3.2. The Grey Prediction Model of Wind Power and Load with Residual Modification
The prediction accuracy of wind power and load is directly associated with the feasibility and accuracy of a microgrid’s energy coordinative optimization model. Therefore, for the sake of higher model accuracy, the wind power and load are predicted by dint of the grey prediction model with residual modification. From the perspective of time scale, this type of prediction is applicable to the data within 24–72 h, thus falling into the short-term power prediction category [
21].
(1) The establishment of grey prediction model:
Let x(0)(k) be the historical data series and x(1)(k) be the accumulating generation operator (AGO) series;
Following equation can be established for
x(1):
The differential equation of
GM(1,1) can be expressed as follows:
is the predictive output of Equation (11), which can be obtained by least square method as follows:
In which:
Following equation can be obtained after Equation (11) is put into the differential equation:
(2) The building of residual model
If the
GM(1,1) model built with original sequence does not pass the test, residual modification shall be implemented with a view to heightening prediction accuracy. The residual sequence can be defined as follows:
The generating sequence
can be obtained through the AGO of residual sequence
. Then, corresponding
GM(1,1) model can be built by means of
When
sequence is added to original prediction sequence
the modified model will take shape:
where the correction coefficient is:
Finally, the prediction model of original sequence will be proposed for residual modification:
The residual test will be repeated until the prediction sequence passes the test upon being modified.
(3) Residual Test
It is indispensable to test the model after it is built. The variance and standard deviation (S1) of residual sequence as well as the variance and standard deviations (S2) of the original accumulated sequence are figured out.
Then, the judgment standards over the model’s residual test include:
when
P is greater than 0.8 and
C is smaller than 0.5, the prediction value is qualified. The specific prediction precision can be seen in
Table 3.
Table 3.
Grades of prediction precision.
Table 3.
Grades of prediction precision.
| Grade of Prediction Precision | P | C |
|---|
| Good | >0.95 | <0.35 |
| Qualified | >0.8 | <0.5 |
| Barely qualified | >0.7 | <0.45 |
| Unqualified | ≤0.7 | ≥0.65 |
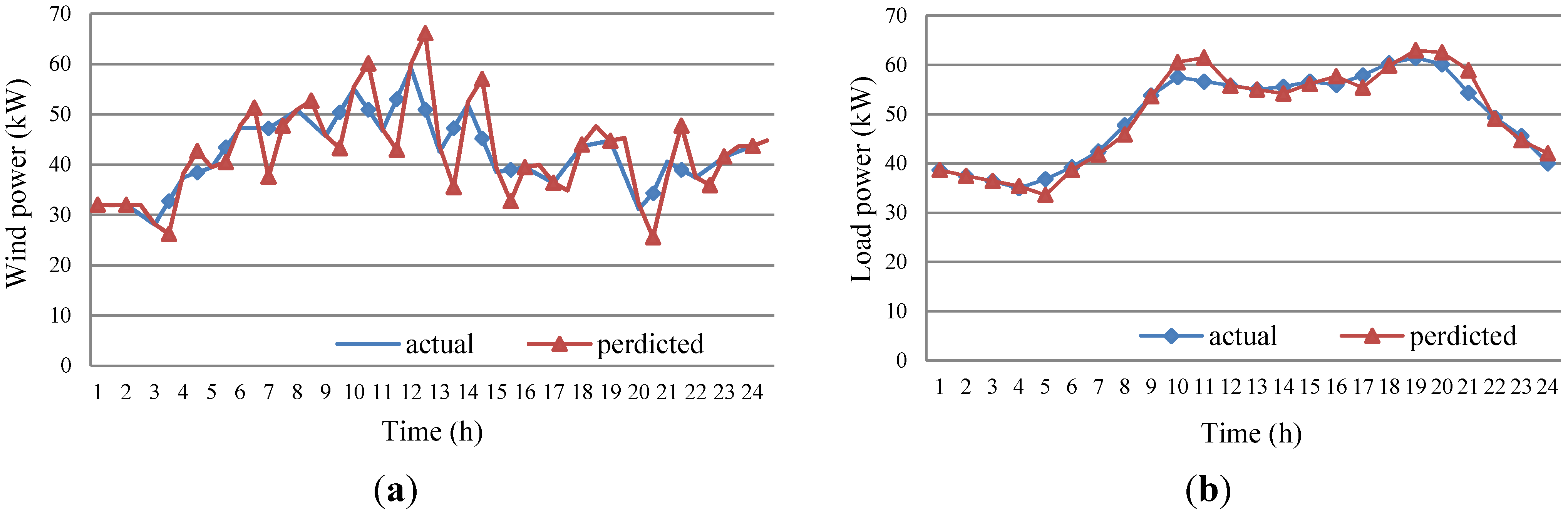
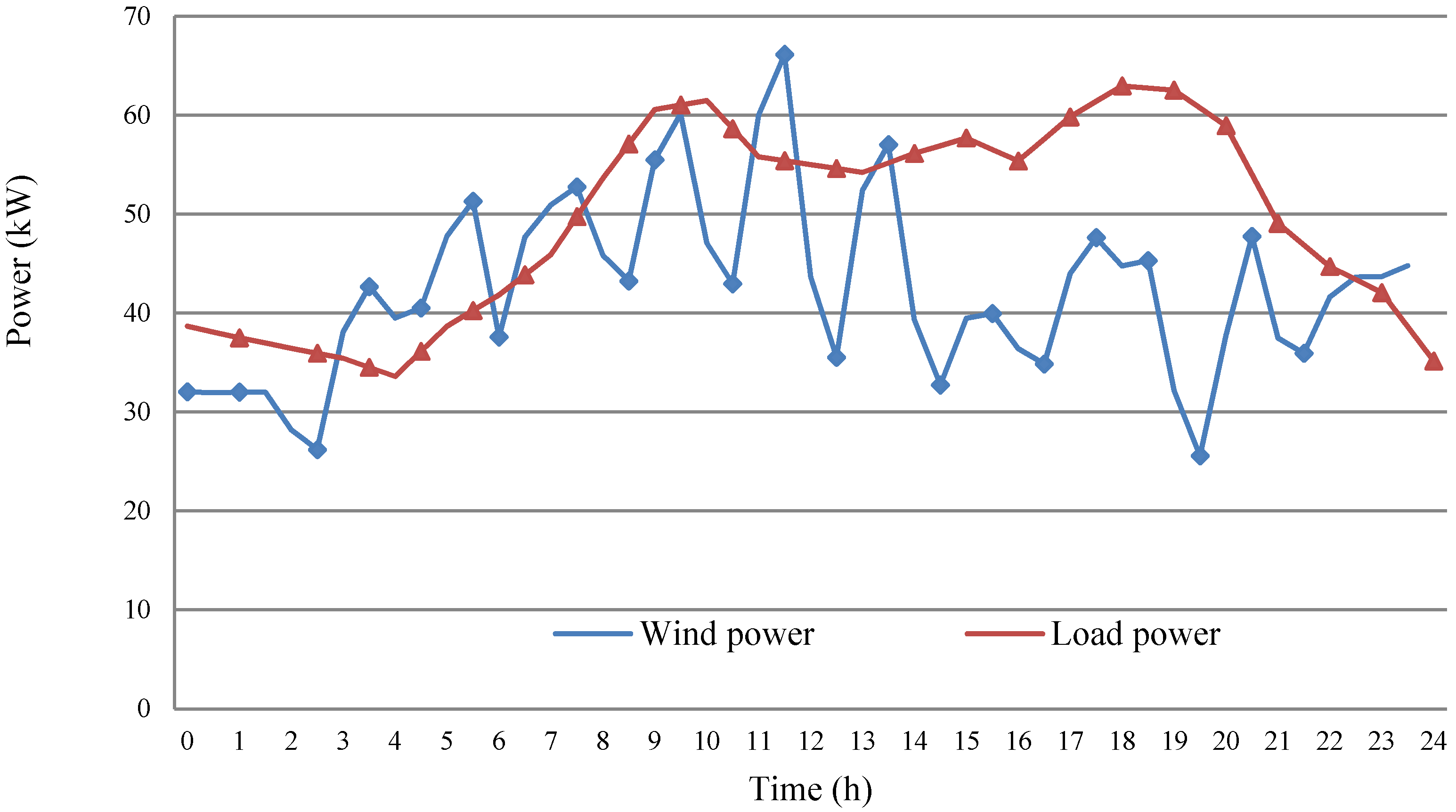
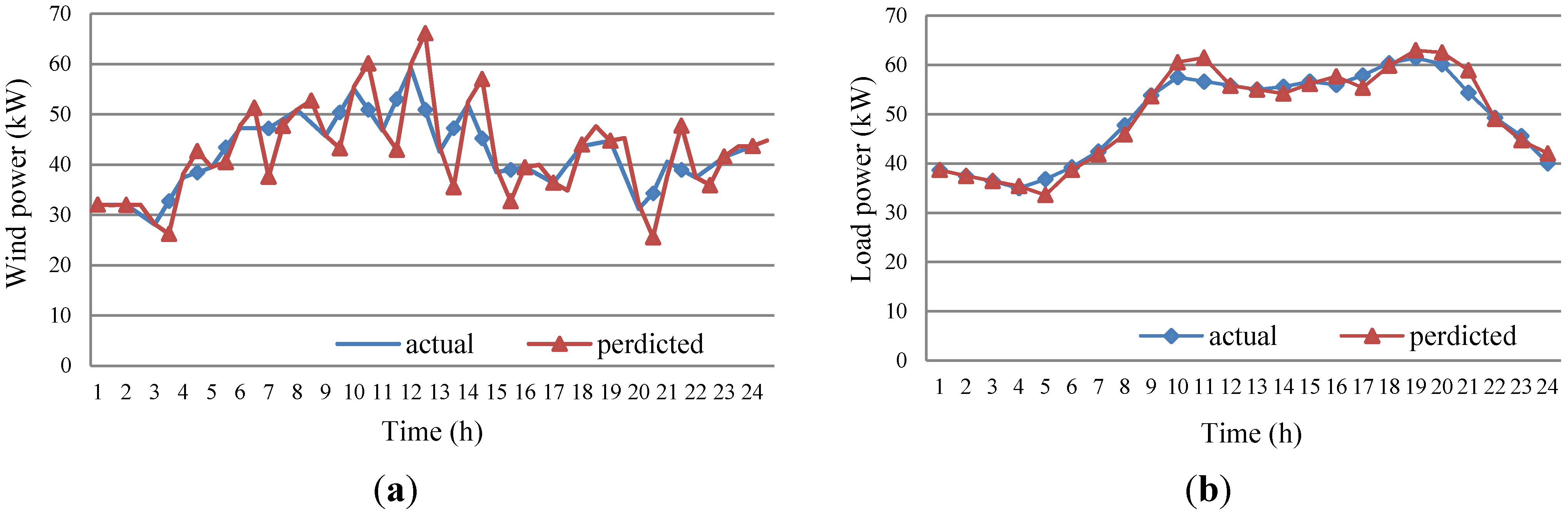
