
Multiple Synchronous Rotating Frame Transformation-Based 12th Current Harmonic Suppression Method for an IPMSM


Abstract
:1. Introduction
2. Current Harmonic Analysis of IPMSM Vector Control System Considering Back-EMF Nonsinusoidal and Dead-Time Effects
2.1. IPMSM Harmonic Mathematical Model in Vector Control System
2.2. Analysis of Permanent Magnet Flux Harmonics and Current Harmonics
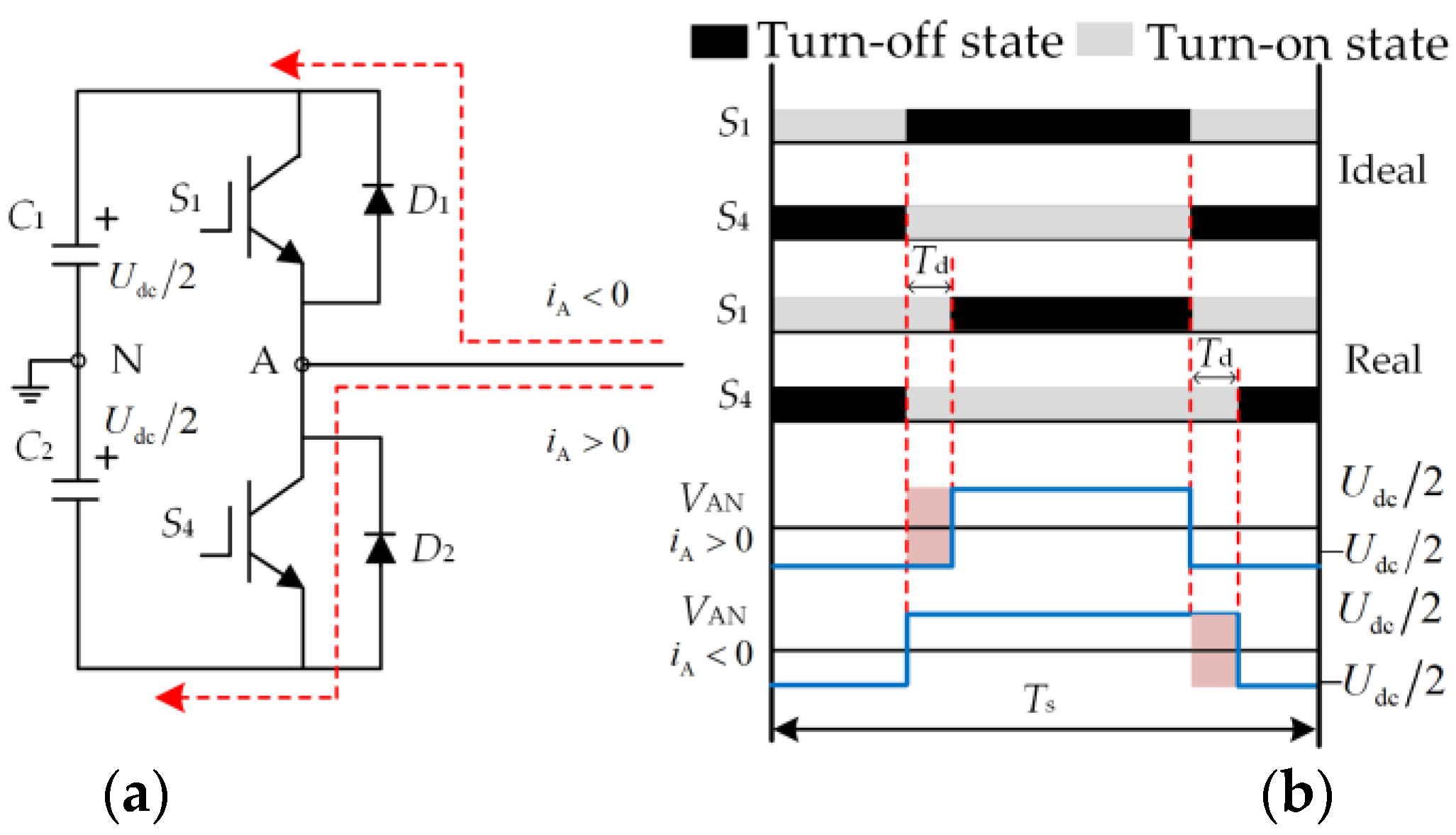
2.3. Analysis of the Inverter’s Dead-Time Effect and Current Harmonics
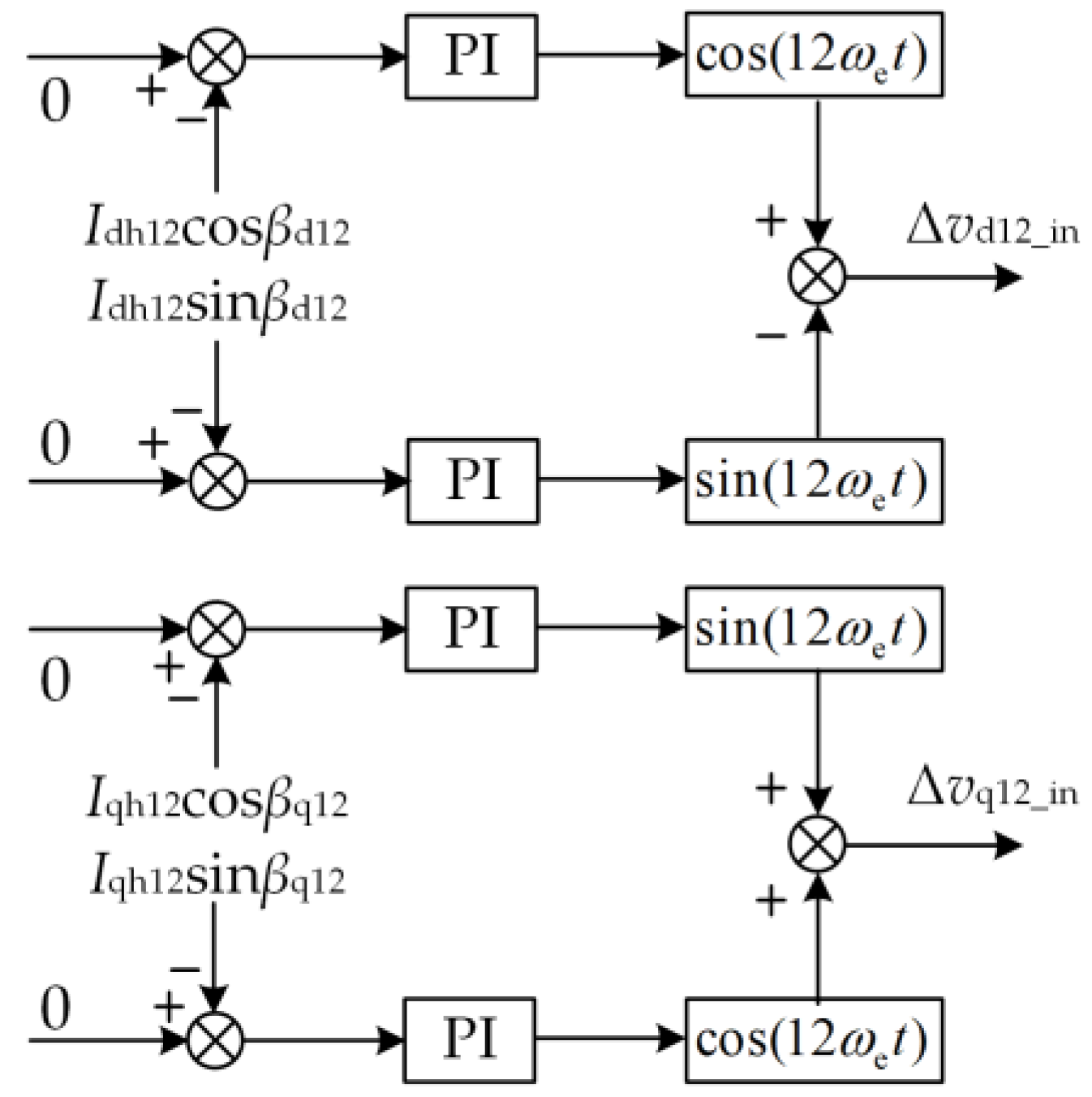
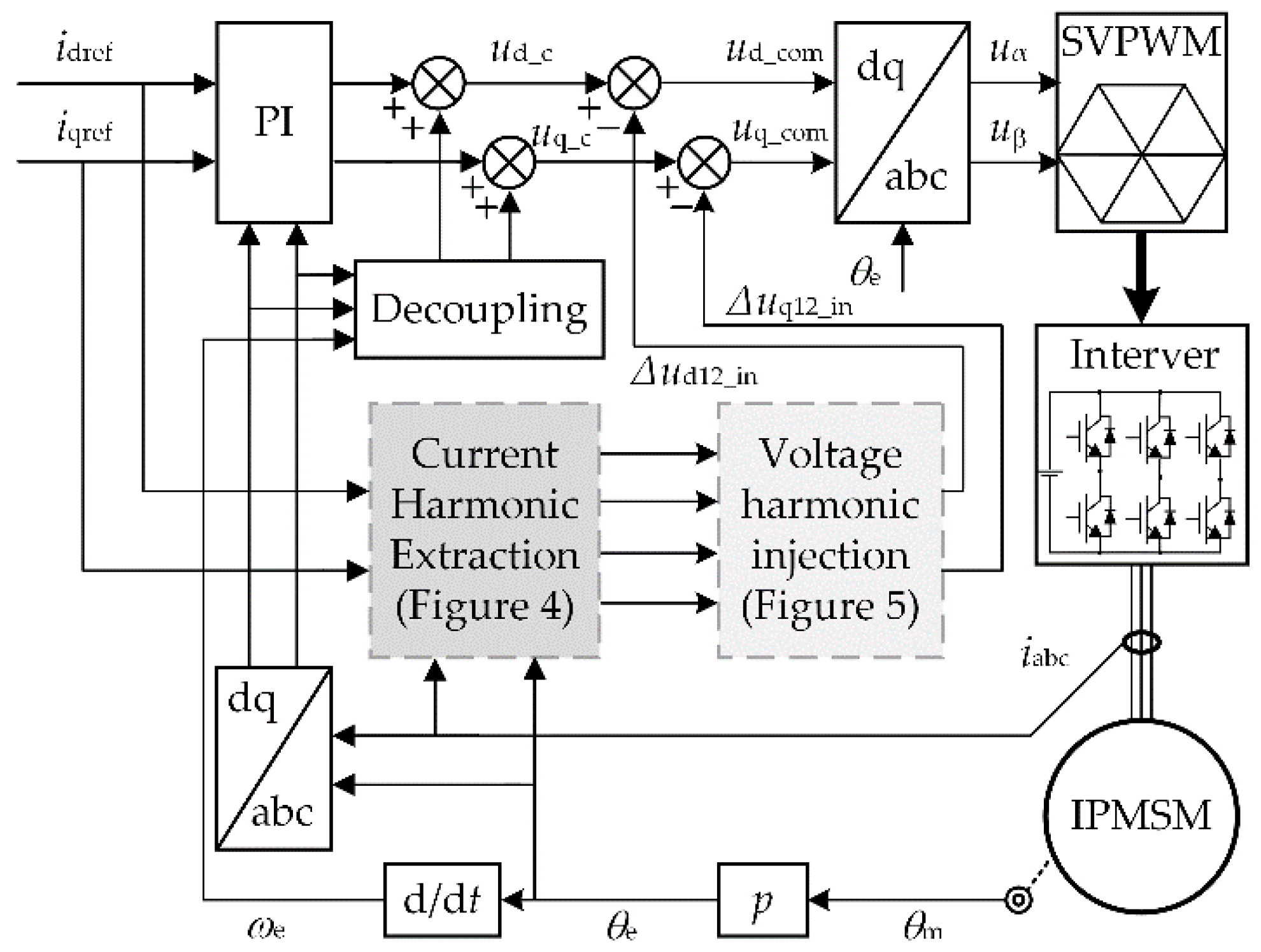
3. The Proposed Current Harmonic Suppression Strategy
4. Simulation Results
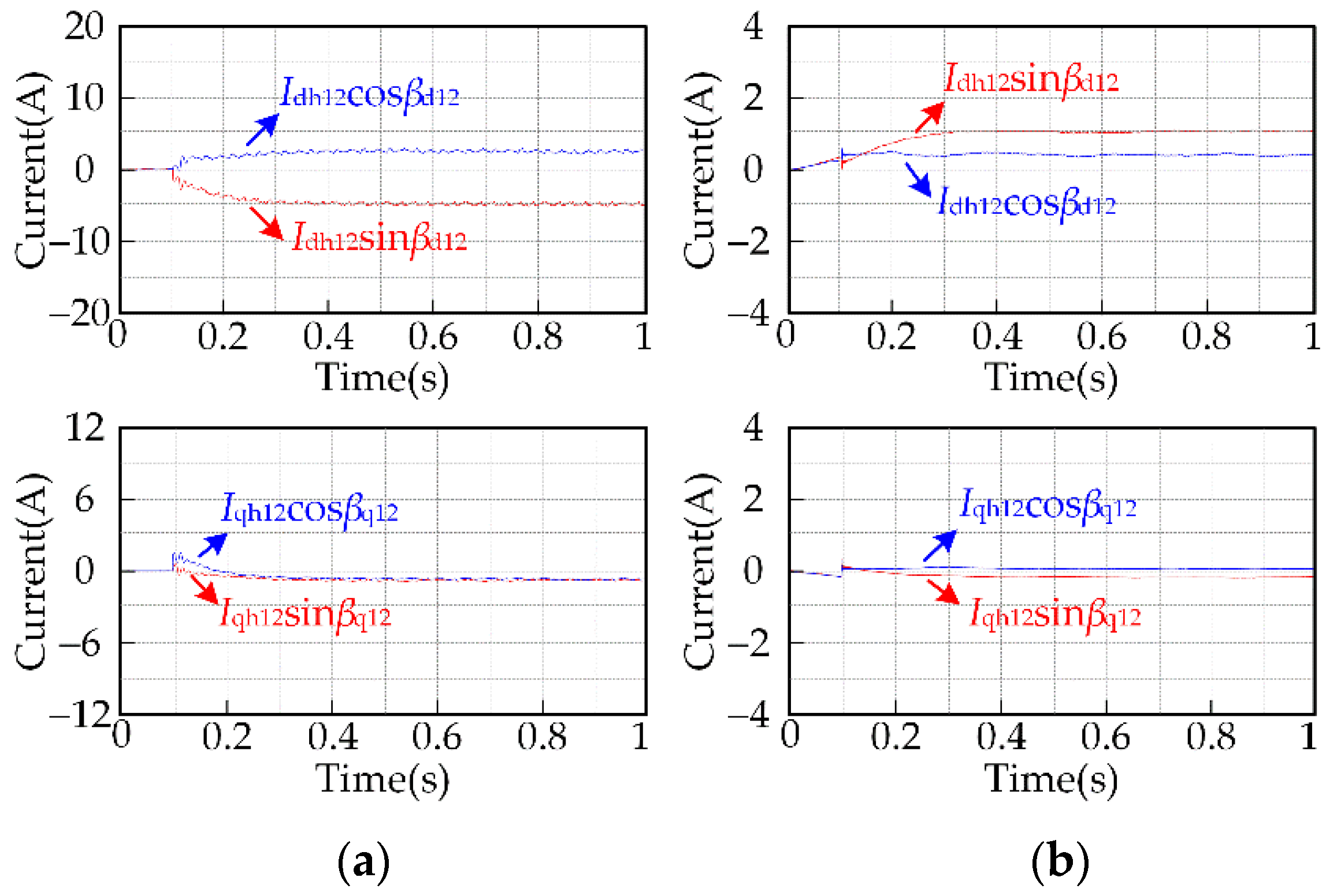
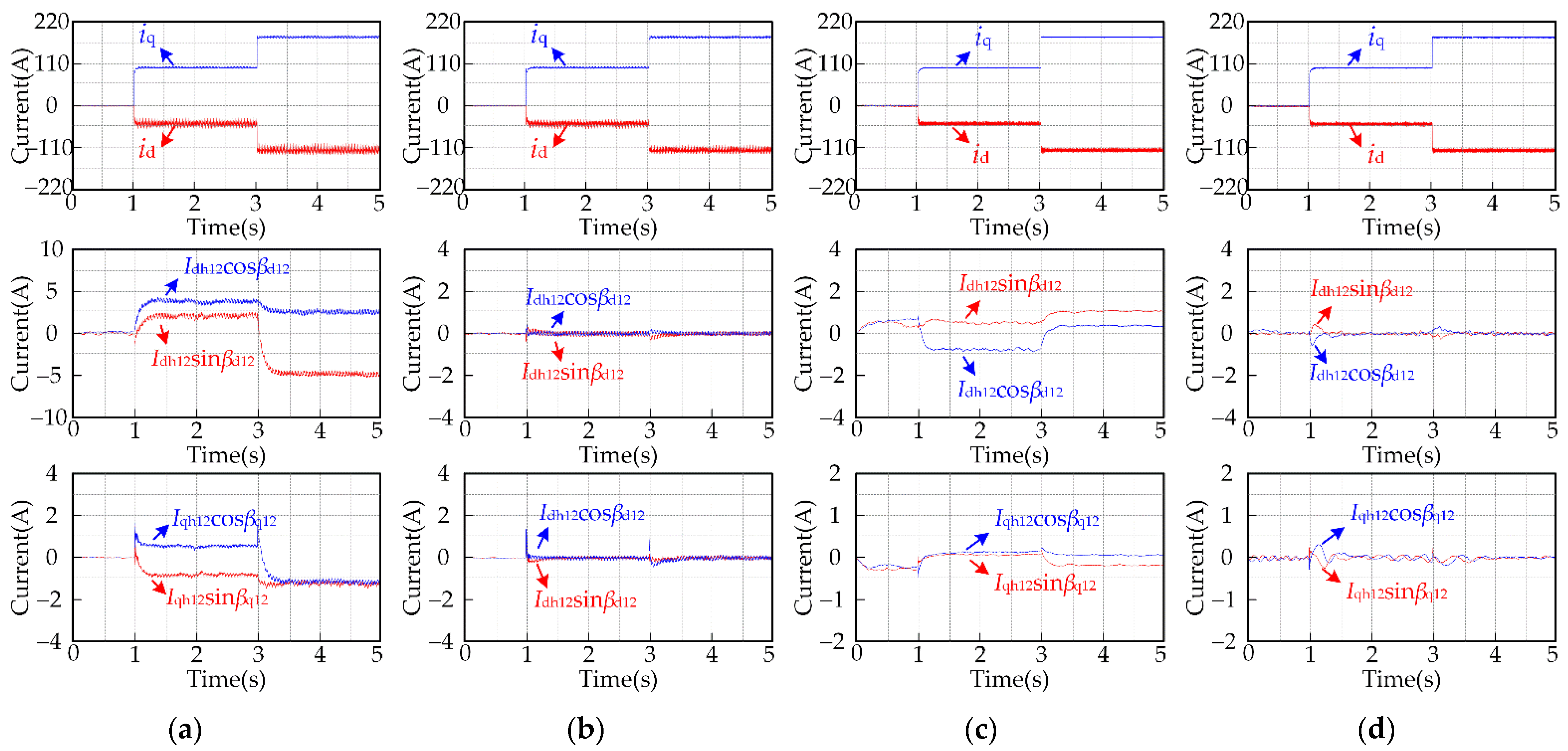
4.1. Simulation Results for the Proposed Harmonic Extraction Method
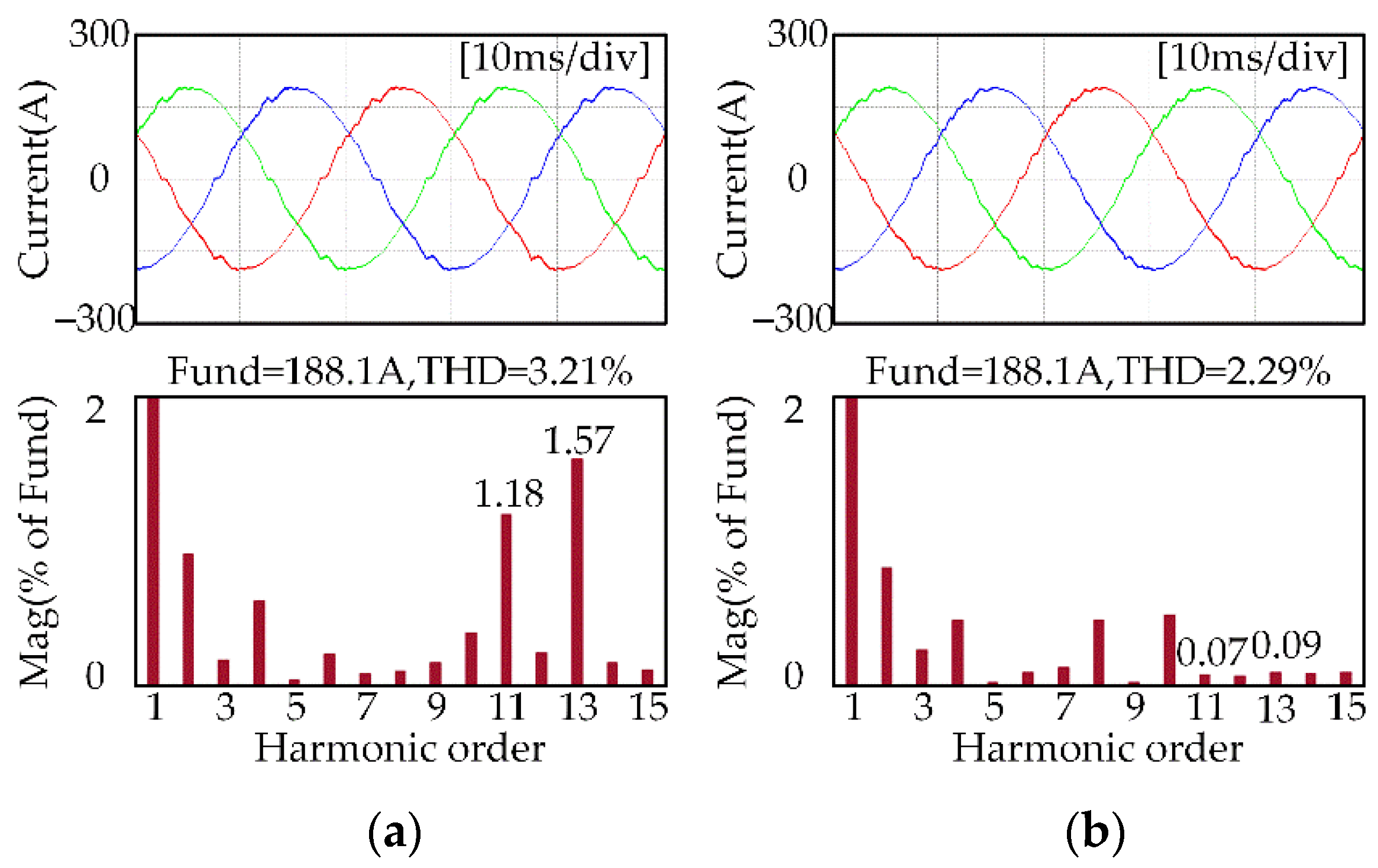
