1. Introduction
A heat exchanger is widely existing in sustainable energy systems [
1,
2,
3,
4]. It is generally required to control the outlet temperature, tracking a desired command for economic and safe operation purposes. For example, in a power plant, the outlet temperature of the steam in reheaters and superheaters is essential for the efficiency of the unit and the safety of blades. The most appropriate temperature of water-cooled proton exchange membrane fuel cells (PEMFC) is 343 K [
5], otherwise the proton exchange efficiency will be degraded or even damaged [
6]. Most heat exchangers control the temperature by changing the flow velocity of the working medium because it is the most convenient method compared with structure optimization, changing the physicochemical properties of the medium, and so on. In spite of the convenience, control of the heat exchangers is still challengeable due to the large delay and the difficulty in model identification. In many application cases, effective control of the heat exchanger is an everlasting task that matters.
Recently, various advanced control methods have been widely investigated and applied to control heat exchangers. Oravec [
7] presented novel robust model-based predictive control (MPC) of a heat exchanger, resulting in better control performance. Vasičkaninová [
1] used the neural network predictive controller and the fuzzy controller to control a tubular heat exchanger that is used for the pre-heating of petroleum by hot water. Another work done by Jamal [
8] presented a model of fuzzy logic control combined with neural network techniques. His results showed that control of the fuzzy logic controller was also capable of stabilizing the temperature of the heat exchanger.
However, the authors argued [
9,
10] that, although promising, the advanced controller has a very high hardware cost and is very difficult to realize via basic configuration. Moreover, it is usually challenging to guarantee the synchronization between the controller and the controlled plant because of the huge computation amount [
11]. Therefore, it is unrealistic to commercially implement the advanced controllers in the countless heat exchangers in sustainable industry. On the other hand, the PID controller still occupies the largest share in energy, building, materials industry, and so on, which is now widely recognized by academia [
12,
13,
14,
15,
16]. A new survey conducted in more than 100 boiler-turbine units in Guangdong Province, China, shows that the single-loop PI controller plays a dominant role in the process industry [
17]. Their prevalent use owes much to their simple structure and their requirement of less parameters for tuning [
2,
14], which also exhibit an ideal control performance in practical use. Therefore, it is necessary to develop an efficient PID control strategy for heat exchangers.
Heat exchangers are prevalently described as complex nonlinear systems or even nonanalytic ones [
1]. Moreover, it should be noted that controller tuning is usually based on first-order or second-order models. For example, a well-known method done by Skogestad [
18] starts from reducing complicated models into FOPDT (first order plus delay time) or SOPDT. A widely accepted setting derived by Ho and Hang [
19] based on gain and phase margin specification is designed for FOPDT. Sun [
17] proposes a new robustness measurement called the relative delay margin, which is designed for FOPDT models. Note that low-order models of FOPDT or SOPDT can also efficiently describe the dynamic characteristics of high-order linear models for the purpose of PID controller tuning [
20,
21]. The dilemma between the model of the heat exchanger and the foundation of the PID tuning method impels us to work out an effective method for heat exchanger model identification.
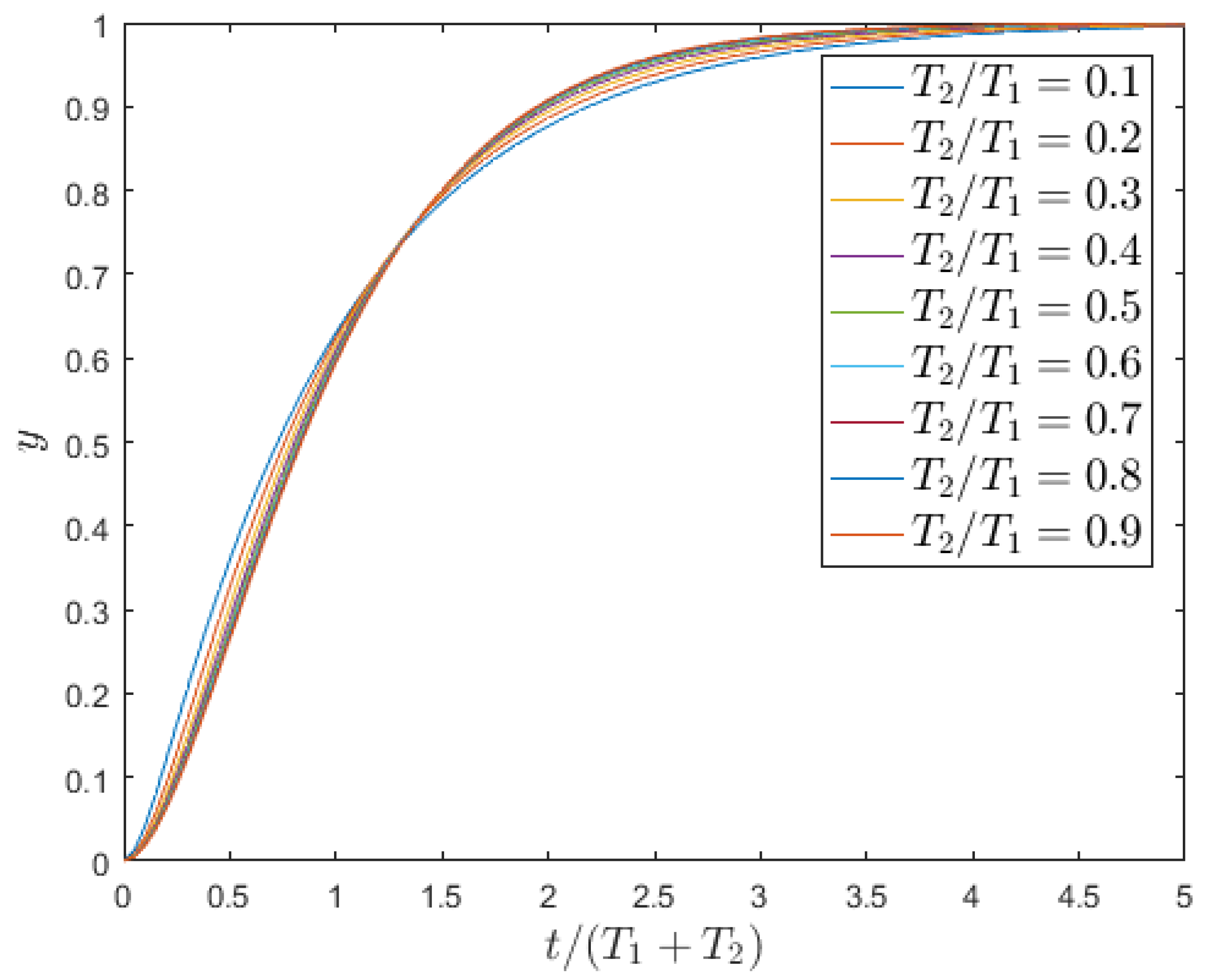
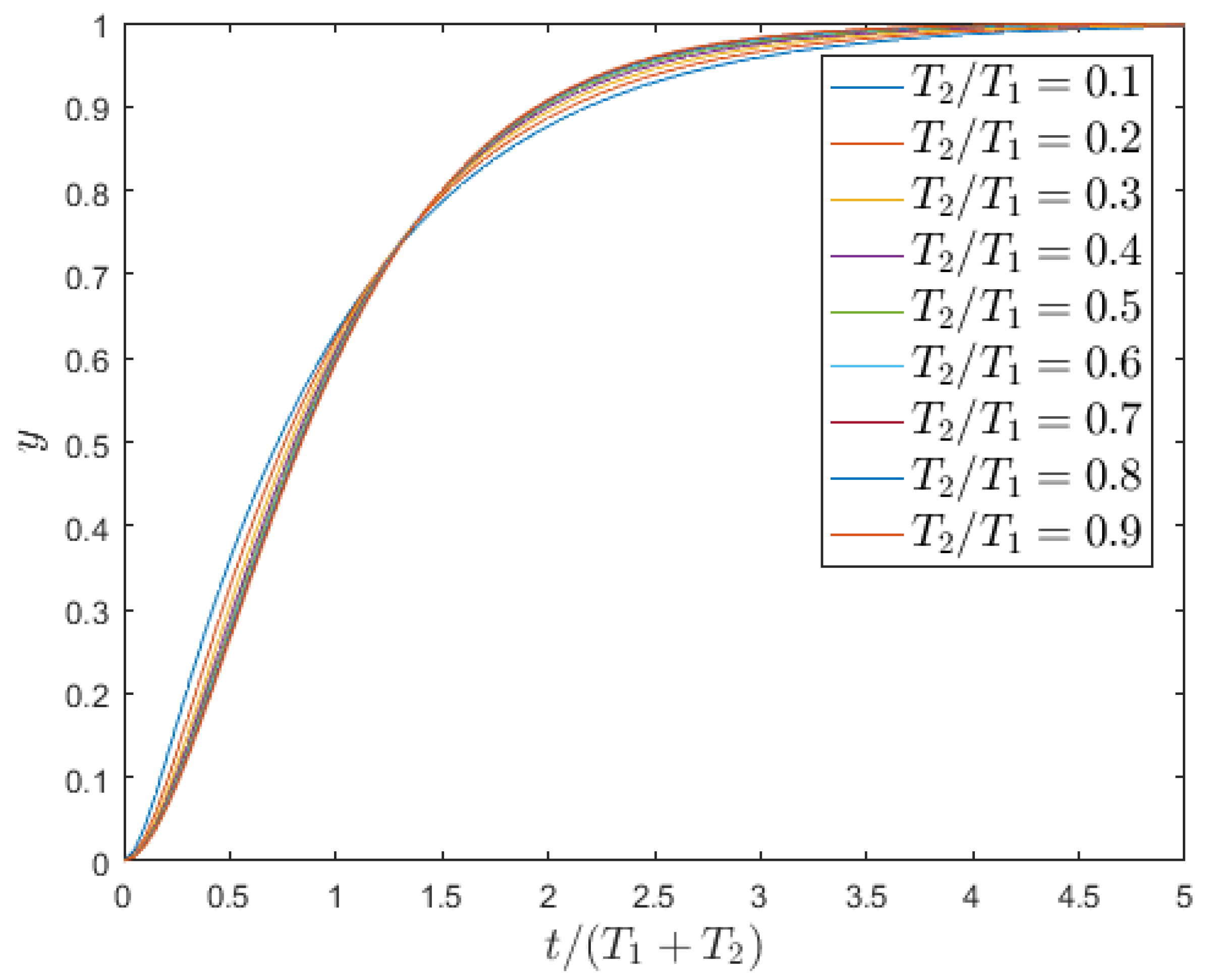
Motivated by this target, we propose a simple but efficient method to describe a heat exchanger system as SOPDT for the purpose of PID parameters tuning. The starting point is trying to approximate the systematic responses before and after identification. By regarding a standard heat exchanger as a SOPDT model, our target is converted to SOPDT model identification. Among all signals adopted for identification, the step response is the most widely applied given its simplicity [
22]. The conventional two-point identification method [
23,
24] can roughly estimate the parameters of SOPDT. However, as shown in
Figure 1, the open-loop step responses of general second-order models are converging. Thus, critical points on the open-loop step response curve are illegible. Moreover, high-frequency noise exiting in industry processes unavoidably interferes with information acquisition [
25]. Thus, solely relying on the time domain analysis may lead to a low identification precision.
In this paper, a hybrid time and frequency domain method is proposed for heat exchanger identification. A dimensionless time is introduced to simplify the open-loop step response of the SOPDT model. The periodic characteristic of the frequency domain response can reduce error. Compared with traditional identification methods, such as “tangent line” and “two-point” methods, our method shows a higher approximation of the open-loop step response, especially under the existence of noise.
The remainder of the paper is organized as follows: The preliminary results such as the dimensionless step response are given in
Section 2. Steps of SOPDT model identification and high-order model reduction are proposed in
Section 3. In
Section 4, illustrative simulations for identification show the validity of the method. Control simulation of the heat exchanger is given in
Section 5. Practical implementation of the real heat exchanger experimental control system confirms the effectiveness of the method in
Section 6. The discussion and conclusion parts are given in
Section 7 and
Section 8, respectively.
Appendix A is shown at the end to give some detailed calculation information. All symbols and abbreviations are declared in
Appendix B.
2. Preliminary Results
The process model of second-order without delay time is:
where
is the plant gain, and
and
are lag constants. For a stable system,
,
, and
are positive values.
The Laplace transfer of open-loop step response is:
where
is the step amplitude. The value of
can be determined by the open-loop step response:
And a time domain expression of Equation (2) is:
From Equation (4), we see that the open-loop step response is determined by three parameters:
,
, and
. Motivated by simplifying complicated formula by introducing a dimensionless variable, we apply a dimensionless time variable
. Therefore, a dimensionless expression of the open-loop step response can be derived as:
Note that the open-loop output
merely relies on the value of
, rather than
,
and
. In other words, when
and
are fixed,
only has a unique value. Therefore, keeping
and
as constants, a series of open-loop step response curves are obtained within the increase of
from 0 to
. Meanwhile, the corresponding value of dimensionless time
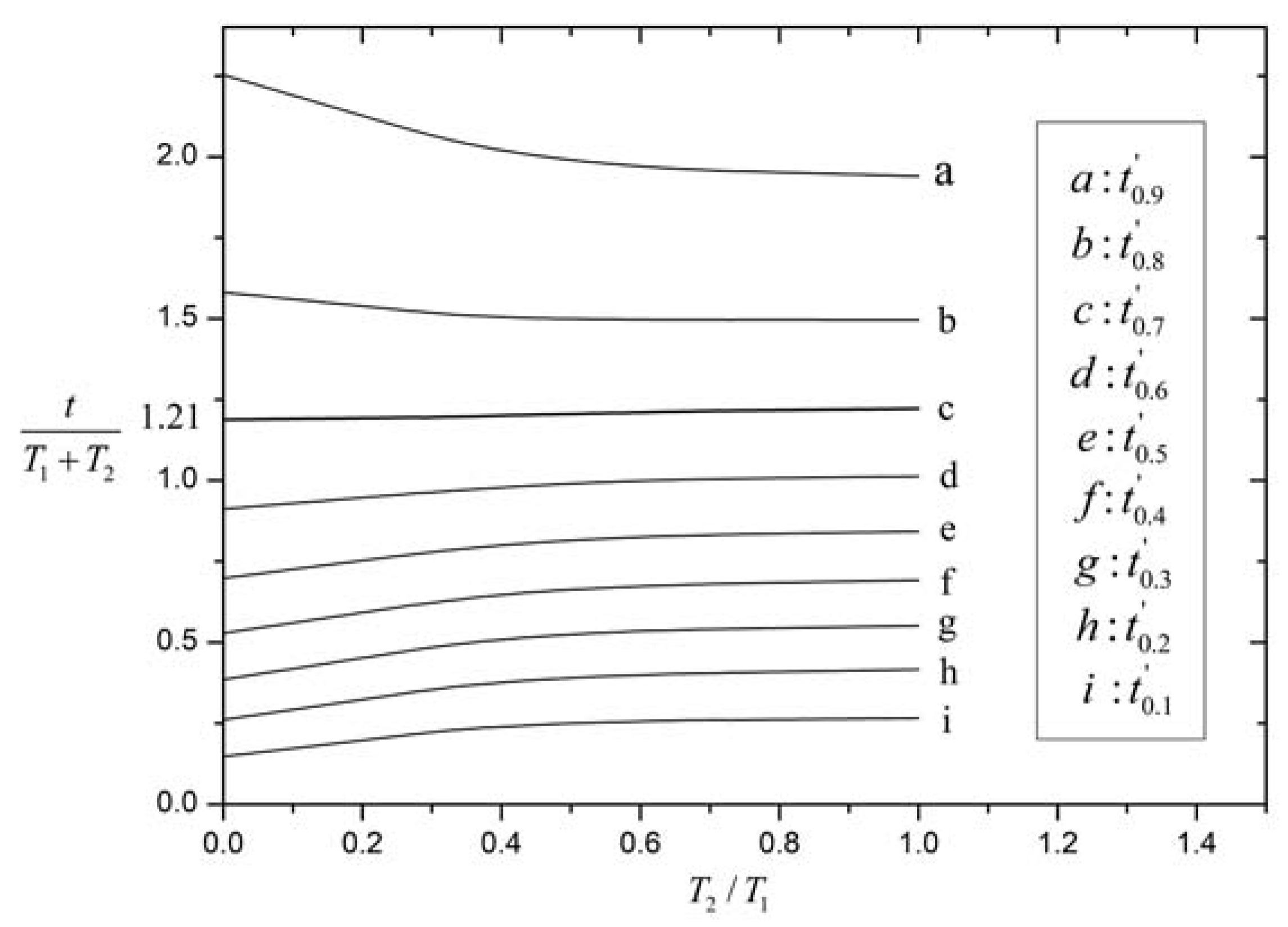
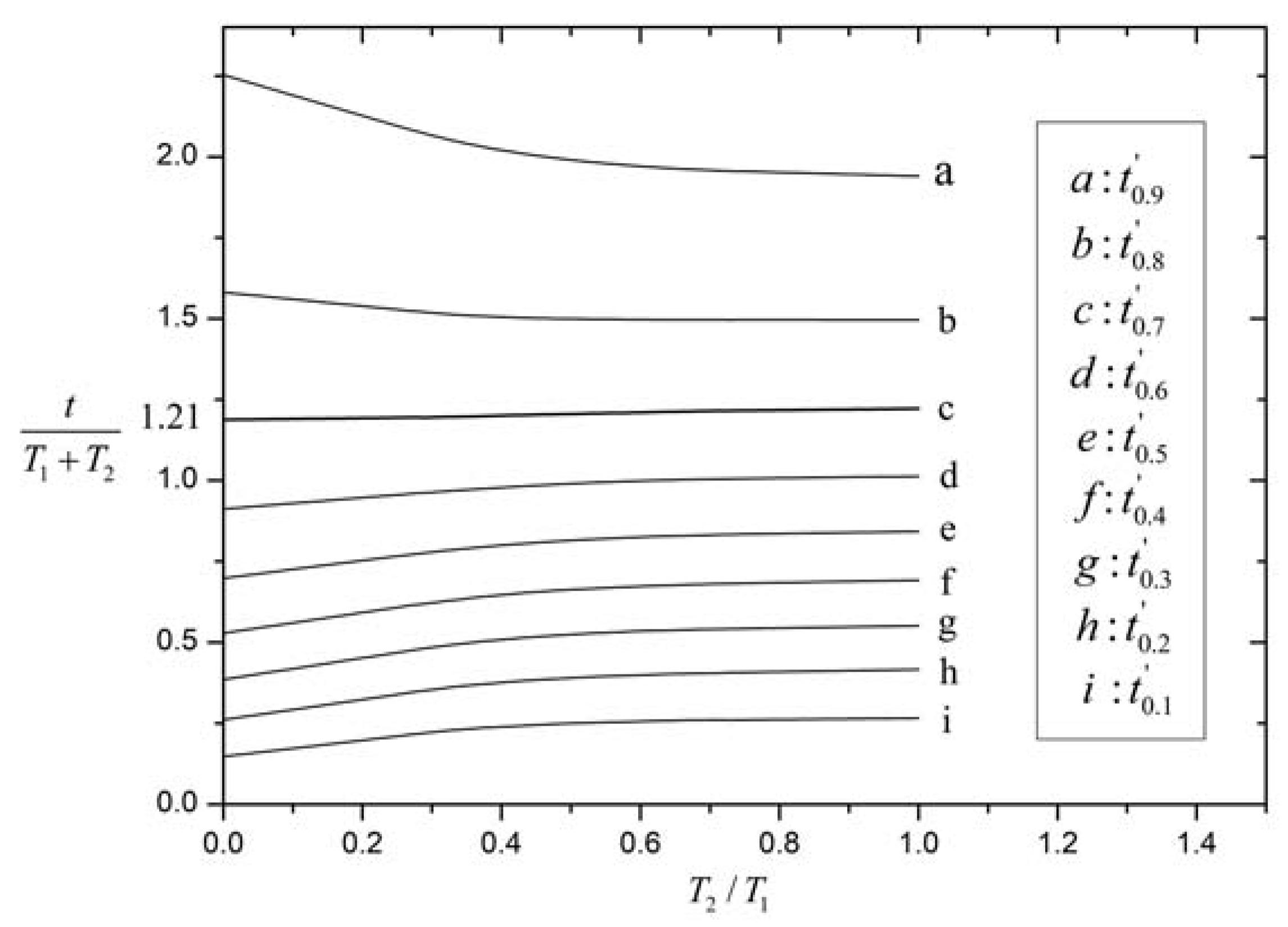
is derived. Thus, a series of curves can be drawn according to different output amplitudes, as shown in
Figure 2.
