1. Introduction
With the development of social economy and urbanization, pedestrian overcrowding becomes more and more common. Shopping malls, large parks, and transportation hubs are attracting large numbers of citizens in metropolises because of traffic convenience and increasing living standards. During rush hours, urban rail transit stations are frequently crowded and the risk of crushing and trampling accidents is high. When dangerous events occur in these scenarios guaranteeing the safety of pedestrians and ensuring orderly evacuations is critical.
To discover and reduce risks in a timely manner, the characteristics and patterns of pedestrian walking and movement have to be analyzed. The formation and movement of dense crowds in the above-mentioned places have some regularity, and a crowd’s behavior at different facilities is well worth studying. By means of reasonable and effective ways to reveal the mechanism of pedestrian movement, it is helpful for the decision makers to plan and manage the pedestrian traffic in different conditions.
Many researchers have conducted studies on how to capture pedestrian movements effectively and accurately. At present, computer simulations and practical experiments are the main methods employed. The two methods are often combined, recording a participant’s movement in an actual test and using it to calibrate computer simulation model. With the advancement of computer technology, more research is being conducted using this approach to study people’s movement. Pedestrian simulation can be divided into macroscopic model, which considers the crowd as a whole, and microscopic model, which studies the interaction among individuals, and the mesoscopic model.
Dating back to the 1950s, Hankin and Wright [
1] described human crowd movement in terms of the functional relationship of velocity, density, and flow. Henderson [
2] was the first to introduce fluid dynamics into the pedestrian flow and Hughes [
3] subsequently developed the macroscopic dynamic model based on the framework of fluid continuum mechanics considering the flow of the crowd as having the ability to “think”. As the model was still defective, Hoogendoorn and Bovy [
4] considered dynamic path equilibrium of routing choice assuming that pedestrians know their destination and acquired enough information to practice user-optimal equilibrium according to the shortest path. The implementation of such rules also made the model more realistic. Daamen [
5,
6] discovered that the density and flow relationship diagram showed the inapplicability under the condition of congested bottleneck by using first order flow model and experiments. He also calibrated the simulation model for emergency door by observing the children, adults and the elderly’s walking behaviors. Recently, a mesoscopic approach based on the kinetic theory has been applied to model crowd dynamics [
7,
8,
9]. It’s proved to be able to reproduce the complex crowd behaviors such as avoiding obstacles, evacuating in a bounded domain. However, there were problems such as not all pedestrians being familiar with the environment and the walking behaviors of surrounding people.
As the escalation of theoretical and experimental studies, some researchers [
10,
11,
12] discovered that first-order partial differential equations are always in an equilibrium state. In addition, the function of density and velocity cannot reflect the instantaneous changes in a crowd, which means that the first-order model is not capable of explaining some complex phenomena, such as stop-and-go waves and bottleneck clogging [
13]. In order to solve this problem, the second-order macroscopic continuum model was proposed and acceleration was considered as part of the relationship function of velocity and density. Jiang et al. [
14,
15] considered the density of the crowd ahead and walking time, from which they obtained global and local travel costs. Hoogendoorn and Duives [
16,
17] derived from Hughes’s study and integrated a social force microscopic model into the continuum model to simulate some complex self-organization phenomena. They added the interaction of crowds with different destinations, which is only used in the microscopic model, to simulate crowd dispersal, and bidirectional and cross flow for successful sensitivity analysis. Cristiani and Peri [
18] proposed a solution for pedestrians to avoid obstacles of various shapes when walking on the shortest path to a destination by using the macroscopic partial differential equation (PDE) simulation model and a Particle Swarm Optimization algorithm to find the minimum evacuation time. The latest research [
19] is combing eikonal equation and social force model to simulate multi-group pedestrian flow with optimal path computation. The result shows that attraction between groups have influence on evacuation time.
