
An Optimal PR Control Strategy with Load Current Observer for a Three-Phase Voltage Source Inverter

Abstract
:
1. Introduction
2. Mathematical Model
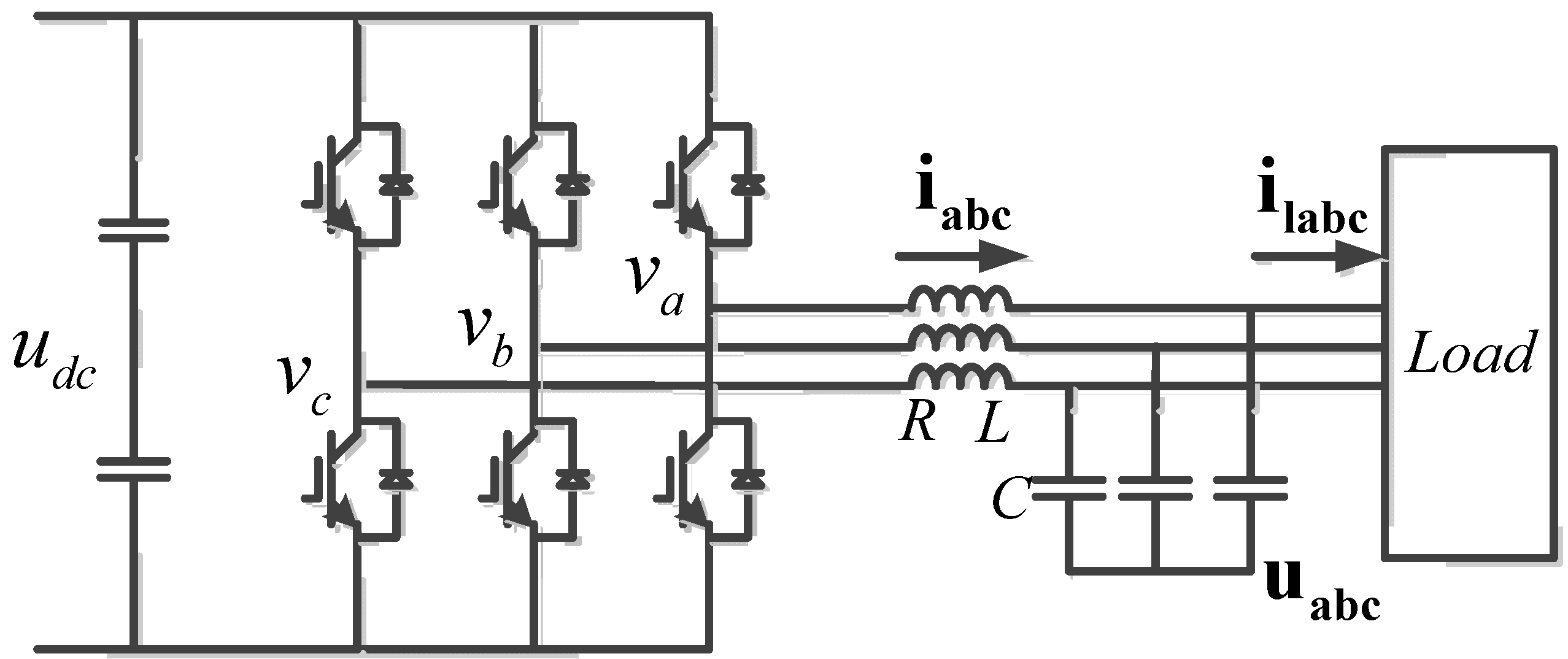
2.1. Model of Three-Phase Inverter
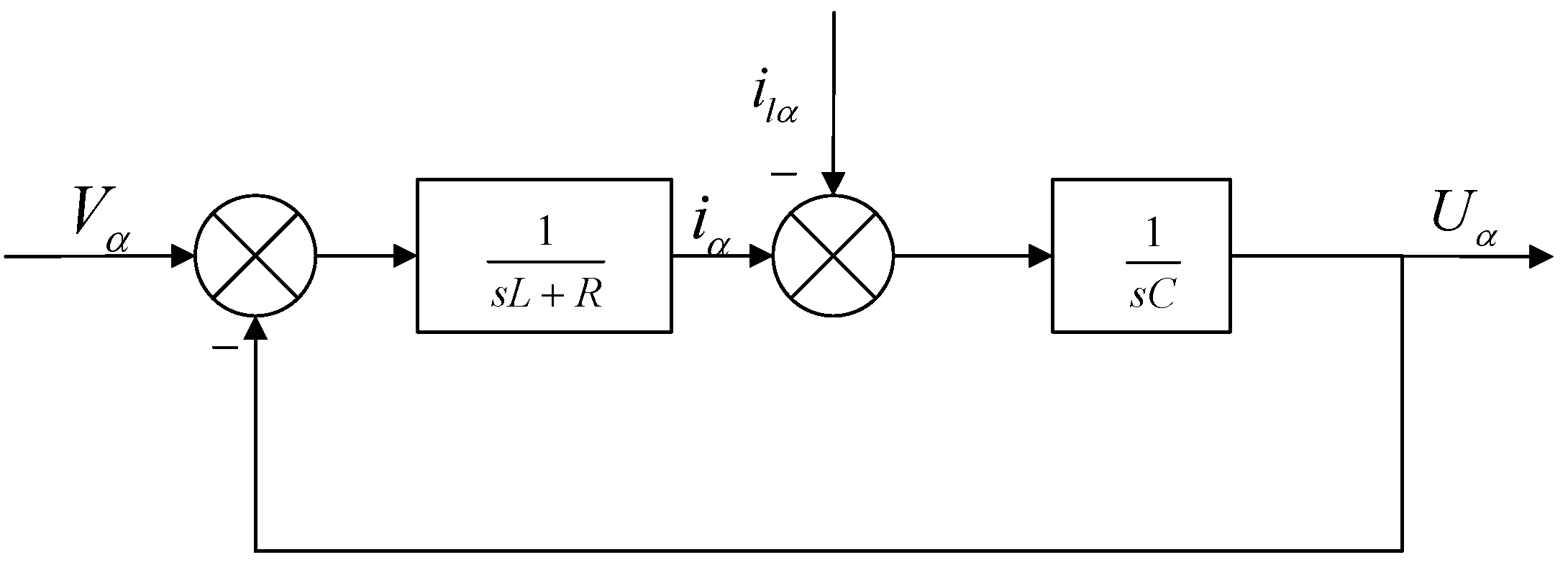
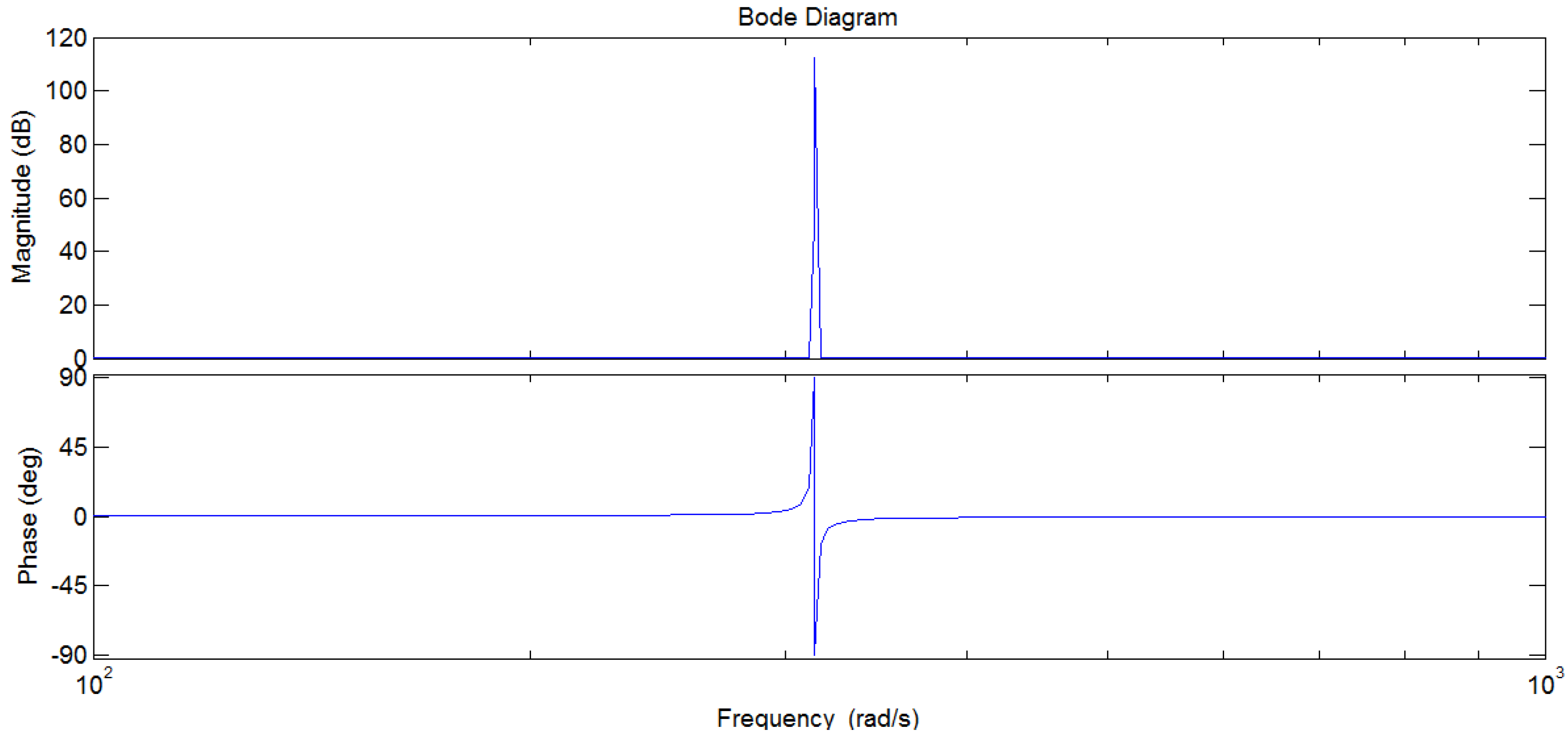
2.2. Model of PR Regulator
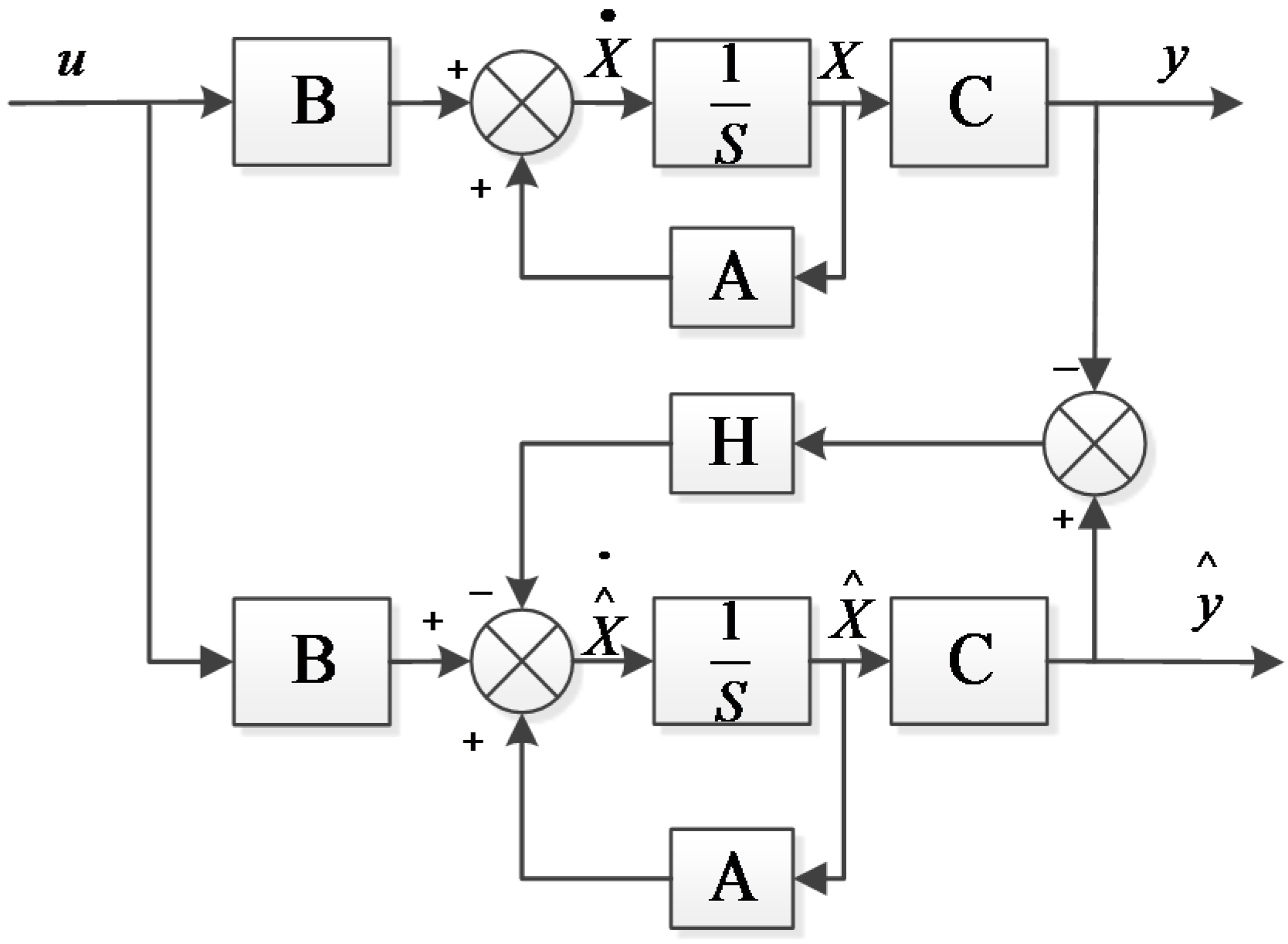
