Forest Cover Database Updates Using Multi-Seasonal RapidEye Data—Storm Event Assessment in the Bavarian Forest National Park


 , and
, and
Abstract
:1. Introduction
- -
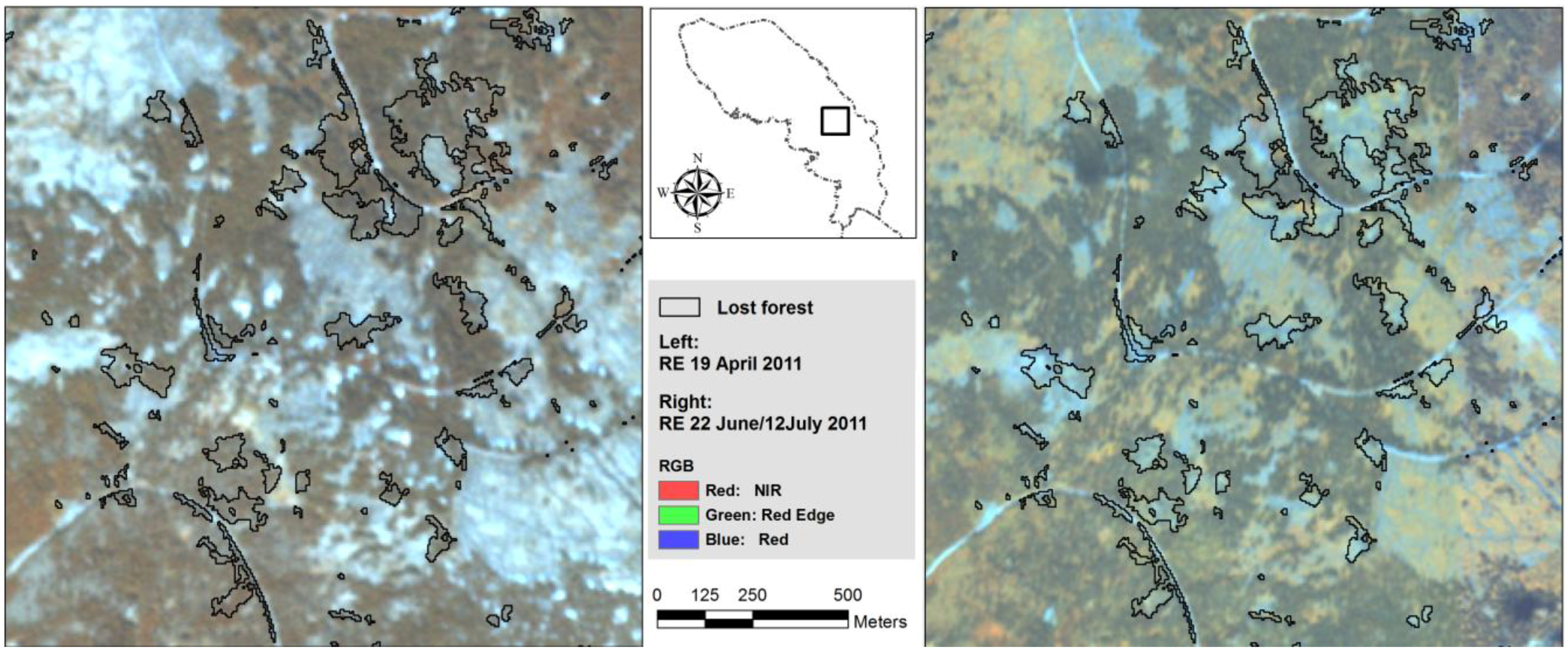
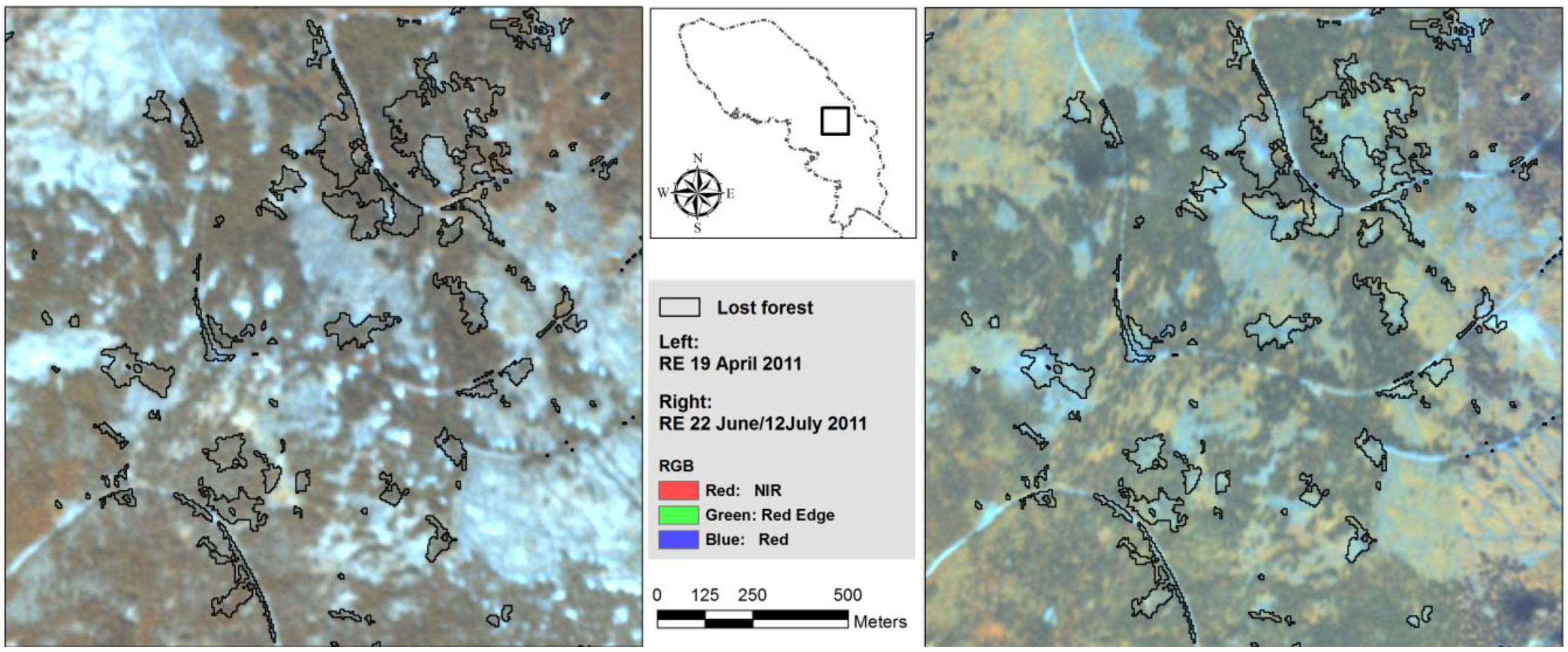
- first period, between 19 April, 2011, and 22 June/12 July, 2011, helped to update the forest cover figures obtained from the most recent forest inventory for the area, which was done in order to document changes due to regular management practices.