Figure 2 is denoted as
, where
represents the corresponding time of
in
. Among nine curves,
is the closest one to a horizontal line. By regarding it as a straight line, we can get an approximation formula:
Consequently, the sum of lag time constants can simply be derived from the formula. Together with a frequency domain analysis presented in the next section, all parameters will be covered. The accuracy and superiority are also given in the following part.
3. Identification and Model Reduction
In this section, simple but accurate procedures for parameter estimation and model reduction are presented.
3.1. Identification of SOPDT Model
A second-order plus delay time (SOPDT) model is the oriented form for complicated system reduction. It is also the starting point that is widely used in controller tuning. However, the prevalently exiting high-frequency noise in the industrial process causes a low identification accuracy, especially the delay time . Under this circumstance, we proposed a method based on time and frequency analysis that improves the precision. Particularly, the frequency analysis is mainly based on Nyquist criterion.
The model of second-order with time delay system is:
where
is the plant gain,
and
are the lag time constants, and
is the delay time. The recognition of
is the same as Equation (3). We still need three equations of
,
, and
for solving the problem.
Compared with the second-order without time delay model, the open-loop step response of second-order with time delay actually makes a
unit translation toward
axis. Firstly, we get the
value by roughly reading the open-loop step response. Then, substitute the estimated value of
into Equation (8):
where the definition of
is the same as described above. Equation (8) is the first relation of
,
, and
derived from the open-loop step response.
Next, we consider applying Nyquist criterion to the procedure. Therefore, we make a close-loop proportional controlled system, as shown in
Figure 3.
is the expression of the proportional controller,
is the input, and
the output. When inputting the unit step signal into the system, the output
changes with different proportional gains
. With an exact
, output
will exhibit oscillations with an equal amplitude. In this case, the system is under critical circumstance, which means that the open-loop Nyquist curve exactly goes through
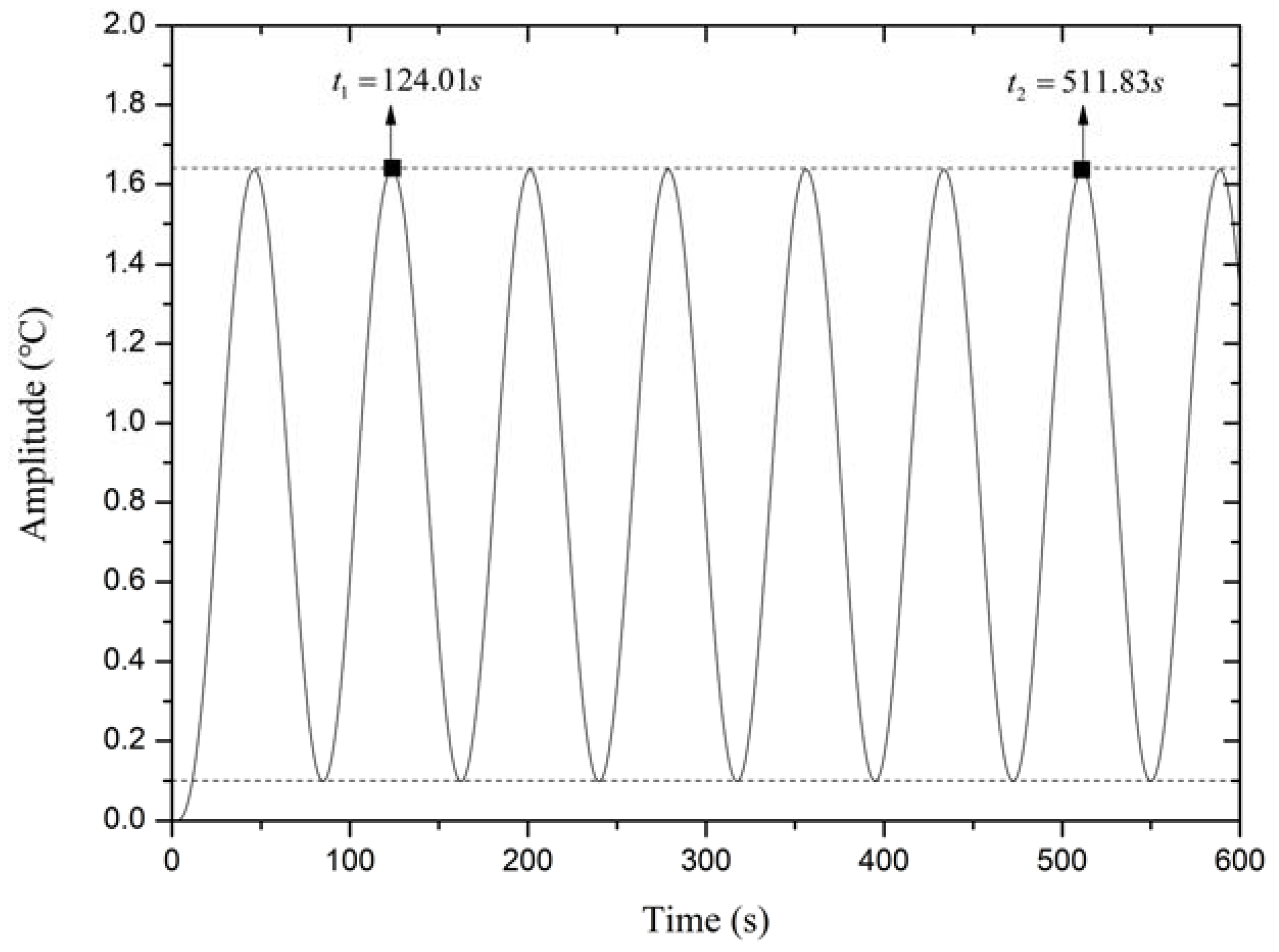
on the negative coordinate. Hence, Nyquist criterion works in this situation as Equations (9) and (10),
where
is the critical oscillation frequency that can be derived from the oscillation period
with
. A simplified expression of Equation (9) is given as Equation (11):
By substituting , , and into Equation (11), we can get the value of and by solving the equation set.
Nevertheless, although all parameters are identified, the value of is too rough. In other words, Equation (10) may not establish. Therefore, we propose an iteration method that is based on the adjustment of . The general interval of is limited by solving Equation (11). An empirical rule is: when or is negative, may be far too big. But if or is imaginary, may be too small. After and are all positive numbers, another rule comes when one substitutes the value into Equation (10): if , reduce . Otherwise, increase . In a word, during the process, one should strive to make as close to 1 as possible based on established Equations (8) and (9).
3.2. High-Order Model Reduction
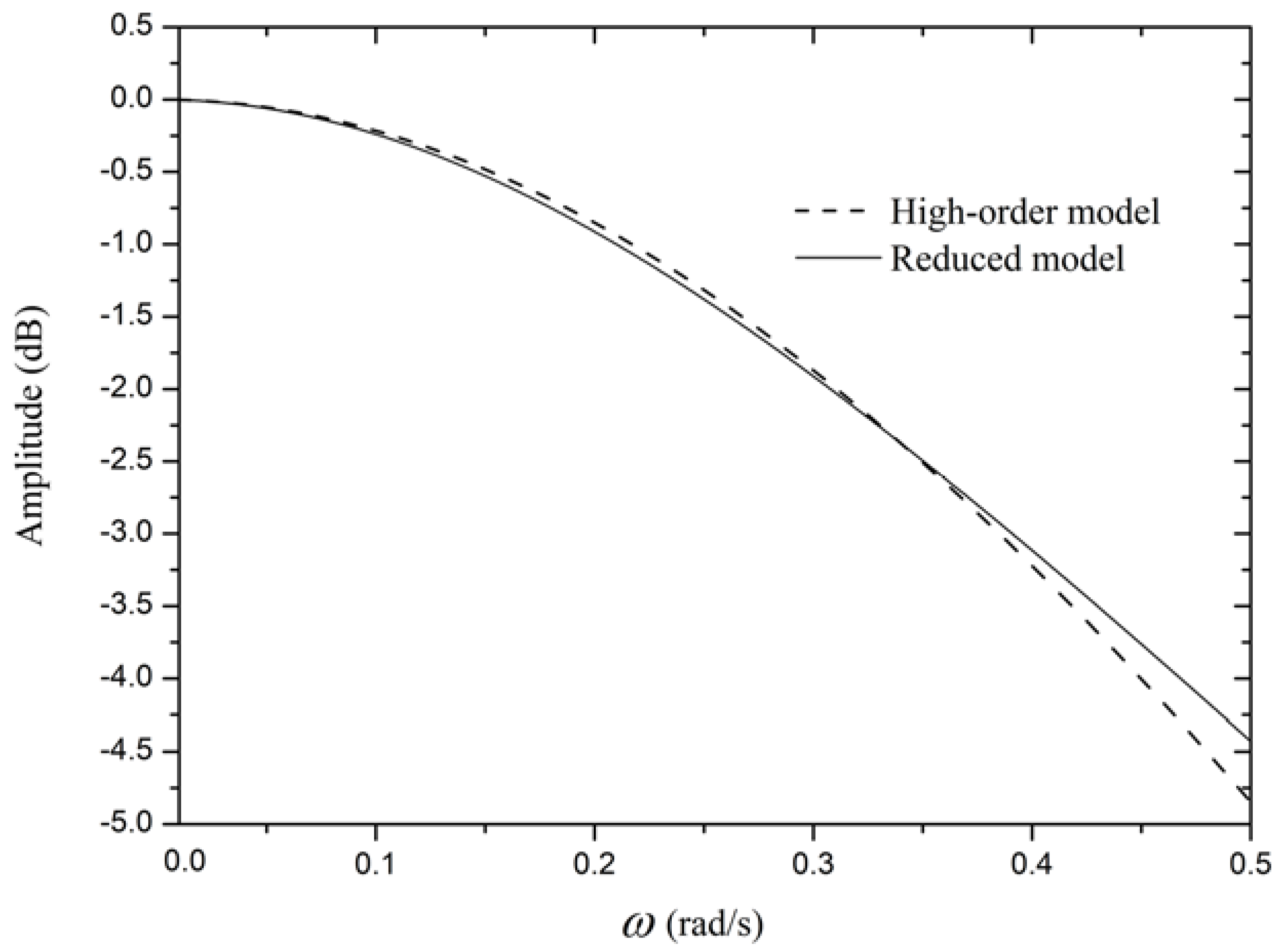
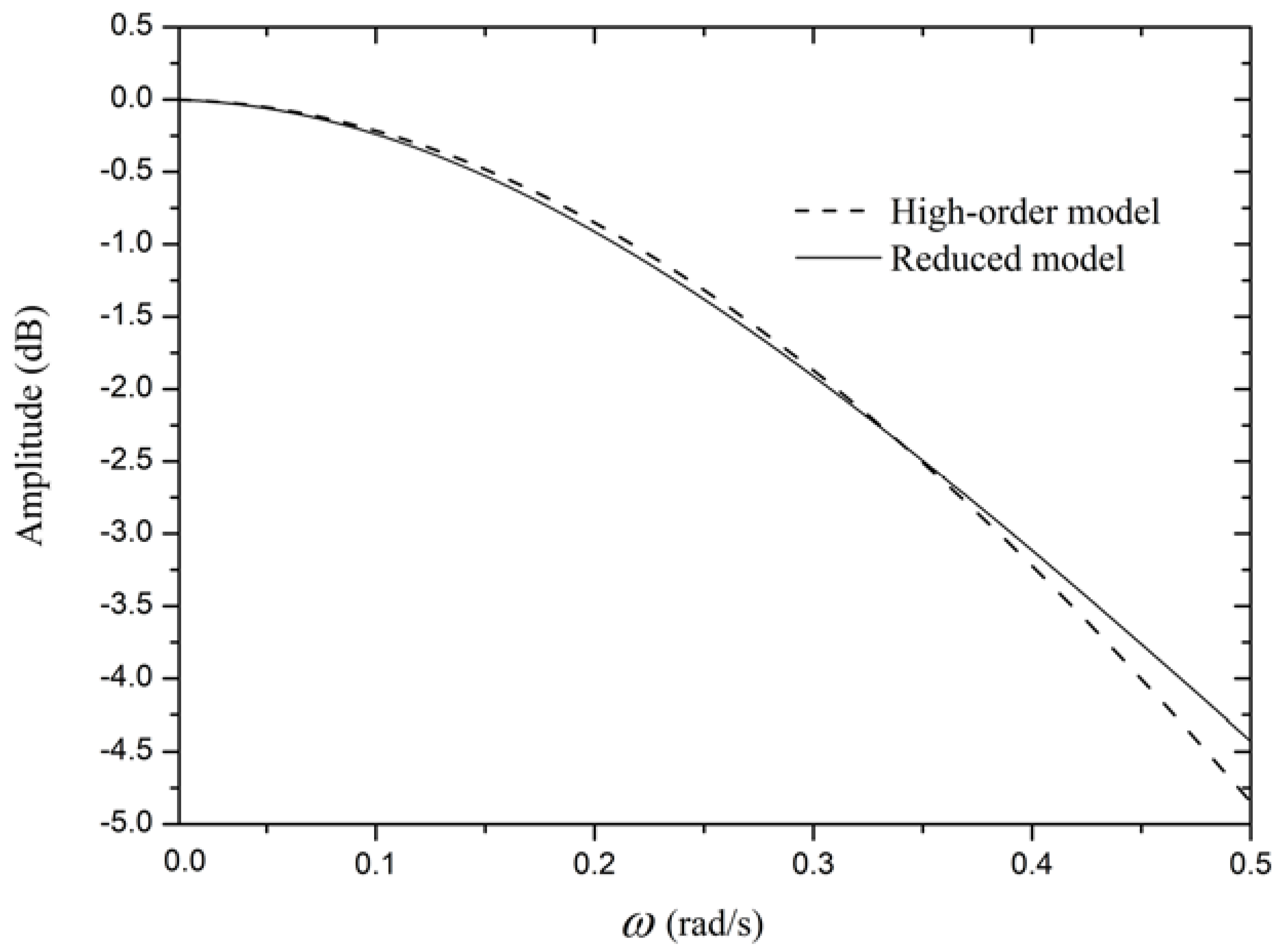
Most PID controller tuning methods are based on FOPDT or SOPDT models. However, heat exchangers are prevalently described as high-order models or even more complicated. Thus, developing a convenient and effective reduction method is imperative. The efficiency is evaluated by the original systematic controlled performance, where the controller parameters are tuned based on the reduced model. Also, a high similarity of the open-loop step response and Bode figure before and after reduction indicates a reasonable validity.