The dynamics of pedestrian flows have also been investigated using various methods. Entities such as ants and sheep have been used to capture the characteristics of their movement, which are similar to those of pedestrians [
20,
21]. Numerous studies have been reported in the literature; however, this paper only collates similar studies related to pedestrian movement. Date back to 2003, D Helbing [
22] focused on evacuation by means of experiments and Lattice gas model simulations. It turned out that the escape time was determined by the capacity of exit and evacuation’s dynamic. Yamamoto and Hieida [
23] performed the simulation of traffic flow with bottleneck and had captured the stop-and-go waves. Gorrini and Bandini [
24] built a bottleneck model with a changing width and found out the walking speed of individuals, which was 1.22 m/s, were higher than group pedestrians. For instance, in the SFPE handbook [
25] and “Planning for foot traffic flow in buildings” [
26], exit capacities are given. For constrictions with a width of 1 m, the capacities are 1.3 ped/(m.s) and 1.6 ped/(m.s). For children, the capacity rises to 3.31 ped/(m.s) because of their smaller size. If competition exists, the maximum capacity of a door with a width of 70–80 cm can reach 3.7 ped/(m.s) [
27]. However, in studies that measure the rate at which pedestrians walk through a door or narrow path, scant consideration is given to the capacity of congested traffic. Kretz et al. conducted pedestrian experiments, finding the difference between narrow (one person at a time) and wide bottlenecks (two persons at a time) in the distribution of time gaps [
28]. Considering the effect of a psychological phenomenon, Kretz et al. also identified the relationship between pedestrian flow and bottleneck width [
29]. Recently, ENM Cirillo and M Colangeli’s research [
30] about the bottleneck was very thorough via a Zero Range Process on a periodic lattice. They found the condensed state and jammed state with the saturated rate and density. What we have reviewed are likely walking behaviors, rather than pedestrian clusters or identification of dangerous situations.
In terms of the risks, people crushing and trampling were originally addressed in sociological field [
31,
32]. Currently, conventional research is based on quantitative analysis, using a critical value of a certain parameter to define the probability of danger occurrence. For example, when the crowd density in a certain area exceeds a critical value, then the area is deemed to be a dangerous area where a congestion accident may occur [
33]. Other researchers have analyzed pedestrian contact force to determine the likelihood of a person choking in a crowded situation. Henein and White [
34] viewed the contact force as a kind of sensory input information of high-density crowd that has a certain influence on individual movement. Smith and Lim [
35] tested various human contact force based on gender to examine level of “comfort”. The safe limit ranged from 175 N to 247 N. As to the crowding risk analysis, Helbing and Al-Abideen [
36] represented the crowd internal force by the product of density and velocity variance, and used this index to identify the critical time and position of accidents. Song et al. [
37] denoted the force of a pedestrian by the variance of local density and velocity. Yin et al. [
38] derived a crowding force formula by analyzing human energy.
It is clear that the normal methods for detection of pedestrian movement are more concentrated on simulation. Furthermore, the macroscopic model is widely used as it requires fewer parameters than other models and can simulate high-density scenarios. Only a few studies investigated the crowding risk from a force perspective.
In this paper, we studied the macroscopic pedestrian flow model in two dimensions and selected the second-order accuracy finite difference method, which is a two-step Lax–Wendroff scheme, to obtain numerical solutions. Subsequently, simulations of scenarios with obstacle and bottleneck were carried out to verify the validity of the macroscopic model. From the results of density distributions, we determined that the macroscopic model can be used to give a rough estimate of the dangerous area by distinguishing map colors. In order to determine the current risk in crowds, we designed an actual contact force test which was under the premise of the tester’s safety. At last, the relationship between density and crowding force was established.
3. Results
To verify the practicability and effectiveness of the macroscopic model, we first validated its usability and then applied it to our study scenarios. We chose common metro station scenarios for which we can observe the density distribution under different situations at different times and judge the danger region to prepare for the next crowding force test.
