
Combined Two-Stage Stochastic Programming and Receding Horizon Control Strategy for Microgrid Energy Management Considering Uncertainty

Abstract
:1. Introduction
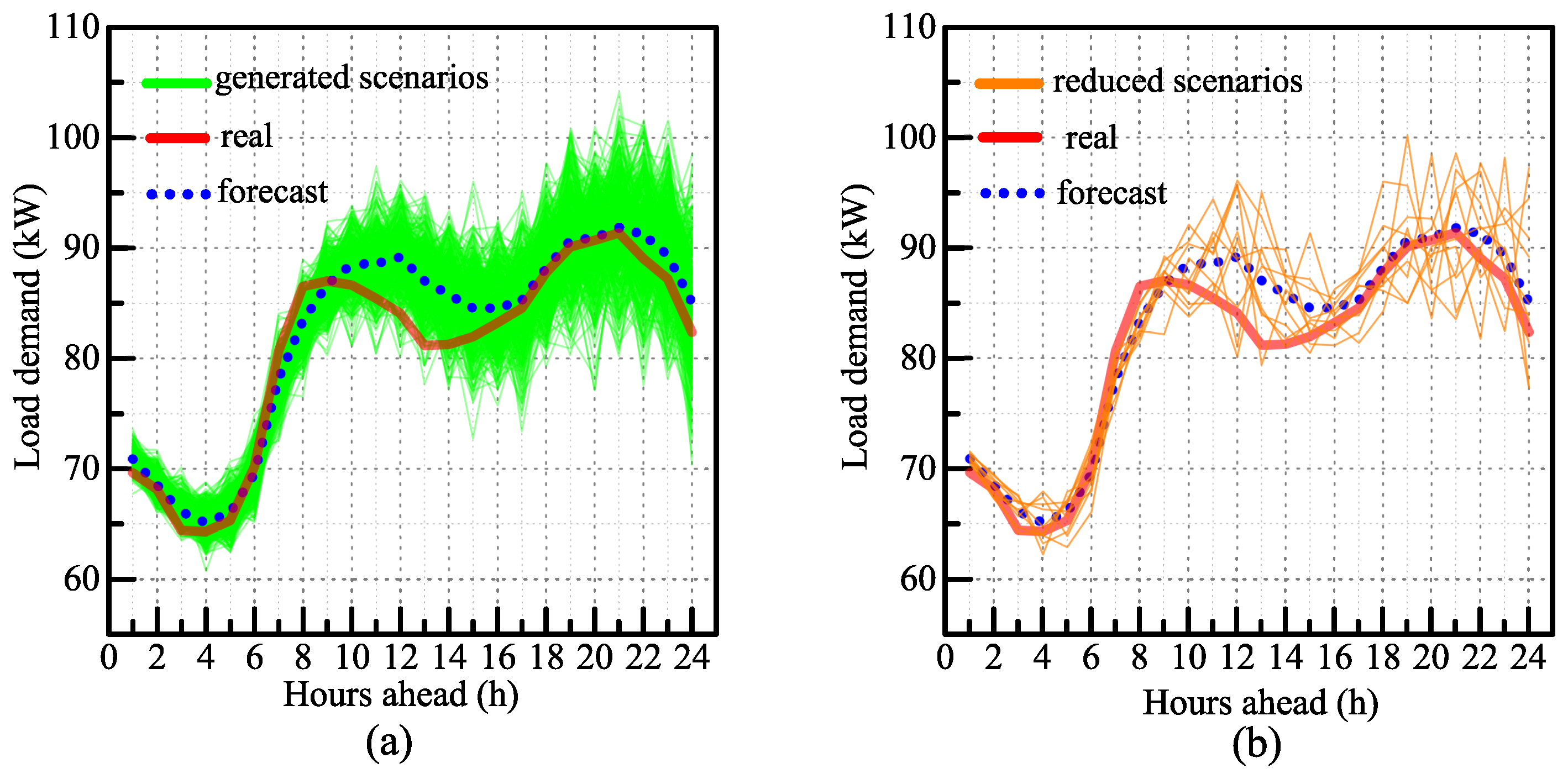
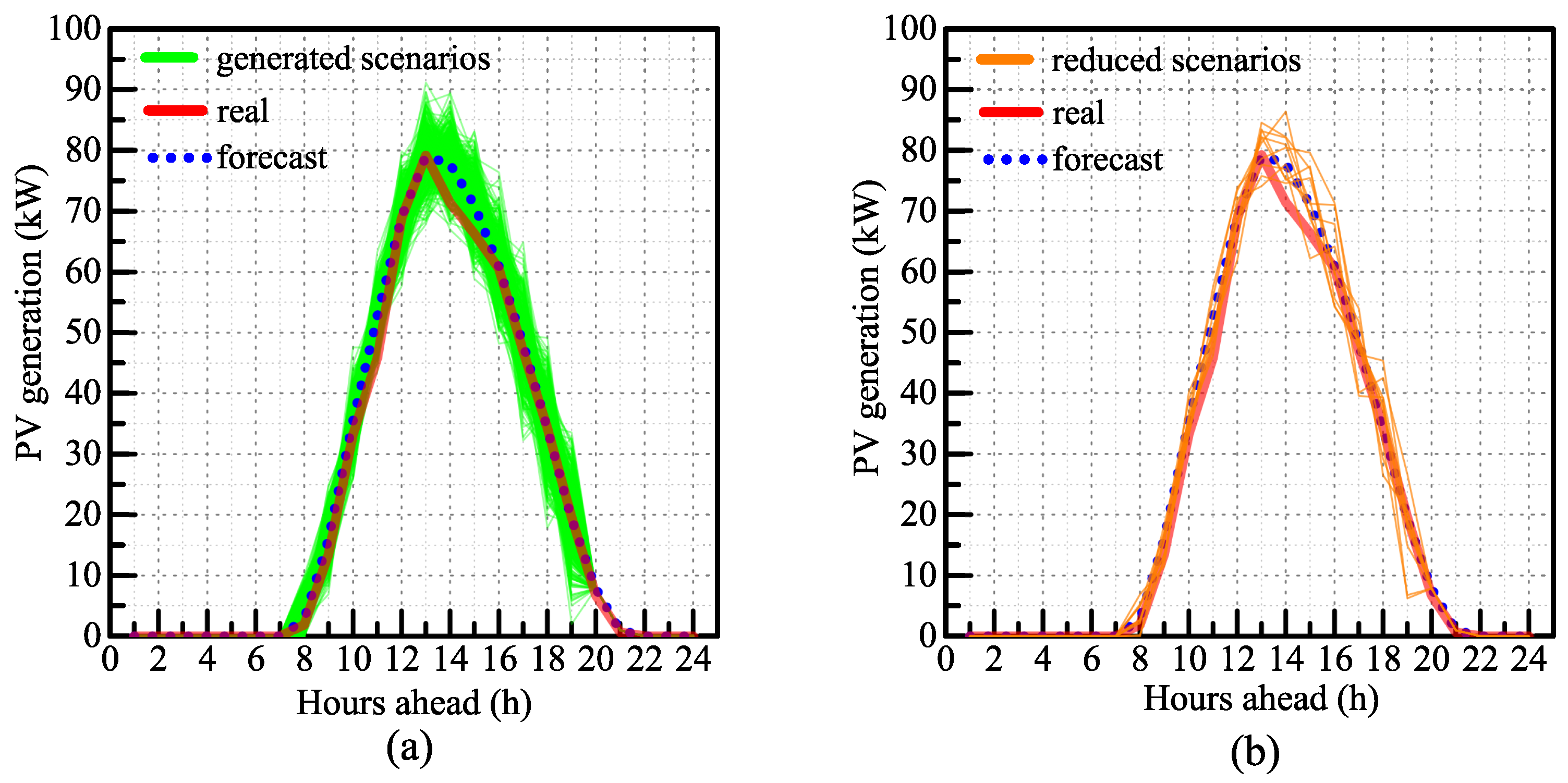
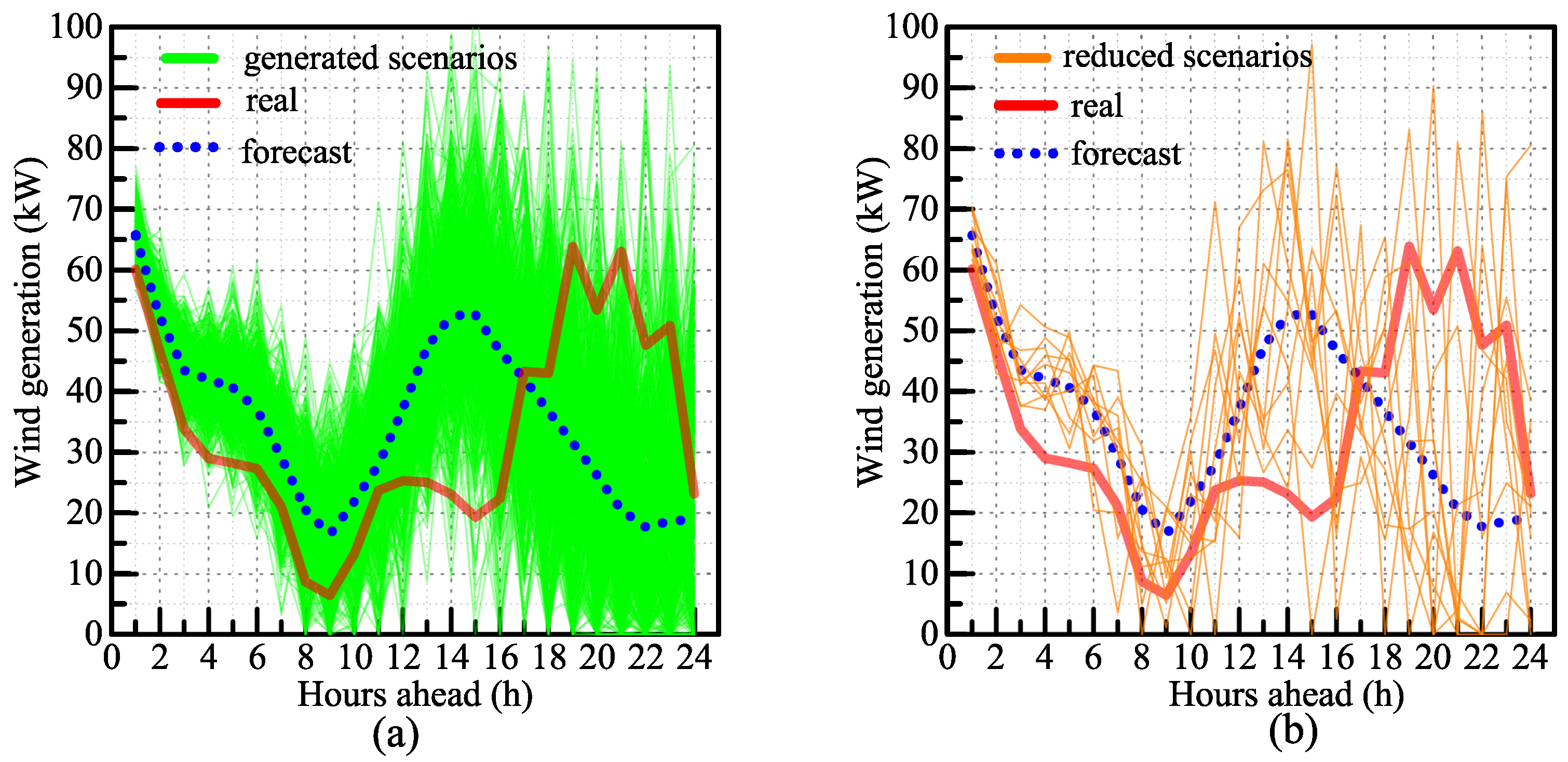
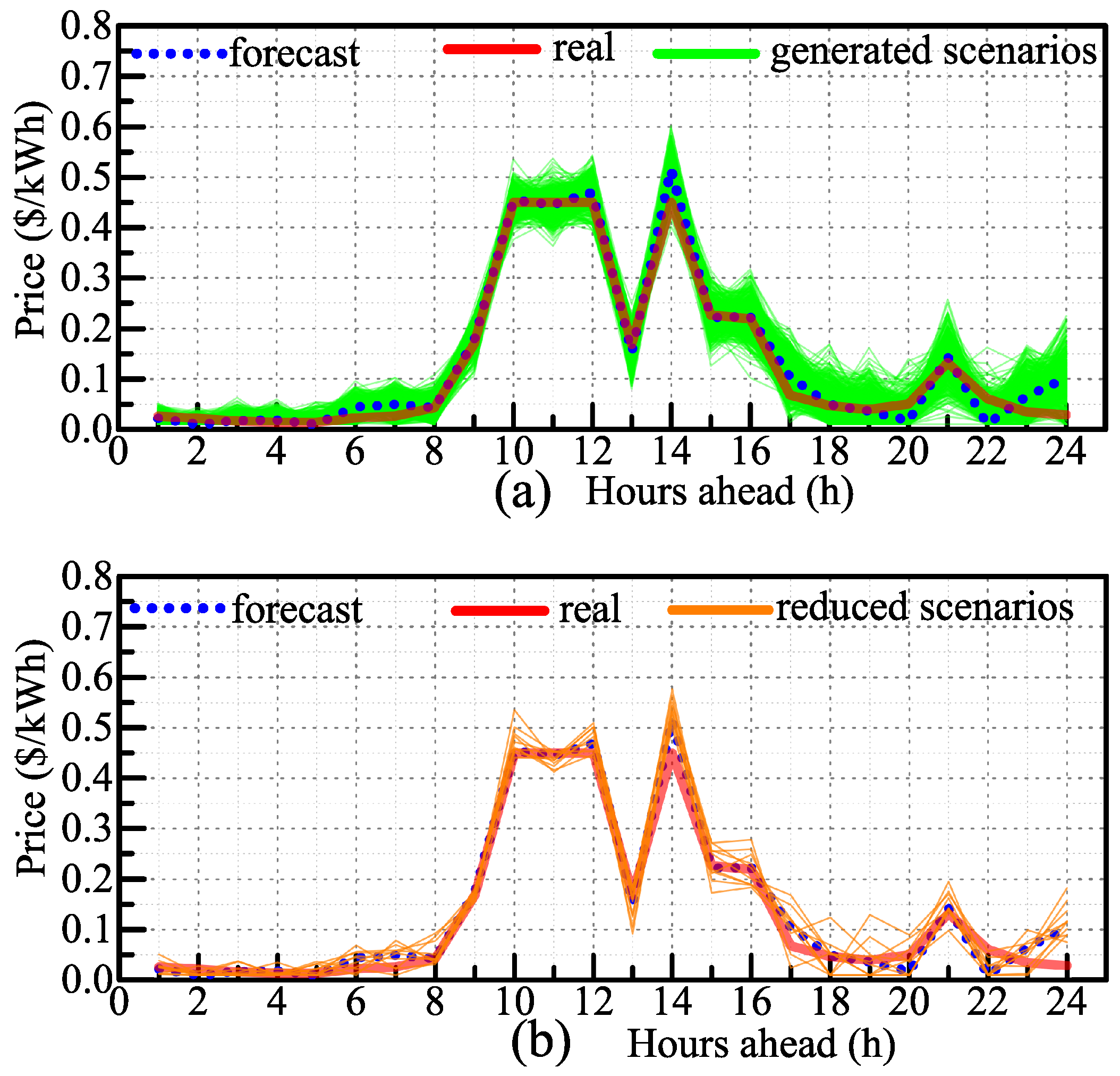
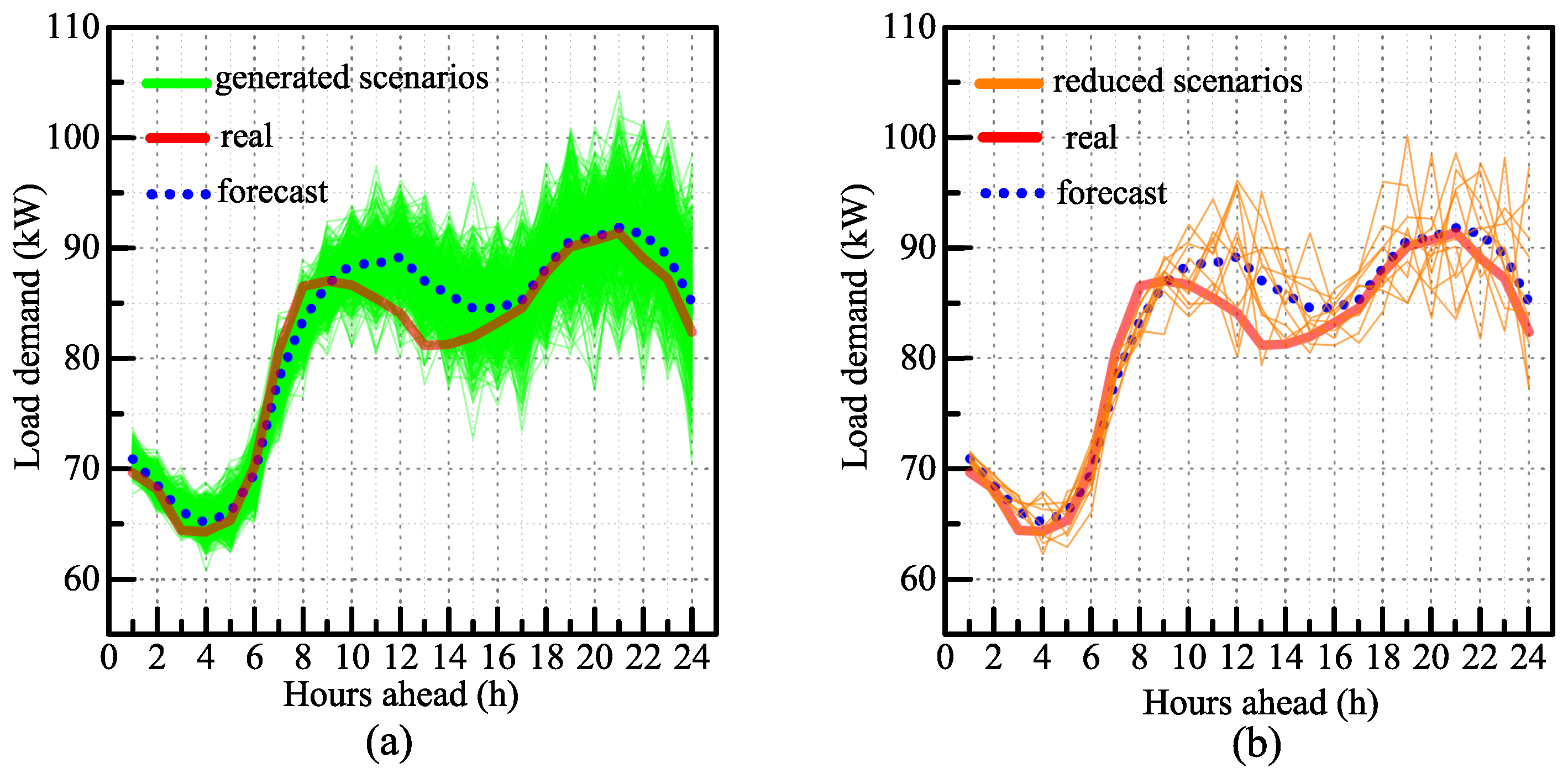
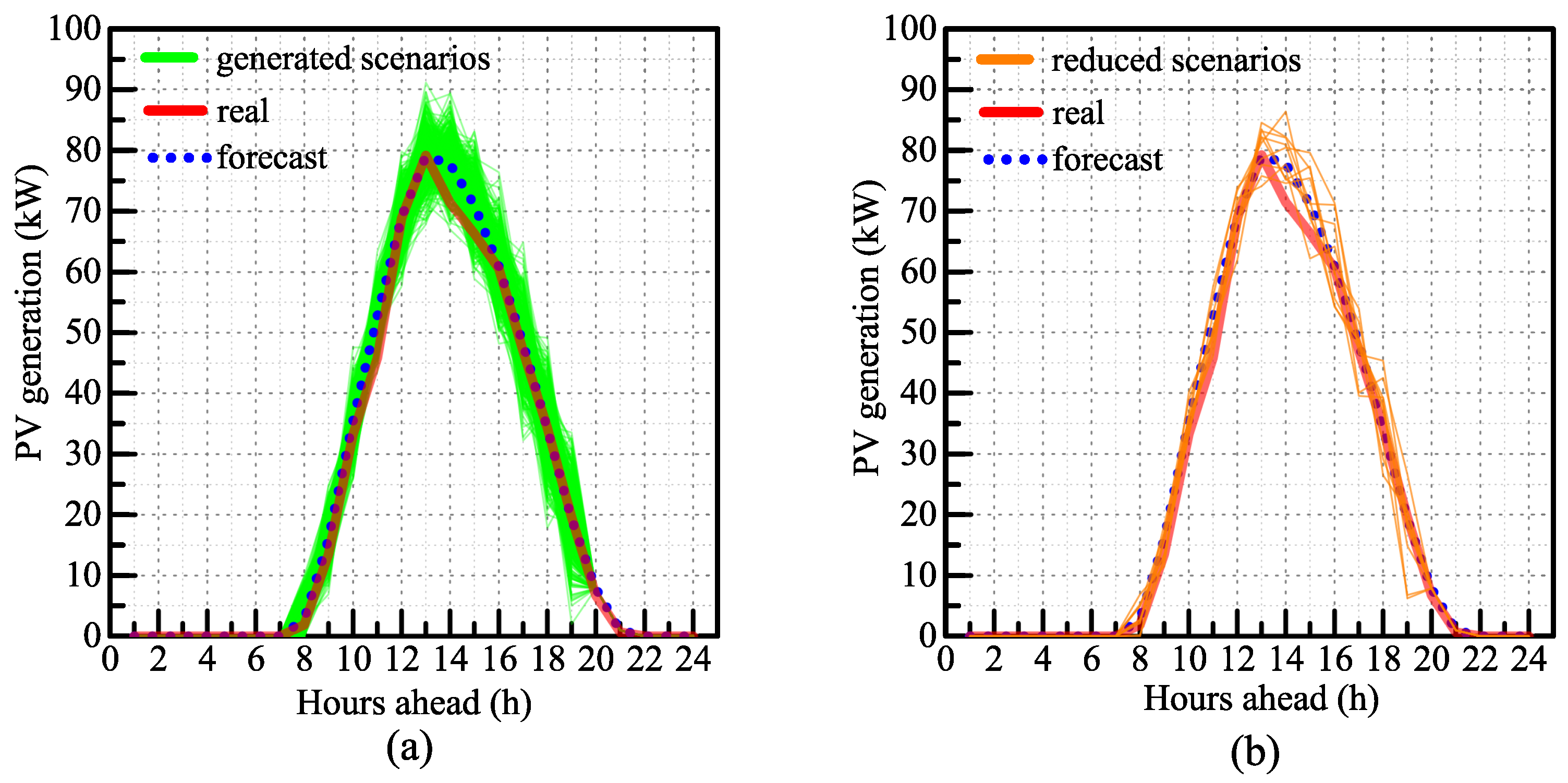
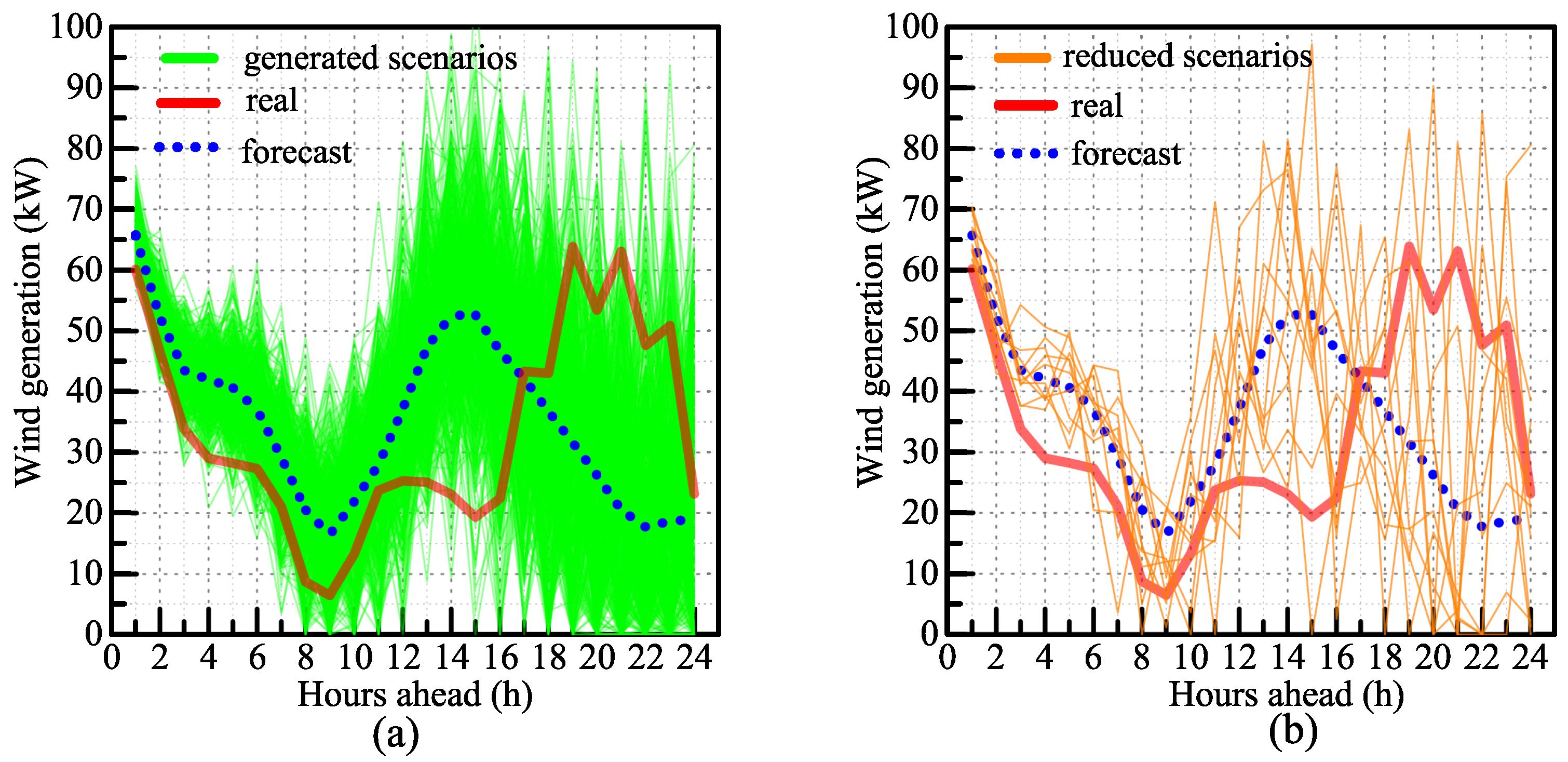
2. Scenario Generation and Reduction
2.1. Modeling the Uncertainty in an MG
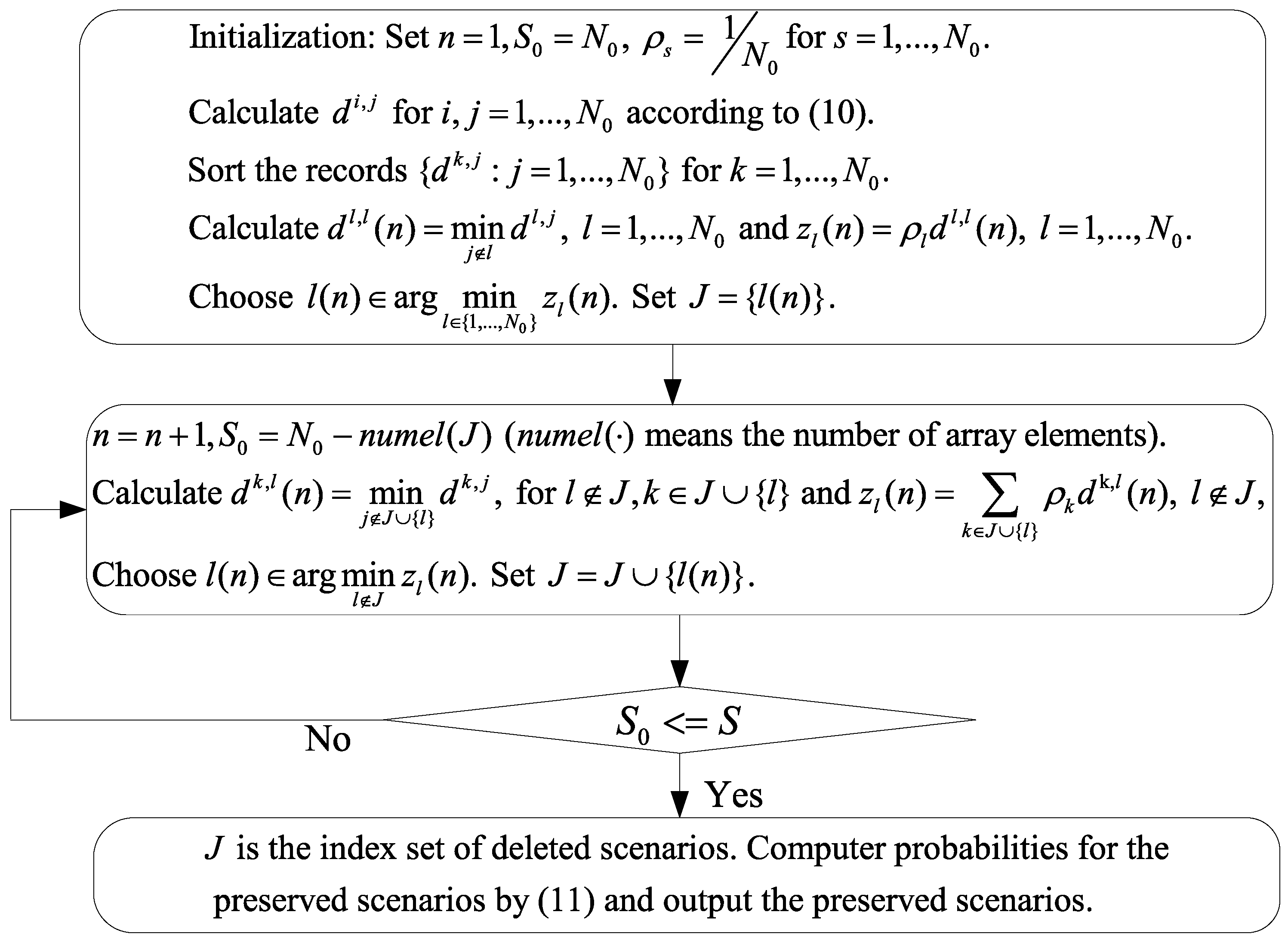
2.2. Scenario Reduction
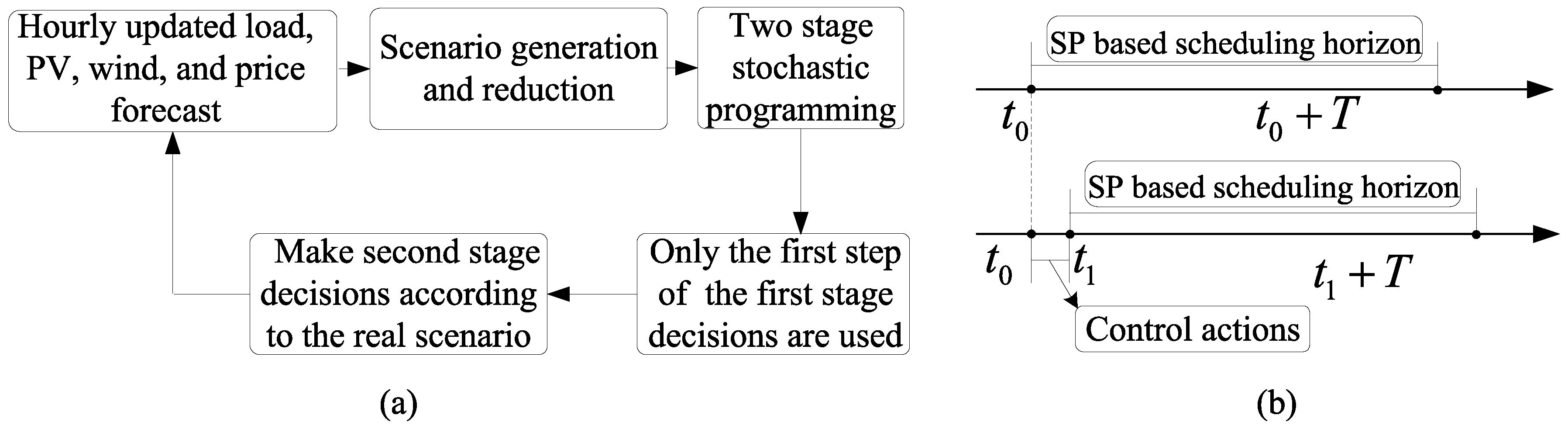
3. Two-Stage Stochastic Programming Formulation for Microgrid Energy Management
3.1. Objective Function
3.2. First-Stage Constrains
3.3. Second-Stage Constraints
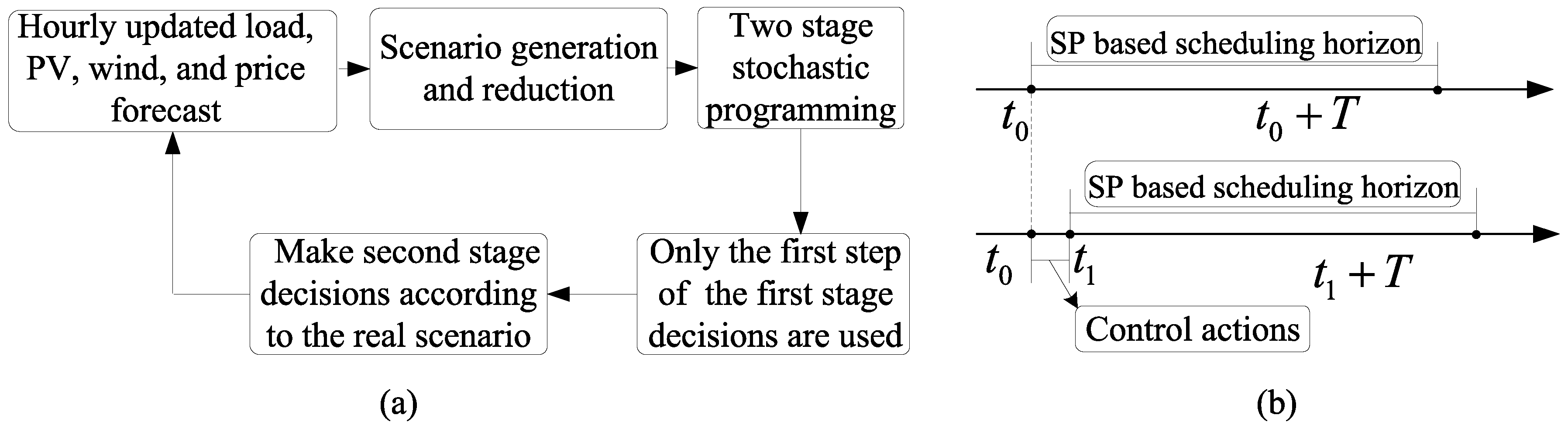
4. Receding Horizon Control
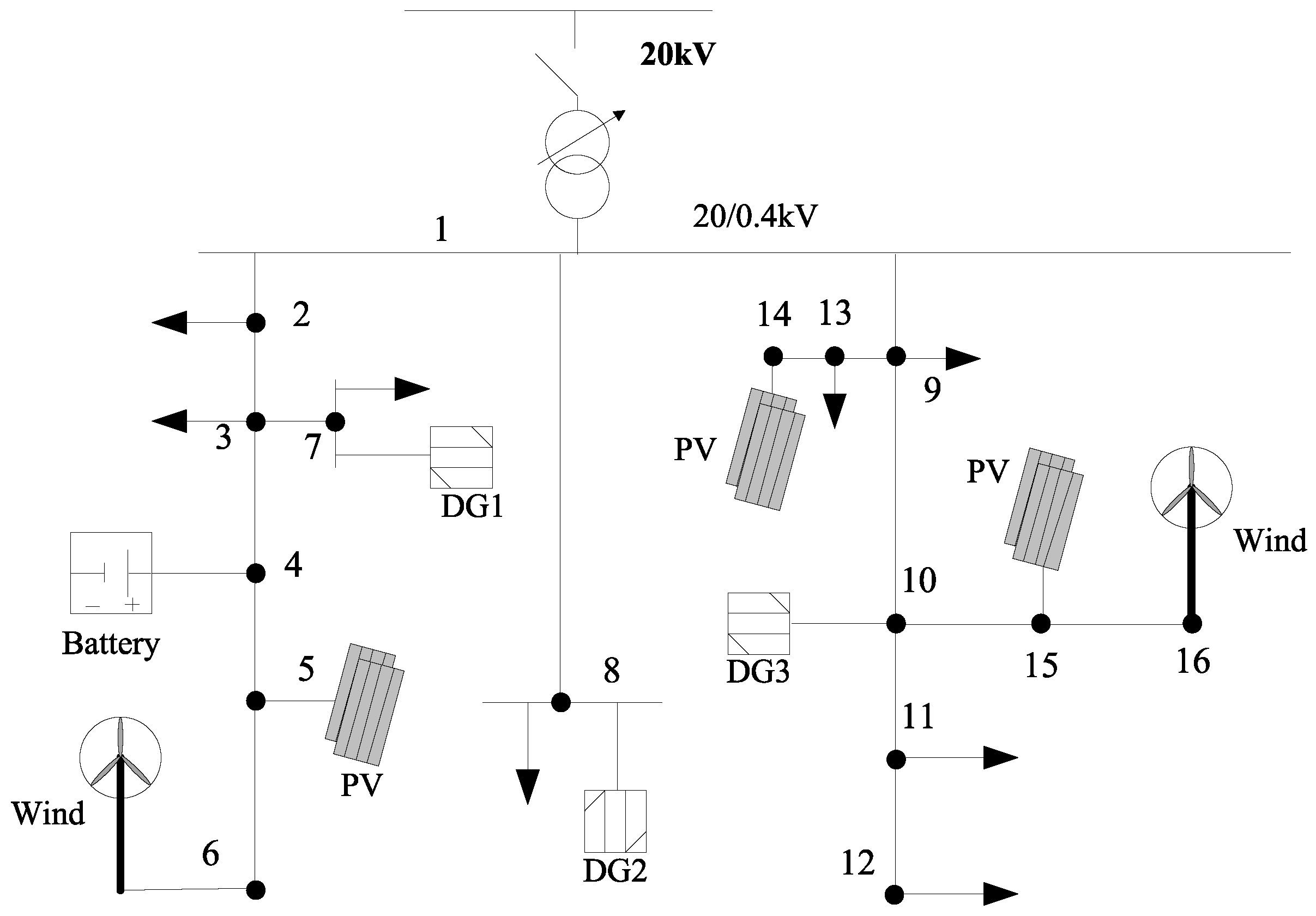
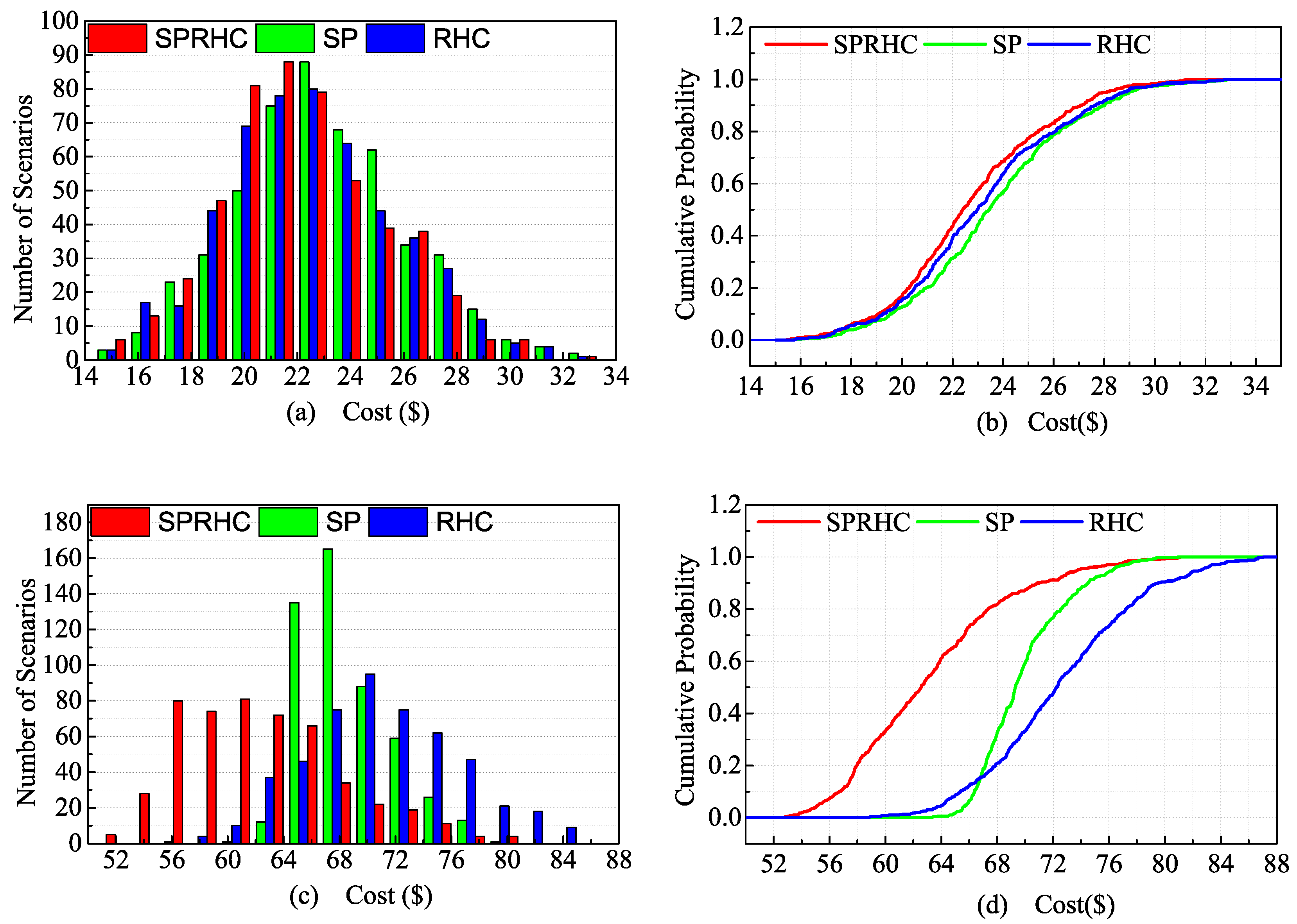
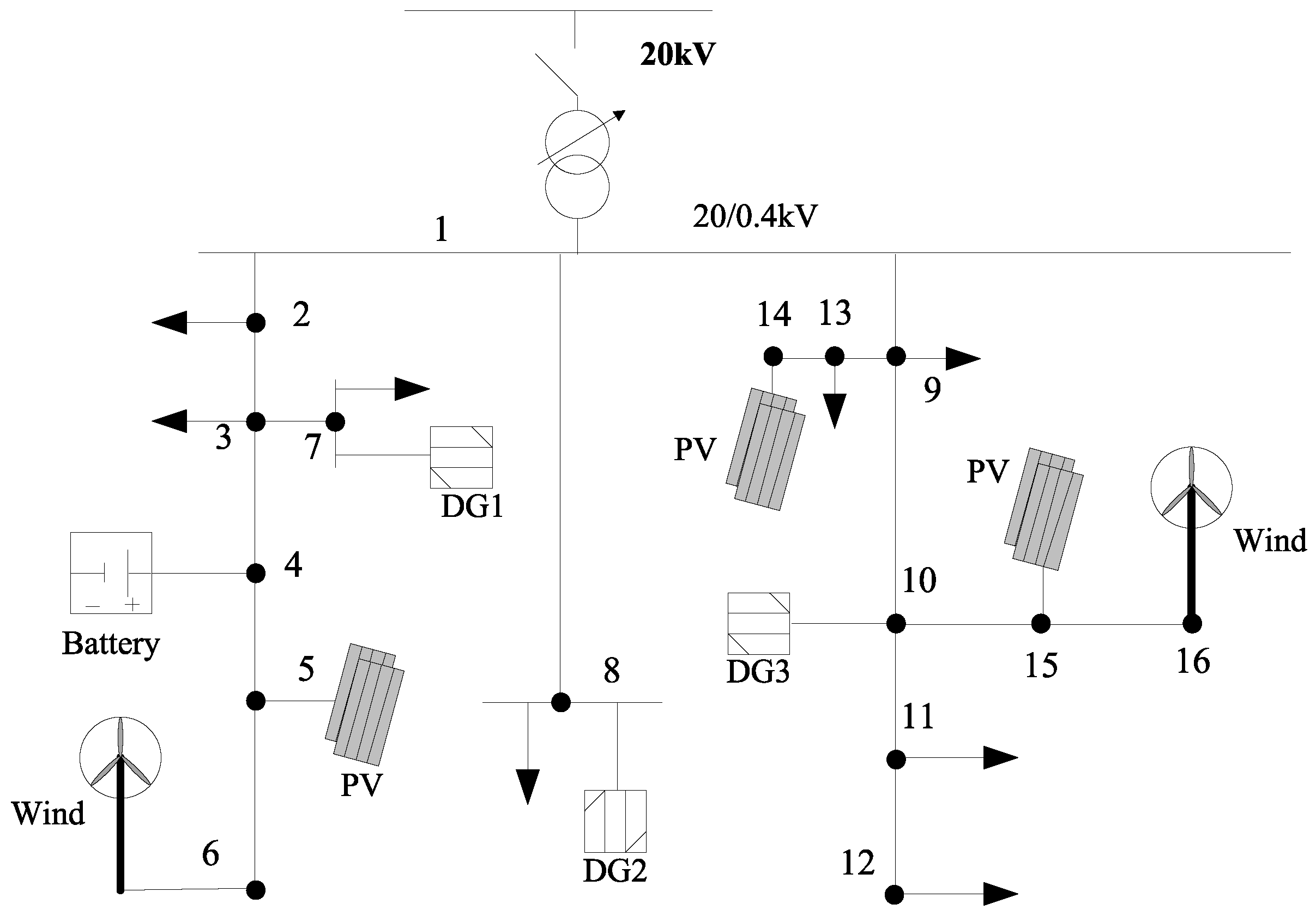
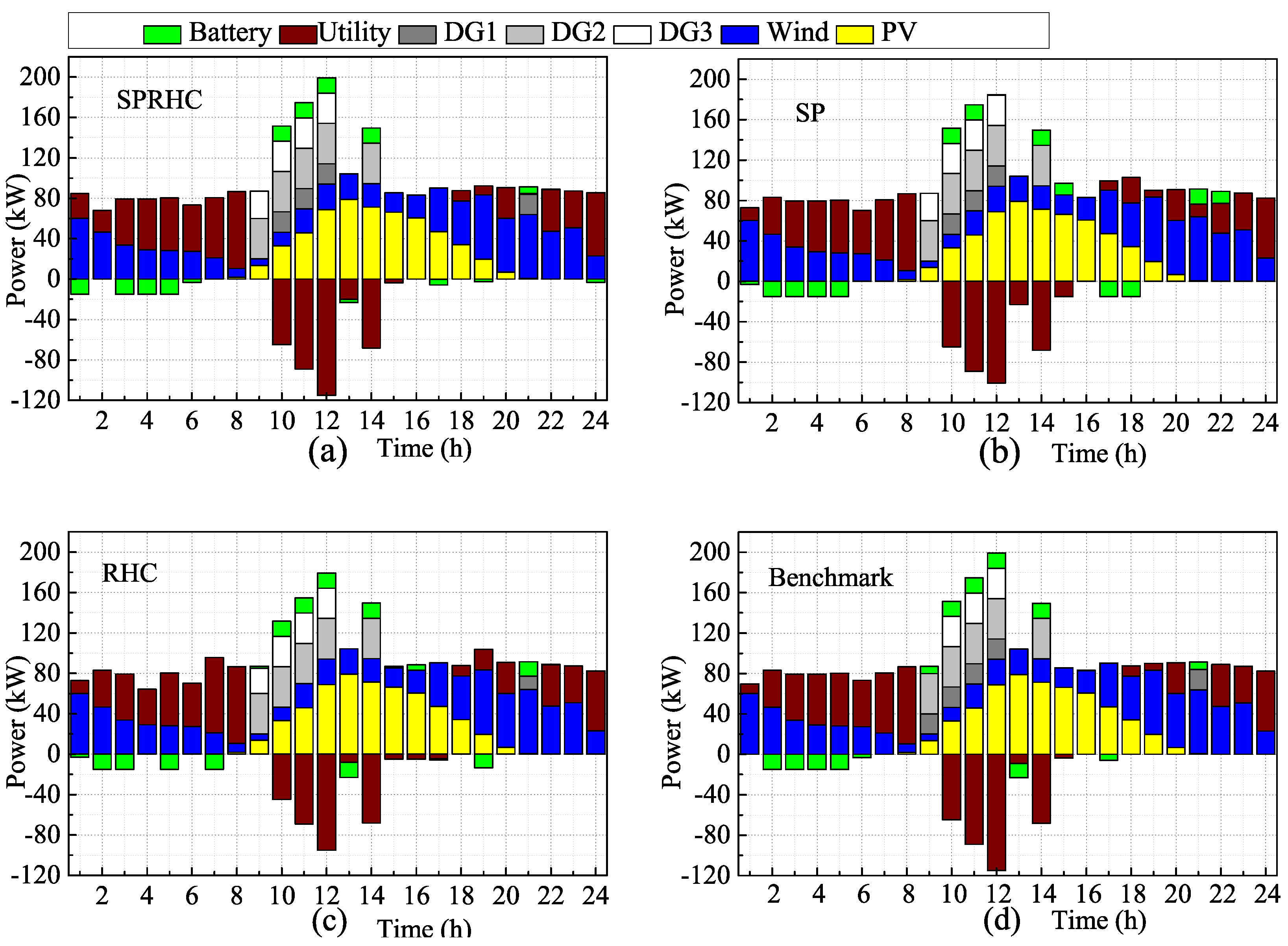