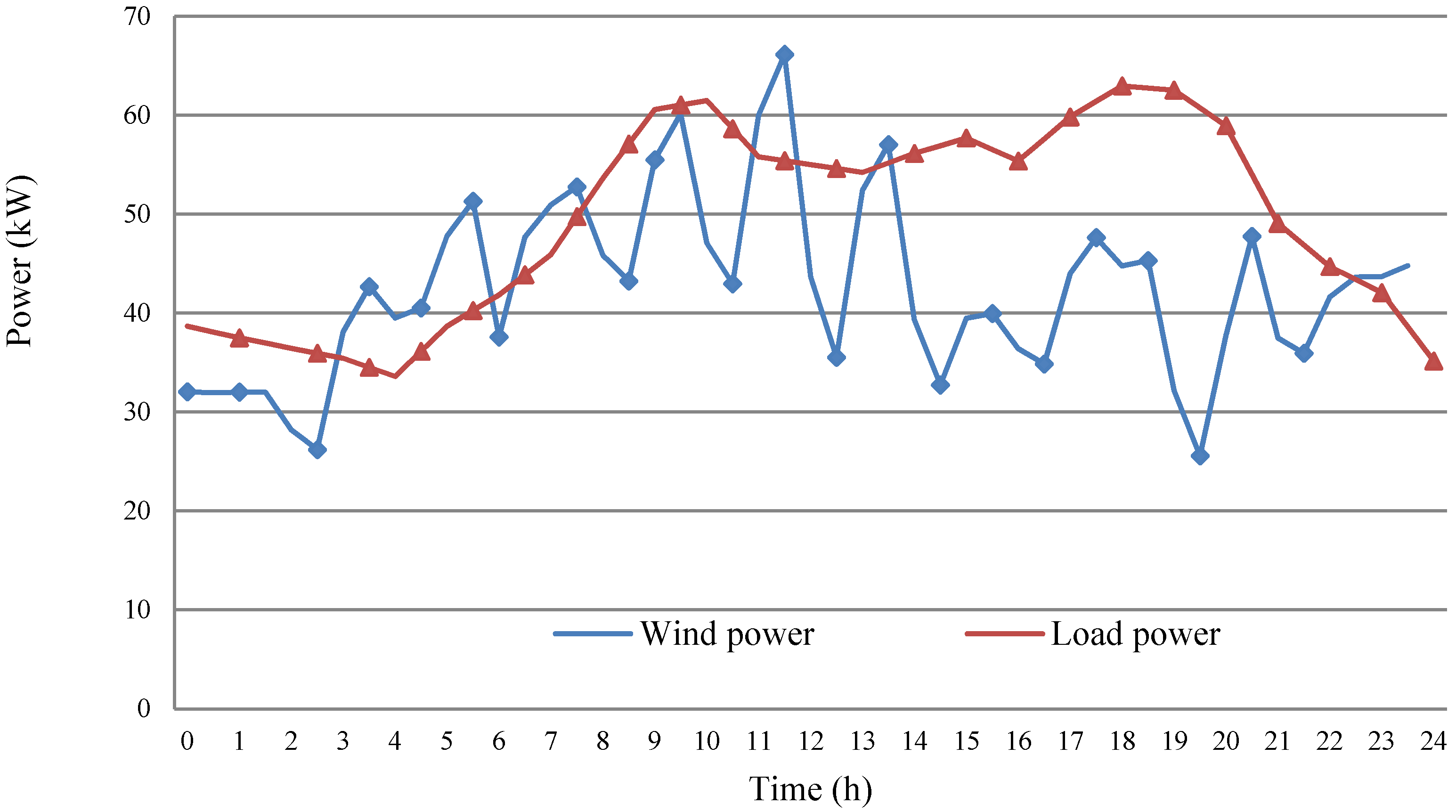
In combination with the known meteorological data, the above method can be adopted to figure out the predictive speed to finally deduce the wind power data, as shown in
Figure 6a. This method can be also employed to work out the load power by dint of previous statistical data, as shown in
Figure 6b. In the figure, blue represents the actual power, and red refers to the predictive power.
Figure 6 describes the predictive and actual value of wind and load power within 24 h. Upon calculation, the variation ratio and small error probability of the predictive wind power value are
C = 0.4035, and
P = 0.8085, respectively, and those of the predictive load power value are
C = 0.2190 and
P = 1, respectively. The two predictive evaluation indexes are consistent with requirements, which proves that the grey prediction method with residual modification can produce a satisfactory short-term prediction effect.
Figure 6.
The predictive and actual wind and load power: (a) The predictive wind power curve within 24 h; (b) The predictive load power curve within 24 h.
Figure 6.
The predictive and actual wind and load power: (a) The predictive wind power curve within 24 h; (b) The predictive load power curve within 24 h.