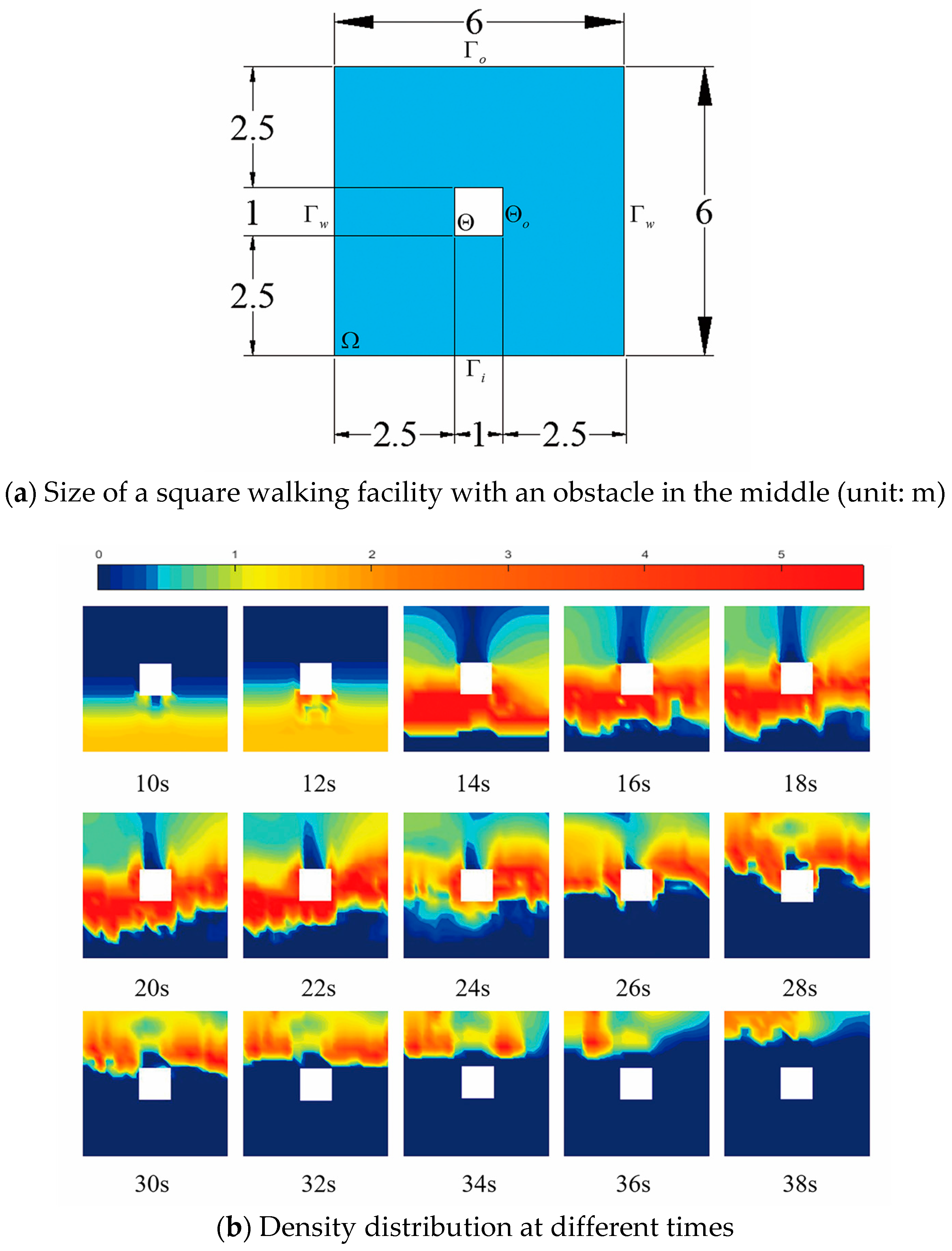
3.1. Scenario to Validate the Usability of the Macroscopic Model: Channel with an Obstacle
The channel used is a square area with a side length of 6 m and a one-meter square obstacle in the middle. The obstacle is not transparent, so the pedestrians facing the obstacle cannot see the area behind it. Existence of obstacle has an effort on the route choice and influences the pedestrian traffic. A free and equilibrium flow which are non-disturbance and unchanged, with an initial density = 1.5 ped/m2 entered the channel from the bottom toward the top. The pedestrians stopped entering at 8 s.
More specifically, the wall of obstacle
was solid and non-permeable. The internal speed was set to zero for no one can cross the wall
. According to Equations (6) and (7), the initial and boundary conditions of the scenario are given by
is the boundary condition of the exit . As for the , it changes with the and is calculated by Equation (8). According to the definition of potential , the exit’s potential is the smallest (set to zero in this paper), and it is satisfied in the whole walking process. So, the equation is interpreted as the instantaneous minimum potential to the destination for .
