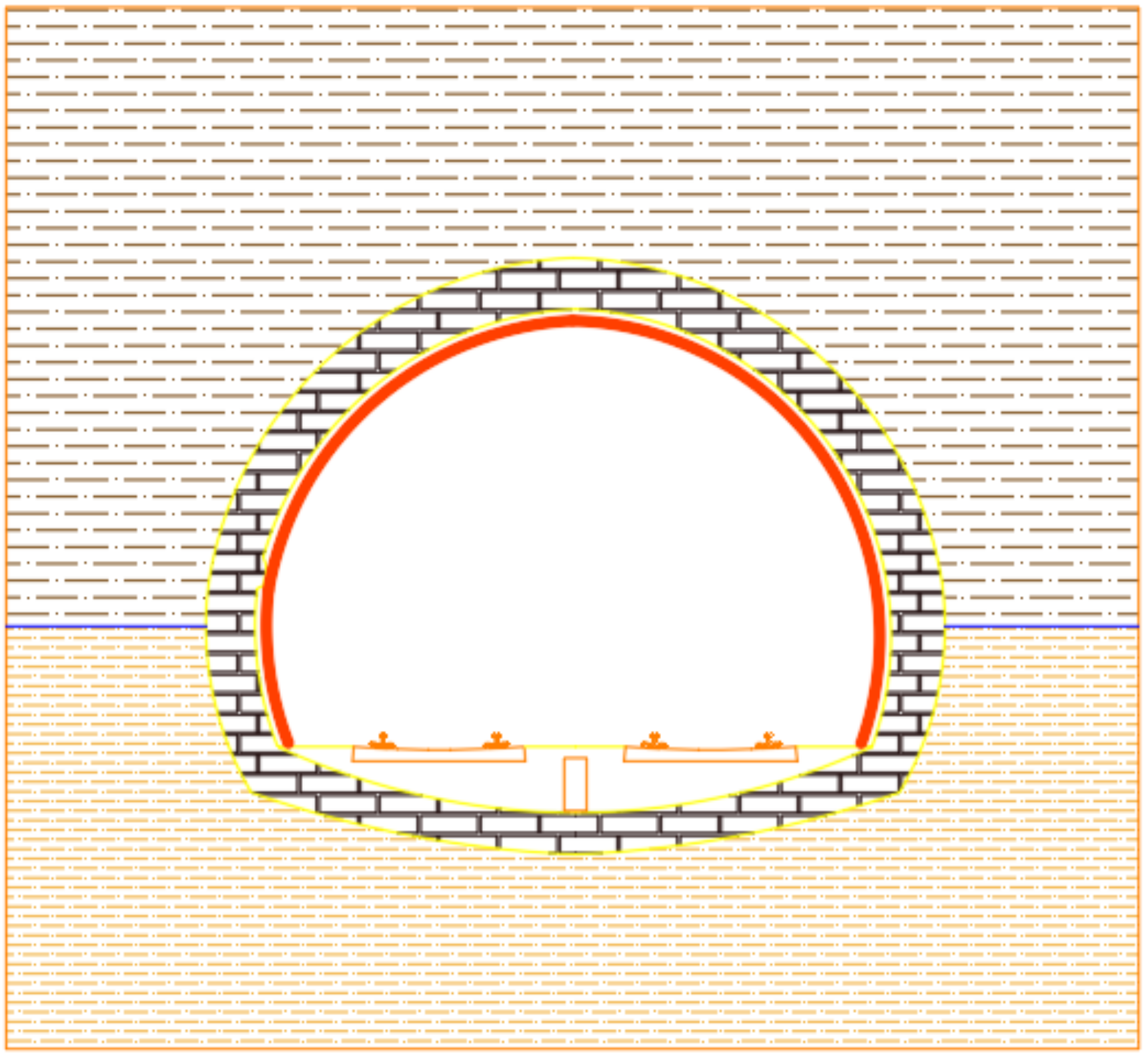
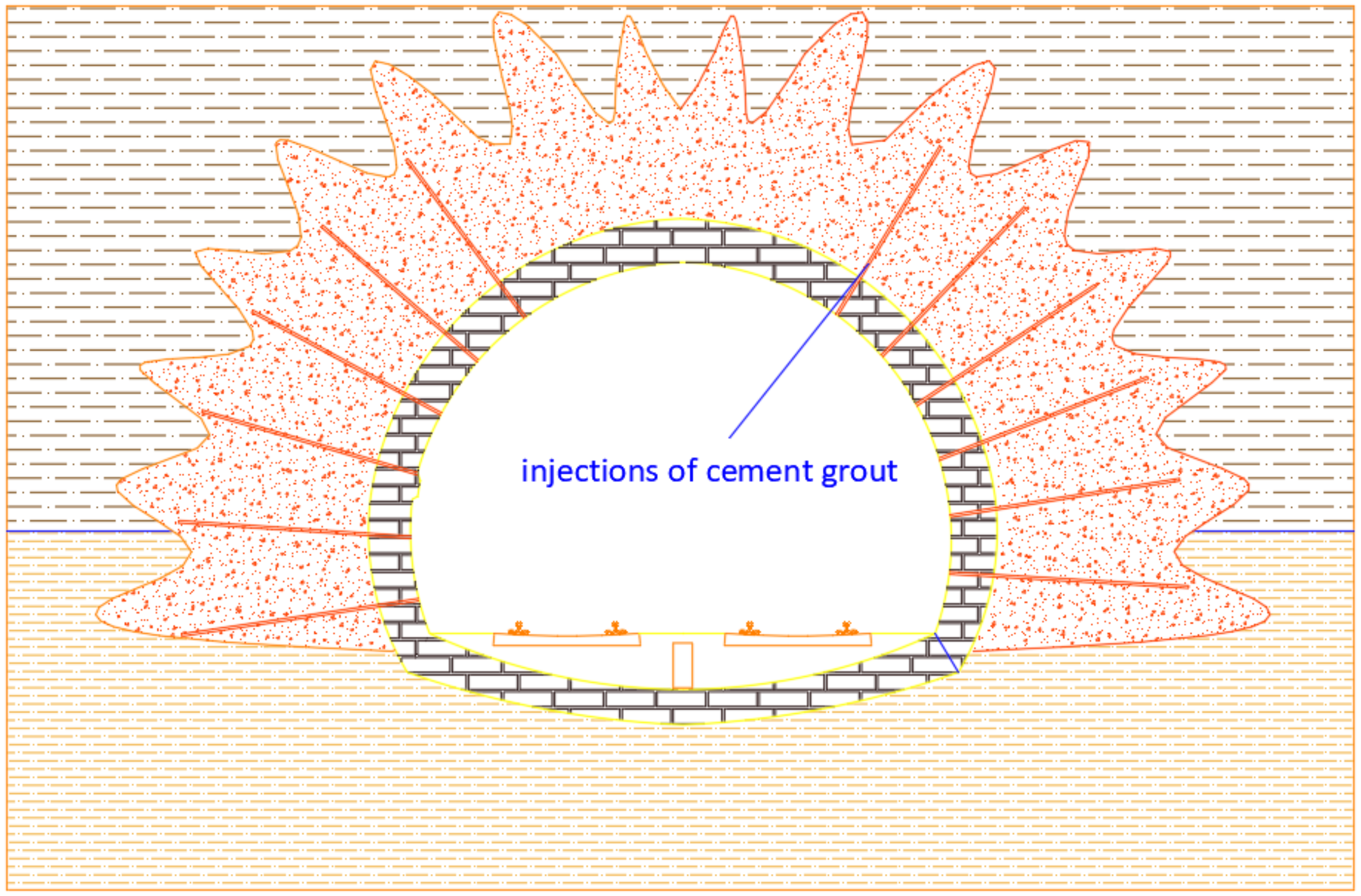
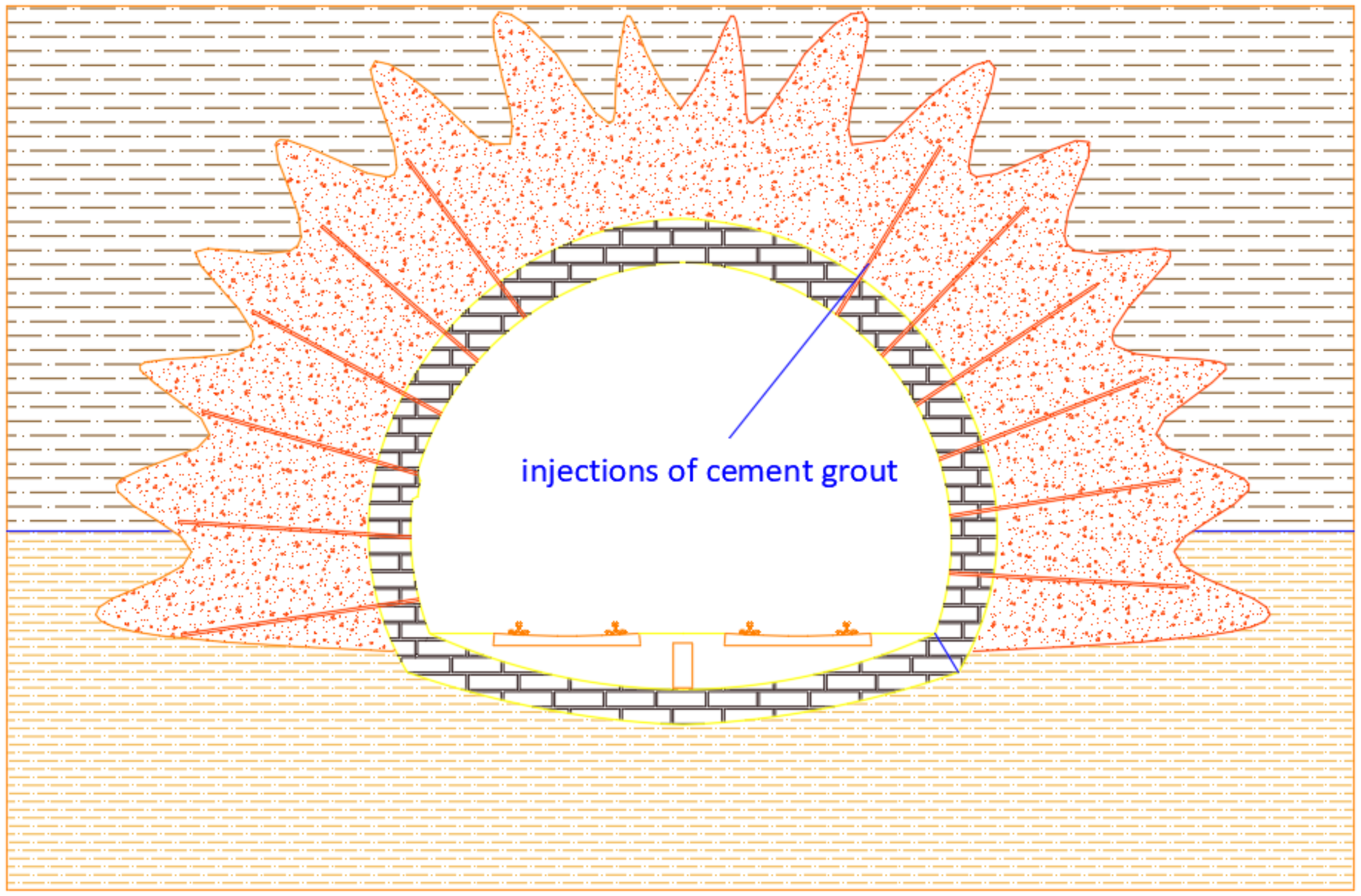
- Diffused injections of cement grout mixed with acrylic resins for the consolidation of the excavated surface; such intervention filled the void between soil and lining, which could cause asymmetric loads in the lining arc (Figure 14). The grout holes were 2500–3000 mm deep into the soil;
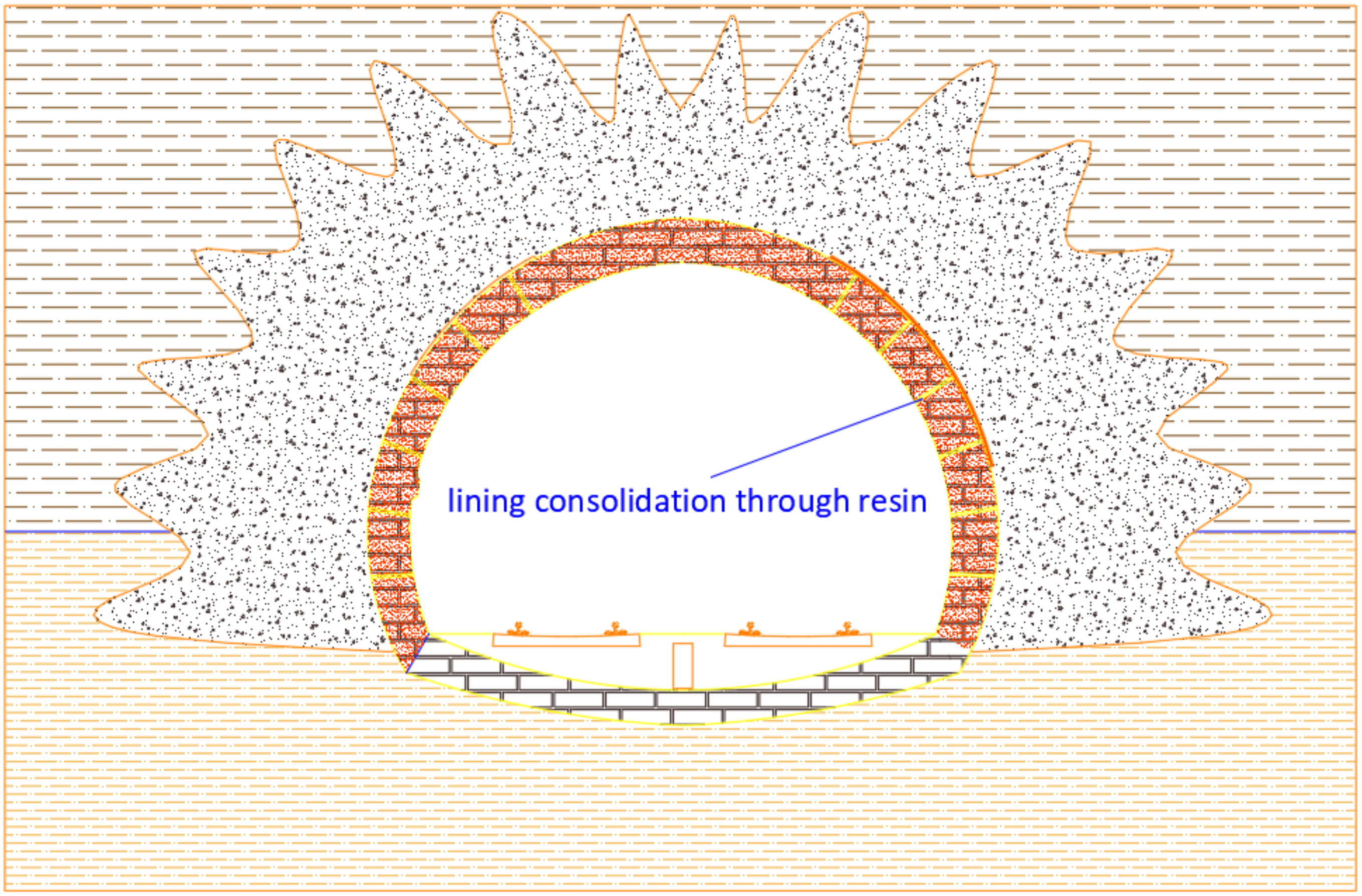
- Lining consolidation through resin and realization of a resistant 5 cm-thick layer between the extrados and the soil (Figure 15) in the zone where the problems appear;
