
Economic Impact of Intelligent Dynamic Control in Urban Outdoor Lighting



Abstract
:1. Introduction
2. Problem Statement
3. State of the Art
- vehicle speed,
- traffic volume,
- traffic composition (motorized only, mixed),
- carriageway separation,
- junction density,
- presence of parked vehicles,
- ambient light levels,
- difficulty of navigational task.
4. Current Issues
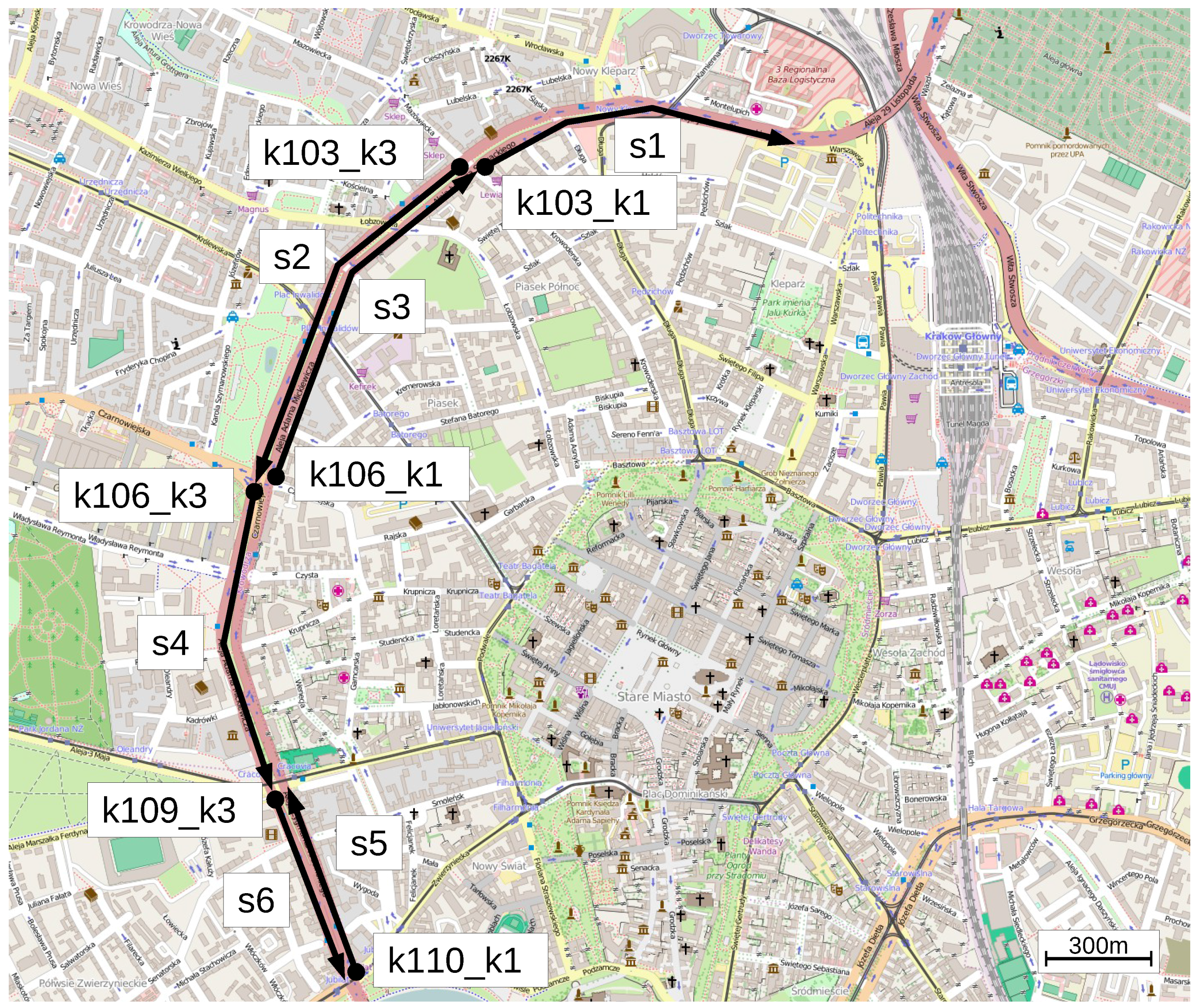
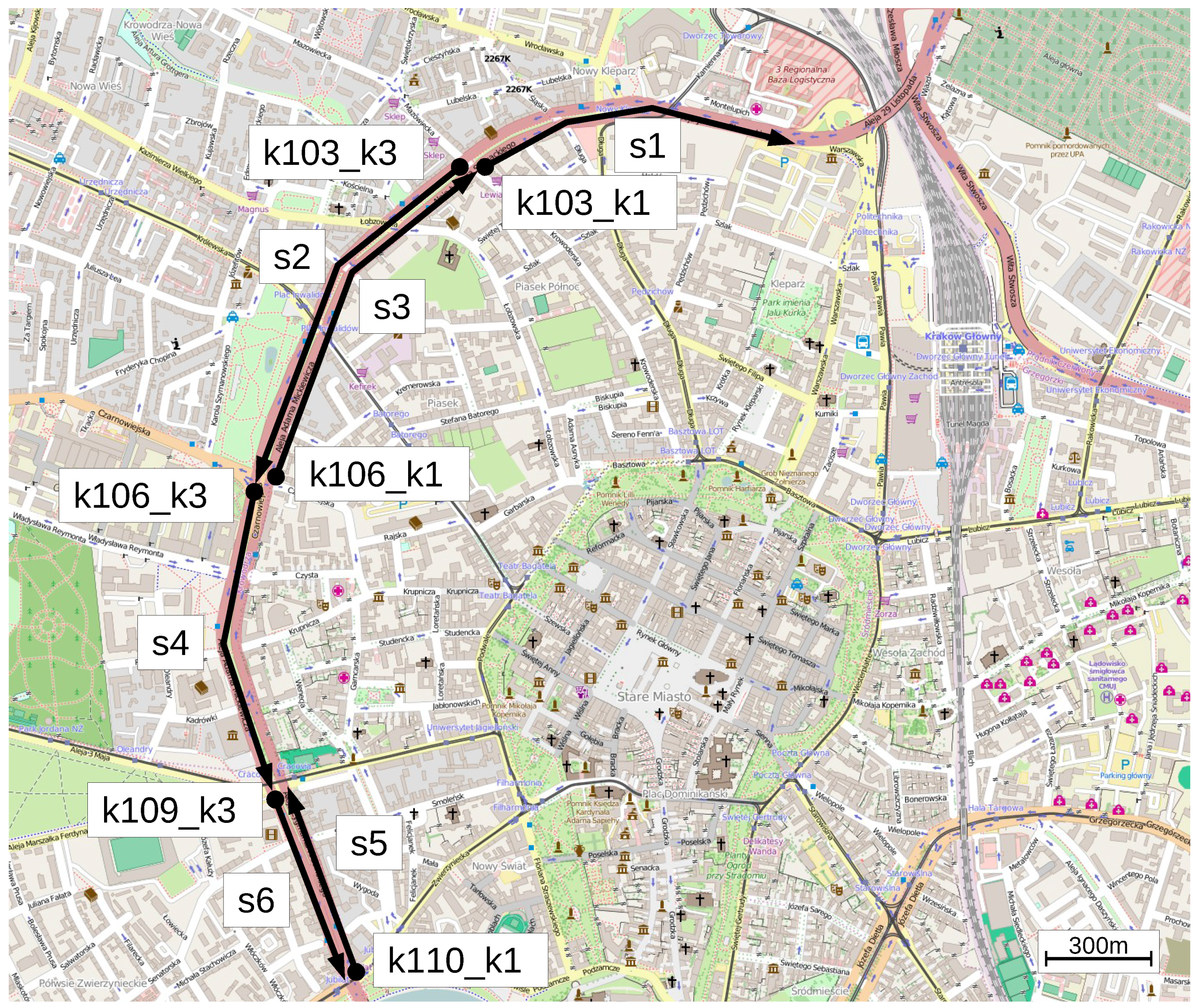
4.1. Description of the Analyzed Case
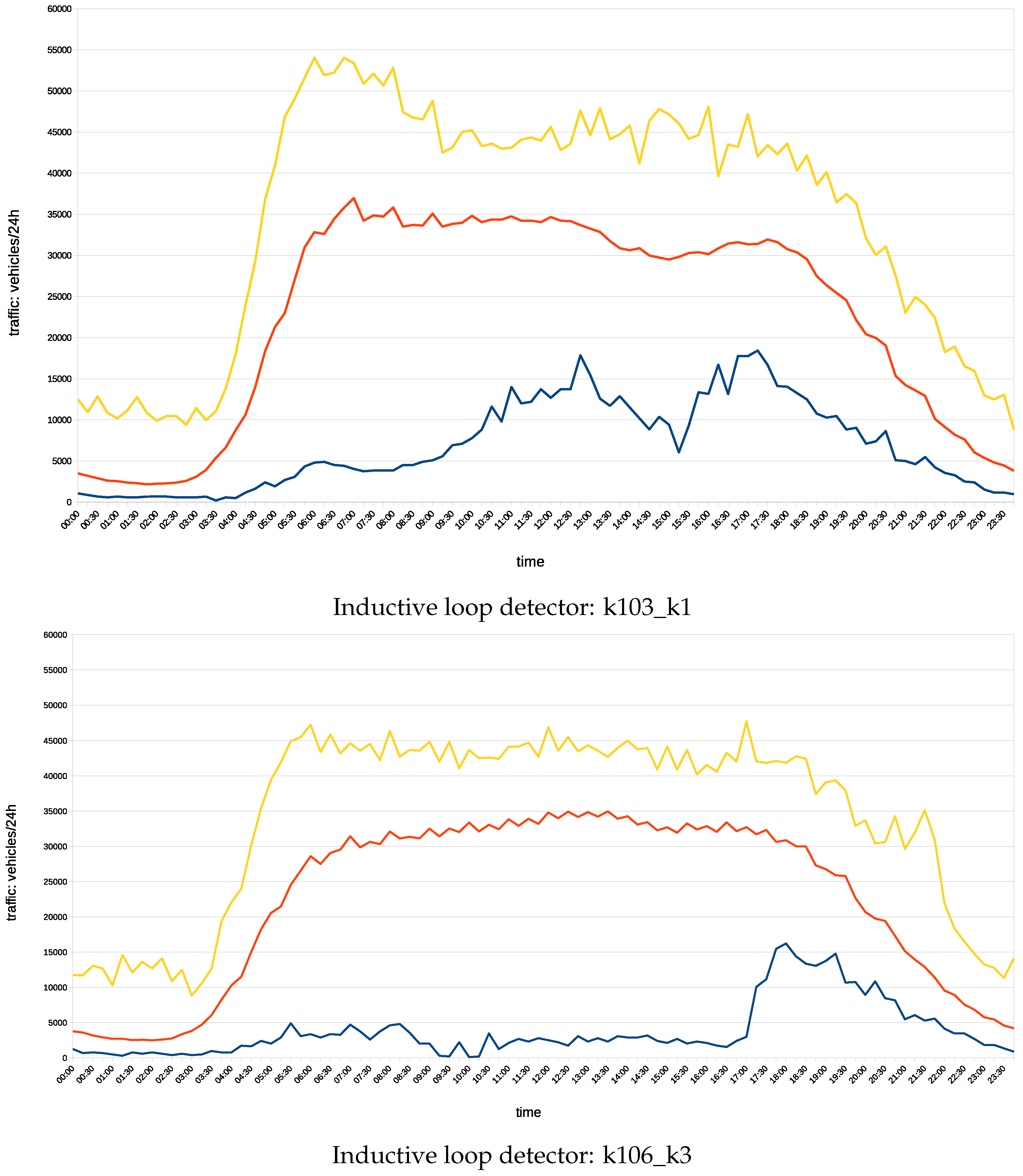
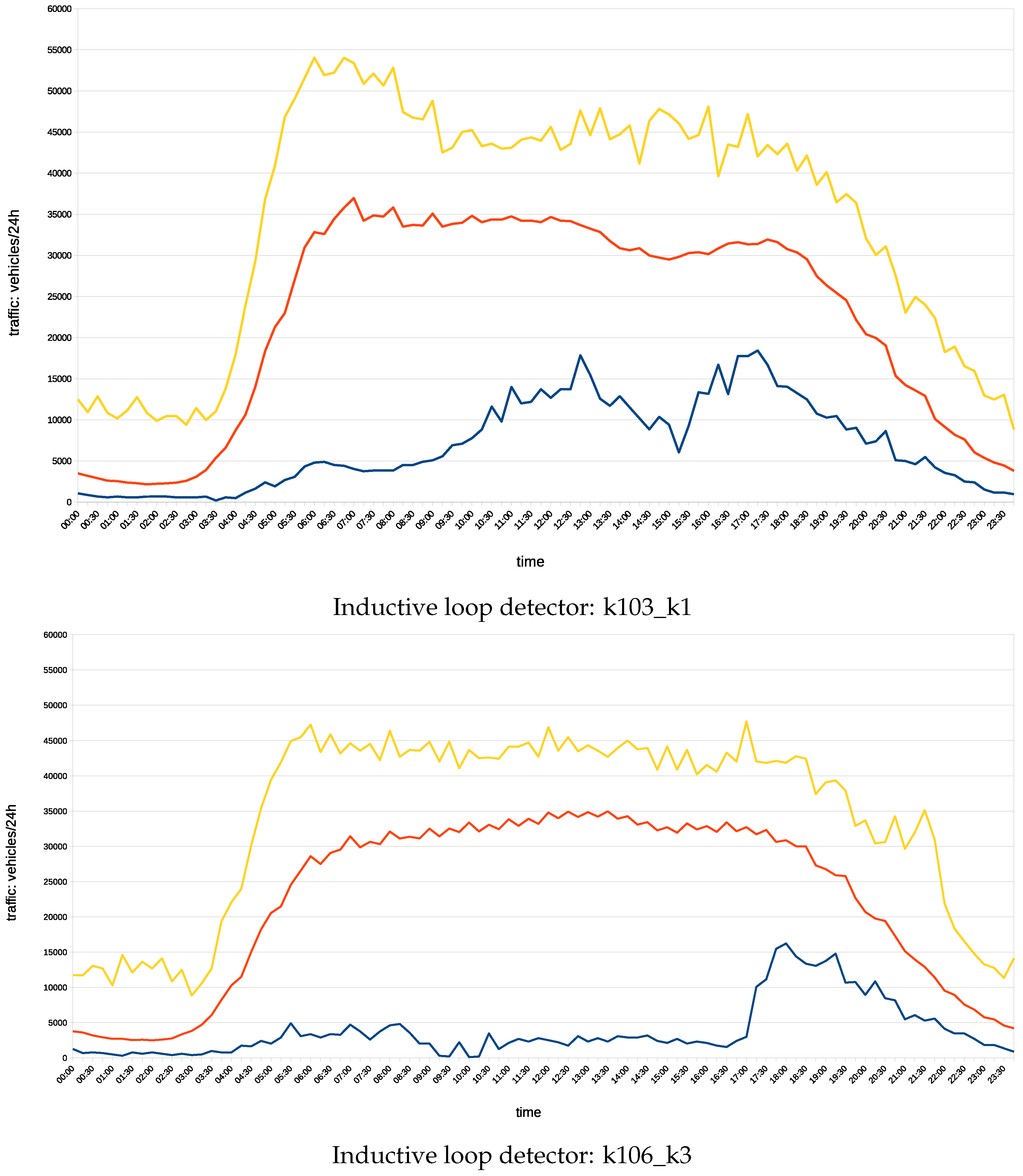