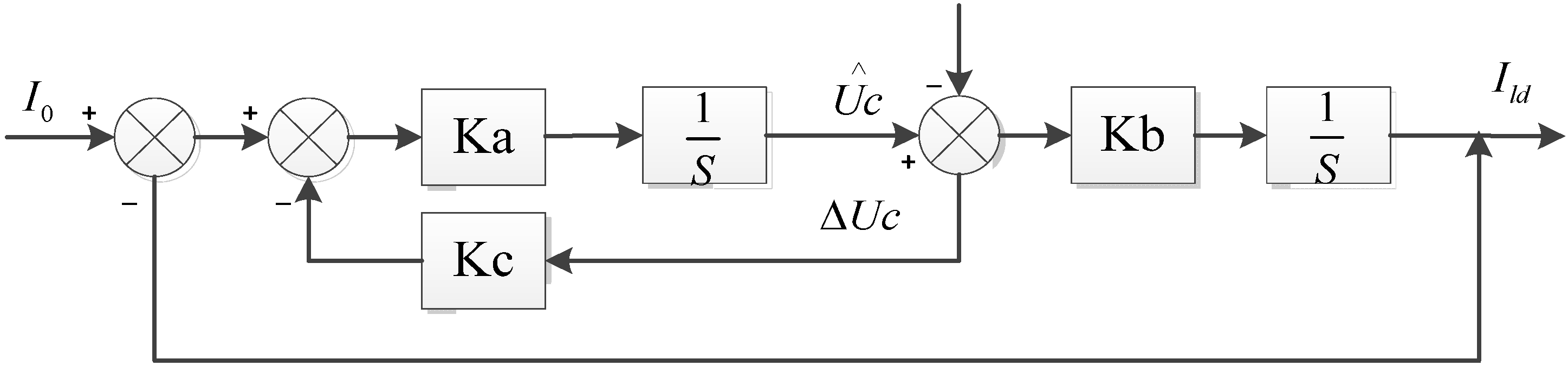
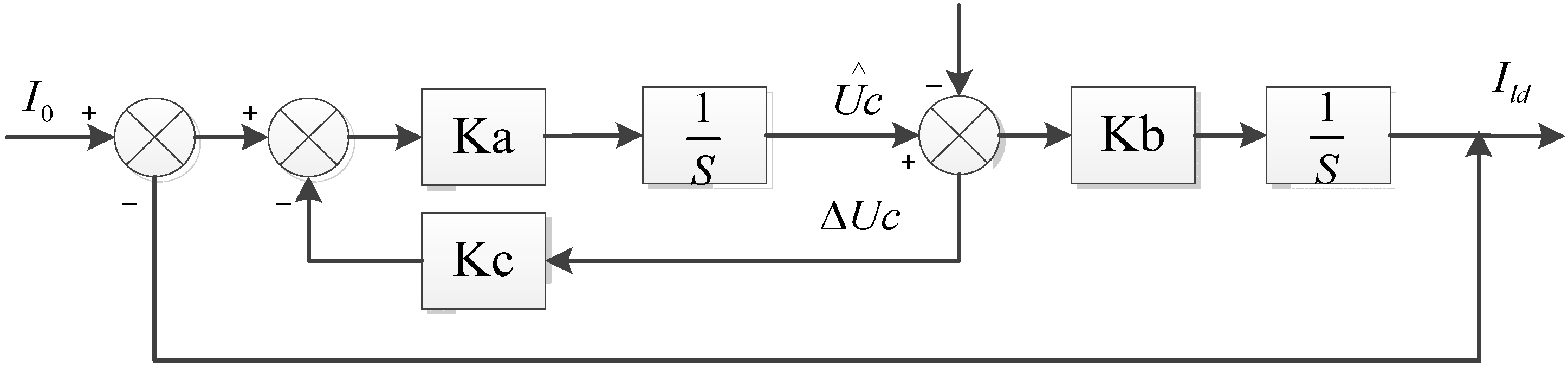
2.3. Model of Load Current Observer (LCO)
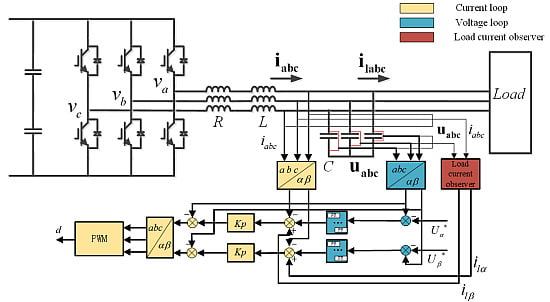
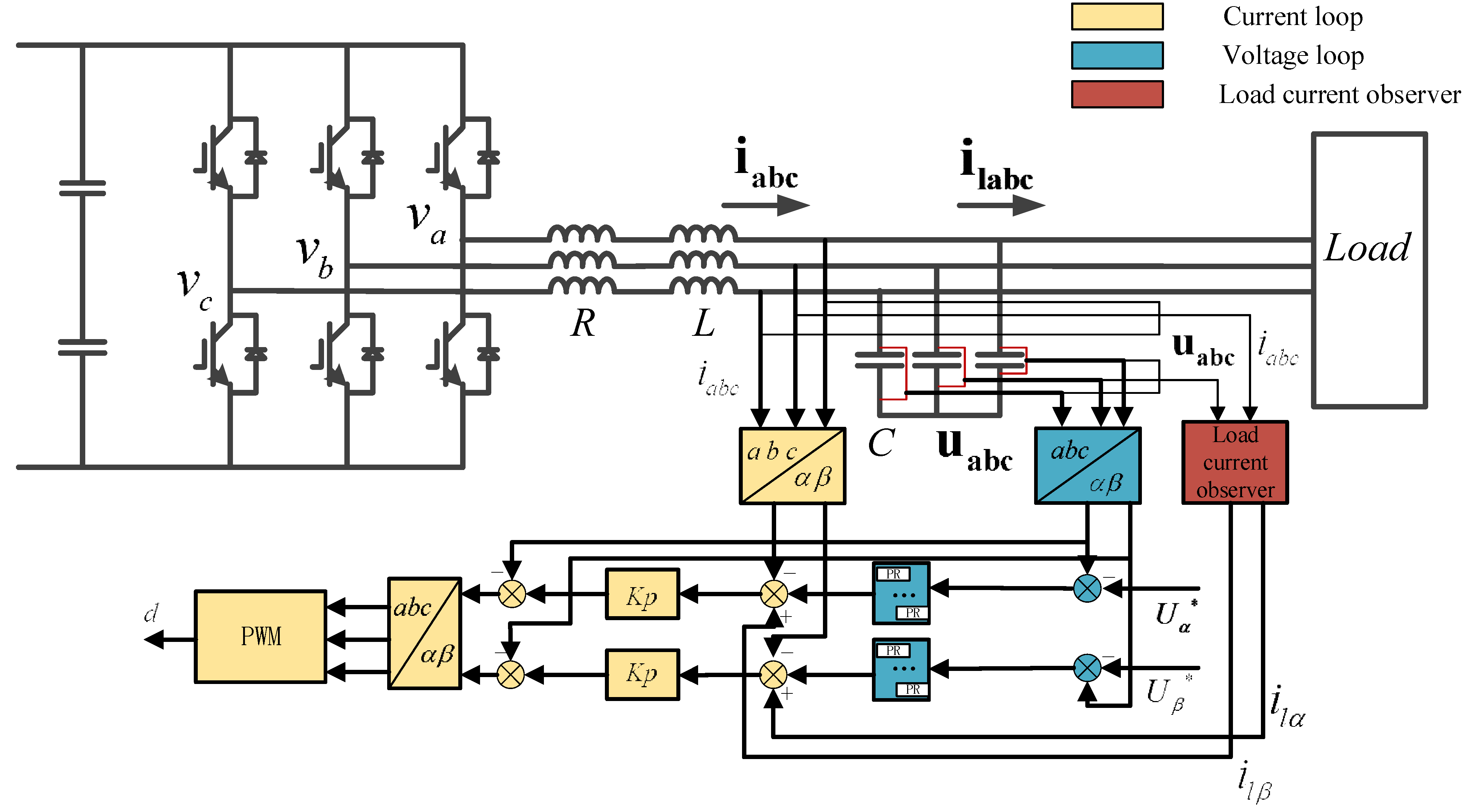
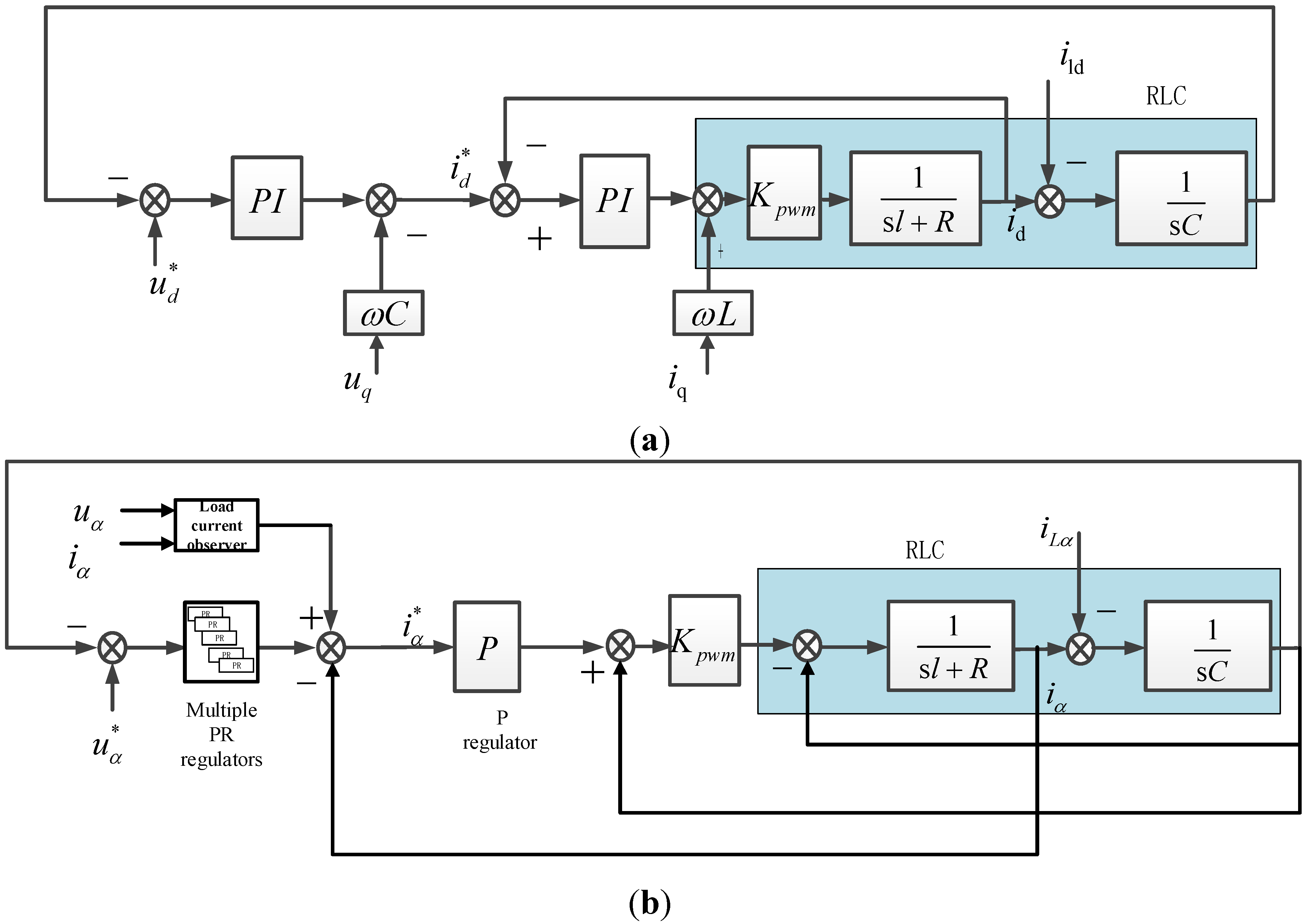
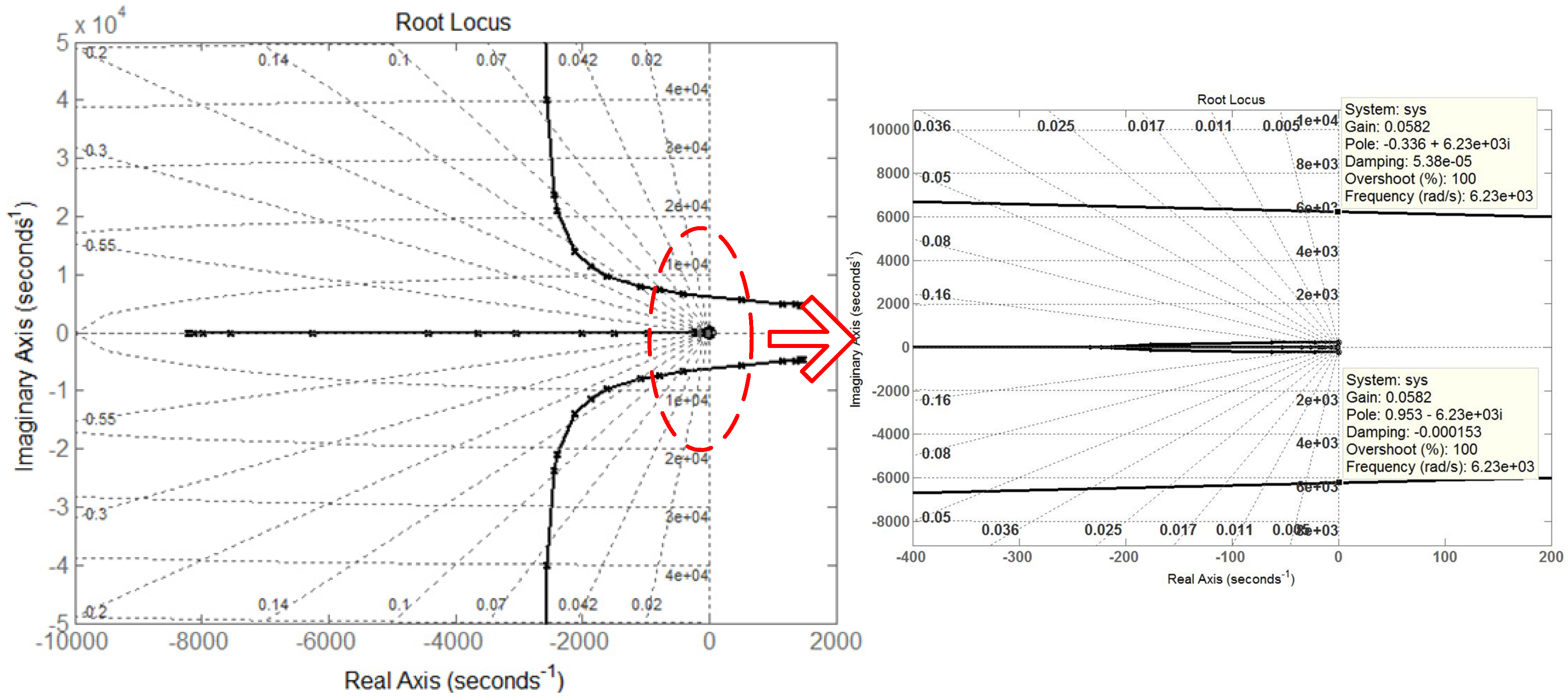
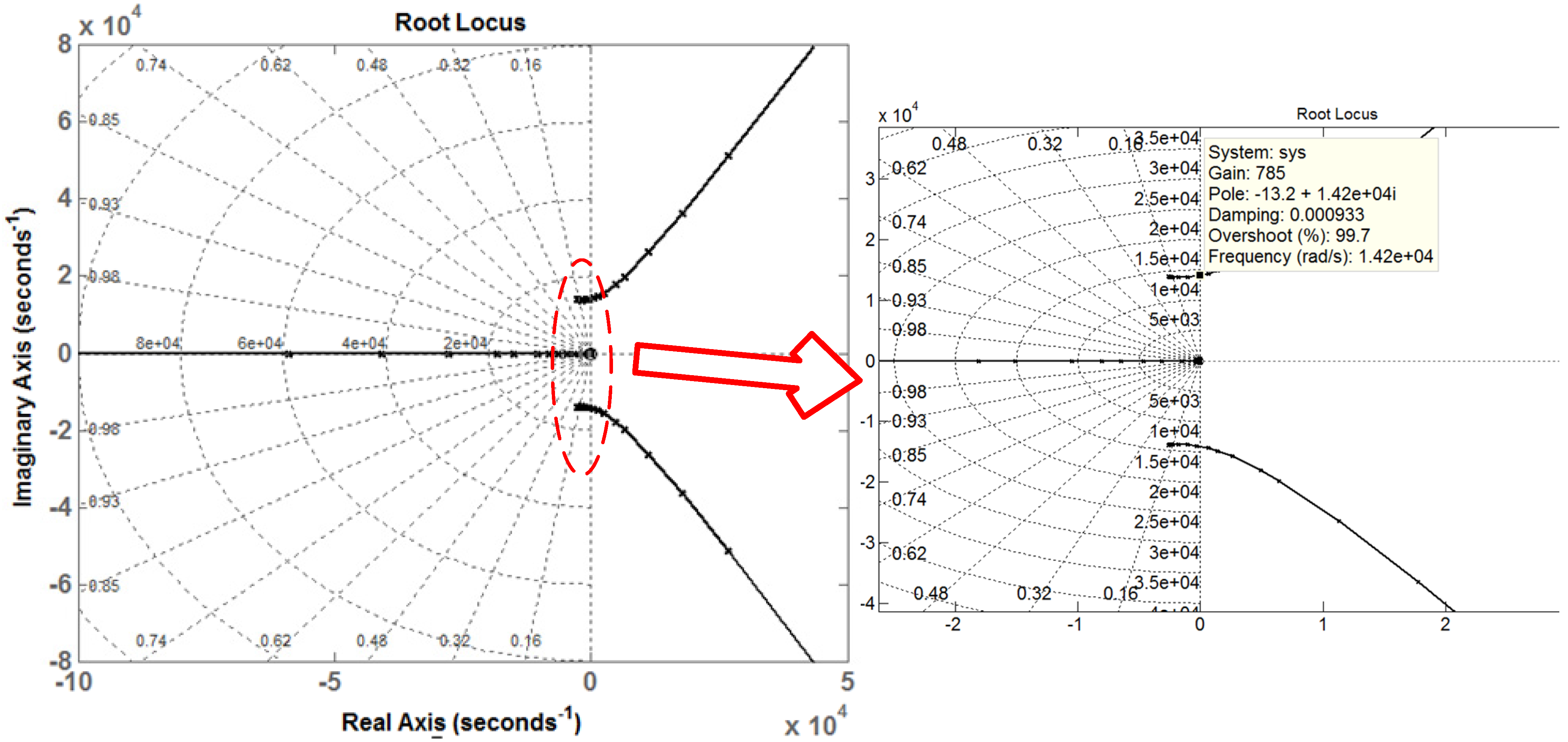
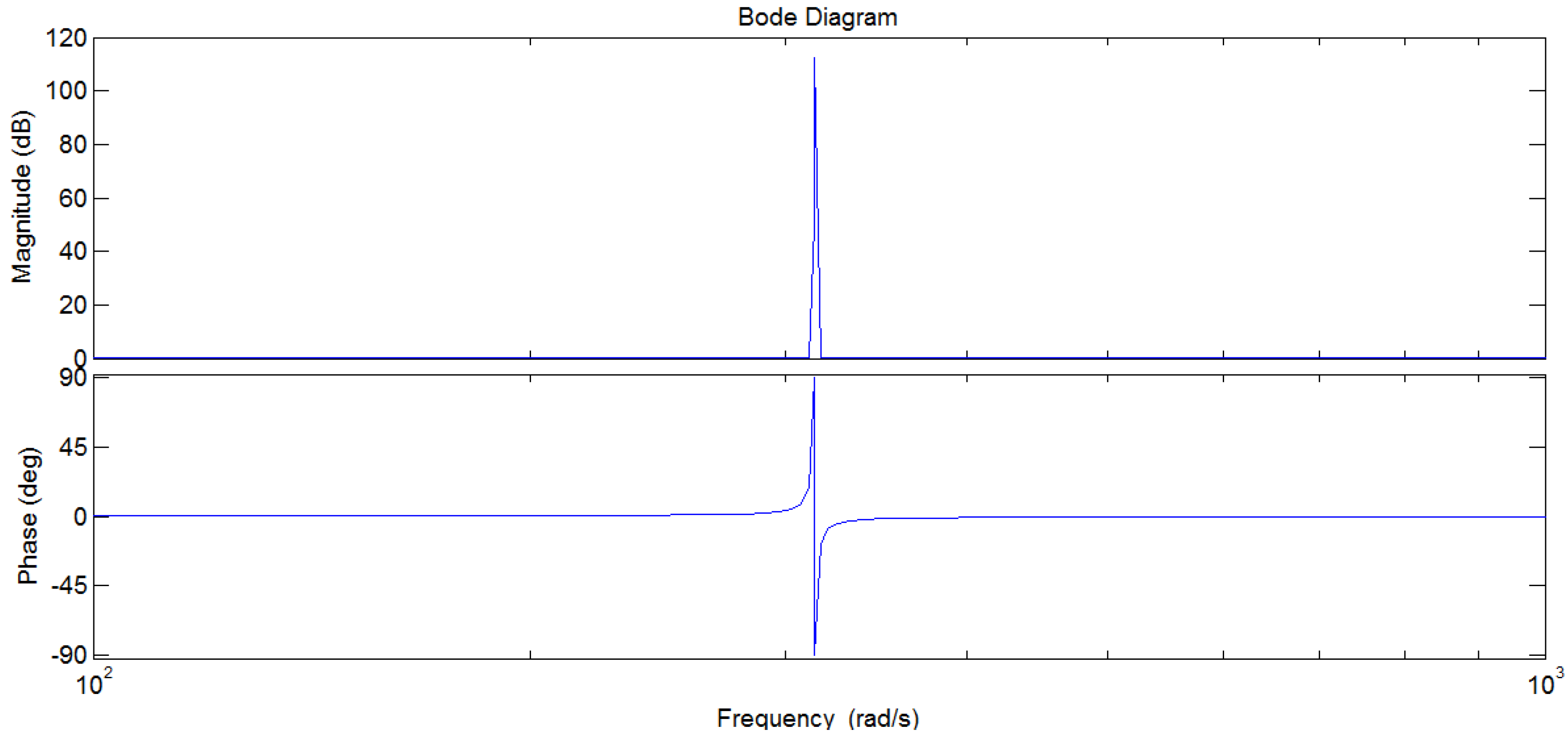