4.2. Simulation Results for the Proposed Current Harmonic Suppression Strategy
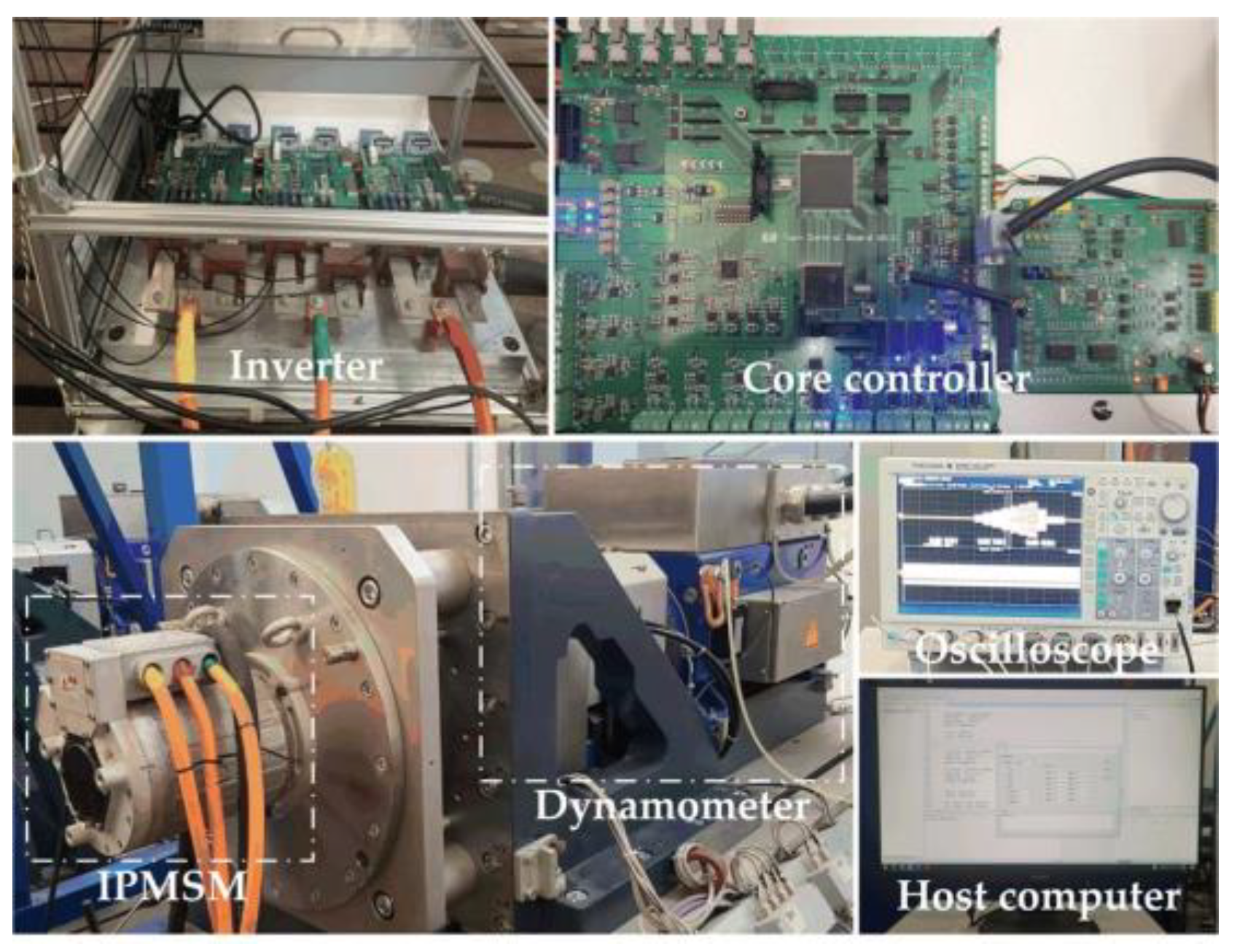
5. Experimental Results
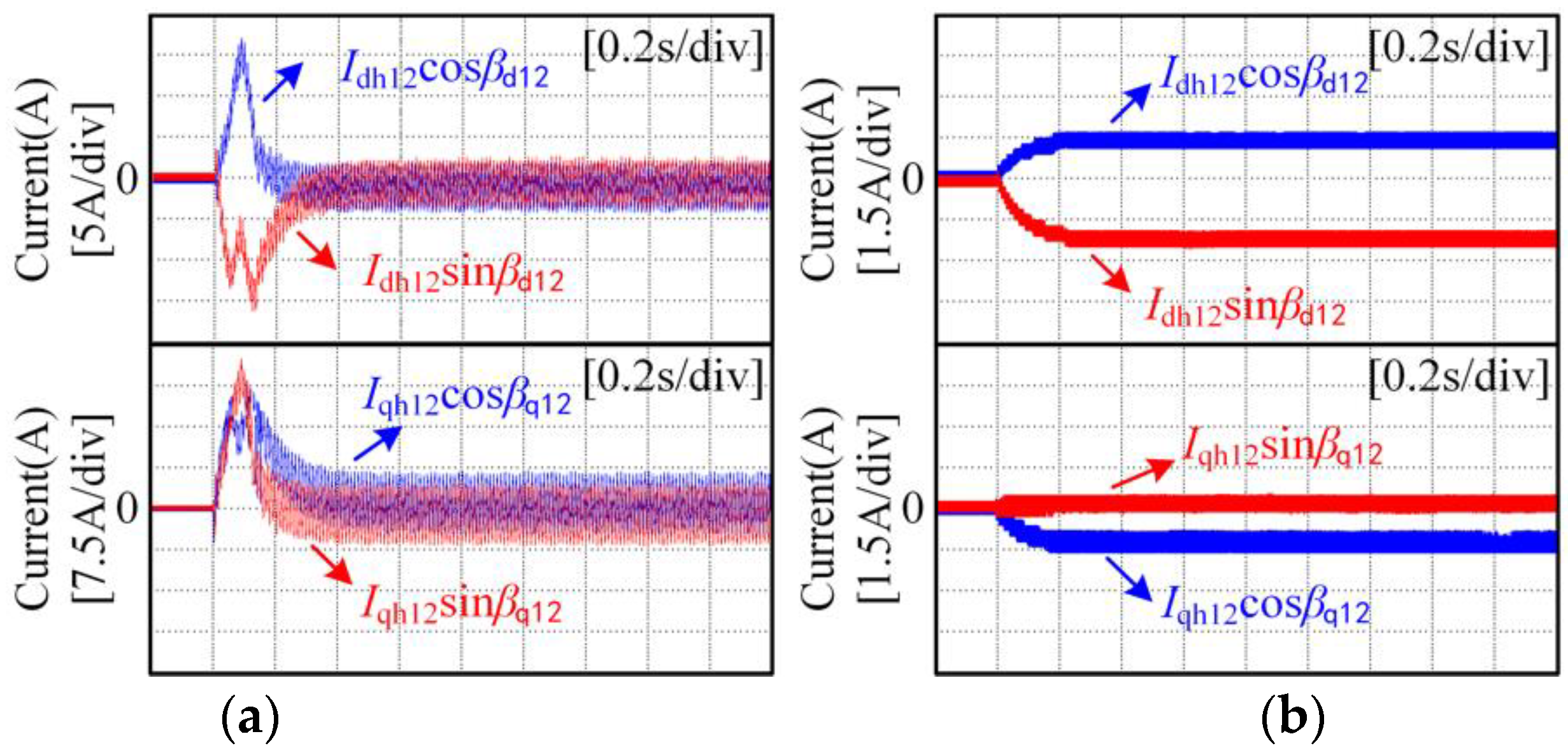
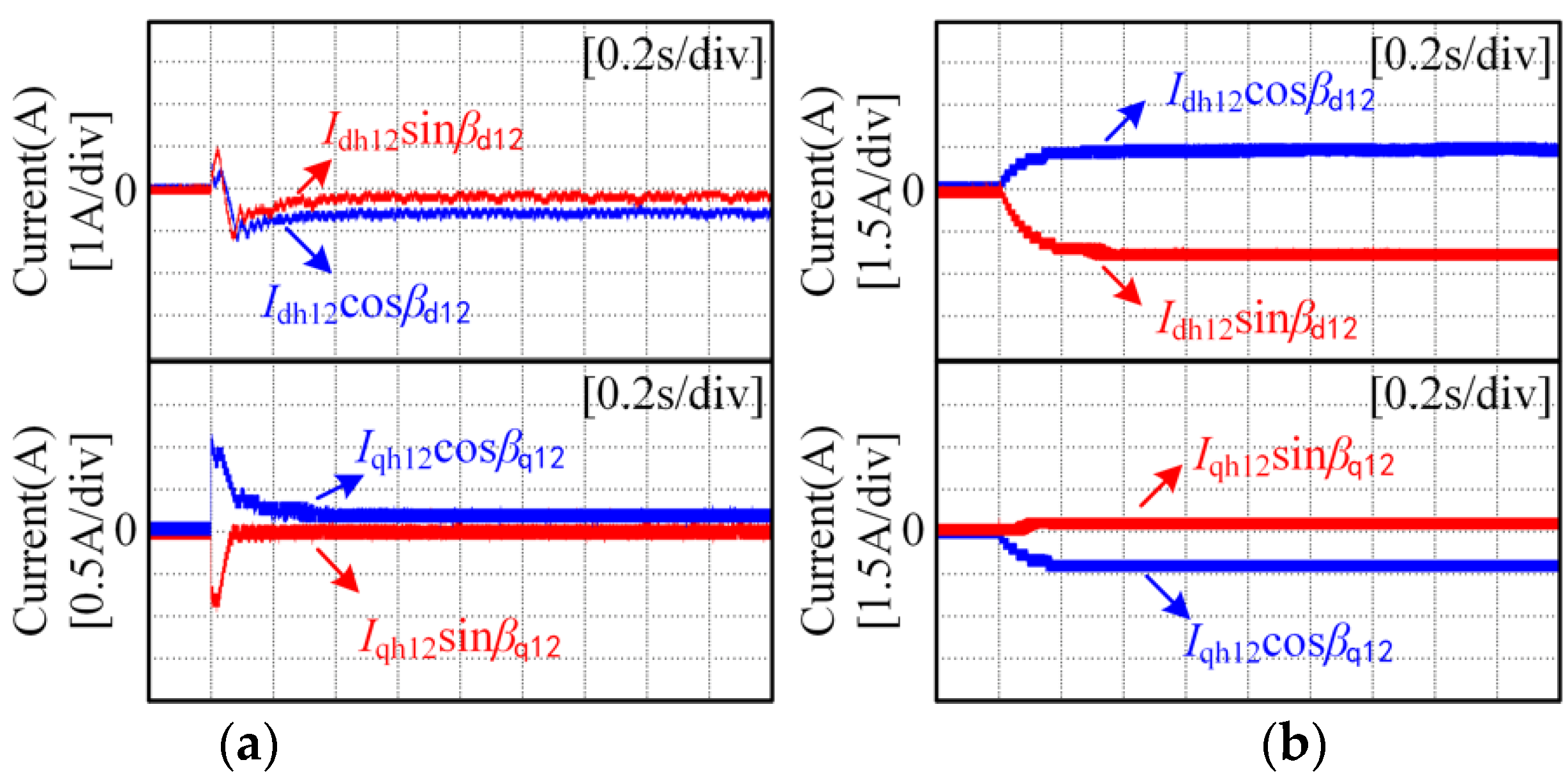
5.1. Experimental Results for the Proposed Harmonic Extraction Method
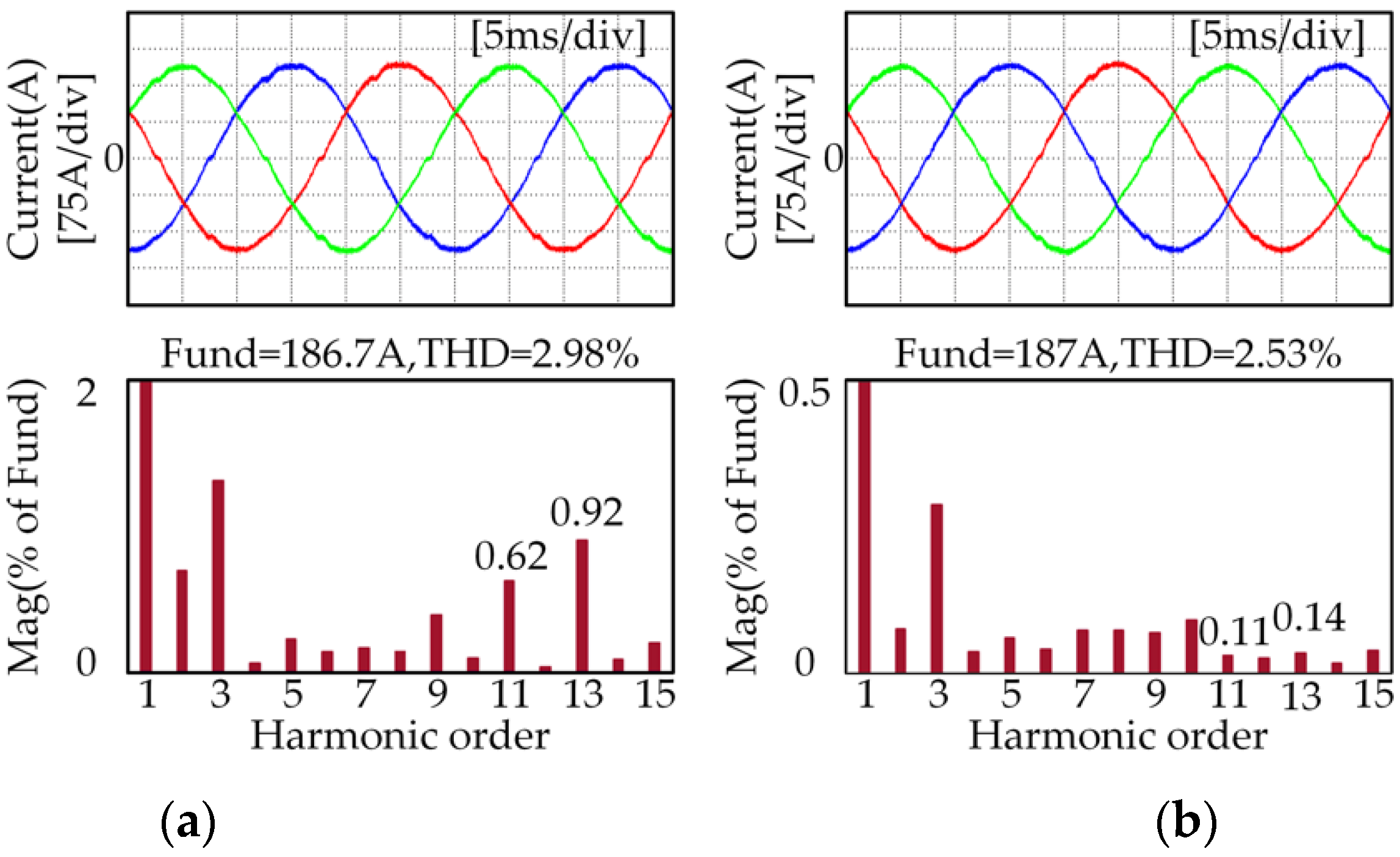
5.2. Experimental Results for the Proposed Current Harmonic Suppresion Strategy
6. Conclusions
- The influencing factors of the current harmonics in the IPMSM vector control system were theoretically analyzed, and the influence mechanism of the inverter dead-time effect and permanent magnet flux linkage harmonics on current harmonics was expounded;
- Based on the MSRFT, a simple current harmonic extraction method was proposed. The proposed method can accurately extract the 12th current harmonic components in the d-q axis current without increasing the difficulty of the algorithm;
