
Real-Time Estimation of Power System Frequency Using a Three-Level Discrete Fourier Transform Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
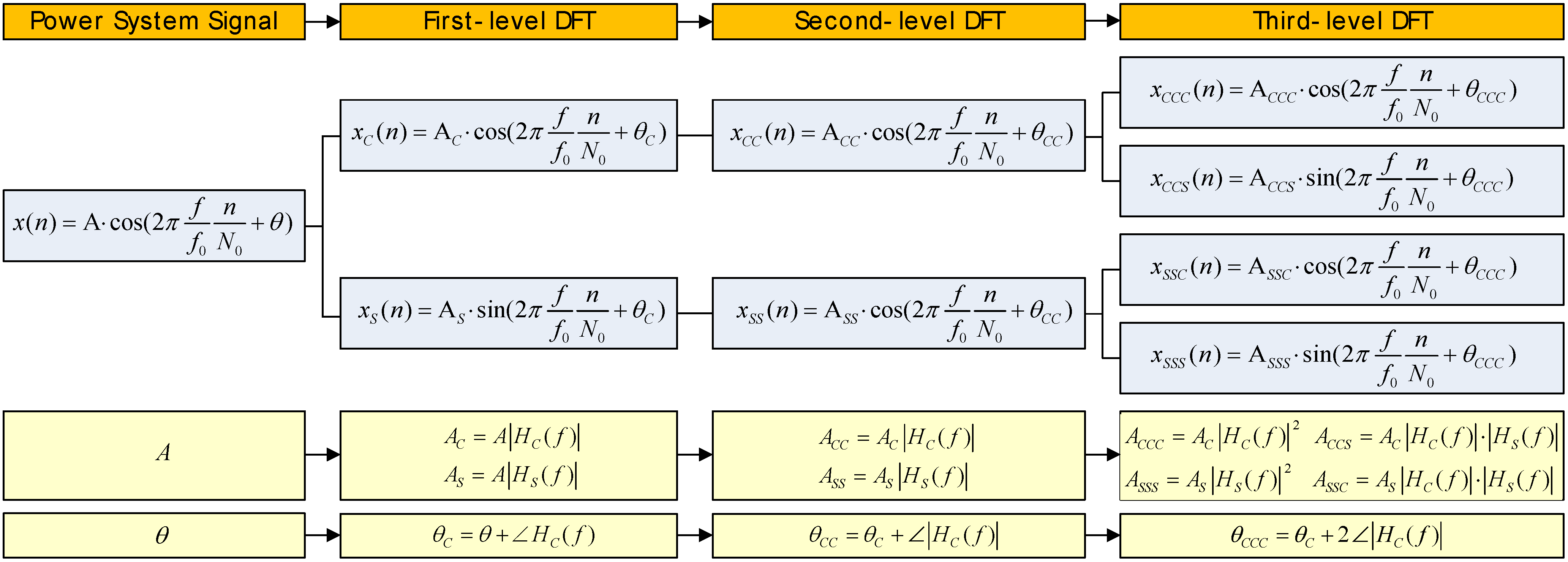
2. Frequency Estimation
3. Performance Evaluation
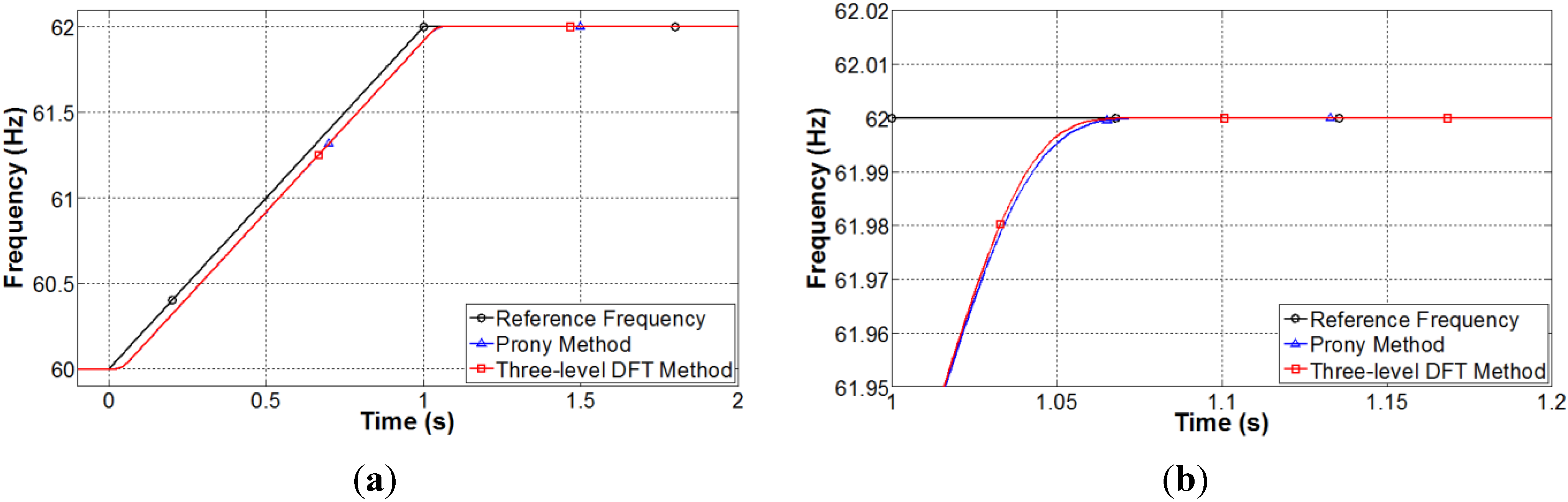
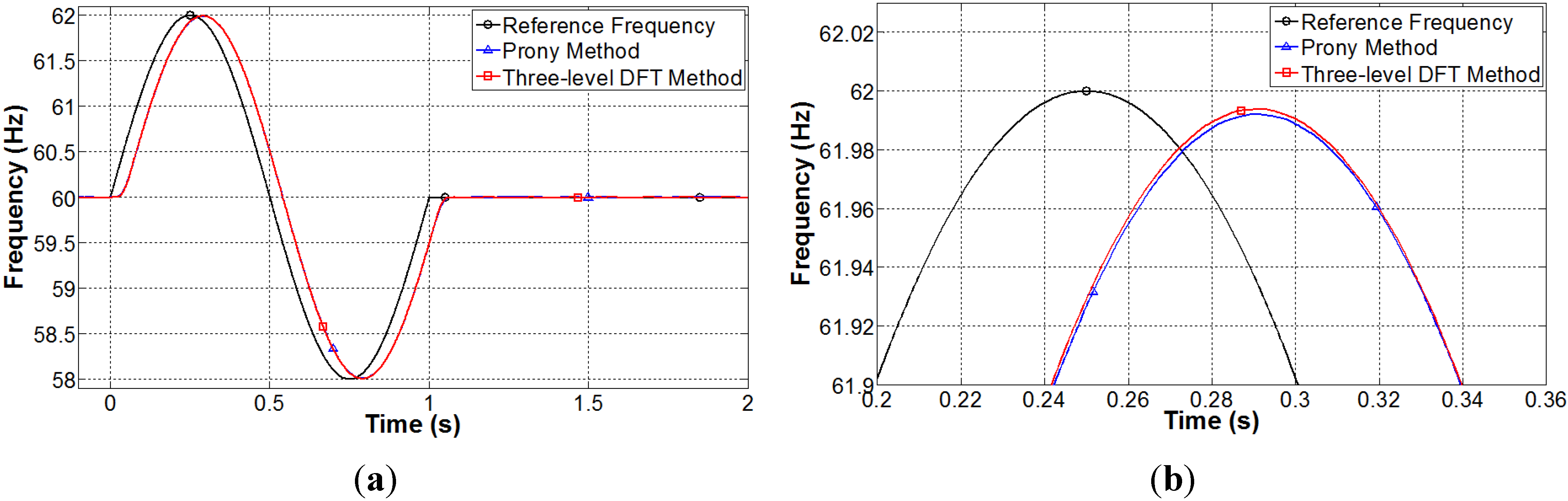
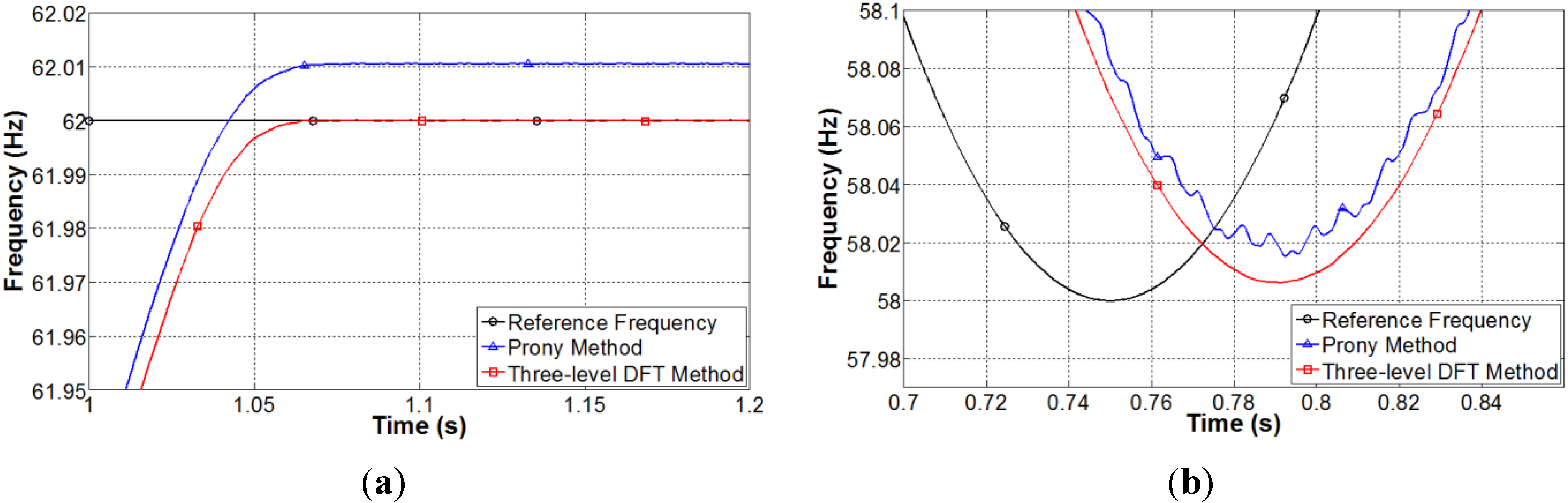
3.1. Computer Simulations

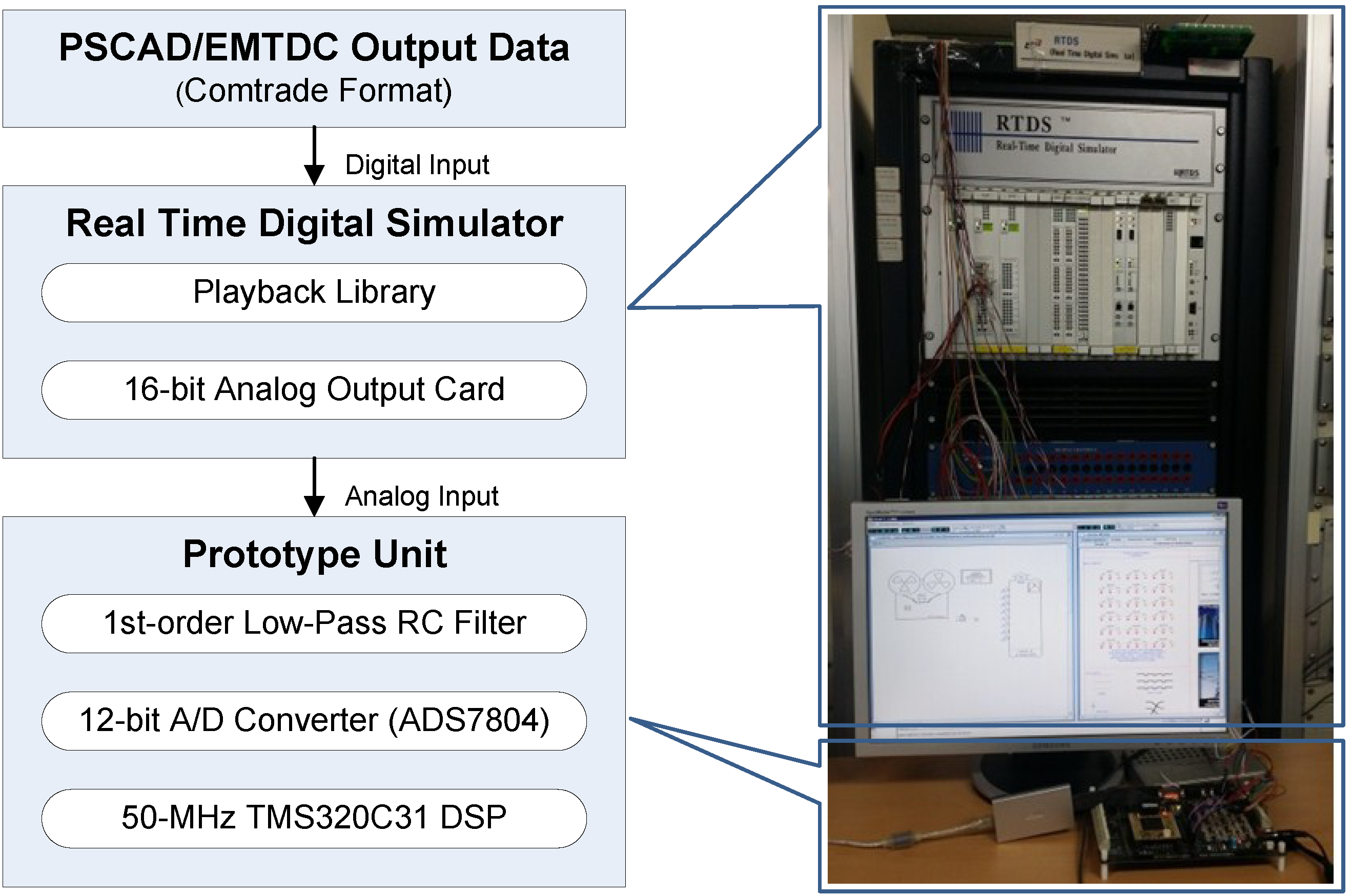
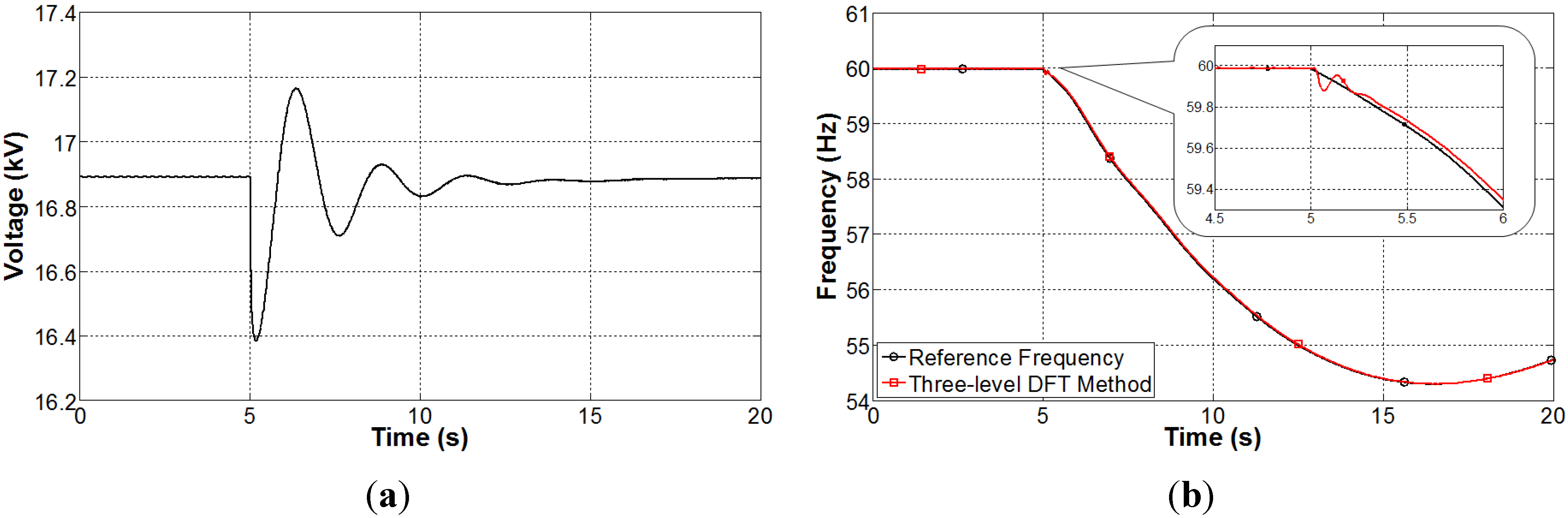
3.2. Hardware Implementation



4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Lobos, T.; Rezmer, J. Real-time determination of power system frequency. IEEE Trans. Instrum. Meas. 1997, 46, 877–881. [Google Scholar] [CrossRef]
- Rahmann, C.; Castillo, A. Fast frequency response capability of photovoltaic power plants: The necessity of new grid requirements and definitions. Energies 2014, 7, 6306–6322. [Google Scholar] [CrossRef]
- Margaris, I.D.; Hansen, A.D.; Sørensen, P.; Hatziargyriou, N.D. Illustration of modern wind turbine ancillary services. Energies 2010, 3, 1290–1302. [Google Scholar] [CrossRef]
- Thomas, D.W.P.; Woolfson, M.S. Evaluation of frequency tracking methods. IEEE Trans. Power Deliv. 2001, 16, 367–371. [Google Scholar] [CrossRef]
