
Conventional P-ω/Q-V Droop Control in Highly Resistive Line of Low-Voltage Converter-Based AC Microgrid



Abstract
:
1. Introduction
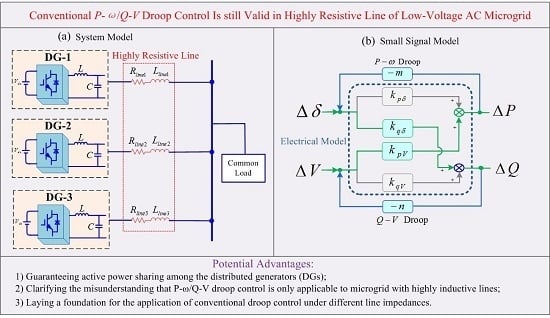
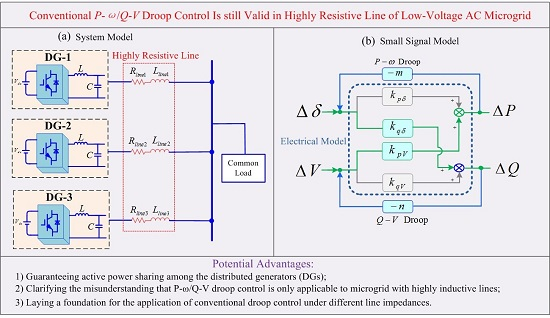
2. Operation Principle of AC Microgrid
2.1. Droop Method in Inductive Microgrids
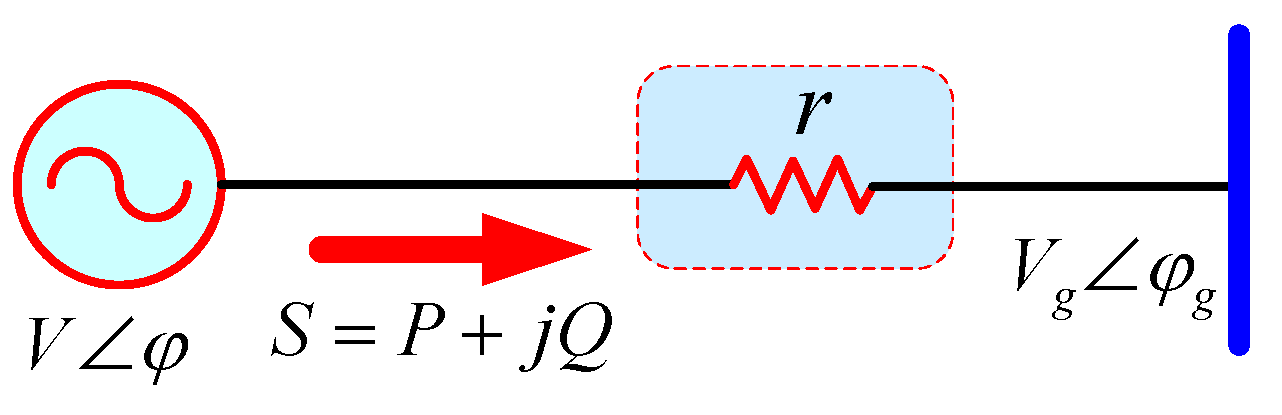
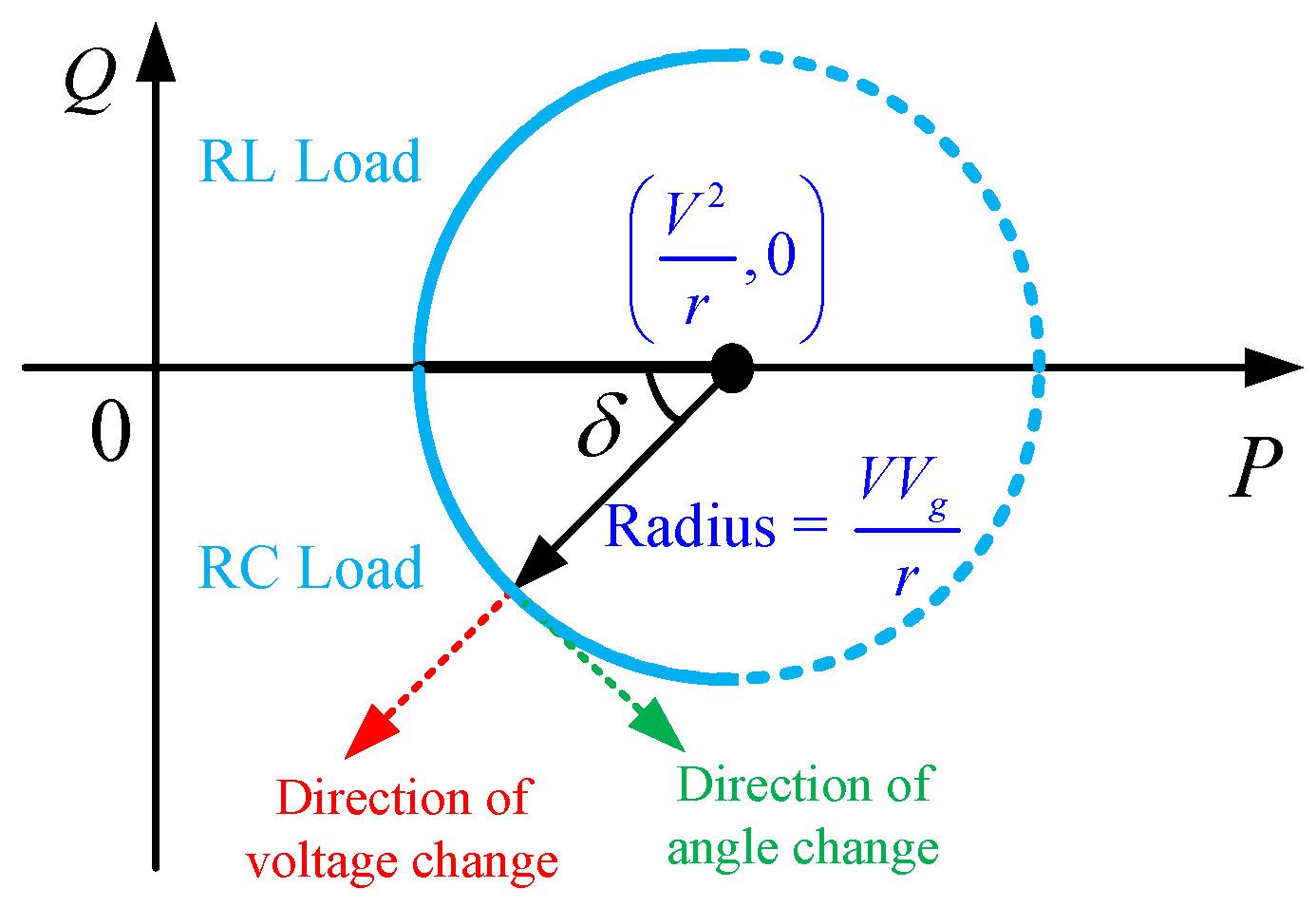