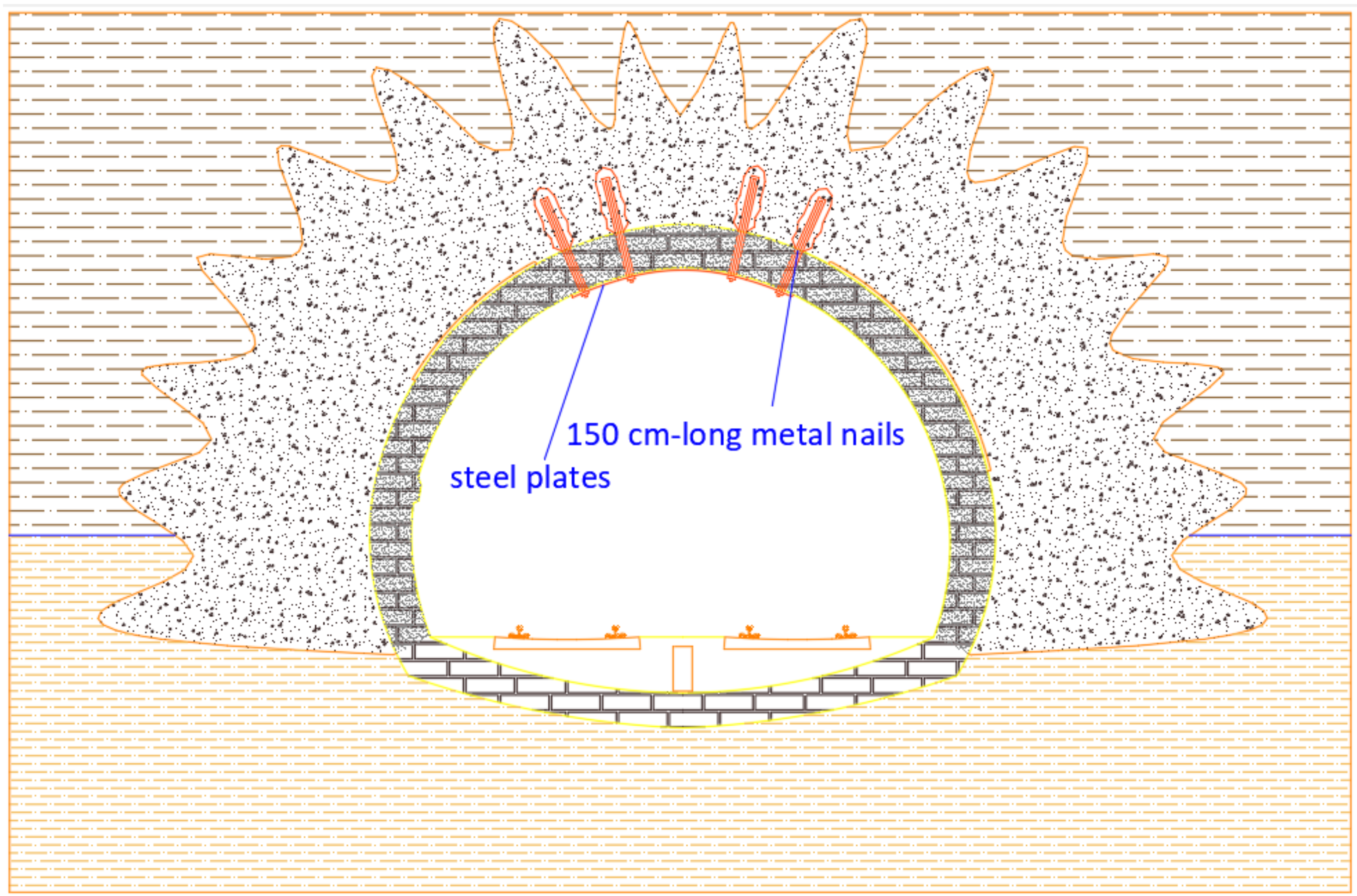
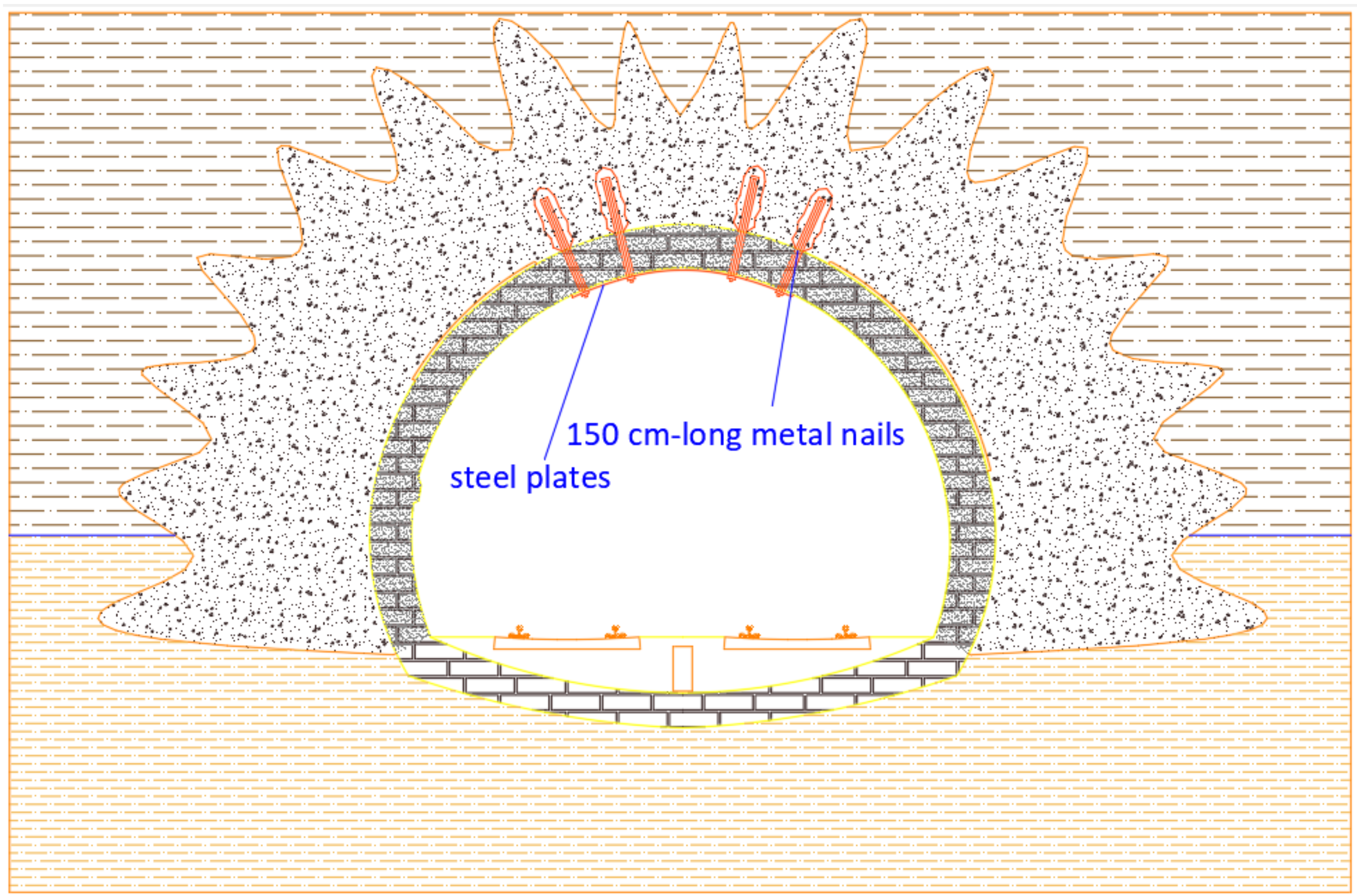
- anchorage of the tunnel crown with 150 cm-long metal nails to limit radial loads where the axial force of the lining was usually low, thus preventing failure for excessive flexural moments (Figure 16);
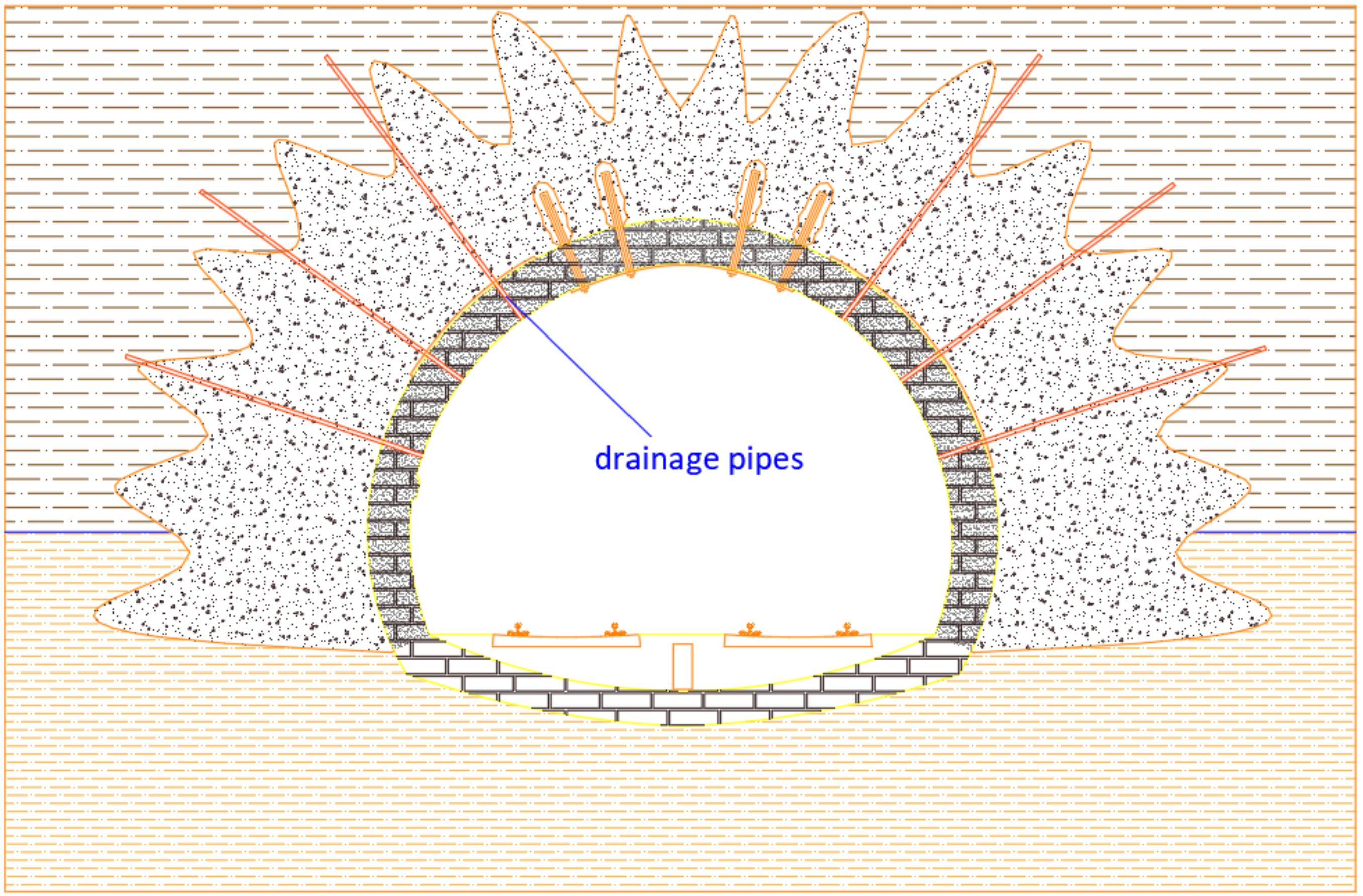
- Realization of drainage system to collect groundwater: micro-slotted 3 m-long PVC pipes with 2.5 cm diameter have been inserted. Water captured