1. Introduction
Global climate change and severe environmental pollution have become important issues. Currently, electric vehicles (EV), as a kind of low-carbon and environmentally friendly mode of transport, have become a research focus [
1,
2] of concern to many national governments, vehicle manufacturers, and energy enterprises. With large-scale popularisation of EVs, charging stations (CS) constructed on highways will provide favourable conditions for long-distance driving of EVs [
3,
4]. Limitations in charging time for EVs, which can affect the convenience of EV charging, are mainly caused by the constraints of the power level of charging facilities [
5] and acceptable charging profile of EV batteries [
6,
7]. With the rapid development of quick-charging technology [
8,
9], as well as the rapid development of EV battery technology [
10,
11,
12], substantial reductions in charging time have great significance for improving the operational efficiency of CSs and charging convenience of EVs. Under the current fast-charging technology, EV charging and CS operation influence each other. If some guiding measures are taken, they can effectively adjust interactions between EVs and CSs [
13,
14,
15,
16,
17]. Beyond this, however, the parallel output characteristics and charging strategy of charging facilities can also affect the EV charging and CS operation. Particularly, in the process of quick-charging for multiple types of EVs on highways where vehicle inflow is excessive, there are some problems with conventional quick-charging strategies (CQCS) in terms of the parallel output characteristics and charging strategy of charging facilities for EVs at a CS, which is an in-station issue.
At first, there is difference between battery capacities of multiple types of EVs driving on highways. Therefore, the characteristic curves of corresponding battery quick-charging also differ. Generally, the conventional quick CS takes the maximum quick-charging power of high-capacity battery as the power limit on its charging piles. In addition, conventional quick CS is usually equipped with a number of the same type of quick-charging piles (every quick-charging pile only has one power output interface, permitting it to provide a charging service for only one EV at a time) to improve sharing utilisation rate of charging infrastructure. However, low vehicle inflow, difference of multiple types of battery capacities and the variable power charging phase of battery [
6,
7] can all reduce the utilisation rate of charging infrastructure. Secondly, EVs in CSs on highways where vehicle inflow is excessive usually have to wait to be charged, which means that EVs waiting in the queue are controllable (i.e., they have potential utility value). However, the current CQCS does not recognise nor use the potential value therein. This may cause excessive user waiting time. In addition, in the process of charging EVs in the conventional quick CS, the intensive volatility of charging loads poses a greater challenge to power supply adjustment on the power grid [
14]. Furthermore, three problems concerning resource allocation characteristics and operating mode of conventional quick CS arise: (1) the current CQCS does not fill the power coast-down of EVs in the quick-charging progress under variable power conditions, causing low utilisation rates of charging infrastructure; (2) it ignores the controllability of electric vehicles waiting in the queue, causing excessive user waiting time; and (3) it affects the power grid and poses a greater challenge to power supply adjustment on the power grid. Therefore, CQCS cannot meet the requirement of quick charging for multiple types of EVs on highways where vehicle inflow is excessive. It is thus necessary to seek out a new quick-charging strategy (NQCS) for EVs to solve these problems.
There are at present two common EV quick-charging strategies: one is the inter-station EV-guided charging strategy; the other is the in-station EV-coordinated charging strategy. The inter-station EV-guided charging strategy means that EVs can charge different CSs by using the guiding method to reduce user waiting time and improve the utilisation rate of charging infrastructure and reduce the impact on the power grid. The guided method is sub-divided into the reservation guided method [
13,
14,
15,
16] and electricity price-guided method [
17]. A reservation-guided method means that the user interacts with the platform that will then specify a CS for the user, which lays more emphasis on how to offer suitable charging options for EV users, without considering either the effect of electricity price on user choice or management of user charging process. The electricity price-guided method means that the user actively selects the CS for charging or manages the EV charging process under the guidance of current electricity prices. Current research mainly focuses on the reservation-guided method and the ordered reservation algorithm employed by service platforms to specify CSs for the users. Yang et al. [
13,
14] proposed a CS reservation strategy for urban areas where quick CSs are highly concentrated. By using the optimal reservation algorithm, an ideal CS is allocated to the vehicle with a reservation, improving the utilisation rate of charging infrastructure and reducing user waiting time; however, the optimal reservation algorithm is executed at the price of selection of the user’s driving ability (which can be reflected by the remaining range of the EV before charging the battery) by multiple CSs, which means that unfairness may exist. Yan et al. [
15] proposed an optimal path recommendation strategy for urban EVs and made a comparison with the shortest path strategy to verify the effectiveness of the optimal path recommendation strategy. However, this also comes down to the issue of selection of CSs for EVs. Yang et al. [
16] proposed a CS recommendation strategy for EVs on highways. It adopted a global algorithm to allocate the optimal CS to EVs, which effectively reduced user waiting time. Chen et al. [
17] conducted an in-depth analysis of characteristics of charging demand of EVs on highways and operating demand of CSs. To avoid unfairness of CS selection, it proposed a CS selection strategy guided by state-based electricity prices. It adopted state-based prices to incentivise the user to charge his/her vehicle in advance, so as to increase selective power of the corresponding CS. This can improve utilisation rate of charging infrastructure, reduce the user’s charging cost and waiting time, and reduce the effects of EVs on power grid operation and highway traffic. The aforementioned literatures mainly examined the problem of CS selection in different areas (urban and highway areas) but did not study the charging process after an EV enters a quick CS.
The in-station EV-coordinating charging strategy means that EVs can charge in an orderly fashion at a CS by using the coordinating charging method to reduce user waiting time and improve the utilisation rate of charging infrastructure and reduce the impact on the power grid. The coordinating charging method is divided into an inter-EV-coordinating charging strategy [
18,
19], a coordinating charging strategy between EVs and the energy storage system [
7,
20], and a coordinating charging strategy between EVs and new energy sources [
6]. Of course, some reports cover the quick-charging process of EVs in CS. Zhao et al. [
6] gave comprehensive consideration to the characteristics of photovoltaic power generation output, peak-and-valley electricity prices, and power outage of EVs, before proposing a charging strategy integrating EVs with photovoltaic power generation output and achieving the goal of stabilising fluctuations in charging load, thereby lowering charging cost for users, and absorbing new energy as much as possible by partitioned optimisation of charging power. Sun et al. [
7] presented a control strategy for fast CS fitted with a flywheel energy storage system in a quick CS; the fluctuation of charging load can be reduced by the energy storage system with the proposed control strategy. Bodet et al. [
18] proposed an in-station EV-coordinating charging strategy. By coordinating, the charging power and service order among EVs are optimised, so as to improve the utilisation rate of electric energy of the CS and reduce user waiting time and impacts of charging load on the power grid. However, the literature offers a hypothesis that the service order of an EV can be adjusted and interferes in the charging process of the EV; however, these methods are hard to realise in practical application, hampering effective implementation of this charging strategy. Hu et al. [
19] proposed a charging power control strategy for EV quick charging, in which real-time chargeable power output by the power grid would be allocated to EVs according to some power allocation method, so as to reduce the impact of EV quick-charging on the power grid. This strategy also interferes in the EV-charging process. Ding et al. [
20] proposed a synergetic charging strategy of a quick CS and energy storage system. By controlling charging and discharging of the energy storage system and tracking quick-charging load of EV, the strategy reduces the impact of EV quick-charging on the power grid. Although these reports covered the charging process of EV quick-charging, some [
18,
19] will incur problems when they are used in quick-charging strategies for multiple types of EVs on highways. Therefore, this paper will explore another inter-EV-coordinating charging strategy for EVs at a CS, which cannot add other costs.
Generally, CSs and EVs on highways both have their own operating rules that have been agreed upon, performed, and executed by both parties. For CSs, they have to arrange charging services according to the user’s entrance order, charging needs, and instinct characteristics of the battery. For EV users, once entering the CS, the user has to accept the charging service according to his/her entrance order. If no unoccupied charging infrastructure is available, the user has to wait in the queue and is not allowed to jump that queue; in the charging process, the user’s charging need is not allowed to change and the EV is not allowed to leave the charging infrastructure; and after charging, the EV should leave the CS as soon as possible so as not to affect the charging of other EVs. As these rules are open and applied by all CSs and EV users, the EV quick-charging process is not controllable. Thus, it is hardly practical to control the EV entrance order, charging needs, and characteristics of the battery.