2.2. Power Transmission Characteristics in Resistive Microgrids
3. Small Signal Analysis
3.1. Small Signal Stability
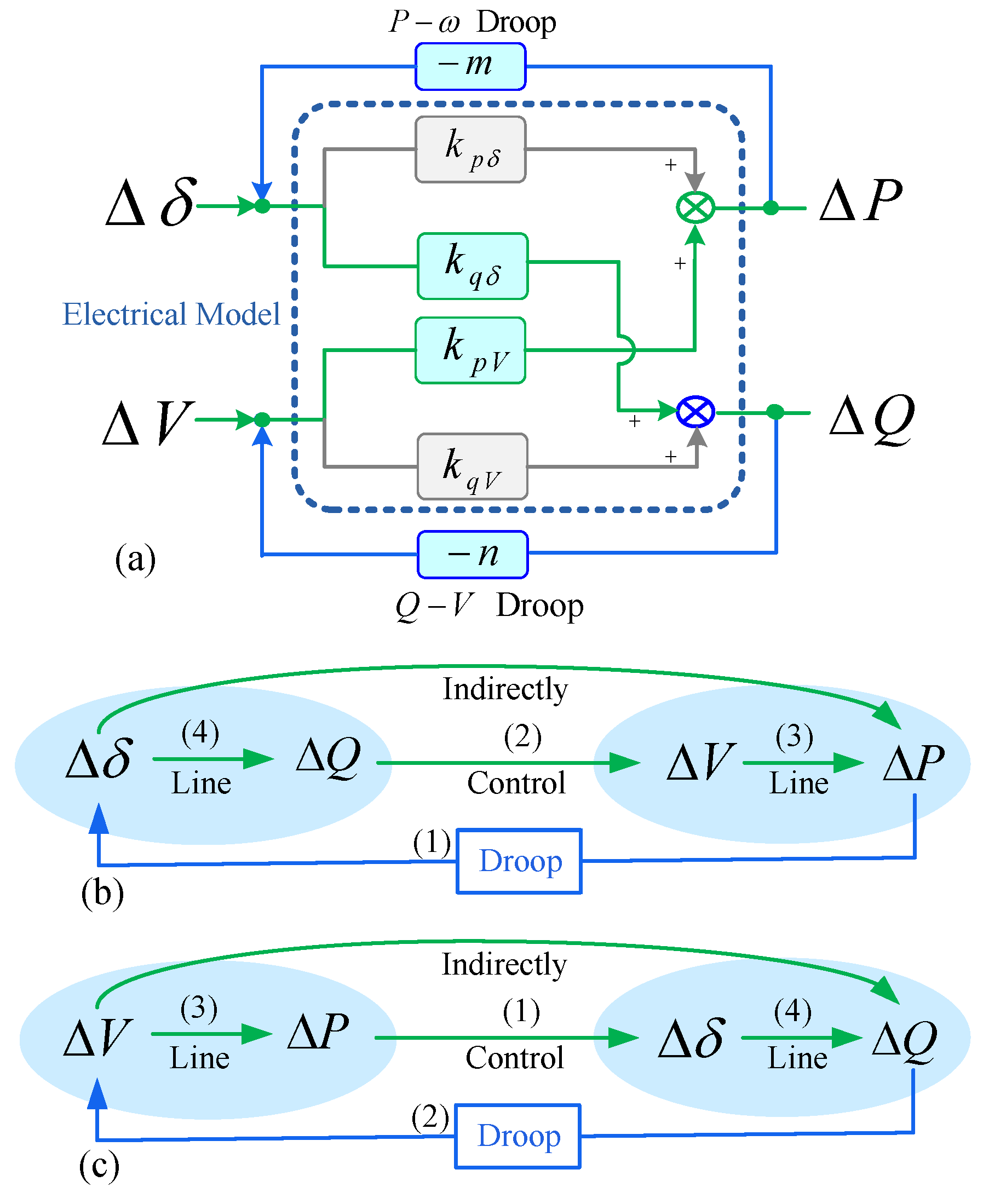
3.2. Explanation of Operating Principle
4. Steady State Analysis
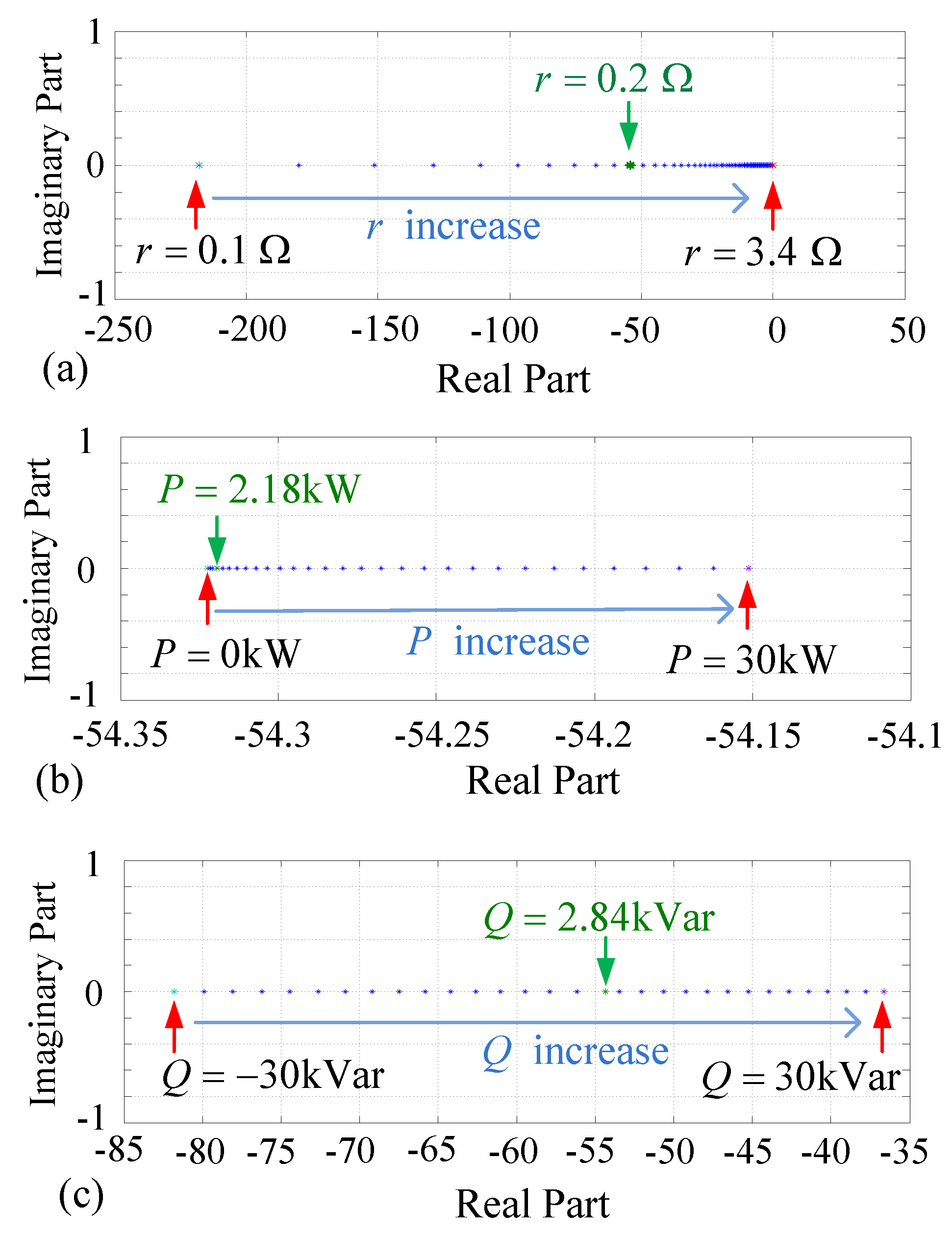
5. Guide on Designing the Q-V Droop Gains Considering Stability, Reactive Output Capacity, and Reactive Power Sharing
- (1)
