
A Novel Single Winding Structure and Closed Loop Control of the Suspension Force Vector of Bearingless Permanent Magnet Synchronous Motors

Abstract
:1. Introduction
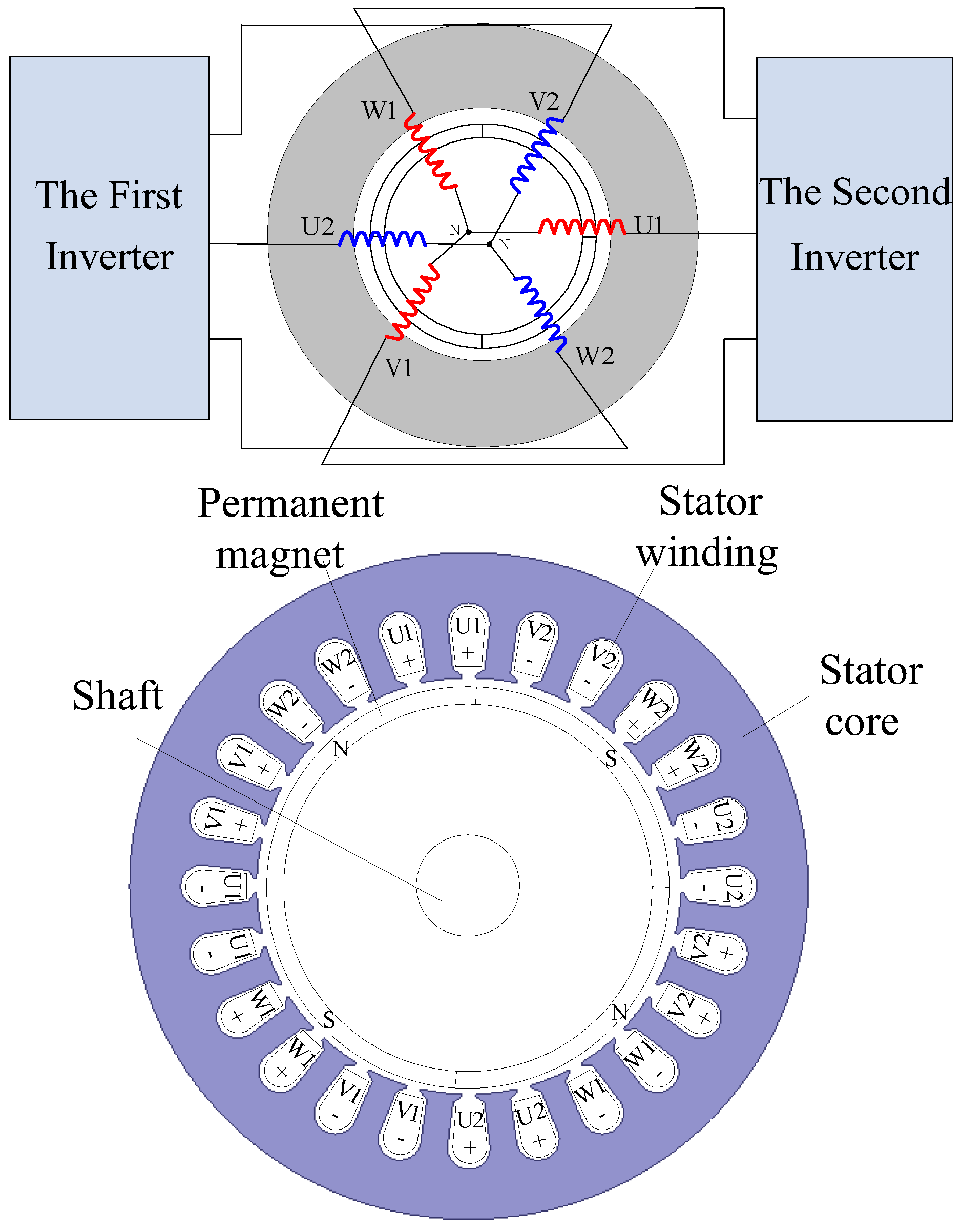
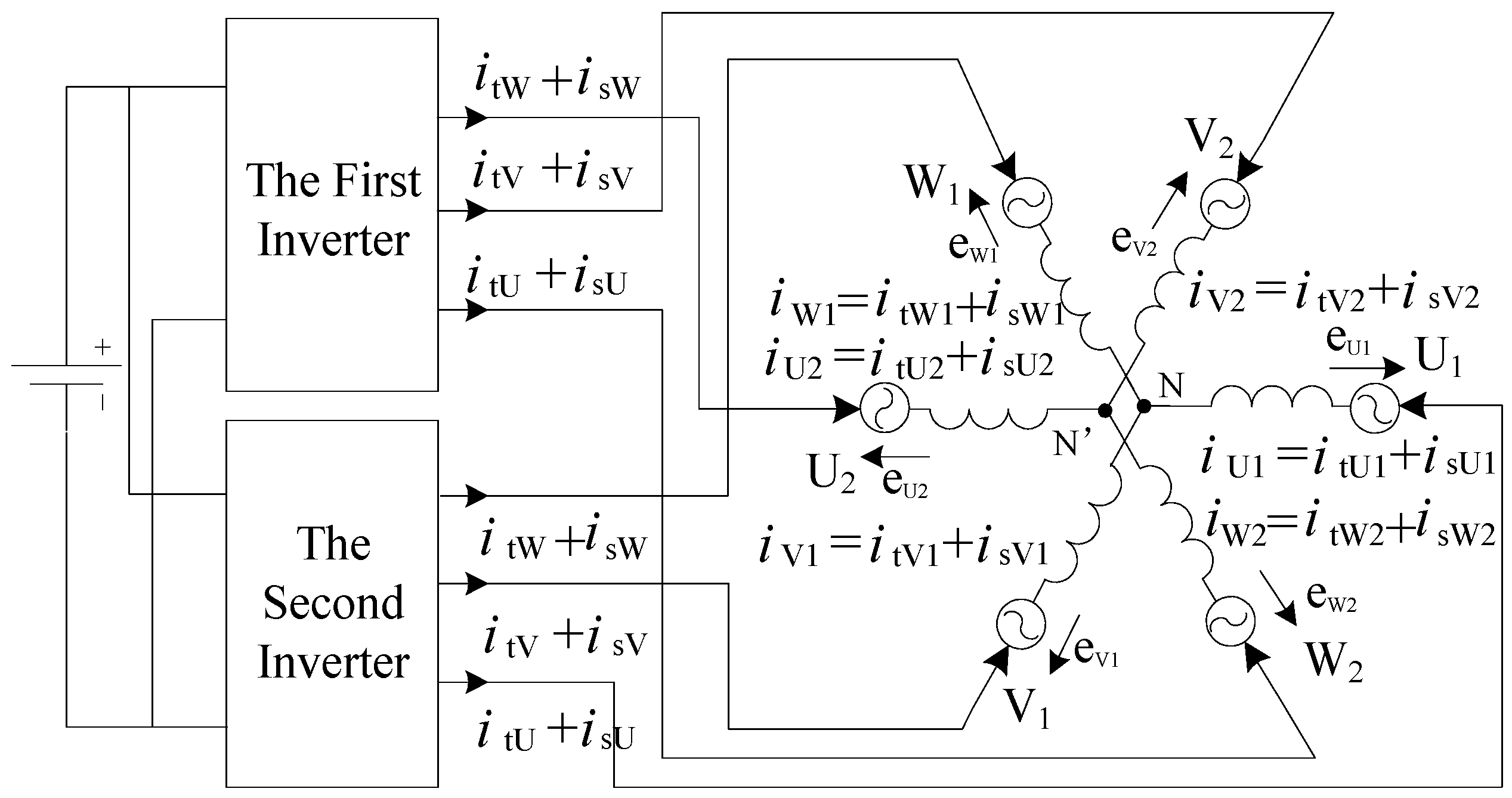
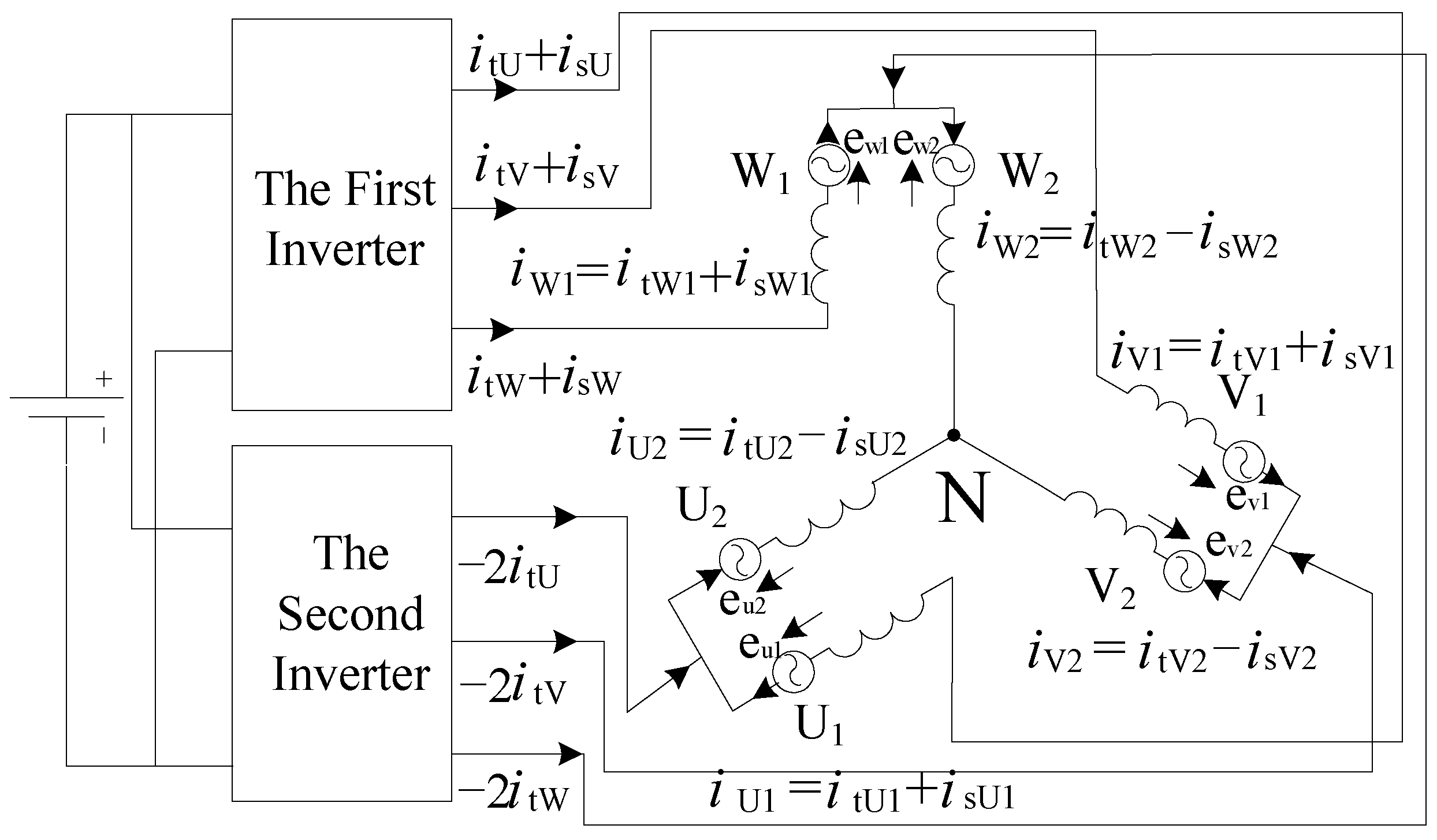
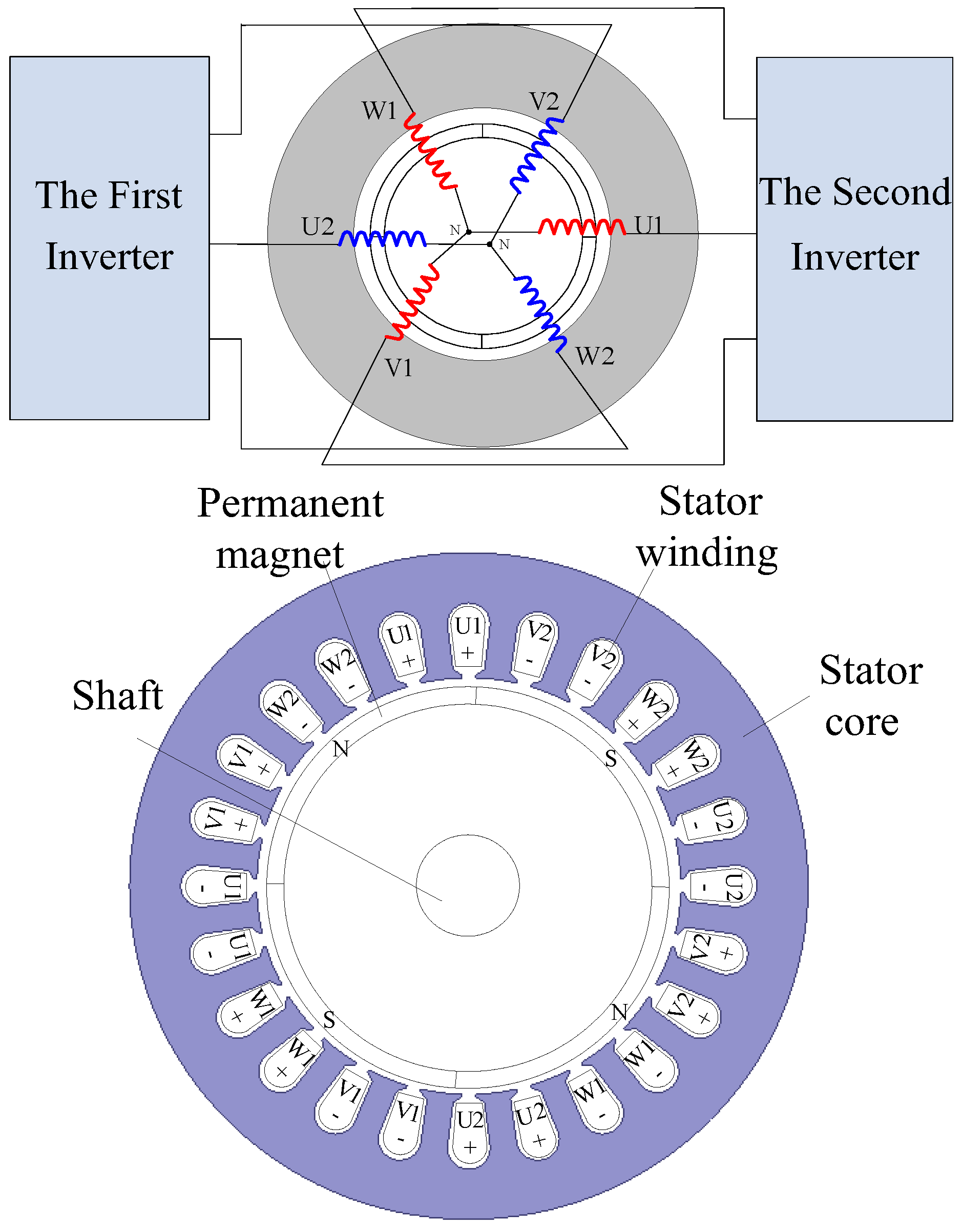
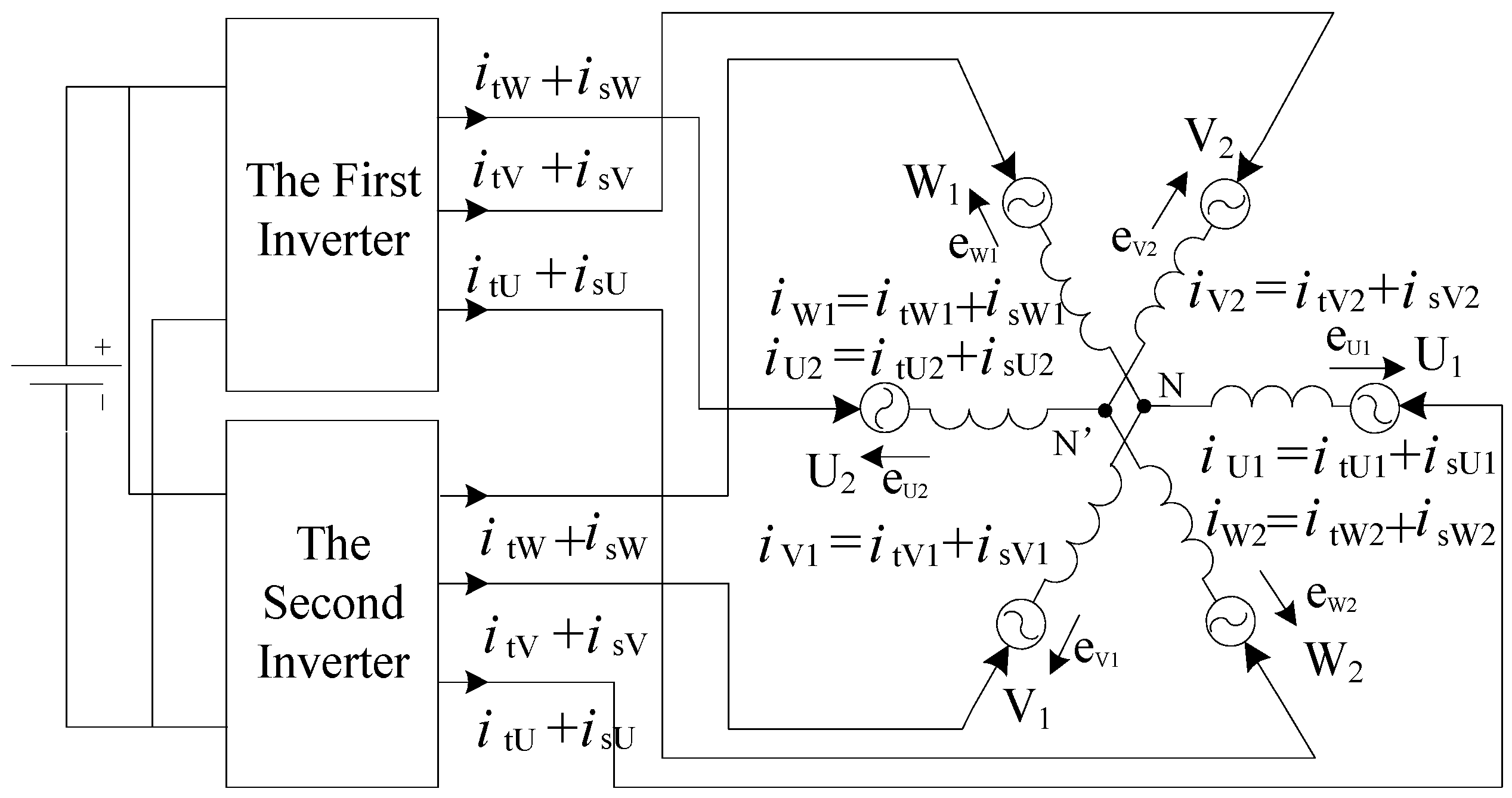
2. Improved Winding Structure and Operation Principle
3. The Analytical Expression of Suspension Force and Torque
3.1. Analytical Model of Suspension Force
3.2. Analytical Model of Torque
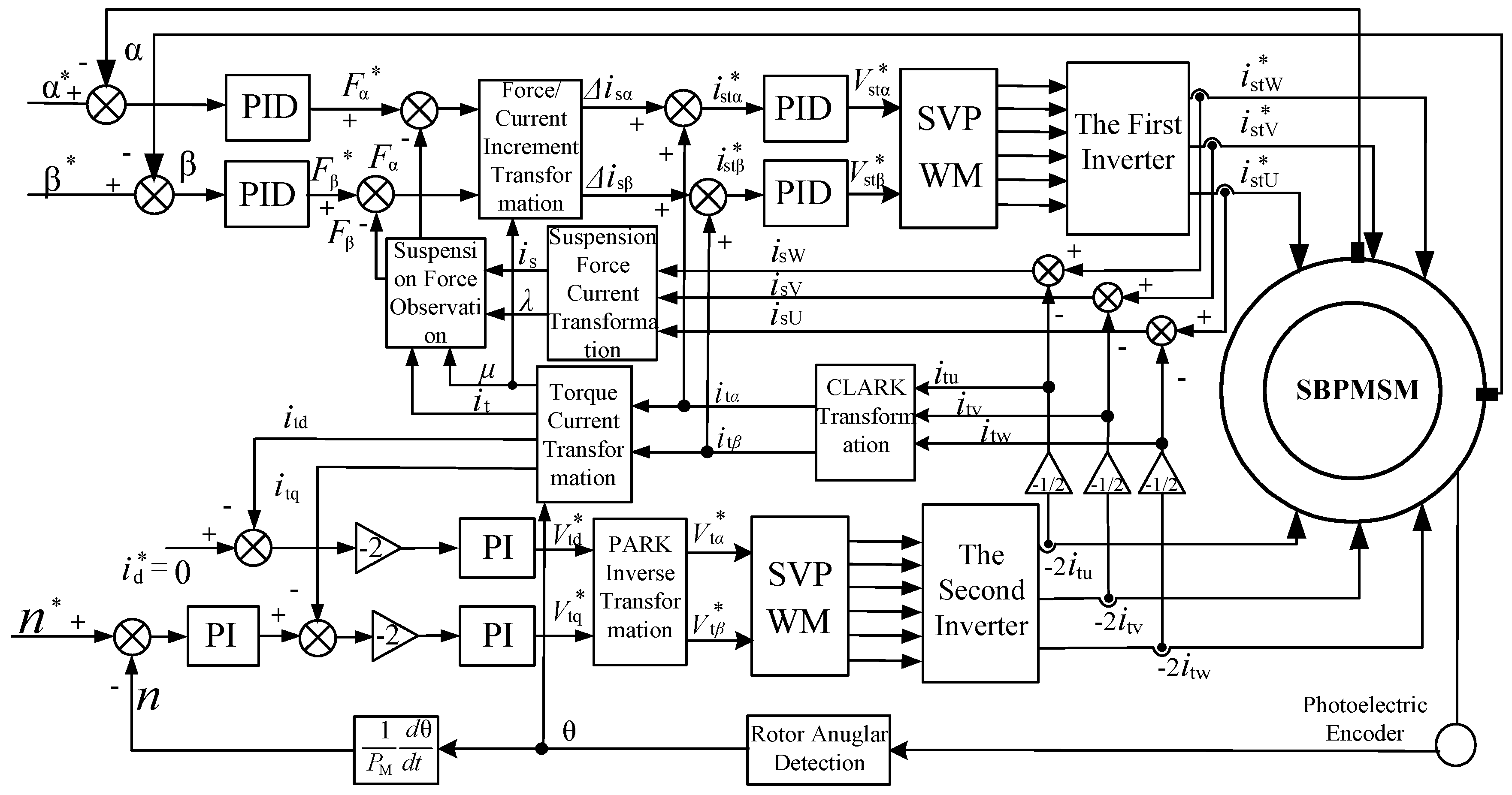
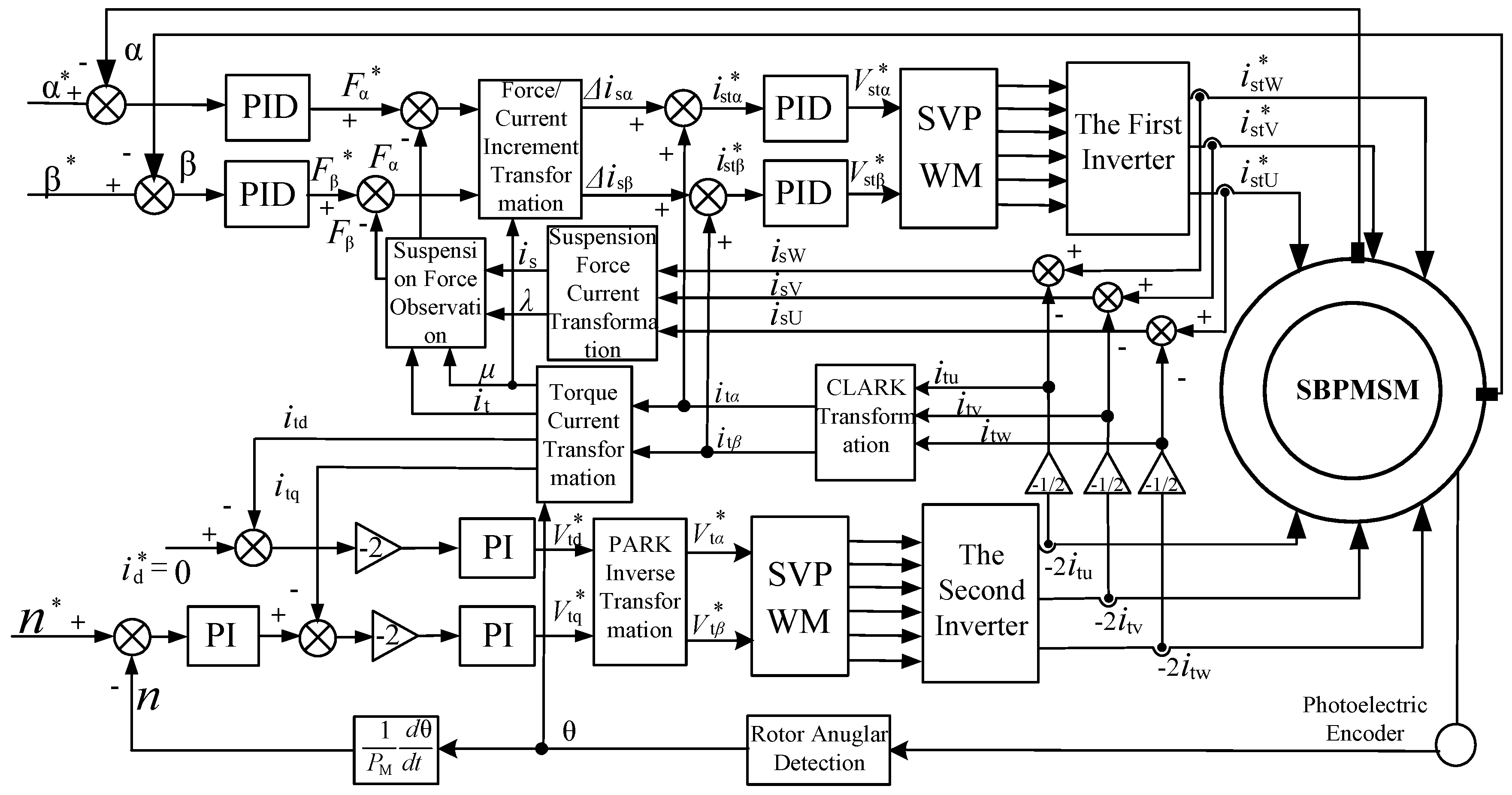
4. Closed Loop Control of Suspension Force Vector of SBPMSM
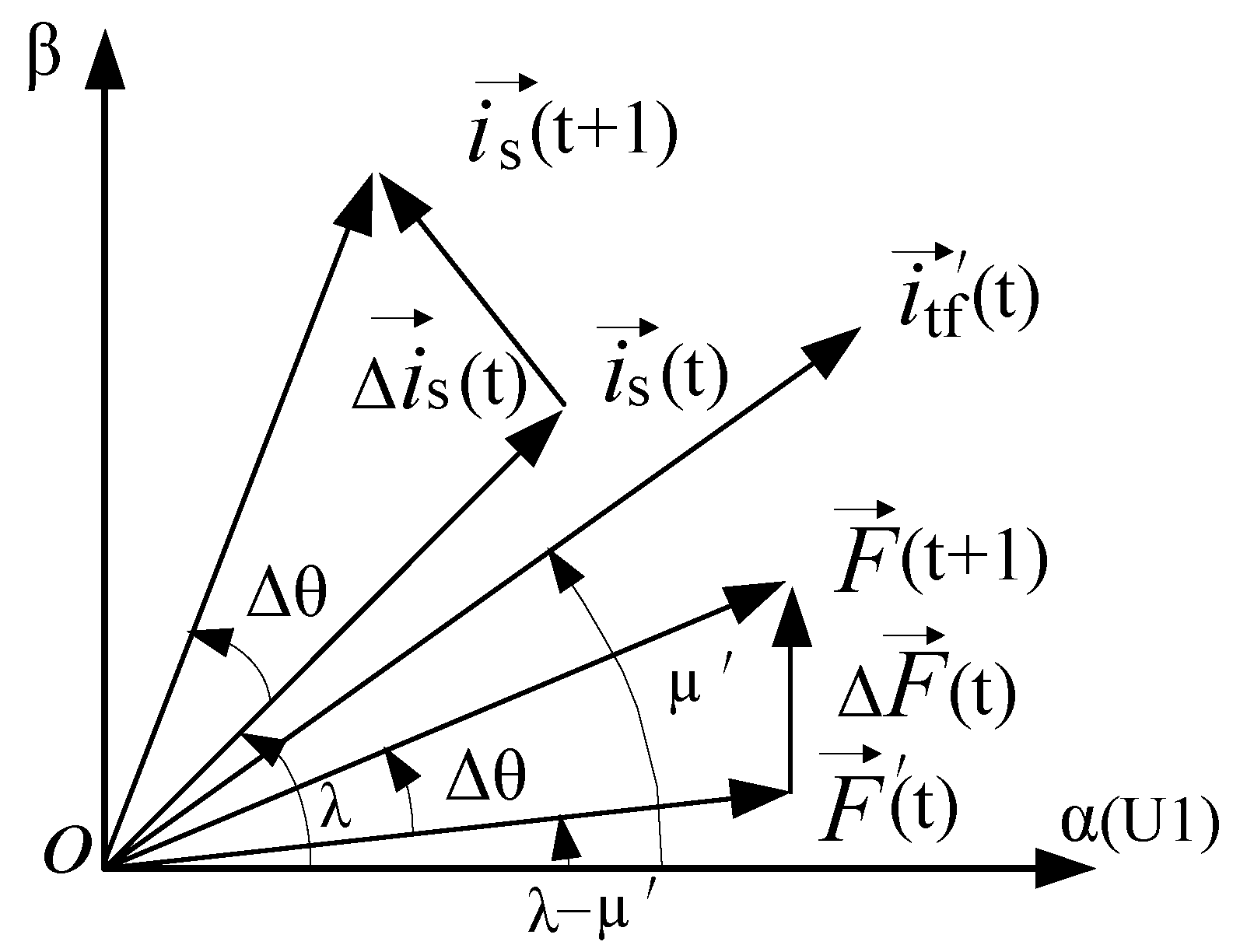
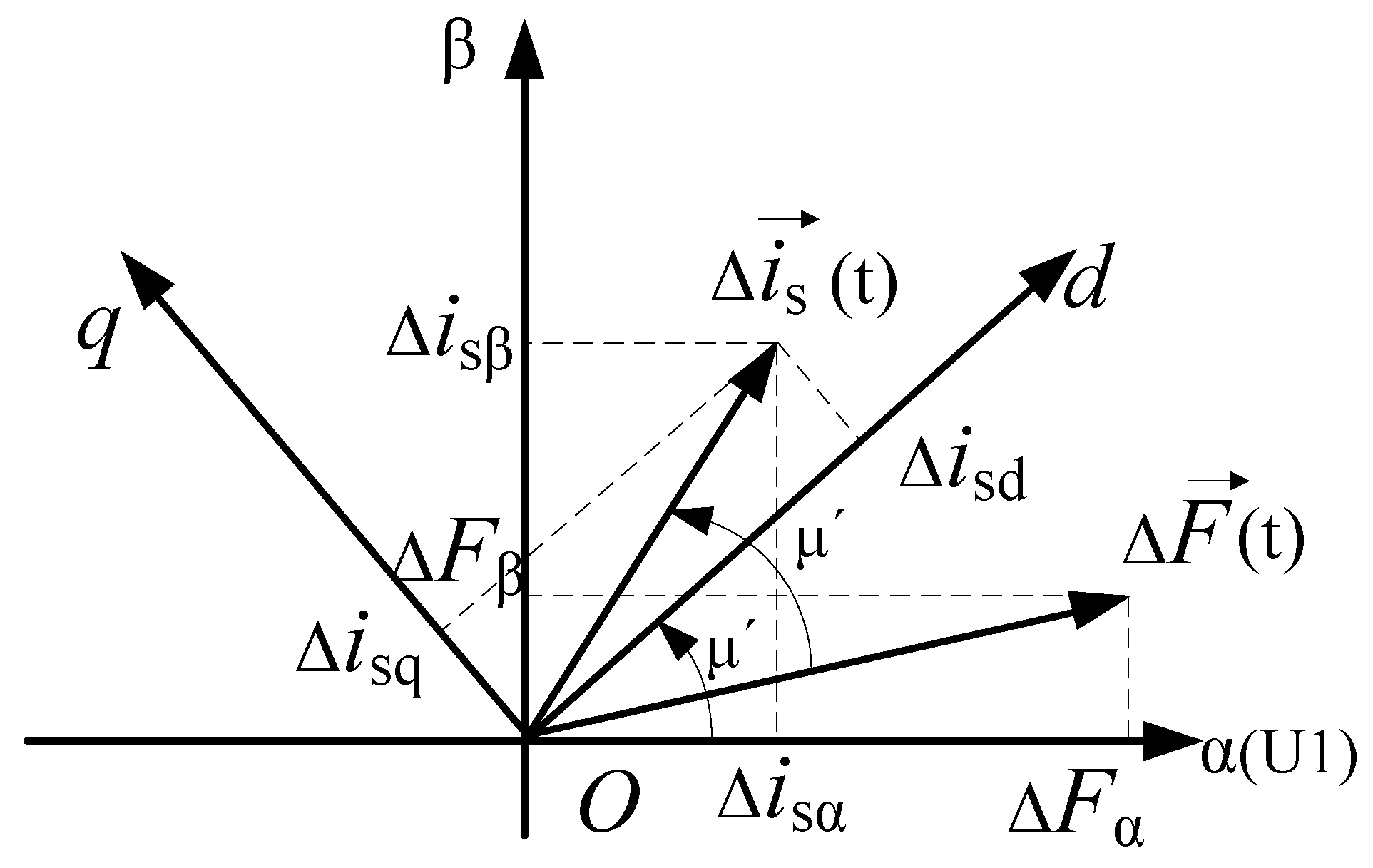
4.1. Principle of Closed Loop Control of Suspension Force Vector
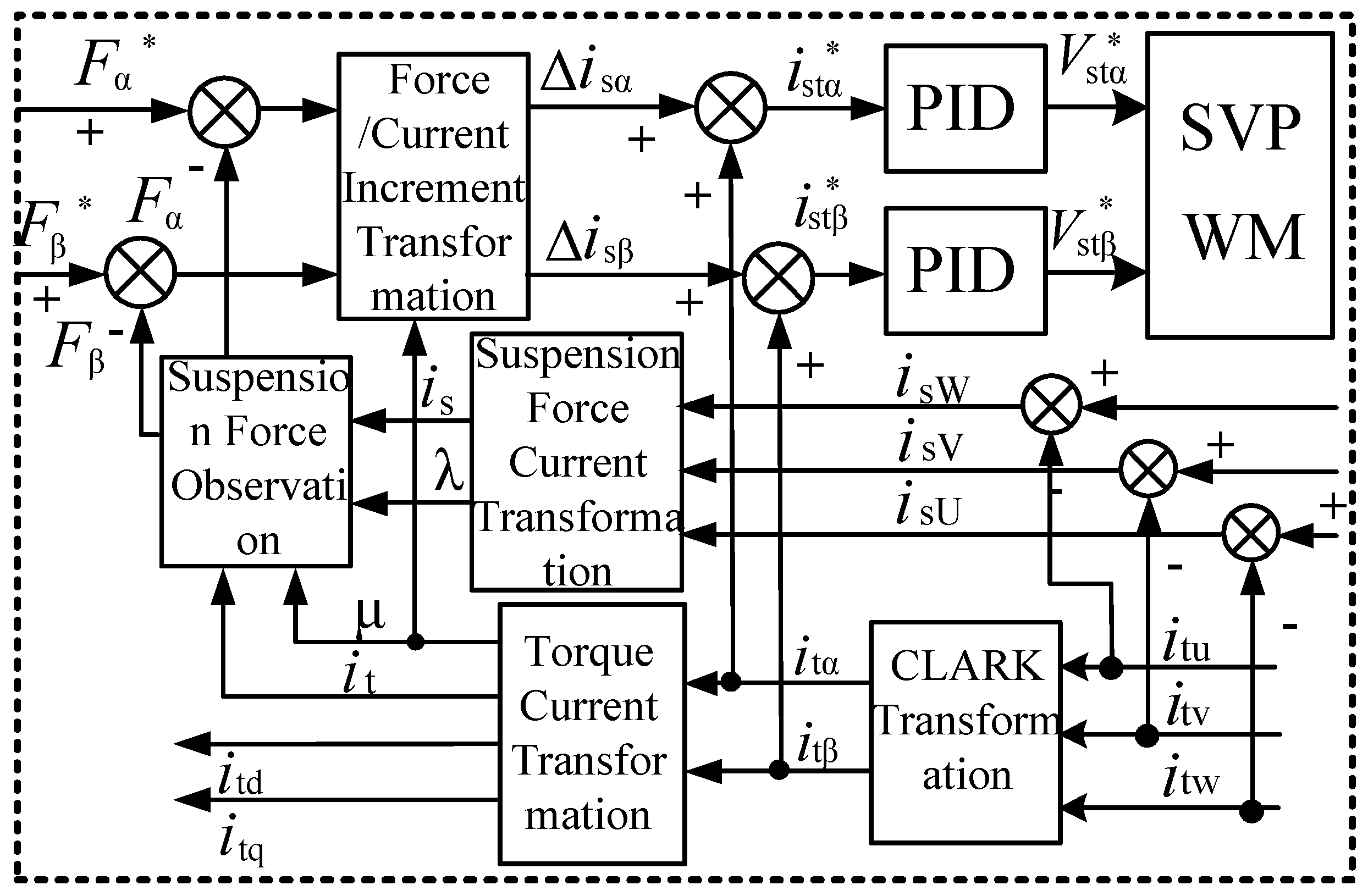
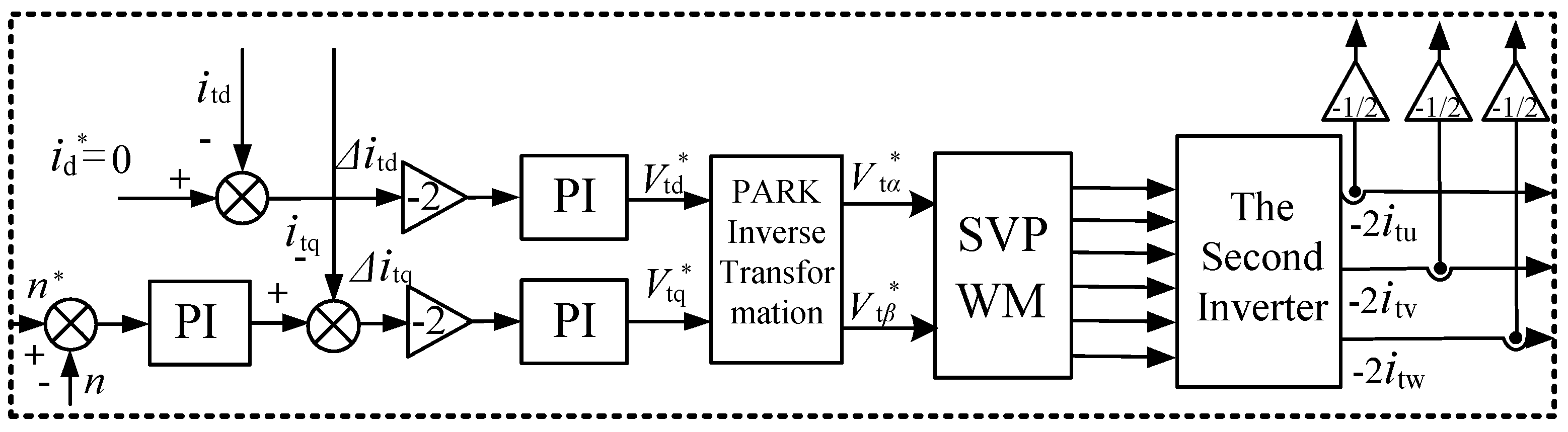