- Based on the extracted harmonic current components, a harmonic voltage generation strategy was established, and a current harmonic suppression strategy was formed with the proposed current harmonic extraction method;
- The feasibility and effectiveness of the proposed method were verified via MATLAB/Simulink simulations and experiments, respectively. The simulation and experimental results showed that the proposed current harmonic extract method can accurately extract the current harmonic components, and the proposed current harmonic suppression strategy can effectively suppress the 11th and 13th harmonics in the IPMSM stator three-phase current.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, Z.; Shi, T.; Lin, Z.; Wang, Z.; Gu, X. Analysis and Control of Current Harmonic in IPMSM Field-Oriented Control System. IEEE Trans. Power Electron. 2022, 37, 9571–9585. [Google Scholar] [CrossRef]
- Li, Y.; Lu, H.; Qu, W.; Sheng, S. Improved repetitive control for inverter current harmonics suppression. J. Tsinghua Univ. Sci. Technol. 2013, 53, 1030–1035. [Google Scholar]
- Tang, Z.; Akin, B. Suppression of Dead-Time Distortion Through Revised Repetitive Controller in PMSM Drives. IEEE Trans. Energy Convers. 2017, 32, 918–930. [Google Scholar] [CrossRef]
- Wei, Y.; Luo, X.; Zhu, L.; Zhao, J. Research on current harmonic suppression strategy of high saliency ratio permanent magnet synchronous motor based on proportional resonance controller. Proc. CSEE 2021, 41, 2526–2538. [Google Scholar]
- Mai, Z.; Xiao, F.; Liu, J.; Zhang, W.; Liang, C. Harmonic current suppression strategy of dual three-phase permanent magnet synchronous motor based on quasi proportional resonant cascading PI. Trans. CES 2018, 33, 5751–5759. [Google Scholar]