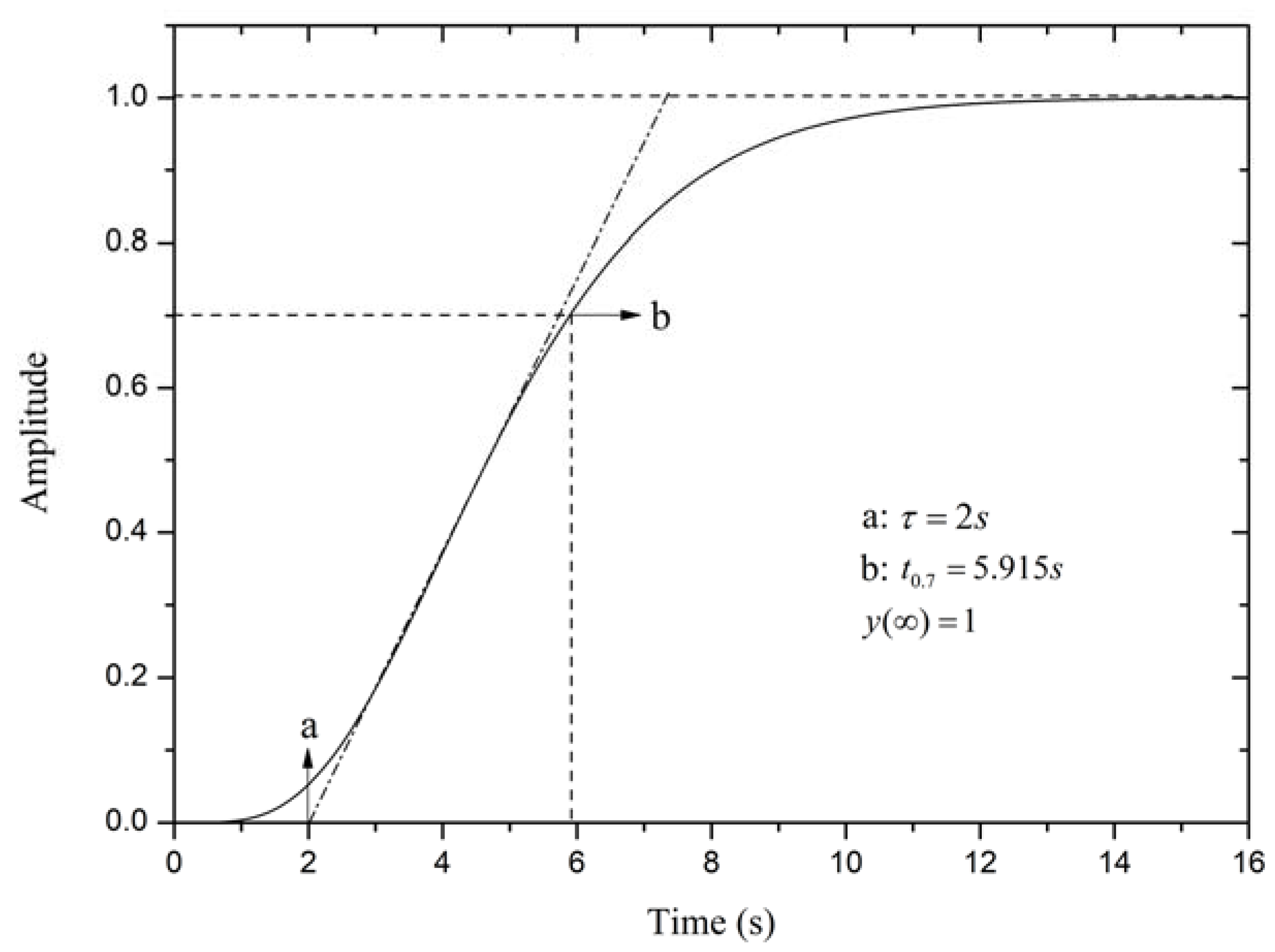
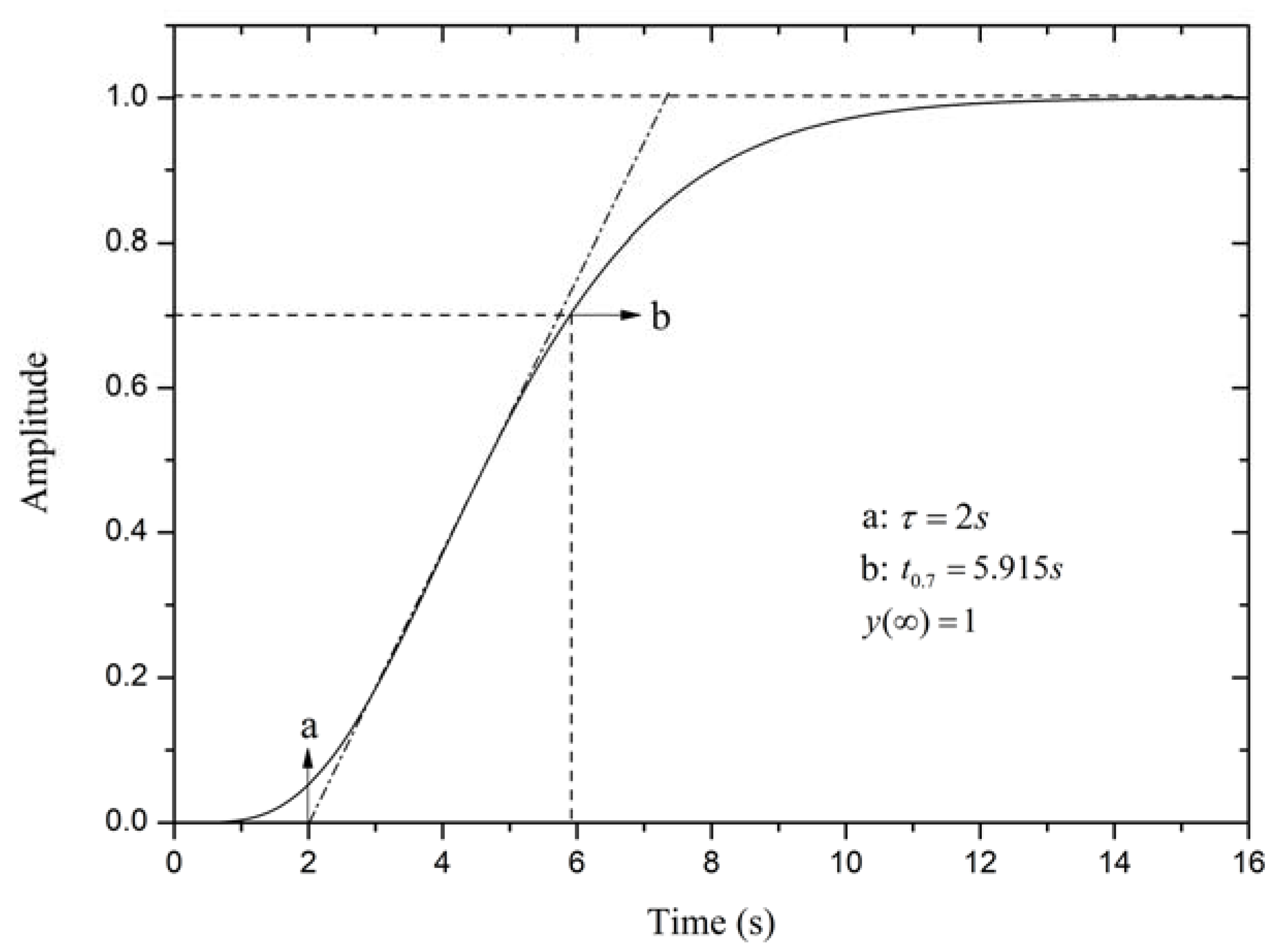
Herein, we propose a hybrid reduction method that is mainly aimed at high-order systems. Our starting point is regarding the heat exchanger system as an SOPDT in order to convert the reduction problem into parameter estimation. Therefore, the procedure is almost the same as SOPDT identification. Above all, a proper initial value of
is of great importance and will influence the subsequent calculation. We recommend that an appropriate
should be near to the systematic delay time, whose definition is the corresponding time to the intersection