

Sensitivity Analysis of Electric Energy Consumption in Battery Electric Vehicles with Different Electric Motors
 , , , and
, , , and
Abstract
:1. Introduction
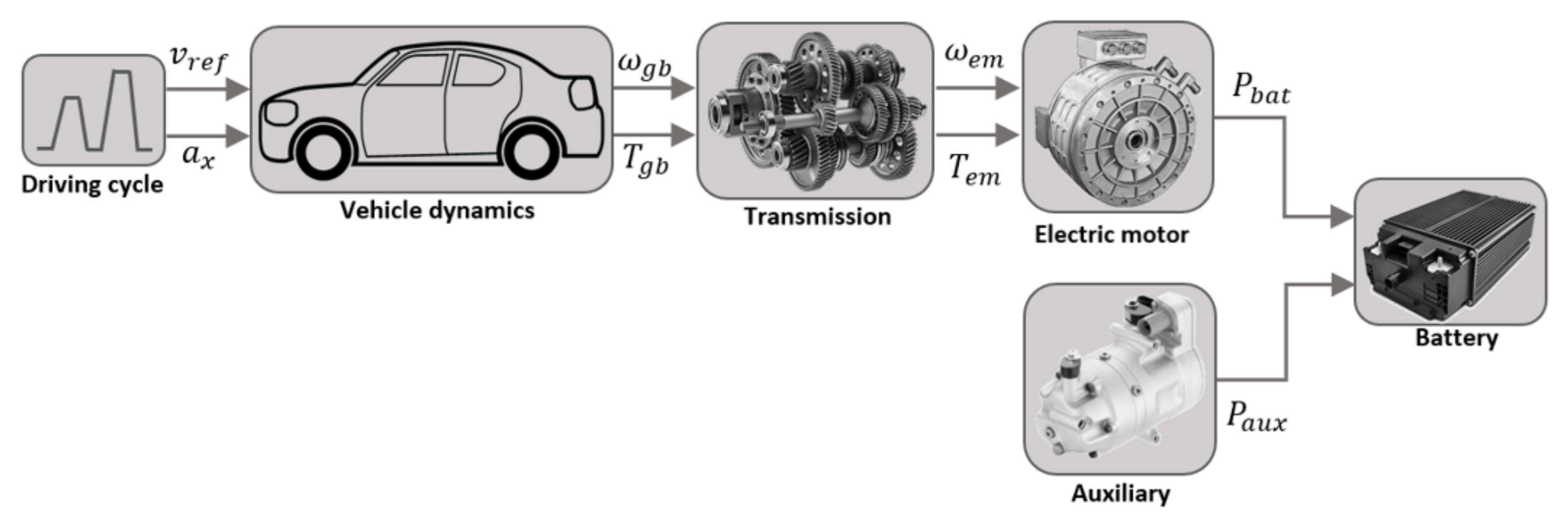
2. Electric Vehicle Modelling
2.1. Longitudinal Vehicle Dynamics Model
2.2. Speed Reducer
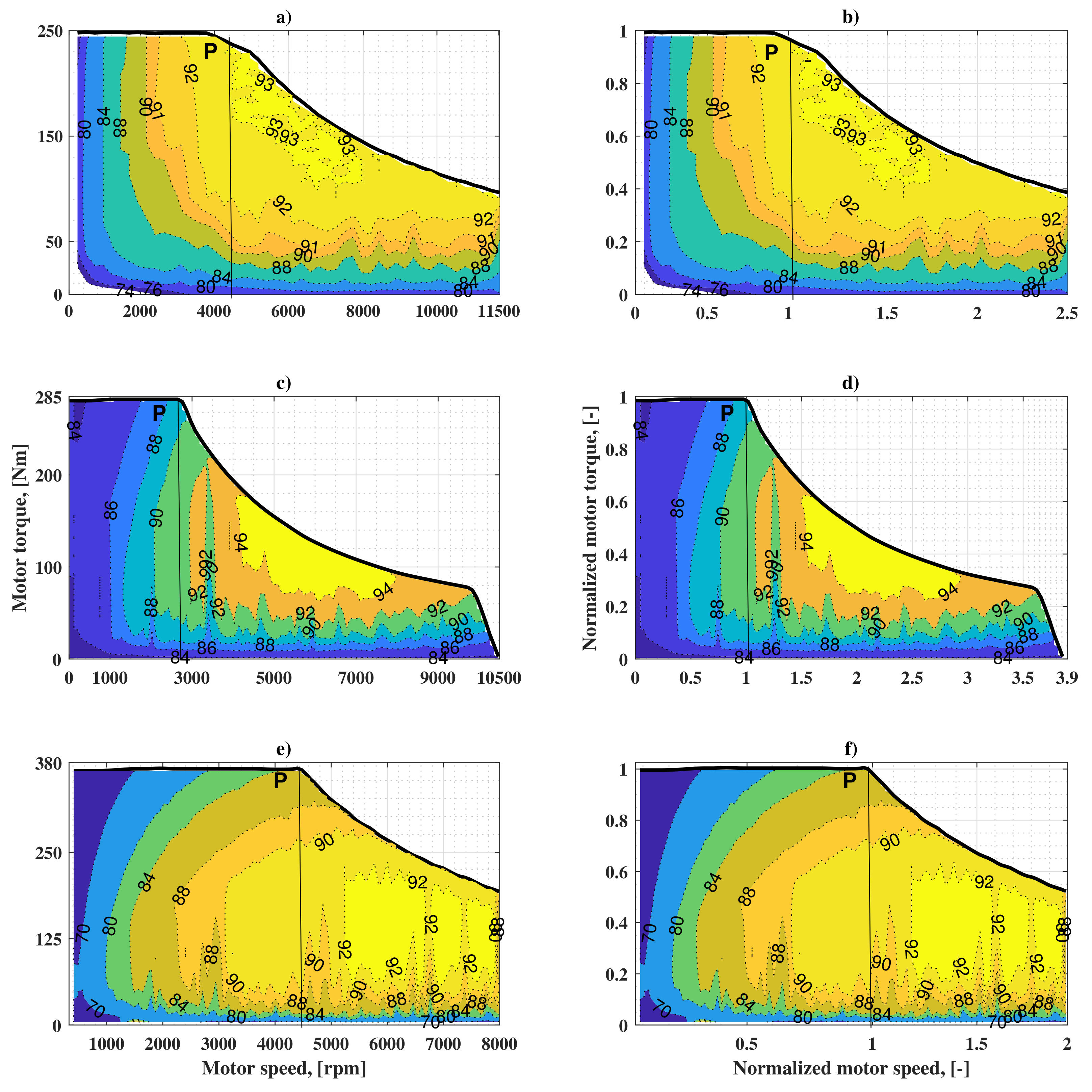
2.3. Electric Machine
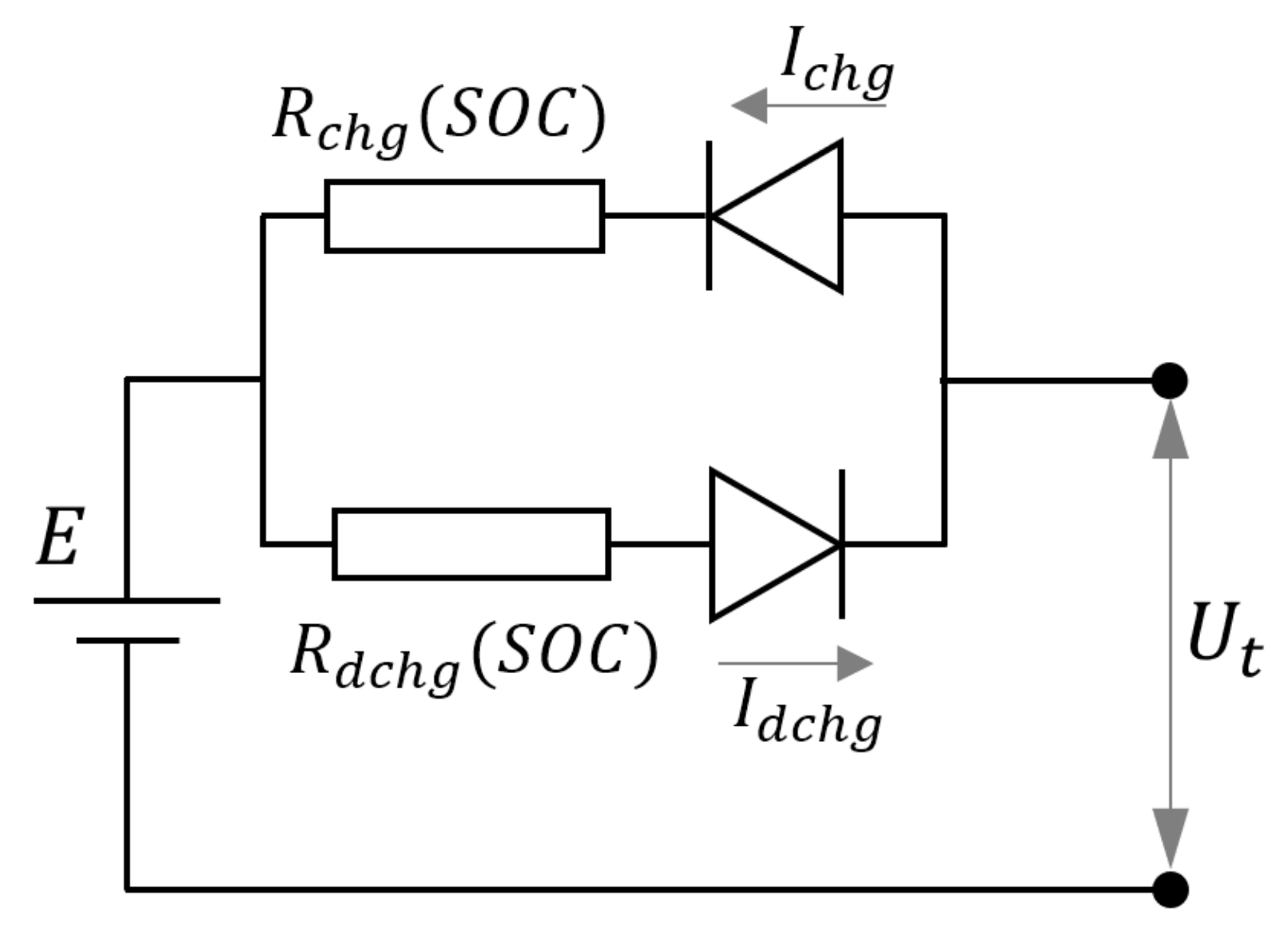
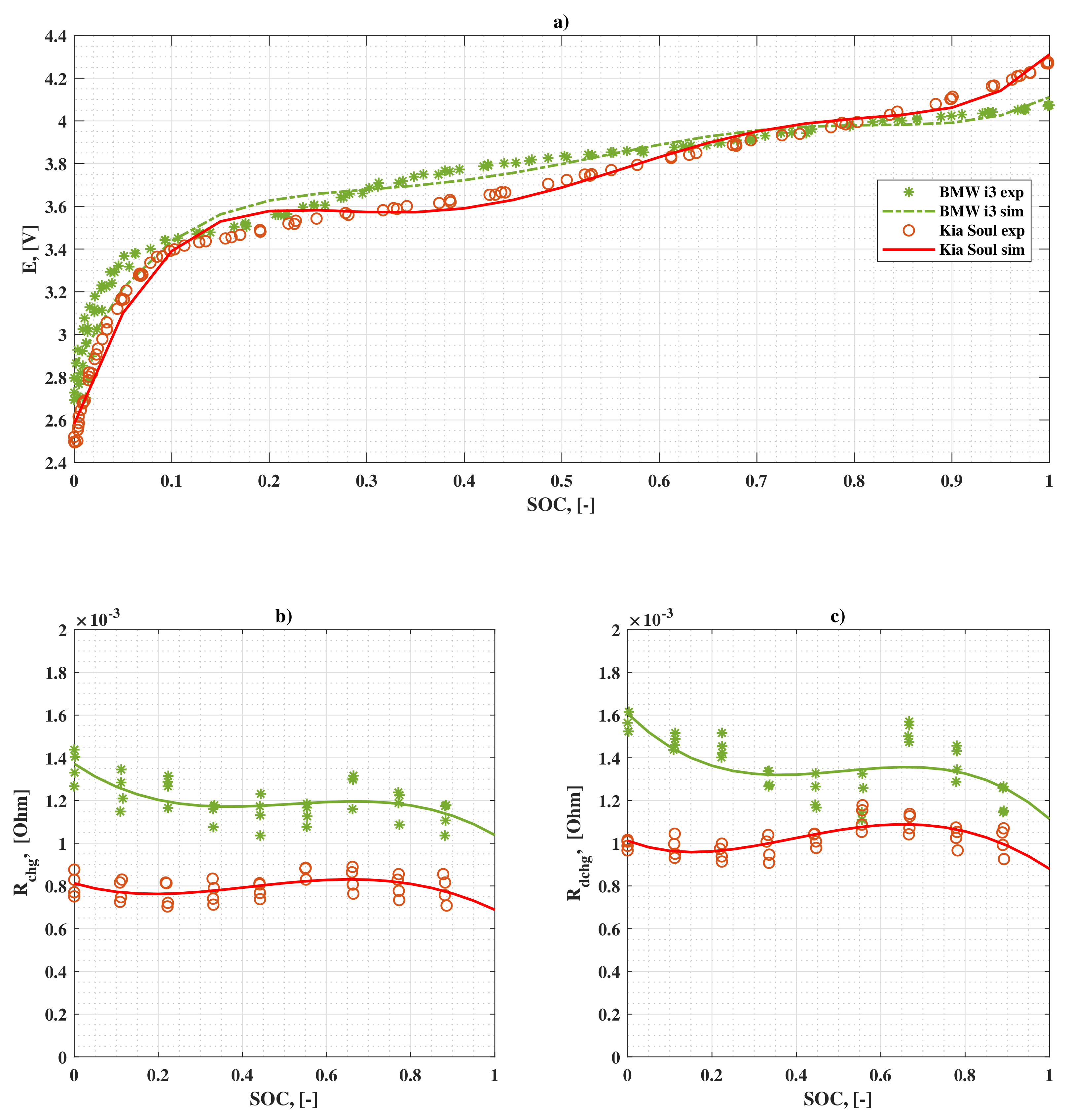
2.4. Electric Battery
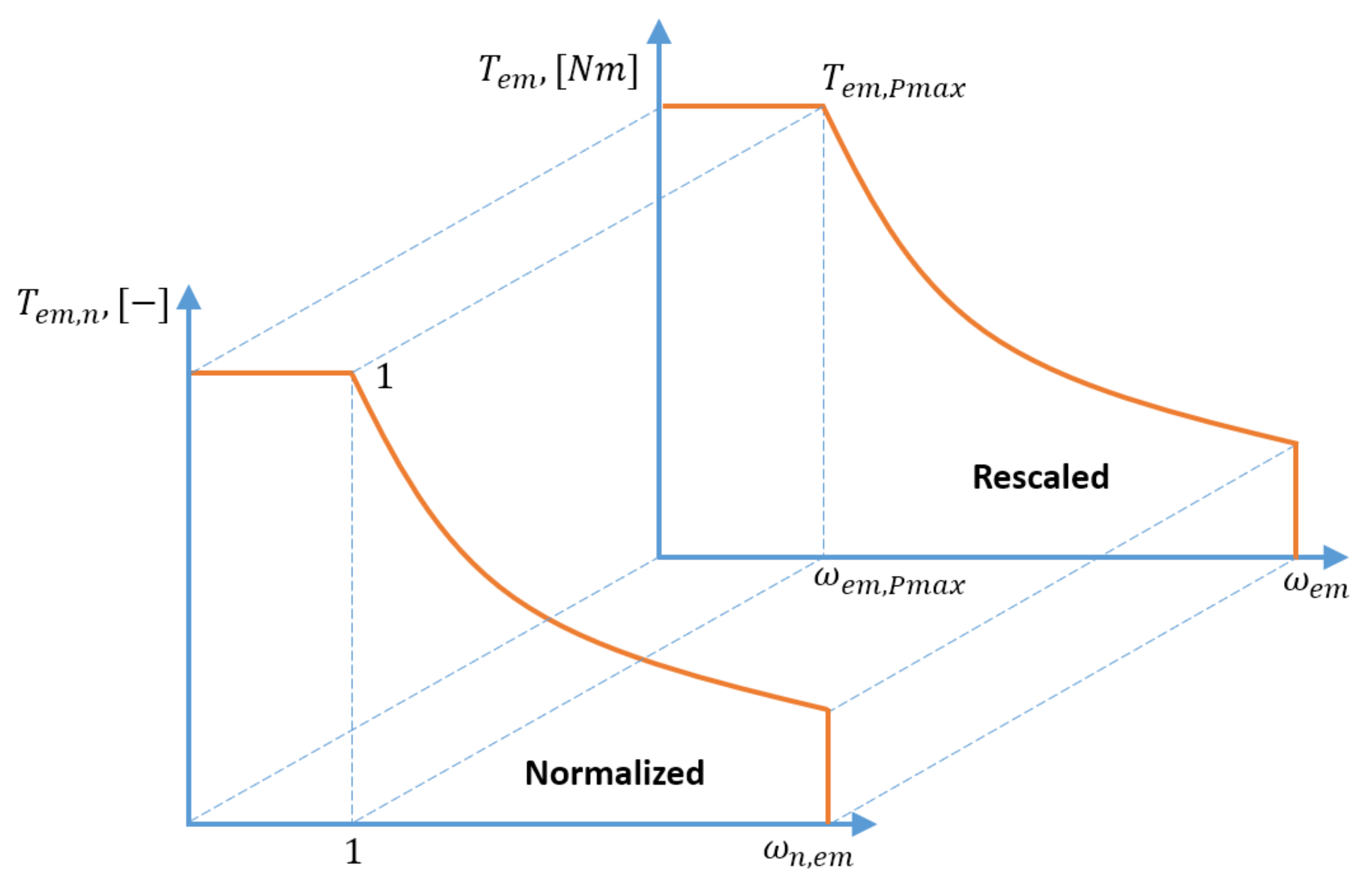
2.5. Electric Motor Re-Scaling Method
3. Sensitivity Analysis for Electric Energy Consumption
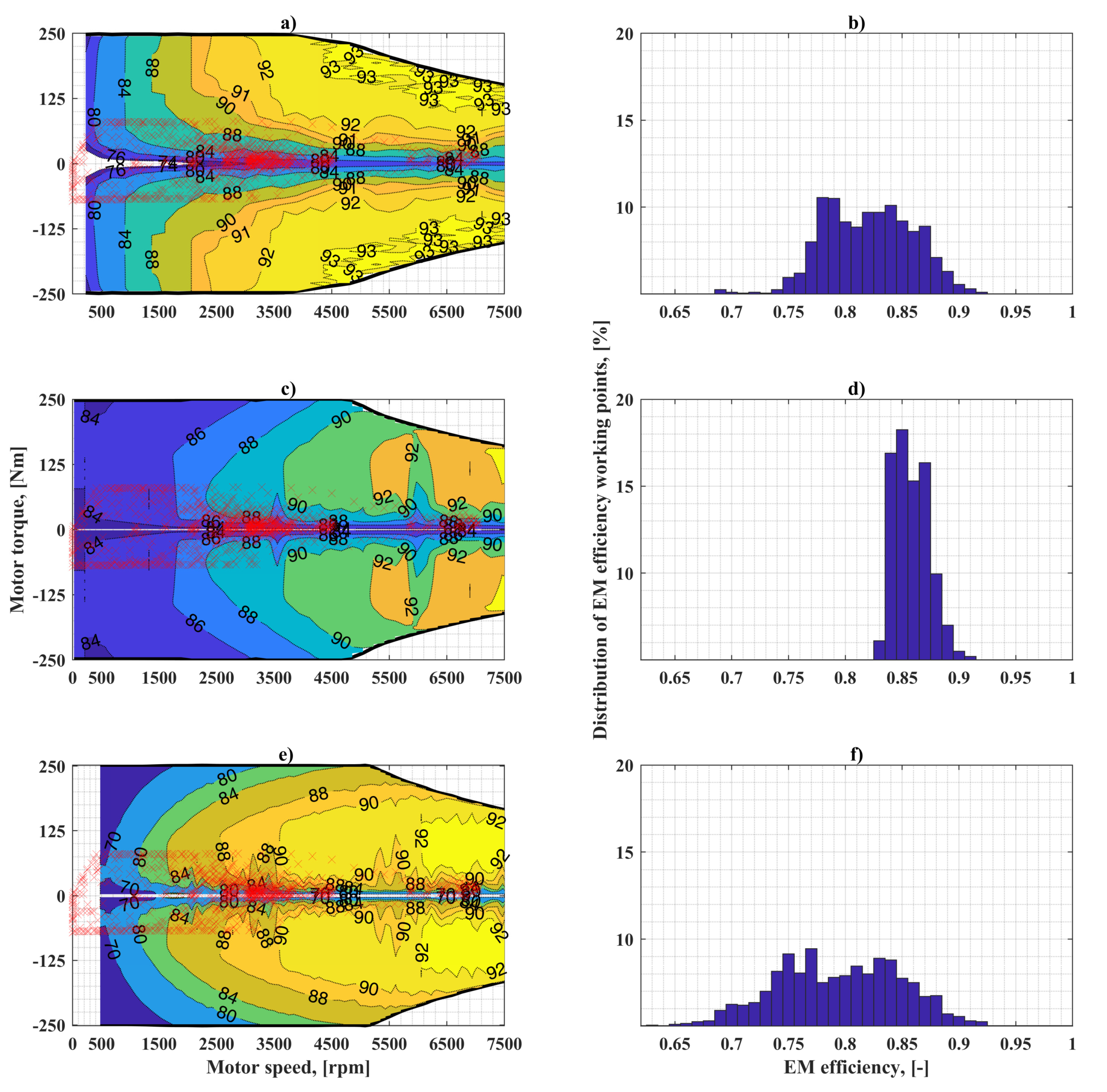
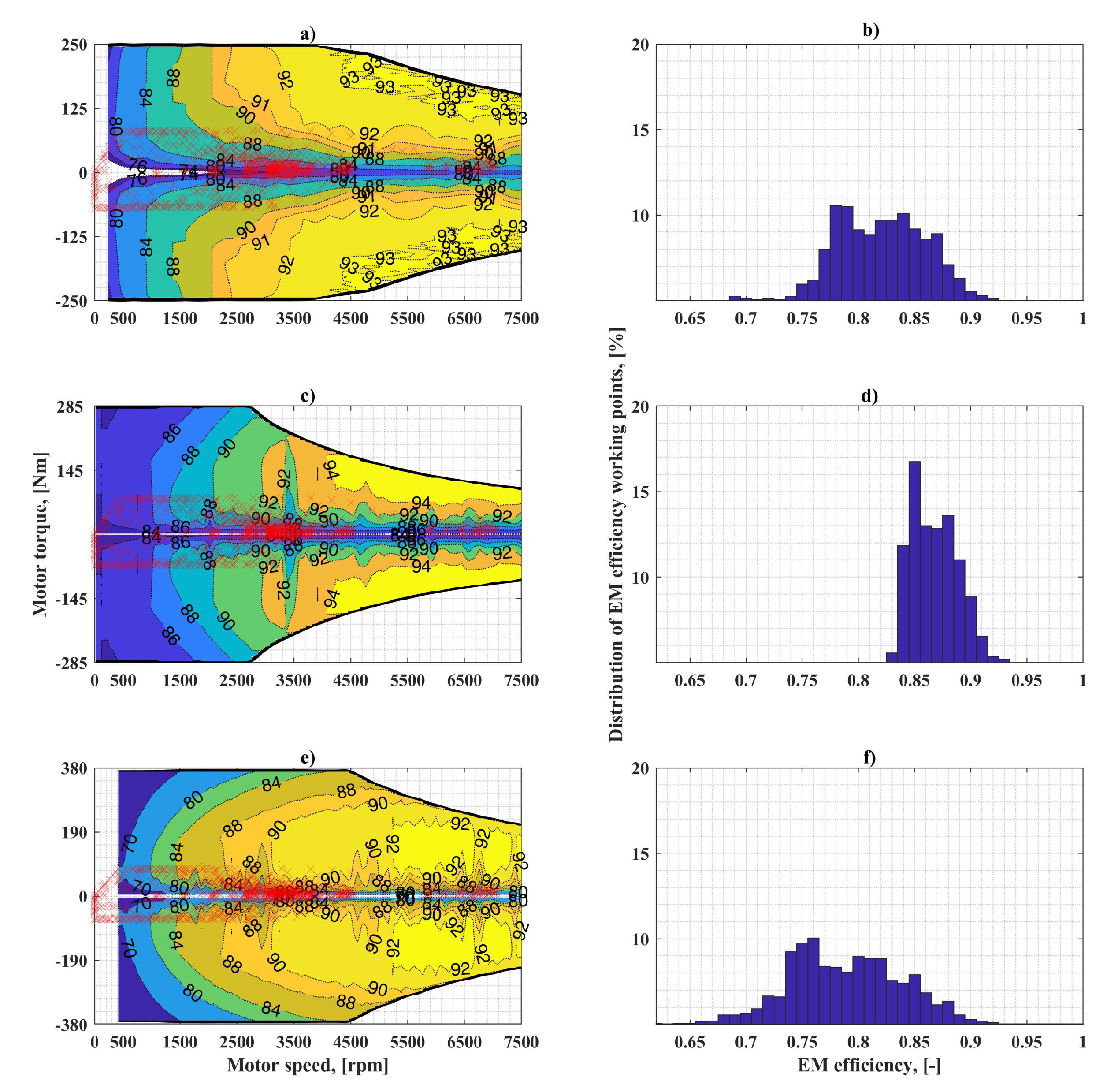
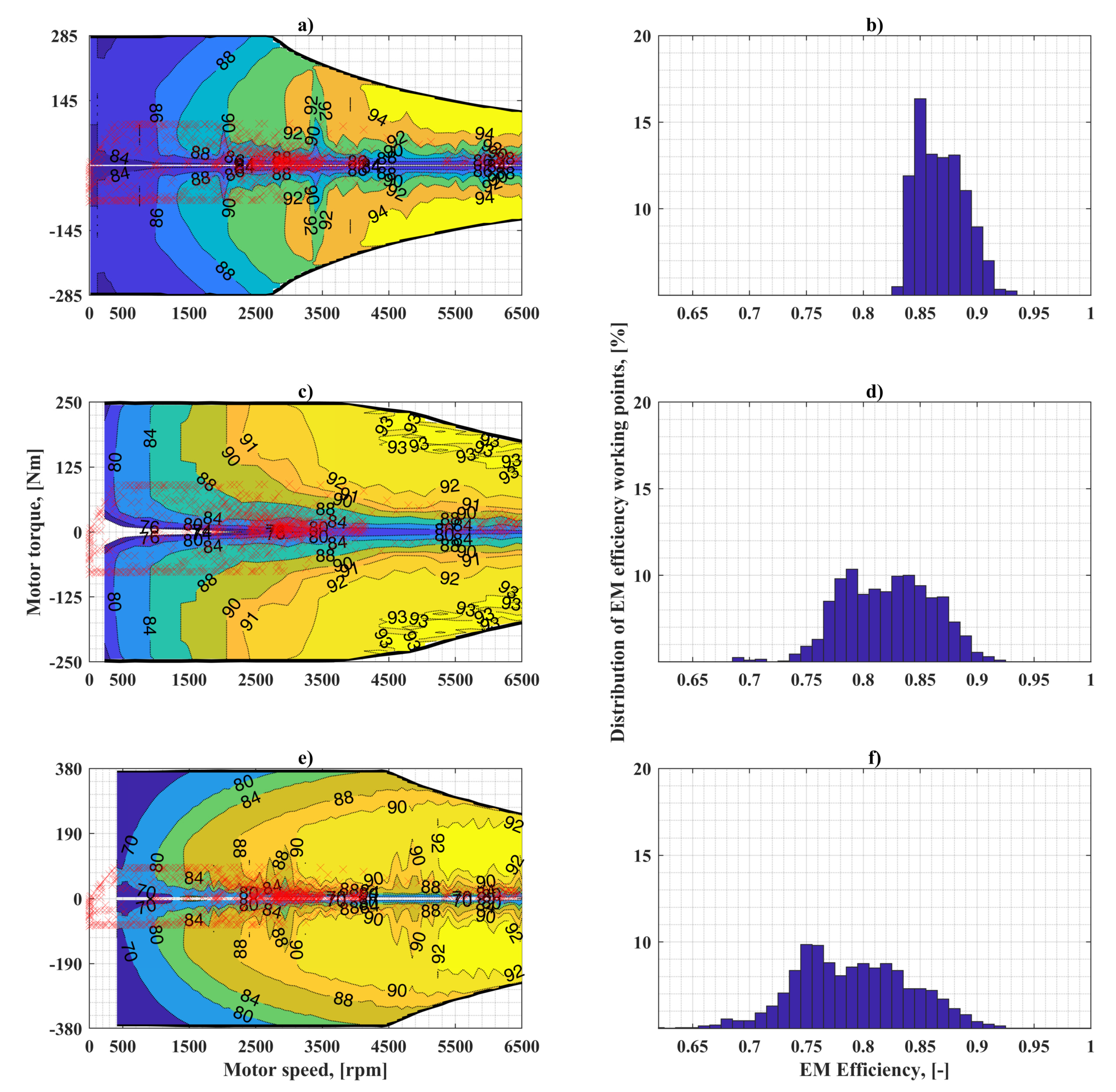
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BEV | Battery Electric Vehicle |
| UDDS | Urban Dynamometer Driving Schedule |
| EM | Electric Motor |
| SOC | State of Charge |
| OCV | Open Circuit Voltage |
| INL | Idaho National Laboratory |
References