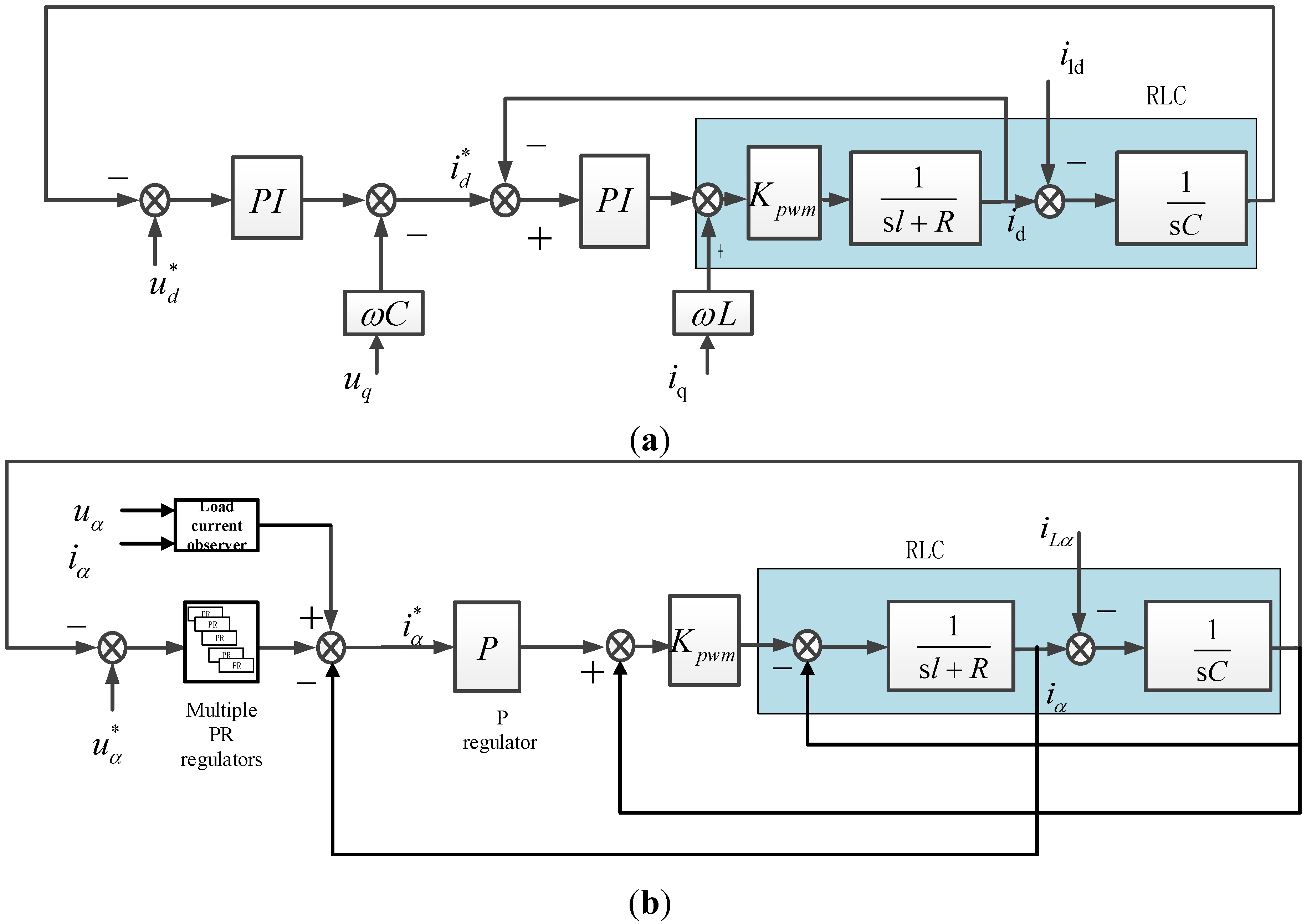
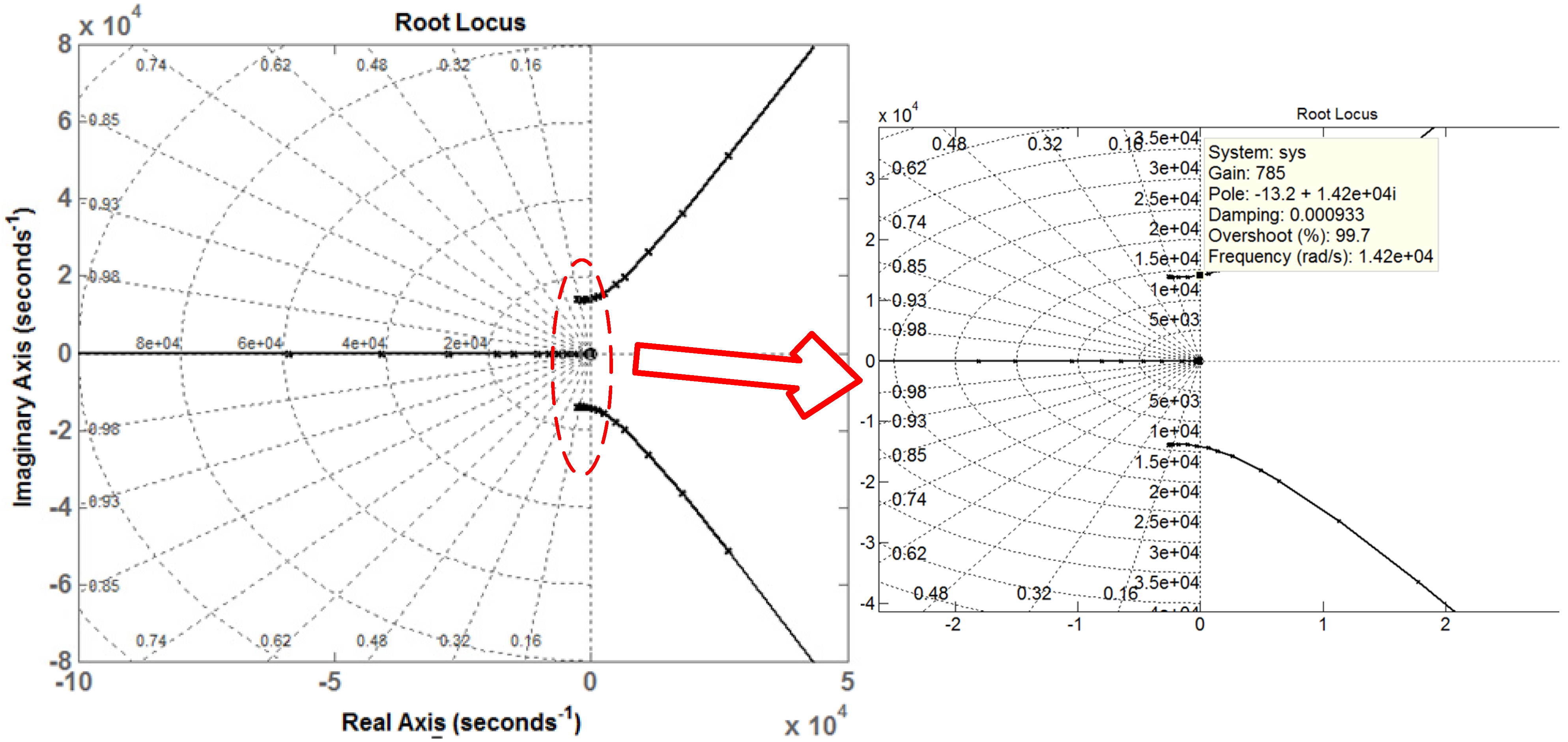
3. Control Structure and Parameters Design

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 0.3 | |
| 150 | |
| 100 | |
| 20 | |
| 80 | |
| 5 | |
| P | 15 |
| Parameters | Value |
|---|---|
| DC-link voltage | 700 V |
| Output voltage | 220 V |
| Output frequency | 50 Hz |