point of abscissa and tangent line at the inflection point. A detailed example will amply illustrate the steps of system reduction, which is given in
Section 4 Part 2.
5. Control Simulation of Heat Exchanger
Vasičkaninová and Bakošová [
26] introduce a third-order plus delay time model for a heat exchanger, which is represented by:
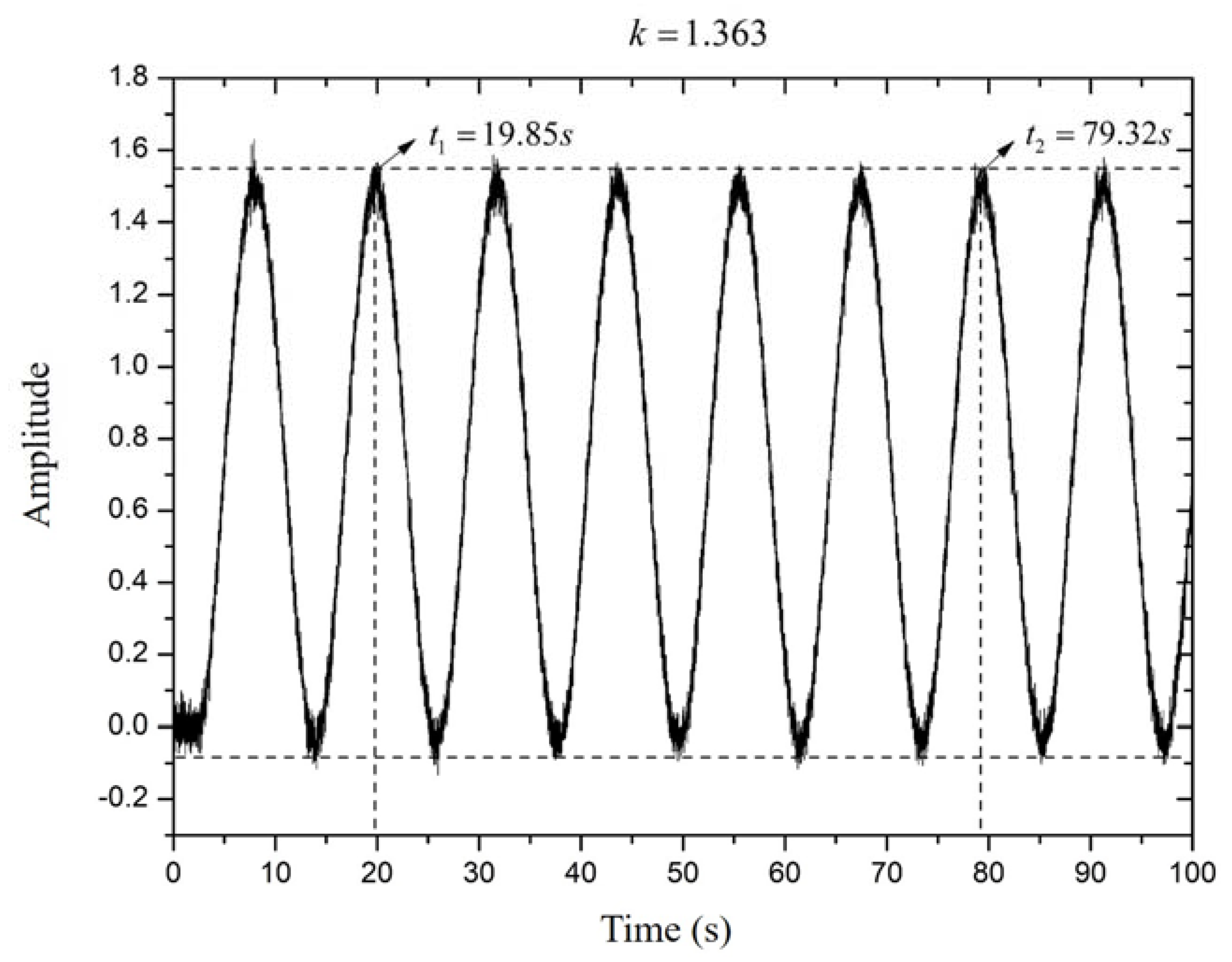
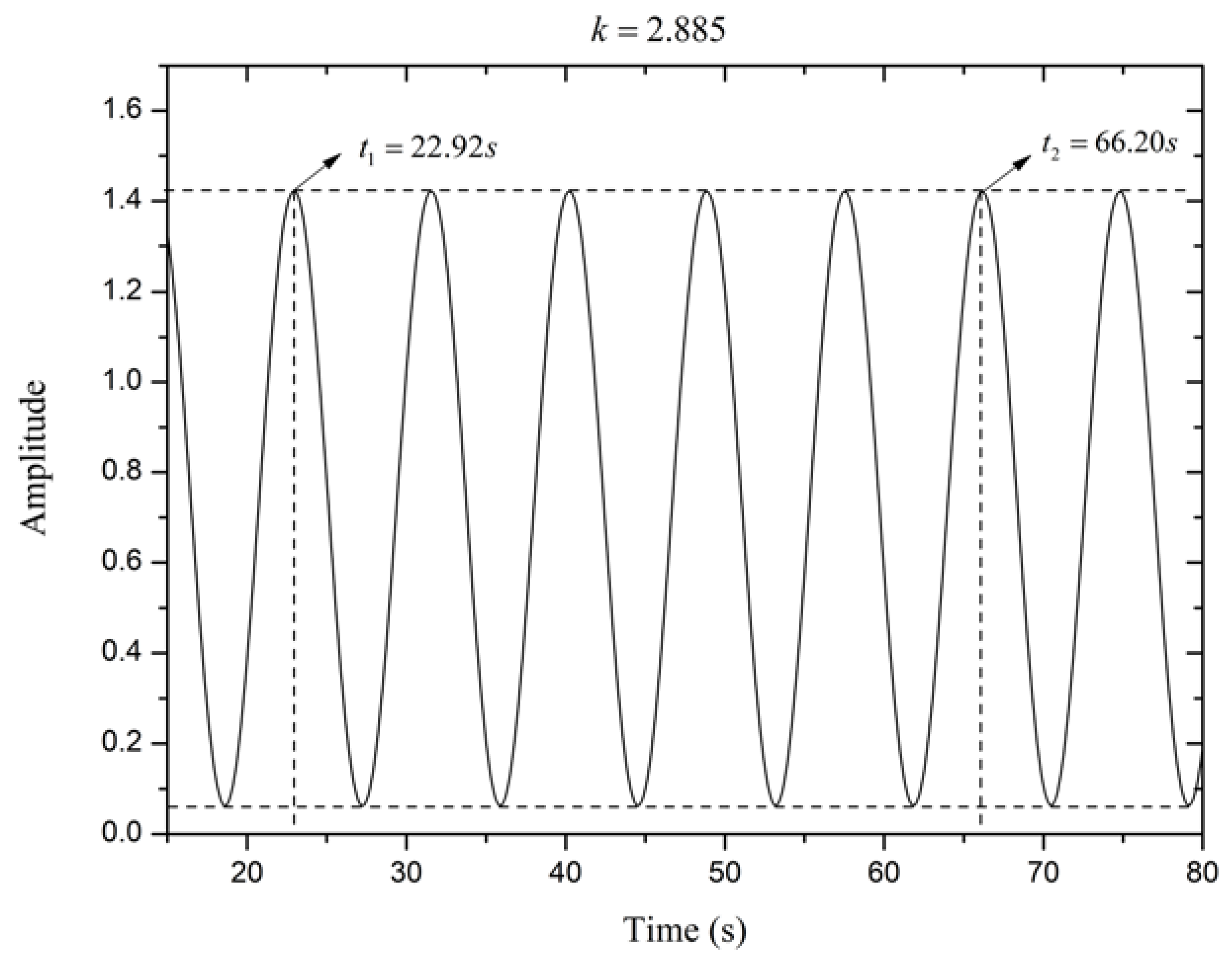
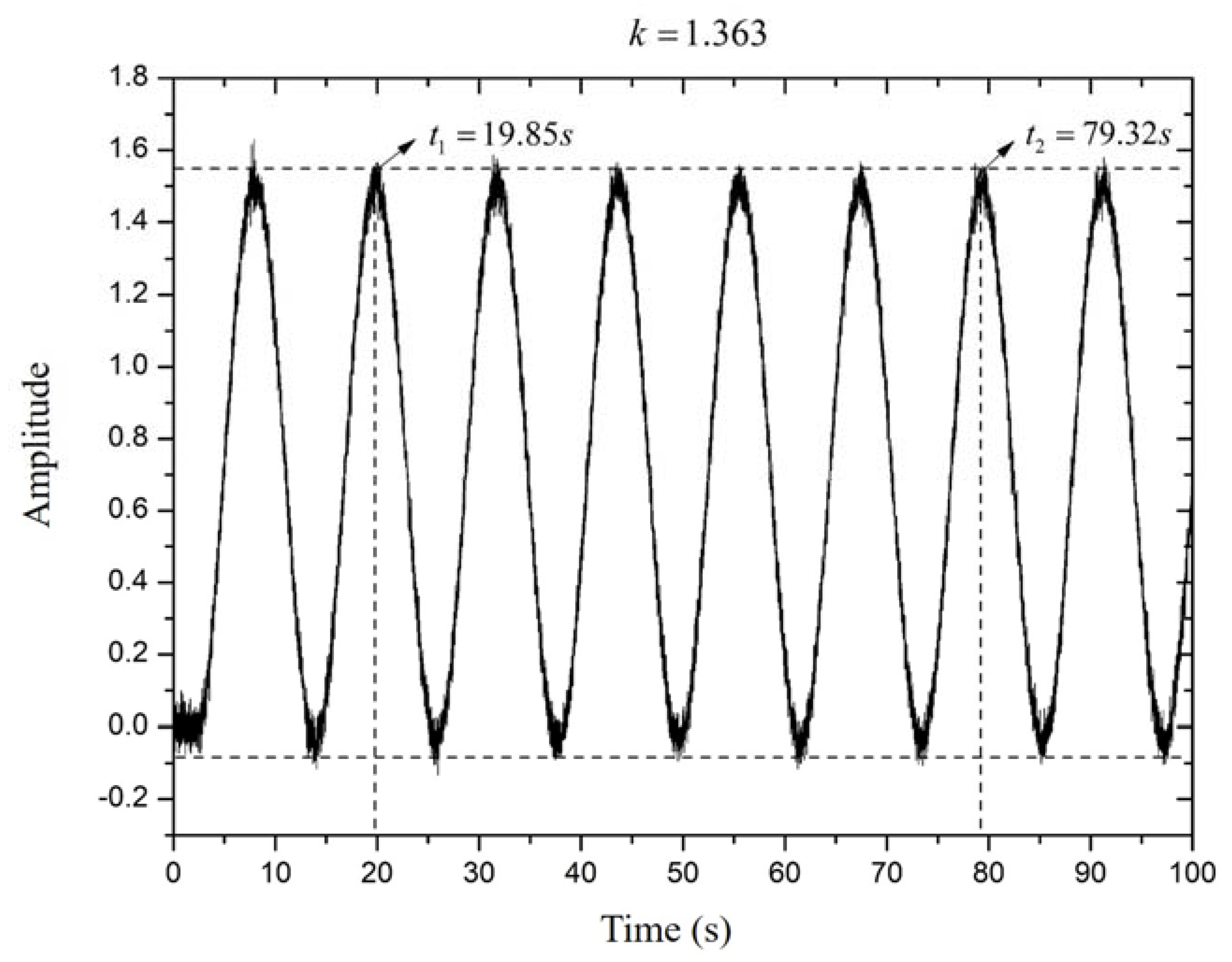
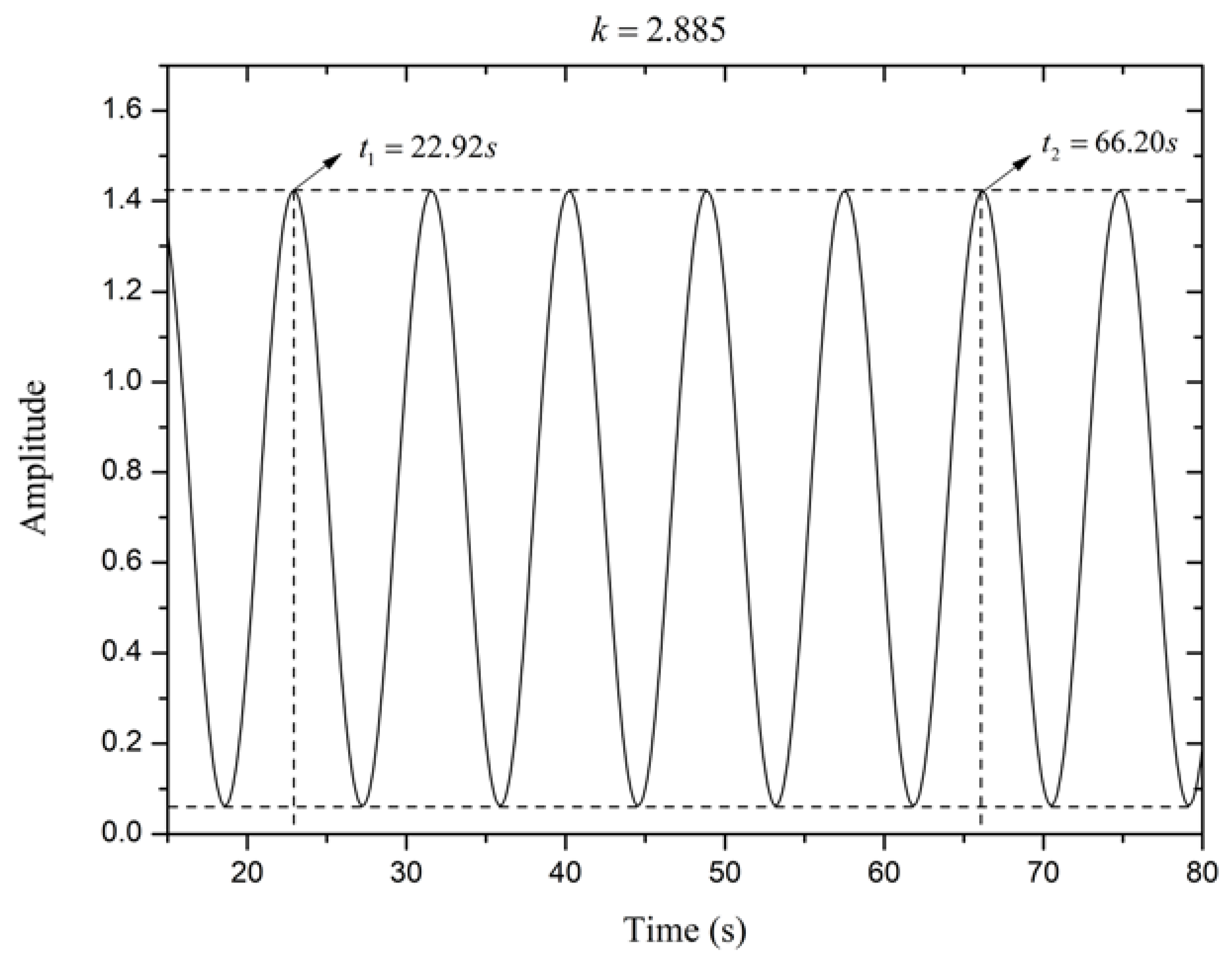
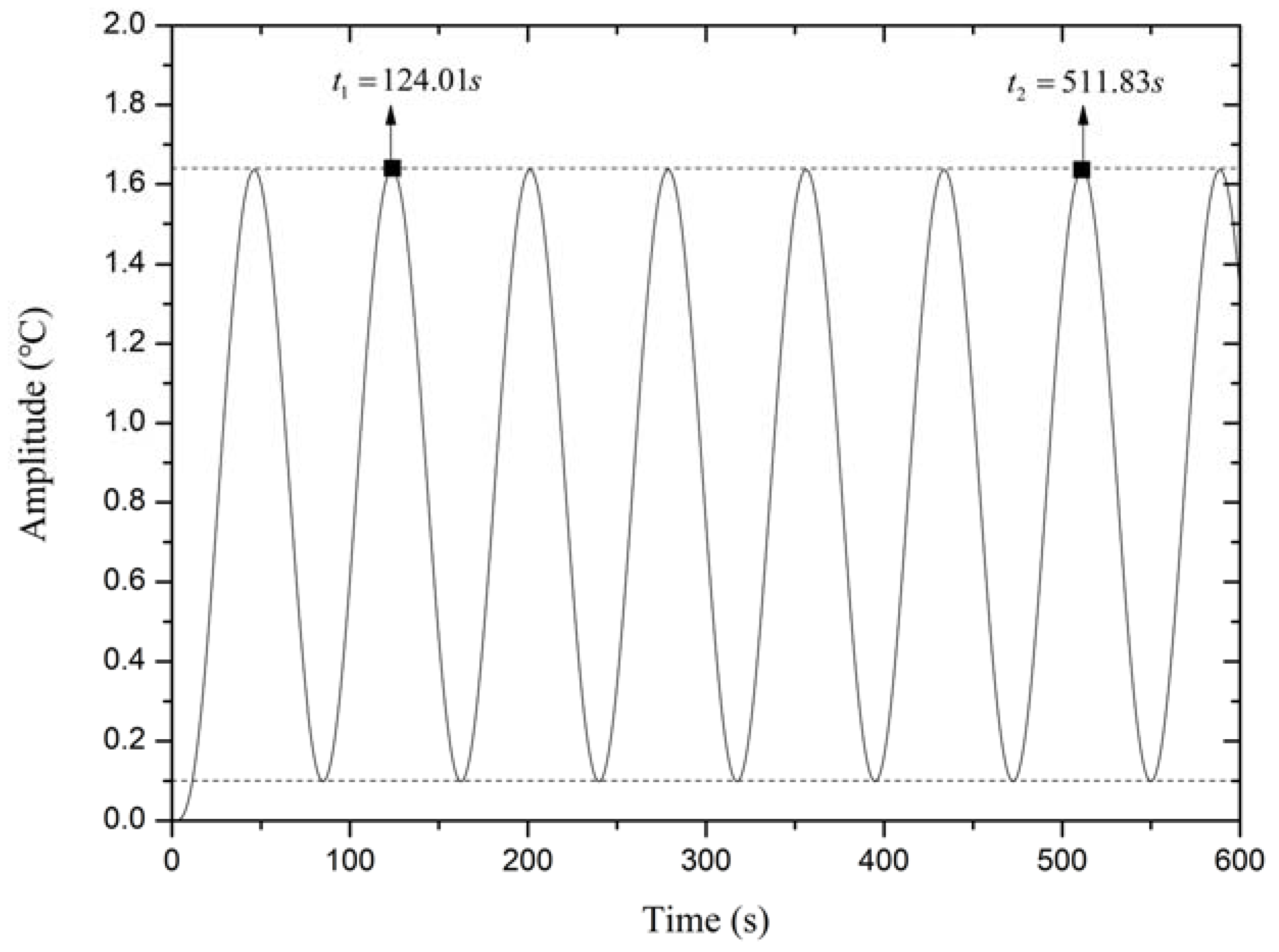
The critical proportional gain that leads to equal-amplitude oscillation is 1.224. The critical oscillation frequency