from the drainage pipes shall be collected by a series of transversal ducts along arch and piers, and conveyed in the central duct beneath the tracks. Finally, the ducts were covered by a plastic waterproof layer, properly anchored to the lining (Figure 17)
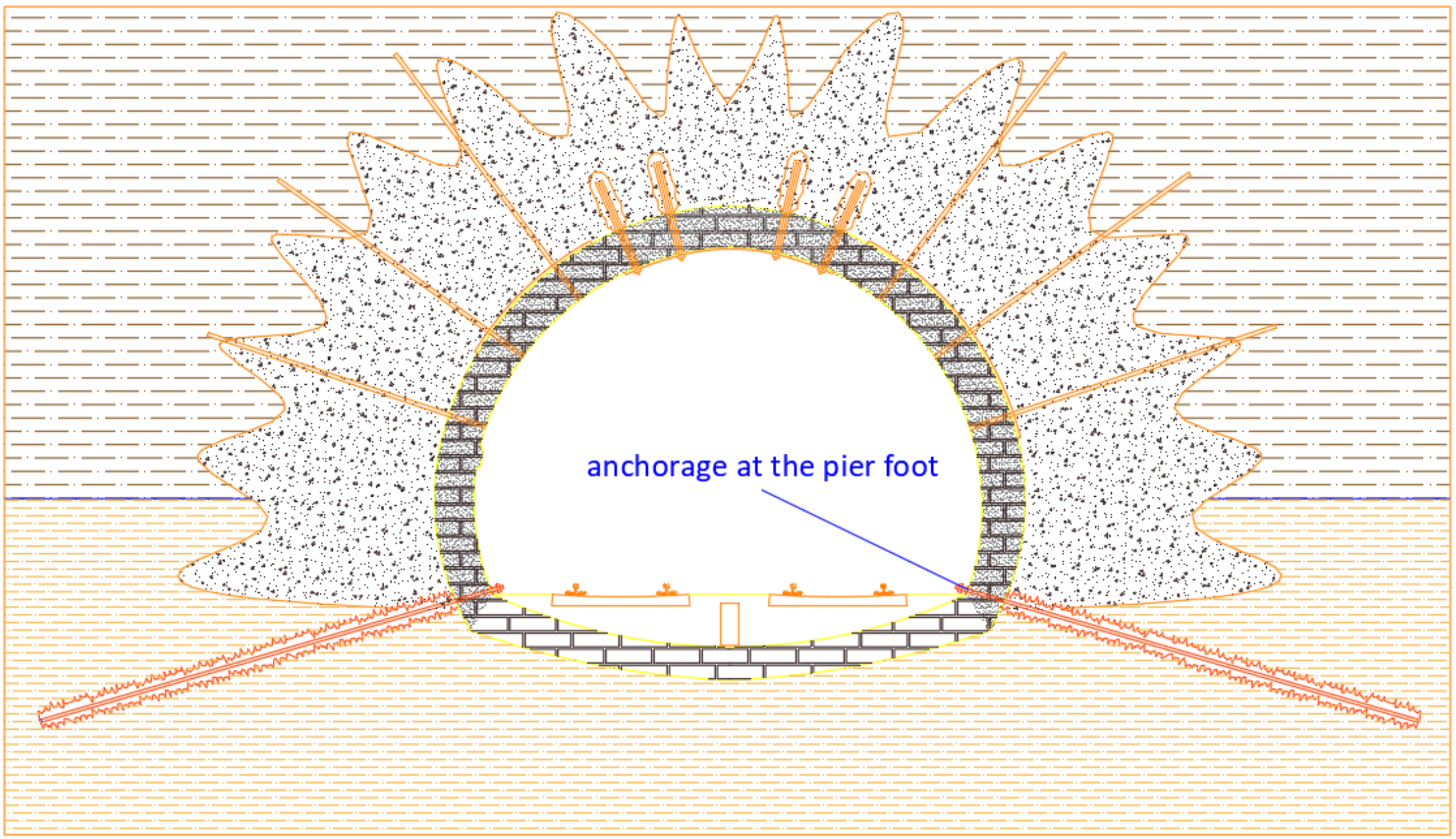
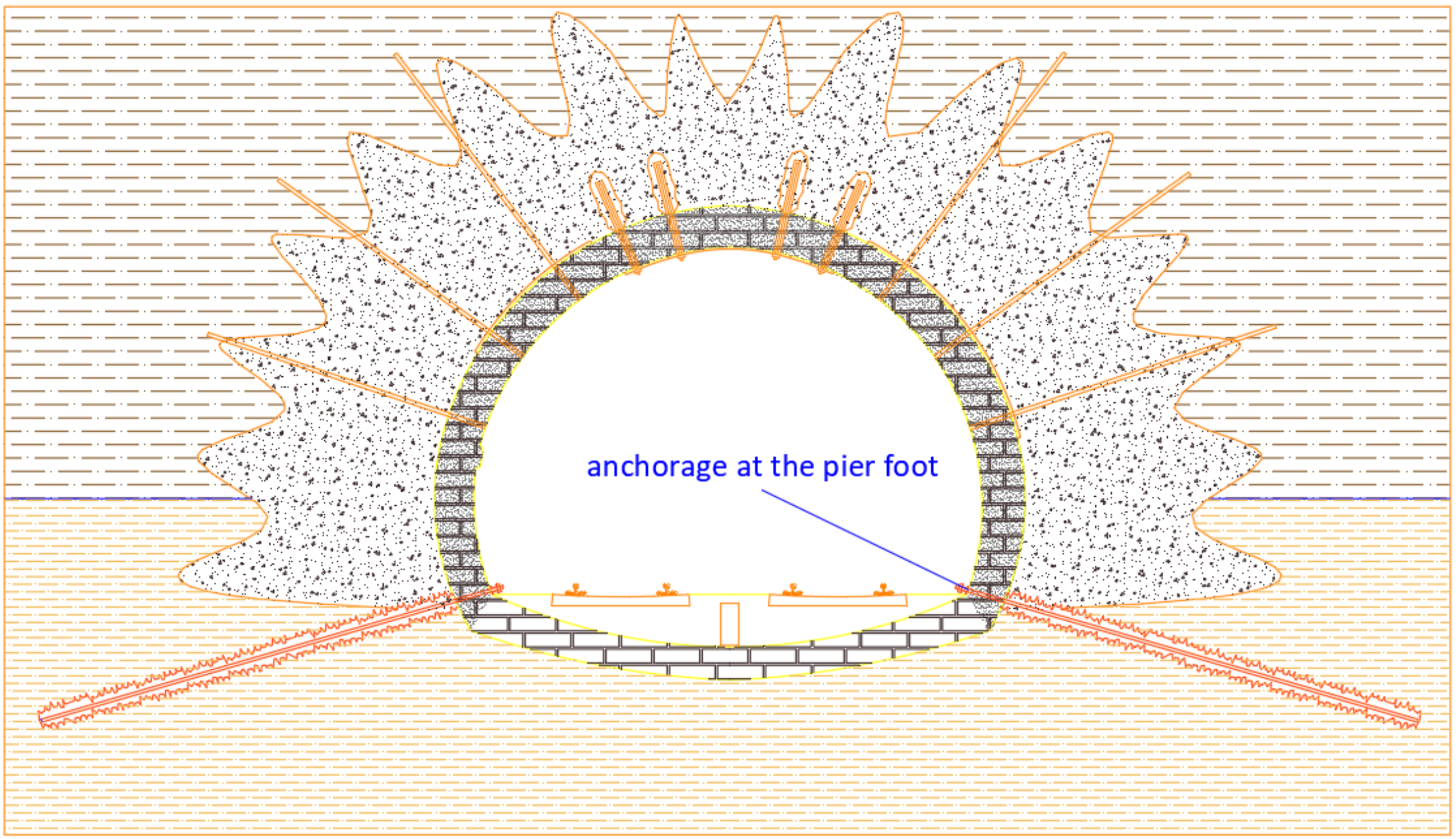
- Realization of anchorages at the elevation of the running surface through passive bars: this work ensured a constraint at the pier foot, in the event that the tunnel concrete invert materials were not fully