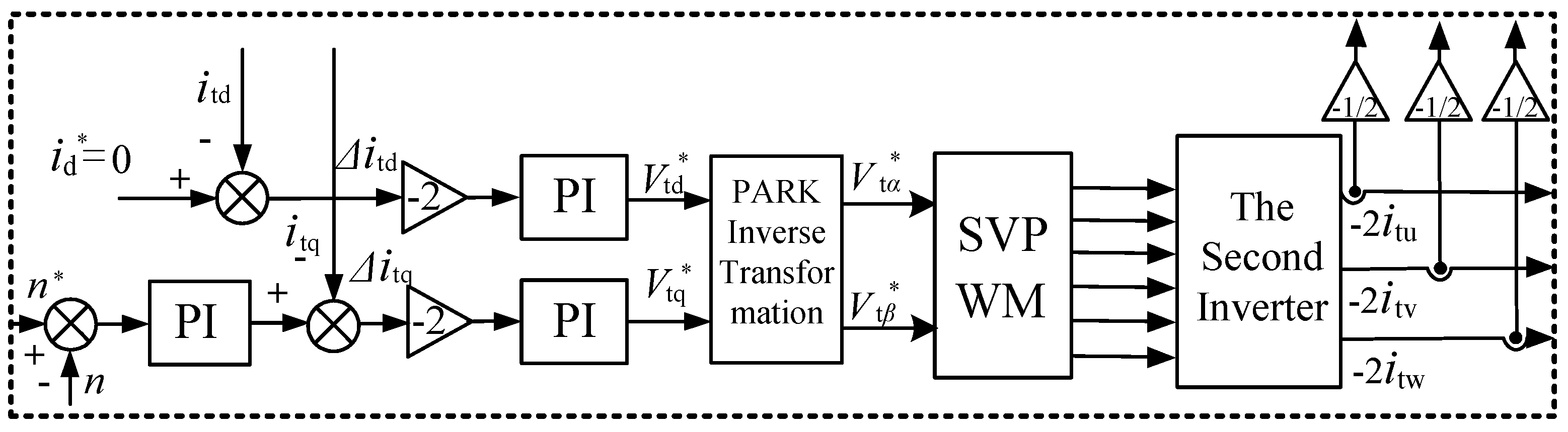
4.2. Regulation System
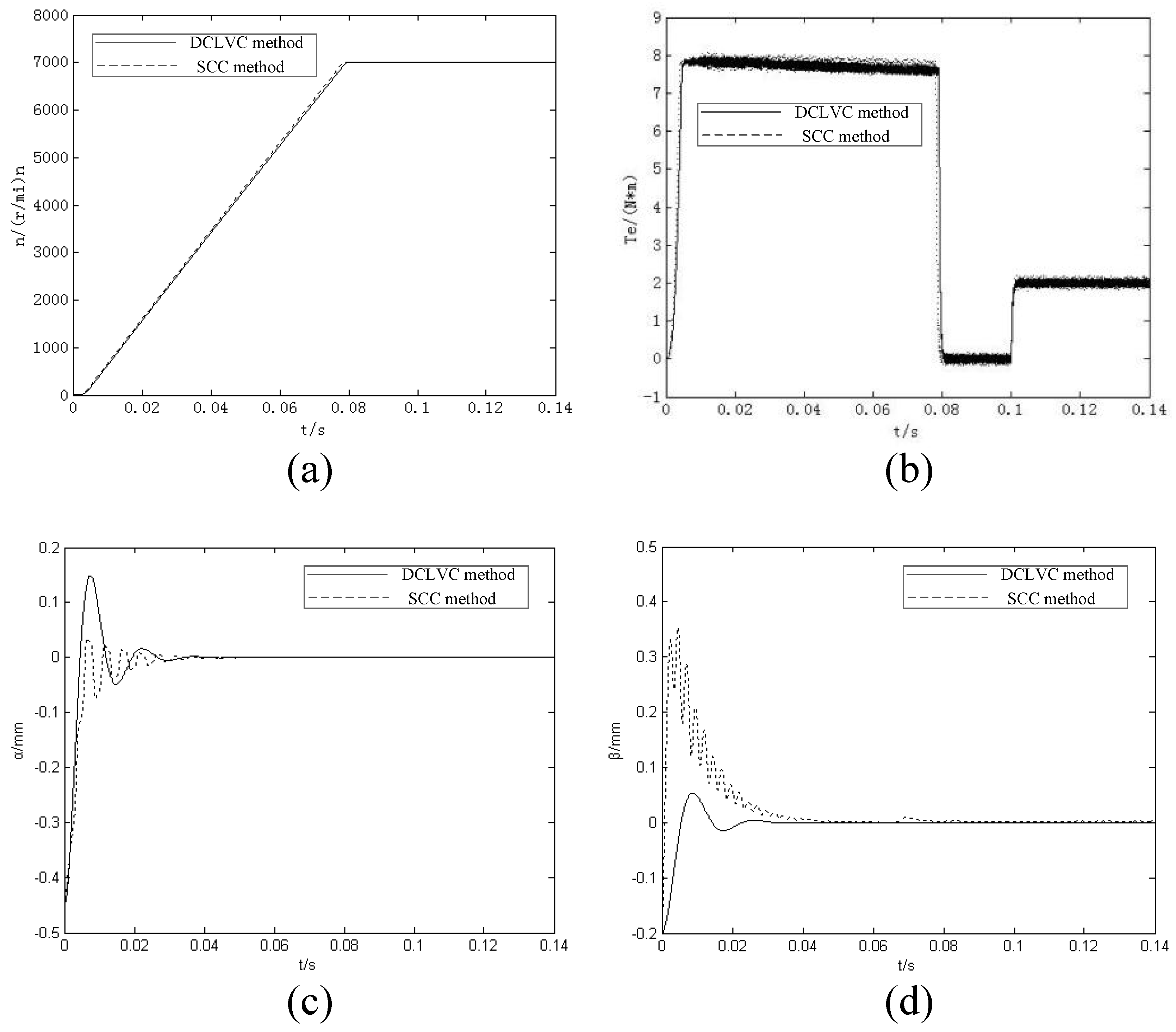
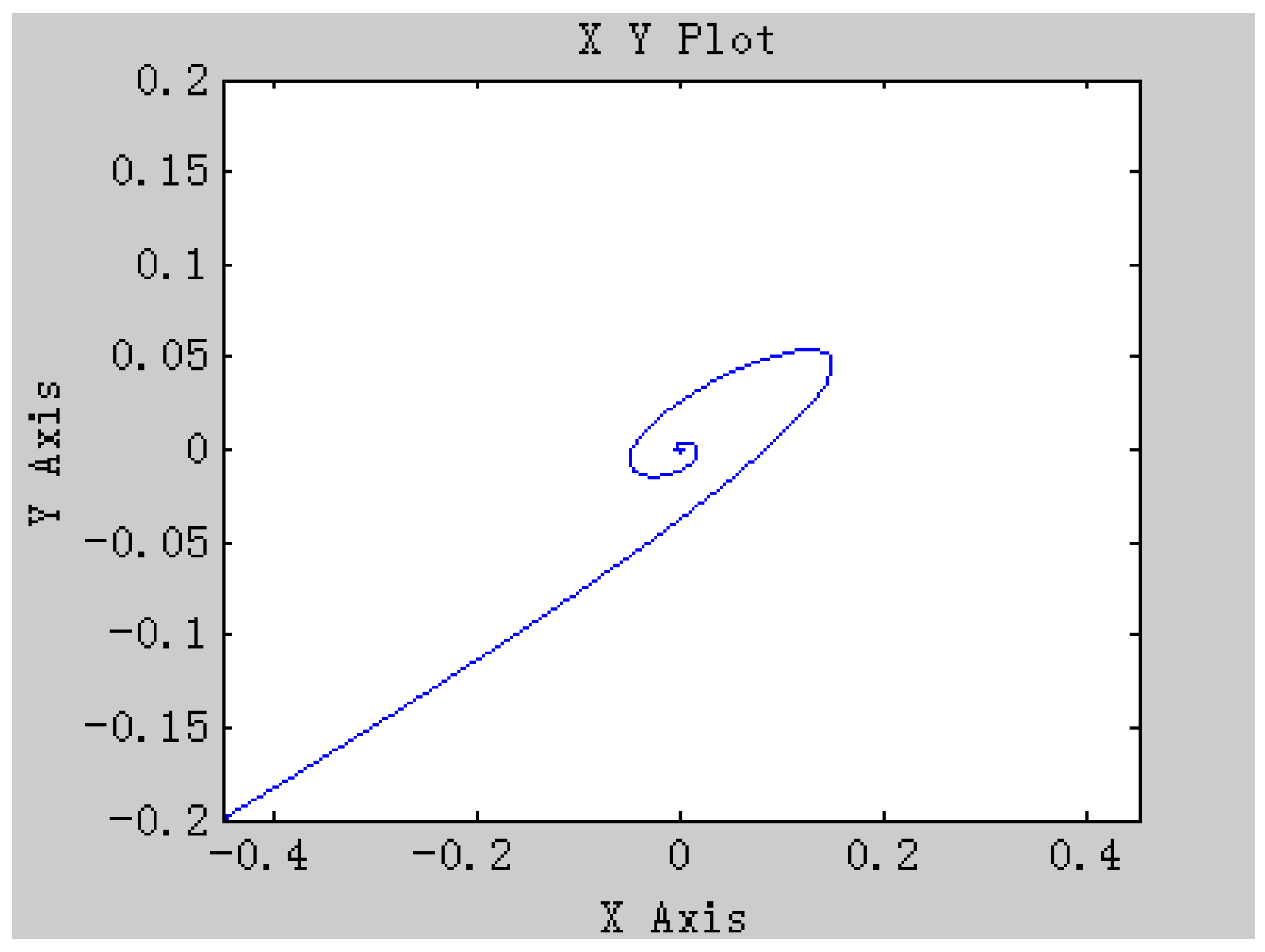
5. Simulation and Experiment
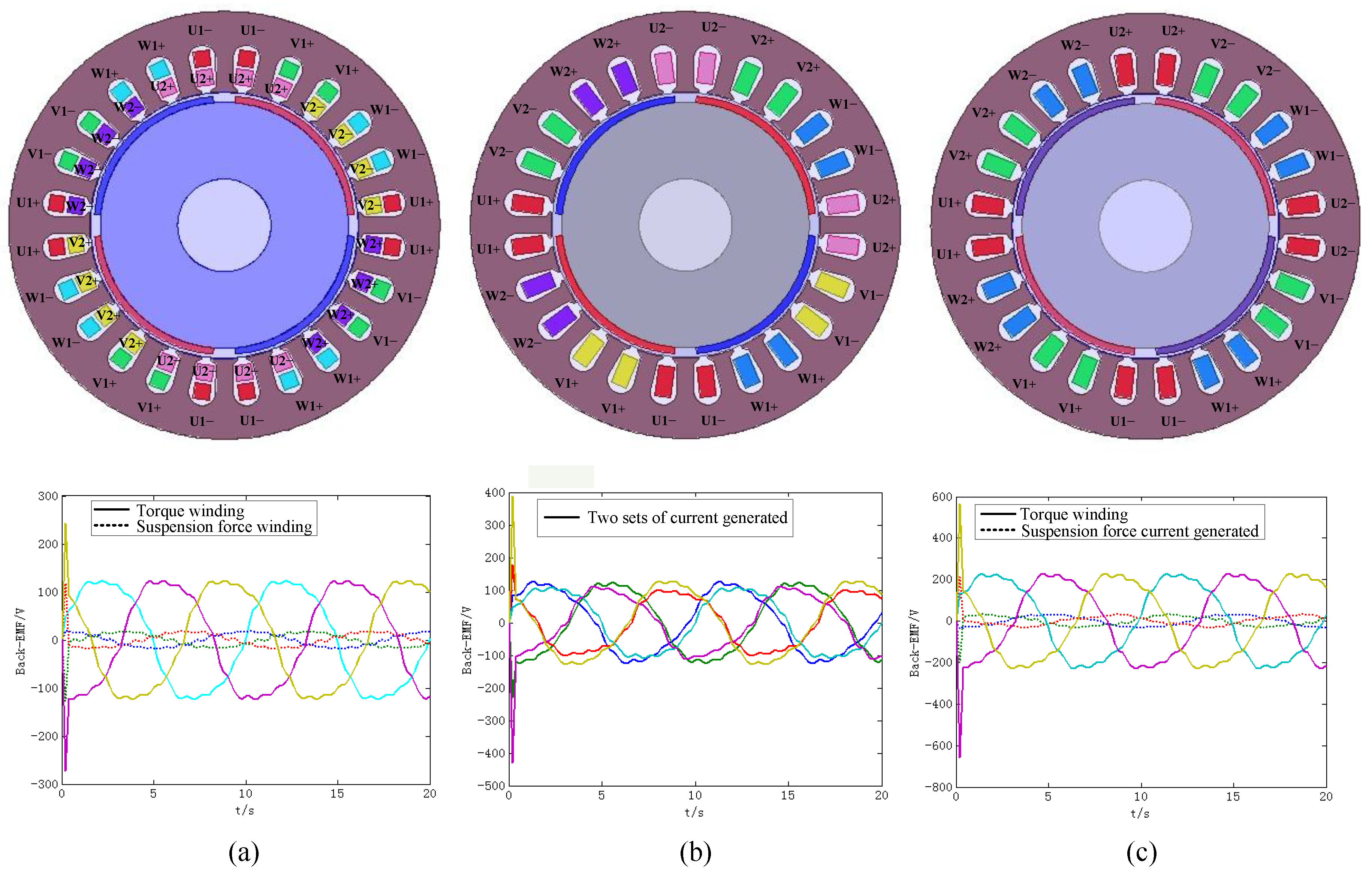
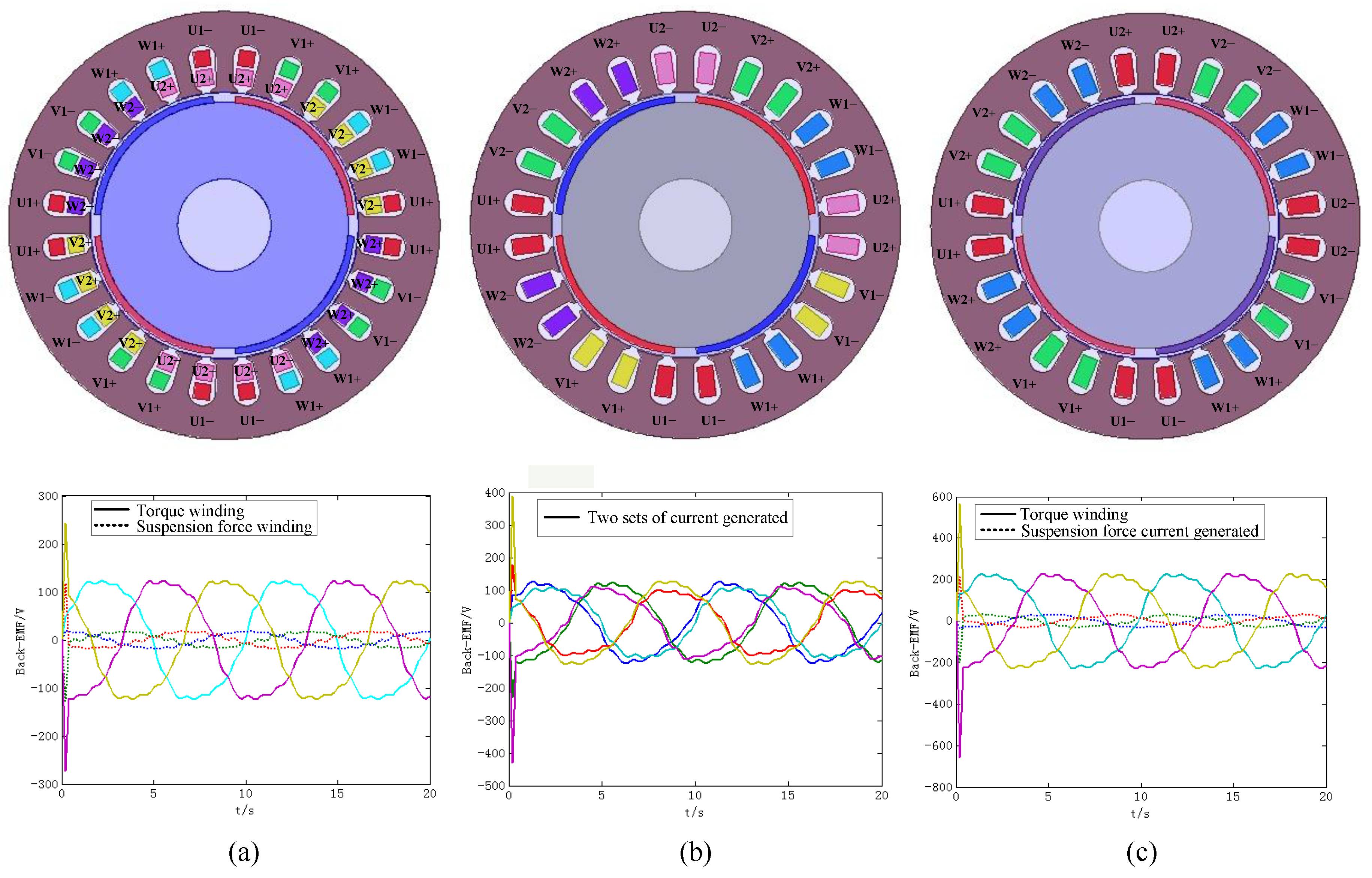
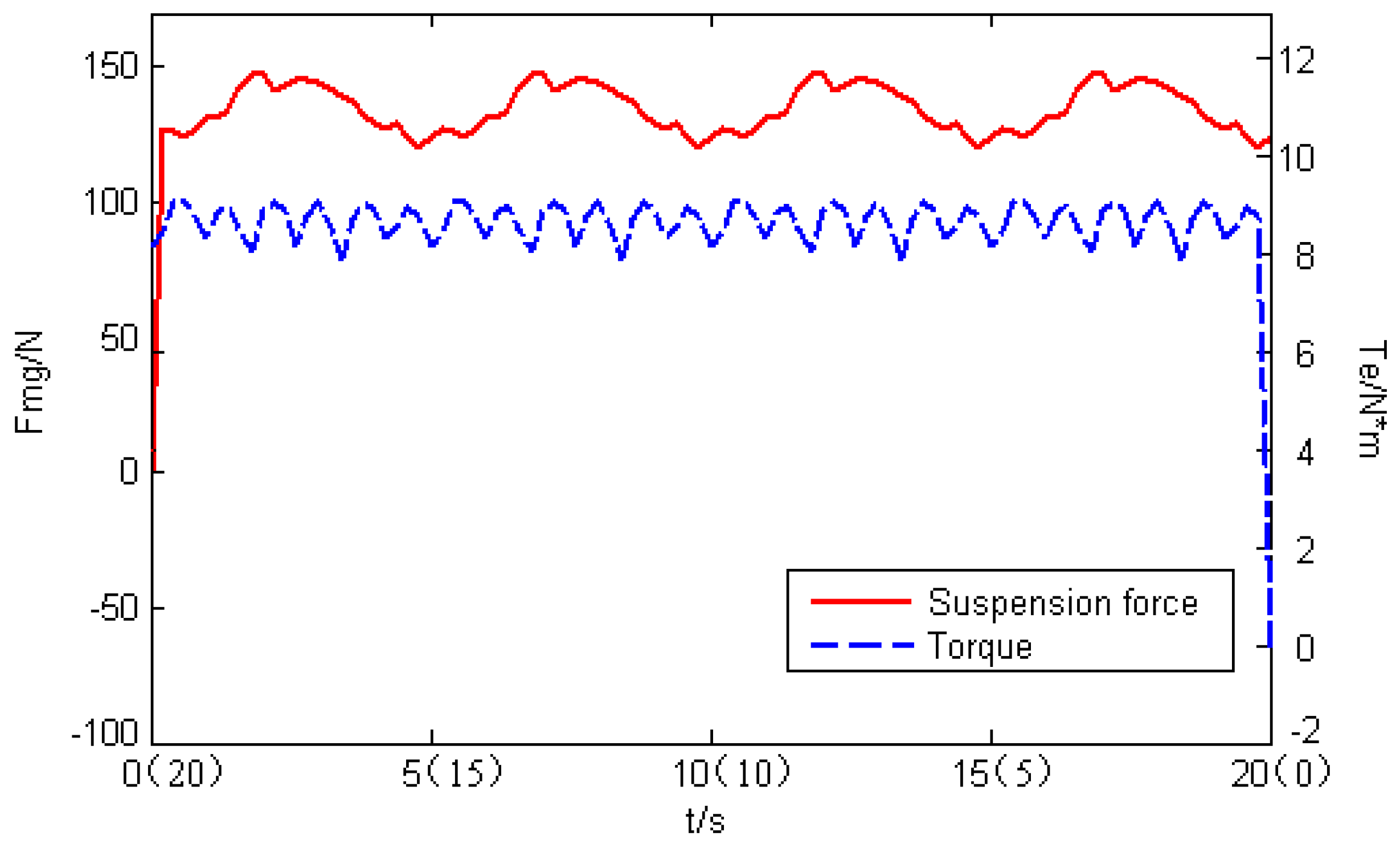
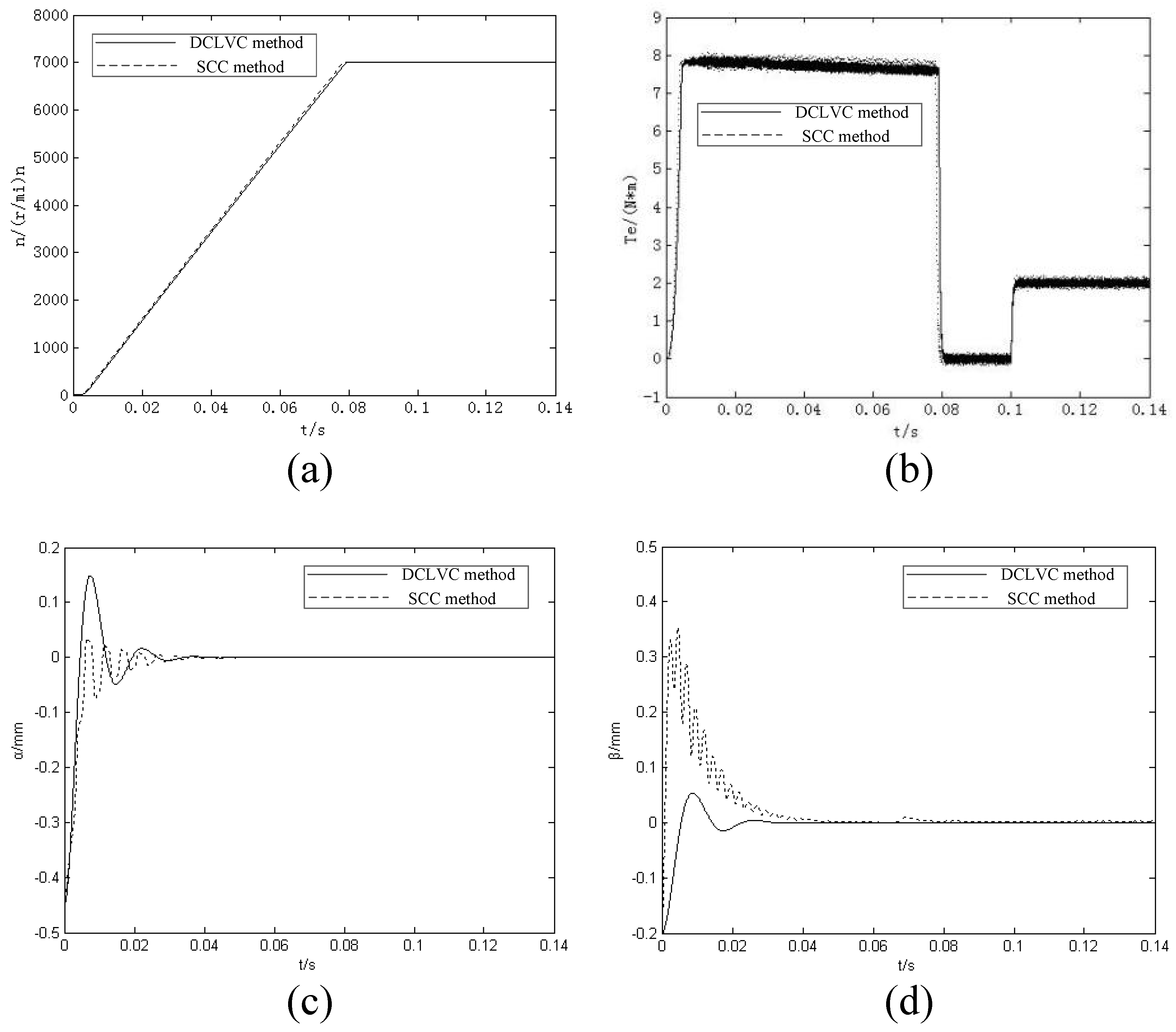
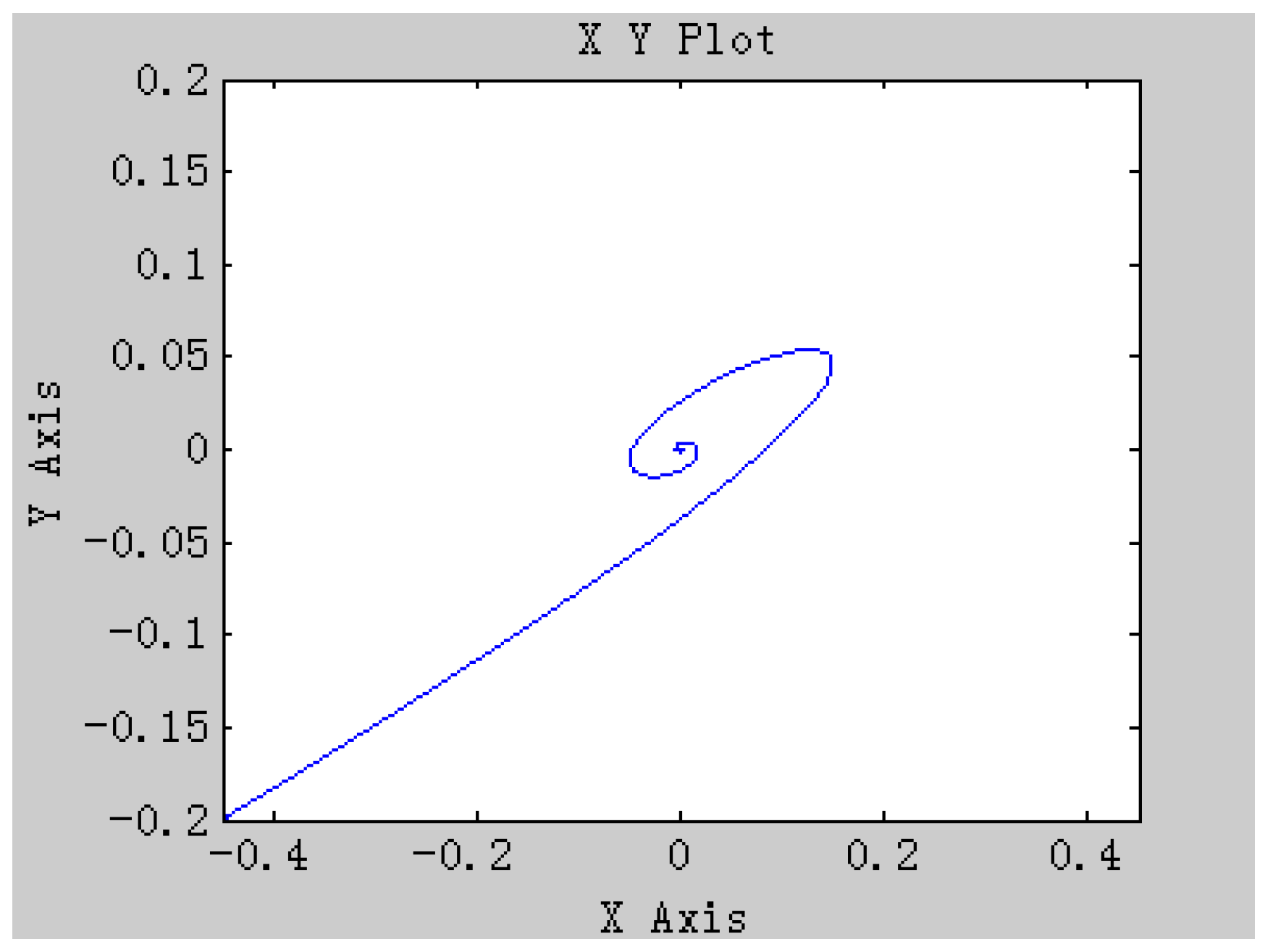
5.1. Analysis of Simulation Results
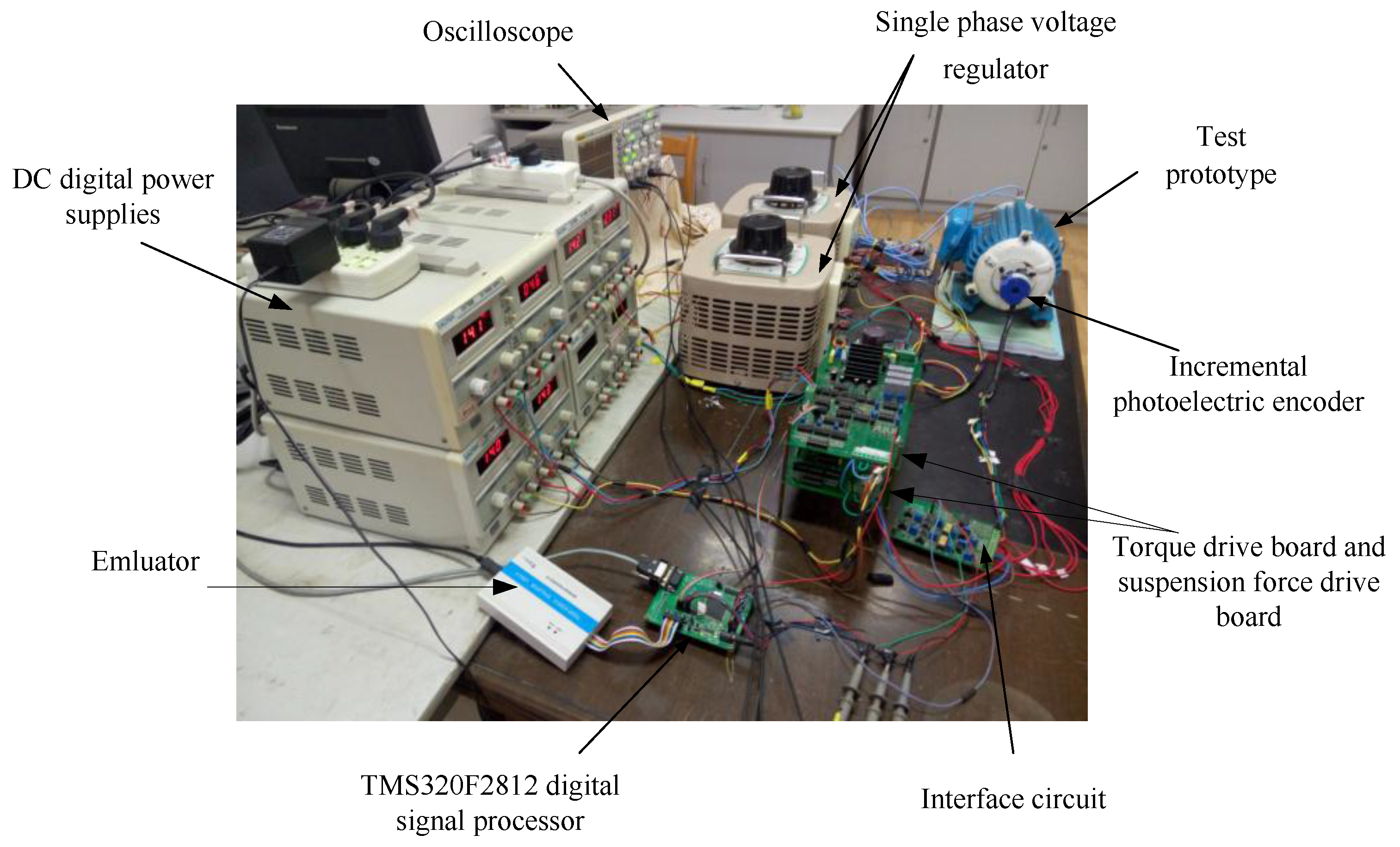
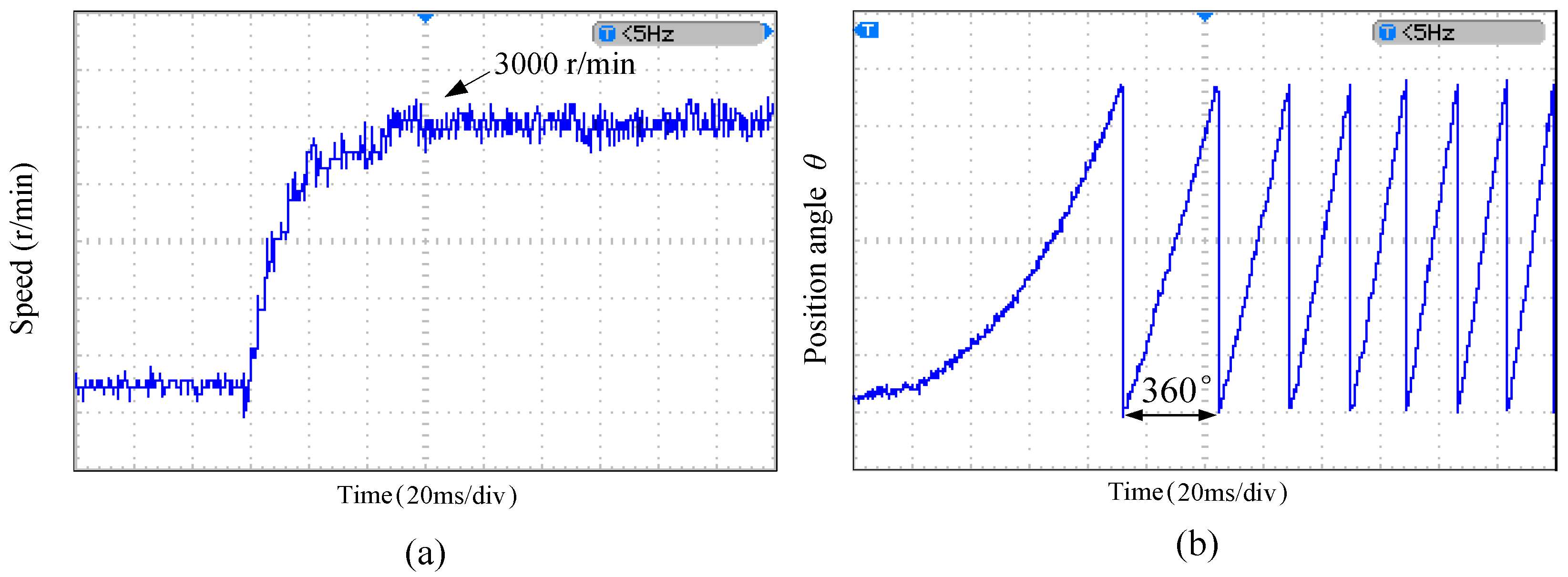
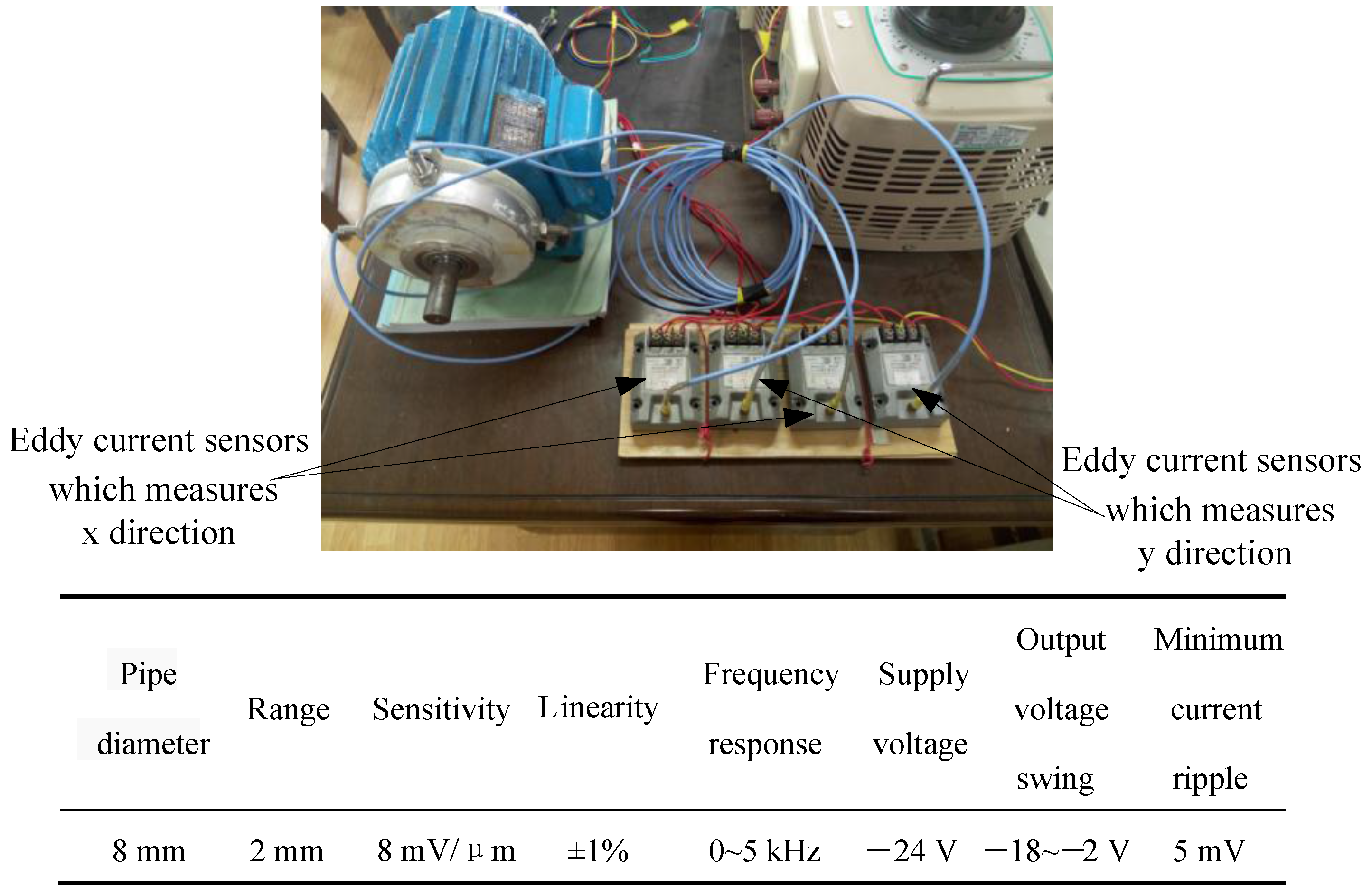
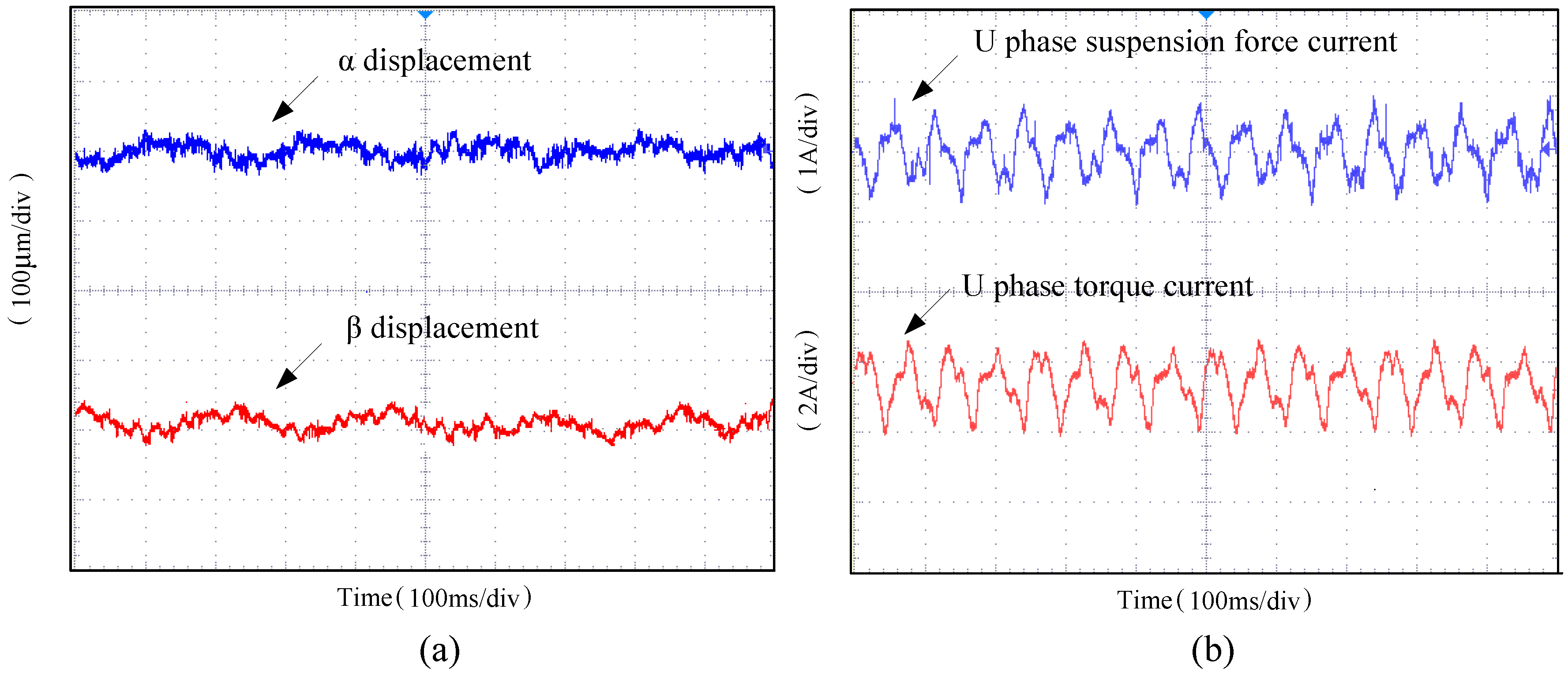
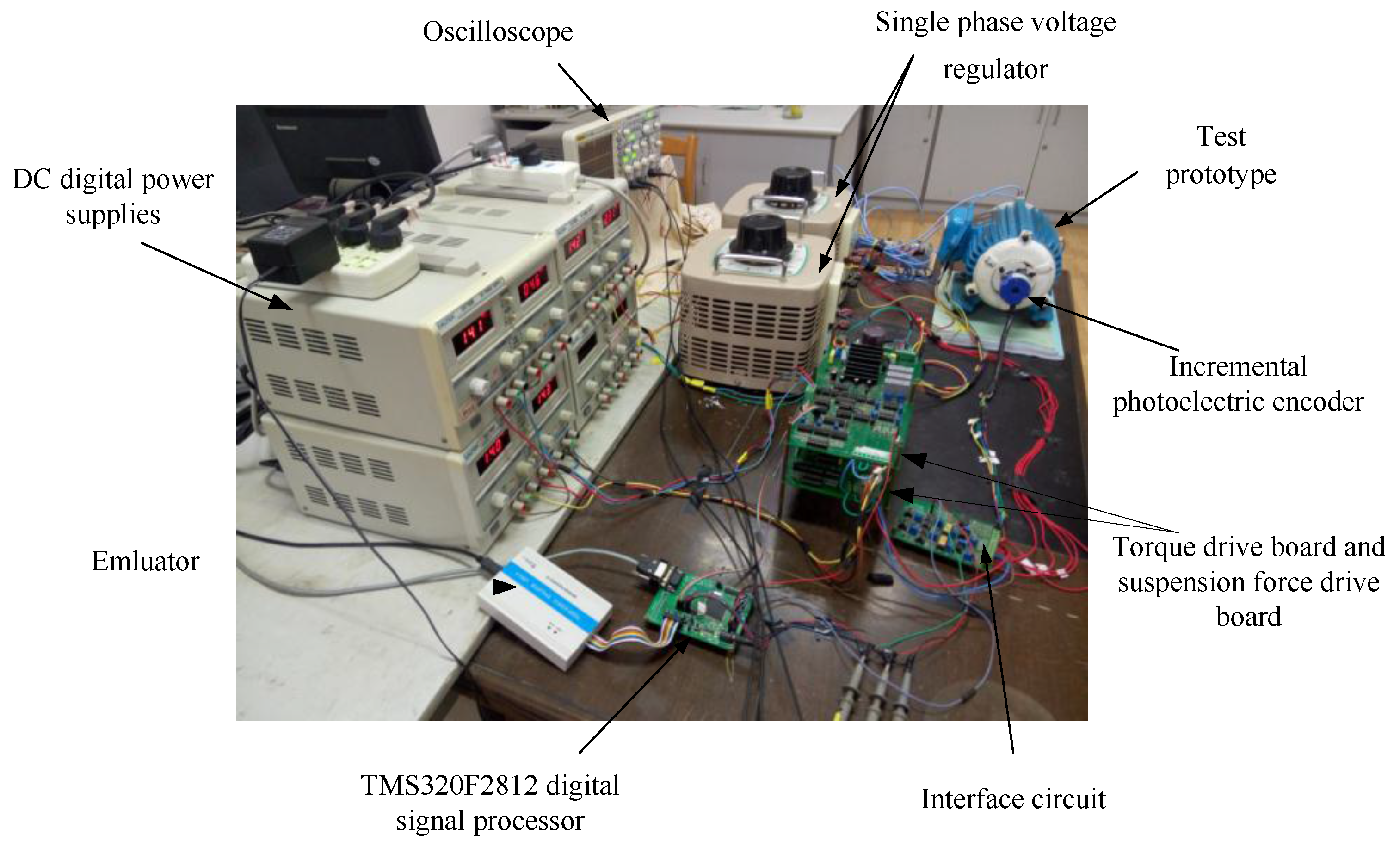
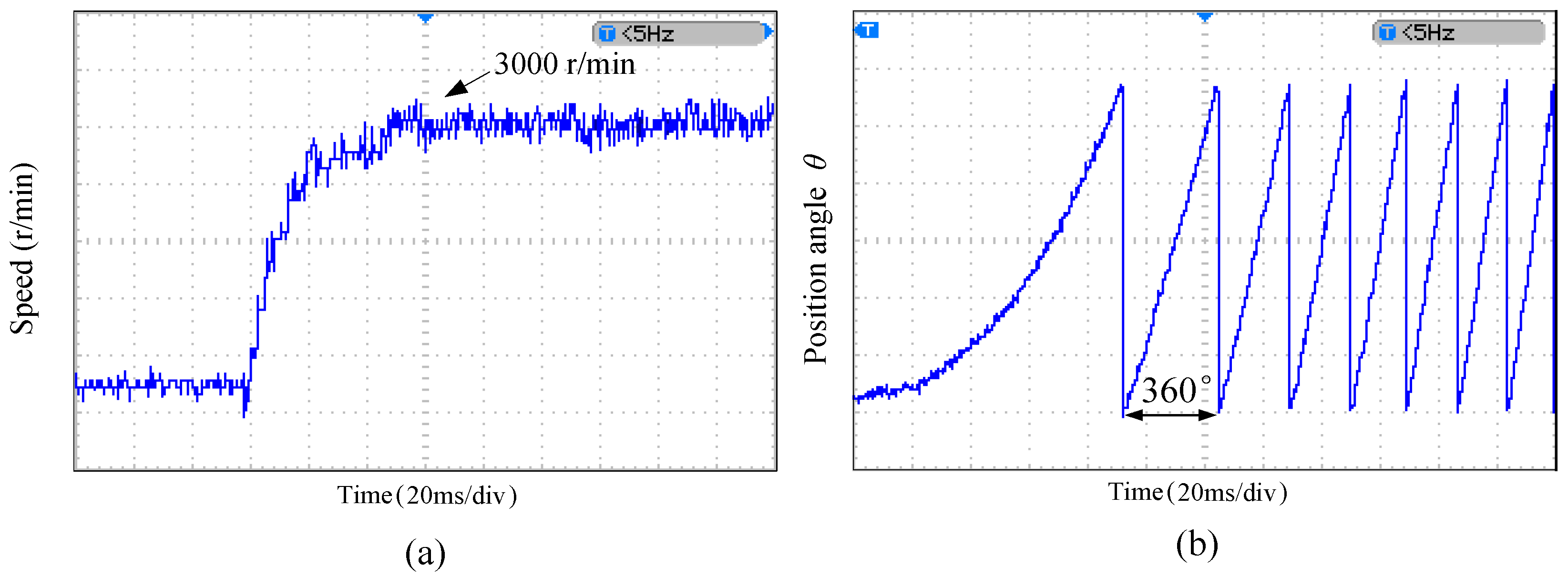
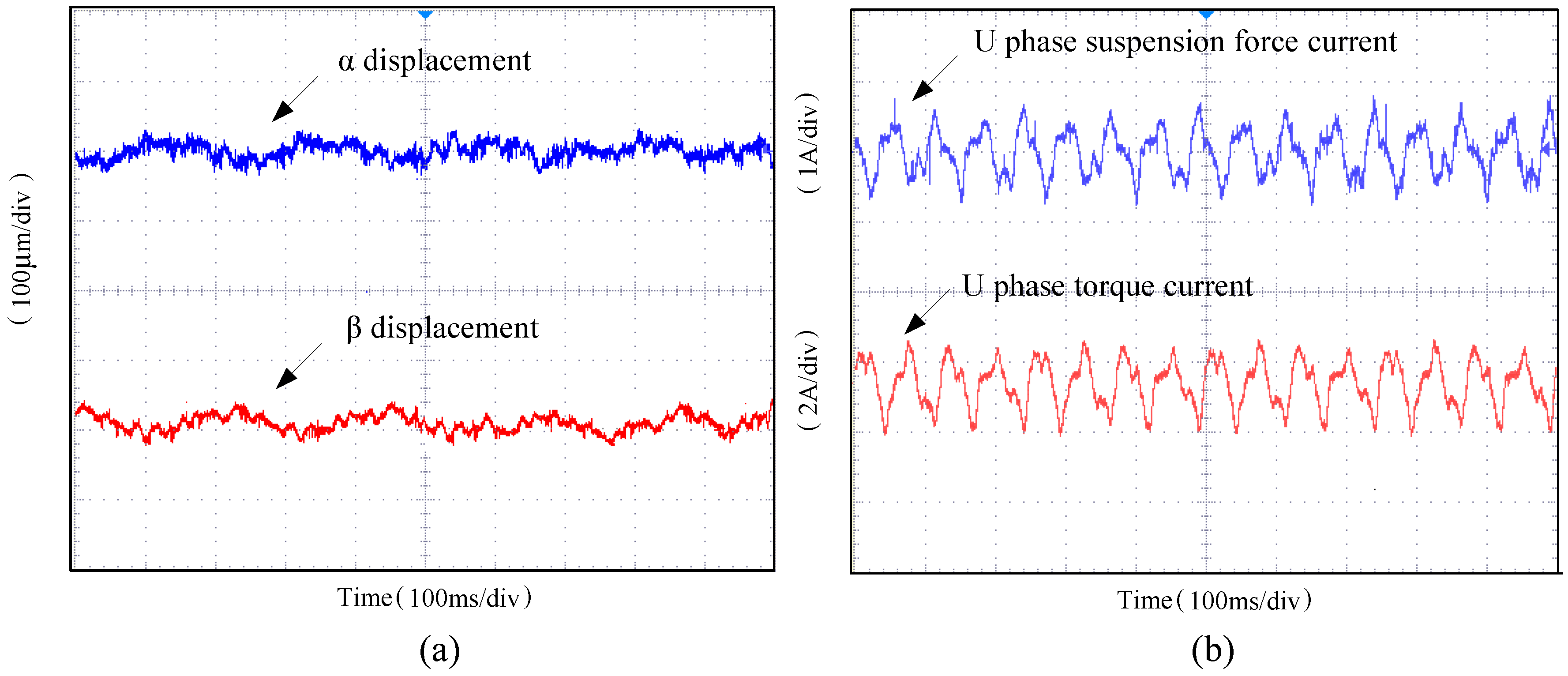
5.2. Analysis of Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sun, X.; Chen, L.; Yang, Z. Overview of bearingless permanent-magnet synchronous motor. IEEE Trans. Ind. Electron. 2013, 60, 5528–5538. [Google Scholar] [CrossRef]