To solve the problem in which the CQCS cannot meet the requirement of quick charging for multiple types of EVs with different battery sizes on highways where vehicle inflow is excessive, this paper proposed a NQCS for EVs, which is an inter-EV-coordinating charging strategy at a CS: on the premise of not affecting the EVs being charged, the remaining power of the quick-charging pile with multiple power output interfaces [
21] is used to provide synchronous charging service for EVs waiting in the queue. That is why this research discovered, and made use of, the potential value of EVs waiting in the queue. Then, a solution for the analysis and verification of the NQCS is proposed, including a power distribution model for EVs while waiting, a queuing model for a CS, and an improved queuing algorithm. The major contributions of this study are as follows:
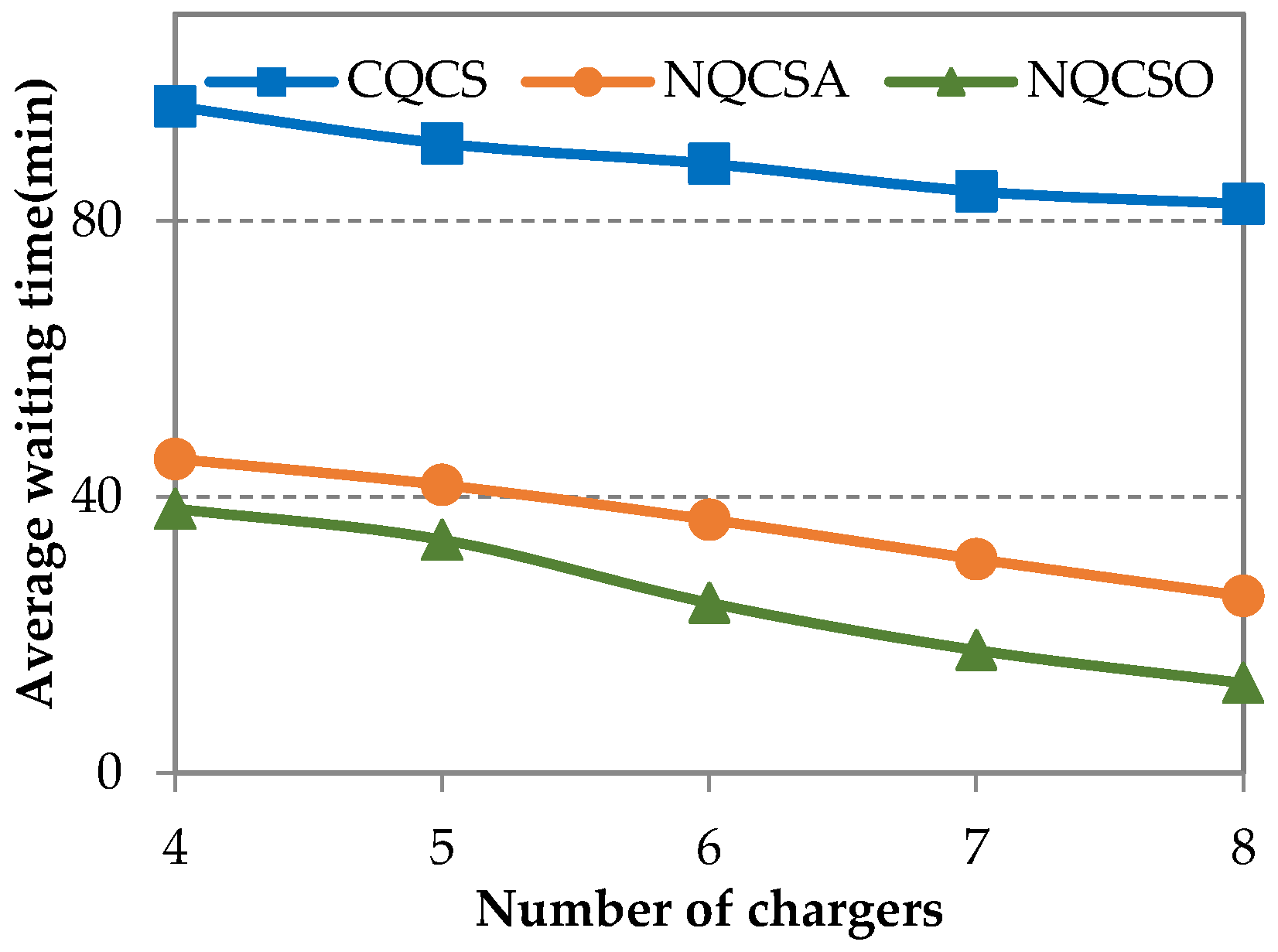
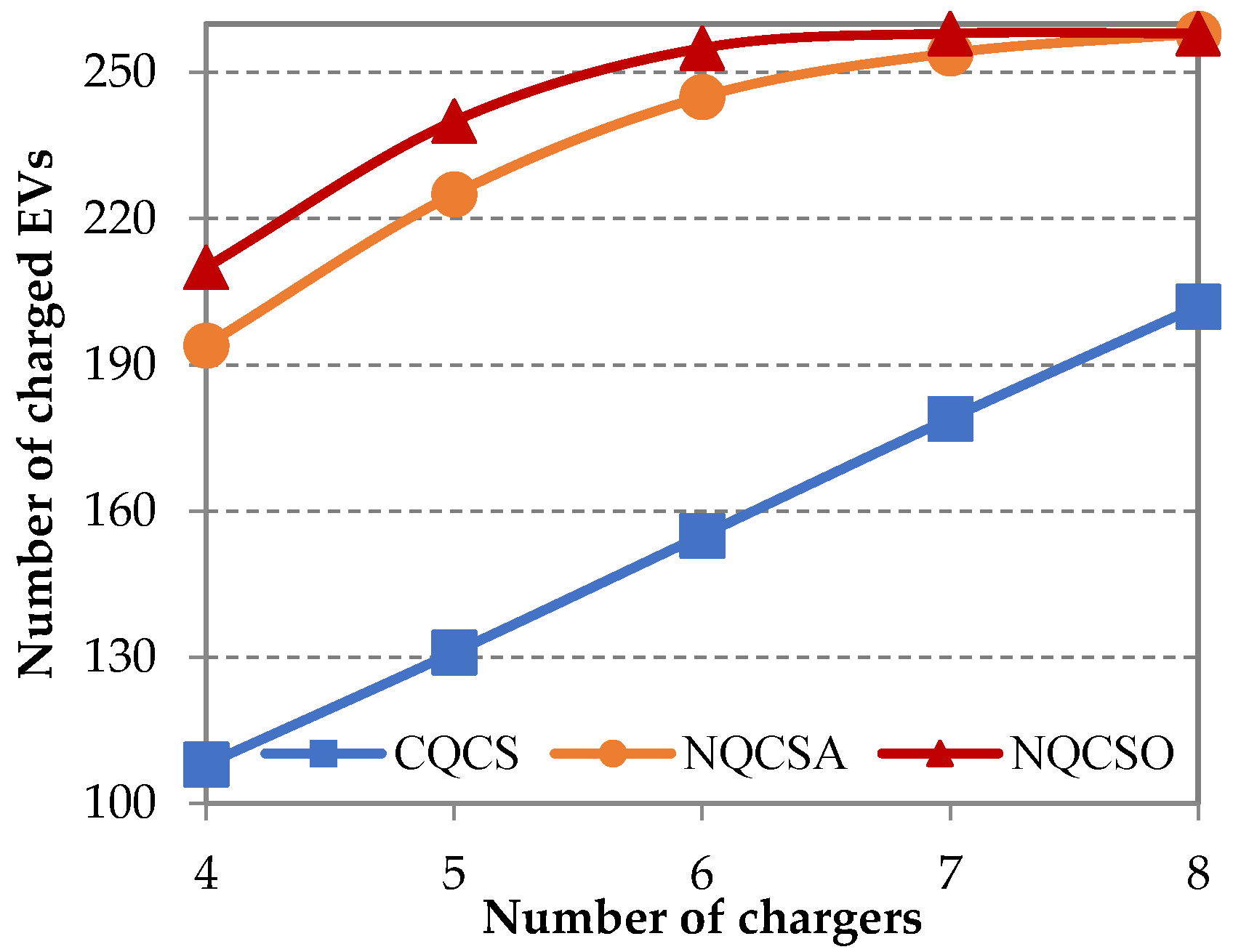
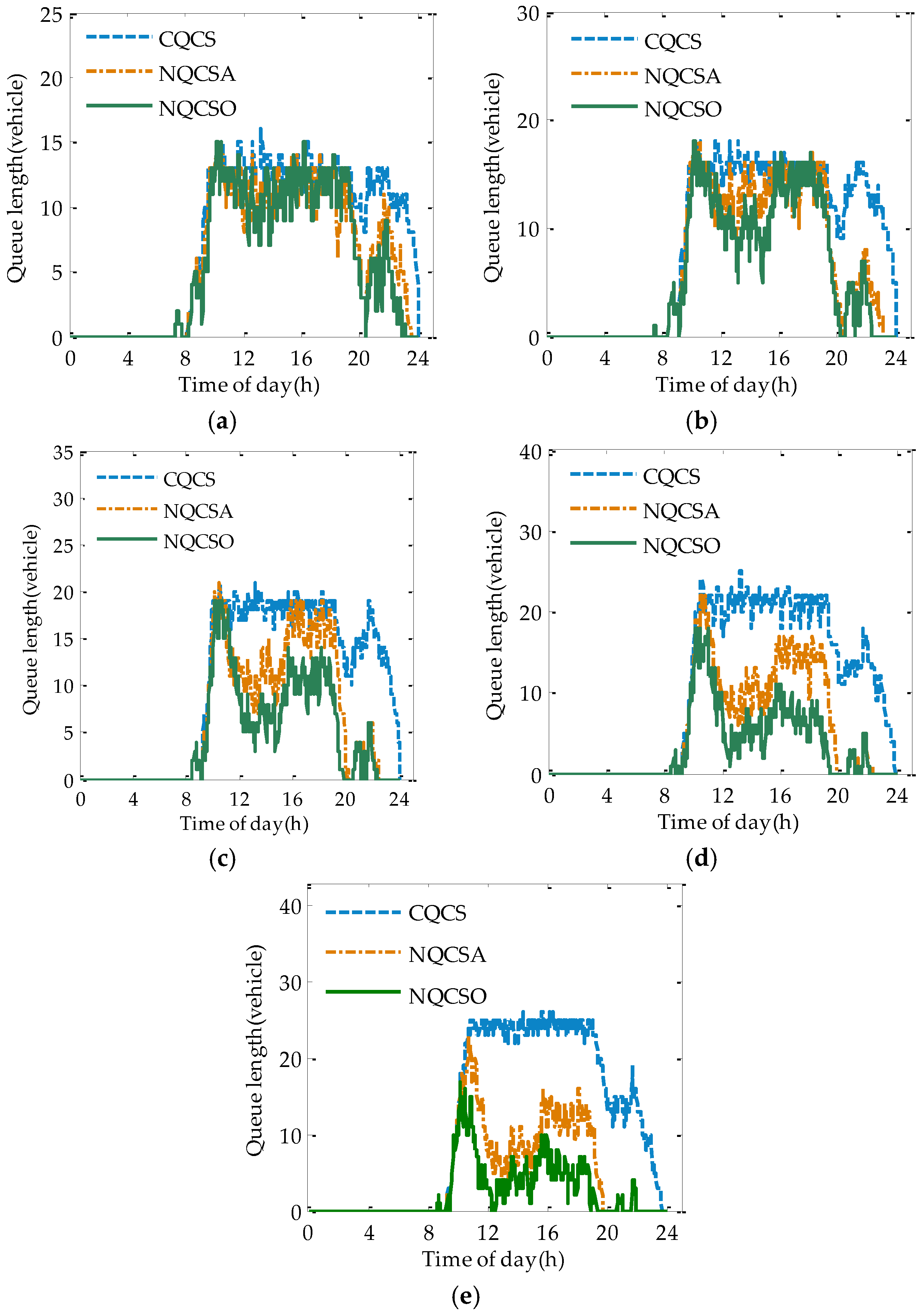