effective due to its degradation. This intervention constituted a prerequisite for modifying the stress conditions through the subsequent works (Figure 18)
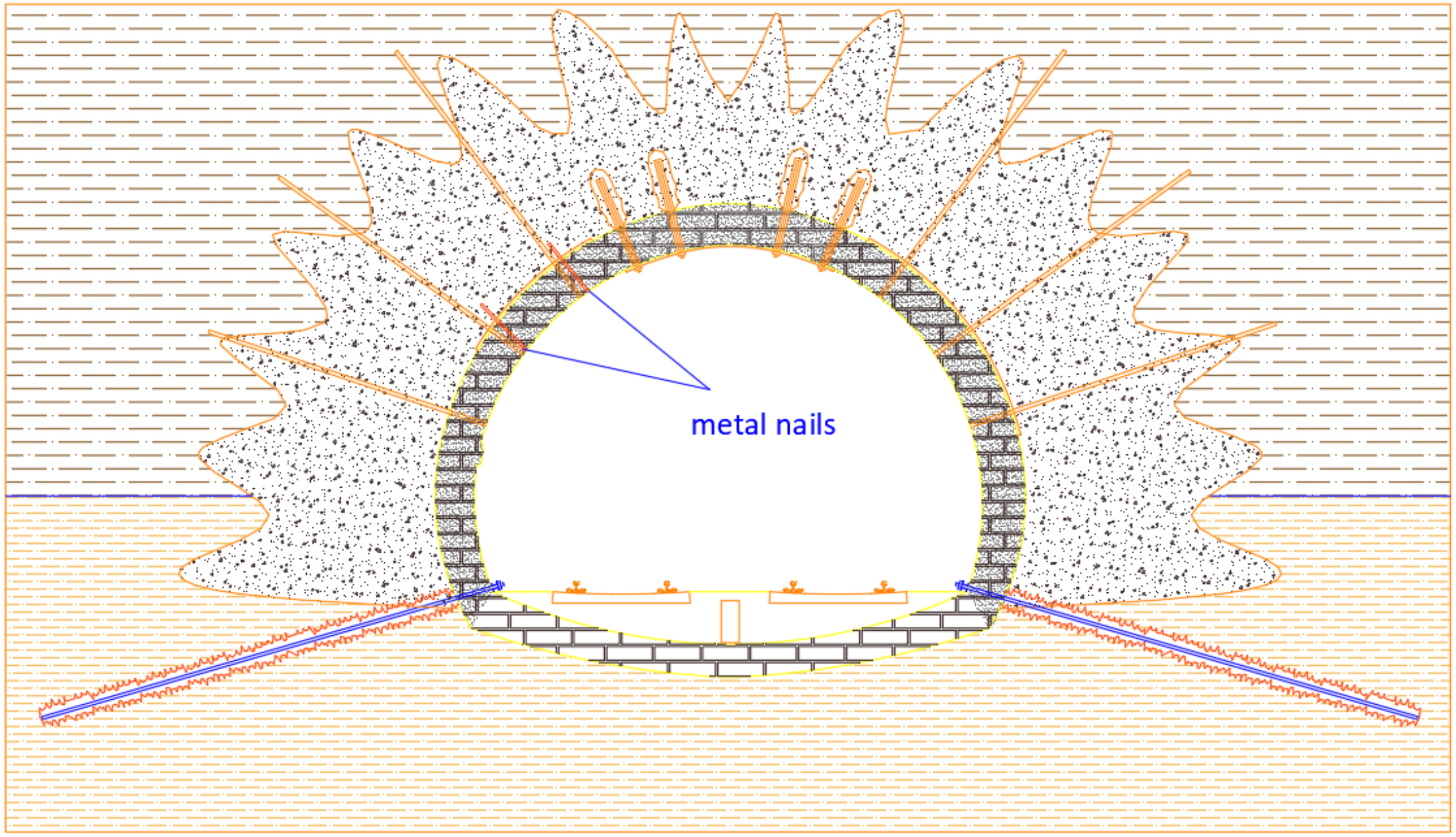
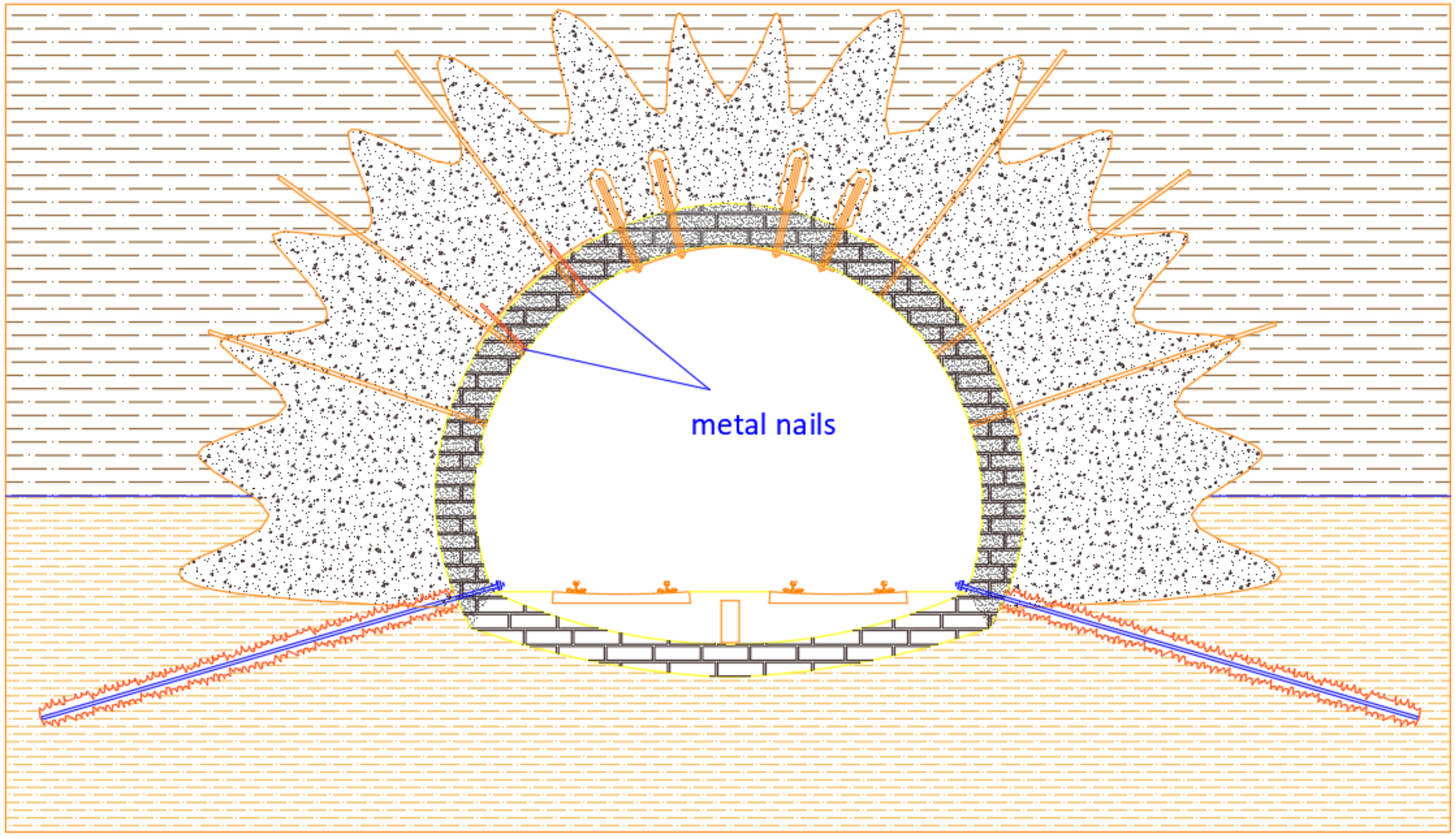
- Installation of additional 100 cm-long metal nails to improve lining strength at the edges of the areas involved by the designed milling works (Figure 19)
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Di Mascio, P.; Loprencipe, G.; Moretti, L. Competition in rail transport: Methodology to evaluate economic