The experimental activity has been carried out on a light-duty engine that is used mainly in EU4 C-segment passenger car. It is a 3.0 l V6 diesel engine, equipped with a common-rail injection system, a high pressure cooled exhaust gas recirculation (EGR) circuit and a variable geometry turbine (VGT) turbocharger (TC) (
Table 1). While the EGR valve positioning has an intuitive convention, as EGR = 0% means fully closed and no gas recirculation, a clarification for the VGT position might be useful for the reader. In the given control system, a VGT position = 100% corresponds to a fully closed condition, and
vice versa the distributor is fully open with a VGT position = 0%. In other words, when the VGT is fully closed (100%) it means that the turbine, under steady state flow conditions, generates the highest backpressure correspondent to that mass flow rate, and therefore the pressure drop through the turbine is maximum. In this condition, the turbine produces its maximum power, increasing the TC speed, with the consequent increase of the intake manifold (IM) pressure.
2.1. The Concept
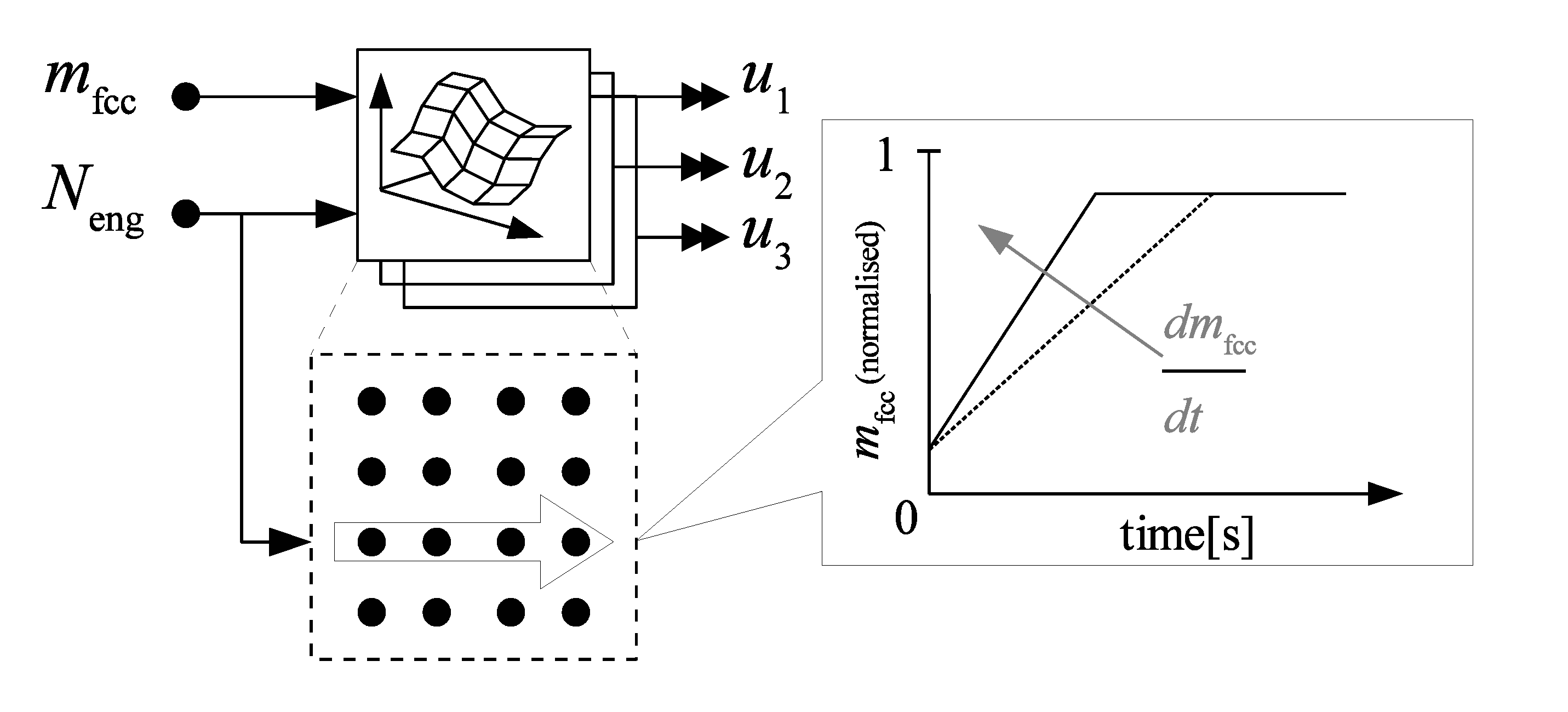
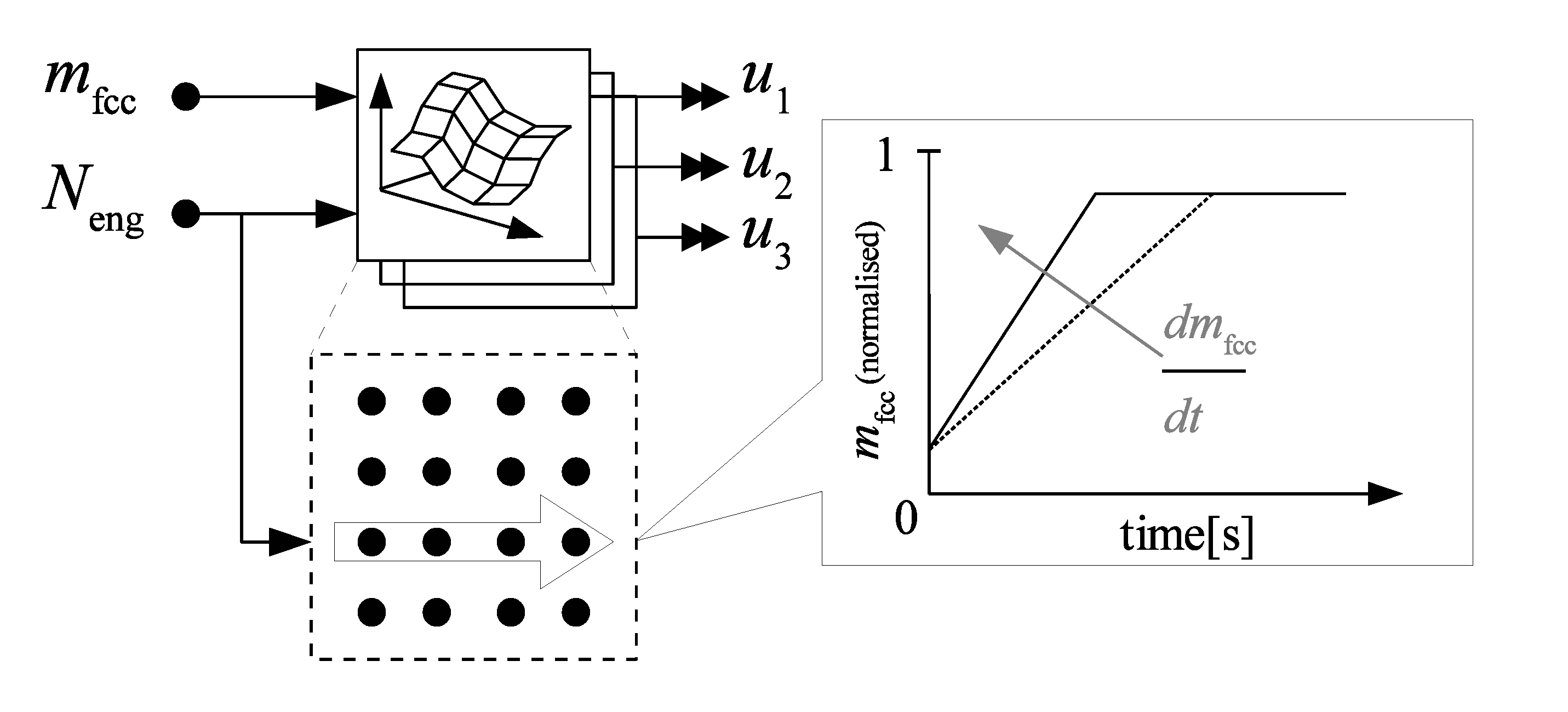
The top left corner of