is obtained from
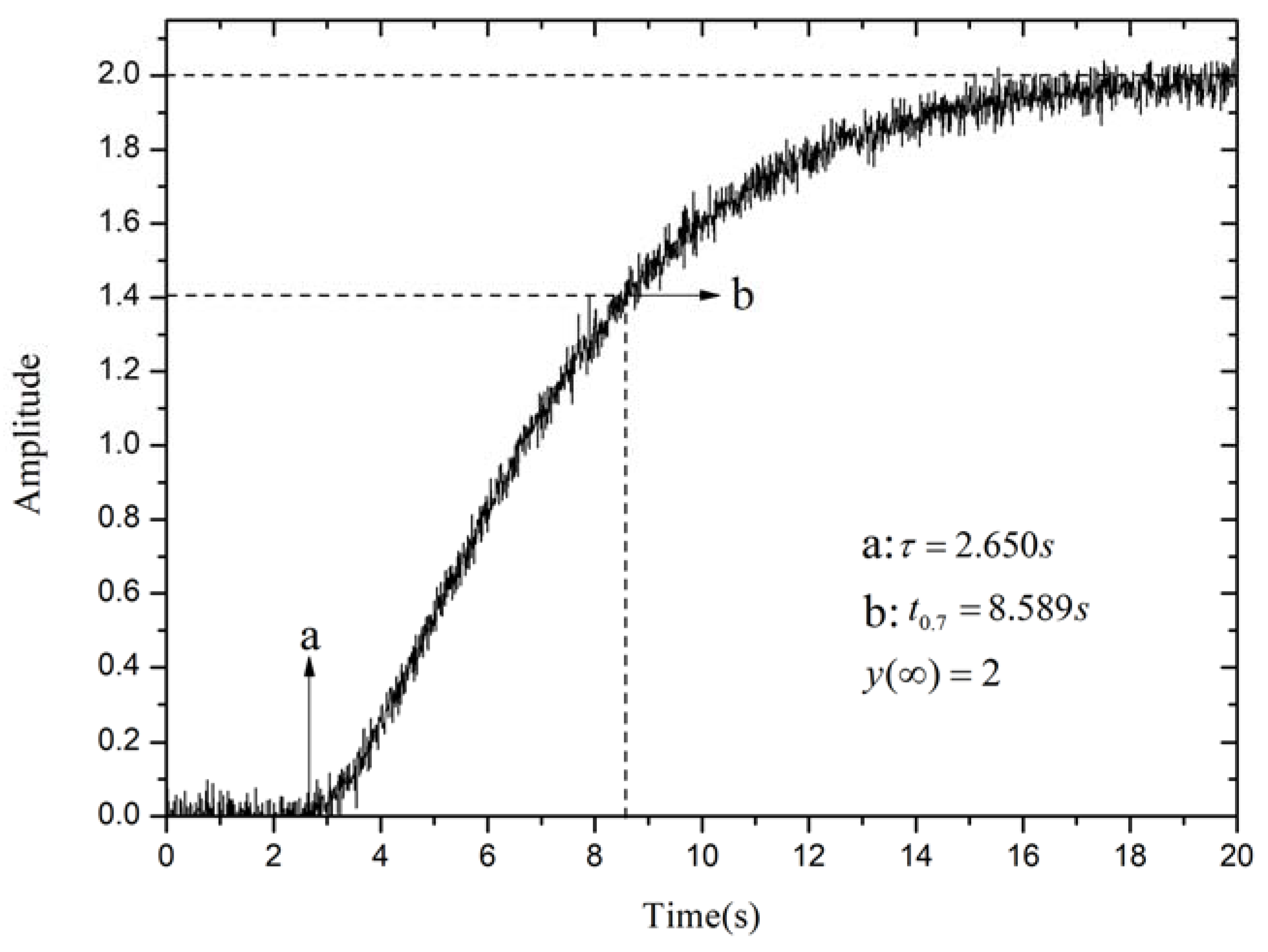
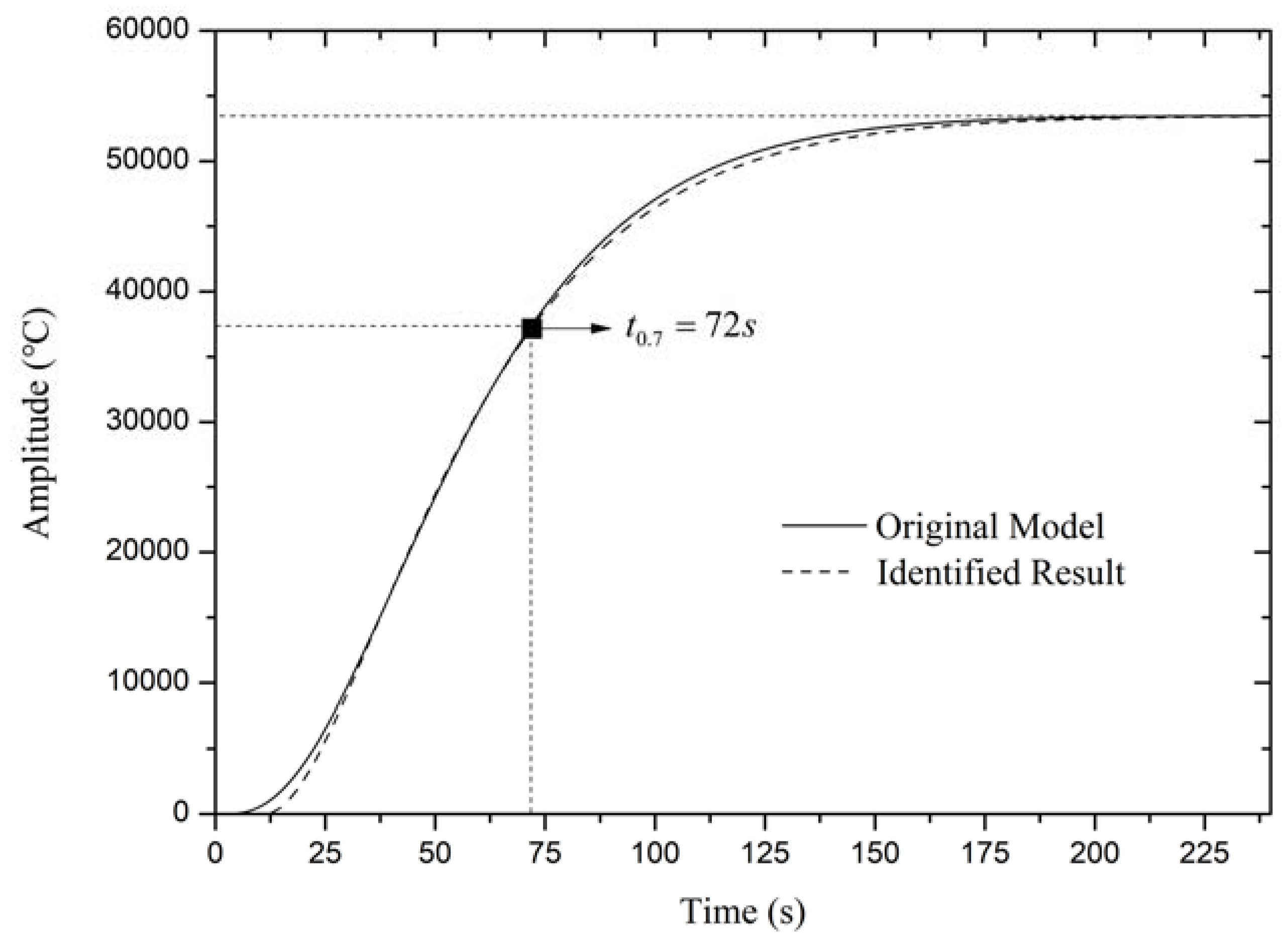
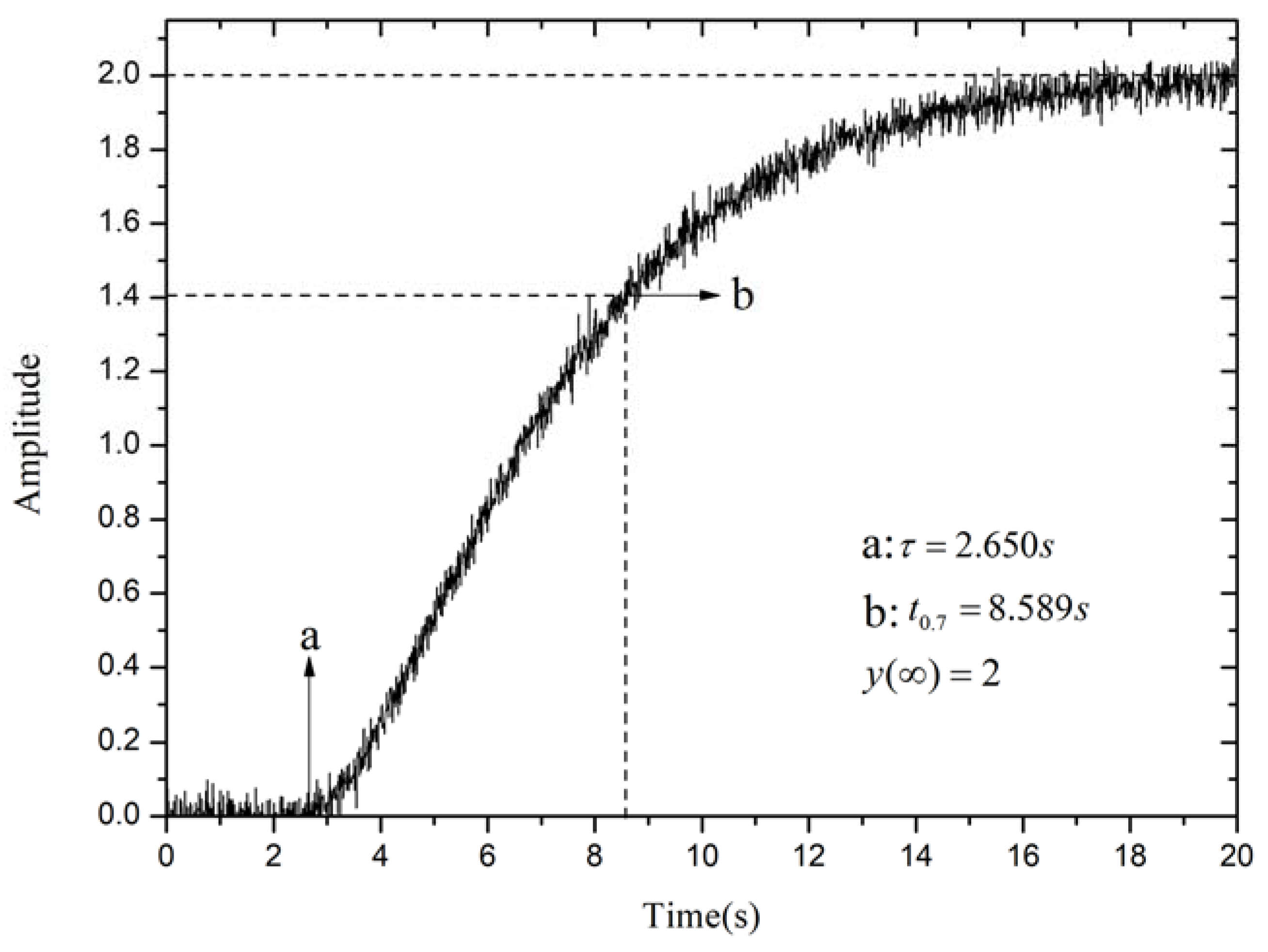
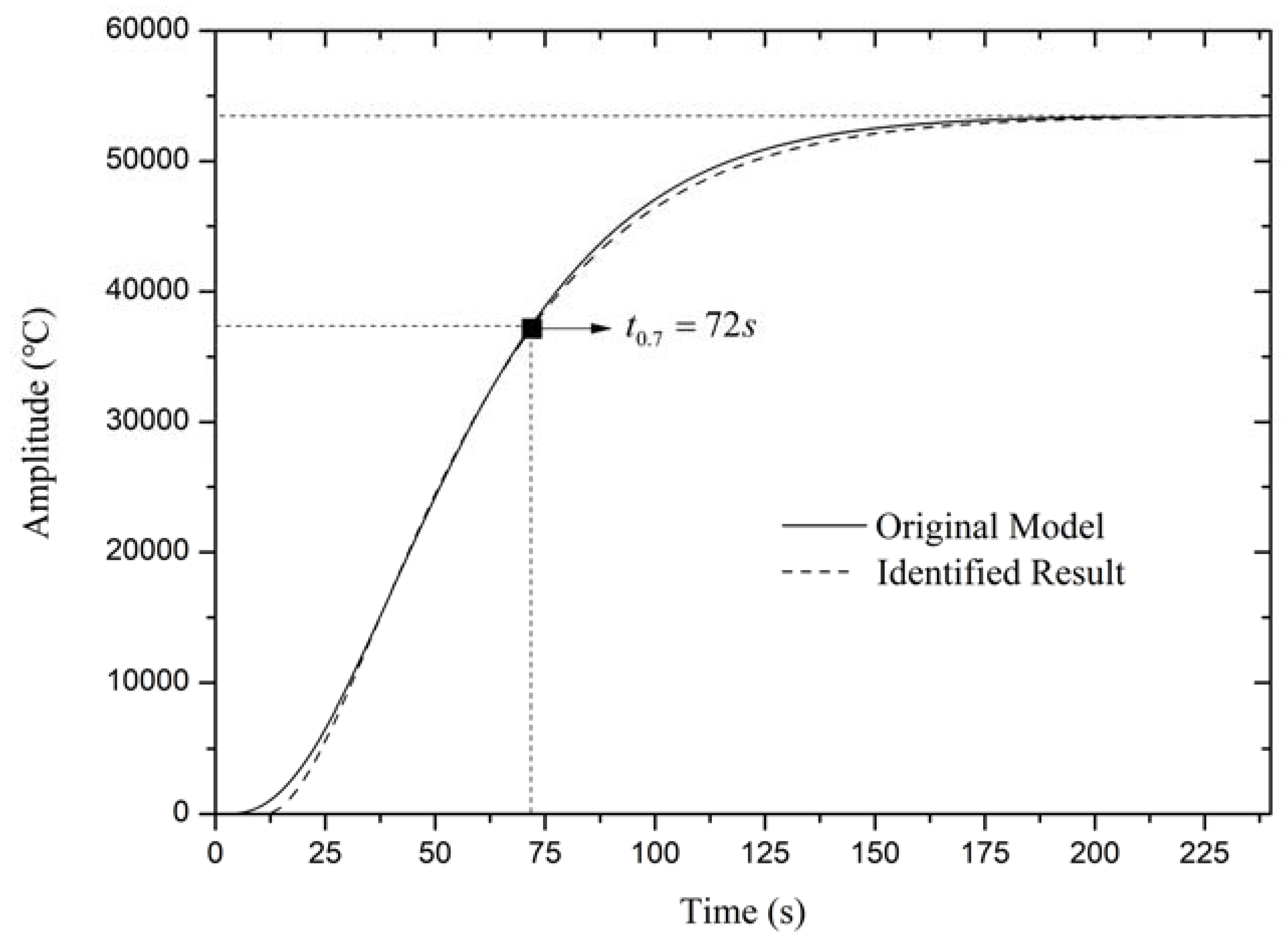
Figure 12. The open-loop unit step response is depicted in
Figure 13 with a solid line, where we can get
and
. Thus, the identified SOPDT model for the heat exchanger is:
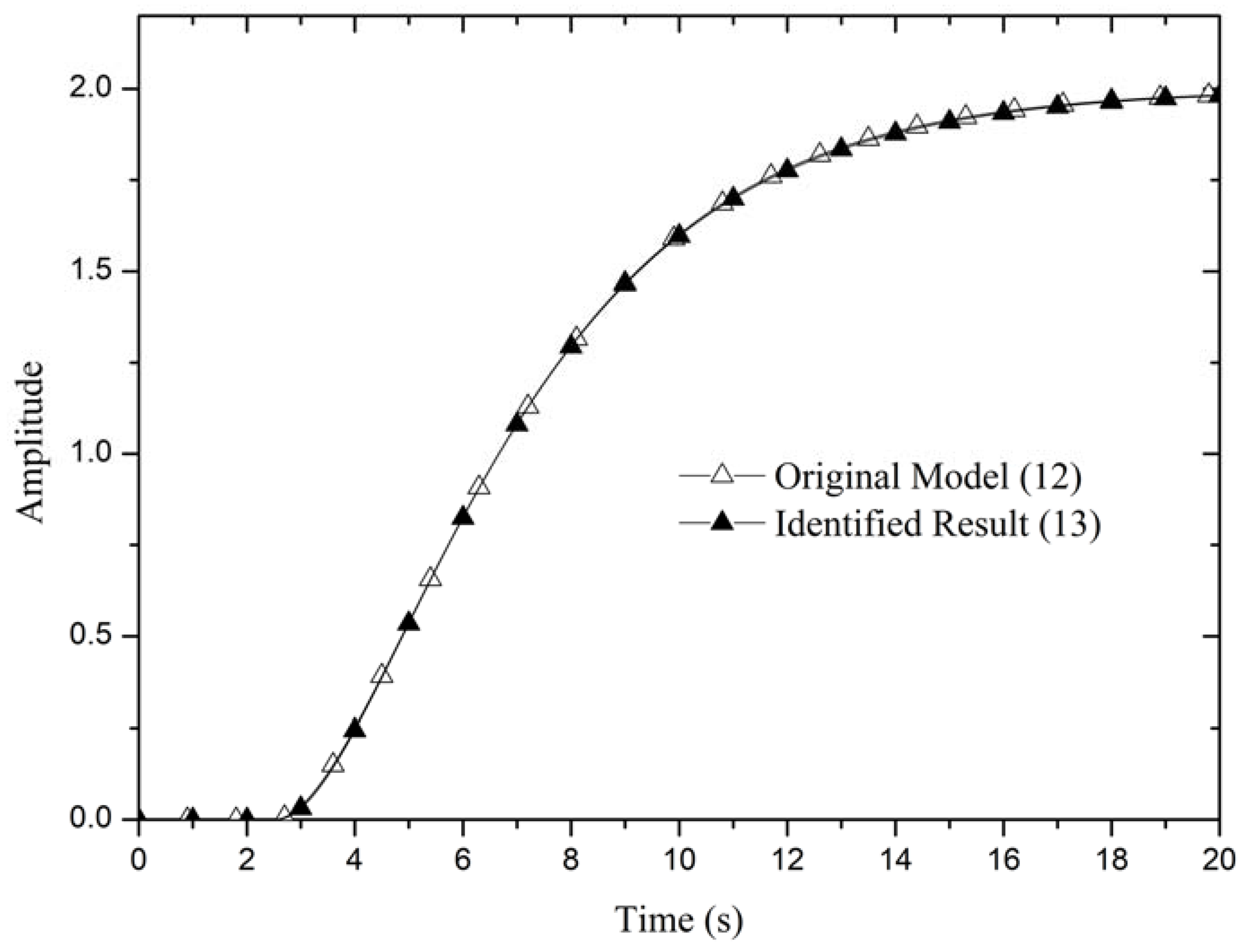
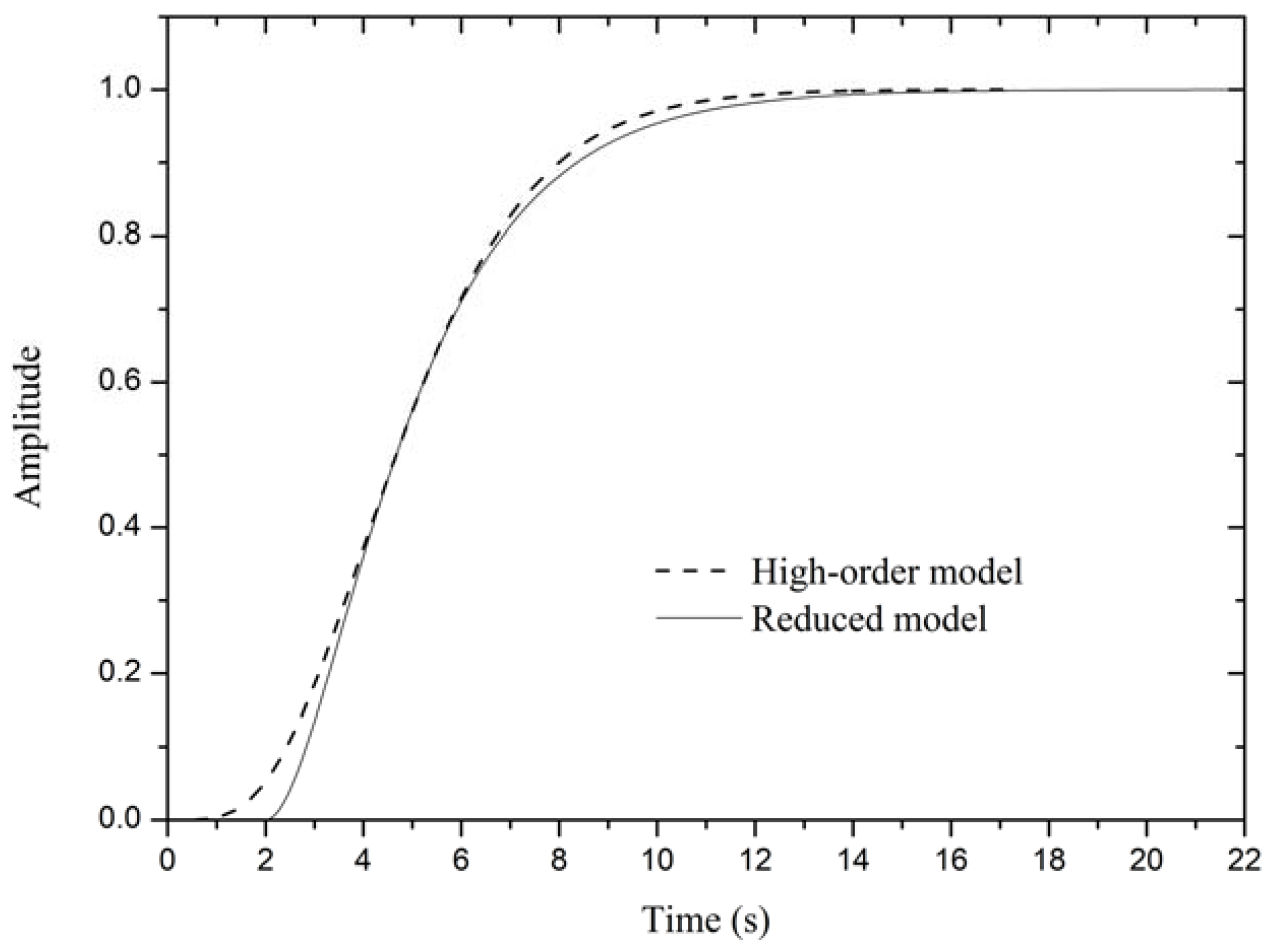
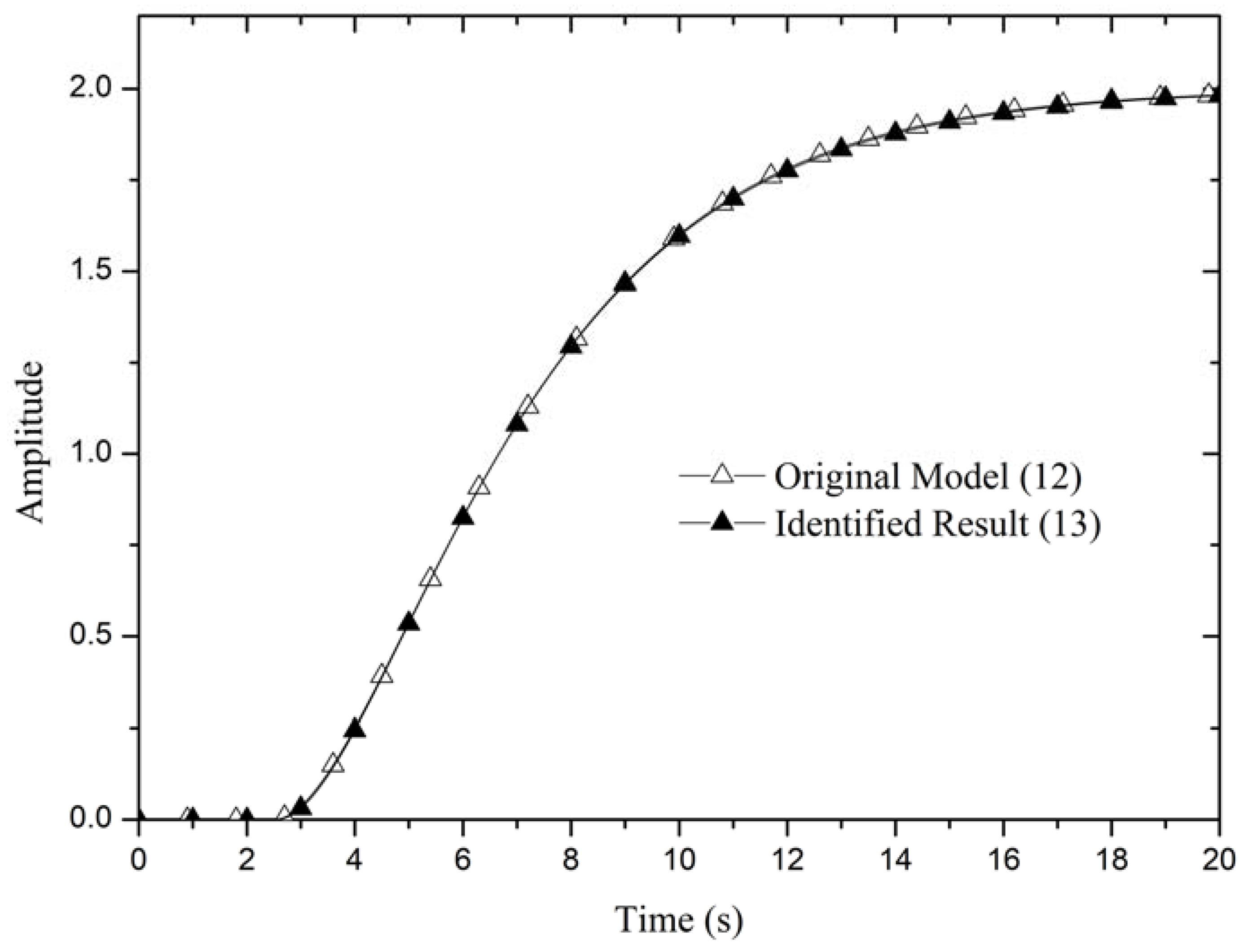
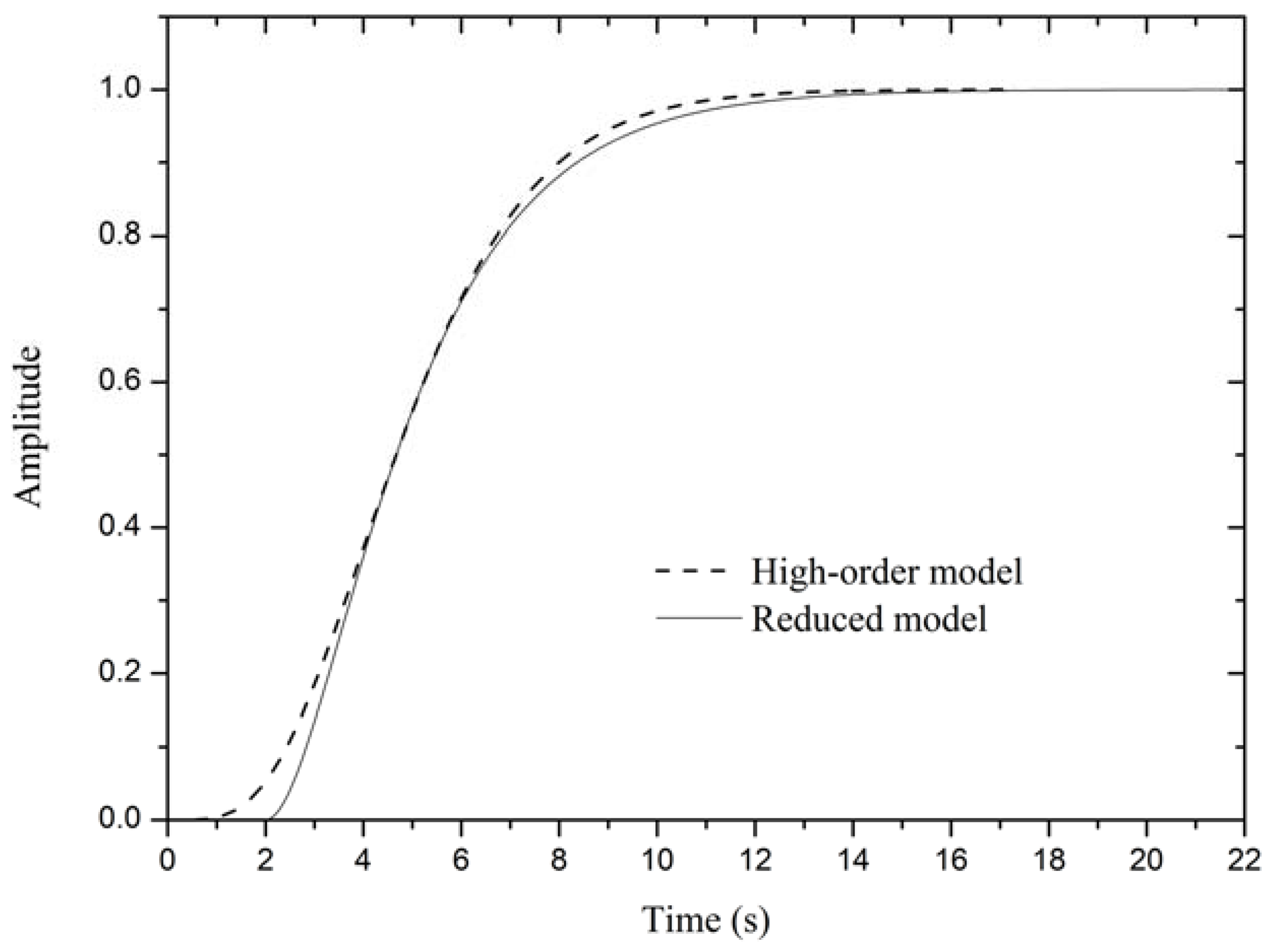
The identified systematic open-loop step response is also shown in
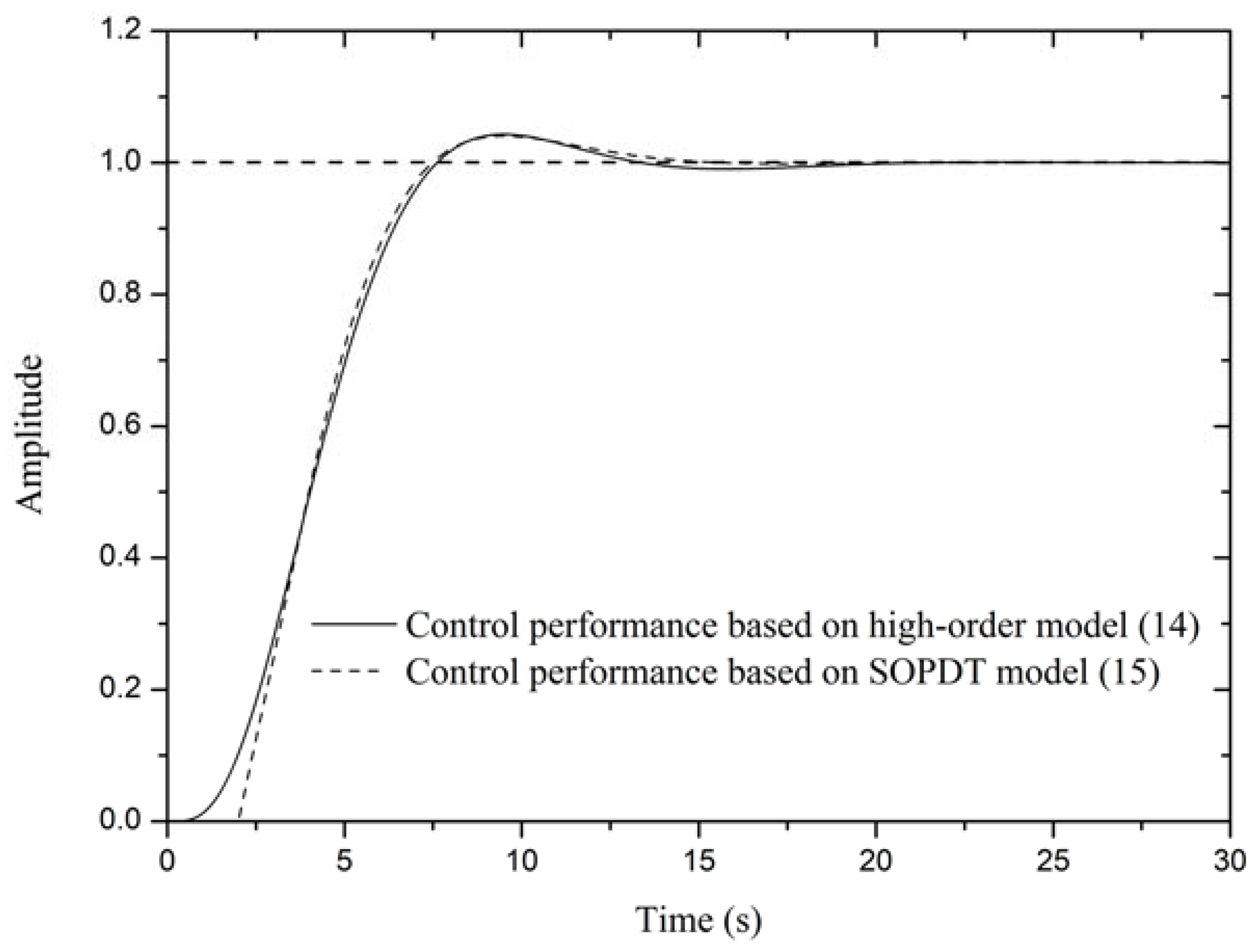