impact of new trains on track. In ICTI2014—Sustainability, Eco-Efficiency and Conservation in Transportation Infrastructure Asset Management; Losa, M., Papagiannakis, T., Eds.; Taylor & Francis Group: Abingdon, UK, 2014; pp. 669–675. [Google Scholar]
- Lichtberger, B. Track Compendium: Formation, Permanent Way, Maintenance, Economics; Eurailpress: Hamburg, Germany, 2005; ISBN 3777103209, 9783777103204. [Google Scholar]
- Zhan, D.; Yu, L.; Xiao, J.; Chen, T. Multi-camera and structured-light vision system (MSVS) for dynamic high-accuracy 3D measurements of railway tunnels. Sensors 2015, 15, 8664–8684. [Google Scholar] [CrossRef] [PubMed]
- Di Mascio, P.; Loprencipe, G.; Maggioni, F. Visco-Elastic Modeling for Railway Track Structure Layers. Ing. Ferrov. 2014, 69, 207–222. [Google Scholar]
- Commission Regulation (EU) No 1299/2014 of 18 November 2014 on the Technical Specifications for Interoperability Relating to the ‘Infrastructure’ Subsystem of the Rail System in the European Union Text with EEA Relevance. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32014R1299 (accessed on 10 July 2018).
- Regulation (EU) No 913/2010 of the European Parliament and of the Council of 22 September 2010 Concerning a European Rail Network for Competitive Freight Text with EEA Relevance. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2010:276:0022:0032:EN:PDF (accessed on 10 July 2018).
- Special Report No. 08 of the European Court of Auditors. Rail Freight Transport in the EU: Still Not on the Right Track. Available online: https://www.eca.europa.eu/Lists/ECADocuments/SR16_08/SR_RAIL_FREIGHT_EN.pdf (accessed on 10 July 2018).