- Li, Y.; Lu, H.; Qu, W.; Sheng, S. A permanent magnet synchronous motor current suppression method based on resonant controllers. Proc. CSEE 2014, 34, 423–430. [Google Scholar]
- Shen, Z.; Jiang, D. Dead-Time Effect Compensation Method Based on Current Ripple Prediction for Voltage-Source Inverters. IEEE Trans. Power Electron. 2019, 34, 971–983. [Google Scholar] [CrossRef]
- Lee, D.; Ahn, J. A simple and Direct Dead-Time Effect Compensation Scheme in PWM-VIS. IEEE Trans. Ind. Appl. 2014, 50, 3017–3025. [Google Scholar] [CrossRef]
- Qiu, T.; Wen, X.; Zhao, F. Adaptive-Linear-Neuron-Based Dead-Time Effects Compensation Scheme for PMSM Drives. IEEE Trans. Power Electron. 2016, 31, 2530–2538. [Google Scholar] [CrossRef]
- Wang, L.; Zhu, Z.; Bin, H.; Gong, L. Current Harmonic Suppression Strategy for PMSM With Nonsinusoidal Back-EMF Based on Adaptive Linear Neuron Method. IEEE Trans. Ind. Electron. 2022, 67, 9164–9173. [Google Scholar] [CrossRef]
- Li, S.; Sun, L.; Liui, X.; An, Q. Current Harmonics Suppression Strategies of Permanent Magnet Synchronous Motor. Trans. CES 2019, 34, 87–96. [Google Scholar]
- Yi, P.; Wang, X.; Sun, Z. Instantaneous Harmonic Decomposition Technique for Three-phase Current Based on Multiple Reference Coordinates. IET Electr. Power Appl. 2018, 12, 547–556. [Google Scholar] [CrossRef]
- Liu, G.; Chen, B.; Wang, K.; Song, X. Selective Current Harmonic Suppression for High-Speed PMSM Based on High-Precision Harmonic Detection Method. IEEE Trans. Ind. Inform. 2019, 15, 3457–3468. [Google Scholar] [CrossRef]
- Wang, W.; Liu, C.; Liu, S.; Song, Z.; Zhao, H.; Dai, B. Current Harmonic Suppression for Permanent-Magnet Synchronous Motor Based on Chebyshev Filter and PI Controller. IEEE Trans. Magn. 2021, 57, 3017671. [Google Scholar] [CrossRef]