- For different line resistances in Figure 5a, the system is always stable during . When the line resistance is too large, n should be redesigned according to Equation (38);
- (2)
- Figure 5b reveals that the output active power has little effect on the system stability;
- (3)
- Figure 5c reveals that n is always applicable in a larger range of output reactive power.
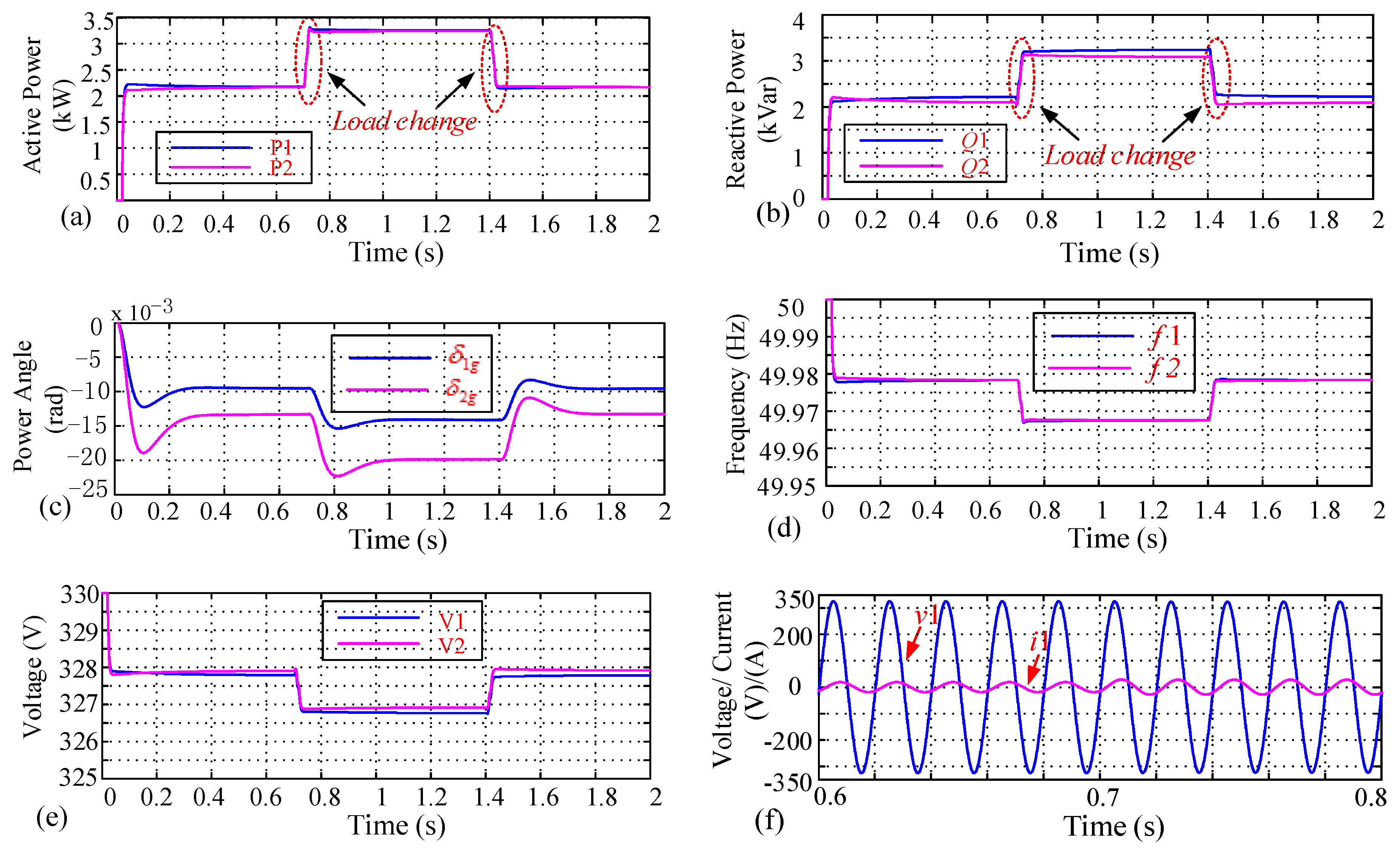
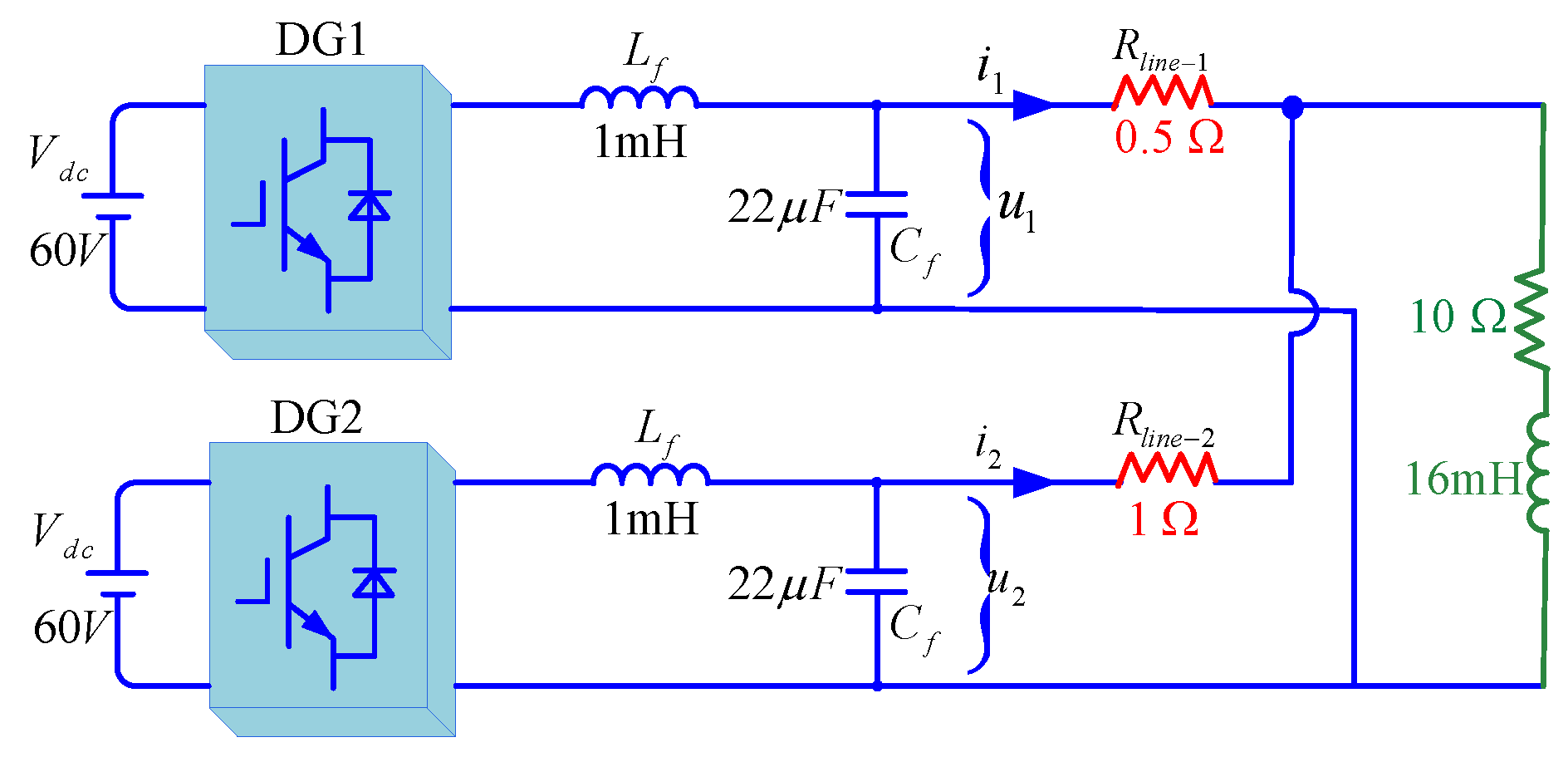