- Li, H.; Zhu, H.Q. Bearingless motor’s radial suspension force control based on virtual winding current analysis. In Proceedings of the 17th International Conference on electrical Machines and Systems, Hangzhou, China, 22–25 October 2014; pp. 2141–2146.
- Eric, S.; Robert, N.; Ned, M. Dual-purpose no-voltage winding design for the bearingless AC homopolar and consequent pole motors. IEEE Trans. Ind. Appl. 2015, 51, 2884–2895. [Google Scholar]
- Reichert, T.; Nussbaumer, T.; Johann, W. Bearingless 300W PMSM for bioreactor mixing. IEEE Trans. Ind. Electron. 2012, 59, 1376–1388. [Google Scholar] [CrossRef]
- Asama, J.; Hamasaki, Y.; Oiwa, T. Proposal and analysis of a novel single-drive bearingless motor. IEEE Trans. Ind. Electron. 2013, 60, 129–138. [Google Scholar] [CrossRef]
- Nenninger, K.; Amrhein, W.; Silber, S. Bearingless single-phase motor with fractional pitch winding. In Proceedings of the 7th International Symposium on Magnetic Bearings, With Exhibition, Zurich, Switzerland, 23–25 August 2000; pp. 371–376.
- Chiba, A.; Sotome, K.; Iiyama, Y. A novel middle point current injection type bearingless PM synchronous motor for vibration suppression. IEEE Trans. Ind. Appl. 2011, 47, 1700–1706. [Google Scholar] [CrossRef]
- Kang, M.; Huang, J.; Jiang, H.B.; Yanget, J.Q. Principle and simulation of a 5-phase bearingless permanent magnet-type synchronous motor. In Proceedings of the International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 1148–4452.
- Zhu, J.; Deng, Z.Q.; Wang, X.L.; Liao, Q.X. Principle and implementation of the single winding bearingless permanent magnetic slice motor. Proc. CSEE 2008, 28, 68–74. [Google Scholar]
- Khoo, W.K.S. Bridge configured winding for poly phase self-bearing machines. IEEE Trans. Magn. 2005, 41, 1289–1295. [Google Scholar] [CrossRef]