3.3. Energy Coordinative Optimization Management Model of Microgrid System
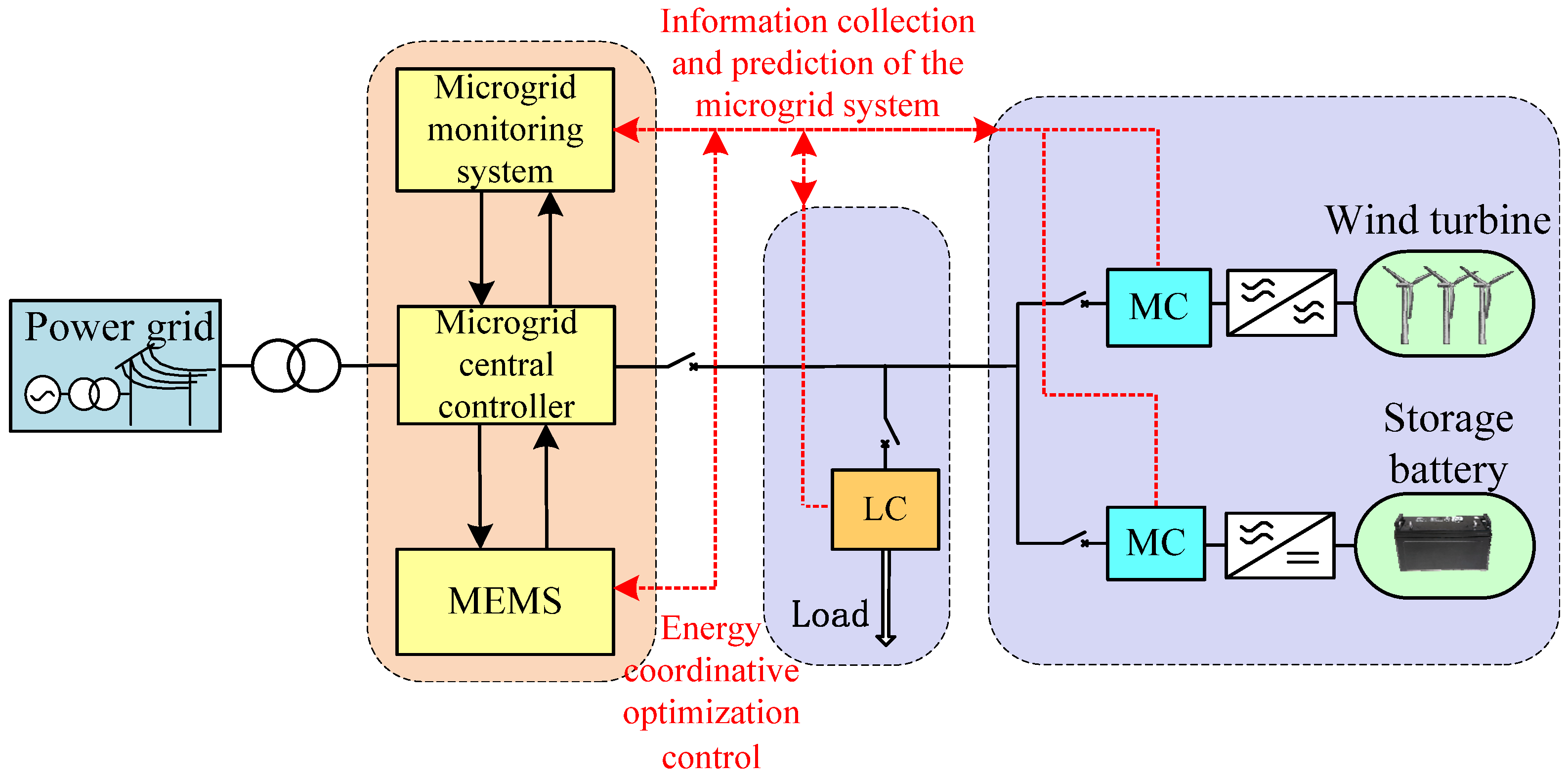
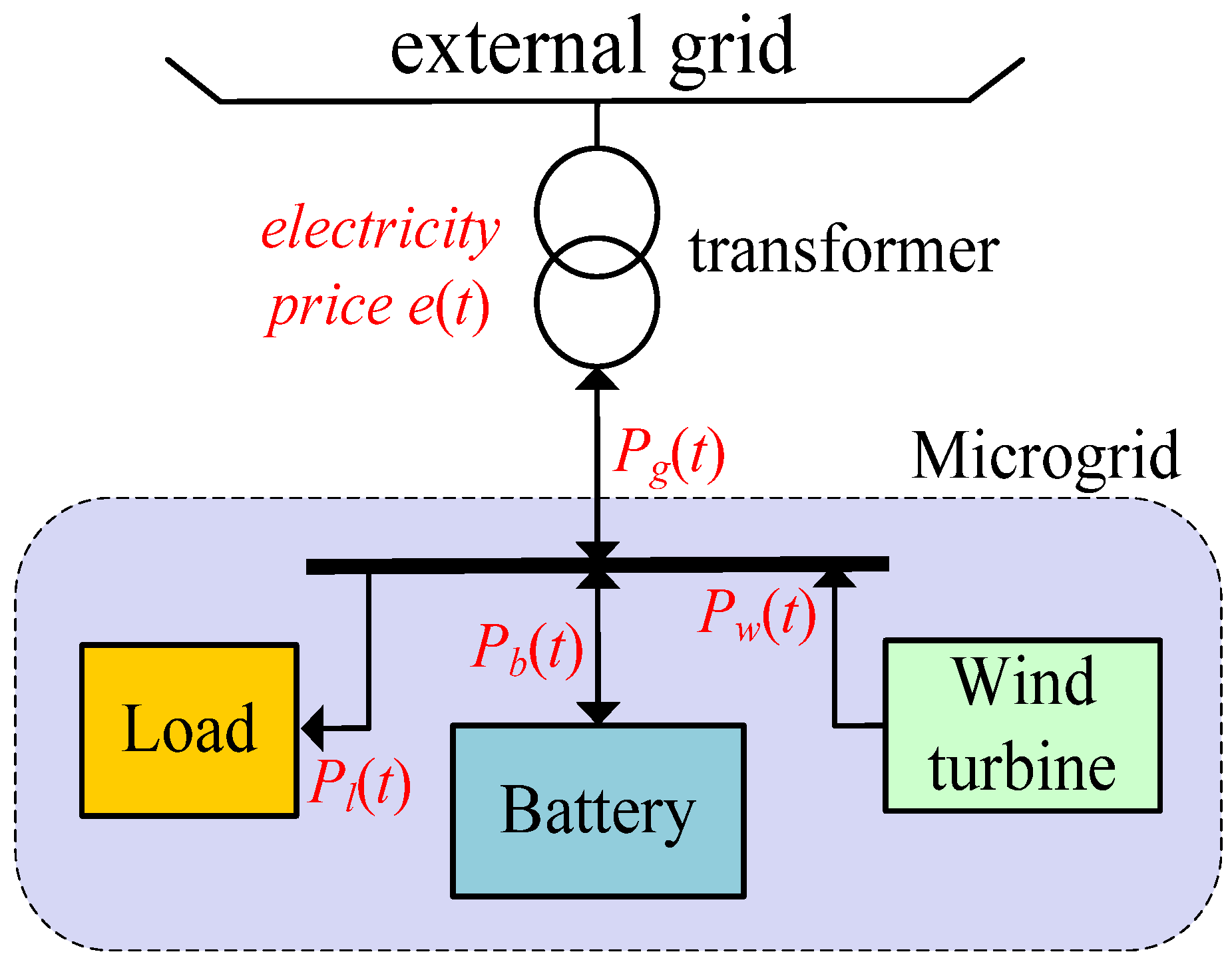
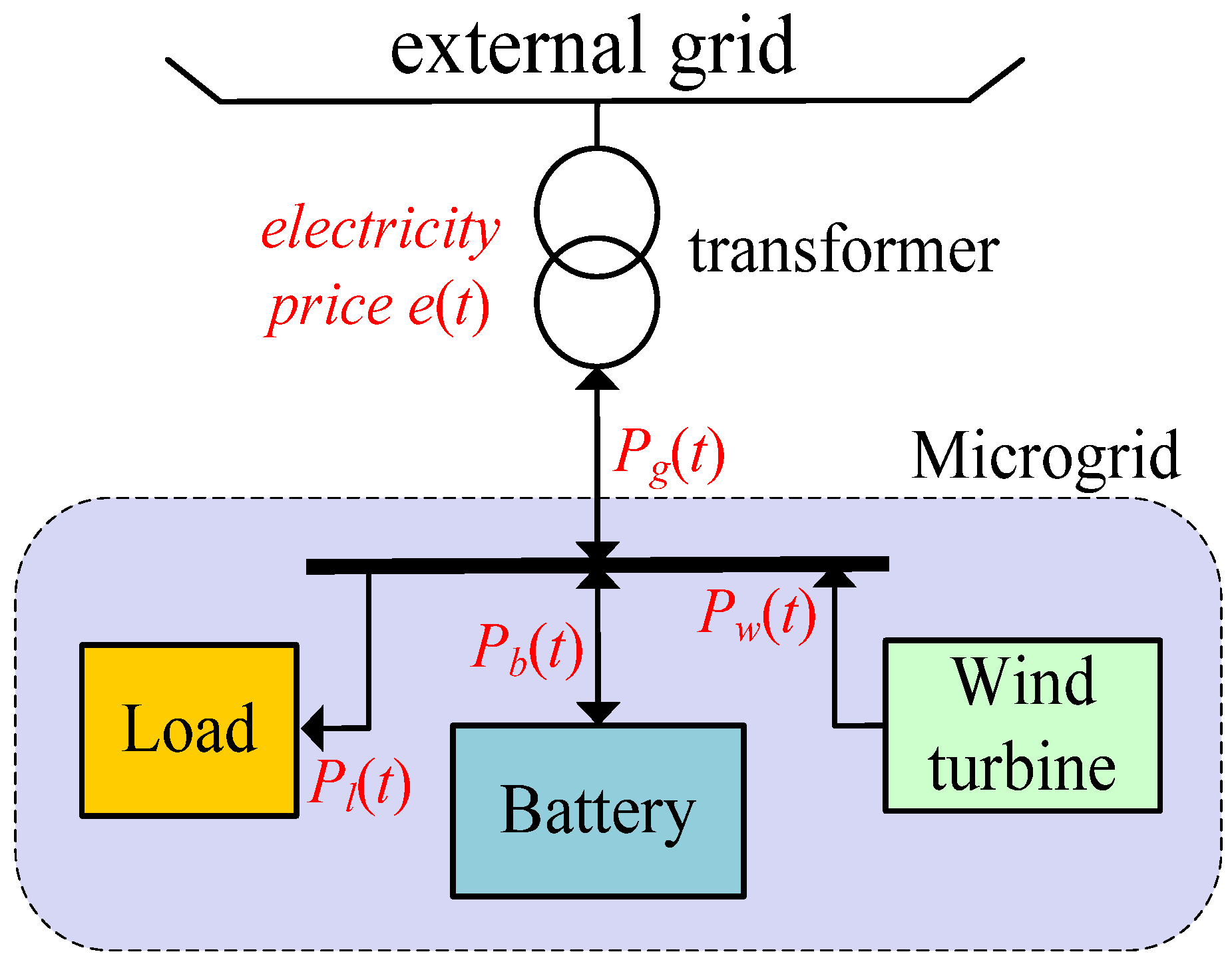
A microgrid energy coordinative optimization management system is supposed to plan and arrange the energy of wind turbines and storage batteries by dint of a reasonable and effective energy management strategy according to the short-term predictive power curve of wind and load a few days ago. In a given period, comprehensive consideration should be given to the predictive generating capacity of wind turbines, the remaining capacity of storage batteries, the power grid’s spot power price and load demand to build a model in which the objective function is to minimize the power consumption from the external grid and the constraints are constituted by the microgrid energy balance and the rated power of DGs. In this way, the capacity of power exchange between the microgrid and the external grid in each stage can be optimized to supply the electric energy accurately for the load at the lowest cost in real time.