6. Simulation Results
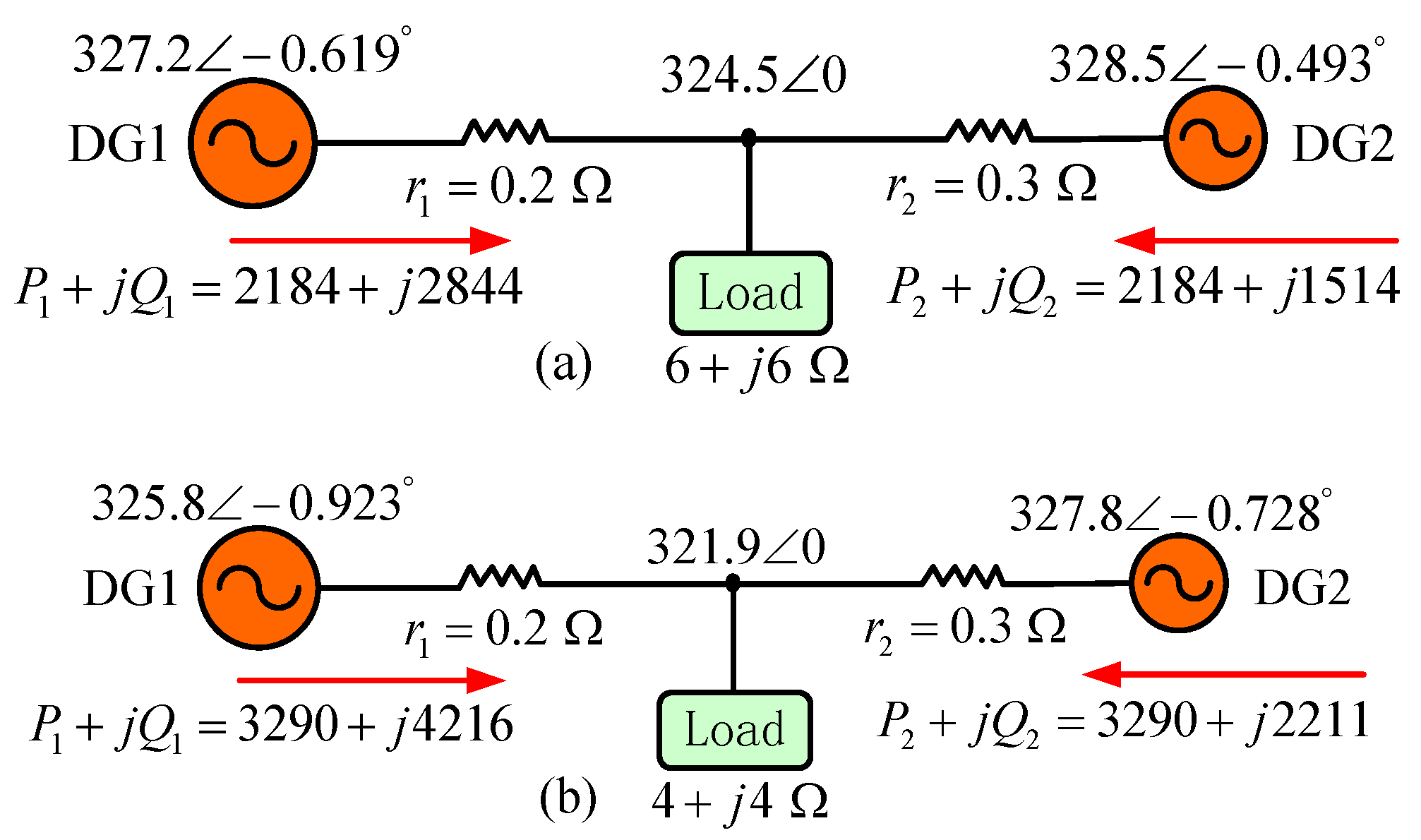
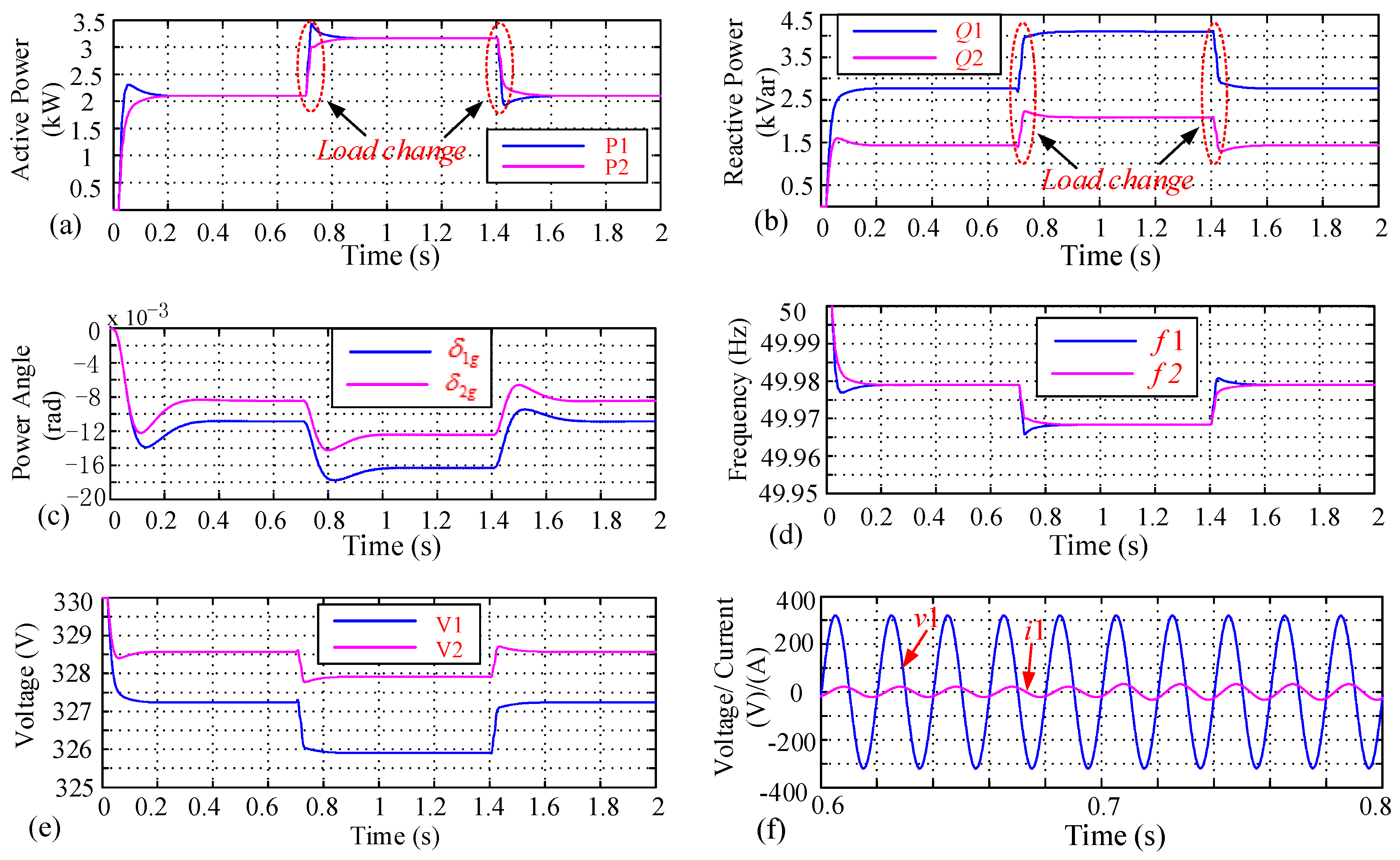
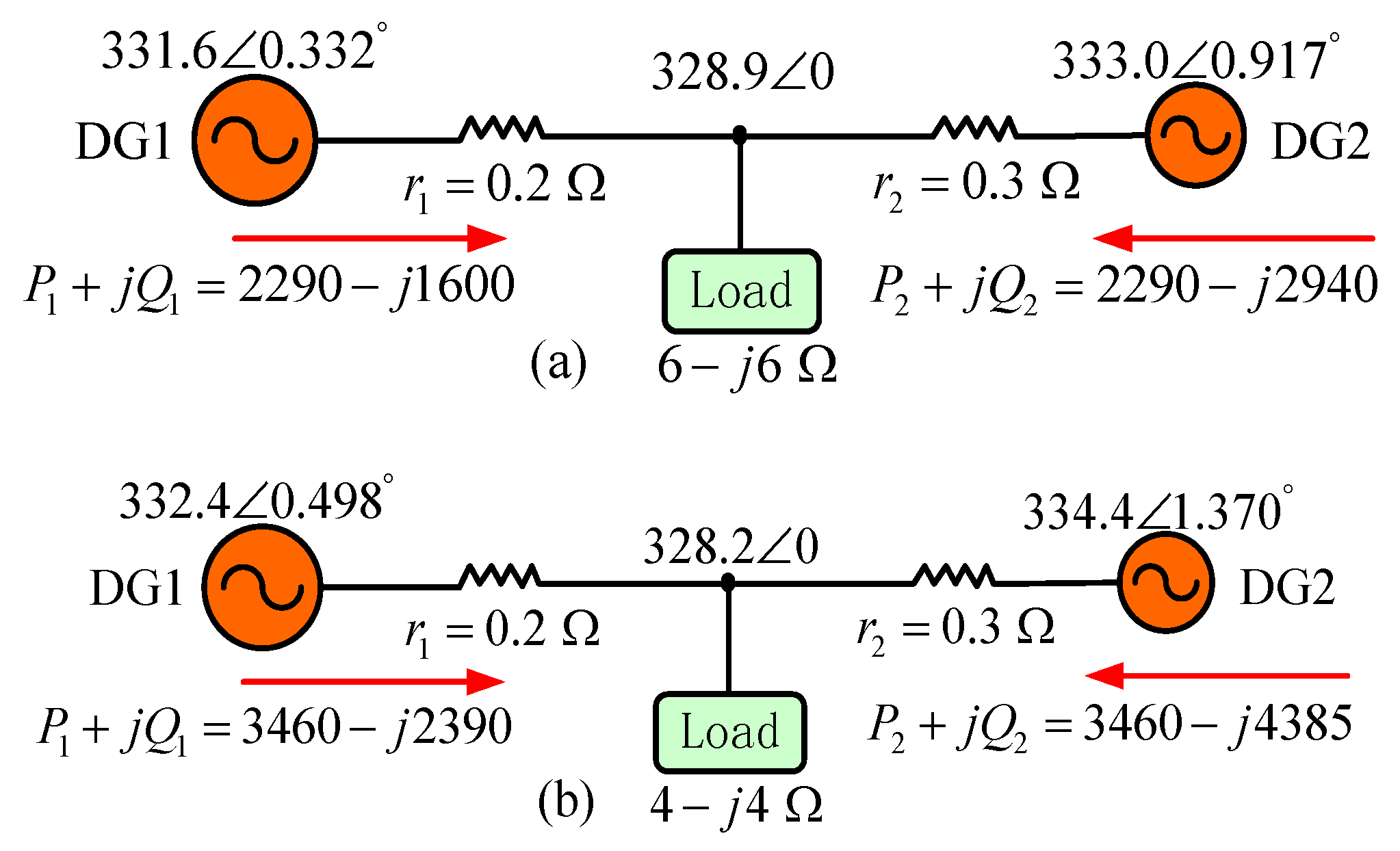
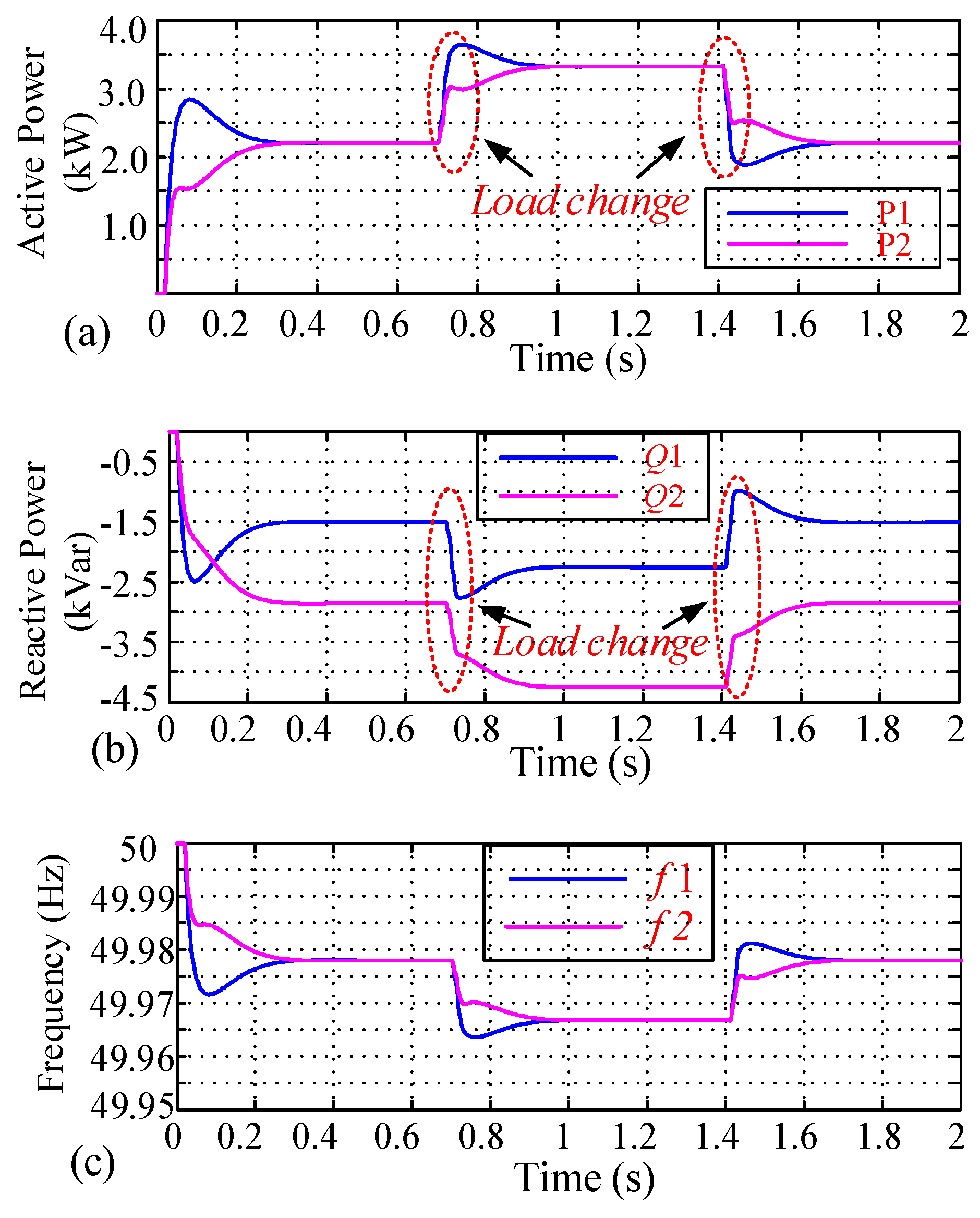
6.1. Case A: Two DGs with Same Power Rating under Resistance-Inductance Load
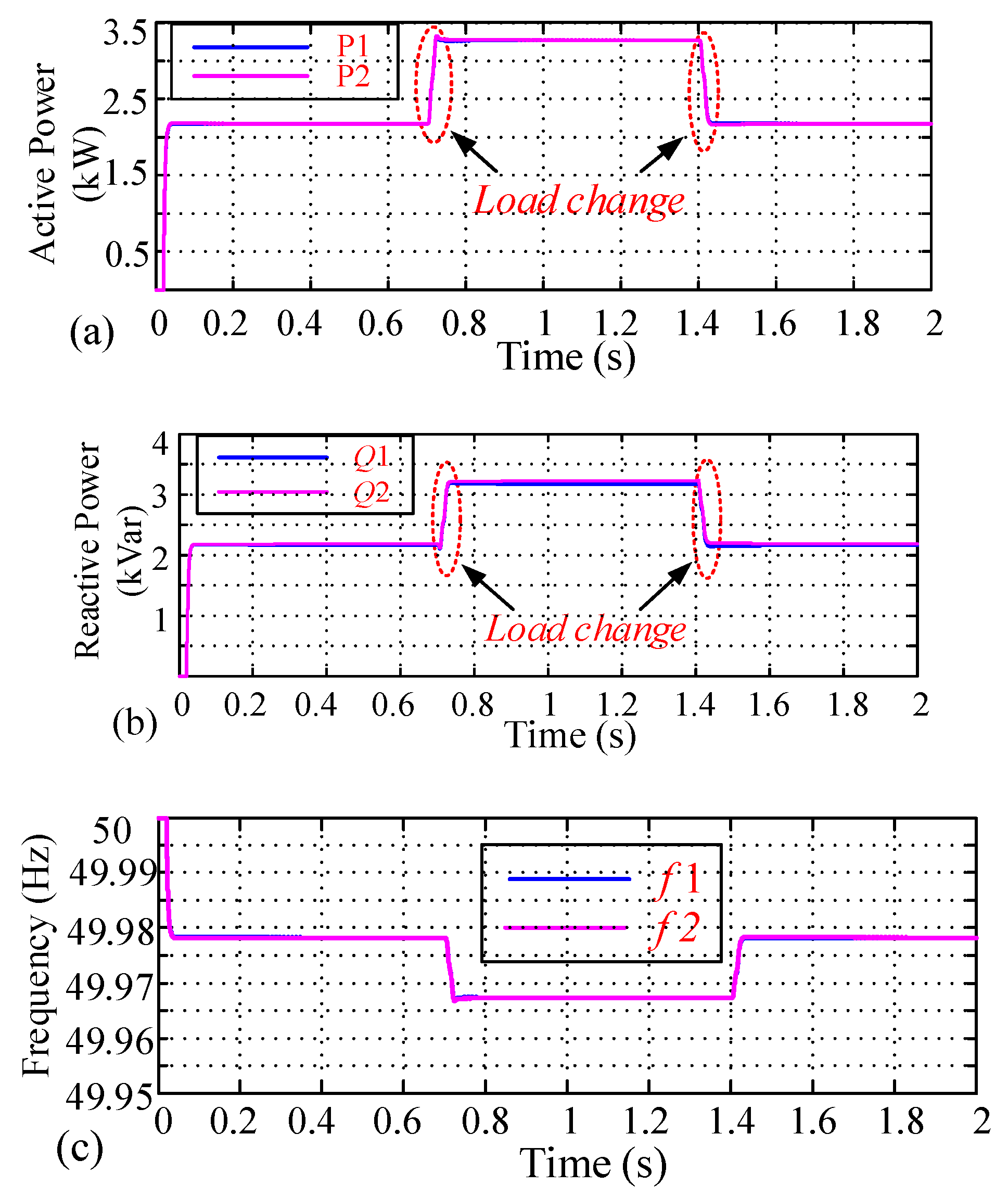
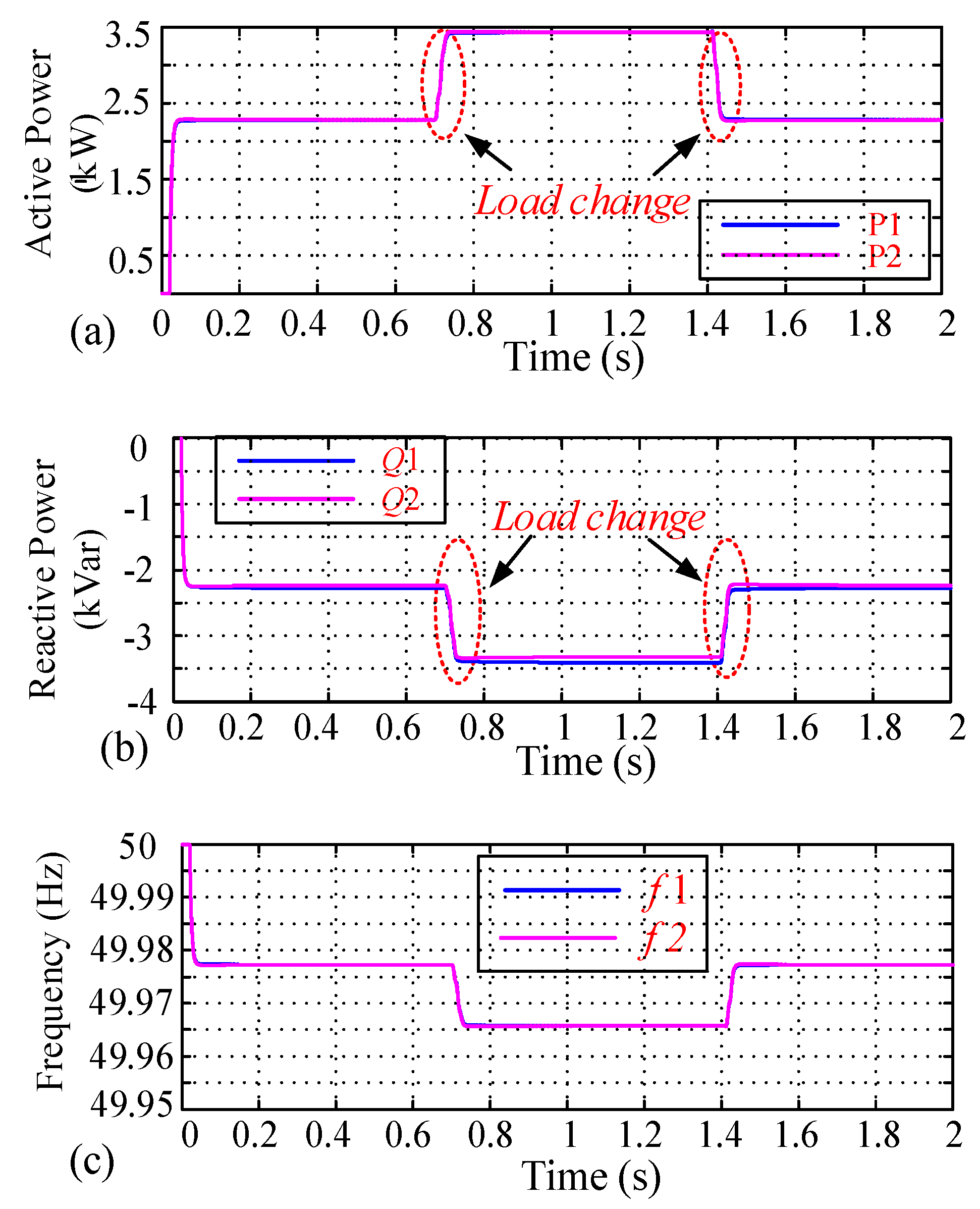
6.2. Case B: Virtual Resistance of DG1 to Improve Reactive Power Sharing under Resistance-Inductance Load