- Chiba, A.; Horima, S.; Sugimoto, H. A principle and test results of a novel bearingless motor with motor parallel winding structure. In Proceedings of the IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 2474–2479.
- Eric, S.; Srikant, G.; Ned, M. Practical implementation of dual purpose no voltage drives for bearingless motors. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 819–826.
- Zhu, H.Q.; Wang, C.B.; Tan, E.; Li, T. Mathematical model and control technology of bearingless PMSM. In Proceedings of the IEEE Control and Decision Conference (CCDC), Xuzhou, China, 26–28 May 2010; pp. 3175–3179.
- Zhang, S.R.; Luo, F.L. Direct control of radial displacement for bearingless permanent magnet type synchronous motors. IEEE Trans. Ind. Electron. 2009, 56, 542–552. [Google Scholar] [CrossRef]
- Chou, Z.J.; Deng, Z.Q.; Wang, X.L. A study on independent control of the bearingless permanent magnet synchronous motor. Proc. CSEE 2006, 26, 115–119. [Google Scholar]
- Zhu, H.Q.; Tan, E. Direct torque and direct suspension force control of bearingless permanent magnet synchronous motor based on SVM. In Proceedings of the IEEE Control and Decision Conference (CCDC), Xuzhou, China, 26–28 May 2010; pp. 2411–2415.
- Silber, S.; Amrhein, W. Power optimal current control scheme for bearingless PM motors. In Proceedings of the 7th International Symposium on Magnetic Bearings, with Exhibition, Zurich, Switzerland, 23–25 August 2000; pp. 401–406.
- Sun, X.D.; Chen, L.; Yang, Z.B.; Shi, K. Modeling of a bearingless permanent magnet synchronous motor considering rotor eccentricity and coupling relationship of winding. Trans. China Electrotech. Soc. 2013, 28, 63–70. [Google Scholar]
- Wang, Q.J.; Ma, F.; Li, G.L.; Chen, J. The analysis and calculations on 3-dimensional field and inductance of a claw-pole alternator under no-load condition. Proc. CSEE 2002, 22, 38–42. [Google Scholar]