- Buberger, J.; Kersten, A.; Kuder, M.; Eckerle, R.; Weyh, T.; Thiringer, T. Total CO2-Equivalent Life-Cycle Emissions from Commercially Available Passenger Cars. Renew. Sustain. Energy Rev. 2022, 159, 112158. [Google Scholar] [CrossRef]
- EU Plotting Ban on Internal Combustion Engine as of 2025: Industry. Available online: https://www.eceee.org/all-news/news/eu-plotting-ban-on-internal-combustion-engine-as-of-2025-industry/ (accessed on 23 January 2023).
- Jiménez, D.; Hernández, S.; Fraile-Ardanuy, J.; Serrano, J.; Fernández, R.; Álvarez, F. Modelling the Effect of Driving Events on Electrical Vehicle Energy Consumption Using Inertial Sensors in Smartphones. Energies 2018, 11, 412. [Google Scholar] [CrossRef] [Green Version]
- Varga, B.; Sagoian, A.; Mariasiu, F. Prediction of Electric Vehicle Range: A Comprehensive Review of Current Issues and Challenges. Energies 2019, 12, 946. [Google Scholar] [CrossRef] [Green Version]
- Szumska, E.M.; Jurecki, R.S. Parameters Influencing on Electric Vehicle Range. Energies 2021, 14, 4821. [Google Scholar] [CrossRef]