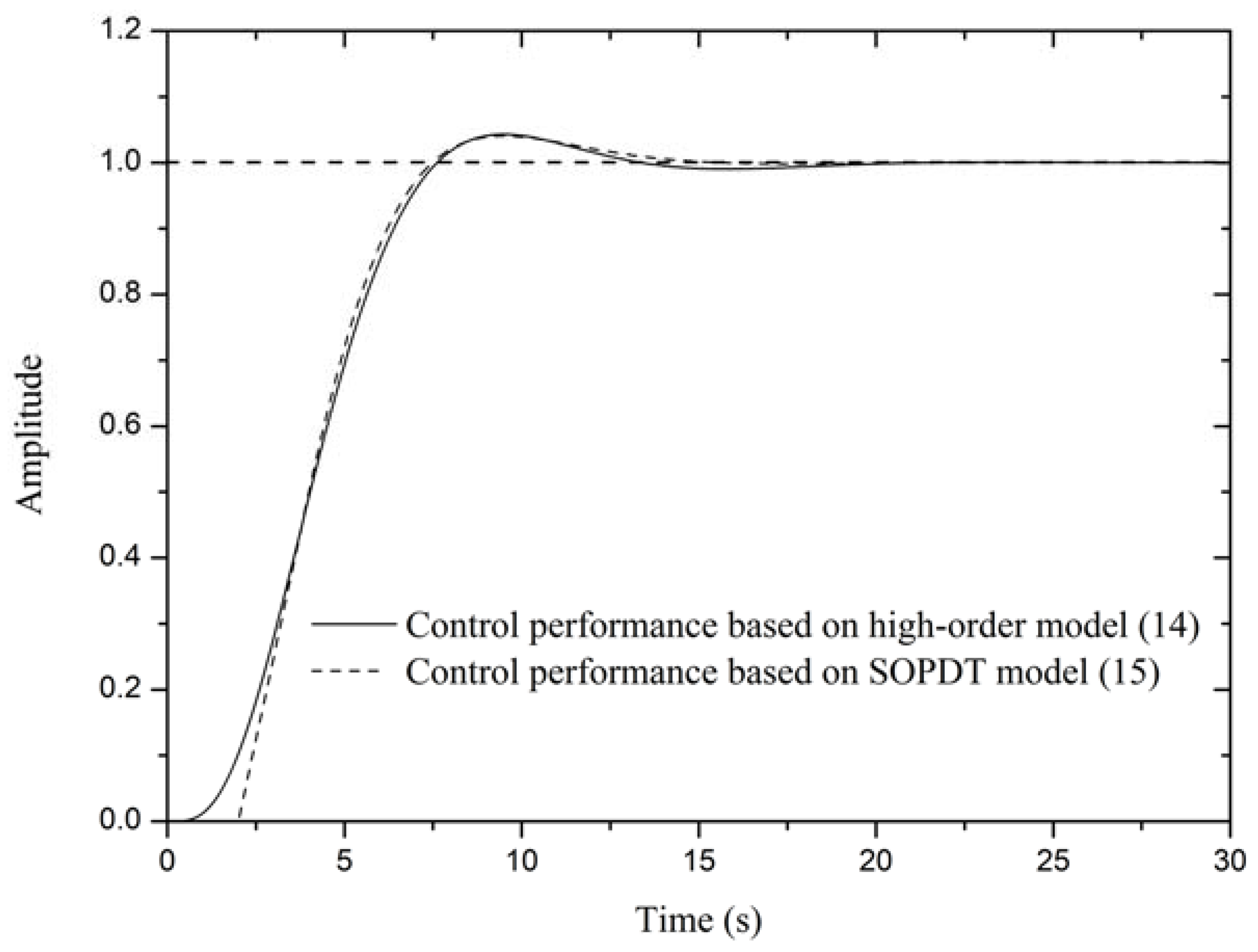
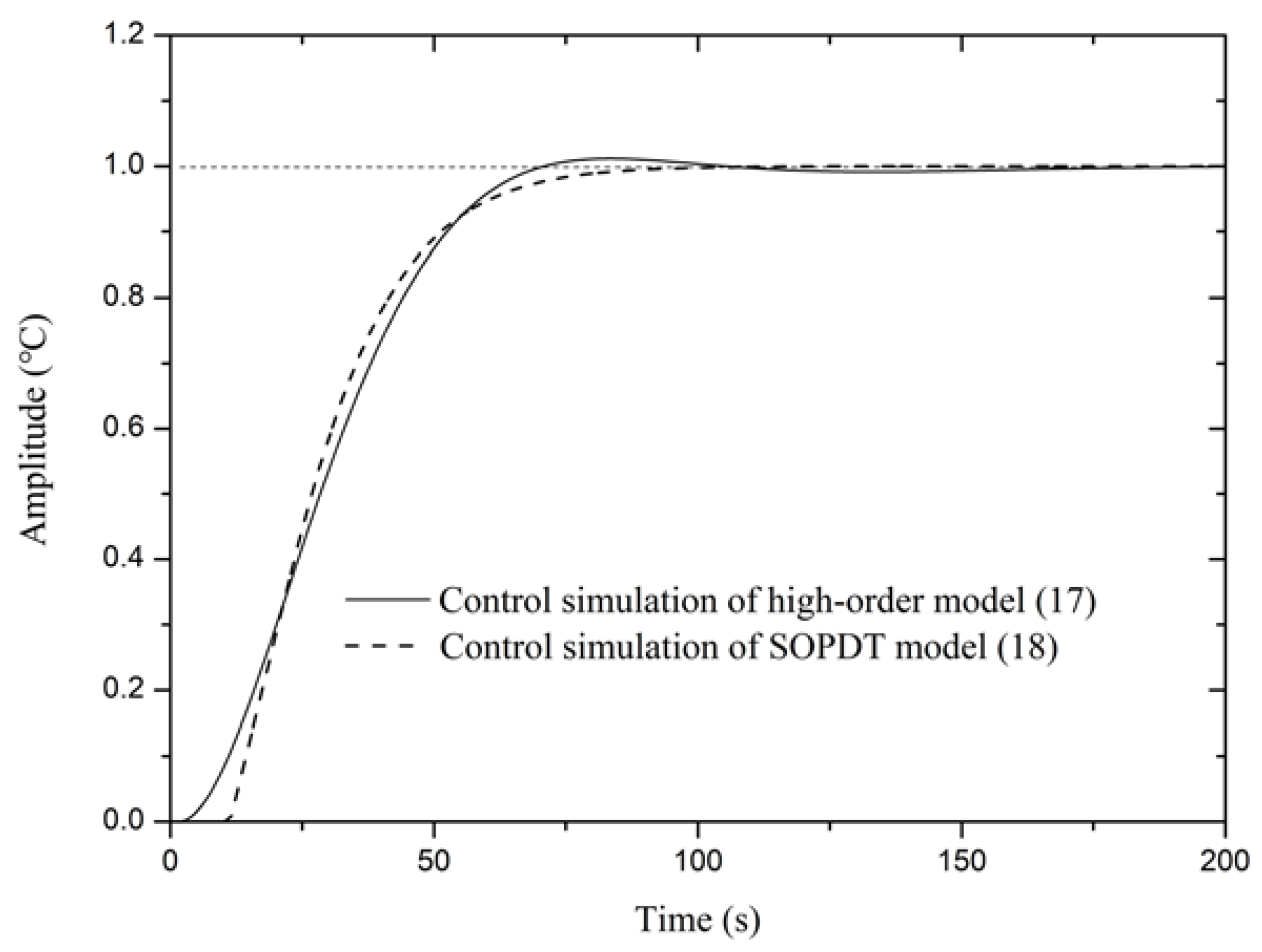
Figure 13 with a dashed line. The resemblance of two curves indicates a successful reduction. To further prove the efficacy of the method, the original model is controlled by a PID controller tuned by SIMC [
18] based on the reduced model expressed as Equation (18). The control performance is depicted in
Figure 14. The original model performs reasonable overshoot and has a short transition period under a step disturbance. The simulation results establish the foundation for the heat exchanger temperature control experiment.