- Li, S.; Xiao, Y.; Liang, J.; Meng, L. Harmonic Current Suppression of Permanent Magnet Synchronous Motor Based on Closed-Loop Current Average Method. Electr. Mach. Control. Appl. 2019, 46, 51–57. [Google Scholar]
- Qi, G.; Wang, Z.; Zhang, L. Research on Harmonic Suppression Strategy of Permanent Magnet Synchronous Motor Stator Phase Current Based on Coordinate Transformation and Current Average Method. Small Spec. Electr. Mach. 2020, 48, 17. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Pole pairs | np | 4 |
| Permanent magnet flux linkage | λf | 0.038749 Wb |
| Stator resistance | Rs | 0.003 Ω |
| d-axis inductance | Ld | 0.1099 mH |
| q-axis inductance | Lq | 0.3453 mH |
| Rated speed | n | 3000 rpm |
| Rated torque | TN | 72 Nm |
| Rated voltage | UN | 320 V |
| Rated current | IN | 180 A |
| Control frequency | fs | 10 kHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Miao, Q.; Zeng, P.; Lin, Z.; Li, Y.; Li, X. Multiple Synchronous Rotating Frame Transformation-Based 12th Current Harmonic Suppression Method for an IPMSM. World Electr. Veh. J. 2022, 13, 194. https://doi.org/10.3390/wevj13100194
Xu Y, Miao Q, Zeng P, Lin Z, Li Y, Li X. Multiple Synchronous Rotating Frame Transformation-Based 12th Current Harmonic Suppression Method for an IPMSM. World Electric Vehicle Journal. 2022; 13(10):194. https://doi.org/10.3390/wevj13100194
Chicago/Turabian StyleXu, Yamei, Qiang Miao, Pin Zeng, Zhichen Lin, Yiyang Li, and Xinmin Li. 2022. "Multiple Synchronous Rotating Frame Transformation-Based 12th Current Harmonic Suppression Method for an IPMSM" World Electric Vehicle Journal 13, no. 10: 194. https://doi.org/10.3390/wevj13100194