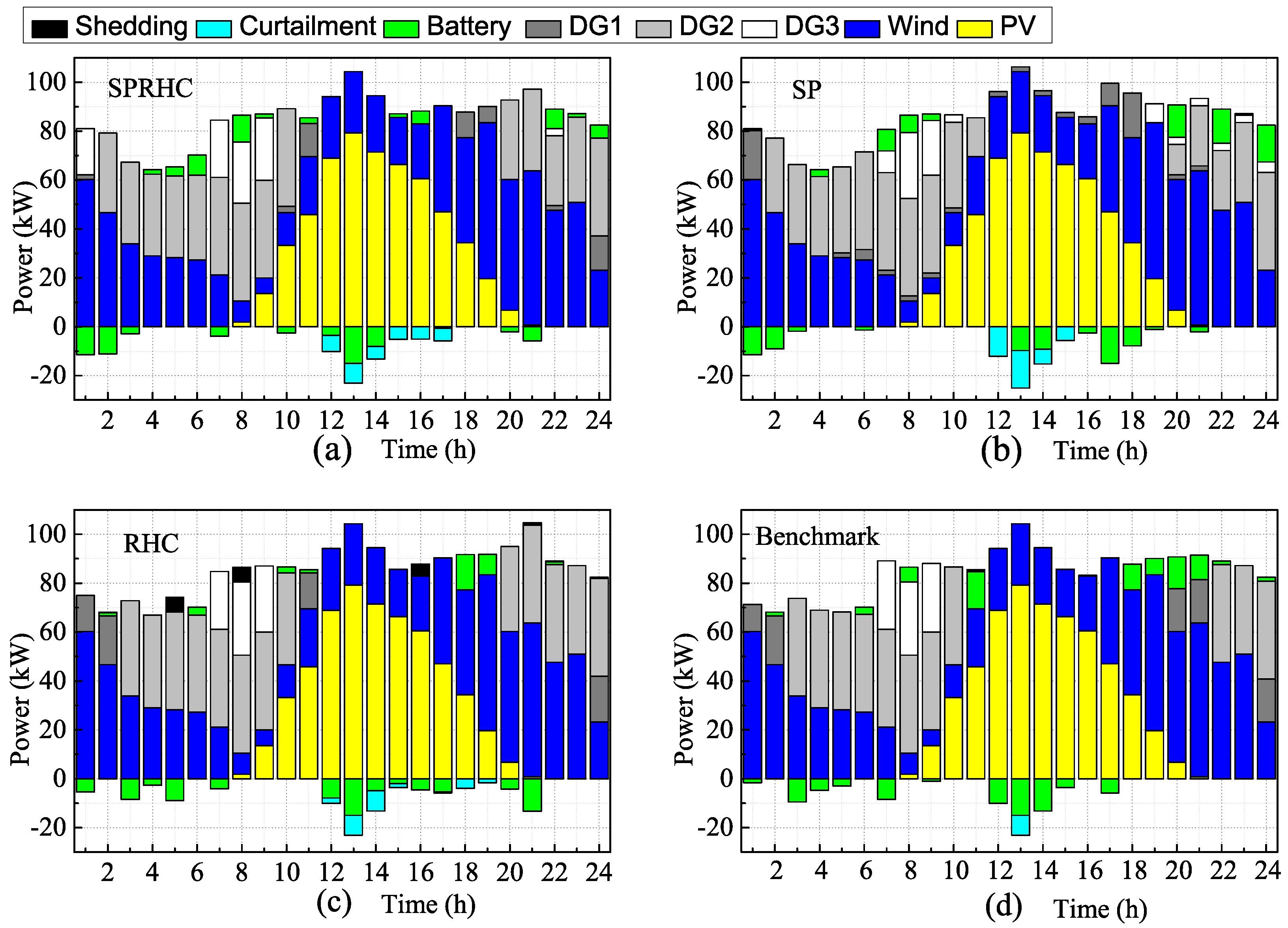
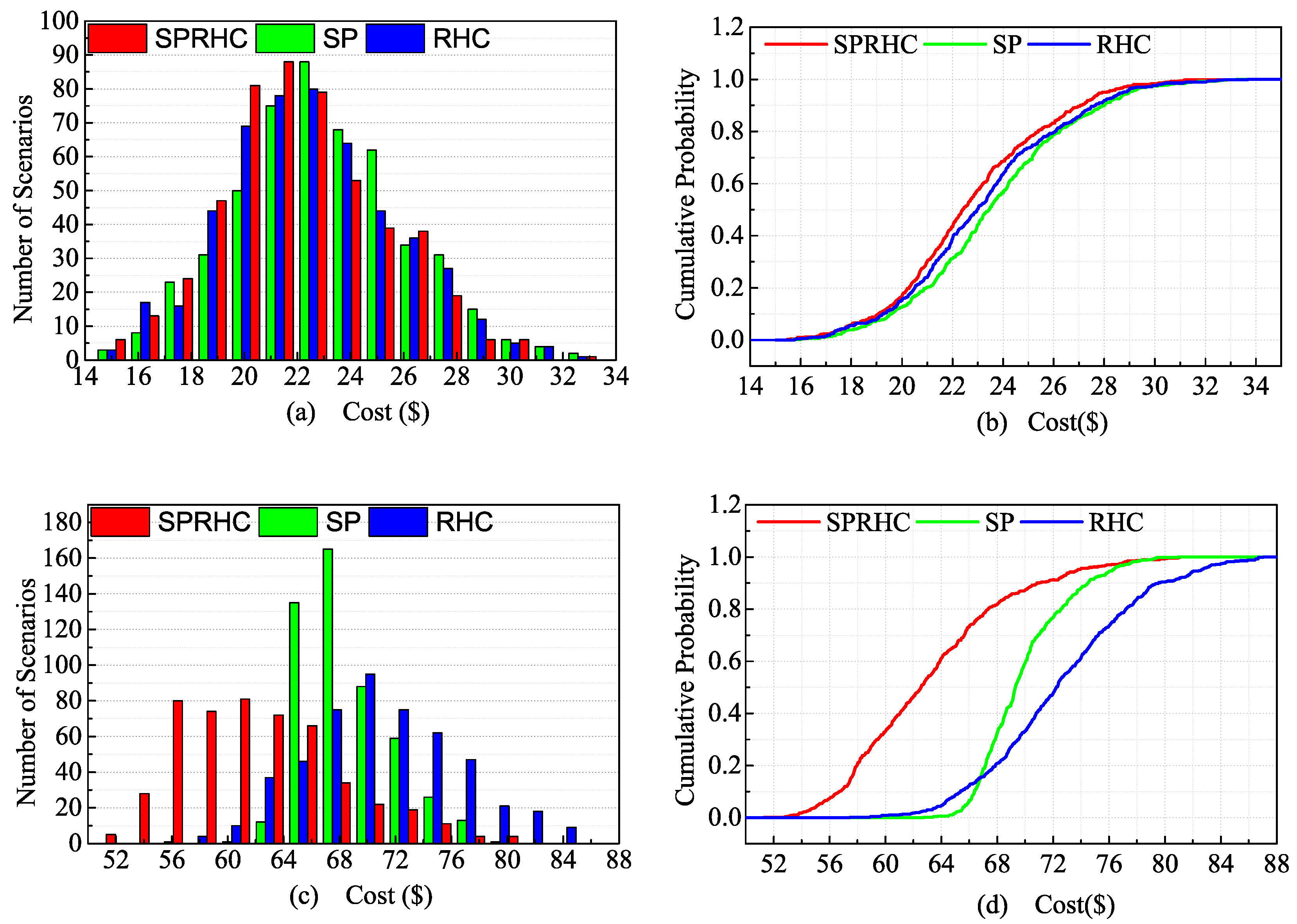
5. Numerical Experiments
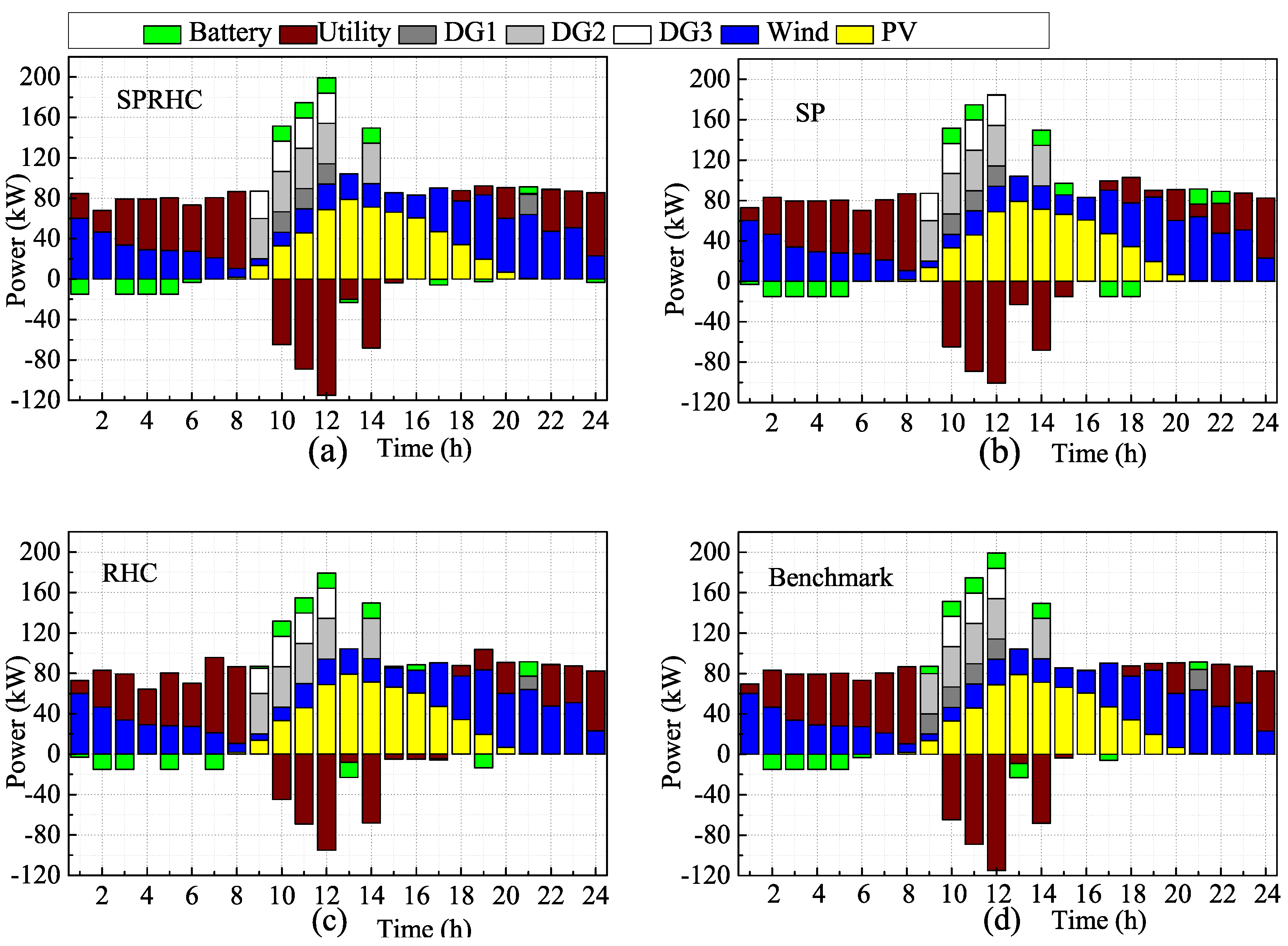
- (1)
- SPRHC: the 24 h horizon power schedule was obtained by solving the two-stage stochastic programming problem described in Section 3 with the proposed SPRHC strategy.
- (2)
- SP: the 24 h horizon power schedule was obtained by solving the two-stage stochastic programming problem described in Section 3 with only an SP strategy.
- (3)
- RHC: the 24 h horizon power schedule was obtained by solving the optimization problem with only RHC strategy based on forecasted values of load demand, PV and wind power production, and electricity price, without considering the forecast errors.
- (4)
- Benchmark: the 24 h horizon power schedule was obtained by solving the optimization problem with perfect forecast, it assumes that the operator knows all the future realizations of the uncertainty in PV, wind, load, and electricity price.
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclature
Indexes and Decision Variables