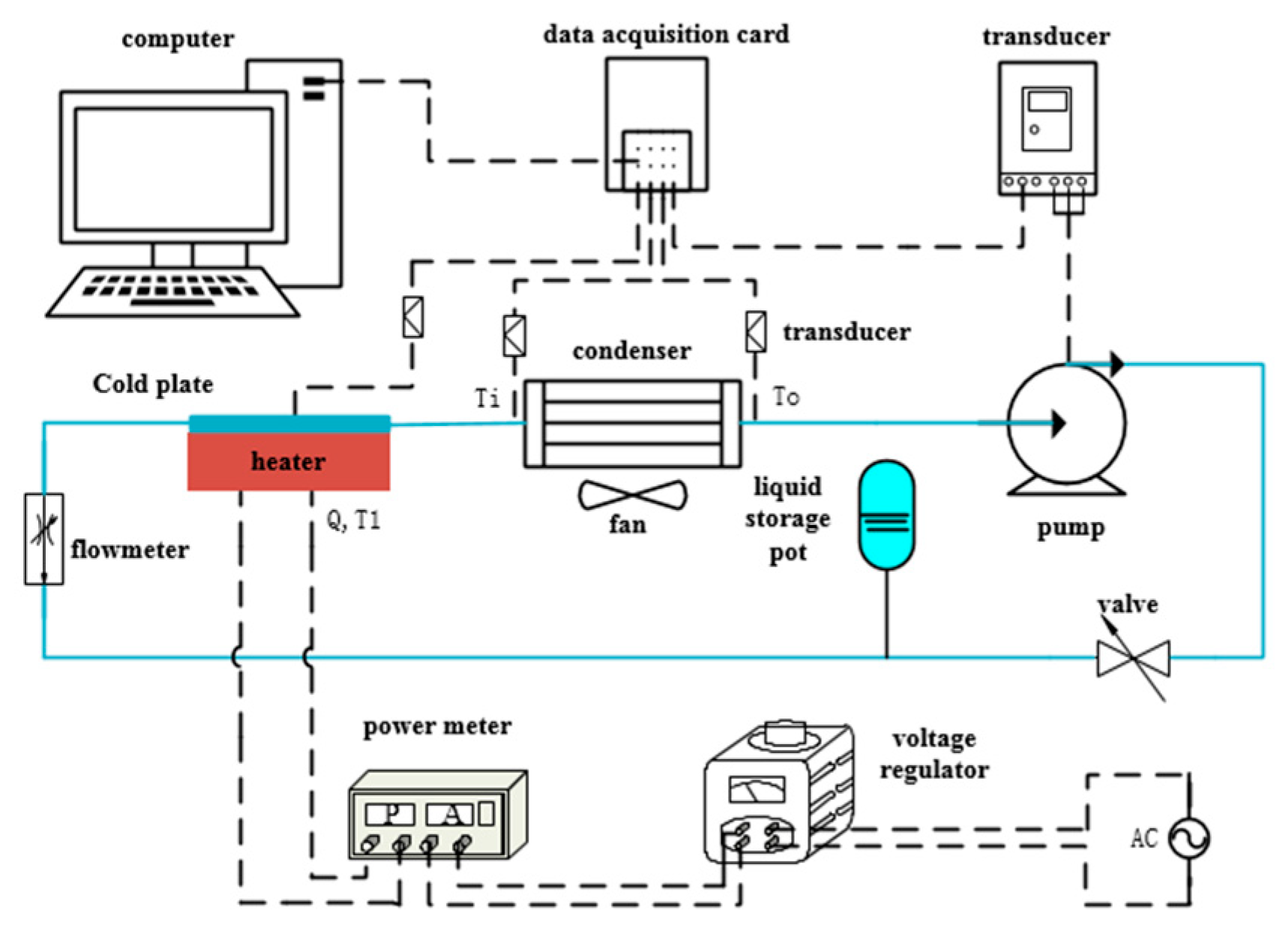
6. Experimental Verification
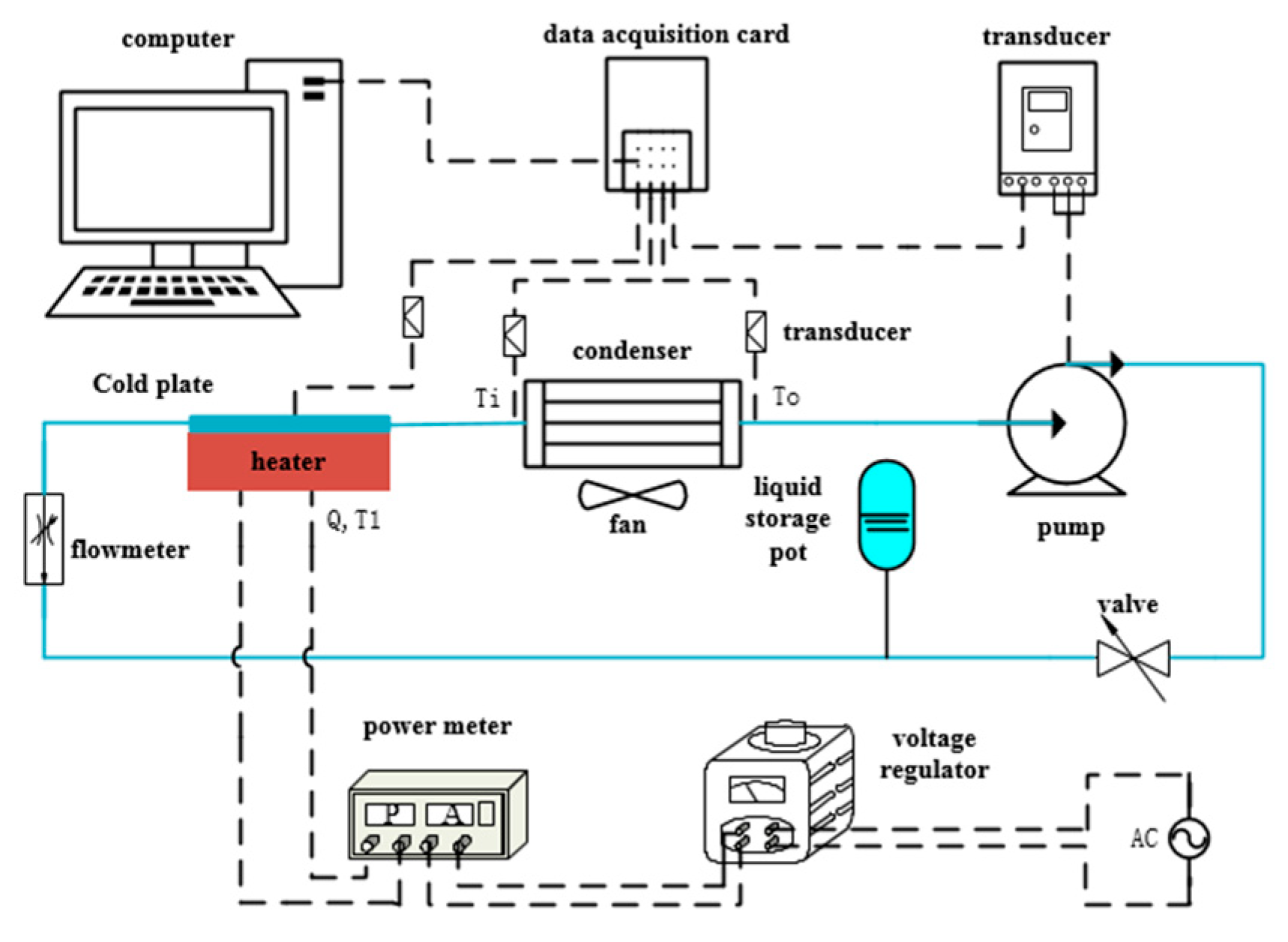
A water-cooling heat exchanger control system is built as shown in
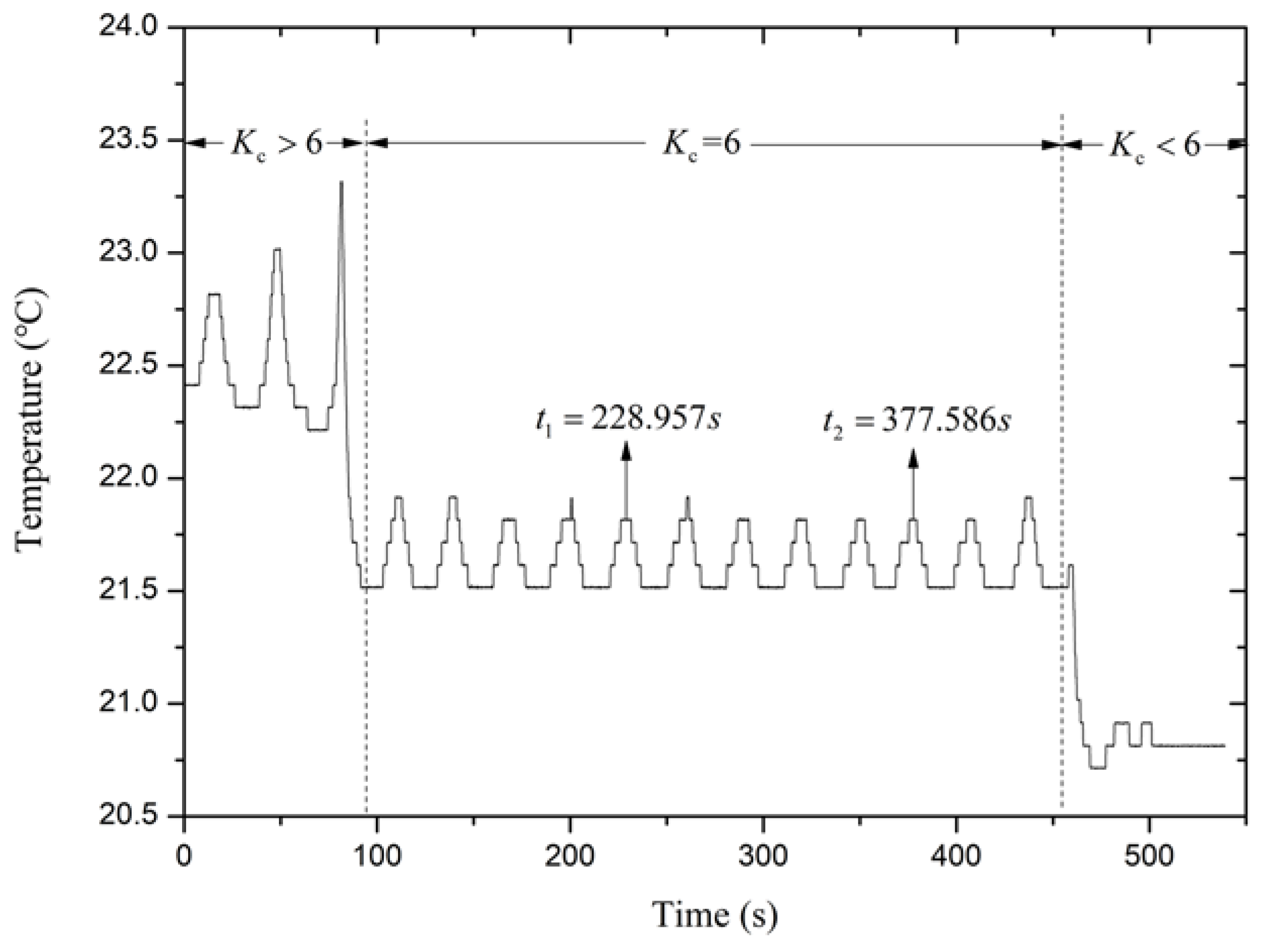
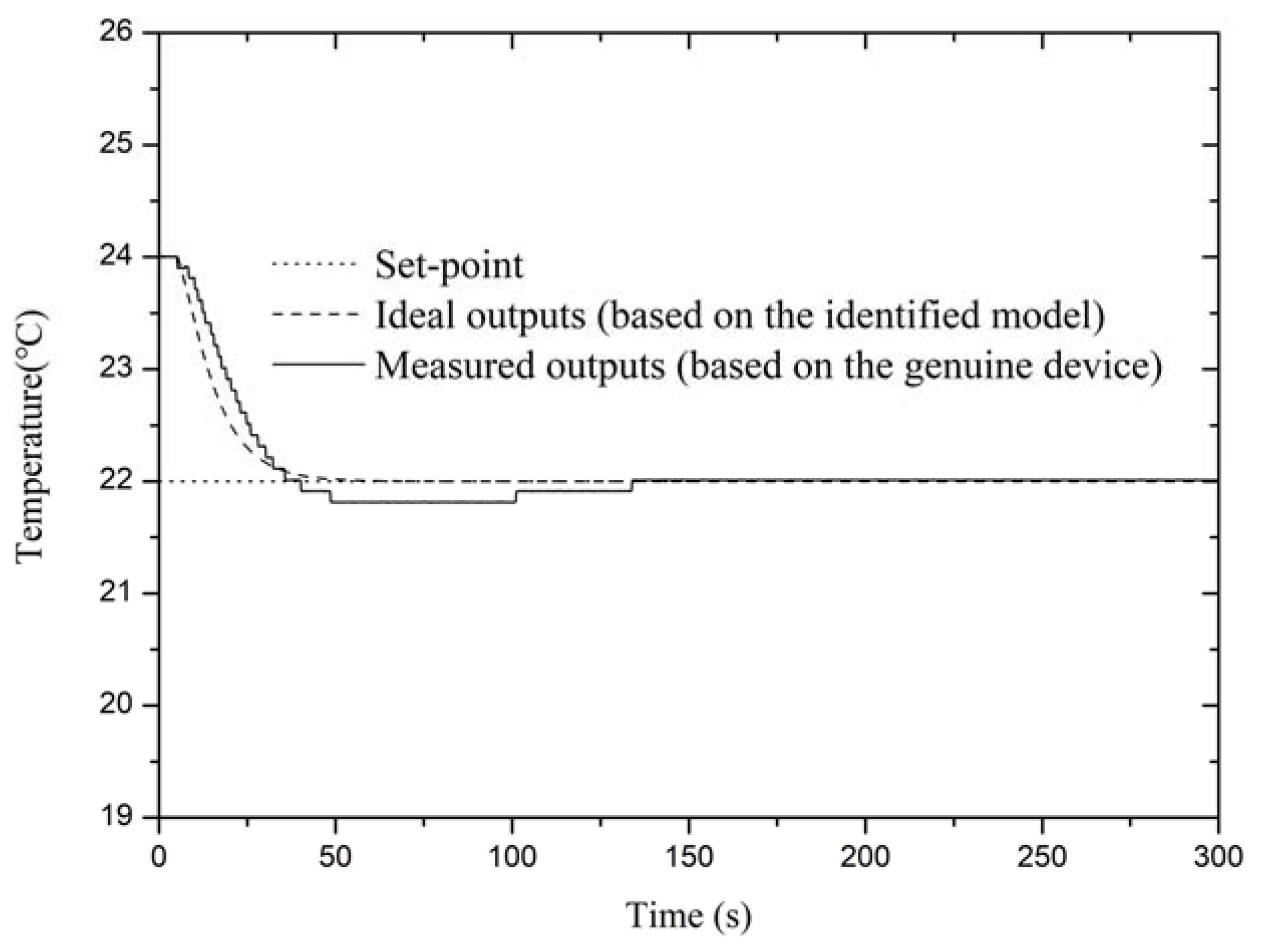
Figure 15. The purpose of the experiment is to obtain an ideal temperature control performance by the PID controller, which is tuned based on the identified SOPDT model. According to the proposed method, an open-loop step response and close-loop critical oscillation curves should be provided.