- -
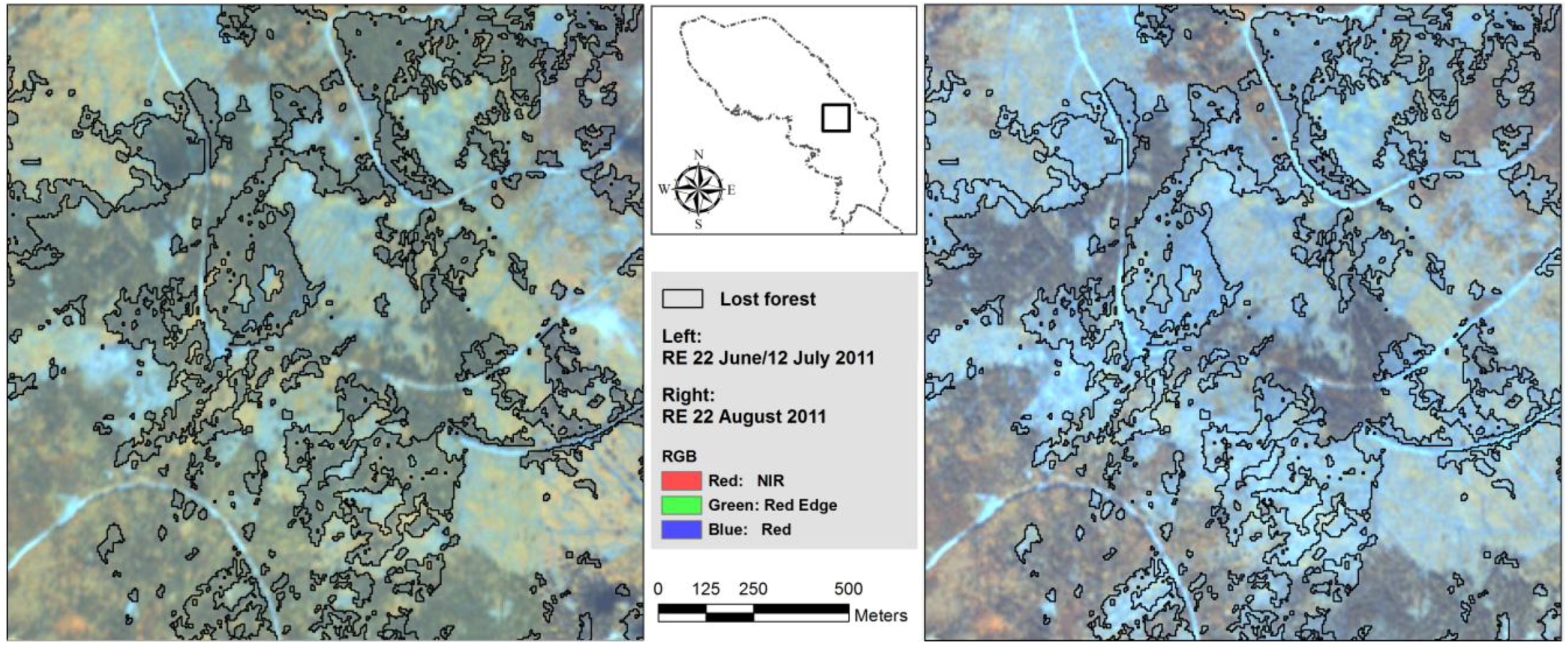
- The second period, between 22 June/12 July, 2011 and 22 August, 2011, was after the above-mentioned storm event had occurred. This helped to demonstrate the evaluation chain for sudden catastrophic events by applying the same method.
2. Experimental Section
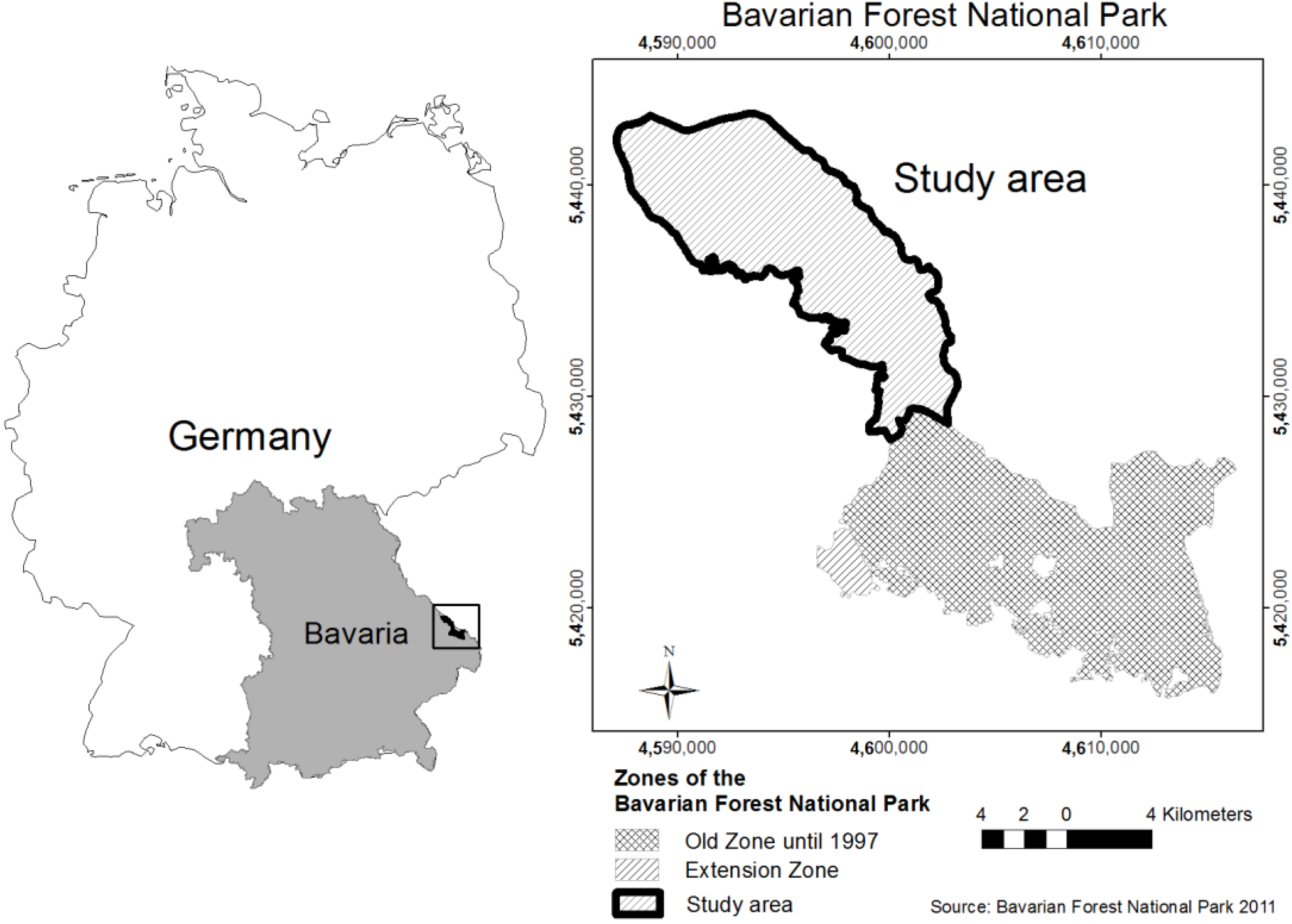
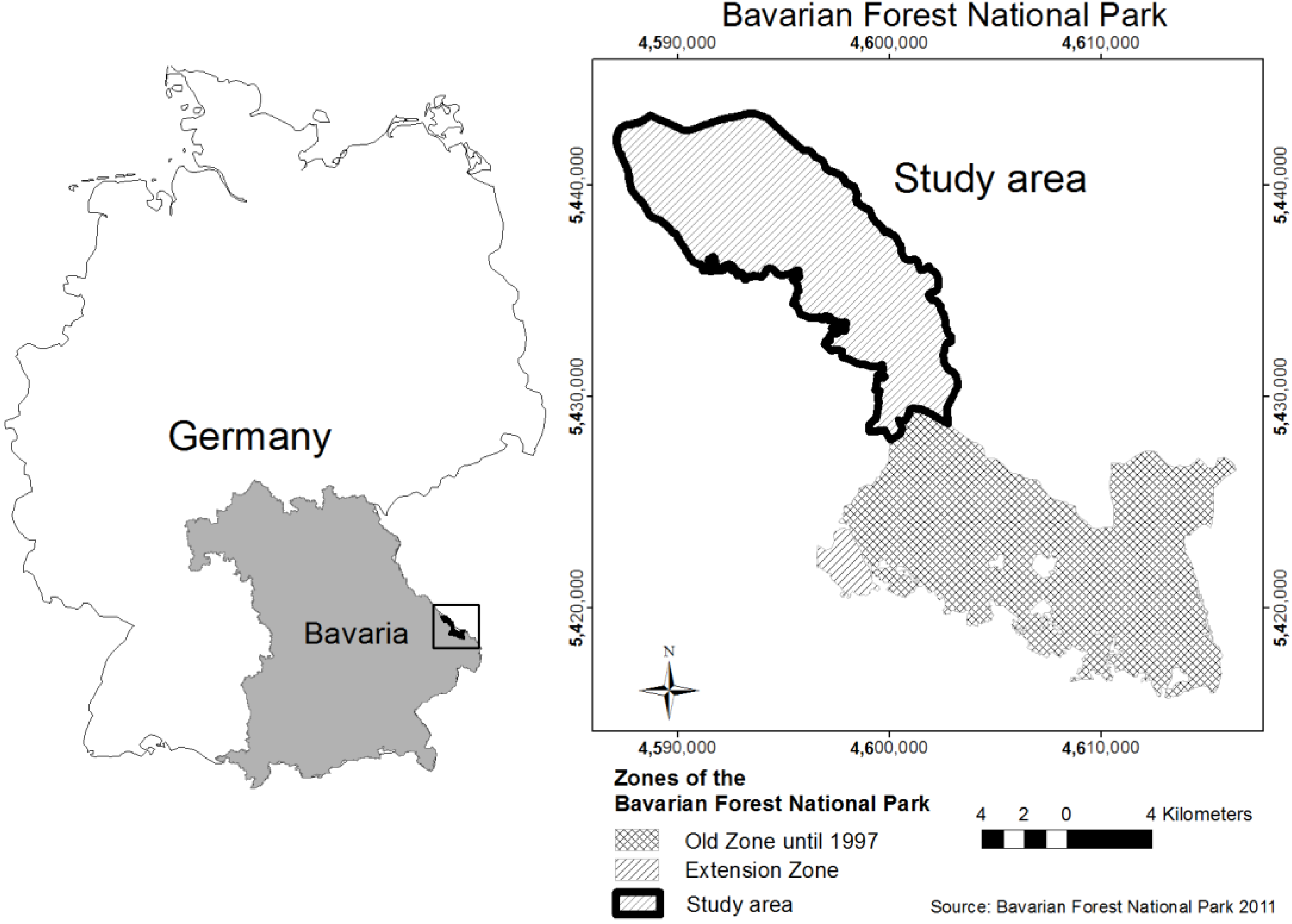