- Vatanparvar, K.; Faezi, S.; Burago, I.; Levorato, M.; Al Faruque, M.A. Extended Range Electric Vehicle with Driving Behavior Estimation in Energy Management. IEEE Trans. Smart Grid 2019, 10, 2959–2968. [Google Scholar] [CrossRef]
- Xie, Y.; Li, Y.; Zhao, Z.; Dong, H.; Wang, S.; Liu, J.; Guan, J.; Duan, X. Microsimulation of Electric Vehicle Energy Consumption and Driving Range. Appl. Energy 2020, 267, 115081. [Google Scholar] [CrossRef]
- Chakraborty, S.; Kumar, N.M.; Jayakumar, A.; Dash, S.K.; Elangovan, D. Selected Aspects of Sustainable Mobility Reveals Implementable Approaches and Conceivable Actions. Sustainability 2021, 13, 12918. [Google Scholar] [CrossRef]
- Skuza, A.; Jurecki, R.S. Analysis of Factors Affecting the Energy Consumption of an EV Vehicle-a Literature Study. IOP Conf. Ser. Mater. Sci. Eng. 2022, 1247, 012001. [Google Scholar] [CrossRef]
- Mruzek, M.; Gajdáč, I.; Kučera, L.; Barta, D. Analysis of Parameters Influencing Electric Vehicle Range. Procedia Eng. 2016, 134, 165–174. [Google Scholar] [CrossRef] [Green Version]
- Koch, A.; Bürchner, T.; Herrmann, T.; Lienkamp, M. Eco-Driving for Different Electric Powertrain Topologies Considering Motor Efficiency. World Electr. Veh. J. 2021, 12, 6. [Google Scholar] [CrossRef]