Figure 2 shows the density distributions at different times for the evolution of the scenario.
Figure 2b illustrates the density distribution at different times for the dissipation of pedestrian flow in fifteen phases. The time interval of each shot is 2 s, started at 10 s. In the results of this pedestrian flow simulation, the initial density and speed are 1.5 ped/m
2 and 0.82 m/s, respectively, governed by the speed–density function of Equation (5). As for the boundary conditions, we assign the potential
and the speed (u,v) as a constant value at the boundary. Also, the speed inside the obstacle
is set (see Equation (14)). The inflow stops enter at 8 s, and the pedestrians spend 40 s finishing the travel. We can infer from
Figure 2 that in the first phase, pedestrians walk toward the destination in a uniform speed, that the density is equally distributed. A triangular region that is hardly occupied by flow is formed in the front of obstruction. After four seconds, this triangular is filled with pedestrians coming from the bottom. At the same time, the density exceeds 2.5 ped/m
2 in the position of the lower-left and lower-right corners. This is caused by pedestrians’ routing choice that they walk around the obstacle. In the third to fifth phase, there is a temporary cluster around the obstruction because the existence of the obstacle has an influence on route choice. The density augments gradually and affects the subsequent flow speed, resulting in congestion. This phenomenon reveals that more serious congestions happen due to more and more pedestrians assembled together. After the sixth phase (
t = 20 s), because pedestrians always choose the shortest route, which means they go straight continuously after passing the obstacle. A triangular region is formed behind the obstacle where normal walking pedestrians cannot arrive, until the twelfth phase that all pedestrians pass this region. Meanwhile, a part of density remains high for the congestion is not dissipated. At the end, the rest of pedestrians leave the facility in order. As can be seen in those results, the pedestrian movement pattern is mainly as same as the empirical rules we observe. In addition, we can apply those equations and numerical analysis methods to the experiment scenario below.
3.2. Experiment Scenario: Effects of Bottleneck
Another scenario is that the flow comes from the bottom and moves to the top through a narrow path, which is a bottleneck. The size of this channel is shown in
Figure 3a. Existence of the bottleneck has an impact on the traffic to a large extent. On the boundary, the velocity and potential on the walls is set below. The simulation results are shown in
Figure 3b.
In
Figure 3, at the front of the bottleneck, some of the pedestrians cease walking due the sharp capacity change, and they line up at the entrance of the narrow channel. Unlike Zuriguel and Janda’s research [
42], we get the arch formation without placing an obstruction in front of the bottleneck. An arch-like shape appears. Then, the pedestrians at the arch center burst into the narrow path, which causes a gradual collapse of the arch. The pedestrians on either side away from the bottleneck center scramble for the walking path with the group near the bottleneck. Thus, there is a delay; then, both groups walk smoothly out of the channel. The maximum density occurs at the moment when arching happens. The density remains high until the flow disappears.
The trend and direction of pedestrian movement can be found via a flow vector plot. At the beginning of the simulation, the pedestrians flow into the narrow channel and becomes congested at bottleneck. The flow in the middle part is larger, which leads to the arch form increasingly dissipating. When the pedestrians encounter the bottleneck, there is an arch jam lasting for 4–5 s.
3.3. Experiment of Pedestrian Contact Crowding Force
In order to verify the extent of the bottleneck situation, we obtained the density distribution and designed an experiment to measure the contact crowding force of the pedestrians in the arched area under the same congested condition. Because of the high density and pressure, testers were all under perfect protection to prevention of dangerous occurrence. Besides, the maximum crowding force we got from the experiment was 90 N at the most congested position, and there is an exponential relationship between crowding force and density. The experiment’s process is shown below.