| i | index of controllable DGs from 1 to |
| t | index of time interval form 1 to T |
| s | index of scenarios from 1 to S |
| binary variable to indicate the on/off (1/0) state of the ith DG, at time interval t, set | |
| , | binary variable to indicate the charging state, discharging state of the battery, at time interval t |
| active power generation of the ith DG, at time interval t in scenario s (kW) | |
| , | charging, discharging power of battery system at time interval t (kW) |
| , | imported, exported power of the MG at time interval t in scenario s (kW) |
| , | loading shedding, power curtailment at time interval t in scenarios s (kW) |
Parameters and Variables
| T | number of time intervals; here equals 24 |
| time interval; here equals 1 h | |
| total number of controllable DGs | |
| S | total number of scenarios |
| , , , | normalized forecast errors of PV, wind, load, and price for t time intervals ahead forecast in scenario s, respectively |
| , , , | normalized standard deviations of PV, wind, load, and price forecast errors for t time intervals ahead forecast in scenario s |
| , , | forecast values of aggregated power production of PV, wind, and load demand at time interval t (kW) |
| , , | aggregated power productions of PV, wind, and load demand at time interval t in scenario s (kW) |
| , | forecast price of imported power from the utility or exported power to the utility at time interval t ($/kWh) |
| , | prices of imported power from the utility or exported power to the utility at time interval t in scenario s ($/kWh) |
| , , | degradation cost of the battery system, load shedding cost, and generation curtailment cost ($/kWh) |
| probability of scenario s | |
| , | minimum, maximum power output of the ith DG (kW) |
| , | start-up, shut-down cost of the ith DG ($) |
| , | variable to indicate start-up or shut-down state of the ith DG at time interval t, respectively |
| cost function of ith DG ($/h) | |
| , | battery charging and discharging efficiencies |
| maximum charging/discharging power of battery system(kW) | |