- Pathak, A.; Sethuraman, G.; Krapf, S.; Ongel, A.; Lienkamp, M. Exploration of Optimal Powertrain Design Using Realistic Load Profiles. World Electr. Veh. J. 2019, 10, 56. [Google Scholar] [CrossRef] [Green Version]
- Yildirim, M.; Kurt, S. Effect of Different Types of Electric Drive Units on the Energy Consumption of Heavy Commercial Electric Vehicles. World Electr. Veh. J. 2022, 13, 92. [Google Scholar] [CrossRef]
- Puma-Benavides, D.S.; Izquierdo-Reyes, J.; Galluzzi, R.; Calderon-Najera, J.D.D. Influence of the Final Ratio on the Consumption of an Electric Vehicle under Conditions of Standardized Driving Cycles. Appl. Sci. 2021, 11, 11474. [Google Scholar] [CrossRef]
- Ramakrishnan, K.; Stipetic, S.; Gobbi, M.; Mastinu, G. Optimal Sizing of Traction Motors Using Scalable Electric Machine Model. IEEE Trans. Transp. Electrif. 2018, 4, 314–321. [Google Scholar] [CrossRef]
- Pastellides, S.; Gerber, S.; Wang, R.-J.; Kamper, M. Evaluation of Drive Cycle-Based Traction Motor Design Strategies Using Gradient Optimisation. Energies 2022, 15, 1095. [Google Scholar] [CrossRef]