4.2. Simple Traffic Statistics Approach
4.3. Categorized Statistics Approach
4.4. Shortcomings of Schemes Based on Statistics
5. Proposed Solution
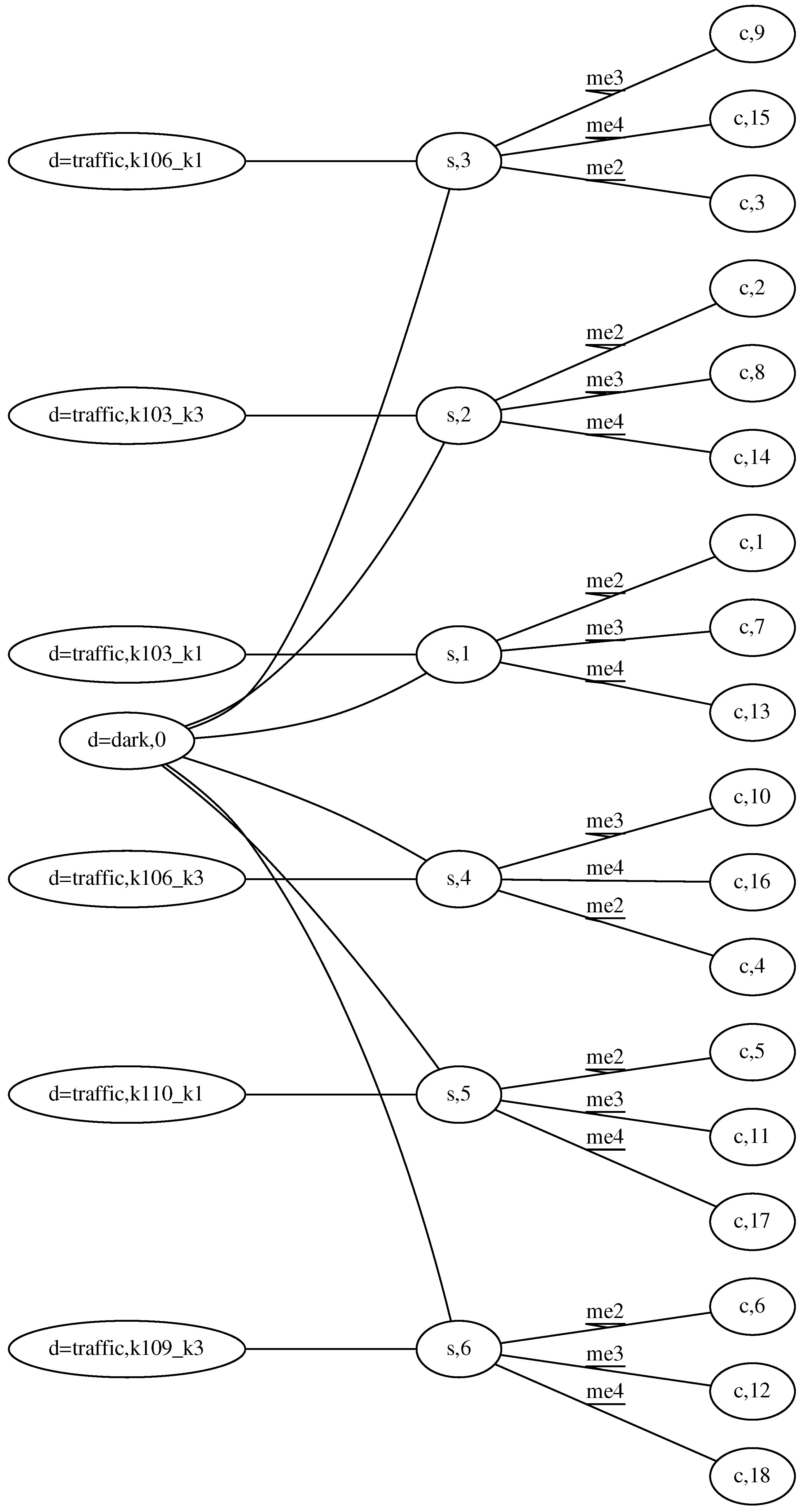
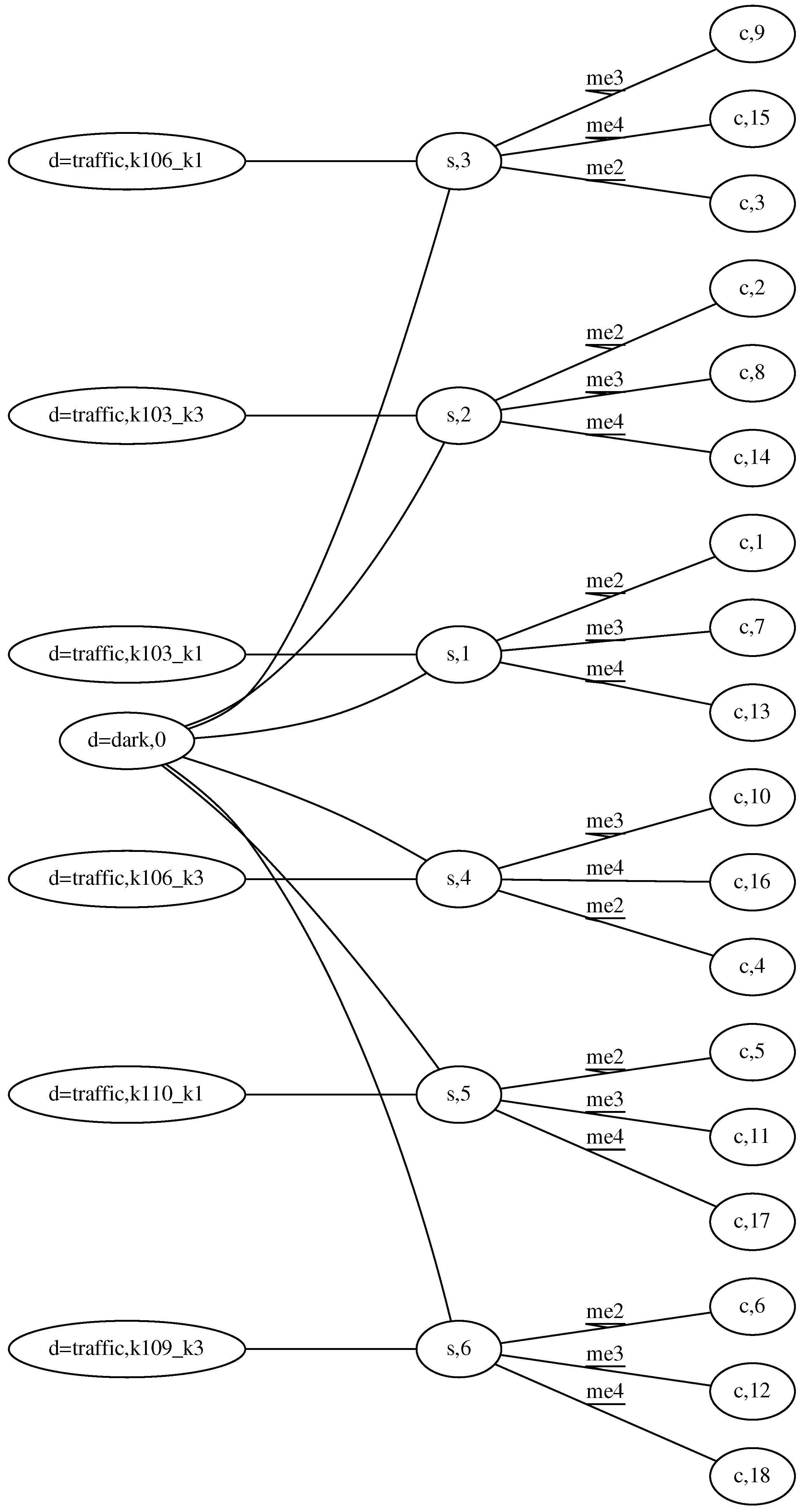
5.1. Description of the Model
- V is a finite, nonempty set of graph nodes identified unambiguously by some injective indexing function , where is a set of indexing symbols (usually is used but in some cases it is easier to provide arbitrary symbols to increase readability),
- is a set of edges,
- is a node labeling function,
- is an edge labeling function,
- and are sets of node and edge attributes respectively, , where:
- –
- s is the label of vertices representing segments,
- –
- l labels nodes representing luminaires,
- –
- d is the label of nodes representing any sensor device (traffic intensity, presence, movement, etc.),
- –
- c is the label of the node representing a set of adjustments, a configuration, associated with a relevant set of segments and lamps.
- (it allows for having multiple values for a single attribute at a vertex),
- are attributing functions for nodes and edges respectively, such that is a value of the attribute a, for the element , where .