| Switching and Sampling frequency | 12,800 Hz |
| Output Filter R | 0.5 Ω |
| Output Filter L | 2 mH |
| Output Filter C | 15 uF |

4. Simulation and Laboratory Experiments
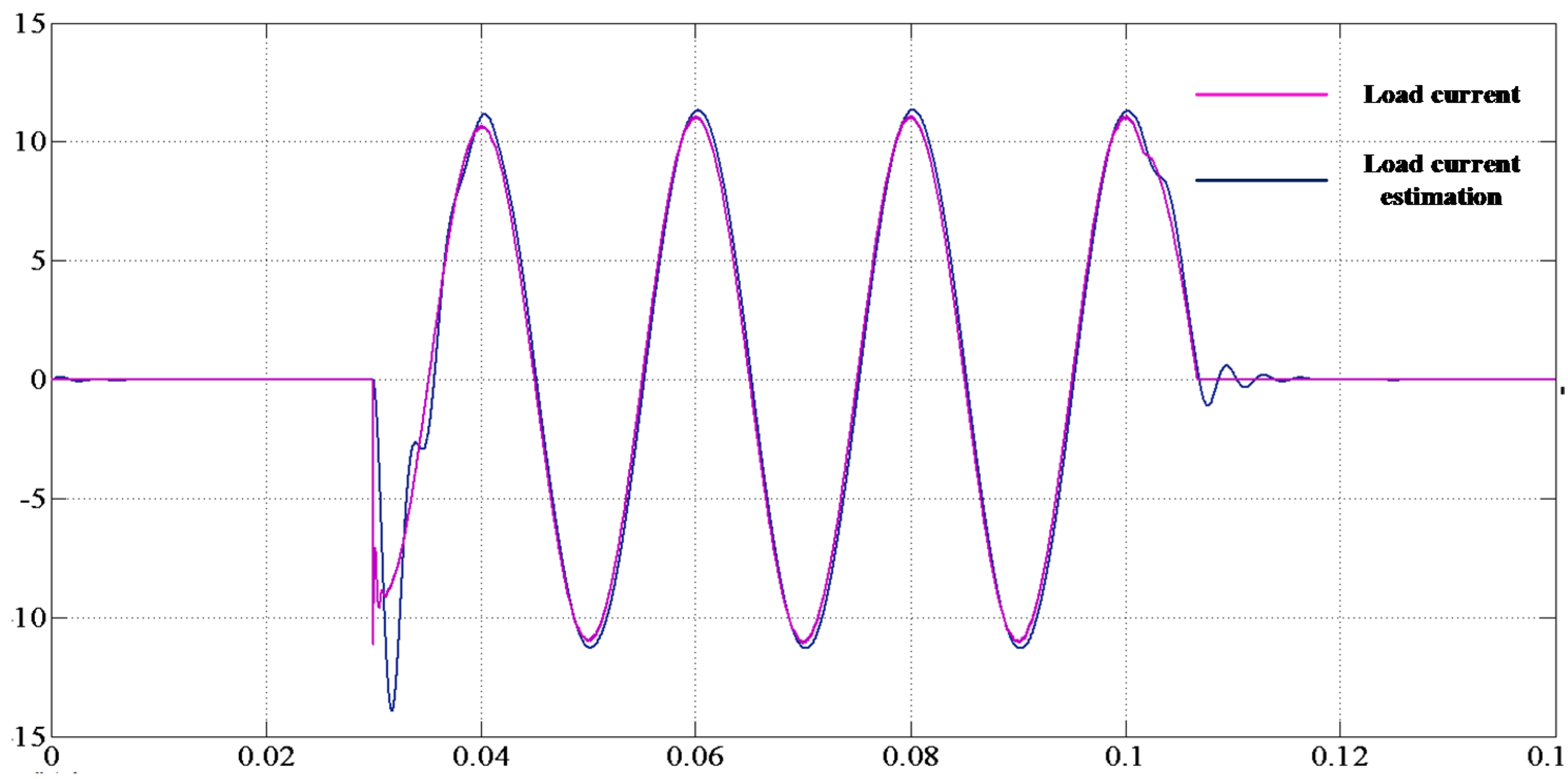
4.1. Simulation Study
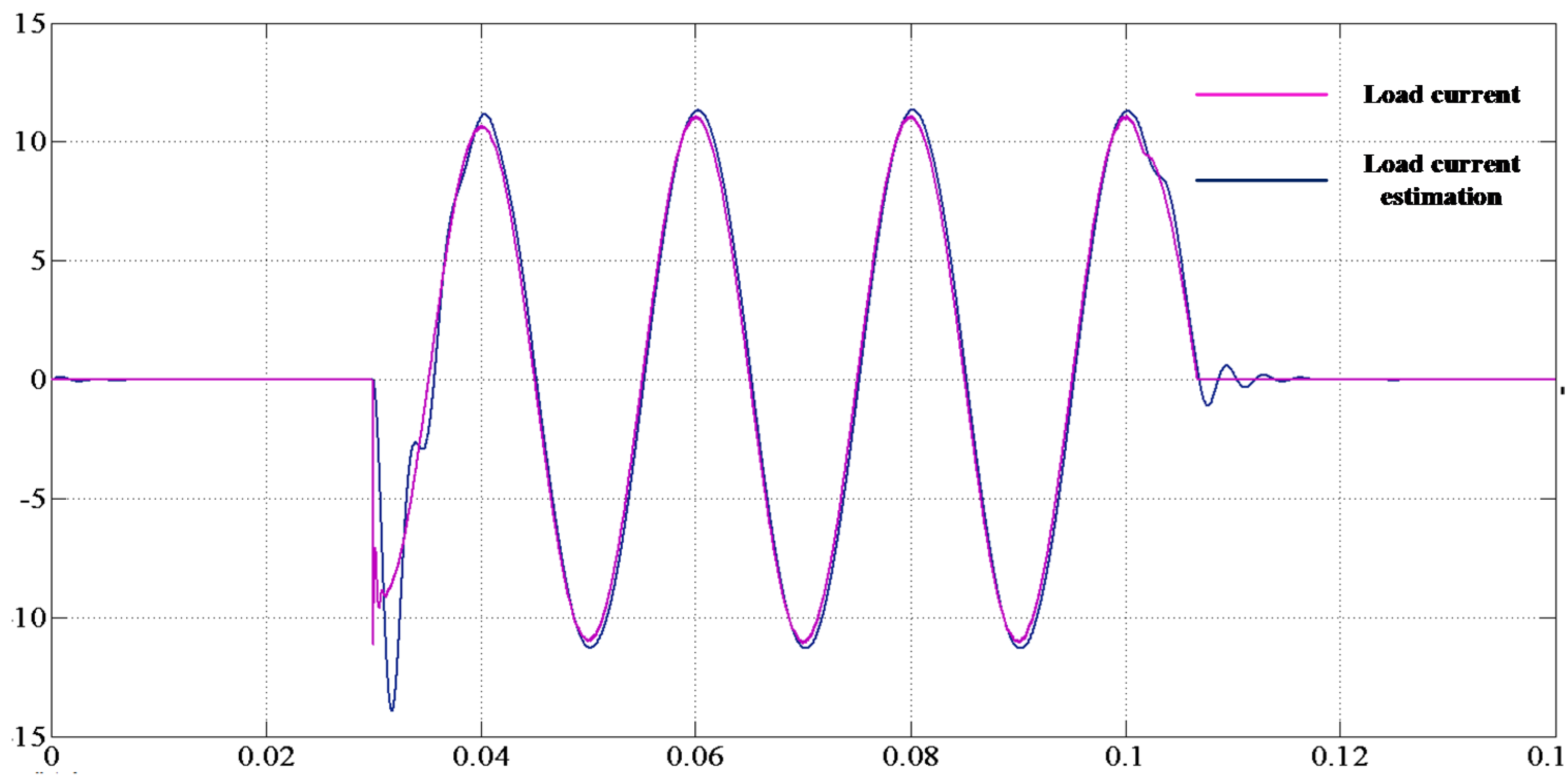
- Scenario 1: The balanced resistive load is applied to the inverter output terminals at 0.03 s and then cut off at 0.1 s.