3.3.1. Objective Function
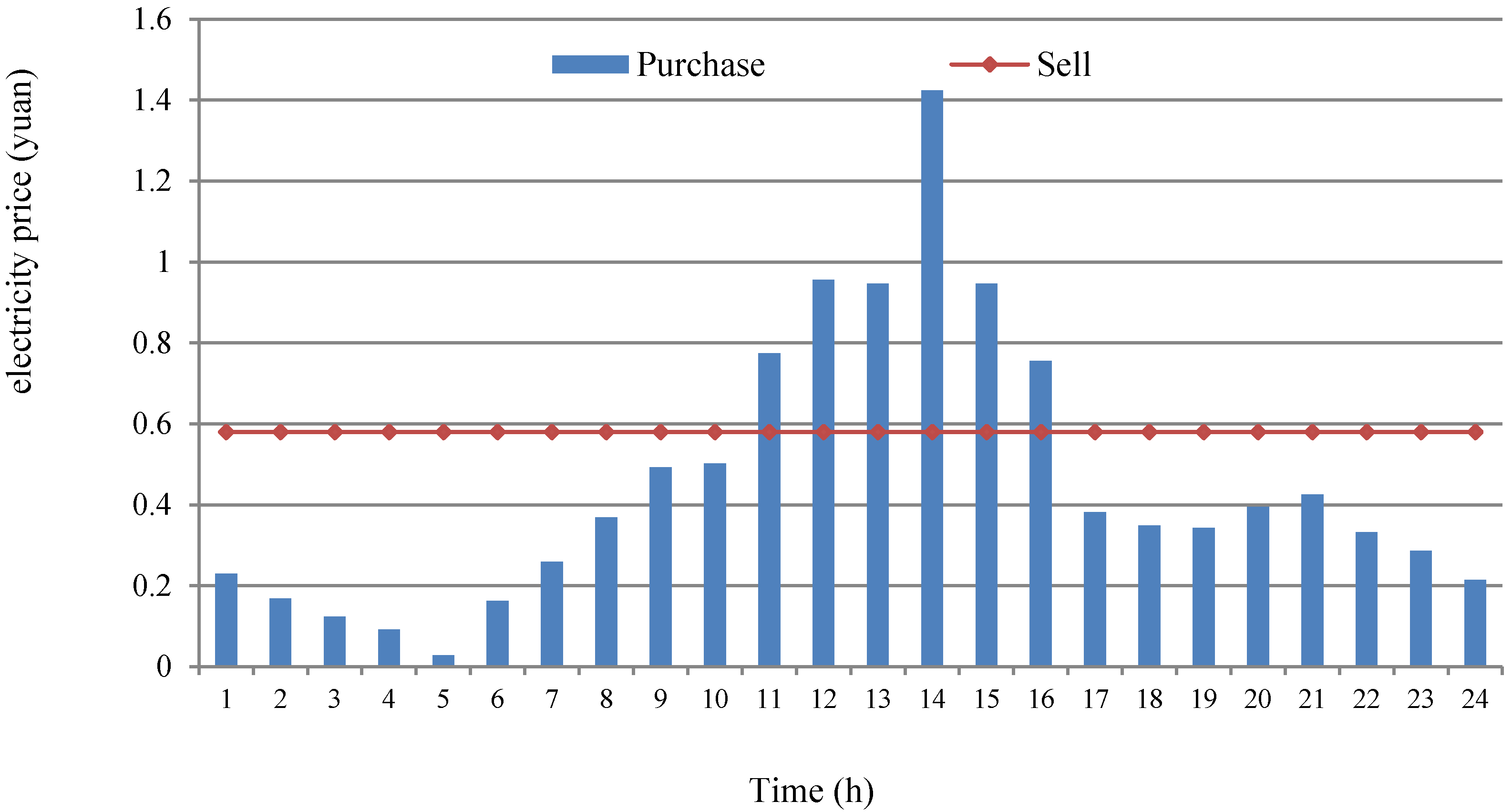
Based on the guarantee of local load and power supply, the goal should be to minimize the consumption expenses from the external grid during the operation of the microgrid, which include the cost of the electricity purchased from the power grid, the earnings from selling electricity to the external grid, and the maintenance costs and depreciation losses of storage batteries:
In the equation, eSell(t) refers to the spot power price when the electricity is sold to the external grid; eBuy(t) to the spot power price at which the electricity is bought from the external grid; ebat(t) to the management cost of storage batteries; PgBuy(t) to the electric power absorbed by the external grid (negative sign) at time t; PgSell(t) to the electric power generated by the external grid (positive sign) at time t; Pbat(t) to the active power of the storage batteries at time t; and Δt to the time interval of system operation (Δt = 1 h).