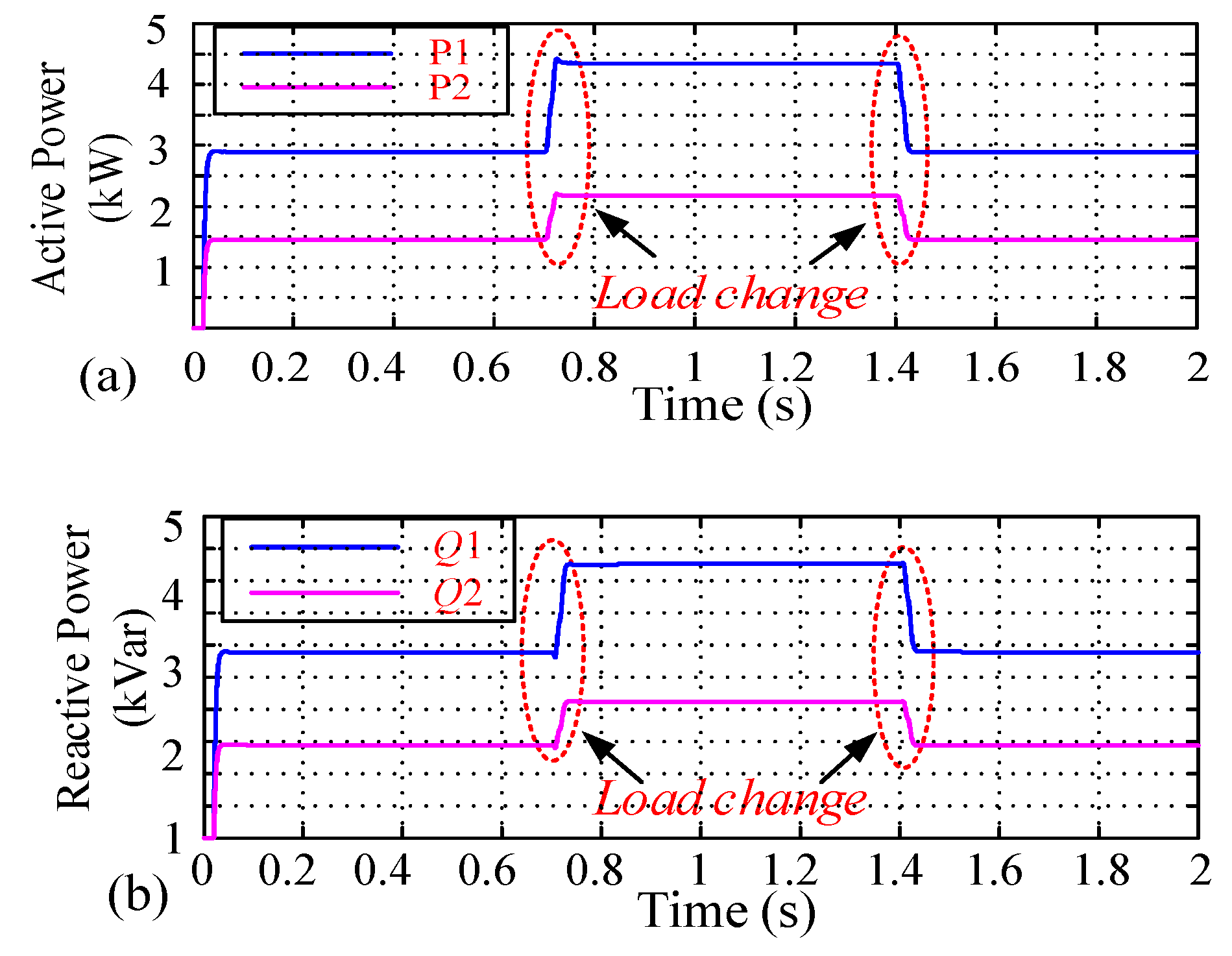
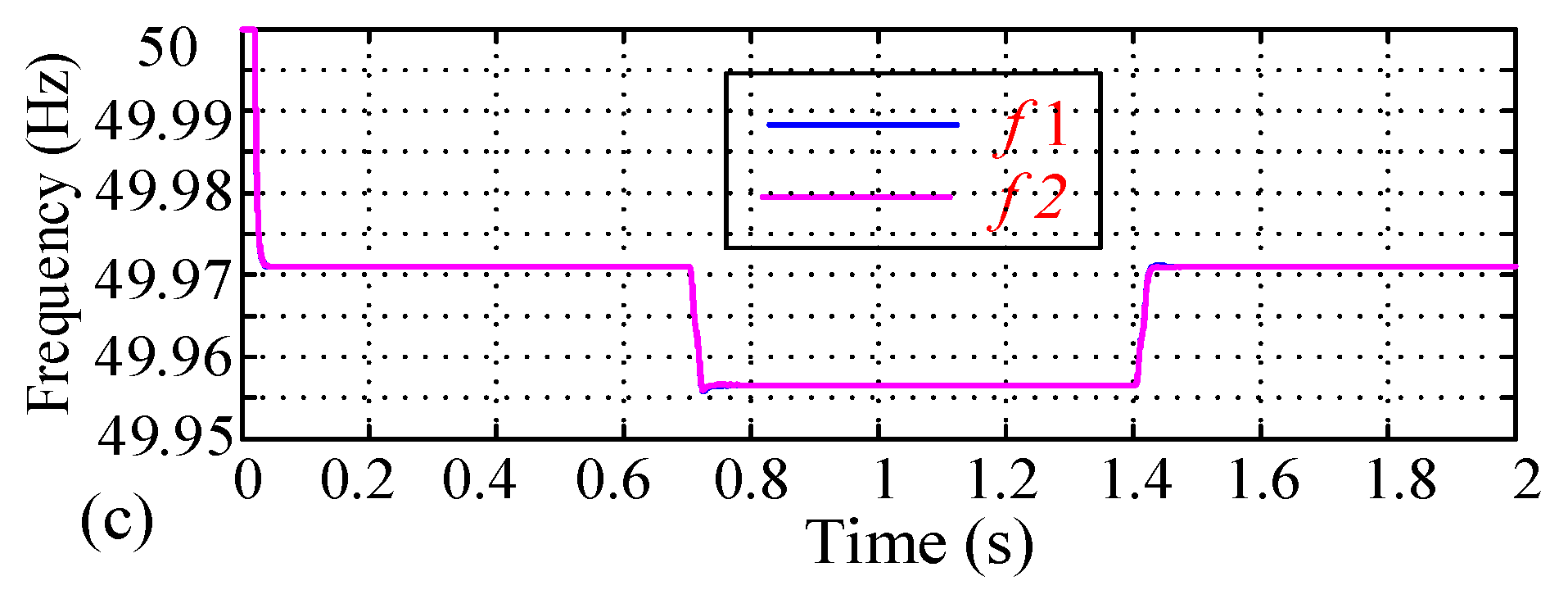
6.3. Case C: Both Power Rating of DG1 Are Twice Those of DG2 under Resistance-Inductance Load
6.4. Case D: Two DGs with the Same Power Rating under Resistance-Capacitance Load
6.5. Case E: Virtual Resistance of DG1 to Improve Reactive Power Sharing under Resistance-Capacitance Load