- Denis, P.; Counan, C.; Hossenlopp, L.; Holweck, C. Measurement of voltage phase for the French future defence plan against losses of synchronism. IEEE Trans. Power Deliv. 1992, 7, 62–69. [Google Scholar] [CrossRef]
- Begovic, M.M.; Djuric, P.M.; Dunlap, S.; Phadke, A.G. Frequency tracking in power network in the presence of harmonics. IEEE Trans. Power Deliv. 1993, 8, 480–486. [Google Scholar] [CrossRef]
- Akke, M. Frequency estimation by demodulation of two complex signals. IEEE Trans. Power Deliv. 1997, 12, 157–163. [Google Scholar] [CrossRef]
- Moore, P.J.; Carranza, R.D.; Johns, A.T. A new numeric technique for high-speed evaluation of power system frequency. IEE Proc.-Gener. Transm. Distrib. 1994, 141, 529–536. [Google Scholar] [CrossRef]
- Sidhu, T.S. Accurate measurement of power system frequency using a digital signal processing technique. IEEE Trans. Instrum. Meas. 1999, 48, 75–81. [Google Scholar] [CrossRef]
- Nam, S.R.; Lee, D.G.; Kang, S.H.; Ahn, S.J.; Choi, J.H. Power system frequency estimation in power systems using complex prony analysis. Int. J. Electr. Eng. Technol. 2011, 6, 154–160. [Google Scholar] [CrossRef]
- Phadke, A.G.; Thorp, J.S.; Adamiak, M.G. A new measurement technique for tracking voltage phasors, local system frequency and rate of change of frequency. IEEE Trans. Power Appl. Syst. 1983, PAS-102, 1025–1038. [Google Scholar] [CrossRef]