2.1. Study Area
2.2. Data Sets
2.2.1. RapidEye Data
2.2.2. Ancillary Data
2.3. Methodology
2.3.1. Data Preprocessing and Preparation
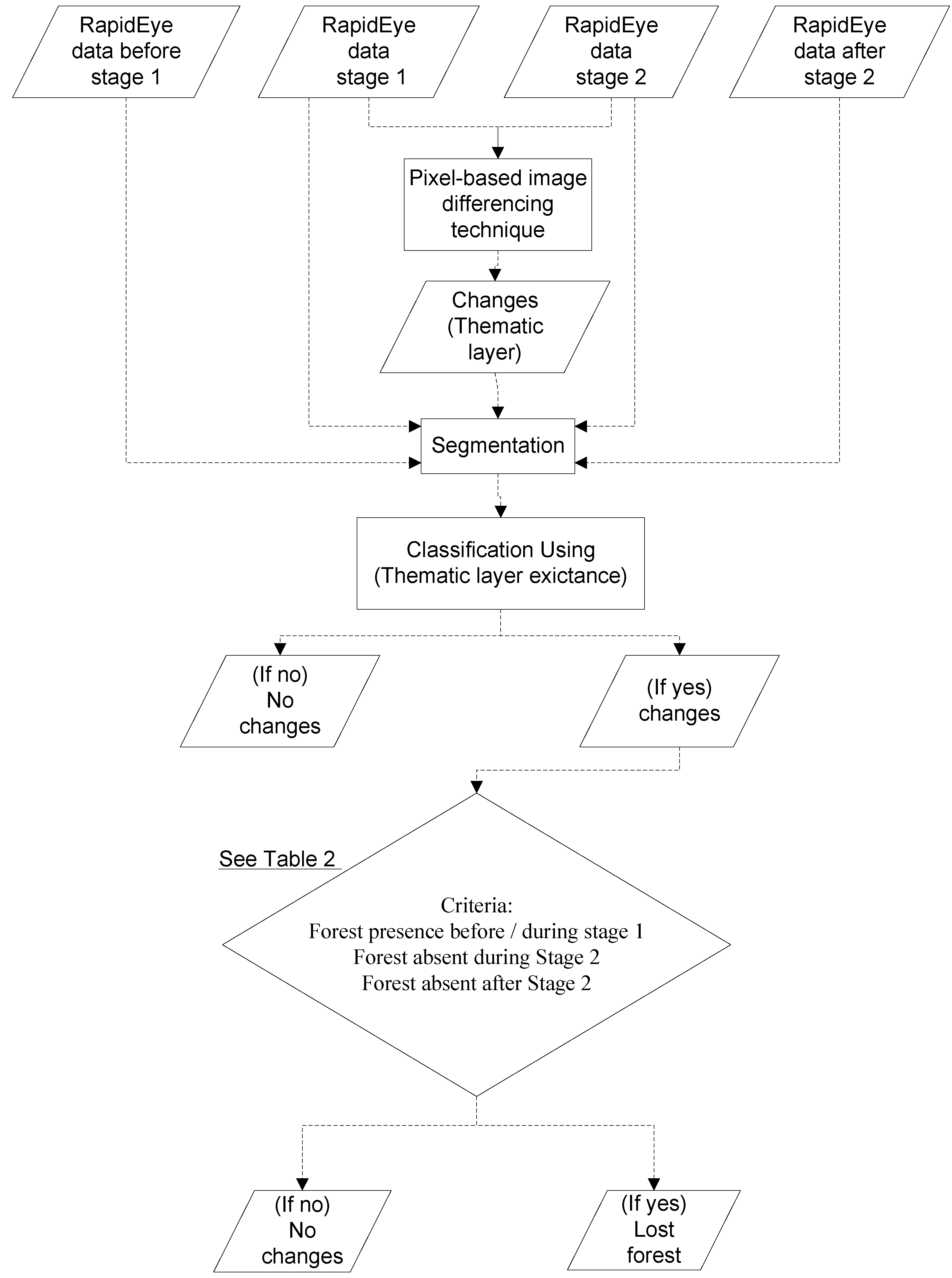
2.3.2. Detection of Forest Cover Loss

 = the pixel value for band k; i and j are the x and y coordinates of each pixel; t1 = the acquisition date of the initial state image; t2 = the acquisition date of the second state image.