5.2. Example of Application to the Considered Case
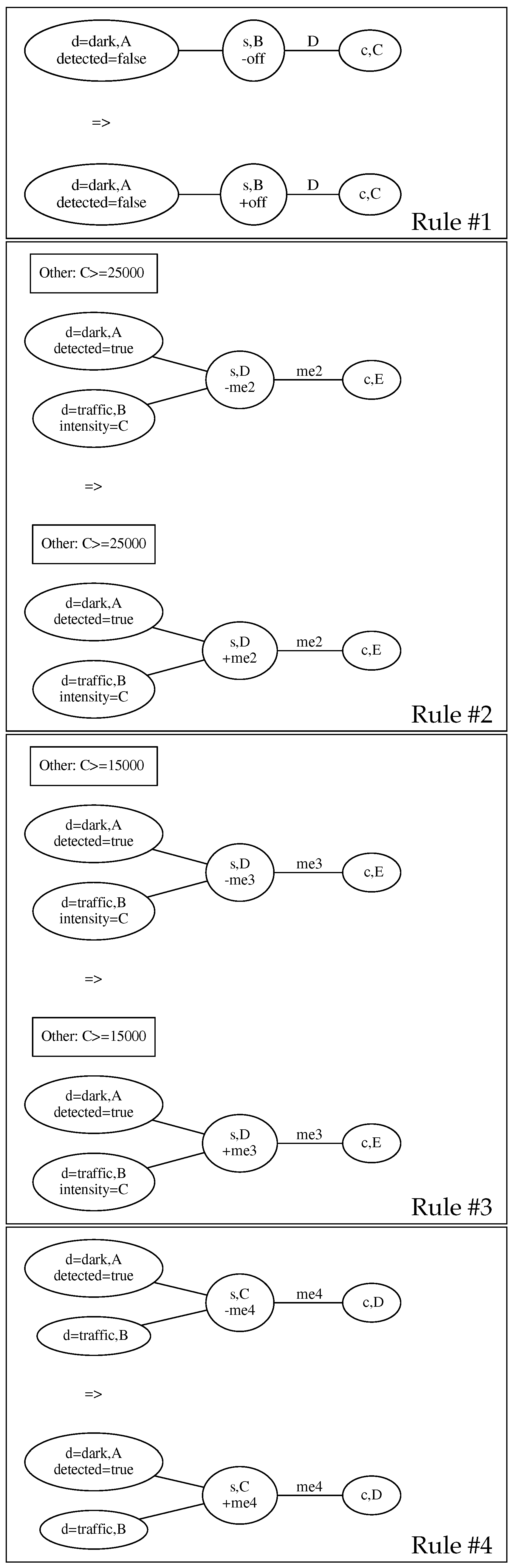
- If it is not dark, turn lights off.
- If it is dark and traffic intensity for past 15 min is more than or equal to 25,000 vehicles per 24 h, establish ME2.
- If it is dark and traffic intensity for past 15 min is more than or equal to 15,000 vehicles per 24 h, establish ME3.
- If it is dark, establish ME4.
- intention generation,
- intention resolution.
- A, B, C are indices of the identified vertices,
- d attribute are as follows: class = dark, detected = false,
- there is no attribute intent set to off at s (minus sign at the vertex),
- there is some label at the edge between s and c.
5.3. Efficiency of the Proposed Approach
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- European Commission. Green Paper: Lighting the Future. Accelerating the Deployment of Innovative Lighting Technologies; Technical Report; European Commission: Brussels, Belgium, 2011. [Google Scholar]
- Flaig, K.; Wikens, M. Lighting the Way Ahead: Second Strategic Agenda in Photonics; Technical Report; European Technology Platform Photonics21: Stuttgart, Germany, 2010. [Google Scholar]
- European Commission. Lighting the Cities: Accelerating the Deployment of Innovative Lighting in European Cities; Technical Report; European Commission: Brussels, Belgium, 2013. [Google Scholar]
- European Commitee for Standardization. CEN/TR 13201-1:2014, Road Lighting—Part 1: Guidelines on Selection of Lighting Classes; Technical Report; European Commitee for Standardization: Brussels, Belgium, 2014. [Google Scholar]
- European Commitee for Standardization. CEN/TR 13201-1:2004, Road Lighting. Selection of Lighting Classes; Technical Report; European Commitee for Standardization: Brussels, Belgium, 2004. [Google Scholar]
- Polski Komitet Normalizacyjny. PKN-CEN/TR 13201-1, OśWietlenie dróg, Część 1: Wybór Klas Oświetlenia; Technical Report; Polski Komitet Normalizacyjny: Warszawa, Poland, 2007. [Google Scholar]
- Sędziwy, A. A new approach to street lighting design. LEUKOS 2015. in print. [Google Scholar]
- Sedziwy, A. On acceleration of multi-agent system performance in large scale photometric computations. Advanced methods and technologies for agent and multi-agent systems. In Frontiers in Artificial Intelligence and Applications; Barbucha, D., Le, M.T., Howlett, R.J., Jain, L.C., Eds.; IOS Press: Amsterdam, The Netherlands, 2013; Volume 252, pp. 58–67. [Google Scholar]
- Kotulski, L.; Strug, B. Multi-Agent System for Distributed Adaptive Design. Key Eng. Mater. 2011, 486, 217–220. [Google Scholar] [CrossRef]
- Wojnicki, I.; Ernst, S.; Kotulski, L.; Sędziwy, A. Advanced street lighting control. Expert Syst. Appl. 2014, 41, 999–1005. [Google Scholar] [CrossRef]