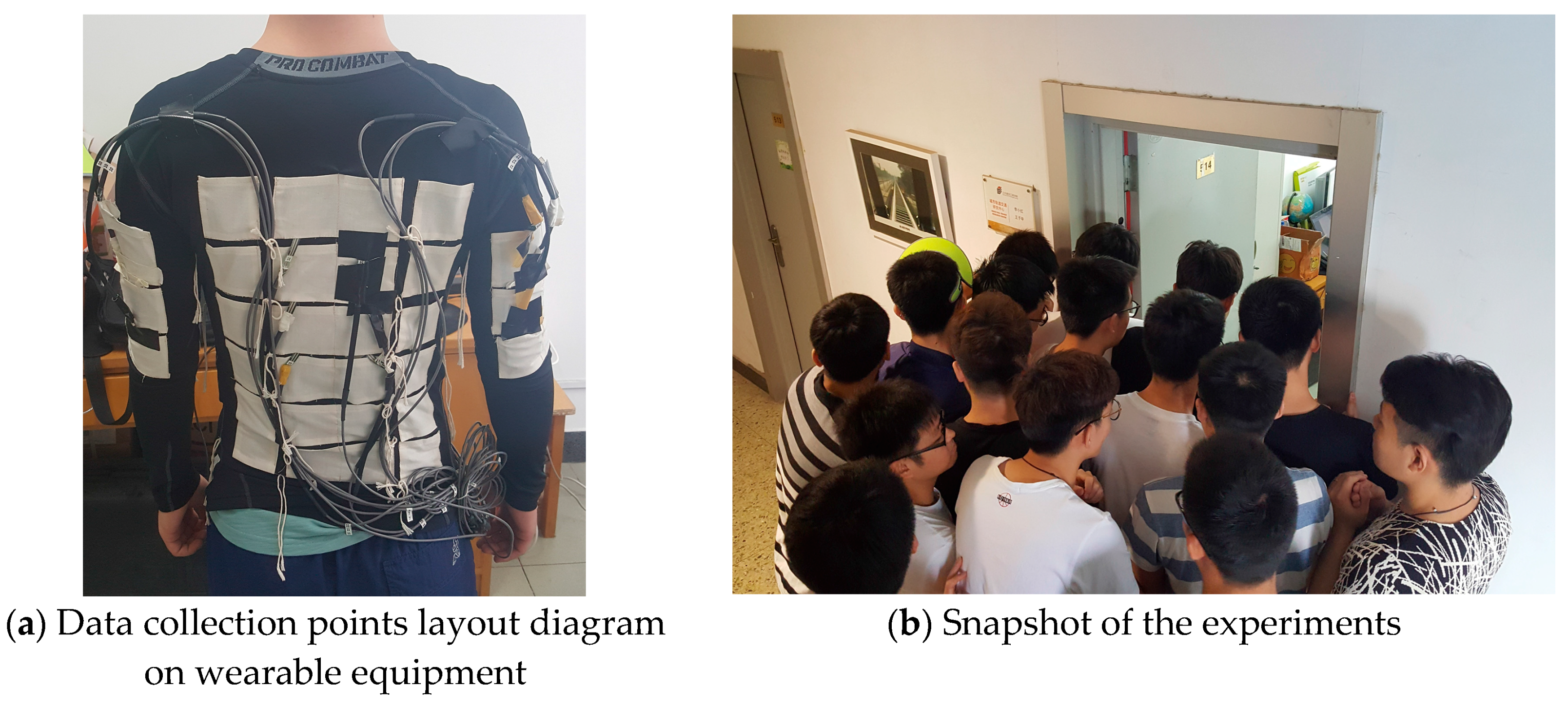
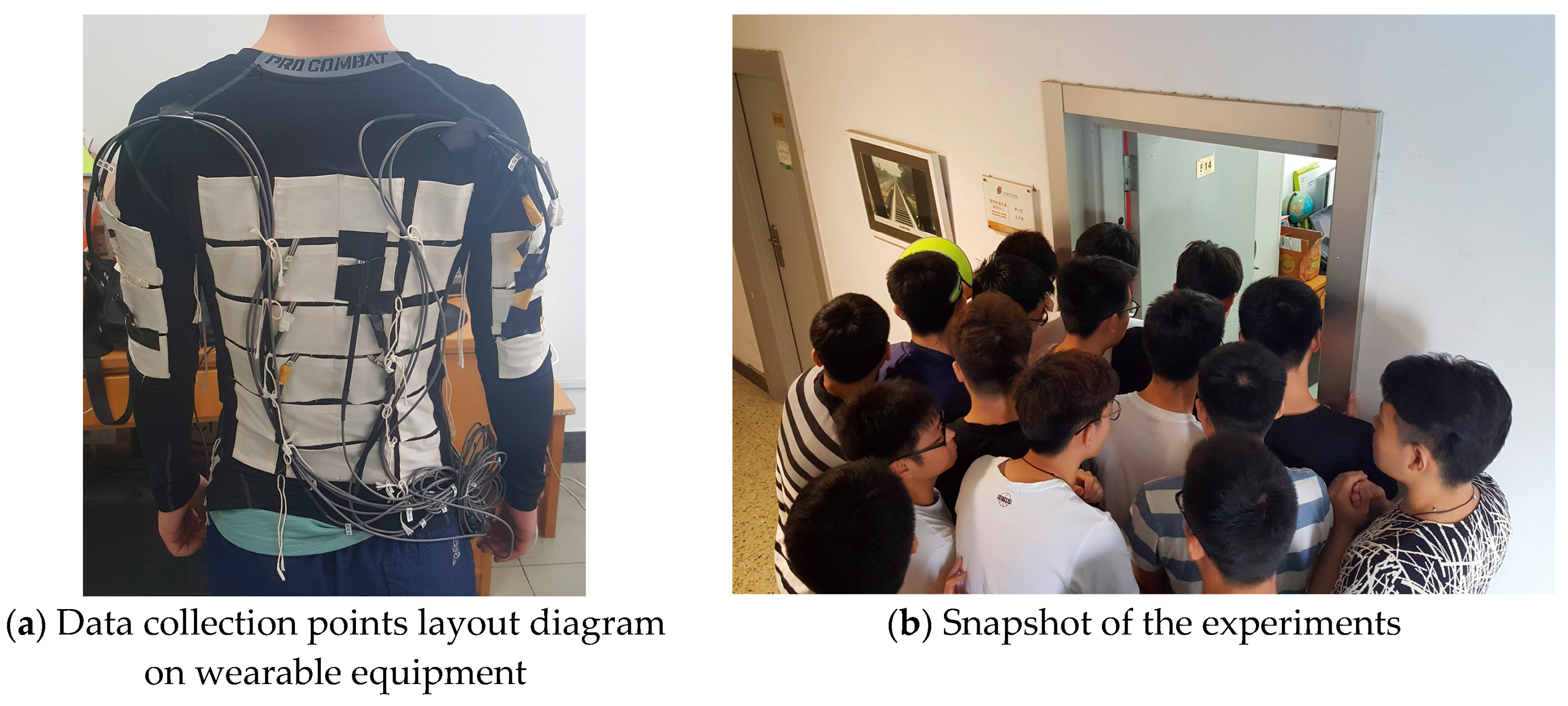
The crowding force in this paper refers to the physical force caused by body contacts. It is an interaction force among two or more pedestrians. When there is an emergency in big and crowded place, pedestrians would scramble with each other to get away from the dangerous area as soon as possible. In this situation, the extrusion may be occurred among a cluster of pedestrians. Therefore, when people touch and press others in a crowded scenario, the crowding force emerges. Pressure sensors are attached onto clothing. There are twelve pressure sensors, produced by Sensor Products Inc. USA, including six pieces on the back and three on each arm to measure the forces. A piece of sensor is a square with a side length of 0.044 m. The sensitivity and frequency are 0.001 KPa and 50 Hz, respectively. And we extract the maximum value at different time points with the same interval when the press among pedestrians happens. The equipment are shown in
Figure 4a.
The crowding force test required a participant wearing the cloth with sensors and stand in the middle of a crowd. While entering the bottleneck, the pressure on the participant in different positions was measured. In this manner, the force distribution in the arched area could be described further and most dangerous individual can be identified.
First, we needed to ensure that the experimental scenario was the same as in the simulation. The test area was set at a 1 m-wide door with a 2 m-long channel inside. All the participants waited outside. At the beginning of the test, the testers wear the equipment and were arranged in the congested area in accordance with the same conditions of congestion and squeezing into the door. The crowd started with an initial density of 5.6 ped/m
2, like the simulation results. The pedestrians were set in a crowded condition; in order to guarantee the safety of participants, they could shout for help when they were about to fall, get trampled, or had difficulty breathing—in which case the experiment would stop immediately. The test procedure can be seen in
Figure 4b.