| , | minimum, maximum SoC of battery system (kWh) |
| , | SoC of battery at time interval t, and the initial value of SoC (it is set to ) (kWh) |
References
- Marnay, C.; Chatzivasileiadis, S.; Abbey, C.; Iravani, R.; Joos, G.; Lombardi, P.; Mancarella, P.; von Appen, J. Microgrid Evolution Roadmap. In Proceedings of the 2015 International Symposium on Smart Electric Distribution Systems and Technologies (EDST), Vienna, Austria, 8–11 September 2015; pp. 139–144.
- Wang, R.; Wang, P.; Xiao, G. A robust optimization approach for energy generation scheduling in microgrids. Energy Convers. Manag. 2015, 106, 597–607. [Google Scholar] [CrossRef]
- Kuznetsova, E.; Li, Y.F.; Ruiz, C.; Zio, E. An integrated framework of agent-based modelling and robust optimization for microgrid energy management. Appl. Energy 2014, 129, 70–88. [Google Scholar] [CrossRef]
- Bertsimas, D.; Litvinov, E.; Sun, X.A.; Zhao, J.; Zheng, T. Adaptive Robust Optimization for the Security Constrained Unit Commitment Problem. IEEE Trans. Power Syst. 2013, 28, 52–63. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, J.; Liu, P.; Li, Z.; Georgiadis, M.C.; Pistikopoulos, E.N. A two-stage stochastic programming model for the optimal design of distributed energy systems. Appl. Energy 2013, 103, 135–144. [Google Scholar] [CrossRef]
- Li, H.; Zang, C.; Zeng, P.; Yu, H.; Li, Z. A stochastic programming strategy in microgrid cyber physical energy system for energy optimal operation. IEEE/CAA J. Autom. Sin. 2015, 2, 296–303. [Google Scholar]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Smart microgrid energy and reserve scheduling with demand response using stochastic optimization. Int. J. Electr. Power Energy Syst. 2014, 63, 523–533. [Google Scholar] [CrossRef]
- Niknam, T.; Azizipanah-Abarghooee, R.; Narimani, M.R. An efficient scenario-based stochastic programming framework for multi-objective optimal micro-grid operation. Appl. Energy 2012, 99, 455–470. [Google Scholar] [CrossRef]
- Taylor, J.W.; De Menezes, L.M.; McSharry, P.E. A comparison of univariate methods for forecasting electricity demand up to a day ahead. Int. J. Forecast. 2006, 22, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Martin, L.; Zarzalejo, L.F.; Polo, J.; Navarro, A.; Marchante, R.; Cony, M. Prediction of global solar irradiance based on time series analysis: Application to solar thermal power plants energy production planning. Sol. Energy 2010, 84, 1772–1781. [Google Scholar] [CrossRef]
- Makarov, Y.V.; Etingov, P.V.; Ma, J.; Huang, Z.; Subbarao, K. Incorporating Uncertainty of Wind Power Generation Forecast Into Power System Operation, Dispatch, and Unit Commitment Procedures. IEEE Trans. Sustain. Energy 2011, 2, 433–442. [Google Scholar] [CrossRef]
- Lange, M. On the uncertainty of wind power predictions - Analysis of the forecast accuracy and statistical distribution of errors. J. Sol. Energy Eng.-Trans. ASME 2005, 127, 177–184. [Google Scholar] [CrossRef]
- Parisio, A.; Glielmo, L. Stochastic Model Predictive Control for economic/environmental operation management of microgrids. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 2014–2019.