- Yang, J.Z.; Liu, C.W. A precise calculation of power system frequency. IEEE Trans. Power Deliv. 2001, 16, 361–366. [Google Scholar] [CrossRef]
- Jinfeng, R.; Kezunovic, M. A hybrid method for power system frequency estimation. IEEE Trans. Power Deliv. 2012, 27, 1252–1259. [Google Scholar] [CrossRef]
- Djuric, M.B.; Djurisic, Z.R. Frequency measurement of distorted signals using Fourier and zero crossing techniques. Electr. Power Syst. Res. 2008, 78, 1407–1415. [Google Scholar] [CrossRef]
- Eckhardt, V.; Hippe, P.; Hosemann, G. Dynamic measuring of frequency and frequency oscillations in multiphase power systems. IEEE Trans. Power Deliv. 1989, 4, 95–102. [Google Scholar] [CrossRef]
- Kaura, V.; Blasko, V. Operation of a phase locked loop system under distorted utility conditions. IEEE Trans. Ind. Appl. 1997, 33, 58–63. [Google Scholar] [CrossRef]
- Karimi, H.; Karimi-Ghartemani, M.; Iravani, M.R. Estimation of frequency and its rate of change for application in power systems. IEEE Trans. Power Deliv. 2004, 19, 472–480. [Google Scholar] [CrossRef]
- Girgis, A.A.; Hwang, T.L. Optimal estimation of voltage and frequency deviation using linear and non-linear Kalman filtering: Theory and limitations. IEEE Trans. Power Appar. Syst. 1984, 103, 2943–2949. [Google Scholar] [CrossRef]