After 45 repeated tests, a large amount of data was obtained. The difference in the time required for whole test between simulation and experiment was within acceptable limits. The simulation result and experimental result were 11.85 s and 12 s, respectively. The error was 1.3%. By extracting the maximum crowding force at each position, which refer to the most dangerous situation could happen at bottleneck,
Figure 5a shows the distribution of the crowding force in the arched area. In the arched area, the maximum force is on the right corner of the narrow channel, which can reach 90.7 N. This occurs at 2.4 s for a duration of 0.1 s. The position of the force is the tester’s right arm. The crowding force in this area decreases as the distance from the bottleneck decreases. The crowding force is closely related to the position where the pedestrians stand as the smaller the number of pedestrians on the side, the smaller the magnitude of force exerted on the body as well. Further, the closer the distance from the bottleneck, the more intense the competition among pedestrians is. With more congestion, the mutual extrusion becomes more obvious, so that we get greater crowding forces. In particular, the person closest to the bottleneck not only bears the pushing pressure from the people behind, but also need to handle the effect of the changing width.
The magnitude of the crowding force is different before and after 6.8 s by analyzing the maximum crowding forces. The maximum crowding force is 90.2 N, obtained at 2.4 s. The congestion is slowly disappearing and the maximum crowding force decrease to 5.9 N after the 6.8 s, which is only 6.5% of that before 6.8 s.
Figure 5b shows the variation of crowding force with time. We can analyze the increasing of maximum crowding force as it is accompanied with the congestion appearing. It also shows that the crowding phenomenon tends to show up in the early 6.8 s. Over time, the number of people inside the arched area is decreases. Consequently, the interactions among them decrease until the forces reach zero.
On the other hand, the crowding forces evolutions in different positions are also different.
Figure 6 shows the maximum crowding force at each position’s distributions in three phases. At the third second, the person who is closest to the bottleneck is bearing a force of 40 N. At that point, the crowd has reached congestion. At the sixth second, the crowded area begins to collapse slowly. Pedestrians enter the narrow channel more or less and the interactional force is obviously reduced. The crowding force of the group that does not walk into the channel remains at 15 N, which implies that the interaction still exists among pedestrians. At the ninth second, the arched area completely disappeared, and the crowding force decreased to below 5 N. Most of individuals no longer bore pressure, because increasingly more people passed the bottleneck. As we have mentioned above, the empirical maximum contact force a normal adult can bear is 247 N [
35]. Generally speaking, what we have got is within the safe range.
In order to discover the behavior of pedestrians’ movement more intensively and how the density and force impact the cluster risk, we extracted the density of the bottleneck simulation and the crowding force of the experiment above in the same scenario to investigate the relationship of this two parameters. We also calculated the crowd densities at different times by analyzing the pedestrian movement recorded by video, comparing with the results we get from macroscopic model to assure the consistency of simulation and experiment. In combination with the pressure test results, the corresponding function between force and density was established. The data were drawn at a 0.5 s interval; the fitting curve is shown in
Figure 7. The exponential fitting is used to satisfy the goodness of fit’s condition. R
2 is found to be 0.98. When the density is less than 5 ped/m
2, there is no contact and pushing among the pedestrians in the test area, which leads to the force being zero. With the increase of the density, crowding force increases. The two parameters have a positive correlation before the crowding force and density reach 31 N and 8 ped/m
2. After the force exceeds 31 N, the density increases slowly and within the limits of the maximum density, which is 8.2 ped/m
2. The main reason for this phenomenon is that the human body does not have substantial elastic deformation, which ensures that the density of the crowd cannot increase indefinitely. When the density reaches a critical value, the space among pedestrians is close to zero, and the congestion becomes increasingly more serious. The crowding force increases no longer leads to an increase in density, but at this point crushing or choking may happen due to the overcrowding. When the slope of this fitting meet 0.01, the fitting is in close proximity to horizontal, which we take as critical point. In this experiment, the critical density value is 8 ped/m
2 and the critical crowding force is 31 N.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}