3.3.2. Constraints
(1) Power balance constraint:
In the equation, Pw(t) refers to the power output of a wind turbine unit at the time t and Pl(t) to the power consumption at the time t. When positive values, Pg(t) and Pb(t) will represent the power output of external grid and storage battery at the time t, respectively; conversely, they will represent the power input.
(2) The constraints on the maximum power of the interaction between microgrid and external grid:
In the equation, Pgmin and Pgmax constitute the lower and upper limits of the power during the energy exchange between the microgrid system and the external grid.
(3) Constraints on the power output of storage batteries:
In the equation, Pbmin and Pbmax represent the minimum and maximum output power of the storage batteries, respectively.
(4) Energy balance constraints of the storage batteries:
where
E(
t) refers to the remaining capacity of a storage battery at time
t and
τ to the hourly self-discharge decay of a storage battery within a unit time (normally, τ = 10
−4).
(5) Constraints on the charge and discharge rate of storage batteries:
where △
Emin(
t) and △
Emax(
t) denote the minimum and maximum values of the charge and discharge rates.
(6) Constraints on the remaining capacity of the storage batteries
where
Emin(
t) and
Emax(
t) refer to the minimum and maximum values of storage battery capacity, respectively.
3.5. Linearization of the Non-Linear Model in Energy Coordinative Optimization of Microgrid System