- Li, B.N.; Huang, J. Design and function analysis of multiphase PM bearingless motor with single set of winding. Large Electr. Mach. Hydraul. Turbine 2012, 10, 1–4. [Google Scholar]
- Ribeiro, R.L.A.; Castro, F.E.F.; Salazar, A.O.; Maitelli, A.L. A suitable current control strategy for split-phase bearingless three-phase induction machine. In Proceedings of the Power Electronics Specialists Conference (PESC), Recife, Brazil, 16 June 2005; pp. 701–706.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Rated mechanical power | PN | 500 W |
| Stator slot count | Q | 24 |
| Mechanical air gap length | δ0 | 1 mm |
| Magnet thickness | d | 3 mm |
| Pole pair count | PB | 2 |
| Winding resistance | Ra | 2.43 Ω |
| Winding inductance | La | 1.25 mH |
| Moment of inertia | J | 0.82 g·m2 |
| Initial position of rotor | α | −0.45 mm |
| Initial position of rotor | β | −0.2 mm |
| Rotor mass | m | 2.625 kg |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, H.; Yuan, J.; Jv, J. A Novel Single Winding Structure and Closed Loop Control of the Suspension Force Vector of Bearingless Permanent Magnet Synchronous Motors. Energies 2016, 9, 377. https://doi.org/10.3390/en9050377
Zhu H, Yuan J, Jv J. A Novel Single Winding Structure and Closed Loop Control of the Suspension Force Vector of Bearingless Permanent Magnet Synchronous Motors. Energies. 2016; 9(5):377. https://doi.org/10.3390/en9050377
Chicago/Turabian StyleZhu, Huangqiu, Jianfei Yuan, and Jintao Jv. 2016. "A Novel Single Winding Structure and Closed Loop Control of the Suspension Force Vector of Bearingless Permanent Magnet Synchronous Motors" Energies 9, no. 5: 377. https://doi.org/10.3390/en9050377
APA StyleZhu, H., Yuan, J., & Jv, J. (2016). A Novel Single Winding Structure and Closed Loop Control of the Suspension Force Vector of Bearingless Permanent Magnet Synchronous Motors. Energies, 9(5), 377. https://doi.org/10.3390/en9050377