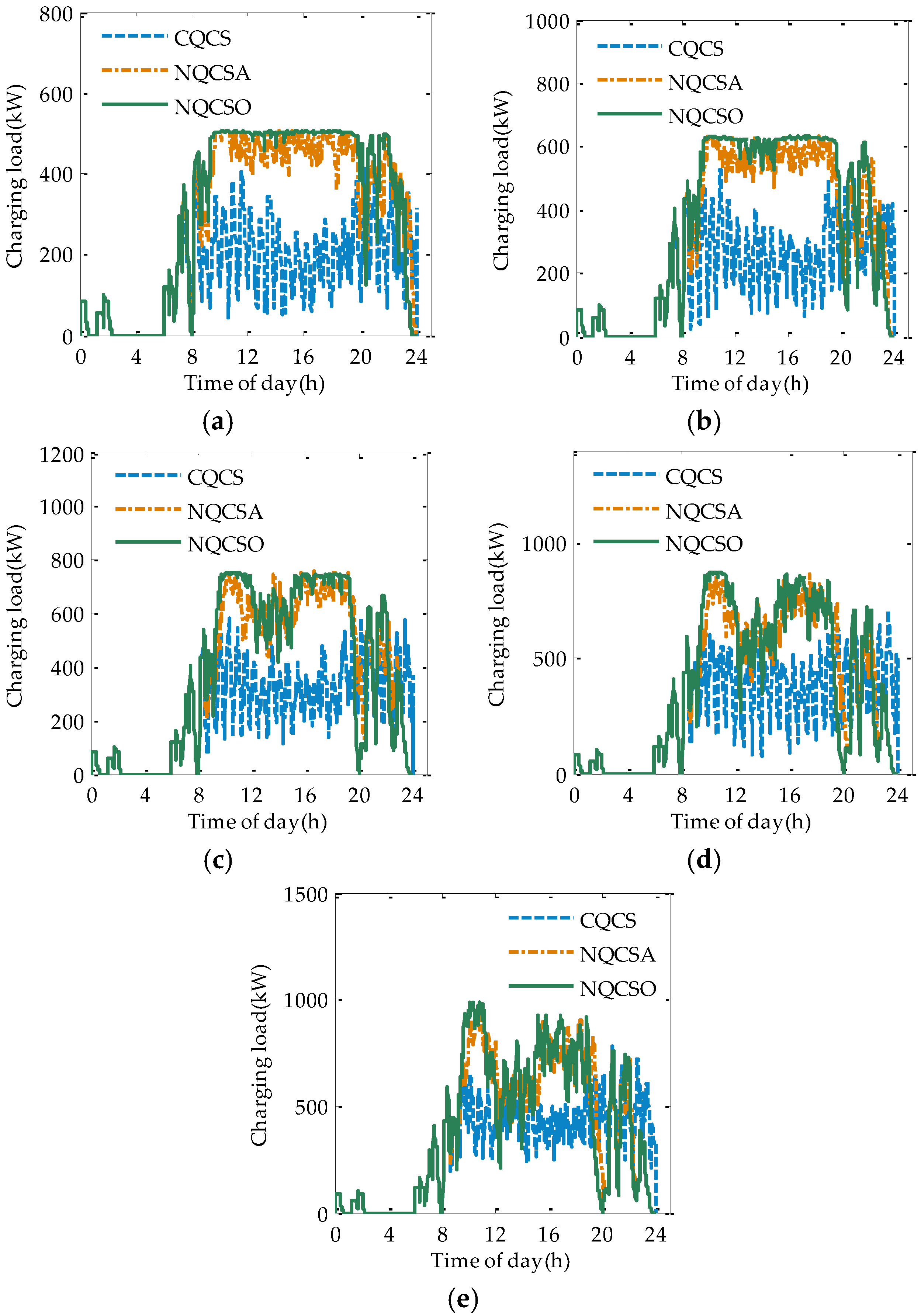
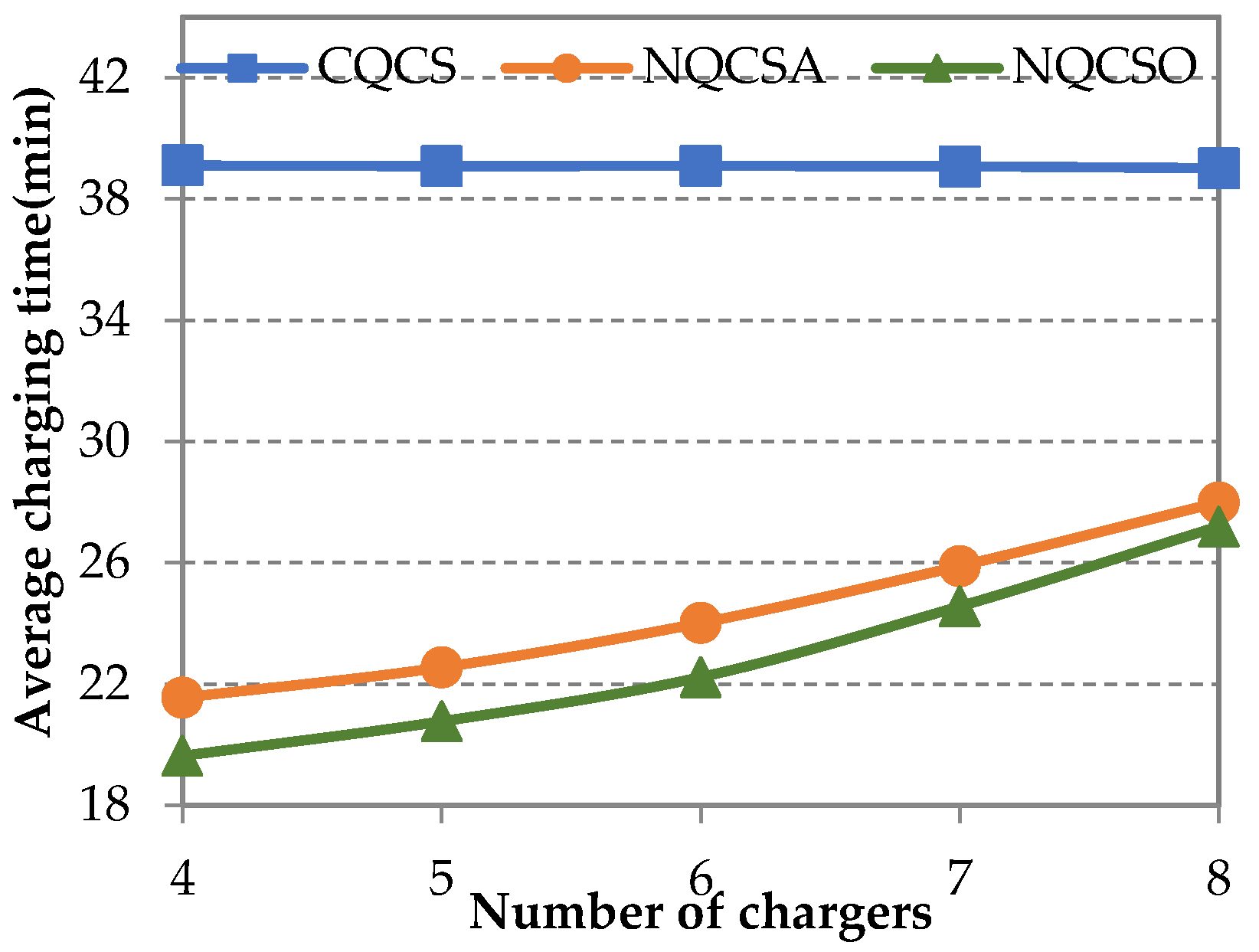
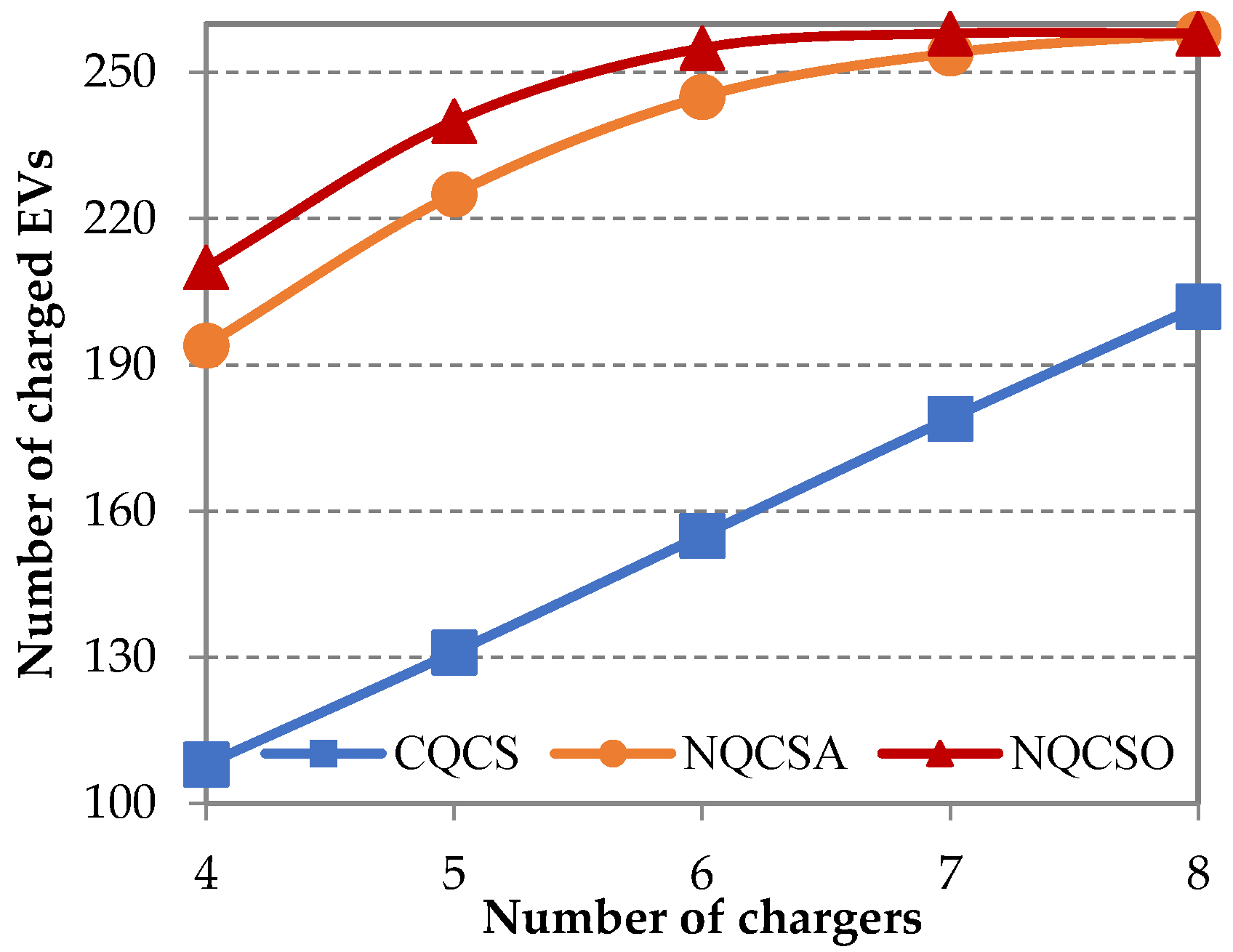
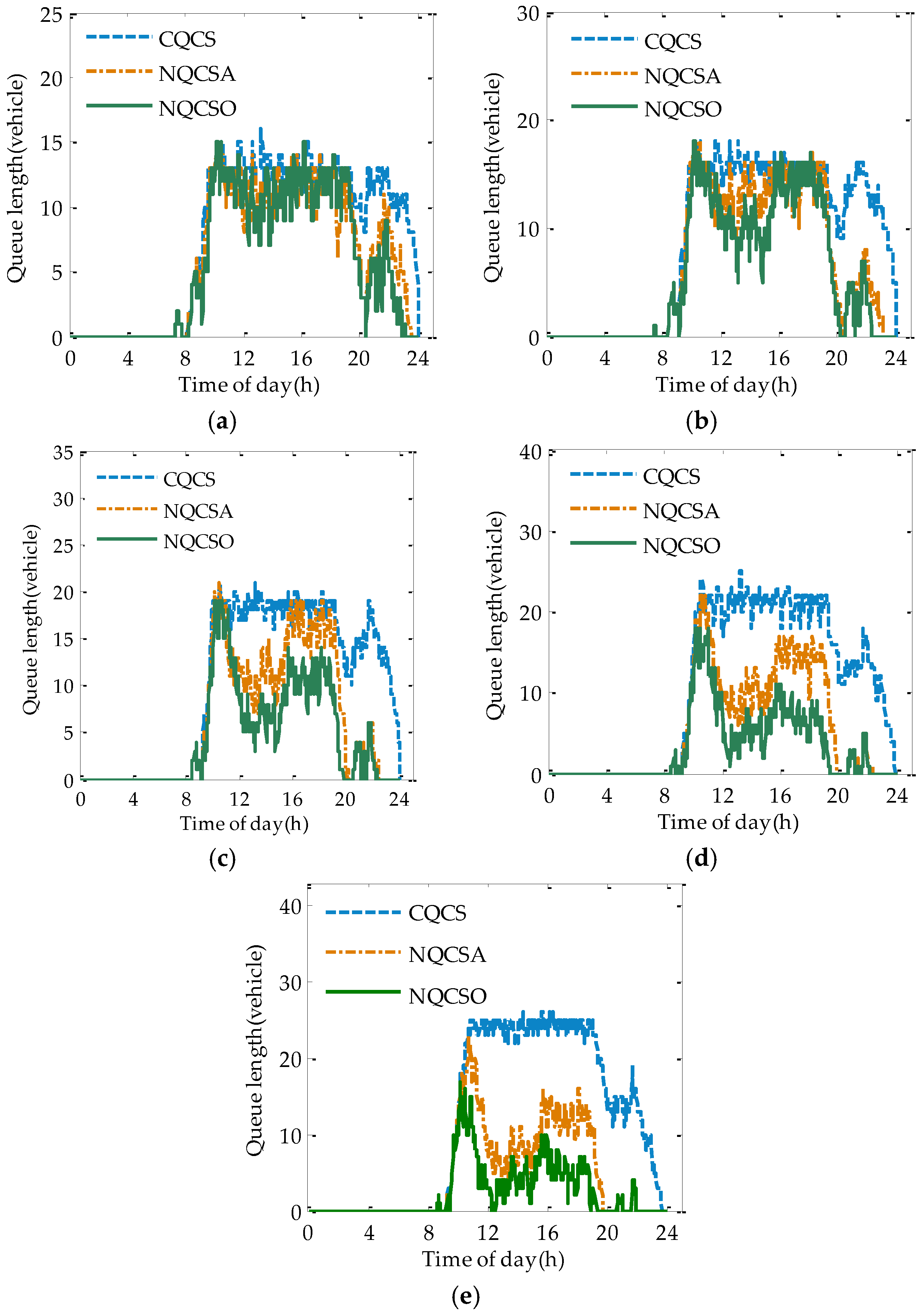
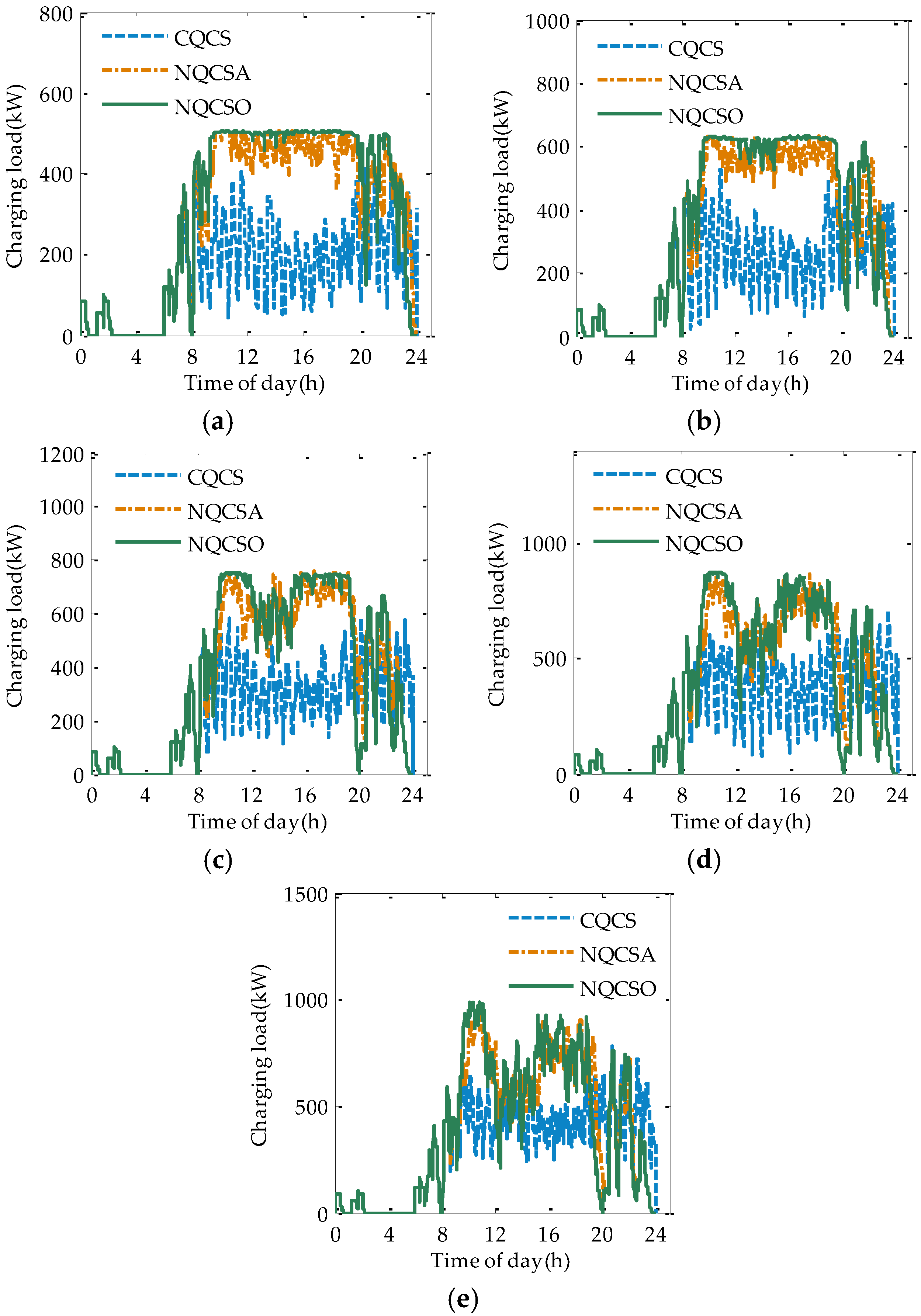
A new quick-charging strategy for multiple types of EVs with different battery sizes at a highway CS (where vehicle inflow is excessive) is proposed for the first time, which is summarised as follows: on the premise of not affecting the EVs being charged, the remaining