- Dash, P.K.; Pradhan, A.K.; Panda, G. Frequency estimation of distorted power system signals using extended complex Kalman filter. IEEE Trans. Power Deliv. 1999, 14, 761–766. [Google Scholar] [CrossRef]
- Routray, A.; Pradhan, A.K.; Rao, K.P. A novel Kalman filter for frequency estimation of distorted signals in power system. IEEE Trans. Instrum. Meas. 2002, 51, 469–479. [Google Scholar] [CrossRef]
- Zadeh, R.A.; Ghosh, A.; Ledwich, G. Combination of Kalman filter and least-error square techniques in power system. IEEE Trans. Power Deliv. 2010, 25, 2868–2880. [Google Scholar] [CrossRef]
- Kamwa, I.; Grondin, R. Fast adaptive schemes for tracking voltage phasor and local frequency in power transmission and distribution systems. IEEE Trans. Power Deliv. 1992, 7, 789–795. [Google Scholar] [CrossRef]
- Zivanovic, R. An adaptive differentiation filter for tracking instantaneous frequency in power system. IEEE Trans. Power Deliv. 2007, 22, 765–771. [Google Scholar] [CrossRef]
- Mojiri, M.; Karimi-Ghartemani, M.; Bakhshai, A. Estimation of power system frequency using an adaptive notch filter. IEEE Trans. Instrum. Meas. 2007, 56, 2470–2477. [Google Scholar] [CrossRef]
- Rawat, T.K.; Parthasarathy, H. A continuous-time least mean-phase adaptive filter for power system frequency estimation. Int. J. Electr. Power Energy Syst. 2009, 31, 111–115. [Google Scholar] [CrossRef]