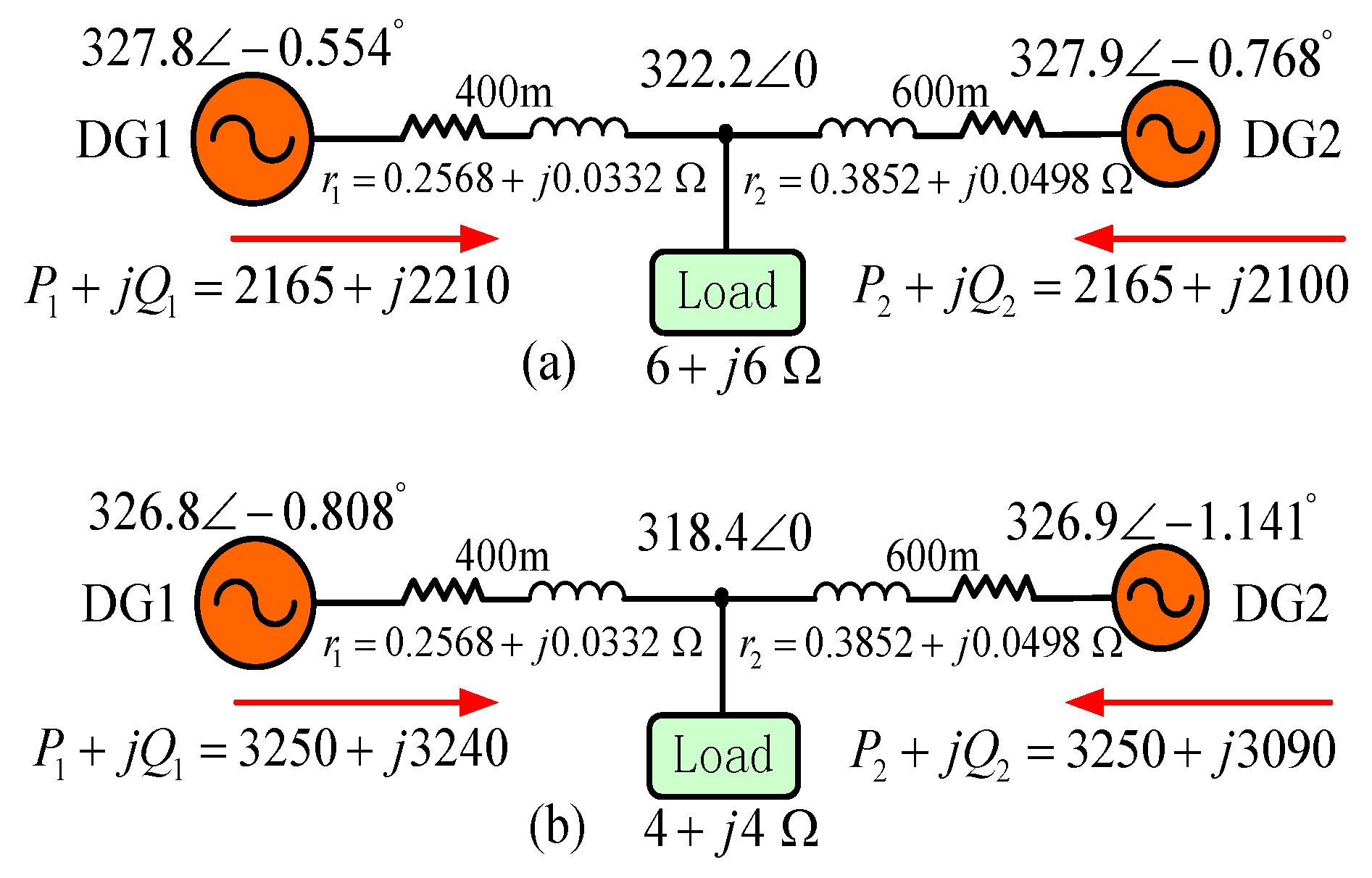
6.6. Case F: Validity of Conventional Droop Control in Highly Resistive Line of AC Microgrid
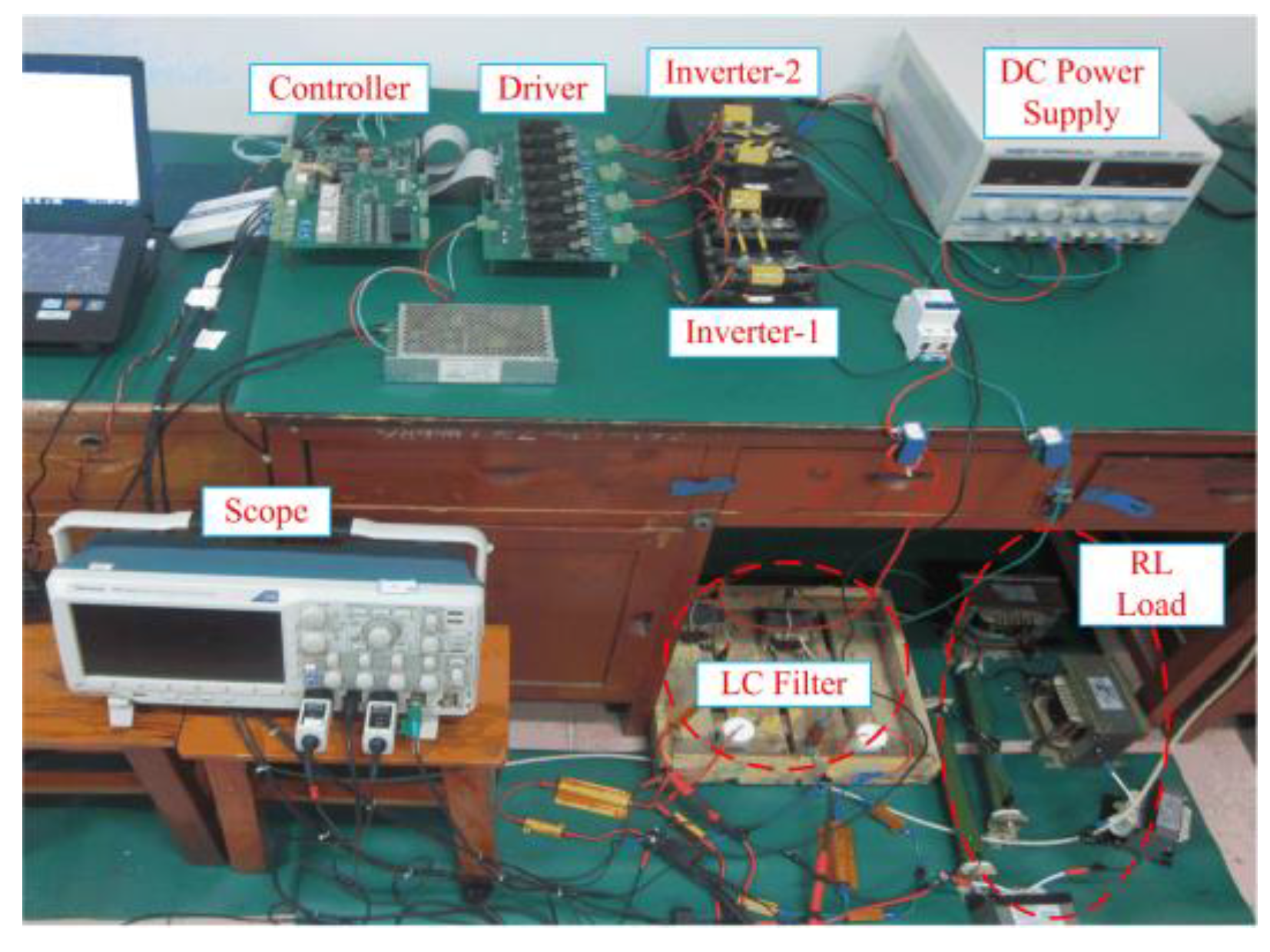
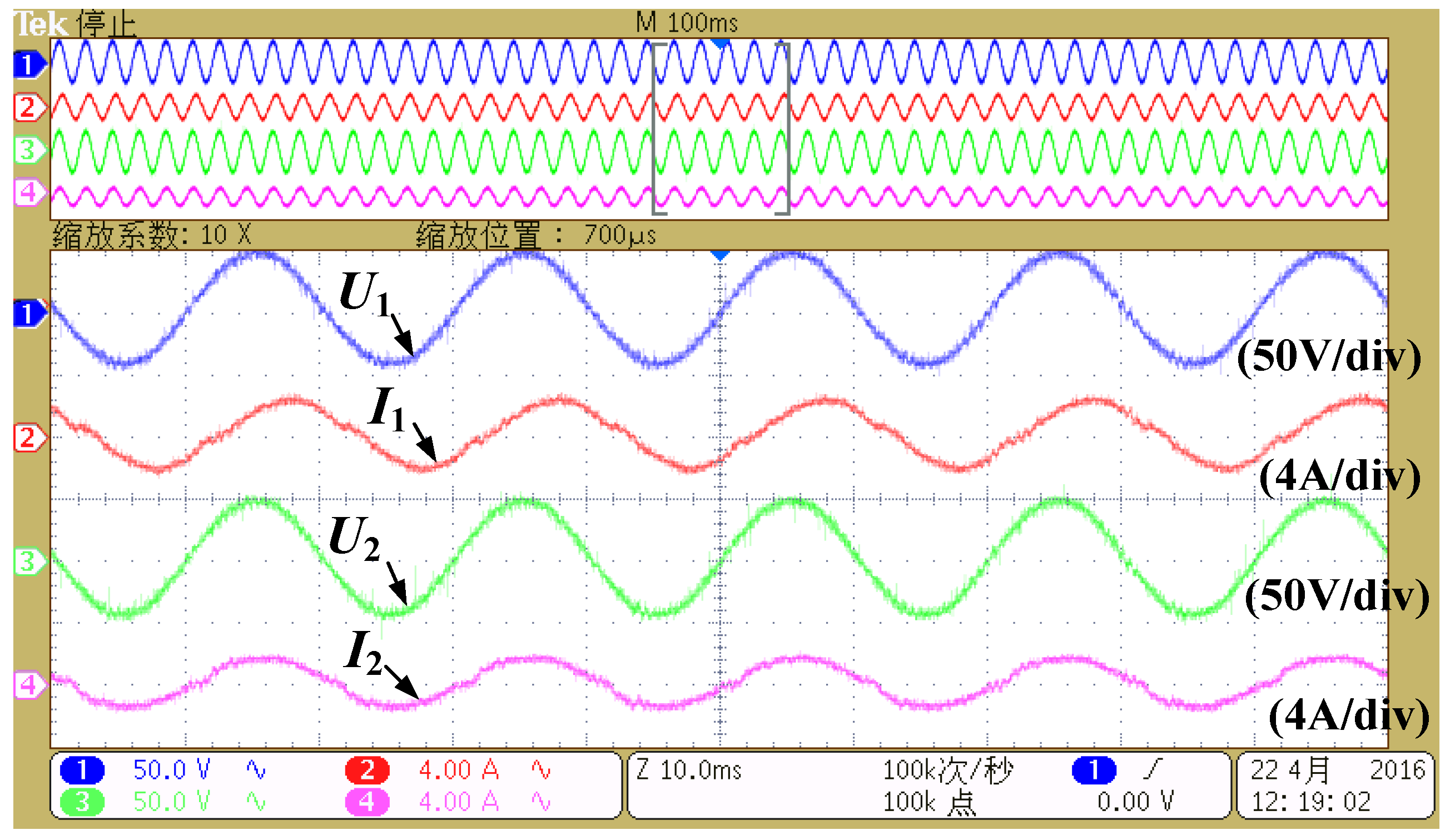
7. Experiment Results
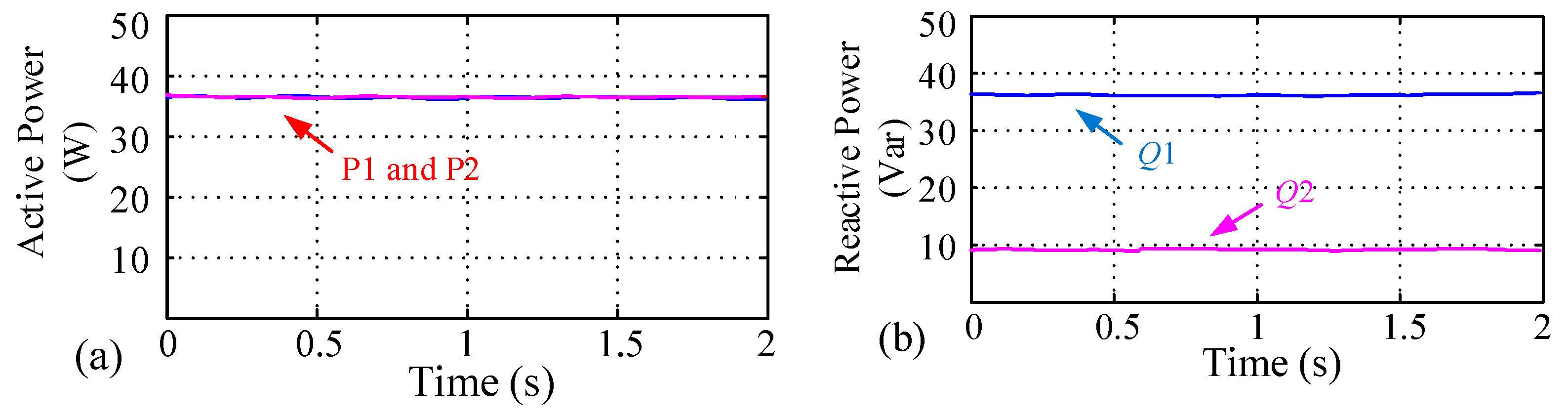
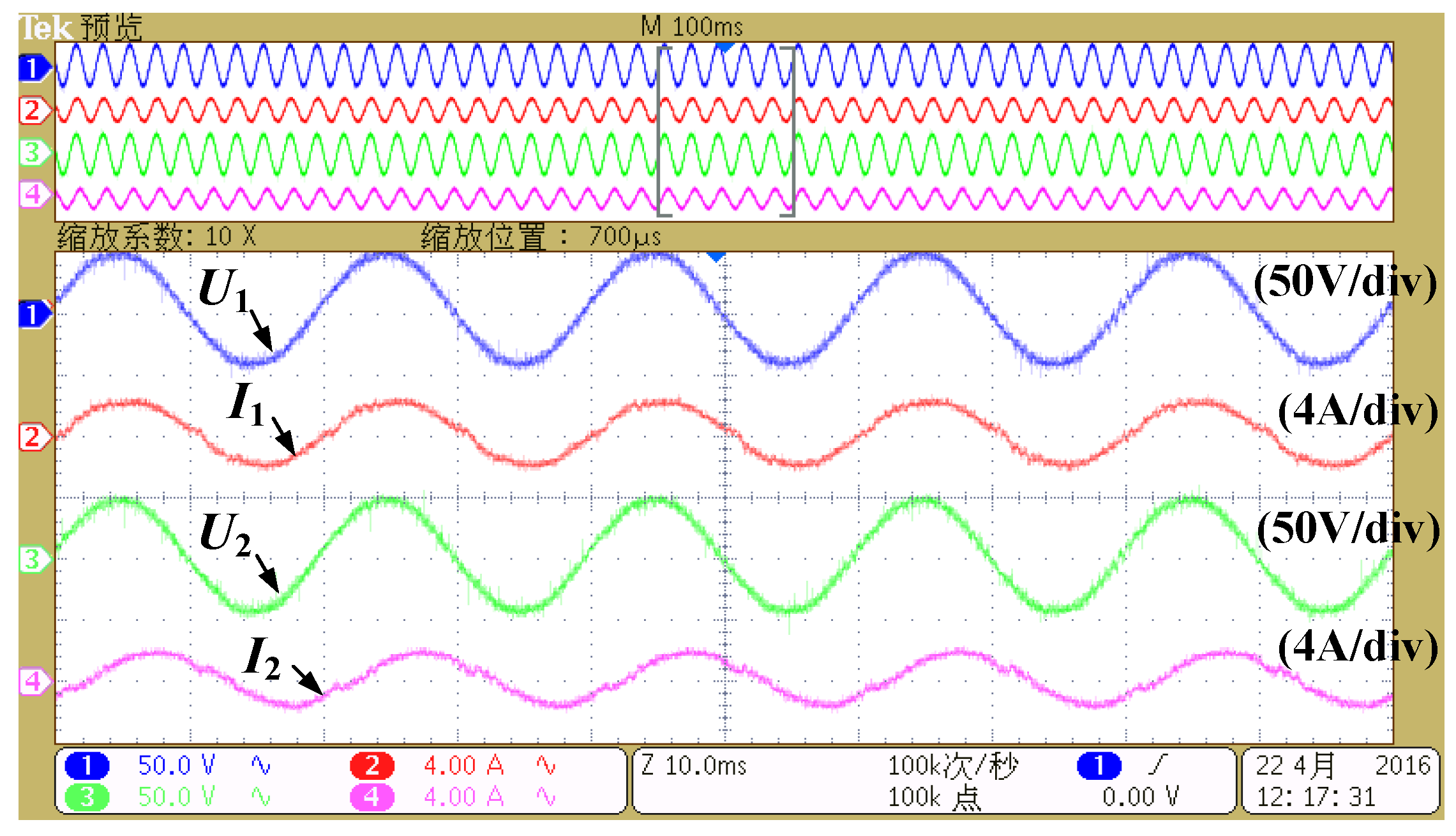
7.1. Case I: Two DGs with the Same Power Rating
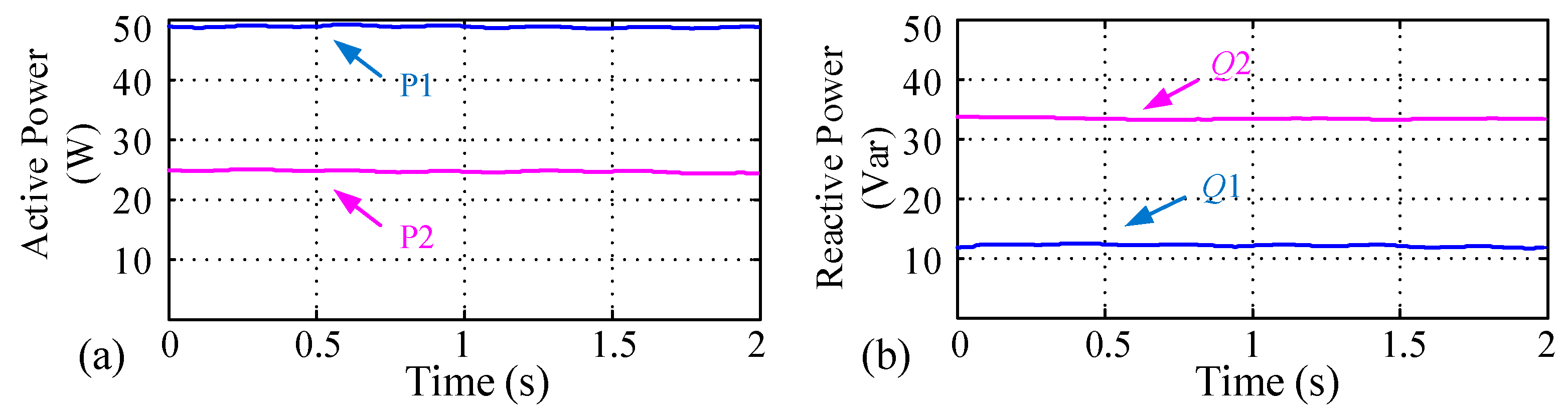