power in the quick-charging pile with multiple power output interfaces is used to provide synchronous charging services for EVs waiting in the queue. This can reduce EV user waiting time, charging time, and dwell time, but can also improve the utilisation rate of charging infrastructure and service capacity of CS and reduce the queue length at the CS. At the same time, this can reduce the effects on the power grid.
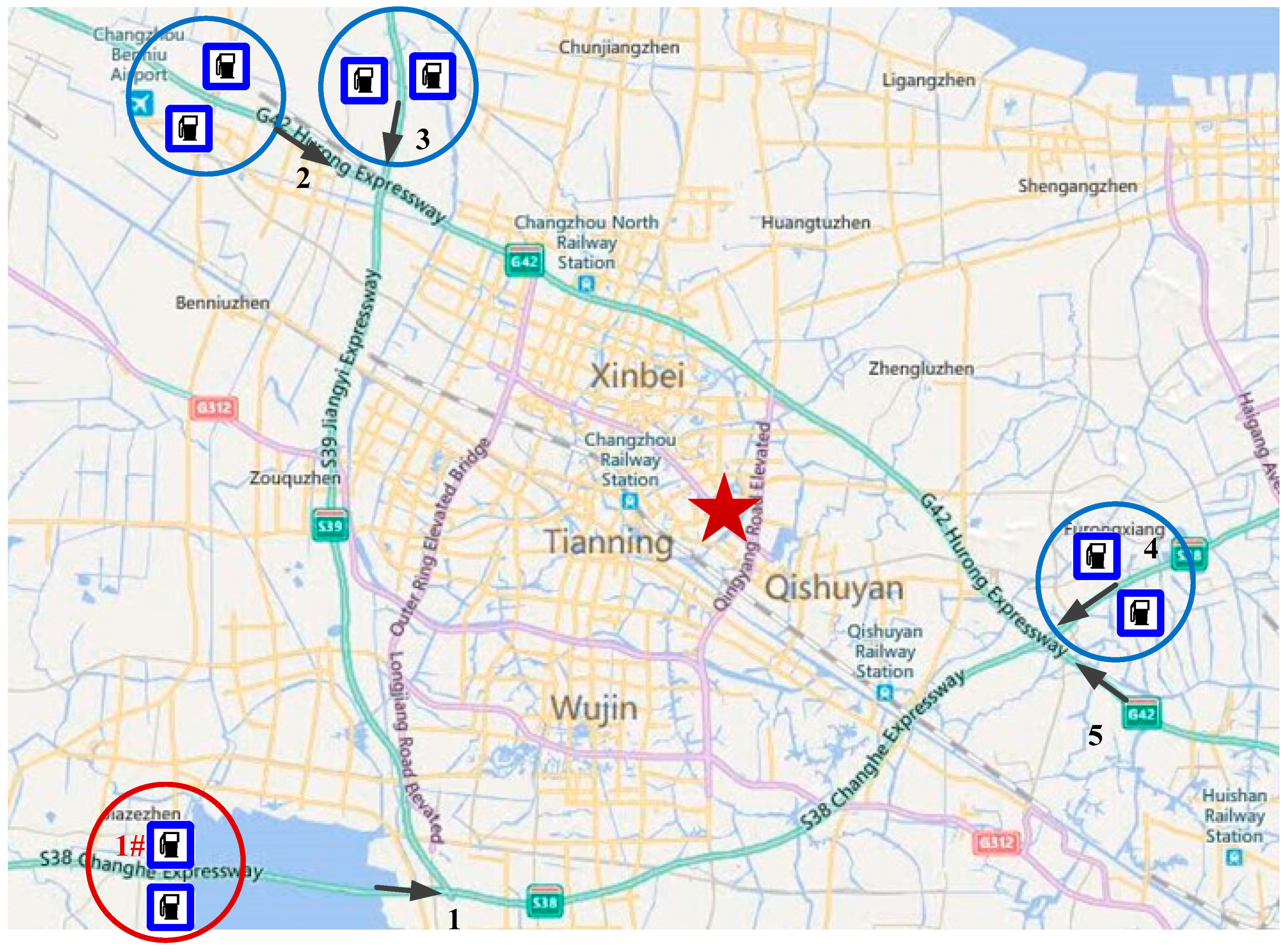
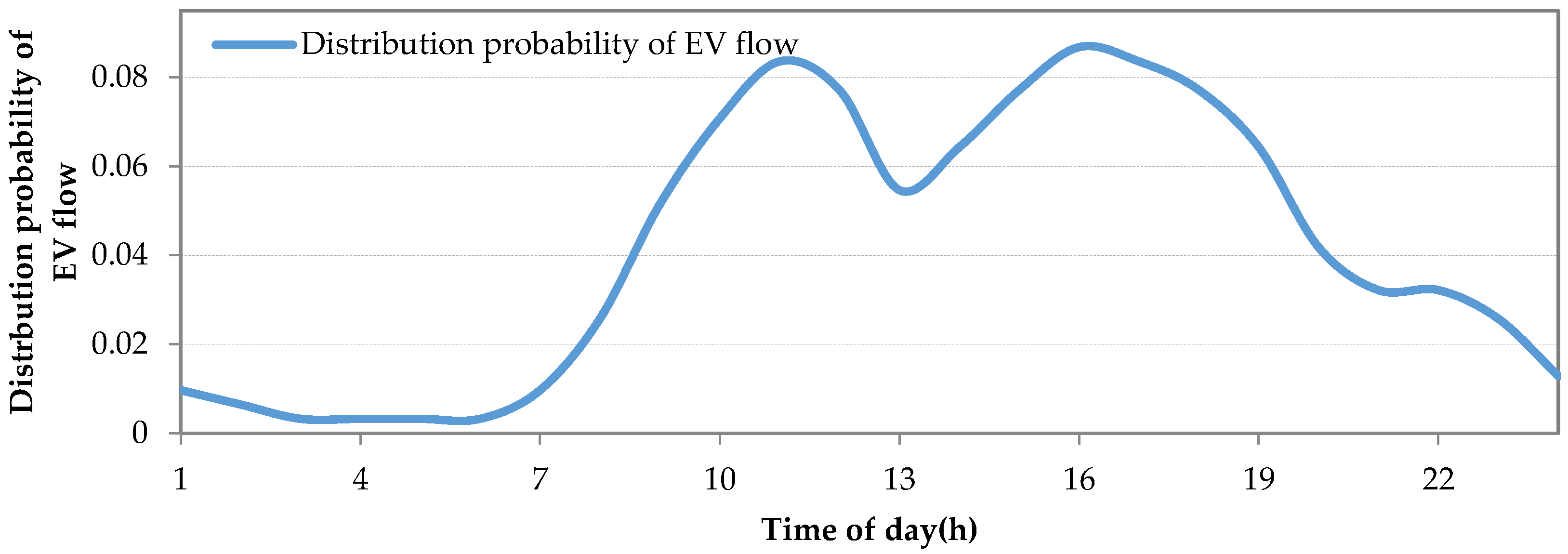