- Xia, Y.; Mandic, D.P. A widely linear least mean phase algorithm for adaptive frequency estimation of unbalanced power systems. Int. J. Electr. Power Energy Syst. 2014, 54, 367–375. [Google Scholar] [CrossRef]
- Sachdev, M.S.; Giray, M.M. A least square technique for determining power system frequency. IEEE Trans. Power Appl. Syst. 1985, 437, 437–443. [Google Scholar] [CrossRef]
- Giray, M.M.; Sachdev, M.S. Off-nominal frequency measurements in electric power systems. IEEE Trans. Power Deliv. 1989, 4, 1573–1578. [Google Scholar] [CrossRef]
- Pradhan, A.K.; Routray, A.; Basak, A. Power system frequency estimation using least mean square technique. IEEE Trans. Power Deliv. 2005, 20, 1812–1816. [Google Scholar] [CrossRef]
- Chundamani, R.; Vasudevan, K.; Ramalingam, C.S. Real-time estimation of power system frequency using nonlinear least squares. IEEE Trans. Power Deliv. 2009, 24, 1021–1028. [Google Scholar] [CrossRef]
- Alkandari, A.M.; Soliman, S.A. Measurement of a power system nominal voltage, frequency and voltage flicker parameters. Int. J. Electr. Power Energy Syst. 2009, 31, 295–301. [Google Scholar] [CrossRef]
- Abdollahi, A.; Matinfar, F. Frequency estimation: A least-squares new approach. IEEE Trans. Power Deliv. 2011, 26, 790–798. [Google Scholar] [CrossRef]