- Crozet, Y. Rail freight development in Europe: How to deal with a doubly-imperfect competition? Transp. Res. Procedia 2017, 25, 425–442. [Google Scholar] [CrossRef]
- EN (European Committee for Standardization). ILNAS EN 15273-3+A1:2016. Railway Applications-Gauges-Part 3: Structure Gauges; European Committee for Standardization: Brussel, Belgium, 2016. [Google Scholar]
- Diamantidis, D.; Zuccarelli, F.; Westhäuser, A. Safety of long railway tunnels. Reliab. Eng. Syst. Saf. 2000, 67, 135–145. [Google Scholar] [CrossRef]
- Wang, T.T.; Jaw, J.J.; Hsu, C.H.; Jeng, F.S. Profile-image method for measuring tunnel profile—Improvements and procedures. Tunn. Undergr. Space Technol. 2010, 25, 78–90. [Google Scholar] [CrossRef]
- Klopčič, J.; Ambrožič, T.; Marjetič, A.; Bogatin, S.; Pulko, B.; Logar, J. Use of Automatic Target Recognition System for the Displacement Measurements in a Small Diameter Tunnel Ahead of the Face of the Motorway Tunnel During Excavation. Sensors 2008, 8, 8139–8155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arastounia, M. Automated As-Built Model Generation of Subway Tunnels from Mobile LiDAR Data. Sensors 2016, 16, 1486. [Google Scholar] [CrossRef] [PubMed]
- Chang, C.T.; Sun, C.W.; Duann, S.W.; Hwang, R.N. Response of a Taipei Rapid Transit System (TRTS) tunnel to adjacent excavation. Tunn. Undergr. Space Technol. 2001, 16, 151–158. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Wang, S.; Mei, X.; Yin, W.; Lin, C.; Hu, Q.; Mao, Q. Railway Tunnel Clearance Inspection Method Based on 3D Point Cloud from Mobile Laser Scanning. Sensors 2017, 17, 2055. [Google Scholar] [CrossRef] [PubMed]
- Hugenschmidt, J. Railway track inspection using GPR. J. Appl. Geophys. 2000, 43, 147–155. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, W.; Huang, L.; Vimarlund, V.; Wang, Z. Applications of terrestrial laser scanning for tunnels: A review. J. Traffic Transp. Eng. 2014, 1, 325–337. [Google Scholar] [CrossRef]
- Chmelina, K.; Jansa, J.; Hesina, G.; Traxler, C. A 3-D laser scanning system and scan data processing method for the monitoring of tunnel deformations. J. Appl. Geod. 2012, 6, 177–185. [Google Scholar] [CrossRef]
- Kwon, K.W.; Lee, J.D. 3D Tunnel Shape Fitting by Means of Laser Scanned Point Cloud. J. Korean Soc. Civ. Eng. 2009, 29, 555–561. [Google Scholar]
- Xi, Z.F.C. The Application of the Ground Radar in the Quality Inspection of the Railway Tunnel Lining. Railw. Investig. Surv. 2006, 1, 11. [Google Scholar]
- Jun-Feng, L.M.J. Application of geo-radar technique in test of tunnel quality. Qual. Civ. Eng. Constr. 2007, 3, 7. [Google Scholar]
- Kleinová, E. Does liberalization of the railway industry lead to higher technical effectiveness? J. Rail Transp. Plan. Manag. 2016, 6, 67–76. [Google Scholar] [CrossRef]
- Fekete, S.; Diederichs, M.; Lato, M. Geotechnical and operational applications for 3-dimensional laser scanning in drill and blast tunnels. Tunn. Undergr. Space Technol. 2010, 25, 614–628. [Google Scholar] [CrossRef]
- Han, J.Y.; Guo, J.; Jiang, Y.S. Monitoring tunnel profile by means of multi-epoch dispersed 3-D LiDAR point clouds. Tunn. Undergr. Space Technol. 2013, 33, 186–192. [Google Scholar] [CrossRef]
- Cheng, Y.J.; Qiu, W.; Lei, J. Automatic Extraction of Tunnel Lining Cross-Sections from Terrestrial Laser Scanning Point Clouds. Sensors 2016, 16, 1648. [Google Scholar] [CrossRef] [PubMed]
- Gikas, V. Three-dimensional laser scanning for geometry documentation and construction management of highway tunnels during excavation. Sensors 2012, 12, 11249–11270. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Zhang, Z.; Qi, D.; Liu, Y. Automatic crack detection and classification method for subway tunnel safety monitoring. Sensors 2014, 14, 19307–19328. [Google Scholar] [CrossRef] [PubMed]
- Medina, R.; Llamas, J.; Gómez-García-Bermejo, J.; Zalama, E.; Segarra, M. Crack detection in concrete tunnels using a gabor filter invariant to rotation. Sensors 2017, 17, 1670. [Google Scholar] [CrossRef] [PubMed]
- Göbel, C.; Hellmann, R.; Petzold, H. Georadar-model and in-situ investigations for inspection of railway tracks. In Proceedings of the 5th International Conference on Ground Penetrating Radar, Kitchener, ON, Canada, 12–16 June 1994; pp. 1101–1106. [Google Scholar]
- Walkenbach, J. Excel 2010 Power Programming with VBA (Vol. 6); John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Pestillo, T. Geometria del Profilo Delle Gallerie Ferroviarie: Metodi di Misura, Algoritmi di Verifica e Proposte di Adeguamento. Master’s Thesis, Sapienza University of Rome, Rome, Italy, 2017. [Google Scholar]
- Tommasi, P.; Verrucci, L.; Rotonda, T. Mechanical properties of a weak pyroclastic rock and their relationship with microstructure. Can. Geotech. J. 2014, 52, 211–233. [Google Scholar] [CrossRef]
- UIC Code 506. Rules Governing Application of the Enlarged GA, GB and GC Gauges, 1st ed.; Union Internationale des Chemins de fer: Paris, France, 1987. [Google Scholar]
- Song, G.; Li, W.; Wang, B.; Ho, S.C.M. A review of rock bolt monitoring using smart sensors. Sensors 2017, 17, 776. [Google Scholar] [CrossRef] [PubMed]
- Rizzo, F.; Caracoglia, L.; Montelpare, S. Predicting the flutter speed of a pedestrian suspension bridge through examination of laboratory experimental errors. Eng. Struct. 2018, 172, 589–613. [Google Scholar] [CrossRef]
- Rizzo, F.; Caracoglia, L. Examination of experimental errors in Scanlan derivatives of a closed-box bridge deck. Wind Struct. 2018, 26, 231–251. [Google Scholar]
- Brito Pina, R.; Caracoglia, L. Extraction of Flutter Derivatives from Small-Scale Wind Tunnel Experiments. In Proceedings of the 11th Americas Conference on Wind Engineering, San Juan, Puerto Rico, 22–26 June 2009. [Google Scholar]




© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Loprencipe, G.; Moretti, L.; Pestillo, T.; Ferraro, R. Railway Freight Transport and Logistics: Methods for Relief, Algorithms for Verification and Proposals for the Adjustment of Tunnel Inner Surfaces. Sustainability 2018, 10, 3145. https://doi.org/10.3390/su10093145
Loprencipe G, Moretti L, Pestillo T, Ferraro R. Railway Freight Transport and Logistics: Methods for Relief, Algorithms for Verification and Proposals for the Adjustment of Tunnel Inner Surfaces. Sustainability. 2018; 10(9):3145. https://doi.org/10.3390/su10093145
Chicago/Turabian StyleLoprencipe, Giuseppe, Laura Moretti, Tiziana Pestillo, and Ricardo Ferraro. 2018. "Railway Freight Transport and Logistics: Methods for Relief, Algorithms for Verification and Proposals for the Adjustment of Tunnel Inner Surfaces" Sustainability 10, no. 9: 3145. https://doi.org/10.3390/su10093145