- Olivares, D.E.; Lara, J.D.; Canizares, C.A.; Kazerani, M. Stochastic-Predictive Energy Management System for Isolated Microgrids. IEEE Trans. Smart Grid 2015, 6, 2681–2693. [Google Scholar] [CrossRef]
- Korpas, M.; Holen, A.T. Operation planning of hydrogen storage connected to wind power operating in a power market. IEEE Trans. Energy Convers. 2006, 21, 742–749. [Google Scholar] [CrossRef]
- Kriett, P.O.; Salani, M. Optimal control of a residential microgrid. Energy 2012, 42, 321–330. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, B.; Zhang, T.; Guo, B. An Intelligent Control Strategy of Battery Energy Storage System for Microgrid Energy Management under Forecast Uncertainties. Int. J. Electrochem. Sci. 2014, 9, 4190–4204. [Google Scholar]
- Prodan, I.; Zio, E. A model predictive control framework for reliable microgrid energy management. Int. J. Electr. Power Energy Syst. 2014, 61, 399–409. [Google Scholar] [CrossRef]
- Su, W.; Wang, J.; Zhang, K.; Huang, A.Q. Model predictive control-based power dispatch for distribution system considering plug-in electric vehicle uncertainty. Electr. Power Syst. Res. 2014, 106, 29–35. [Google Scholar] [CrossRef]
- Gröwe-Kuska, N.; Heitsch, H.; Römisch, W. Scenario reduction and scenario tree construction for power management problems. In Proceedings of the 2003 IEEE Bologna Power Tech Conference Proceedings, Bologna, Italy, 23–26 June 2003; Volume 3.
- Mathiesen, P.; Kleissl, J. Evaluation of numerical weather prediction for intra-day solar forecasting in the continental United States. Sol. Energy 2011, 85, 967–977. [Google Scholar] [CrossRef]
- Manda, P.; Senjyu, T.; Naomitsu, U.; Funabashi, T. A neural network based several-hour-ahead electric load forecasting using similar days approach. Int. J. Electr. Power Energy Syst. 2006, 28, 367–373. [Google Scholar] [CrossRef]
- Foley, A.M.; Leahy, P.G.; Marvuglia, A.; McKeogh, E.J. Current methods and advances in forecasting of wind power generation. Renew. Energy 2012, 37, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zang, C.; Zeng, P.; Yu, H.; Li, H. Day-ahead hourly photovoltaic generation forecasting using extreme learning machine. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 779–783.
- Dong, Y.; Wang, J.; Jiang, H.; Wu, J. Short-term electricity price forecast based on the improved hybrid model. Energy Convers. Manag. 2011, 52, 2987–2995. [Google Scholar] [CrossRef]
- Aggarwal, S.K.; Saini, L.M.; Kumar, A. Electricity price forecasting in deregulated markets: A review and evaluation. Int. J. Electr. Power Energy Syst. 2009, 31, 13–22. [Google Scholar] [CrossRef]
- Vagropoulos, S.I.; Kardakos, E.G.; Simoglou, C.K.; Bakirtzis, A.G.; Catalao, J.P.S. ANN-based scenario generation methodology for stochastic variables of electric power systems. Electr. Power Syst. Res. 2016, 134, 9–18. [Google Scholar] [CrossRef]
- Holjevac, N.; Capuder, T.; Kuzle, I. Adaptive control for evaluation of flexibility benefits in microgrid systems. Energy 2015, 92, 487–504. [Google Scholar] [CrossRef]
- Alabedin, A.M.Z.; El-Saadany, E.F.; Salama, M.M.A. Generation scheduling in Microgrids under uncertainties in power generation. In Proceedings of the 2012 IEEE Electrical Power and Energy Conference (EPEC), London, ON, Canada, 10–12 October 2012; pp. 133–138.
- Ding, Z. Optimal Operation Of Microgrid under a Stochastic Environment. Ph.D. Thesis, The University of Texas at Arlington, Arlington, TX, USA, 2015. [Google Scholar]
- Rezaei, N.; Kalantar, M. A novel hierarchical energy management of a renewable microgrid considering static and dynamic frequency. J. Renew. Sustain. Energy 2015, 7. [Google Scholar] [CrossRef]
- Liu, P.; Fu, Y.; Marvasti, A.K. Multi-stage Stochastic Optimal Operation of Energy-efficient Building with Combined Heat and Power System. Electr. Power Compon. Syst. 2014, 42, 327–338. [Google Scholar] [CrossRef]
- Zanjani, M.K.; Nourelfath, M.; Ait-Kadi, D. A multi-stage stochastic programming approach for production planning with uncertainty in the quality of raw materials and demand. Int. J. Product. Res. 2010, 48, 4701–4723. [Google Scholar] [CrossRef]
- Lucia, S.; Engell, S. Multi-stage and two-stage robust nonlinear model predictive control. In Proceedings of the Nonlinear Model Predictive Control, Leeuwenhorst, The Netherlands, 23–27 August 2012; Volume 4, pp. 181–186.
- Xu, Y.; Zhang, W.; Liu, W. Distributed Dynamic Programming-Based Approach for Economic Dispatch in Smart Grids. IEEE Trans. Ind. Inform. 2015, 11, 166–175. [Google Scholar] [CrossRef]
- Almassalkhi, M.R.; Hiskens, I.A. Model-Predictive Cascade Mitigation in Electric Power Systems with Storage and Renewables-Part I: Theory and Implementation. IEEE Trans. Power Syst. 2015, 30, 67–77. [Google Scholar] [CrossRef]
- Wang, R.; Wang, P.; Xiao, G.; Gong, S. Power demand and supply management in microgrids with uncertainties of renewable energies. Int. J. Electr. Power Energy Syst. 2014, 63, 260–269. [Google Scholar] [CrossRef]
- Tsikalakis, A.G.; Hatziargyriou, N.D. Centralized Control for Optimizing Microgrids Operation. IEEE Trans. Energy Convers. 2008, 23, 241–248. [Google Scholar] [CrossRef]
- Belgiums Electricity Transmission System Operator Website. 2014. Available online: http://www.elia.be (accessed on 30 April 2016).
- Zhang, Y.; Zhang, T.; Wang, R.; Liu, Y.; Guo, B. Optimal operation of a smart residential microgrid based on model predictive control by considering uncertainties and storage impacts. Sol. Energy 2015, 122, 1052–1065. [Google Scholar] [CrossRef]
- Castronuovo, E.; Lopes, J. On the optimization of the daily operation of a wind-hydro power plant. IEEE Trans. Power Syst. 2004, 19, 1599–1606. [Google Scholar] [CrossRef]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Symposium on Computer Aided Control Systems Design, Taipei, Taiwan, 4 September 2004; pp. 284–289.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values |
|---|---|
| , , , | 1.5%, 5%, 0.8%, 2% |
| , , , | 7%, 35%, 4.5%, 9% |
| 0.0135 ($/kWh) | |
| 0.5 ($/kWh) | |
| 0.01 ($/kWh) | |
| , | 2 (kW), 20 (kW) |
| , | 4 (kW), 40 (kW) |
| , | 3 (kW), 30 (kW) |
| , | 15 (kWh), 75 (kWh) |
| , | 15 (kW) |
| , | 0.11 ($), 0.11 ($) |
| , | 0.2 ($), 0.2 ($) |
| , | 0.2 ($), 0.2 ($) |
| , , | 0.00011 ($/), 0.0583 ($/kWh), 0.52 ($/h) |
| , , | 0.00011 ($/), 0.034 ($/kWh), 1.47 ($/h) |
| , , | 0.00011 ($/), 0.046 ($/kWh), 1.00 ($/h) |
| , | 0.95, 0.95 |
| Mode | SP | RHC | SPRHC | |
|---|---|---|---|---|
| Grid-connect | average | 23.6052 | 23.1895 | 22.7472 |
| min | 15.6924 | 15.7484 | 15.4576 | |
| max | 33.2349 | 33.6729 | 33.3395 | |
| island | average | 69.8766 | 72.5388 | 63.1397 |
| min | 62.7694 | 57.4909 | 51.3237 | |
| max | 80.8760 | 86.9729 | 81.0506 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Zang, C.; Zeng, P.; Yu, H. Combined Two-Stage Stochastic Programming and Receding Horizon Control Strategy for Microgrid Energy Management Considering Uncertainty. Energies 2016, 9, 499. https://doi.org/10.3390/en9070499
Li Z, Zang C, Zeng P, Yu H. Combined Two-Stage Stochastic Programming and Receding Horizon Control Strategy for Microgrid Energy Management Considering Uncertainty. Energies. 2016; 9(7):499. https://doi.org/10.3390/en9070499
Chicago/Turabian StyleLi, Zhongwen, Chuanzhi Zang, Peng Zeng, and Haibin Yu. 2016. "Combined Two-Stage Stochastic Programming and Receding Horizon Control Strategy for Microgrid Energy Management Considering Uncertainty" Energies 9, no. 7: 499. https://doi.org/10.3390/en9070499