- Dash, P.K.; Swain, D.P.; Routray, A.; Liew, A.C. An adaptive neural network approach for the estimation of power system frequency. Electr. Power Syst. Res. 1997, 41, 203–210. [Google Scholar] [CrossRef]
- Lai, L.L.; Chan, W.L.; Tse, C.T.; So, A.T.P. Real-time frequency and harmonic evaluation using artificial neural networks. IEEE Trans. Power Deliv. 1999, 14, 52–59. [Google Scholar] [CrossRef]
- Terzija, V.V.; Djuric, M.B.; Kovacevic, B.D. Voltage phasor and local system frequency estimation using Newton type algorithm. IEEE Trans. Power Deliv. 1994, 9, 1368–1374. [Google Scholar] [CrossRef]
- Zheng, J.; Lui, K.W.K.; Ma, W.K.; So, H.C. Two simplified recursive gauss–newton algorithms for direct amplitude and phase tracking of a real sinusoid. IEEE Signal Process. Lett. 2007, 14, 972–975. [Google Scholar] [CrossRef]
- Xue, S.Y.; Yang, S.X. Power system frequency estimation using Supervised Gauss-Newton algorithm. Measurement 2009, 42, 28–37. [Google Scholar] [CrossRef]
- Dash, P.K.; Krishnanand, K.R.; Patnaik, R.K. Dynamic phasor and frequency estimation of time-varing power system signals. Int. J. Electr. Power Energy Syst. 2013, 44, 971–980. [Google Scholar] [CrossRef]
- Lin, T.; Tsuji, M.; Yamada, E. A wavelet approach to real time estimation of power system frequency. In Proceedings of the 40th SICE Annual Conference, Nagoya, Japan, 25–27 July 2001; pp. 58–65.