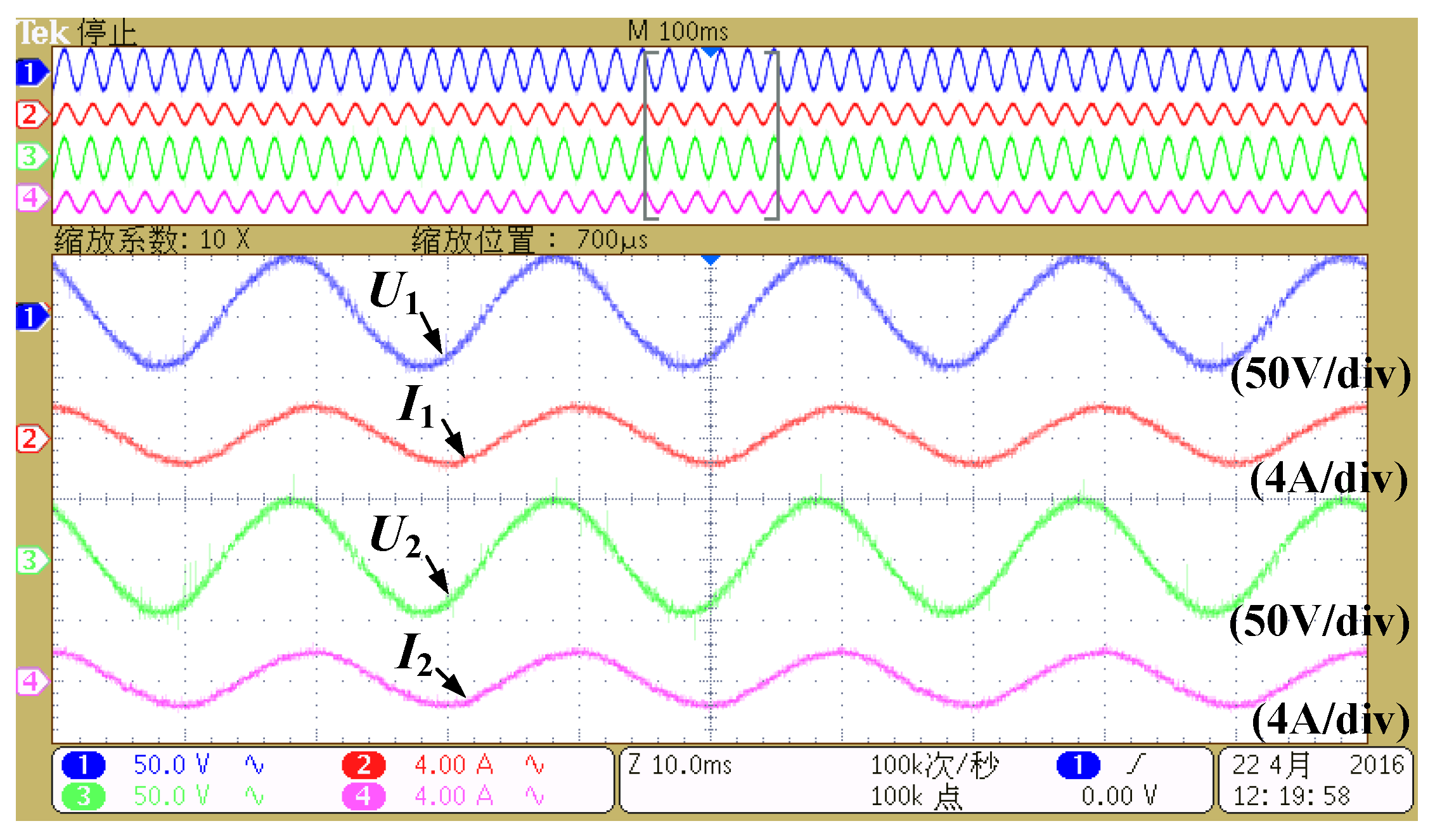
7.2. Case II: The Active Power Rating of DG1 Is Twice that for DG2
7.3. Case III: Redesign the Q-V Droop Gains of DG1 to Improve the Reactive Power Sharing
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lasseter, R.H.; Paigi, P. Microgrid: A conceptual solution. In Proceedings of the 2004 IEEE Power Electro Special Conference, Aachen, Germany, 20–25 June 2004; pp. 4285–4290.