- Scenario 2: The unbalanced resistive load is applied to the inverter output terminals at 0.03 s and then cut off at 0.1 s.
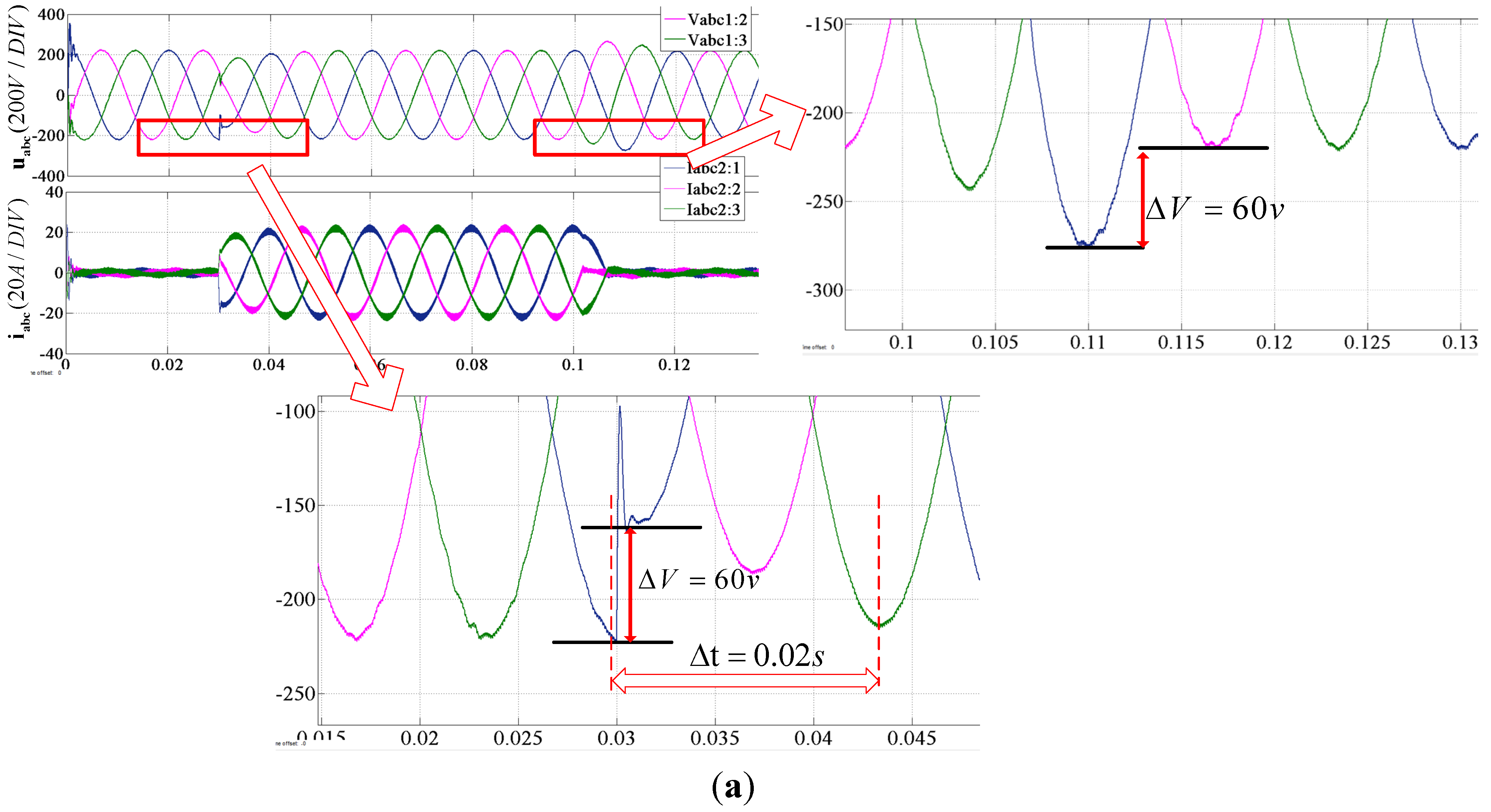
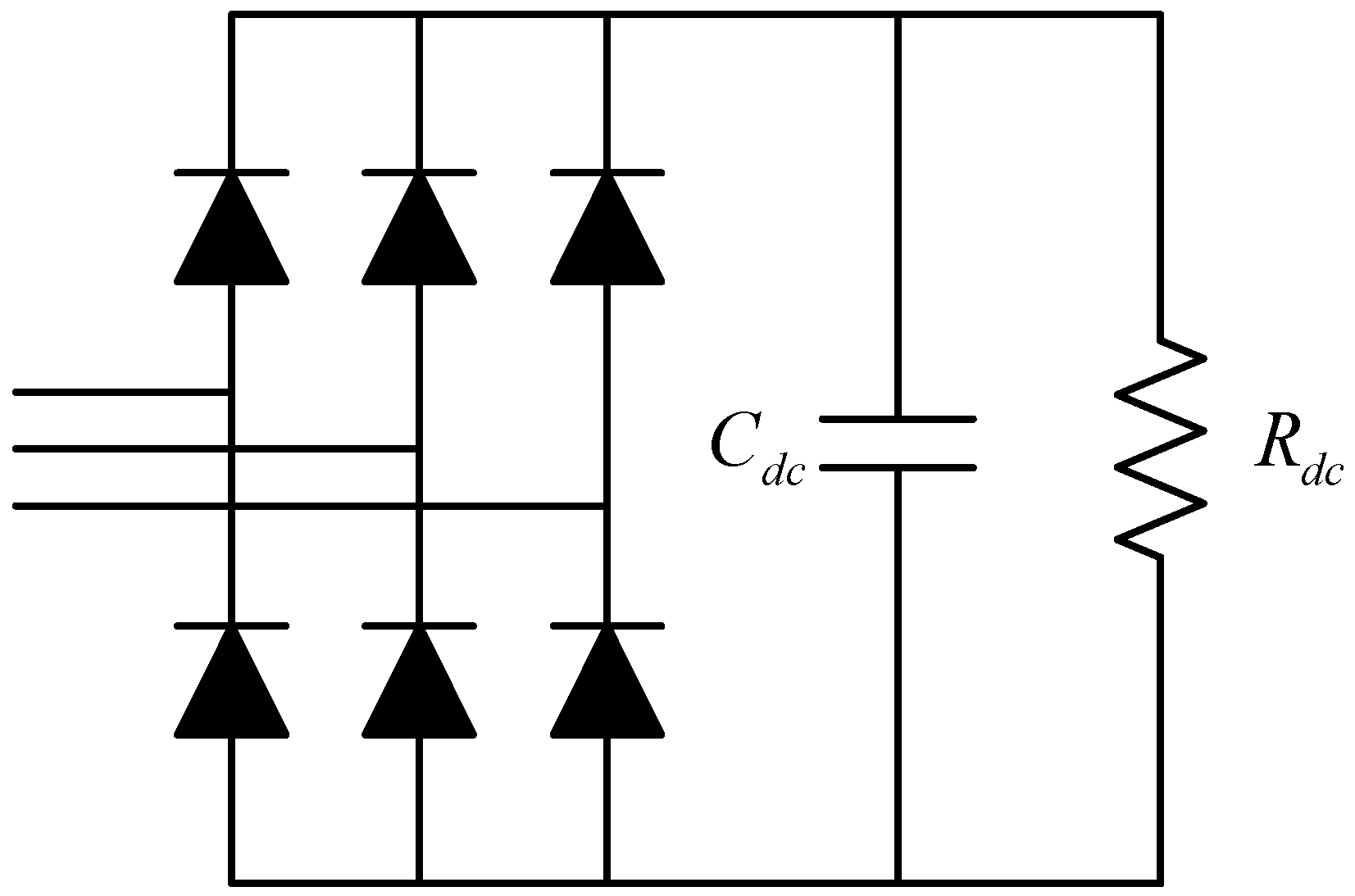
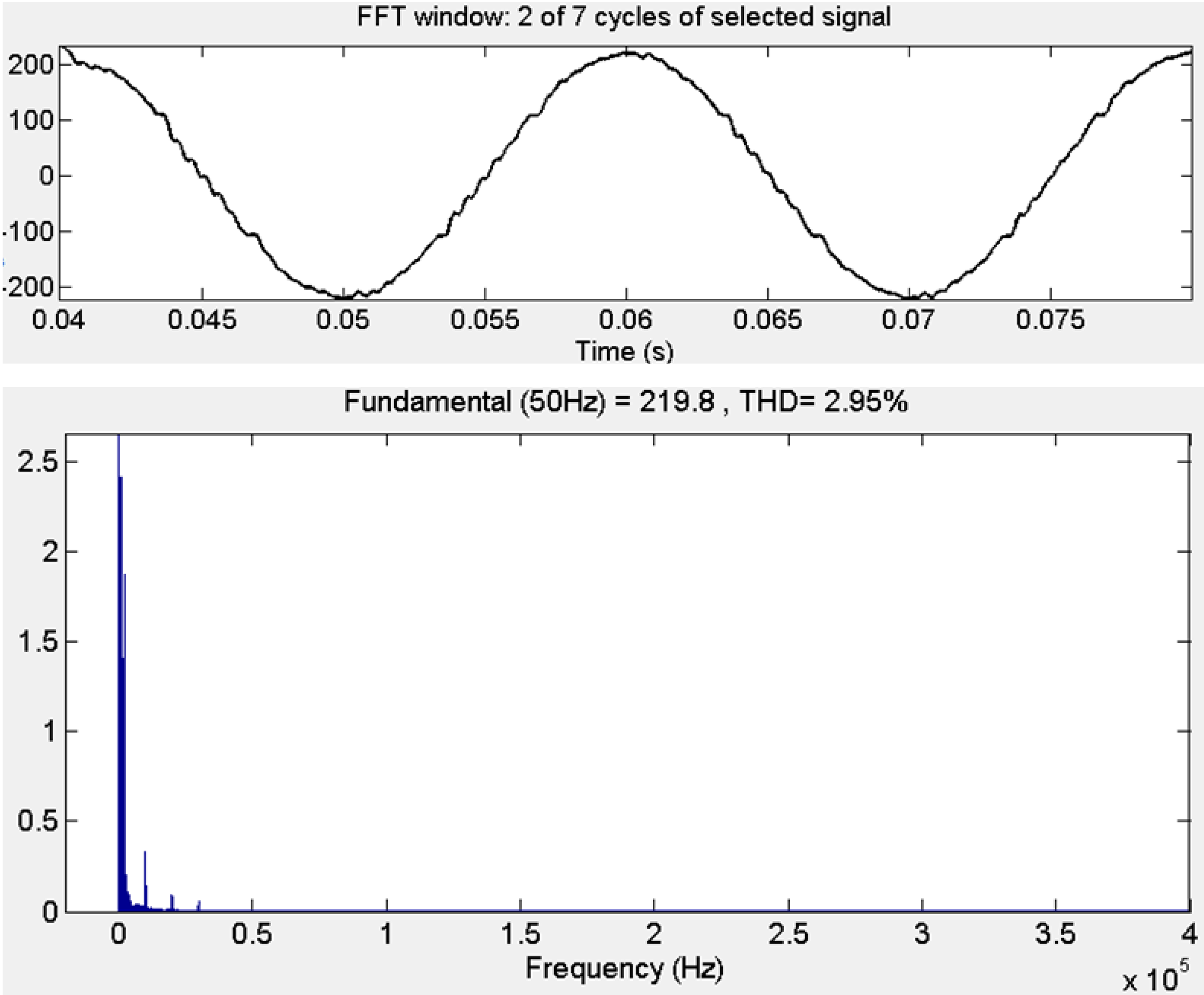
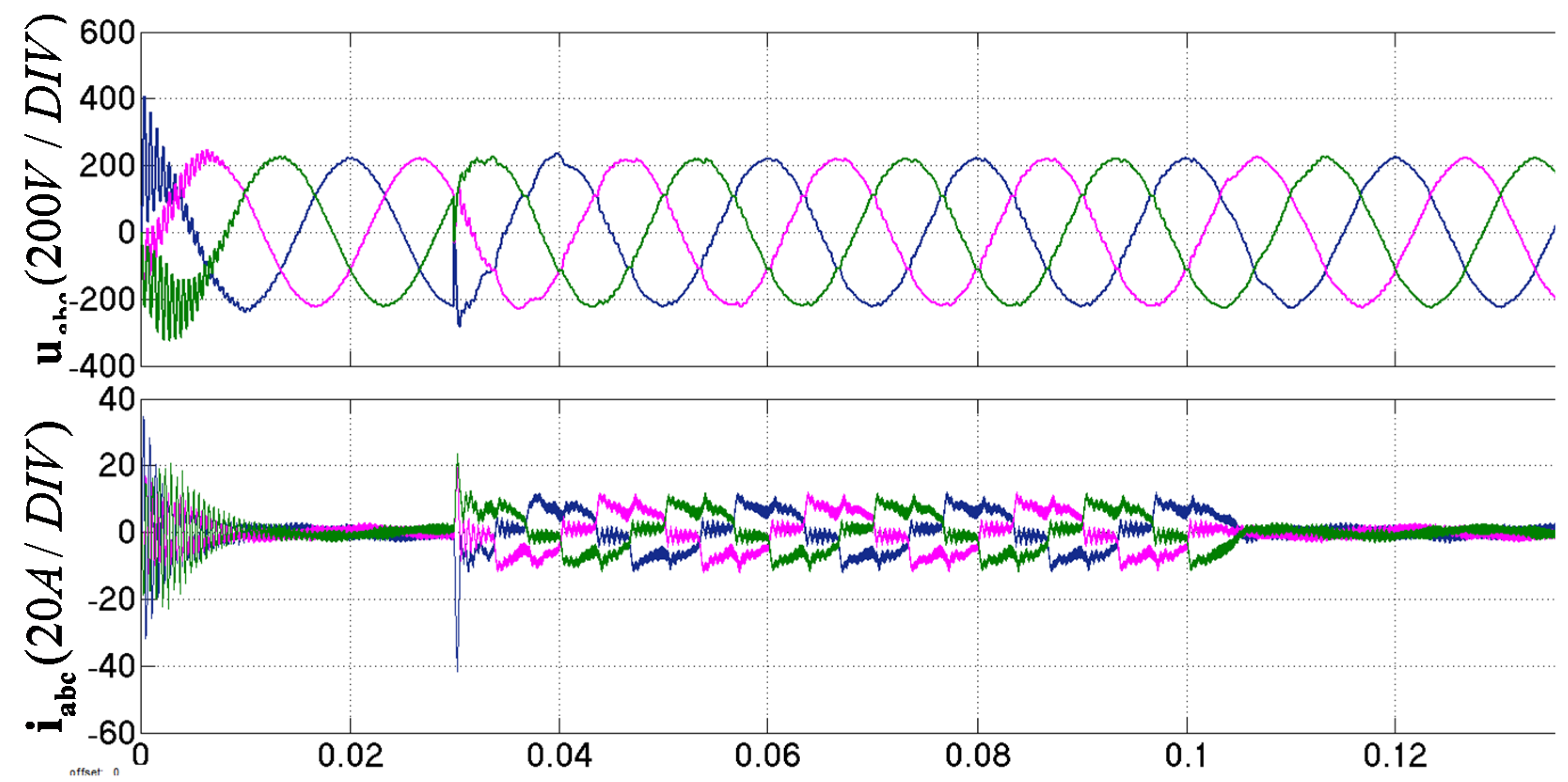
- Scenario 3: The nonlinear resistive load is applied to the inverter output terminals at 0.03 s and then cut off at 0.1 s.