= the pixel value for band k; i and j are the x and y coordinates of each pixel; t1 = the acquisition date of the initial state image; t2 = the acquisition date of the second state image.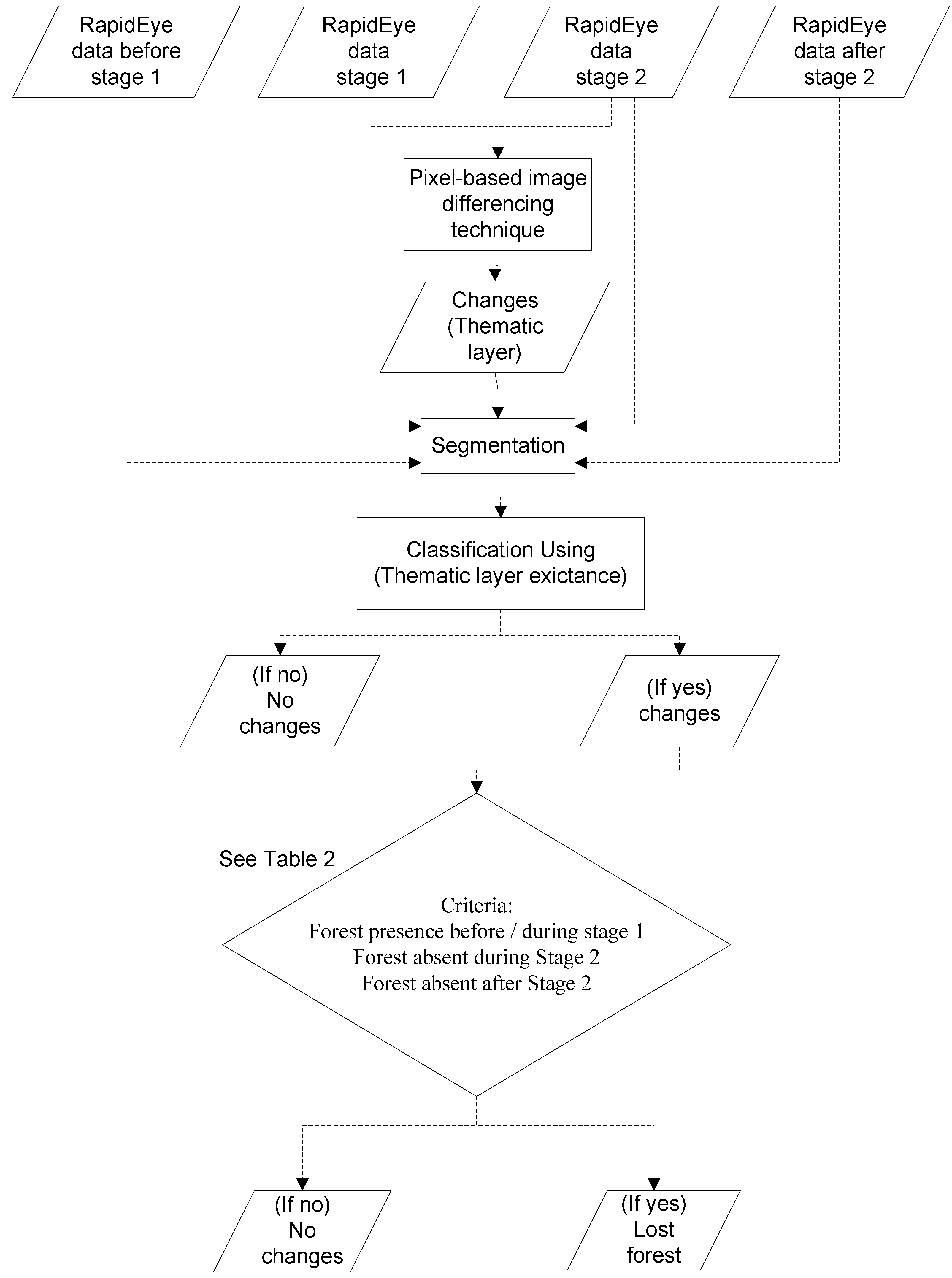
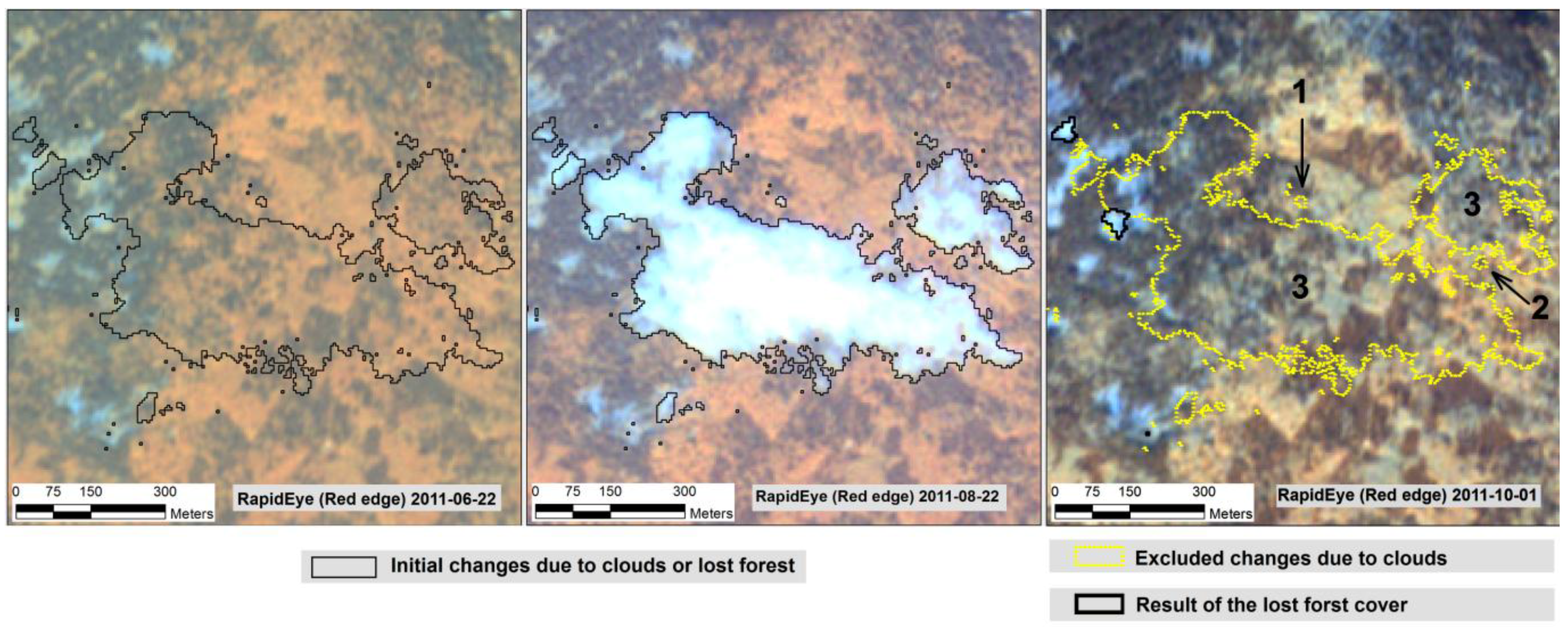
- (I)
- of forest during the first stage (first data take) or before the first stage, as derived from additional RE data from previous image takes, in case of the presence of clouds during first data take.
- (II)
- Forest absence in the second stage (second data take).