- Yan, B.; Wang, B.; Zhu, L. A novel, stable, and economic power sharing scheme for an autonomous microgrid in the energy internet. Energies 2015, 8, 12741–12764. [Google Scholar] [CrossRef]
- Ahn, C.; Peng, H. Decentralized and real-time power dispatch control for an islanded microgrid supported by distributed power sources. Energies 2013, 6, 6439–6454. [Google Scholar] [CrossRef]
- Golsorkhi, M.S.; Lu, D.D.C. A control method for inverter-based islanded microgrids based on V-I droop characteristics. IEEE Trans. Power Deliv. 2015, 30, 1196–1204. [Google Scholar] [CrossRef]
- Pogaku, N.; Prodanovic, M.; Green, T.C. Modeling, analysis and testing of autonomous operation of an inverter-based microgrid. IEEE Trans. Power Electron. 2007, 22, 613–625. [Google Scholar] [CrossRef]
- He, J.W.; Li, Y.; Bosnjak, D.; Harris, B. Investigation and active damping of multiple resonances in a parallel-inverter-based microgrid. IEEE Trans. Power Electron. 2013, 28, 234–246. [Google Scholar] [CrossRef]
- Abdelaziz, M.M.A.; Shaaban, M.F.; Farag, H.E.; El-Saadany, E.F. A multistage centralized control scheme for islanded microgrids with PEV. IEEE Trans Sustain. Energy 2014, 5, 927–937. [Google Scholar] [CrossRef]
- Song, N.O.; Lee, J.H.; Kim, H.M.; Im, Y.H.; Lee, J.Y. Optimal energy management of multi-microgrids with sequentially coordinated operations. Energies 2015, 8, 8371–8390. [Google Scholar] [CrossRef]
- Caldognetto, T.; Paolo, T. Microgrids operation based on master-slave cooperative control. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 1081–1088. [Google Scholar] [CrossRef]
- Sun, Y.; Zhong, C.; Hou, X.; Yang, J.; Han, H.; Guerrero, J.M. Distributed cooperative synchronization strategy for multi-bus microgrids. Int. J. Electr. Power Energy Syst. 2017, 86, 18–28. [Google Scholar] [CrossRef]
- Lim, Y.; Kim, H.M.; Kinoshita, T. Distributed load-shedding system for agent-based autonomous microgrid operations. Energies 2014, 7, 385–401. [Google Scholar] [CrossRef]
- Yu, Z.; Ai, Q.; Gong, J.; Piao, L. A novel secondary control for microgrid based on synergetic control of multi-agent system. Energies 2016, 9. [Google Scholar] [CrossRef]
- Chandorkar, M.C.; Divan, D.M.; Adapa, R. Control of parallel connected inverters in standalone AC supply systems. IEEE Trans. Ind. Appl. 1993, 29, 136–143. [Google Scholar] [CrossRef]
- Yu, X.; Khambadkone, A.M.; Wang, H. Control of parallel-connected power converters for low-voltage microgrid—Part I: A hybrid control architecture. IEEE Trans. Power Electron. 2010, 25, 2962–2970. [Google Scholar] [CrossRef]
- Tuladhar, A.; Jin, H.; Unger, T.; Mauch, K. Control of parallel inverters in distributed ac power systems with consideration of line impedance effect. IEEE Trans. Ind. Appl. 2000, 36, 131–138. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Matas, J.; de Vicuña, L.G. Decentralized control for parallel operation of distributed generation inverters using resistive output impedance. IEEE Trans. Ind. Electron. 2007, 54, 994–1004. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Zhong, Q.-C. Robust droop controller for accurate proportional load sharing among inverters operated in parallel. IEEE Trans. Ind. Electron. 2013, 60, 1281–1290. [Google Scholar] [CrossRef]
- Zhong, Q.-C.; Hornik, T. Control of Power Inverters in Renewable Energy and Smart Grid Integration; Wiley-IEEE Press: Hoboken, NJ, USA, 2013. [Google Scholar]
- He, J.; Li, Y. Analysis, design, and implementation of virtual impedance for power electronics interfaced distributed generation. IEEE Trans. Ind. Appl. 2011, 47, 2525–2538. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vicuna, L.G.D.; Matas, J.; Castilla, M.; Miret, J. Output impedance design of parallel-connected UPS inverters with wireless load-sharing control. IEEE Trans. Ind. Electron. 2005, 52, 1126–1135. [Google Scholar] [CrossRef]
- Li, Y.W.; Kao, C.-N. An accurate power control strategy for power-electronics-interfaced distributed generation units operating in a low-voltage multibus microgrid. IEEE Trans. Power Electron. 2009, 24, 2977–2988. [Google Scholar]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; de Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2011, 58, 158–172. [Google Scholar] [CrossRef]
- Parhizi, S.; Lotfi, H.; Khodaei, A.; Bahramirad, S. State of the art in research on microgrids: A review. IEEE Access 2015, 3, 890–925. [Google Scholar] [CrossRef]
- Bevrani, H.; Shokoohi, S. An intelligent droop control for simultaneous voltage and frequency regulation in islanded microgrids. IEEE Trans. Smart Grid 2013, 4, 1505–1513. [Google Scholar] [CrossRef]
- Majumder, R.; Ledwich, G.; Ghosh, A. Droop control of converter-interfaced microsources in rural distributed generation. IEEE Trans. Power Deliv. 2010, 25, 2768–2778. [Google Scholar] [CrossRef] [Green Version]
- Majumder, R.; Chaudhuri, B.; Ghosh, A. Improvement of stability and load sharing in an autonomous microgrid using supplementary droop control loop. IEEE Trans. Power Syst. 2010, 25, 796–808. [Google Scholar] [CrossRef]
- Heuck, K.; Dettmann, K.D.; Reuter, E. Elektrische Energieversorgung; Vieweg: Berlin, Germany, 1991. (In German) [Google Scholar]
- Engler, A.; Soultanis, N. Droop control in LV-grids. In Proceedings of the 2005 International Conference on Future Power Systems, Amsterdam, The Netherlands, 16–18 November 2005.
- Mohamed, Y.; El-Saadany, E.F. Adaptive decentralized droop controller to preserve power sharing stability of paralleled inverters in distributed generation microgrids. IEEE Trans. Power Electron. 2008, 23, 2806–2816. [Google Scholar] [CrossRef]
- Sao, C.K.; Lehn, P.W. Autonomous load sharing of voltage source converters. IEEE Trans. Power Deliv. 2005, 20, 1009–1016. [Google Scholar] [CrossRef]
- Shintai, T.; Miura, Y.; Ise, T. Oscillation damping of a distributed generator using a virtual synchronous generator. IEEE Trans. Power Deliv. 2014, 29, 668–676. [Google Scholar] [CrossRef]
- Jan, M.; Janusz, W.B.; James, R.B. Power System Dynamics: Stability, and Control; Wiley: Chichester, UK, 2008. [Google Scholar]
- Rokrok, E.; Golshan, M.E.H. Adaptive voltage droop scheme for voltage source converters in an islanded multi-bus microgrid. IET Gener. Transm. Distrib. 2010, 4, 562–578. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Reactive power sharing in islanded microgrids using adaptive voltage droop control. IEEE Trans. Smart Grid 2015, 6, 3052–3060. [Google Scholar] [CrossRef]
- He, J.; Li, Y.W. An enhanced microgrid load demand sharing strategy. IEEE Trans. Power Electron. 2012, 27, 3984–3995. [Google Scholar] [CrossRef]
- Lee, C.T.; Chu, C.C.; Cheng, P.T. A new droop control method for the autonomous operation of distributed energy resource interface converters. IEEE Trans. Power Electron. 2013, 28, 1980–1993. [Google Scholar] [CrossRef]
- Han, H.; Liu, Y.; Sun, Y.; Su, M.; Guerrero, J.M. An improved droop control strategy for reactive power sharing in islanded microgrid. IEEE Trans. Power Electron. 2015, 30, 3133–3141. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhuo, F.; Wang, F.; Liu, B.; Gou, R.; Zhao, Y. A virtual impedance optimization method for reactive power sharing in networked microgrid. IEEE Trans. Power Electron. 2016, 31, 2890–2904. [Google Scholar] [CrossRef]
- Mahmood, H.; Michaelson, D.; Jiang, J. Accurate reactive power sharing in an islanded microgrid using adaptive virtual impedances. IEEE Trans. Power Electron. 2015, 30, 1605–1617. [Google Scholar] [CrossRef]
- Milczarek, A.; Malinowski, M.; Guerrero, J.M. Reactive power management in islanded microgrid—Proportional power sharing in hierarchical droop control. IEEE Trans. Smart Grid 2015, 6, 1631–1638. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Line | Line Resistance R (Ω/km) | Line Reactance X (Ω/km) | Ratio of |
|---|---|---|---|
| Low voltage line | 0.642 | 0.083 | 7.7 |
| Medium voltage line | 0.161 | 0.190 | 0.85 |
| High voltage line | 0.06 | 0.191 | 0.31 |
| Cases | P-ω Droop Gain m (rad/W·s) | Q-V Droop Gain n (V/Var) | Virtual Resistance (Ω) | Line Characters (Ω) | Load Characters (Ω) | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| DG1 (10−5) | DG2 (10−5) | DG1 (10−3) | DG2 (10−3) | DG1 | DG2 | DG1 | DG2 | 0–0.7 s, 1.4–2 s | 0.7–1.4 s | |
| Case A | 6.28 | 6.28 | 1 | 1 | 0 | 0 | 0.2 | 0.3 | 6 + j6 | 4 + j4 |
| Case B | 6.28 | 6.28 | 1 | 1 | 0.1 | 0 | 0.2 | 0.3 | 6 + j6 | 4 + j4 |
| Case C | 6.28 | 15.6 | 1 | 2 | 0 | 0.1 | 0.2 | 0.3 | 6 + j6 | 4 + j4 |
| Case D | 6.28 | 6.28 | 1 | 1 | 0 | 0 | 0.2 | 0.3 | 6 − j6 | 4 − j4 |
| Case E | 6.28 | 6.28 | 1 | 1 | 0.1 | 0 | 0.2 | 0.3 | 6 − j6 | 4 − j4 |
| Case F | 6.28 | 6.28 | 1 | 1 | 0.13 | 0 | 0.2568 + j0.0332 | 0.3852 + j0.0498 | 6 + j6 | 4 + j4 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, X.; Sun, Y.; Yuan, W.; Han, H.; Zhong, C.; Guerrero, J.M. Conventional P-ω/Q-V Droop Control in Highly Resistive Line of Low-Voltage Converter-Based AC Microgrid. Energies 2016, 9, 943. https://doi.org/10.3390/en9110943
Hou X, Sun Y, Yuan W, Han H, Zhong C, Guerrero JM. Conventional P-ω/Q-V Droop Control in Highly Resistive Line of Low-Voltage Converter-Based AC Microgrid. Energies. 2016; 9(11):943. https://doi.org/10.3390/en9110943
Chicago/Turabian StyleHou, Xiaochao, Yao Sun, Wenbin Yuan, Hua Han, Chaolu Zhong, and Josep M. Guerrero. 2016. "Conventional P-ω/Q-V Droop Control in Highly Resistive Line of Low-Voltage Converter-Based AC Microgrid" Energies 9, no. 11: 943. https://doi.org/10.3390/en9110943