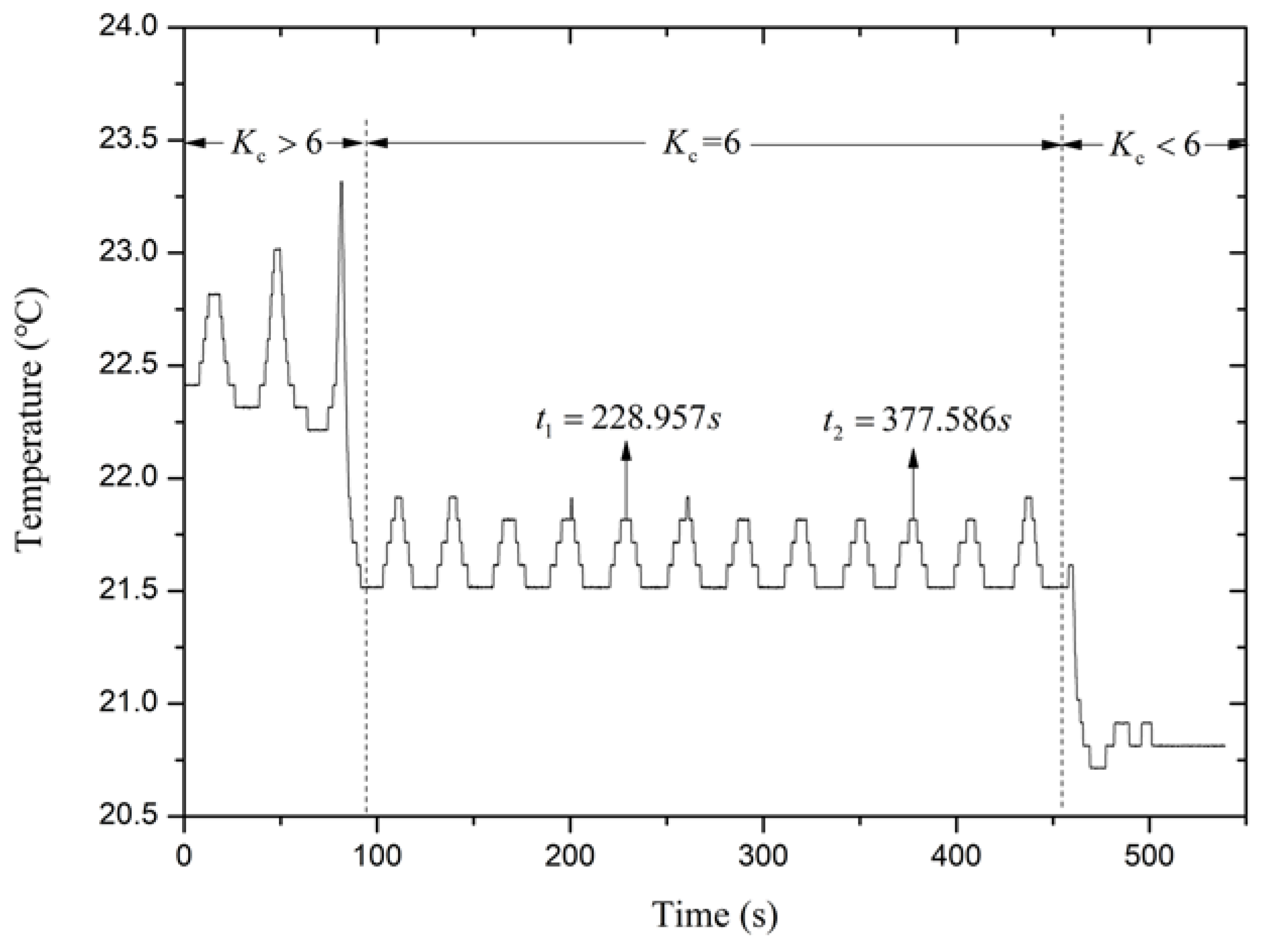
Figure 16 is the critical oscillation curve when proportional gain
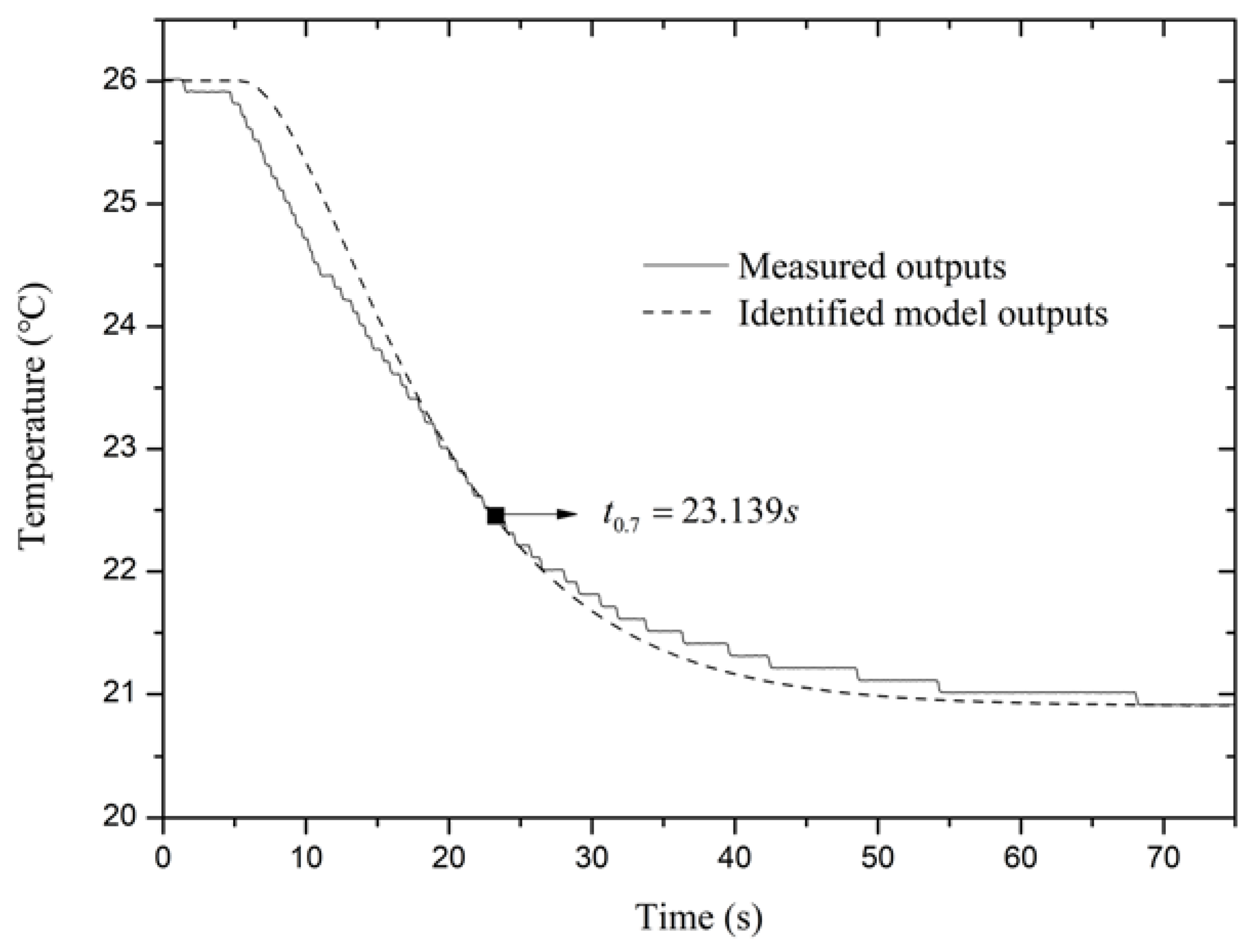
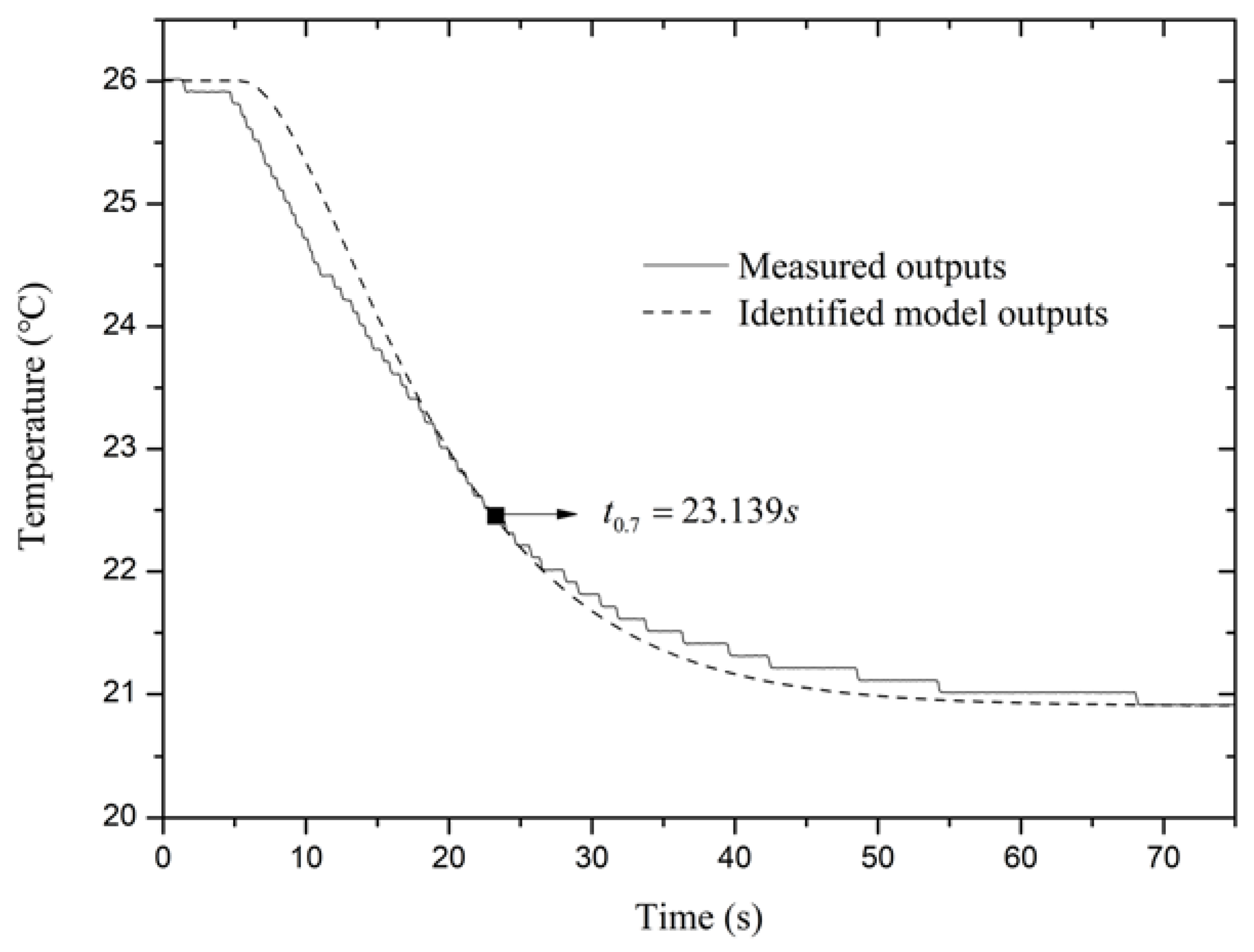
under a fixed heating power and fluctuant pumping frequency. The measured open-loop step response of the heat exchanger is given in
Figure 17 with a solid line. Based on this, the identified model is expressed as:
The open-loop step response of the identified model is also depicted in
Figure 17. Two curves in
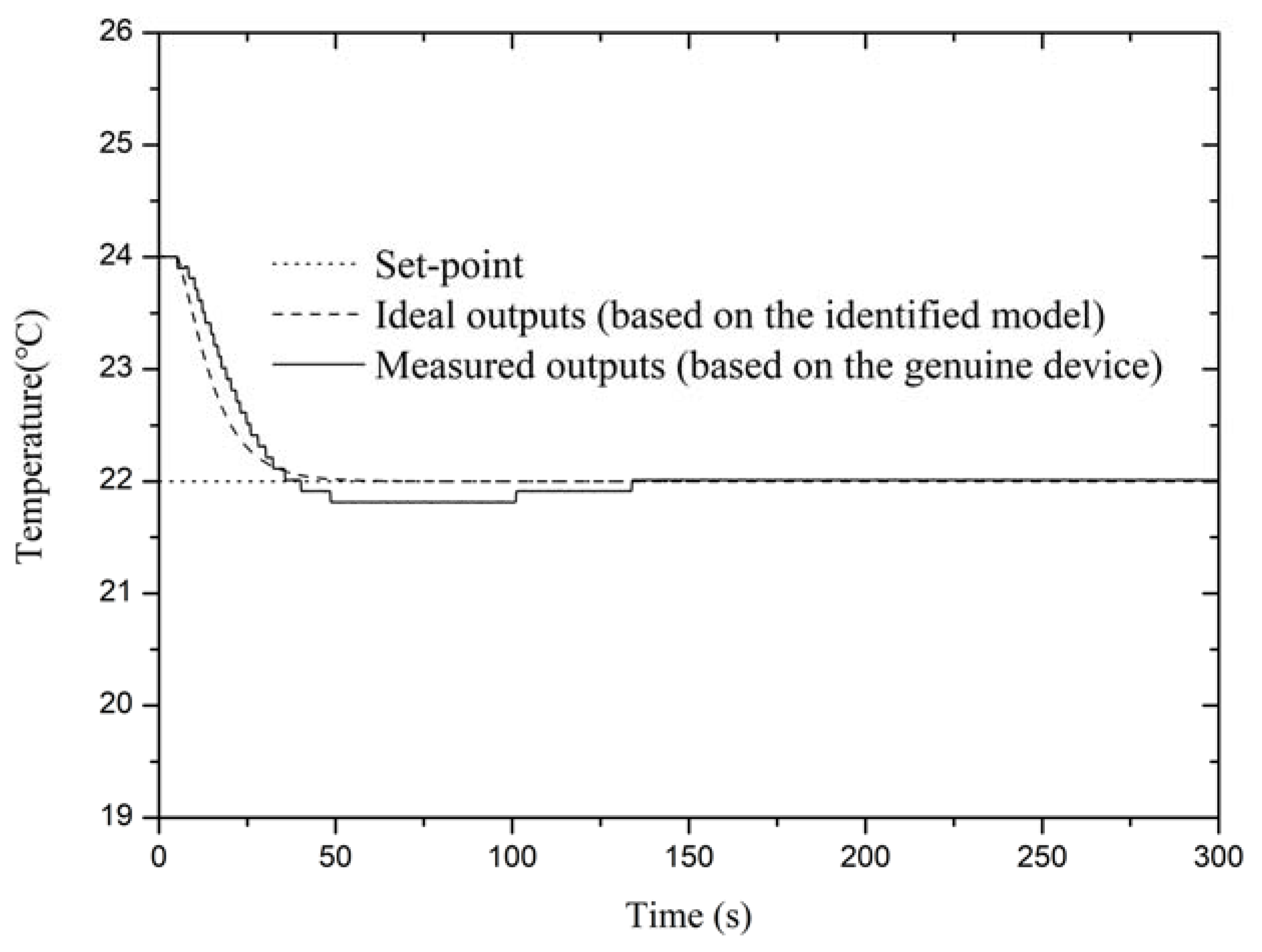
Figure 17 show a high similarity, as we expected. To prove the validity of the reduced model, the PID control performance is shown in
Figure 18, while the PID controller parameters are tuned by the SIMC method [
18] based on the identified model (19).
Figure 18 shows the excellent control quality of the heat exchanger with a short transition period and small overshoot, which confirms the effectiveness of our method. However, the real control process is slightly sluggish compared with the simulation one. The reasons for this include three aspects: an inevitable difference between the original model and reduced model, a stable sampling time of 0.1 s, and a low sensor precision of 0.1 °C.
7. Discussion
Based on the experimental results, the proposed hybrid identification method effectively aids heat exchanger temperature control. The identified model can fully cover the static and dynamic characteristics of the real system. Fully developed PID tuning methods can expediently apply to the reduced models.
The novelty of the method is the combination of time and frequency domain analysis. When excluding the delay time, the proposed method agreed well with the conventional two-point method. Both methods have shown excellent precision. However, the hybrid method is more superior in terms of the delay time and noise disturbance. In addition, the hybrid method is also convenient and feasible for high-order systematic reduction.
The successful implementation on an experimental benchmark heat exchanger confirmed the validity of the method. We also expect a broad application prospect, especially the identification of other similar devices working in sustainable systems. Those model-based PID tuning methods will benefit from the accurate identification and reduction of the hybrid method.
Nevertheless, we absolutely understand its limitation that needs further research. For instance, the first step of the method needs an open-loop step response. However, some systems are never allowed to work without close-loop feedback. The second step requires the system to reach the critical oscillation state, which may be hard to adjust or even cause damage in real production processes. Therefore, our further study will strive to avoid these two problems, but try to work out an ideal identification method that only relies on ordinary close-loop damped oscillation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}