- (III)
- Forest absence after the second stage, in case of the presence of clouds during the second data take, also derived from later RE data takes.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | First Period (April–June/July) | Second Period (June/July–August) |
|---|---|---|
| Scale | 20 | 20 |
| Shape | 0.1 | 0.1 |
| Compactness | 0.9 | 0.9 |
| Bands weights | All bands from April and August, the given weight was 1 | All bands from April, August and October, the given weight was 1 |
| Criterion | First Period (April–June/July) | Second Period (June/July–August) |
|---|---|---|
| Forest present before/during stage 1 | Blue/Green ratio (April) Brightness (April) NDVI (April) | Blue/Green ratio (April) NDVI (April) |
| Forest absent during stage 2 | Blue/Green ratio (June/July) NDVI (June/July) | Blue/Green ratio (August) |
| Forest absent after stage 2 | Blue/Green ratio (August) NDVI (August) | NDVI (October) |
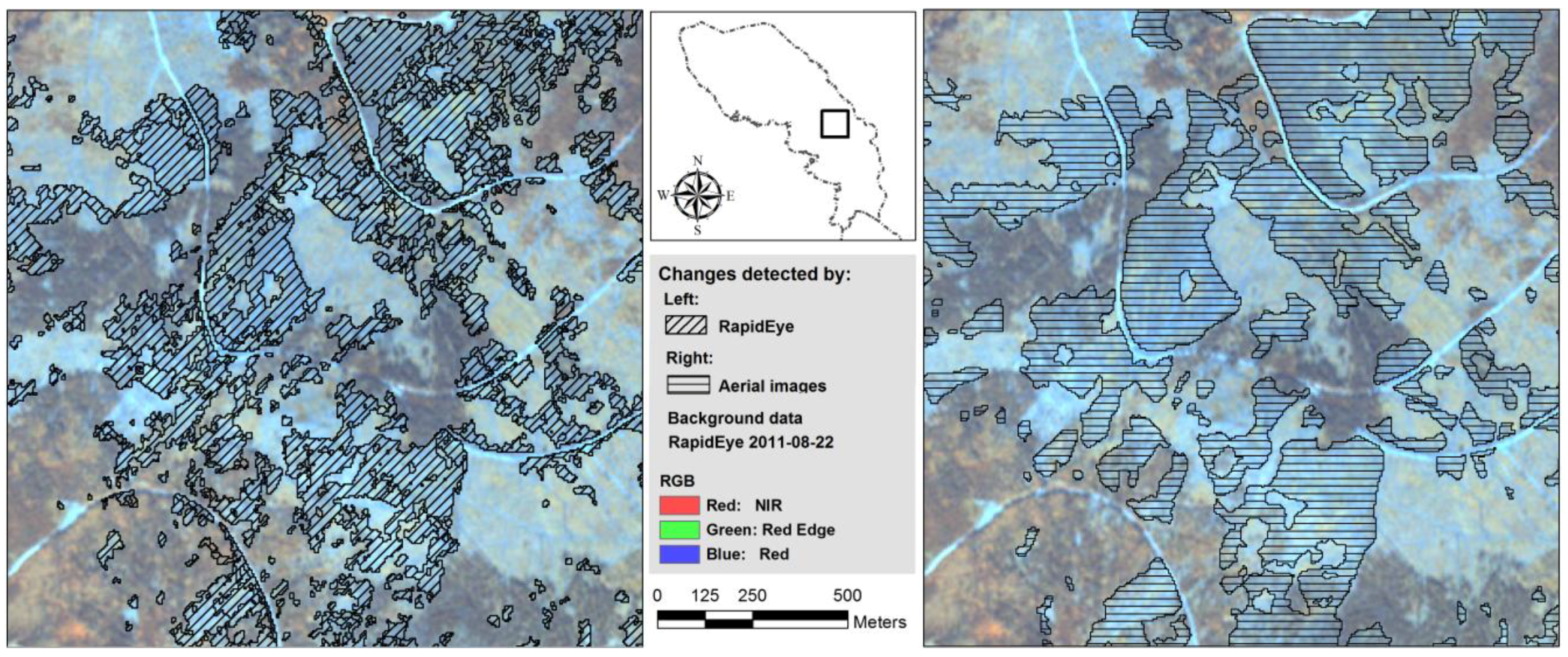
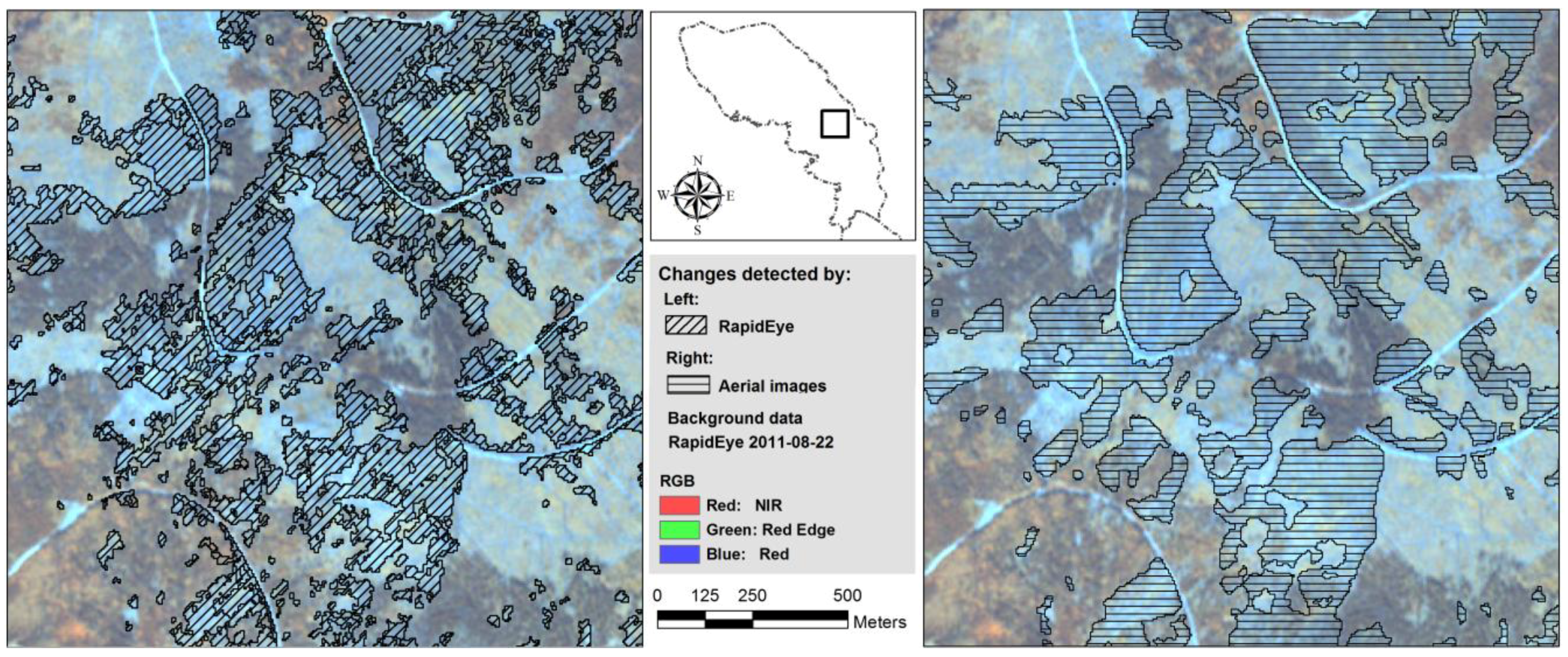
2.3.3. Accuracy Assessment and Comparison with the Aerial Images Results
2.3.4. Cost Comparison between RapidEye Data and Aerial Images
3. Results
3.1. Solving the Problem of Cloud Cover

3.2. RapidEye Analysis and Accuracy Assessment

| Reference | |||
|---|---|---|---|
| Change Detection RE | Change | No Change | User’s Accuracy % |
| change | 104 | 15 | 87.4 |
| no change | 13 | 717 | 98.2 |
| producer's accuracy % | 88.9 | 98.0 | kappa 0.86 |
| overall accuracy 96.7% | |||
3.3. Accuracy Assessment of the Aerial Images
| Reference | |||
|---|---|---|---|