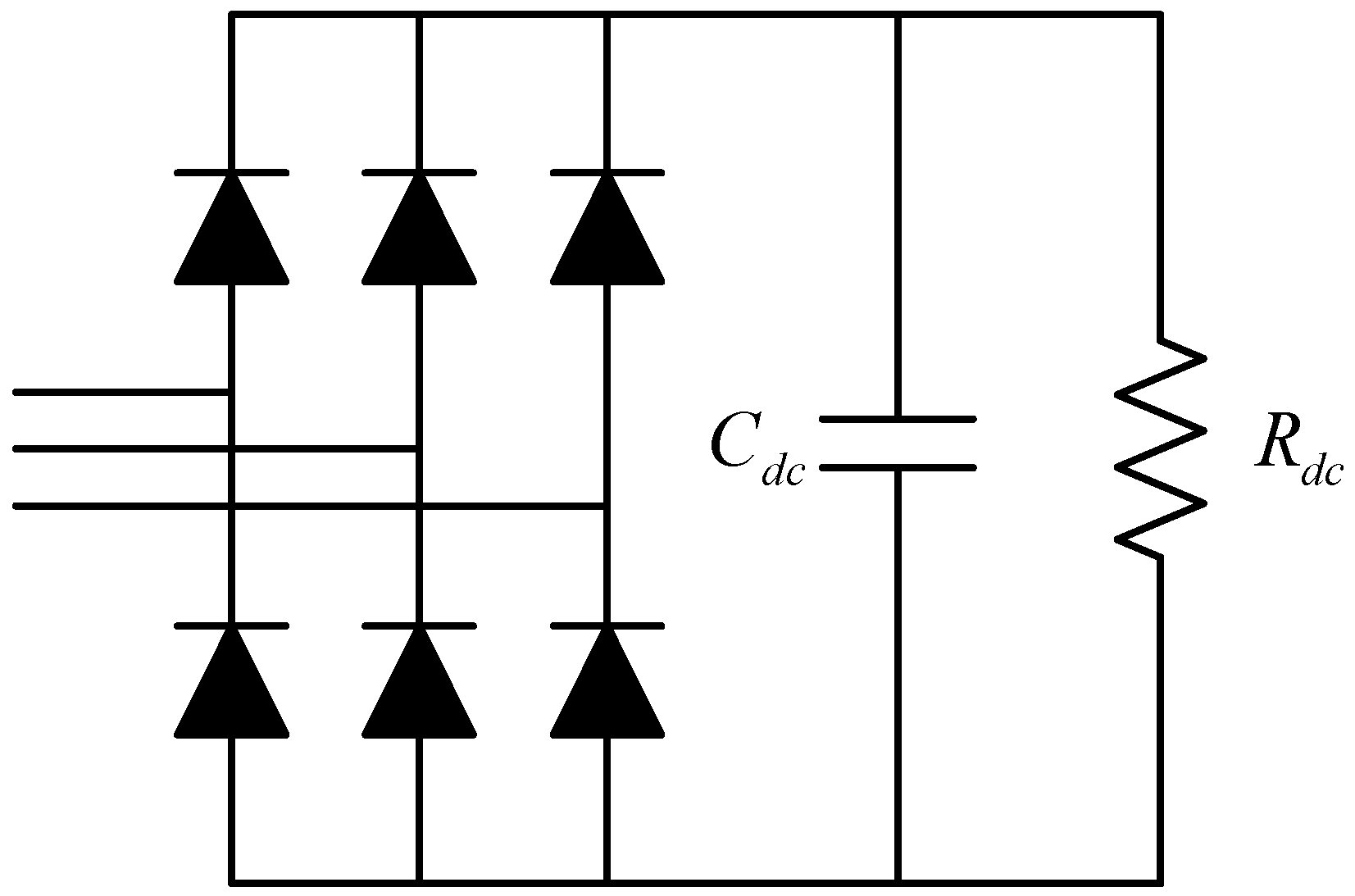
| Items | Value |
|---|---|
| 50 Ω | |
| 20 µF |
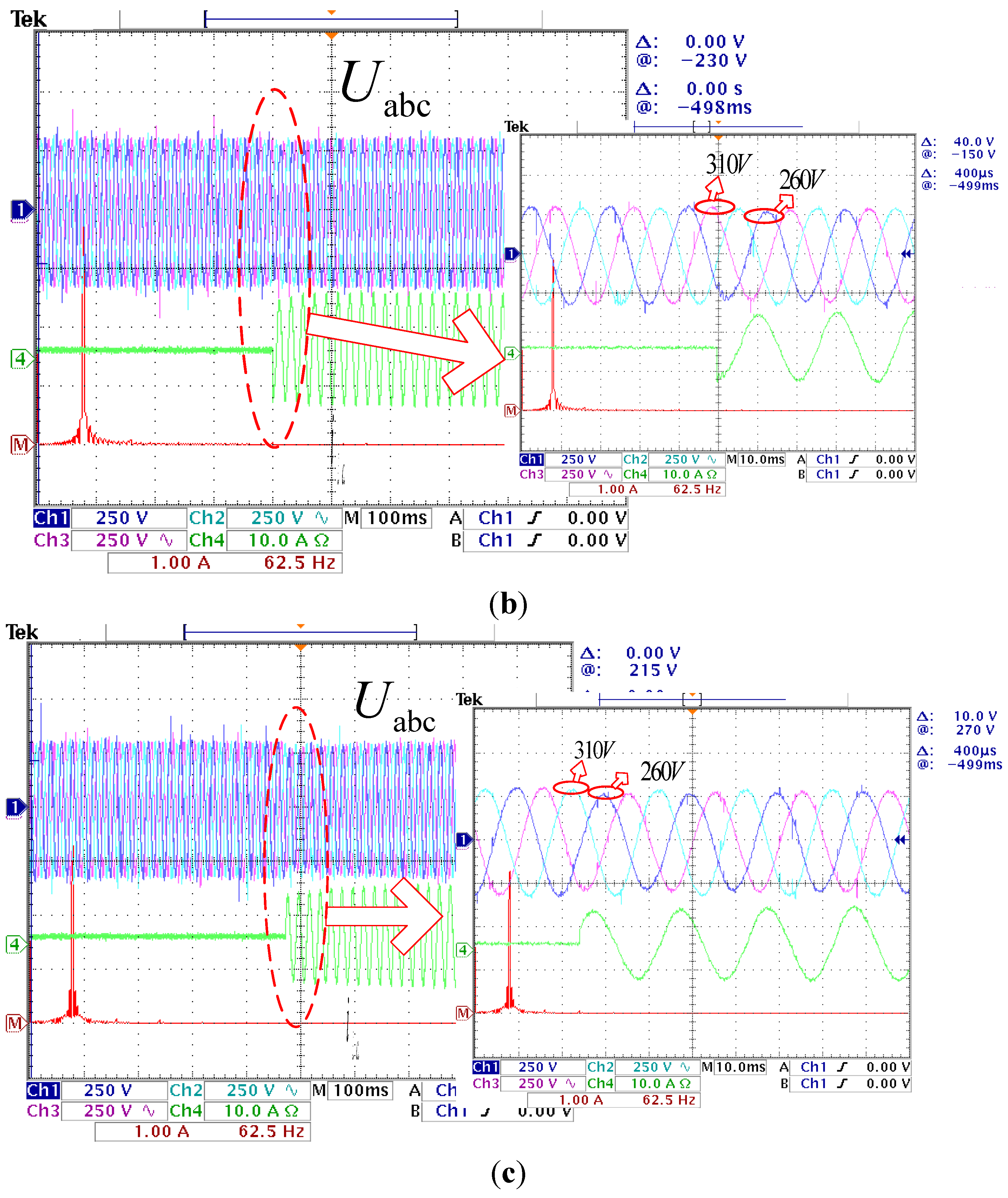
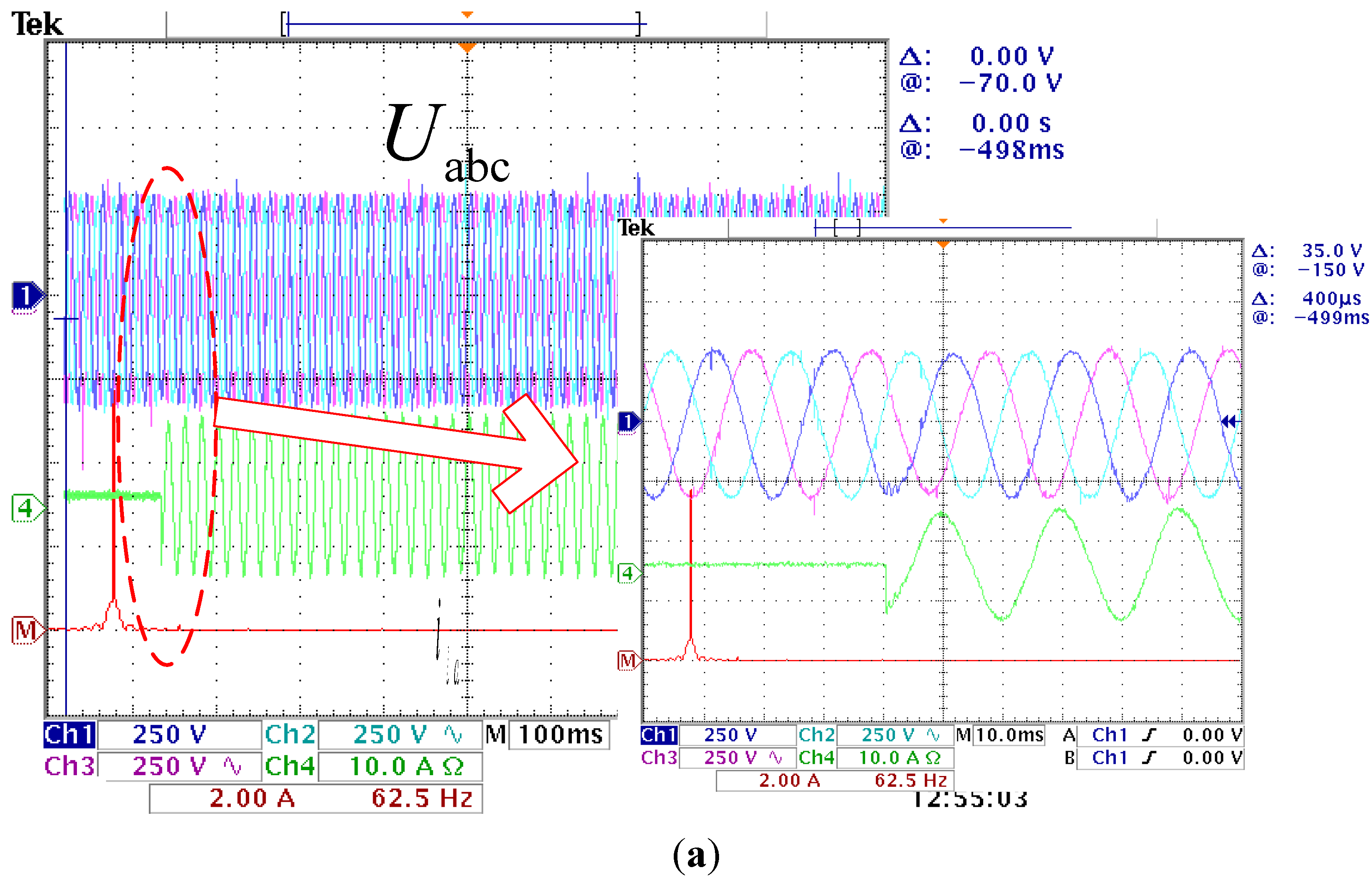
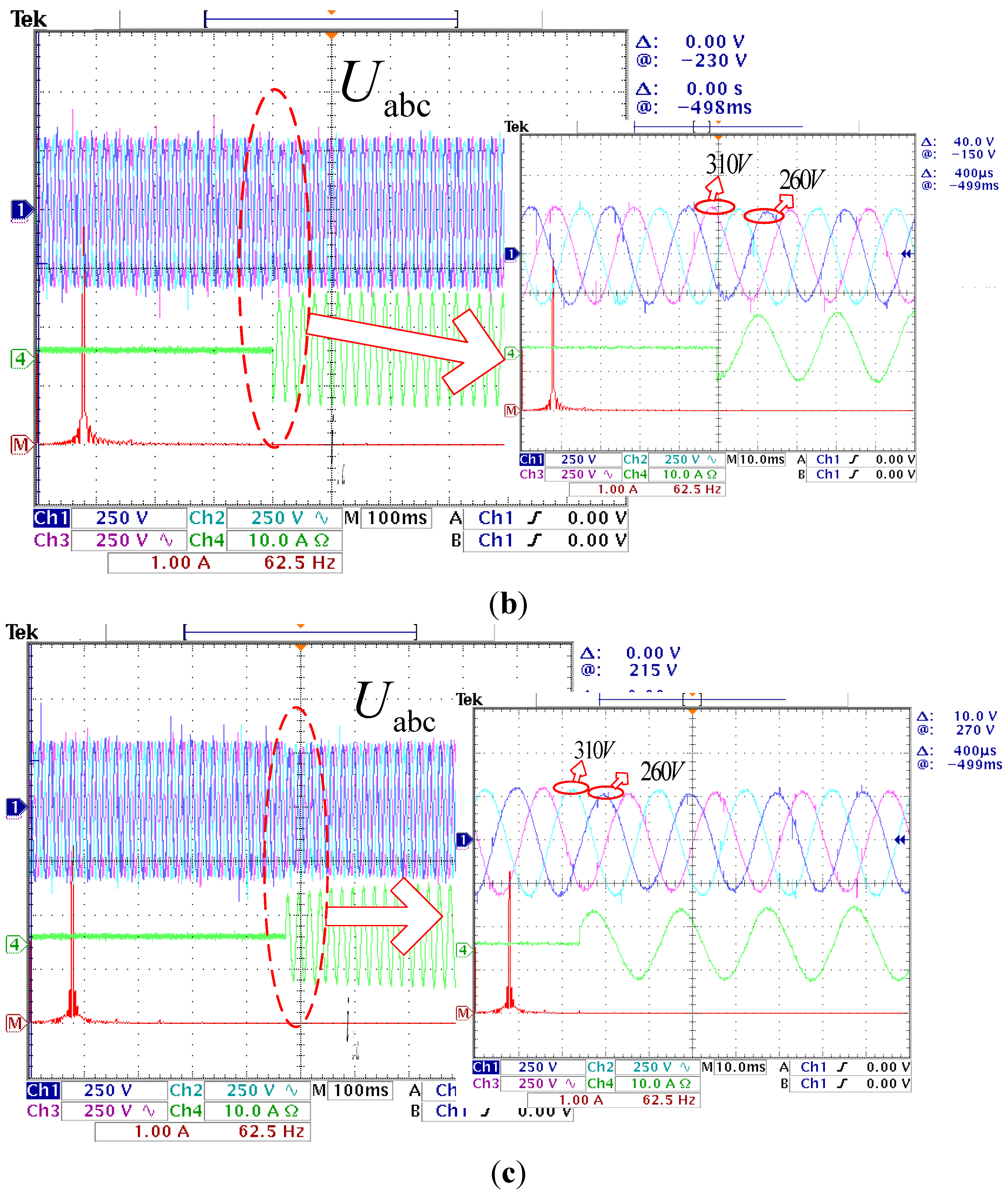
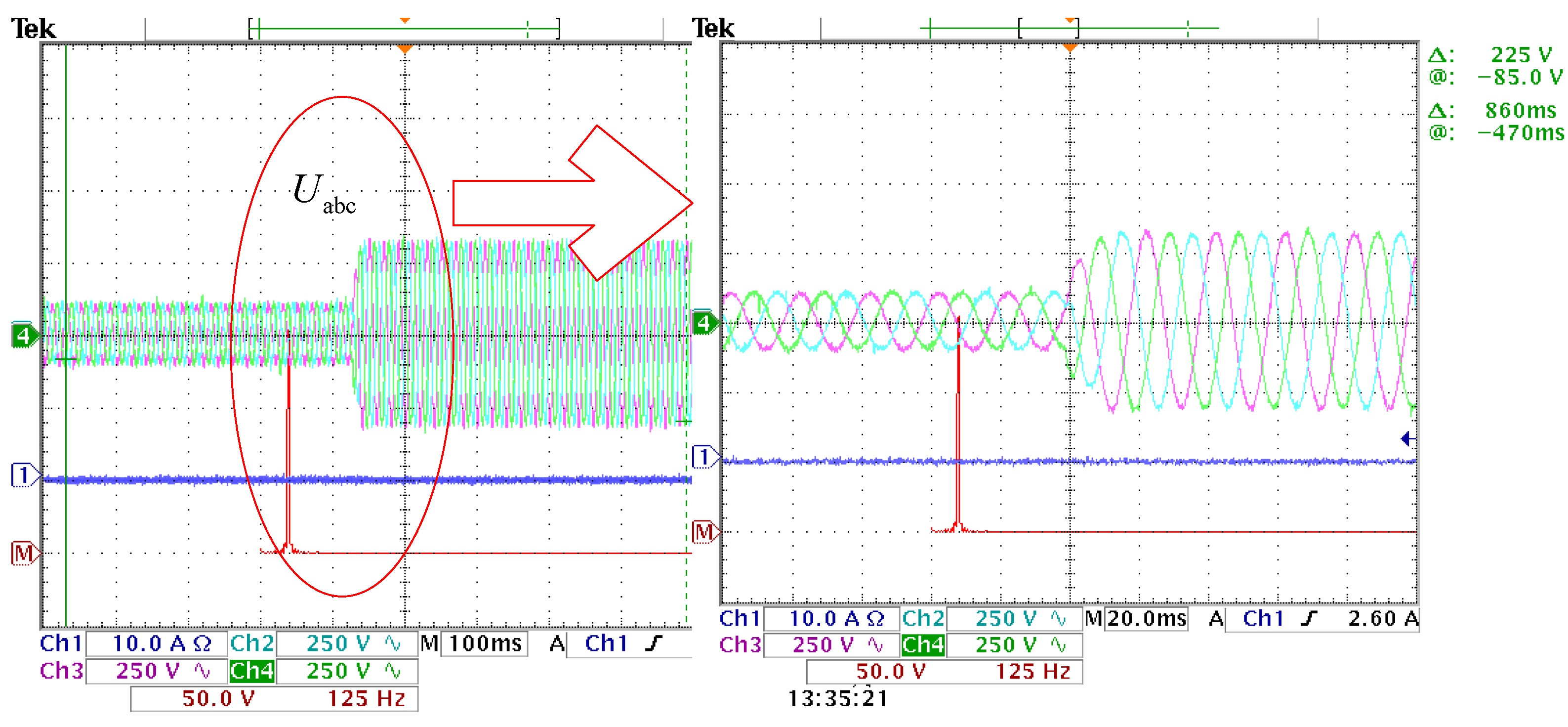
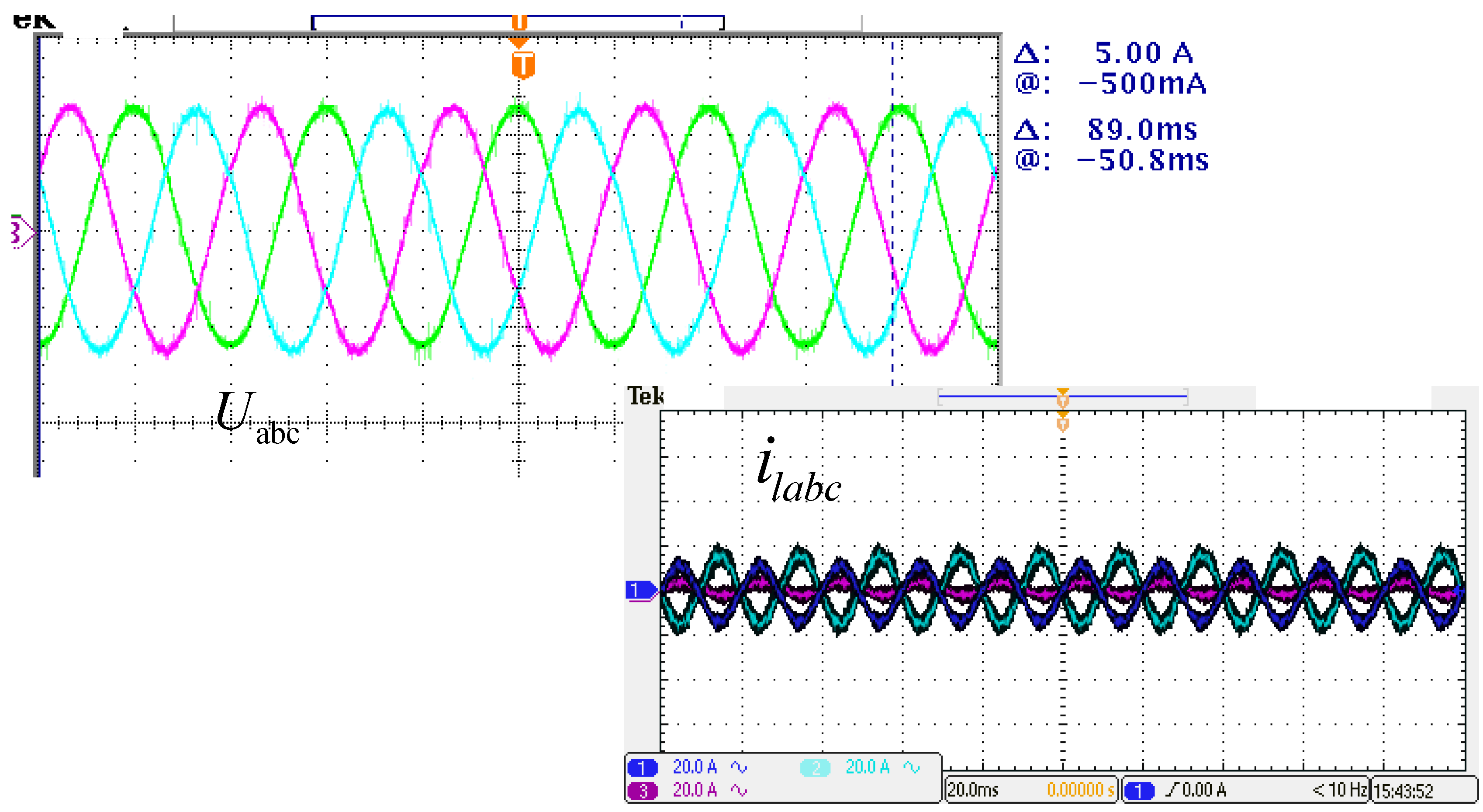
4.2. Experimental Test

5. Conclusions and Future Work
- (1)
- The proposed control strategy is conducted in a stationary αβ frame, which has a feature of extensibility and suitability and is convenient for the implementation of multiple PR regulators with different center frequencies. Furthermore, it is easy and simple to design parameters of controllers for the reason that control signals under α-β coordinates need do not have to be decoupled.