- Ren, J.; Kezunovic, M. Use of recursive wavelet transform for estimating power system frequency and phasors. In Proceedings of the Transmission and Distribution Conference and Exposition, New Orleans, LA, USA, 19–22 April 2010; pp. 1–6.
- Jinfeng, R.; Kezunovic, M. Real-Time power system frequency and phasors estimation using recursive wavelet transform. IEEE Trans. Power Deliv. 2011, 26, 1392–1402. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam, S.-R.; Kang, S.-H.; Kang, S.-H. Real-Time Estimation of Power System Frequency Using a Three-Level Discrete Fourier Transform Method. Energies 2015, 8, 79-93. https://doi.org/10.3390/en8010079
Nam S-R, Kang S-H, Kang S-H. Real-Time Estimation of Power System Frequency Using a Three-Level Discrete Fourier Transform Method. Energies. 2015; 8(1):79-93. https://doi.org/10.3390/en8010079
Chicago/Turabian StyleNam, Soon-Ryul, Seung-Hwa Kang, and Sang-Hee Kang. 2015. "Real-Time Estimation of Power System Frequency Using a Three-Level Discrete Fourier Transform Method" Energies 8, no. 1: 79-93. https://doi.org/10.3390/en8010079
APA StyleNam, S.-R., Kang, S.-H., & Kang, S.-H. (2015). Real-Time Estimation of Power System Frequency Using a Three-Level Discrete Fourier Transform Method. Energies, 8(1), 79-93. https://doi.org/10.3390/en8010079