| Change Detection AI | Change | No Change | User’s Accuracy % |
| change | 102 | 0 | 100.0 |
| no change | 16 | 733 | 97.9 |
| producer's accuracy % | 86.4 | 100.0 | kappa 0.92 |
| overall accuracy 98.1% | |||
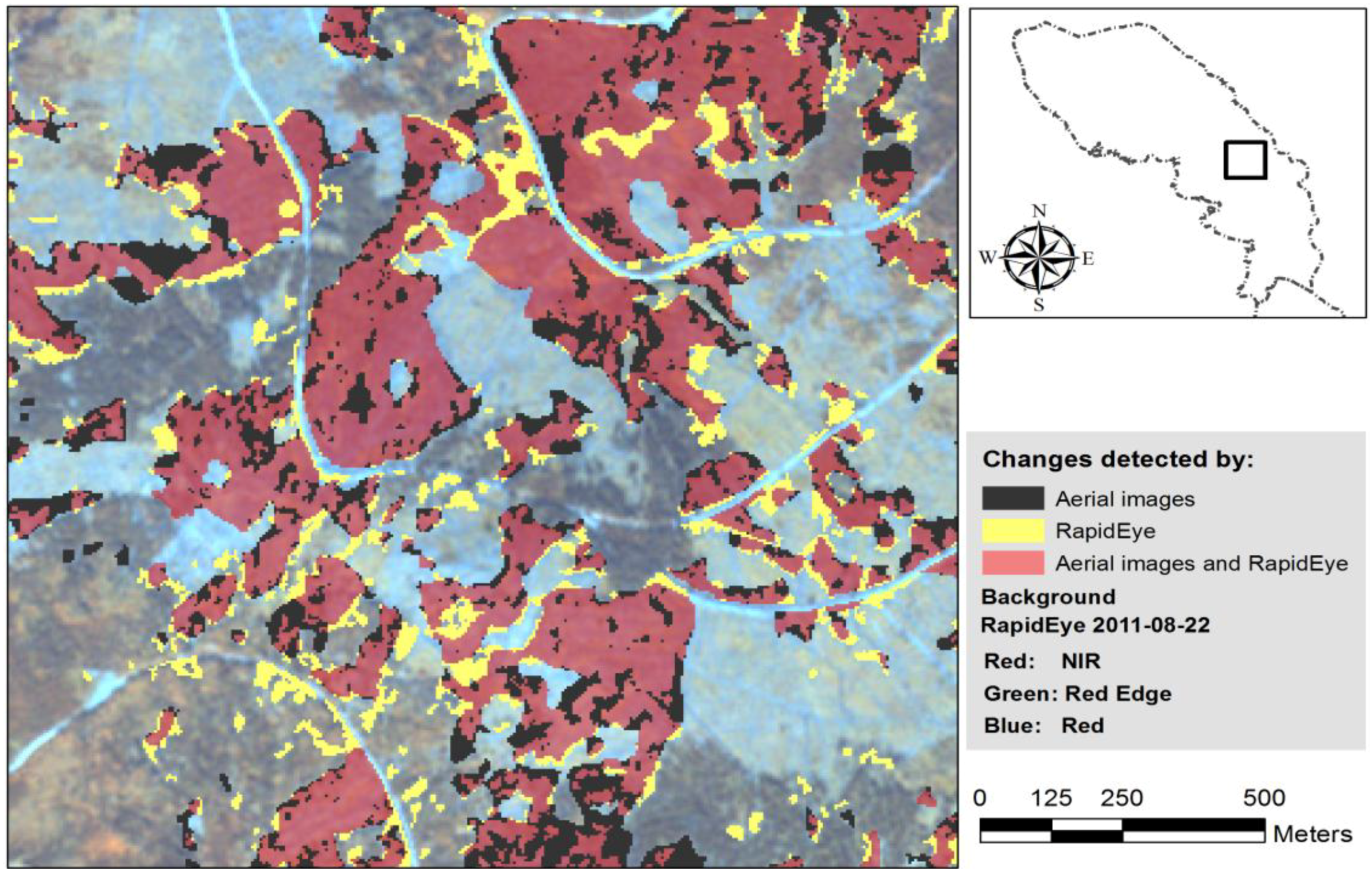
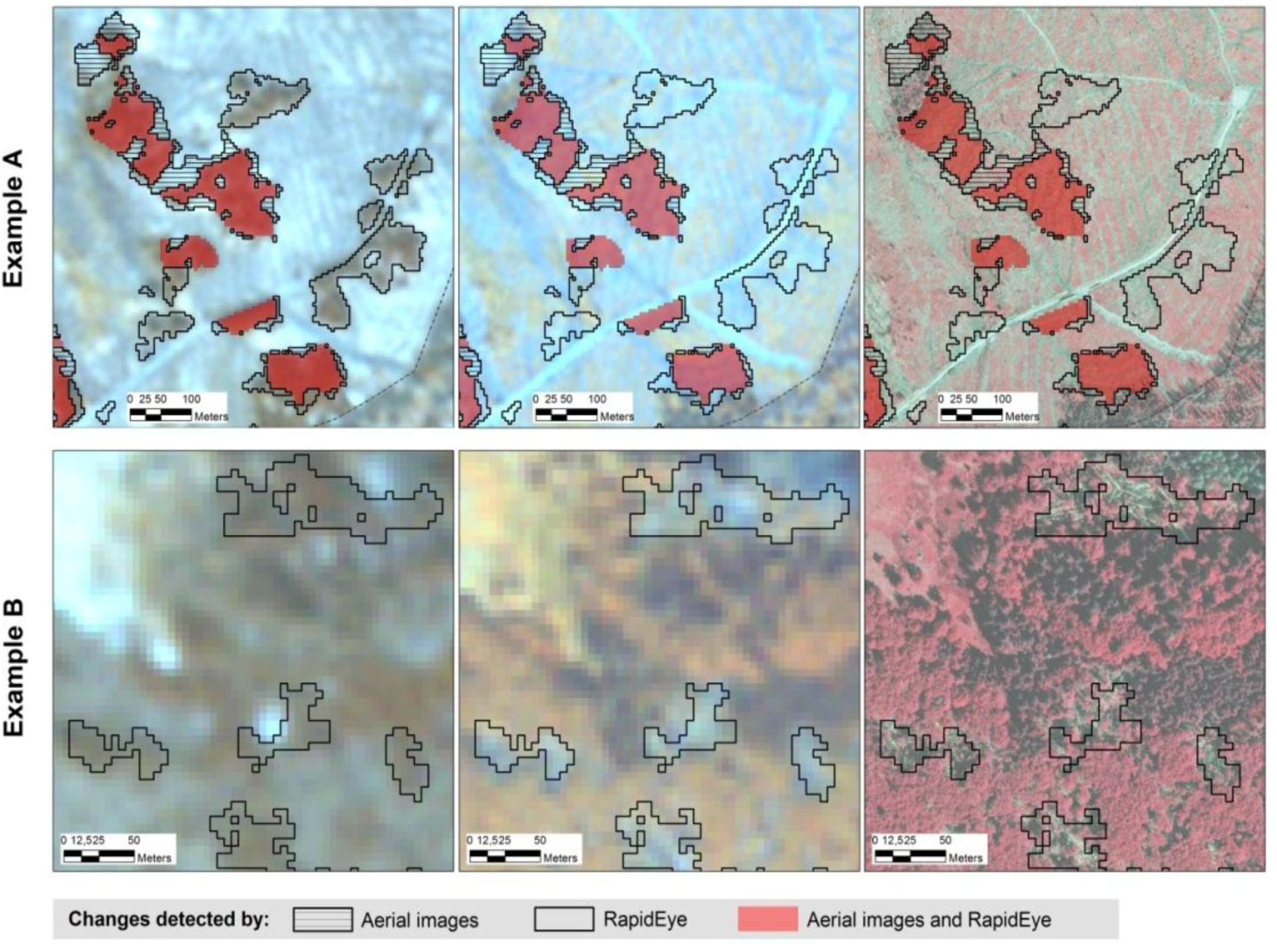
3.4. Results and Cost Comparison between RapidEye and Aerial Images
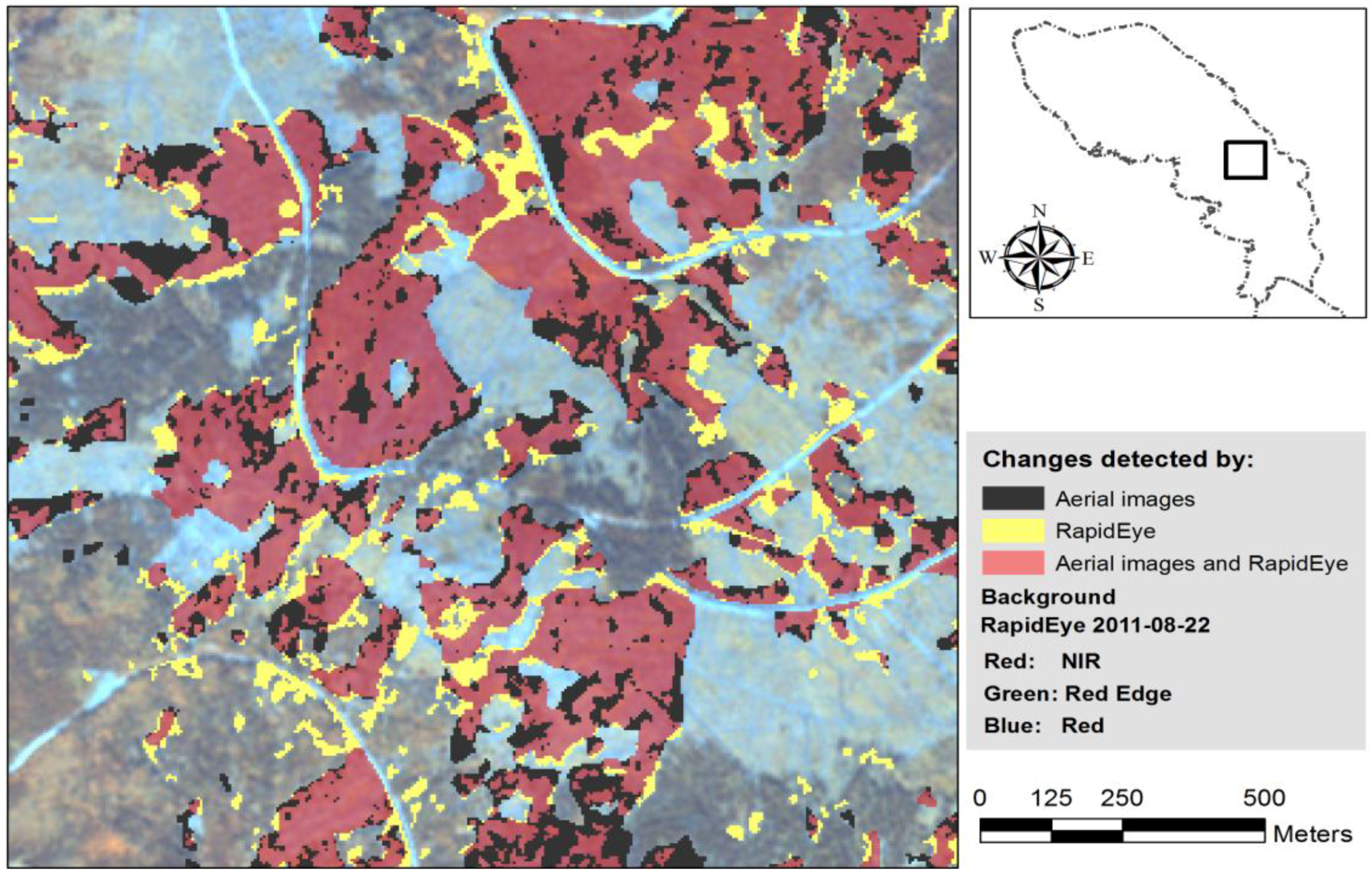
| Data Source | Total Area Detected in Hectares | Area Detected Only by a Specific Dataset in Hectares and (% of Total Area Detected Using This Method) |
|---|---|---|
| RapidEye | 392 | 31 (8%) |
| Aerial images | 373 | 12 (3%) |
| RapidEye and Aerial images | 361 |

| Category | RapidEye (Euros) | Aerial Images (Euros) |
|---|---|---|
| Raw data | (8 images × €593) = 4750 | (1000 images × €18) = 18,000 |
| Preprocessing | (10 WH × €35) = 350 | (40 WH × €35) = 1400 |
| Data analysis | (16 WH × €35) = 560 | (80 WH × €35) = 2800 |
| Total | 5660 | 22,200 |
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Fischer, A.; Lindner, M.; Abs, C.; Lasch, P. Vegetation dynamics in central European forest ecosystems (near-natural as well as managed) after storm events. Folia Geobot 2002, 37, 17–32. [Google Scholar] [CrossRef]
- Wermelinger, B. Ecology and management of the spruce bark beetle Ips typographus—A review of recent research. For. Ecol. Manag. 2004, 202, 67–82. [Google Scholar] [CrossRef]
- Eriksson, M.; Pouttu, A.; Roininen, H. The influence of windthrow area and timber characteristics on colonization of wind-felled spruces by Ips typographus (L.). For. Ecol. Manag. 2005, 216, 105–116. [Google Scholar] [CrossRef]