- Stipetic, S.; Goss, J.; Zarko, D.; Popescu, M. Calculation of Efficiency Maps Using a Scalable Saturated Model of Synchronous Permanent Magnet Machines. IEEE Trans. Ind. Appl. 2018, 54, 4257–4267. [Google Scholar] [CrossRef]
- Downloadable Dynamometer Database of Transportation and Power Systems Division of Argonne National Laboratory. Available online: https://www.anl.gov/taps/downloadable-dynamometer-database (accessed on 23 January 2023).
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Onori, S.; Serrao, L.; Rizzoni, G. Hybrid Electric Vehicles; Springer: London, UK, 2016. [Google Scholar] [CrossRef]
- D3 2014 BMW i3BEV. Available online: https://www.anl.gov/taps/d3-2014-bmw-i3bev (accessed on 23 January 2023).
- D3 2015 Kia Soul Electric. Available online: https://www.anl.gov/taps/d3-2015-kia-soul-electric (accessed on 23 January 2023).
- Chassis Dynamometer Testing Reference Document. Available online: https://anl.app.box.com/s/5tlld40tjhhhtoj2tg0n4y3fkwdbs4m3 (accessed on 23 January 2023).
- EPA Urban Dynamometer Driving Schedule (UDDS). Available online: https://www.epa.gov/emission-standards-referenceguide/epa-urban-dynamometer-driving-schedule-udds (accessed on 26 July 2022).
- EPA Highway Fuel Economy Test Cycle (HWFET). Available online: https://dieselnet.com/standards/cycles/hwfet.php (accessed on 26 July 2022).
- Supplemental Federal Test Procedure (SFTP)–US06. Available online: https://dieselnet.com/standards/cycles/ftpus06.php (accessed on 26 July 2022).
- Castellazzi, L.; Ruzimov, S.; Bonfitto, A.; Tonoli, A.; Amati, N. A Method for Battery Sizing in Parallel P4 Mild Hybrid Electric Vehicles. Sae Int. J. Electrified Veh. 2021, 11, 97–111. [Google Scholar] [CrossRef]
- Mavlonov, J.; Ruzimov, S.; Mukhitdinov, A. Modelling of Energy Consumption of the Battery Electric Vehicle. Acta Turin Polytech. Univ. Tashkent 2022, 31, 7–13. [Google Scholar]
- Yakhshilikova, G.; Ezemobi, E.; Ruzimov, S.; Tonoli, A. Battery Sizing for Mild P2 HEVs Considering the Battery Pack Thermal Limitations. Appl. Sci. 2021, 12, 226. [Google Scholar] [CrossRef]
- Miri, I.; Fotouhi, A.; Ewin, N. Electric Vehicle Energy Consumption Modelling and Estimation—A Case Study. Int. J. Energy Res. 2020, 45, 501–520. [Google Scholar] [CrossRef]
- Kia Soul EVchip-Range Extender and Regenerative Force Improvement. Available online: https://www.evmotion.eu/evchip/soulchip-range-extender-and-regenerative-force-improvement (accessed on 23 January 2023).
- YASA P400 R Series E-Motors. Available online: https://www.yasa.com/wp-content/uploads/2018/01/YASA_P400_Product_Sheet.pdf (accessed on 22 January 2023).
- Idaho National Laboratory, Advanced Vehicles, Library-By Vehicle. Available online: https://avt.inl.gov/content/pubs-vehicles.html (accessed on 23 January 2023).
- Battery Pack Laboratory Testing Results: 2015 Kia Soul. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/batterySoul1908.pdf (accessed on 23 January 2023).
- Battery Pack Laboratory Testing Results: 2014 BMW i3 EV. Available online: https://avt.inl.gov/sites/default/files/pdf/fsev/batteryi5486.pdf (accessed on 23 January 2023).