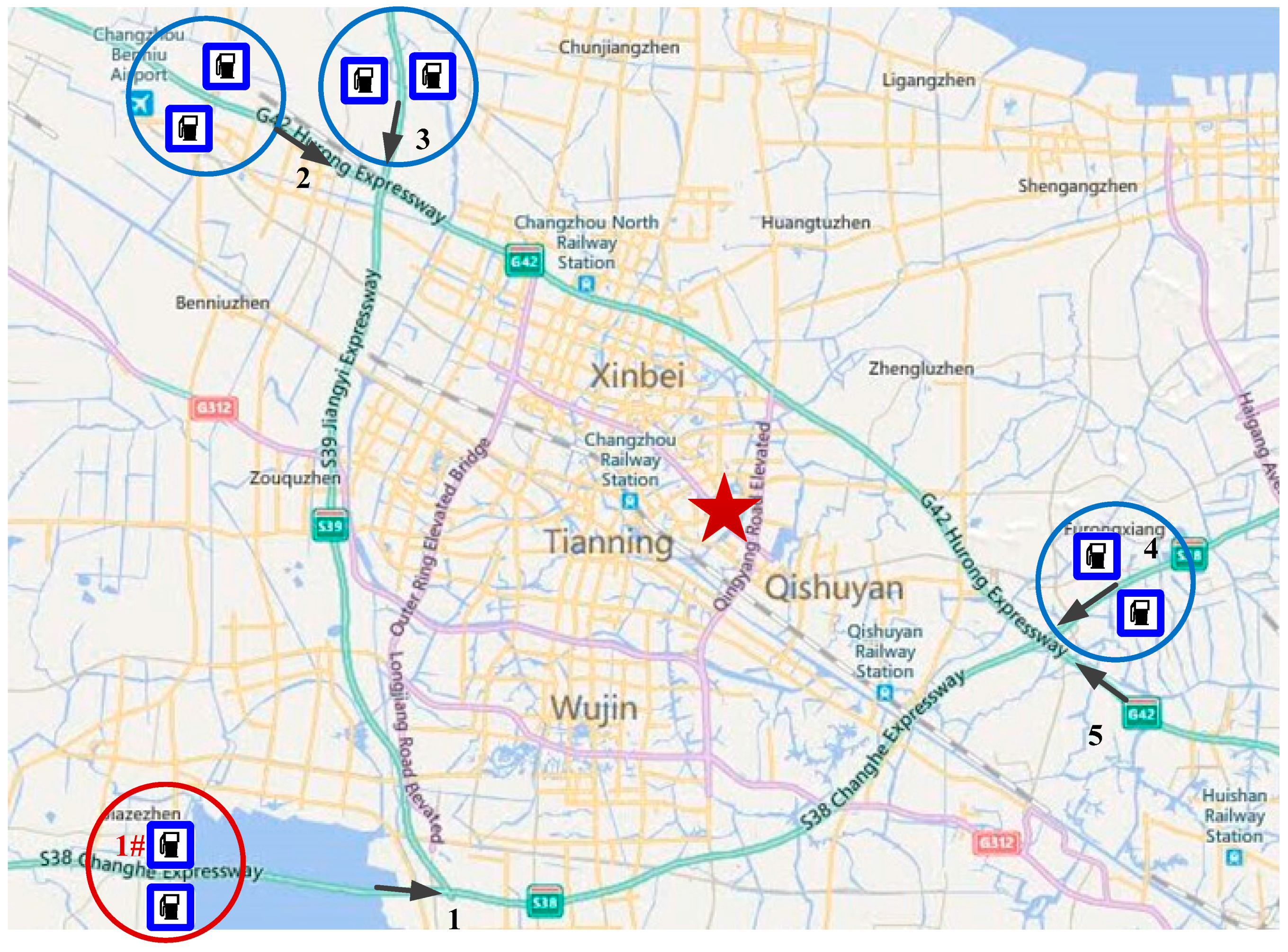
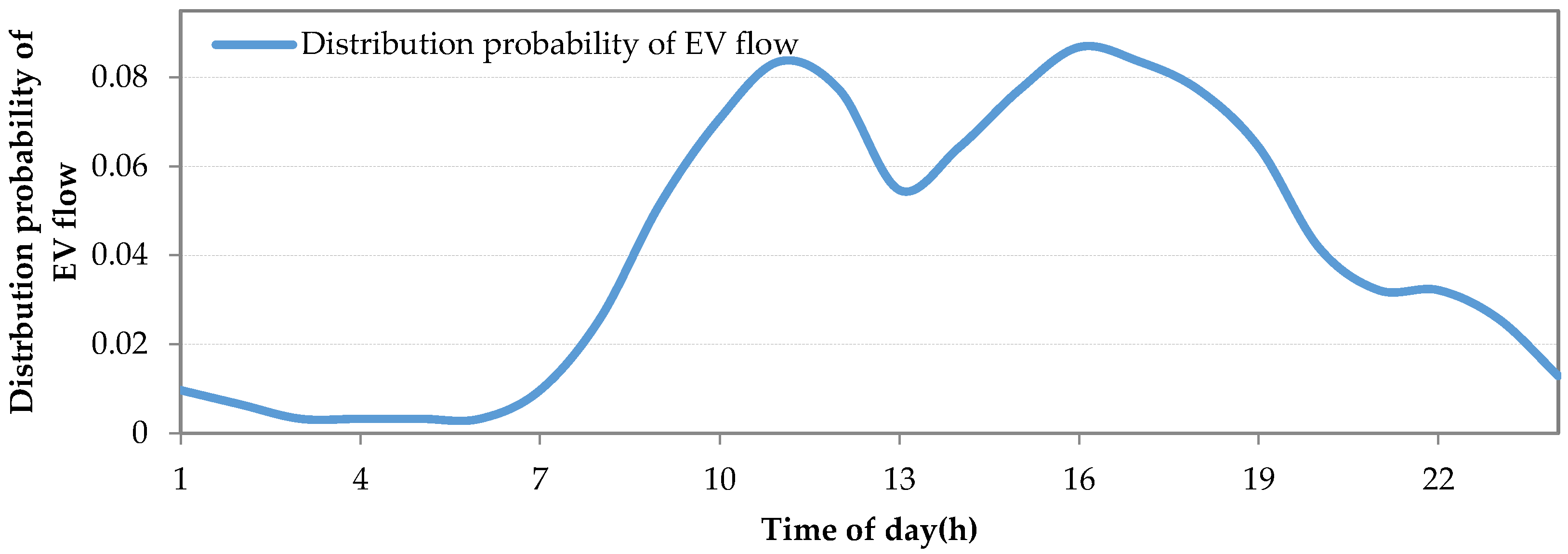
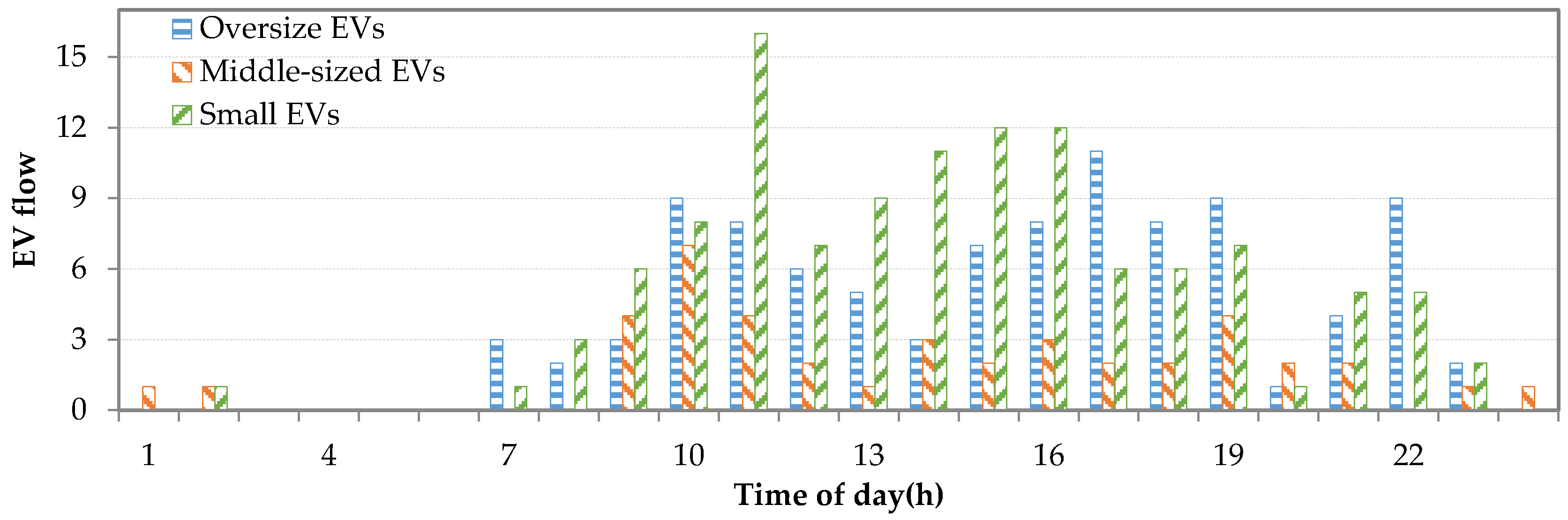
A solution for analysis and verification of the new quick-charging strategy is proposed, including the power distribution models for charging, the established queuing model of CS according to statistics of multi-type gasoline vehicles on Jiangsu highway, and the improved queuing algorithm, which can provide an important basis for the simulation.