- Heurich, M.; Ochs, T.; Andresen, T.; Schneider, T. Object-orientated image analysis for the semi-automatic detection of dead trees following a spruce bark beetle (Ips typographus) outbreak. Eur. J. For. Res. 2010, 129, 313–324. [Google Scholar] [CrossRef]
- Kautz, M.; Dworschak, K.; Gruppe, A.; Schopf, R. Quantifying spatio-temporal dispersion of bark beetle infestations in epidemic and non-epidemic conditions. For. Ecol. Manag. 2011, 262, 598–608. [Google Scholar] [CrossRef]
- Nagendra, H.; Lucas, R.; Honrado, J.P.; Jongman, R.H.G.; Tarantino, C.; Adamo, M.; Mairota, P. Remote sensing for conservation monitoring: Assessing protected areas, habitat extent, habitat condition, species diversity, and threats. Biodivers. Monit. 2013, 33, 45–59. [Google Scholar]
- Schneider, T.; Elatawneh, A.; Rahlf, J.; Kindu, M.; Rappl, A.; Thiele, A.; Boldt, M.; Hinz, S. Parameter Determination by RapidEye and TerraSAR-X Data: A Step Toward a Remote Sensing Based Inventory, Monitoring and Fast Reaction System on Forest Enterprise Level. In Lecture Notes in Geoinformation and Cartography; Krisp, J.M., Meng, L., Pail, R., Stilla, U., Eds.; Springer Berlin Heidelberg: Berlin, Heidelberg, Germany, 2013; pp. 81–107. [Google Scholar]
- De Kok, R.; Schneider, T.; Baatz, M.; Ammer, U. Object Based Image Analysis of High Resolution Data in the Alpine Forest Area. In Presented at Joint Workshop for ISPRS WG I/1, I/3 AND IV/4, Sensors and Mappinhg from Space, Hanover, Germany, 27 September 1999; pp. 27–30.