- Travé-Massuyès, L.; Milne, R. Gas-turbine condition monitoring using qualitative model-based diagnosis. IEEE Expert Intell. Syst. Their Appl. 1997, 12, 22–31. [Google Scholar] [CrossRef]
- Moore, R.; Lindenfilzer, P.; Hawkinson, L.; Matthews, B. Process control with the G2 real-time expert system. In Proceedings of the 1st International Conference on Industrial and Engineering Applications of Artificial Intelligence and Expert Systems, Tullahoma, TN, USA, 1 June 1988; pp. 492–497.
- Gouyon, J.P. Kheops Users’s Guide; Report of Laboratoire d’Automatique et d’Analyse des Systemes; LAAS CNRS: Toulouse, France, 1994. [Google Scholar]
- Laffey, T.J.; Cox, P.A.; Schmidt, J.L.; Kao, S.M.; Readk, J.Y. Real-time knowledge-based systems. AI Mag. 1988, 9, 27–45. [Google Scholar]
- Smith, D.E.; Genesereth, M.R.; Ginsberg, M.L. Controlling recursive inference. Artif. Intell. 1986, 30, 343–389. [Google Scholar] [CrossRef]
- Wojnicki, I.; Kotulski, L.; Ernst, S. On scalable, event-oriented control for lighting systems, KES-AMSTA. In Frontiers in Artificial Intelligence and Applications; Barbucha, D., Le, M.T., Howlett, R.J., Jain, L.C., Eds.; IOS Press: Amsterdam, The Netherlands, 2013; Volume 252, pp. 40–49. [Google Scholar]
- Michell, N. Lighting as a tool for urban development. Cities Today 2015, 19, 28–32. [Google Scholar]
- BP Statistical Review of World Energy. BP Statistical Review of World Energy 2014; Technical Report; BP plc: London, UK, 2014. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ME2 [%] | ME3 [%] | ME4 [%] | Energy [kWh] | Savings [%] | |
|---|---|---|---|---|---|
| Astronomical clock | 100.0 | 0.0 | 0.0 | 30,430.60 | 0 |
| Statistics | 51.0 | 25.0 | 24.0 | 24,243.04 | 20 |
| Categorized Statistics | 46.5 | 15.0 | 38.5 | 23,020.76 | 24 |
| PhoCa | 27.0 | 14.0 | 59.0 | 20,033.47 | 34 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wojnicki, I.; Ernst, S.; Kotulski, L. Economic Impact of Intelligent Dynamic Control in Urban Outdoor Lighting. Energies 2016, 9, 314. https://doi.org/10.3390/en9050314
Wojnicki I, Ernst S, Kotulski L. Economic Impact of Intelligent Dynamic Control in Urban Outdoor Lighting. Energies. 2016; 9(5):314. https://doi.org/10.3390/en9050314
Chicago/Turabian StyleWojnicki, Igor, Sebastian Ernst, and Leszek Kotulski. 2016. "Economic Impact of Intelligent Dynamic Control in Urban Outdoor Lighting" Energies 9, no. 5: 314. https://doi.org/10.3390/en9050314
APA StyleWojnicki, I., Ernst, S., & Kotulski, L. (2016). Economic Impact of Intelligent Dynamic Control in Urban Outdoor Lighting. Energies, 9(5), 314. https://doi.org/10.3390/en9050314