2. New Quick-Charging Strategy and Power Distribution Model
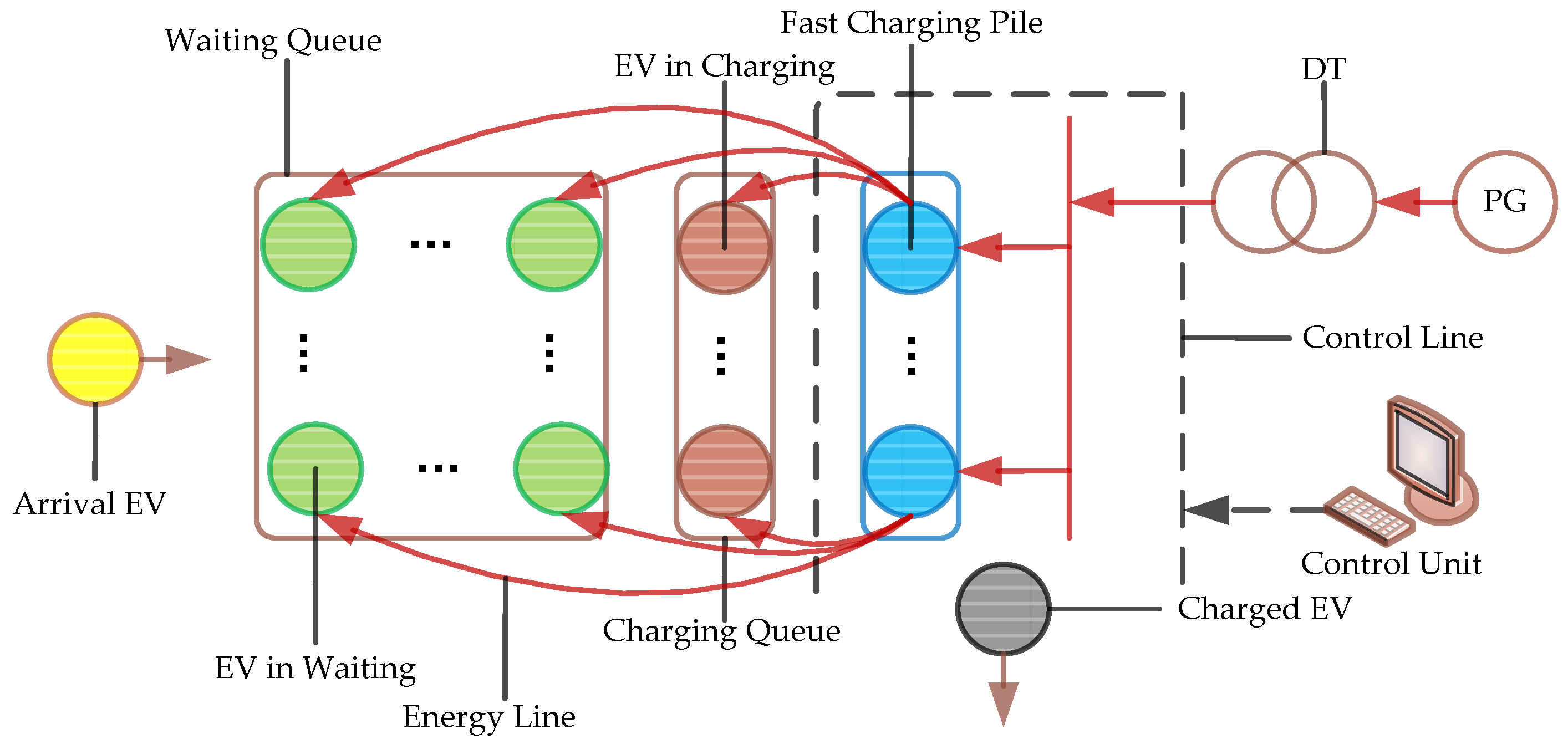
The charging infrastructure system structure of the new quick CS established by this paper is shown in
Figure 1. The system consists of a power grid (PG), distribution transformer (DT), fast-charging piles with multiple power output interfaces, a control unit, and EVs in the station. In addition, EVs, regardless of where they are in the charging service queue—either charging or waiting in the queue—are all connected to the corresponding charging pile. We assume that the control unit and fast-charging piles can track the EV battery power and obtain the EV battery information. The specific processes are as follows: at first, the recommended charging profile [
6,
7] of each EV can be built into its battery management system (BMS) before leaving the factory. In addition, a charging-data communication channel can be established between the BMS of EV and the connected fast-charging pile. Secondly, the recommended charging profile of the charged EV can be transmitted to the connected fast-charging pile via the charging-data communication channel. Thirdly, the connected fast-charging pile, controlled and supplied with required electrical energy from the power grid by the control unit, can collect the real-time EV charging profile and the state of charge (SOC) of the battery being charged in the EV, which can output and adjust the charging power according to the real-time EV charging profile and SOC of the EV battery.
Like conventional quick CSs, the new quick CS is also equipped with a number of the same type of quick-charging piles to realise common utilisation of multiple types of EVs; the difference, however, is that the charging pile of the new CS has a number of power output interfaces, which can provide charging services to EVs in the waiting queue without any effects on other EVs in the charging process. In
Figure 1, the number of output interfaces for charging piles depends on the specific charging equipment. In addition, the charging pile can adjust the power allocation among several EVs. There are thus four states for EVs in the quick CS: arrival state, waiting state, charging state, and departure state. Generally, conventional quick CSs do not provide any services to waiting state EVs. In contrast, this paper breaks out of such a conventional service mode and proposes a new quick-charging strategy (NQCS) for EVs based on the charging infrastructure system structure of the new quick CS: on the premise of not affecting any other EVs being charged, the remaining power of the quick-charging pile with multiple power output interfaces is used to provide synchronous charging services for EVs waiting in the queue. In the NQCS, one power output interface of the quick-charging pile is configured as the main output interface for providing a charging service to the charging state EVs; the remaining power output interfaces are configured as sub-output interfaces for providing a charging service to waiting EVs; and the main and sub-output interfaces can all be set according to state and entrance order of the connected EVs, so as to avoid the problem of non-continuity in the charging process when an EV’s state turns from waiting into charging. In addition, the power of the main output interface of each charger is offered according to the priority required to meet charging EV needs: each charging pile allocates the remaining power to waiting state EVs on demand one by one without interfering with the charging EV. There are two power distribution methods, i.e., the average power distribution method and on-demand power distribution method [
19], the mathematical models of which are described below.