- RapidEye, A.G. Satellite Imagery Product Specifications, 2012. Available online: http://www.rapideye.com/upload/RE_Product_Specifications_ENG.pdf (accessed on 13 March 2013).
- Rappl, A.; Elatawneh, A.; Thiele, A.; Troycke, A.; Schneider, T.; Knoke, T.; Hinz, S. Einsatz der Fernerkundungssysteme TerraSAR-X und RapidEye im Katastrophenmanagement von Windwurfereignissen. In Informationstechnologie für eine nachhaltige Landbewirtschaftung, Fokus Forstwirtschaft, Referate der 32, GIL-Jahrestagung, Freising, Germany, 29 February–1 March 2012; Clasen, M., Ed.; Ges. für Informatik: Bonn, Germany, 2012; Volume 194, pp. 235–238. [Google Scholar]
- Thiele, A.; Boldt, M.; Hinz, S. Automated Detection of Storm Damage in Forest Areas by Analyzing TerraSAR-X Data. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 1672–1675.
- Brunner: Sturmwürfe im Nationalpark Rasch Aufarbeiten 2012. Available online: http://www.forstpraxis.de/brunner-sturmwuerfe-nationalpark-rasch-aufarbeiten (accessed on 3 February 2012).
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Chen, G.; Hay, G.J.; Carvalho, L.M.T.; Wulder, M.A. Object-based change detection. Int. J. Remote Sens. 2012, 33, 4434–4457. [Google Scholar] [CrossRef]
- Willhauck, G.; Schneider, T.; De Kok, R.; Ammer, S. Comparison of Object Oriented Classification Techniques and Standard Image Analysis for the Use of Change Detection between SPOT Multispectral Satellite Images and Aerial Photos. In Proceedings of the XIX ISPRS Congress, Amsterdam, The Netherlands, 16–23 July 2000.
- Desclée, B.; Bogaert, P.; Defourny, P. Forest change detection by statistical object-based method. Remote Sens. Environ. 2006, 102, 1–11. [Google Scholar]
- Duveiller, G.; Defourny, P.; Desclée, B.; Mayaux, P. Deforestation in Central Africa: Estimates at regional, national and landscape levels by advanced processing of systematically-distributed Landsat extracts. Earth Obs. Terr. Biodivers. Ecosyst. Spec. Issue 2008, 112, 1969–1981. [Google Scholar]
- Carvalho, L.M.T.; Fonseca, L.M.G.; Murtagh, F.; Clevers, J.G.P.W. Digital change detection with the aid of multiresolution wavelet analysis. Int. J. Remote Sens. 2001, 22, 3871–3876. [Google Scholar] [CrossRef]
- McDermid, G.J.; Pape, A.; Chubey, M.; Franklin, S. Object Oriented Analysis for Change Detection. In Proceedings of the 25th Canadian Symposium on Remote Sensing, Montréal, Canada, 14–17 October 2003.
- McDermid, G.J.; Linke, J.; Pape, A.D.; Laskin, D.N.; McLane, A.J.; Franklin, S.E. Object-based approaches to change analysis and thematic map update: Challenges and limitations. Can. J. Remote Sens. 2008, 34, 462–466. [Google Scholar] [CrossRef]
- Wulder, M.A.; White, J.C.; Coops, N.C.; Butson, C.R. Multi-temporal analysis of high spatial resolution imagery for disturbance monitoring. Remote Sens. Environ. 2008, 112, 2729–2740. [Google Scholar] [CrossRef]
- Heurich, M.; Neufanger, M. Die Wälder des Nationalparks Bayerischer Wald: Ergebnisse der Waldinventur 2002/2003 im geschichtlichen und waldökologischen Kontext; Nationalparkverwaltung Bayerischer Wald: Grafenau, Germany, 2005. [Google Scholar]
- Escherich, K. Die Forstinsekten Mitteleuropas ein Lehr-und Handbuch Band 2 Spezielle Teil Abt. In 1 Die Urinsekten, die Geradflügler, die Netzflügler und die Käfer. Systematik, Biologie, forstliches Verhalten und Bekämpfung; P. Parey: Berlin, Germany, 1923. [Google Scholar]
- Heurich, M. Waldentwicklung im Bergwald nach Windwurf und Borkenkäferbefall; Nationalparkverwaltung Bayerischer Wald: Grafenau, Germany, 2001. [Google Scholar]
- Rall, H.; Martin, K. Luftbildauswertung zur Waldentwicklung im Nationalpark Bayerischer Wald 2001; Nationalparkverwaltung Bayerischer Wald: Grafenau, Germany, 2002. [Google Scholar]
- Walter, V. Object-based classification of remote sensing data for change detection. ISPRS J. Photogramm. Remote Sens. 2004, 58, 225–238. [Google Scholar] [CrossRef]
- Singh, A. Review article digital change detection techniques using remotely-sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar]
- Elatawneh, A.; Rappl, A.; Schneider, T.; knoke, T. A semi-automated method of forest cover losses detection using RapidEye images: A case study in the Bavarian forest National Park. In Presented at Vom Algorithmus zum Produkt: Tagungsband zum 4, RESA-Workshop, Neustrelitz, Germany, 21–22 March 2012; Borg, E., Ed.; GITO, Verl. für Industrielle Informationstechnik und Organisation: Berlin, Germany, 2012; pp. 183–200. [Google Scholar]
- Huang, C.; Song, K.; Kim, S.; Townshend, J.R.G.; Davis, P.; Masek, J.G.; Goward, S.N. Use of a dark object concept and support vector machines to automate forest cover change analysis. Remote Sens. Environ. 2008, 112, 970–985. [Google Scholar]
- Biging, G.; Colby, D.; Congalton, R. Sampling Systems for Change Detection Accuracy Assessment. In Remote Sensing Change Detection: Environmental Monitoring Methods and Applications; Lunetta, R.S.E.C., Ed.; Ann Arbor Press: Chelsea, UK, 1998. [Google Scholar]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC/Lewis Publications: Boca Raton, FL, USA, 1999. [Google Scholar]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Elatawneh, A.; Wallner, A.; Manakos, I.; Schneider, T.; Knoke, T. Forest Cover Database Updates Using Multi-Seasonal RapidEye Data—Storm Event Assessment in the Bavarian Forest National Park. Forests 2014, 5, 1284-1303. https://doi.org/10.3390/f5061284
Elatawneh A, Wallner A, Manakos I, Schneider T, Knoke T. Forest Cover Database Updates Using Multi-Seasonal RapidEye Data—Storm Event Assessment in the Bavarian Forest National Park. Forests. 2014; 5(6):1284-1303. https://doi.org/10.3390/f5061284
Chicago/Turabian StyleElatawneh, Alata, Adelheid Wallner, Ioannis Manakos, Thomas Schneider, and Thomas Knoke. 2014. "Forest Cover Database Updates Using Multi-Seasonal RapidEye Data—Storm Event Assessment in the Bavarian Forest National Park" Forests 5, no. 6: 1284-1303. https://doi.org/10.3390/f5061284
APA StyleElatawneh, A., Wallner, A., Manakos, I., Schneider, T., & Knoke, T. (2014). Forest Cover Database Updates Using Multi-Seasonal RapidEye Data—Storm Event Assessment in the Bavarian Forest National Park. Forests, 5(6), 1284-1303. https://doi.org/10.3390/f5061284