- Sanjarbek, R.; Mavlonov, J.; Mukhitdinov, A. Analysis of the Powertrain Component Size of Electrified Vehicles Commercially Available on the Market. Commun. Sci. Lett. Univ. Zilina 2022, 24, B74–B86. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Specifications | Value (BMW i3) | Value (Kia Soul) | Unit |
|---|---|---|---|
| Vehicle weight | 1443.3 | 1663.8 | kg |
| Frontal area | 2.38 | 2.418 | m |
| Aerodynamic drag coefficient | 0.3 | 0.3 | - |
| Motor operating range | 0–11,470 | 0–10,360 | rpm |
| Max power | 125@ 4778 | 81@ 2715 | kW@rpm |
| Max torque | 250@ 0–3897 | 285@ 0–2654 | Nm@rpm |
| Transmission type | Single speed AT | Single speed AT | - |
| Final gear ratio | 9.7:1 | 8.2:1 | - |
| Tire radius | 0.33 (150/60 R20) | 0.30 (205/60 R16) | m |
| Battery type | Lithium-ion | Lithium-ion | - |
| Number of cells | 96 | 96 | - |
| Nominal cell capacity | 60 | 75 | Ah |
| Nominal cell voltage | 3.7 | 3.7 | V |
| Nominal battery pack voltage | 355.2 | 355.2 | V |
| Nominal battery pack energy | 22 | 27 | kWh |
| EMs | , [kW] | EM Speed at , [rpm] | EM Torque at , [Nm] |
|---|---|---|---|
| BMW i3 | 125 | 4778 | 250 |
| Kia Soul | 81 | 2715 | 285 |
| YASA EM | 160 | 4132 | 372 |
| Electric Vehicle | Electric Motors | |
|---|---|---|
| BMW i3 EM original | BMW i3 EM original | |
| BMW i3 | Kia Soul EM re-scaled to BMW i3 EM | Kia Soul EM original |
| YASA EM re-scaled to BMW i3 EM | YASA EM original | |
| Kia Soul EM original | Kia Soul EM original | |
| Kia Soul | BMW i3 EM re-scaled to Kia Soul EM | BMW i3 EM original |
| YASA EM re-scaled to Kia Soul EM | YASA EM original | |
| BEVs | EMs | 23 C | −7 C | 35 C | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SOC, [%] | SOC, [%] | Diff.exp [%] | SOC, [%] | SOC, [%] | Diff.exp [%] | SOC, [%] | SOC, [%] | Diff.exp [%] | ||
| BMW | BMW | 91.8 | 86.7 | 0 | 91 | 77.4 | 0 | 92.3 | 86.1 | 0 |
| Kia | 91.8 | 86.9 | +3.9 | 91 | 77.8 | +2.9 | 92.3 | 86.4 | +4.8 | |
| YASA | 91.8 | 86.5 | −3.9 | 91 | 77.2 | −1.5 | 92.3 | 85.8 | −4.8 | |
| Kia | Kia | 37.5 | 29.5 | 0 | 30.5 | 25.5 | 0 | 95 | 88.5 | 0 |
| BMW | 37.5 | 29.3 | −2.5 | 30.5 | 25.3 | −4 | 95 | 88.2 | −4.6 | |
| YASA | 37.5 | 29.1 | −5 | 30.5 | 25.1 | −8 | 95 | 87.9 | −8 | |
| BEVs | EMs | 23 C | −7 C | 35 C | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| SOC, [%] | SOC, [%] | Diff.exp [%] | SOC, [%] | SOC, [%] | Diff.exp [%] | SOC, [%] | SOC, [%] | Diff.exp [%] | ||
| BMW | BMW | 91.8 | 86.7 | 0 | 91 | 77.4 | 0 | 92.3 | 86.1 | 0 |
| Kia | 91.8 | 87.2 | +9.8 | 91 | 78.1 | +5.1 | 92.3 | 86.8 | +11 | |
| YASA | 91.8 | 86.3 | −7.8 | 91 | 77 | −2.9 | 92.3 | 85.5 | −9.6 | |
| Kia | Kia | 37.5 | 29.5 | 0 | 30.5 | 25.5 | 0 | 95 | 88.5 | 0 |
| BMW | 37.5 | 29 | −6.25 | 30.5 | 25.1 | −8 | 95 | 88 | −7.7 | |
| YASA | 37.5 | 28.8 | −8.7 | 30.5 | 24.9 | −10 | 95 | 87.7 | −10 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mavlonov, J.; Ruzimov, S.; Tonoli, A.; Amati, N.; Mukhitdinov, A. Sensitivity Analysis of Electric Energy Consumption in Battery Electric Vehicles with Different Electric Motors. World Electr. Veh. J. 2023, 14, 36. https://doi.org/10.3390/wevj14020036
Mavlonov J, Ruzimov S, Tonoli A, Amati N, Mukhitdinov A. Sensitivity Analysis of Electric Energy Consumption in Battery Electric Vehicles with Different Electric Motors. World Electric Vehicle Journal. 2023; 14(2):36. https://doi.org/10.3390/wevj14020036
Chicago/Turabian StyleMavlonov, Jamshid, Sanjarbek Ruzimov, Andrea Tonoli, Nicola Amati, and Akmal Mukhitdinov. 2023. "Sensitivity Analysis of Electric Energy Consumption in Battery Electric Vehicles with Different Electric Motors" World Electric Vehicle Journal 14, no. 2: 36. https://doi.org/10.3390/wevj14020036