2.1. Average Power Distribution Model
In the NQCS, each quick-charging pile independently operates and corresponds to a number of parking spaces for providing charging services to charging state, and waiting state, EVs. For each quick-charging pile, it not only satisfies the charging demand of the charging state EVs, but also allocates the remaining power to waiting state EVs on an average need basis. At the same time, it restrains the charging power of waiting state EVs for not exceeding the quick-charging power limit of the corresponding battery. Thus, the distribution power for each EV in waiting can be calculated as:
where
is the minimum value function;
is the allocated power for the waiting state EV
i which is connected to quick-charging pile
k;
is the maximum power of charging pile
k;
is the power of charging EV connected to the quick-charging pile
k;
n is the multi-power output quick-charging pile number;
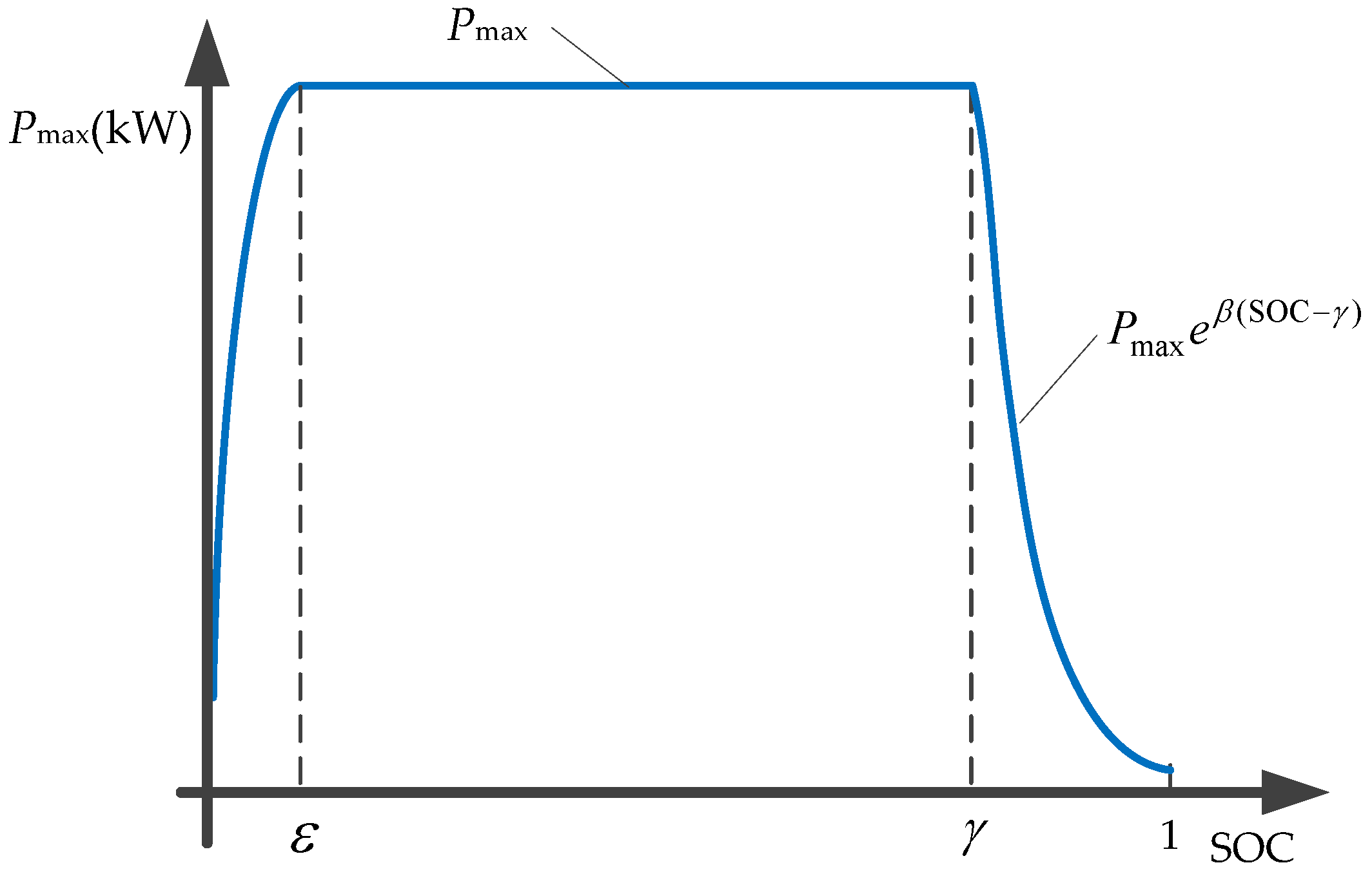
is the quick-charging power limit of the battery of the waiting state EV
i, which is a function of its state of charge as shown in
Figure 2. Considering the battery life [
6,
7], it is recommended that the remaining SOC of EV battery is not too low before charging. Therefore, in this paper, the charging power limit between 0 to ε is not considered.
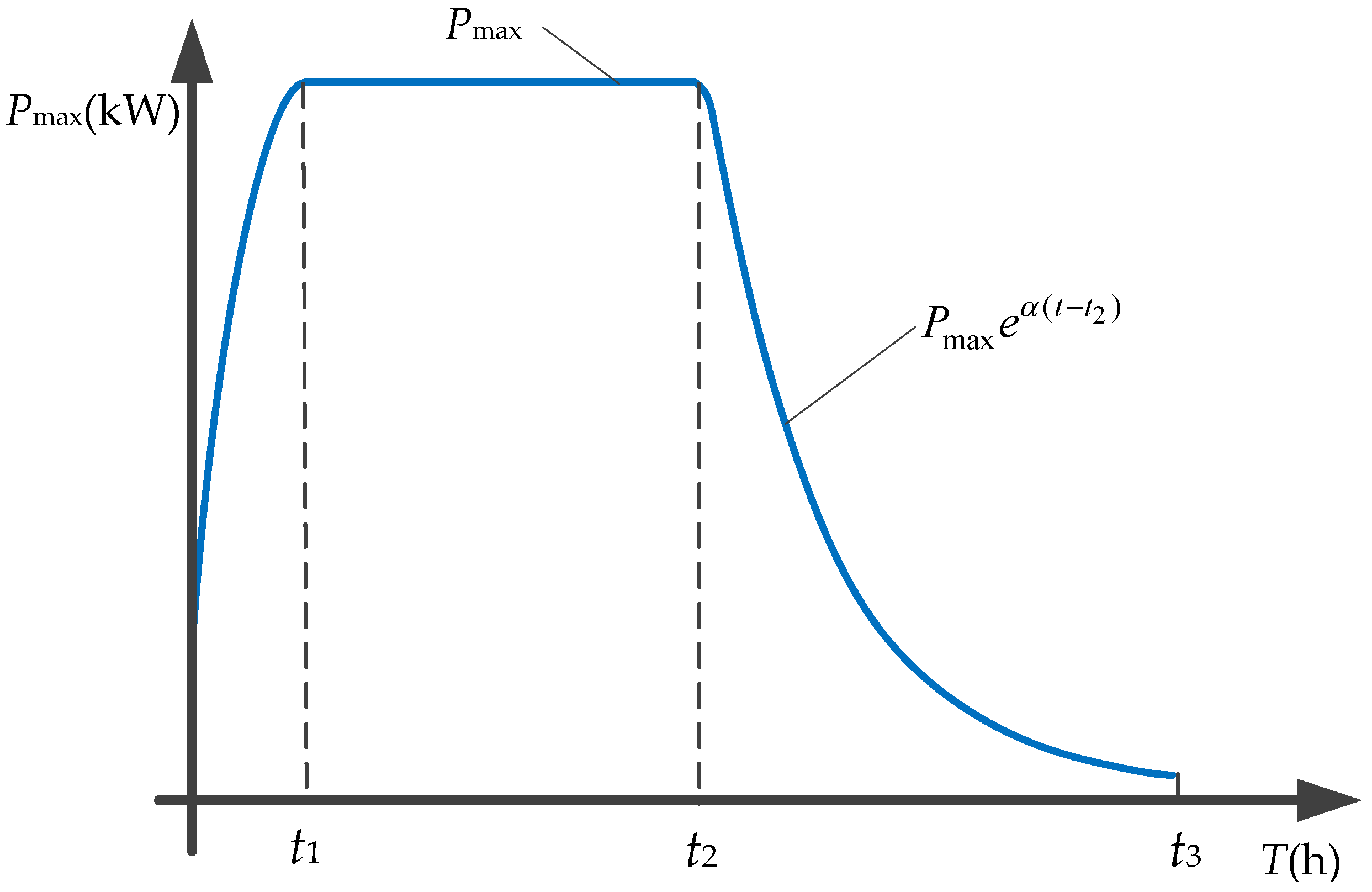
The recommended charging profile in
Figure 2 is specific to the particular manufacturer of EV battery, which generally contains two stages: constant power and variable power stages. To maintain EV battery health, it is recommended that the charging power profile served by fast chargers not exceed the charging profile defined by the manufacturer [
6,
7]. The charging power limit of the battery is calculated as:
where
is the maximum charging power for battery of EV
i; ε, β and γ are charging parameters of the EV battery
i; ε or γ is the battery SOC level corresponding to the start/end of the constant power stage accepting the charging power profile; and β is a fitting parameter of the exponential function used for the accepted charging power profile.
2.2. On-Demand Power Distribution Model
According to the operating mechanisms of highway CSs and EVs, EV users consciously accept a charging service in accordance with the principle of “first in, first-charged”. In addition, the charging state EV has the highest priority for a charging service; the EV following it has the second priority; and the remaining waiting state EVs have the lowest priority. For each quick-charging pile, it allocates the remaining power to waiting state EVs on demand. At the same time, it restrains the charging power of waiting state EVs so as to not exceed the quick-charging power limit of the corresponding battery. Thus, the distribution power for each EV in waiting can be calculated as:
where
is the allocated power for the waiting state EV
i which is connected to the quick-charging pile
k;
is the remaining power for the waiting state EV
i, which is calculated as:







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}