- (2)
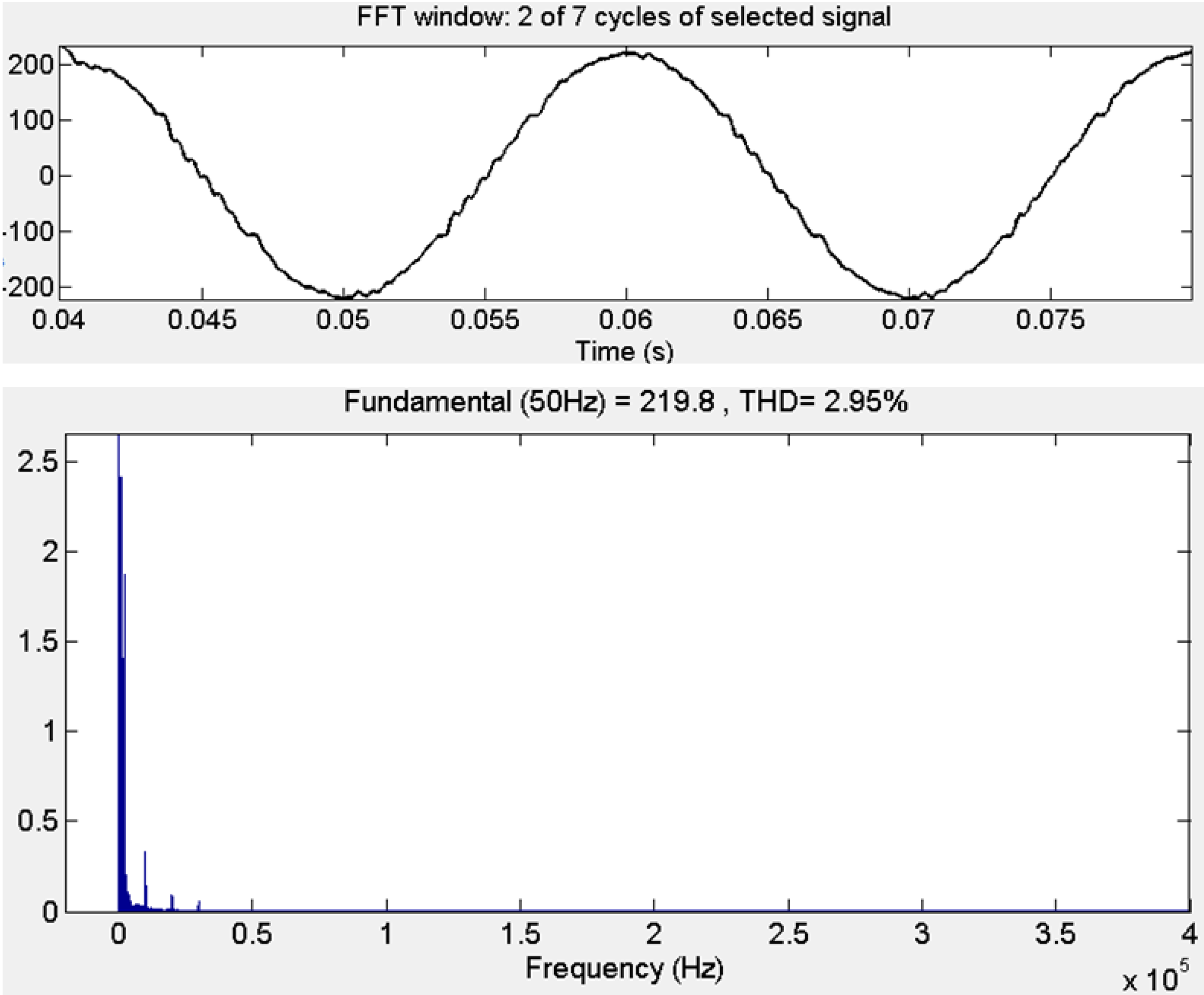
- The proposed control strategy applies load current as feedforward of dual-loop control, which makes a great contribution to its outstanding performance in voltage control such as zero steady-state error and low THD. Furthermore, the proposed control strategy has excellent dynamics including quick dynamic response and short regulation time, all of which ensure that the BESS has a strong ability to support unbalanced and nonlinear loads.
- (3)
- The proposed strategy can perfectly support renewable energy, which is beneficial for the spread and development of distributed generations.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mehrizi-Sani, A.; Iravani, R. Potential-function based control of a microgrid in islanded and grid-connected modes. IEEE Trans. Power Syst. 2010, 25, 1883–1891. [Google Scholar] [CrossRef]
- Tan, X.; Li, Q.; Wang, H. Advances and trends of energy storage technology in Microgrid. Int. J. Electr. Power Energy Syst. 2013, 44, 179–191. [Google Scholar] [CrossRef]
- Serban, I.; Marinescu, C. Control strategy of three-phase battery energy storage systems for frequency support in microgrids and with uninterrupted supply of local loads. IEEE Trans. Power Electron. 2014, 29, 5010–5020. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of power converters in AC microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Malesani, L. Current control techniques for three-phase voltage-source PWM converters: A survey. IEEE Trans. Ind. Electron. 1998, 45, 691–670. [Google Scholar] [CrossRef]
- Karimi, H.; Davison, E.J.; Iravani, R. Multivariable servomechanism controller for autonomous operation of a distributed generation unit: Design and performance evaluation. IEEE Trans. Power Syst. 2010, 25, 853–865. [Google Scholar] [CrossRef]
- Jauch, T.; Kara, A.; Rahmani, M.; Westermann, D. Power quality ensured by dynamic voltage correction. ABB Rev. 1998, 4, 25–36. [Google Scholar]
- Perera, A.A.D.R. Development of Controllers for the Dynamic Voltage Restorer. Master’s Thesis, Nanyang Technological University, Singapore, 2000. [Google Scholar]
- Vilathgamuwa, M.; Perera, A.A.D.R.; Choi, S.S. Performance improvement of the dynamic voltage restorer with closed-loop load voltage and current-mode control. IEEE Trans. Power Electron. 2002, 17, 824–834. [Google Scholar] [CrossRef]
- Loh, P.C.; Newman, M.J.; Zmood, D.N.; Holmes, D.G. A comparative analysis of multiloop voltage regulation strategies for single and three-phase UPS systems. IEEE Trans. Power Electron. 2003, 18, 1176–1185. [Google Scholar]
- Vilathgamuwa, D.M.; Wijekoon, H.M. Control and analysis of a new dynamic voltage restorer circuit topology for mitigating long duration voltage sags. In Proceedings of the 37th Industry Applications Conference (IAS), Pittsburgh, PA, USA, 13–18 October 2002; IEEE: New York, NY, USA, 2002; Volume 2, pp. 1105–1112. [Google Scholar]
- Makki, A.; Bose, S.; Giuliante, T.; Walsh, J. Using hall-effect sensors to add digital recording capability to electromechanical relays. In Proceedings of the 63rd Protective Relay Engineers, College Station, TX, USA, 29 March–1 April 2010; IEEE: New York, NY, USA, 2010; pp. 1–12. [Google Scholar]
- Pankau, J.; Leggate, D.; Schlegel, D.; Kerkman, R.; Skibiniski, G. High frequency modeling of current sensors. In Proceedings of the 14th Applied Power Electronics Conference and Exposition (APEC’99), Dallas, TX, USA, 1999; IEEE: New York, NY, USA, 1999; Volume 2, pp. 788–794. [Google Scholar]
- Hornik, T.; Zhong, Q.C. Control of grid-connected DC-AC converters in distributed generation: Experimental comparison of different schemes. In Proceedings of the Compatibility and Power Electronics (CPE’09), Badajoz, Spain, 5–22 May 2009; IEEE: New York, NY, USA, 2009; pp. 271–278. [Google Scholar]
- Yang, S.; Lei, Q.; Peng, F.Z.; Qian, Z. A robust control scheme for grid-connected voltage-source inverters. IEEE Trans. Ind. Electron. 2011, 58, 202–212. [Google Scholar] [CrossRef]
- Teodorescu, R.; Blaabjerg, F.; Liserre, M.; Loh, P.C. Proportional-resonant controllers and filters for grid-connected voltage-source converters. IEE Proc.-Electr. Power Appl. 2006, 153, 750–762. [Google Scholar] [CrossRef]
- Ahmed, K.H.; Massoud, A.M.; Finney, S.J.; Williams, B.W. A modified stationary reference frame-based predictive current control with zero steady-state error for LCL coupled inverter-based distributed generation systems. IEEE Trans. Ind. Electron. 2011, 58, 1359–1370. [Google Scholar] [CrossRef]
- Zeng, G.; Rasmussen, T.W. Design of current-controller with PR-regulator for LCL-filter based grid-connected converter. In Proceedings of the 2nd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Hefei, China, 16–18 June 2010; IEEE: New York, NY, USA, 2010; pp. 490–494. [Google Scholar]
- Shen, G.; Zhu, X.; Zhang, J.; Xu, D. A new feedback method for PR current control of LCL-filter-based grid-connected inverter. IEEE Trans. Ind. Electron. 2010, 57, 2033–2041. [Google Scholar] [CrossRef]
- Marconi, L.; Teel, A.R. Internal model principle for linear systems with periodic state jumps. IEEE Trans. Autom. Control 2013, 58, 2788–2802. [Google Scholar] [CrossRef]
- Wu, Y.; Shang, R.; Guo, X.; Li, Y.; Yu, H. The comparative analysis of PI controller with PR controller for the single-phase 4-quadrant rectifier. In Proceedings of the IEEE Transportation Electrification Conference and Expo Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; IEEE: New York, NY, USA, 2014; pp. 1–5. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dou, X.; Yang, K.; Quan, X.; Hu, Q.; Wu, Z.; Zhao, B.; Li, P.; Zhang, S.; Jiao, Y. An Optimal PR Control Strategy with Load Current Observer for a Three-Phase Voltage Source Inverter. Energies 2015, 8, 7542-7562. https://doi.org/10.3390/en8087542
Dou X, Yang K, Quan X, Hu Q, Wu Z, Zhao B, Li P, Zhang S, Jiao Y. An Optimal PR Control Strategy with Load Current Observer for a Three-Phase Voltage Source Inverter. Energies. 2015; 8(8):7542-7562. https://doi.org/10.3390/en8087542
Chicago/Turabian StyleDou, Xiaobo, Kang Yang, Xiangjun Quan, Qinran Hu, Zaijun Wu, Bo Zhao, Peng Li, Shizhan Zhang, and Yang Jiao. 2015. "An Optimal PR Control Strategy with Load Current Observer for a Three-Phase Voltage Source Inverter" Energies 8, no. 8: 7542-7562. https://doi.org/10.3390/en8087542