Mixed Integer Linear Programming (MILP) intends to optimize problems involving integer or discrete variables, and is widely applied due to its rapid computing speed and high accuracy. Considering that most of the problems that the actual system are constituted by non-linear problems and they are usually required to be converted into a linear expression if the MILP method is adopted, the key to finding a solution successfully is to linearize the non-linear problems effectively.
In the energy coordinative optimization management model, because the prices of selling and purchasing power are brought in, the energy exchange between external grid and microgrid has two input and output states. For this reason, a state variable α is introduced to represent the state of the energy flow between the external grid and microgrid. α = 0 indicates that the electricity is sold, and α = 1 indicates that the electricity is purchased, as expressed by Equation (31):
The new constraints are added as follows:
As a proper margin, N is used to calculate in MILP. On this basis, the non-linear factors in the model can be transformed into a linear equation by the state variable α, and meanwhile, the optimization problem can be converted from a non-linear planning problem into a mixed integer linear planning problem, so MILP can be used to find a solution.
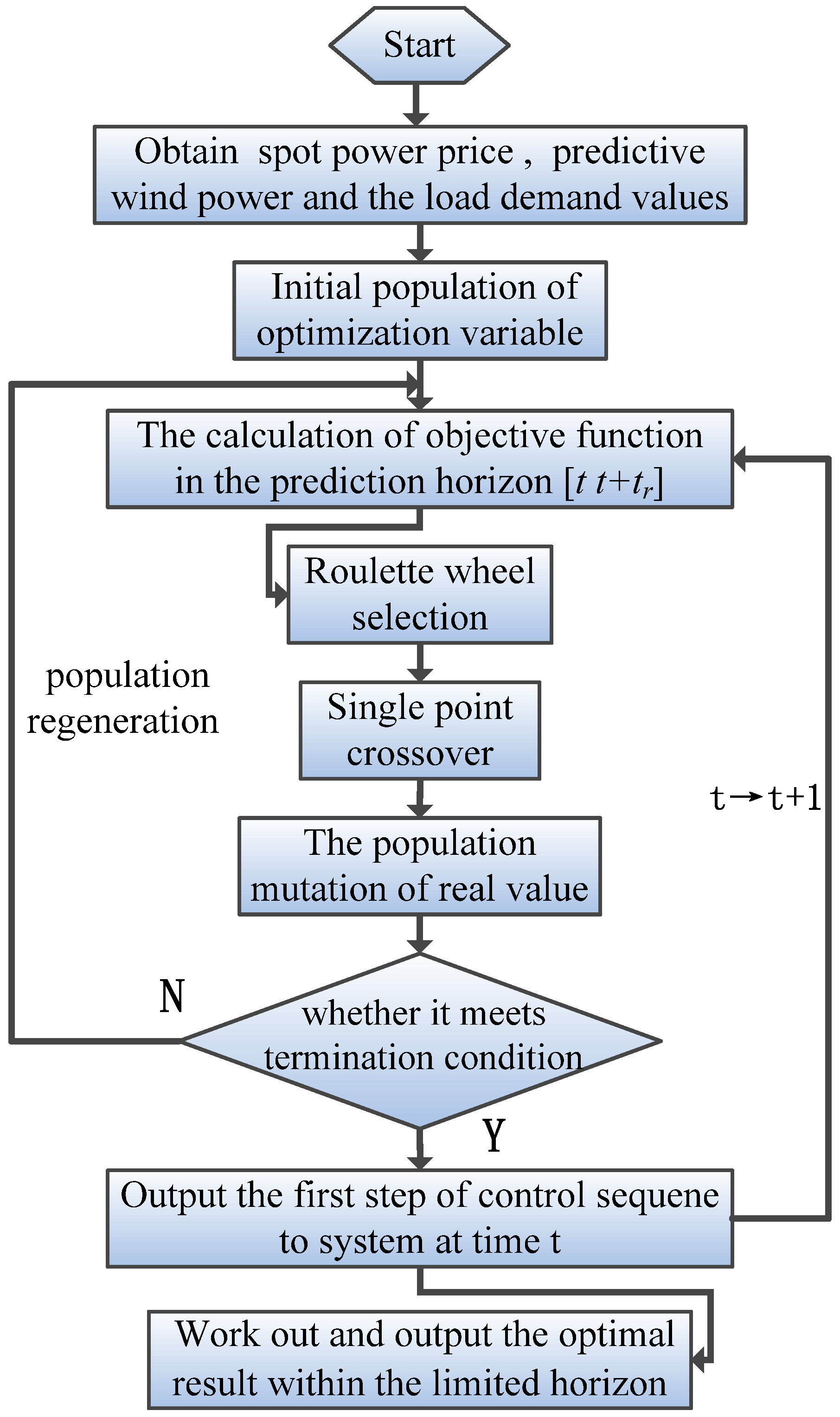
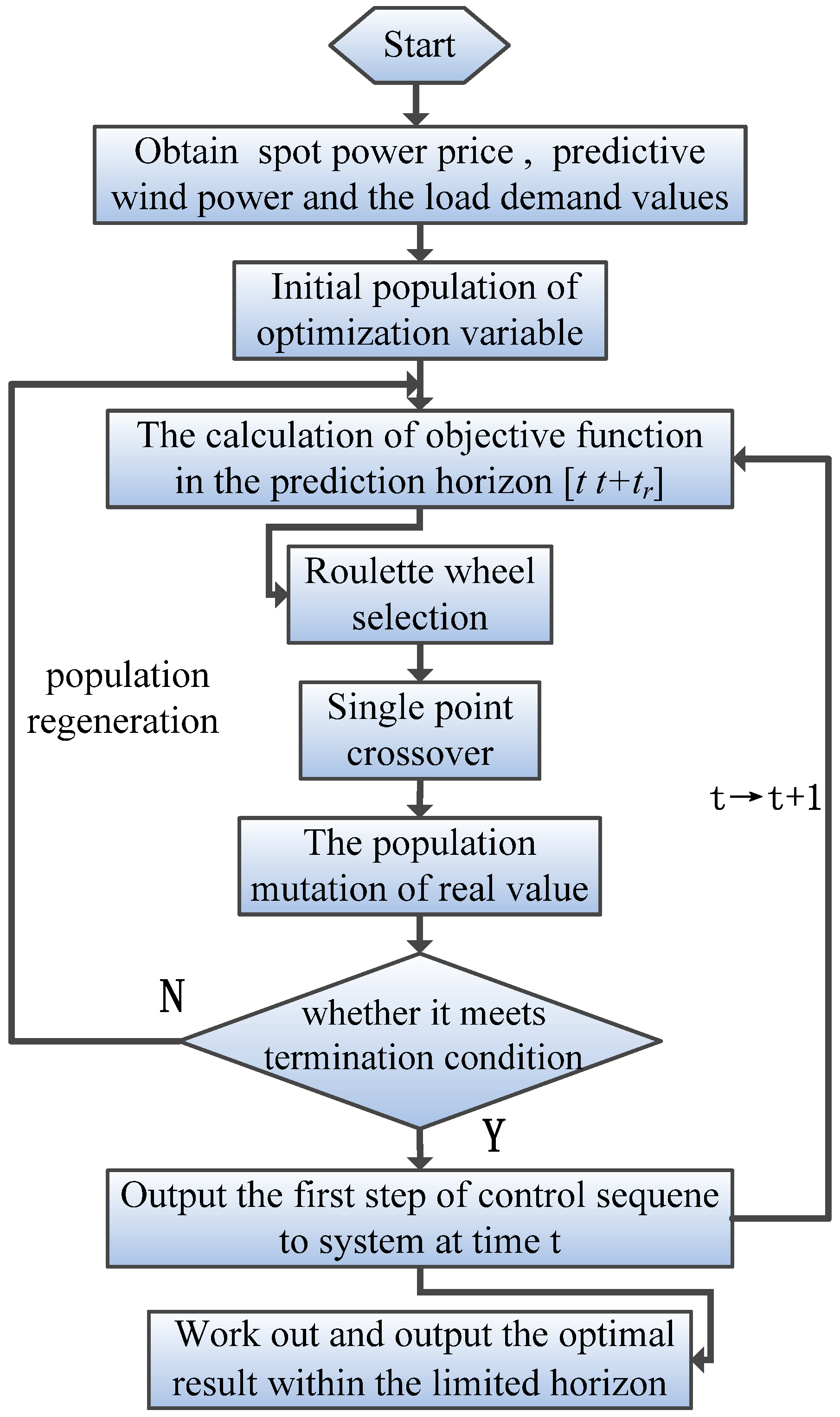
Figure 7.
The flowchart of RHC optimization strategy based on GA.
Figure 7.
The flowchart of RHC optimization strategy based on GA.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}