Figure 1 shows a typical FF control structure based on steady-state control maps, spanned by engine speed (
Neng) and load (
mfcc). In a diesel engine, if neither torque limitation nor smoke limitation are active, the load request directly corresponds to a specific fuel quantity injected per cycle in each cylinder (
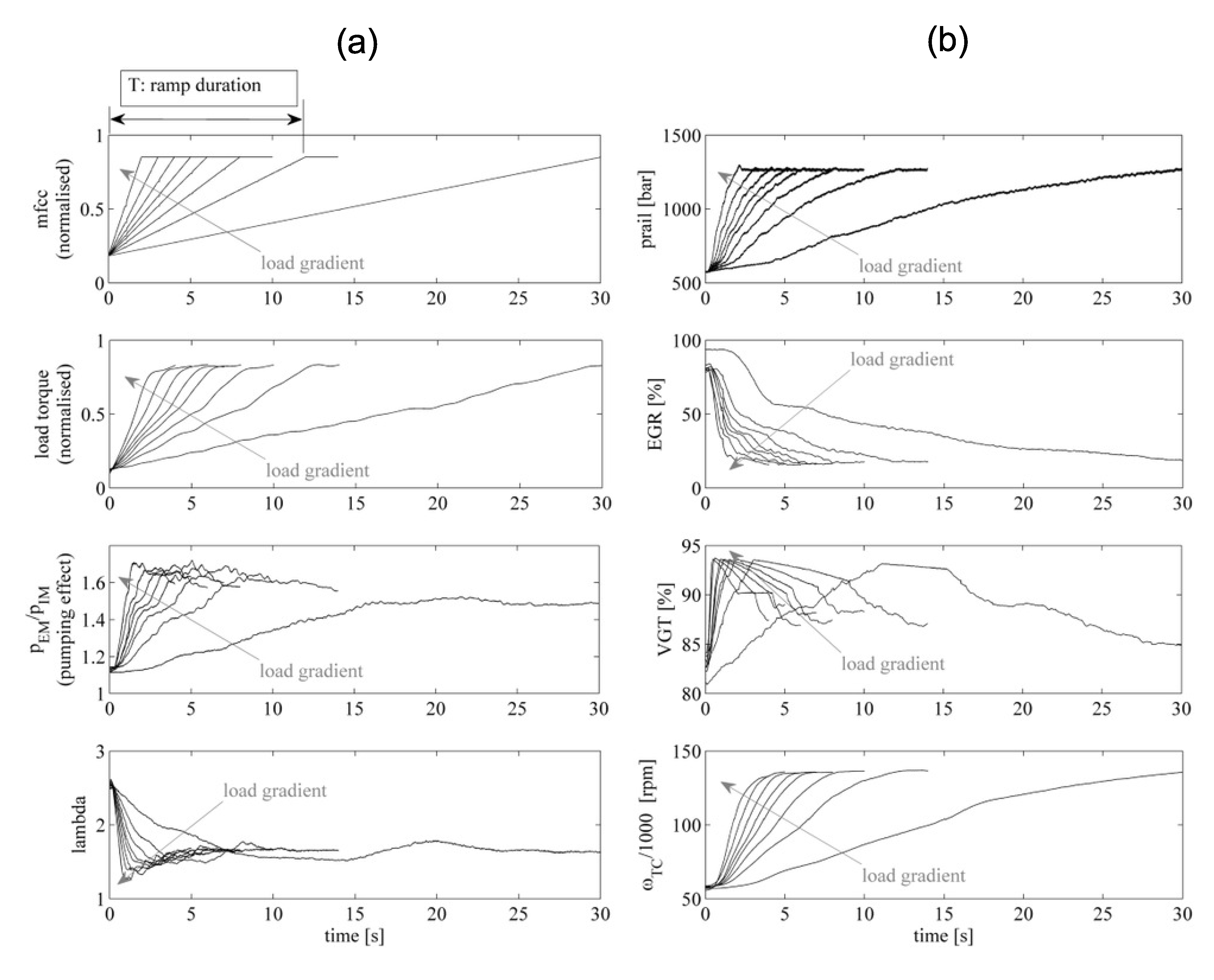
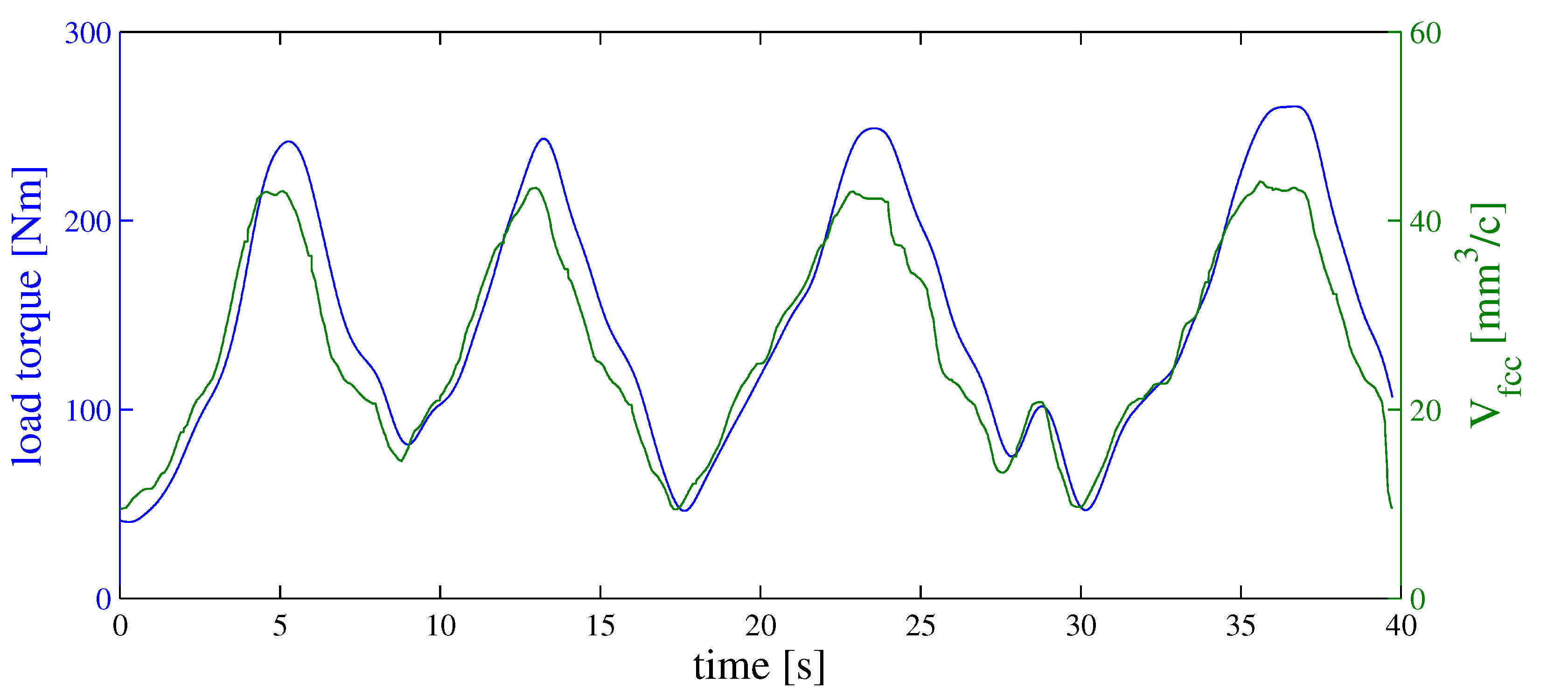
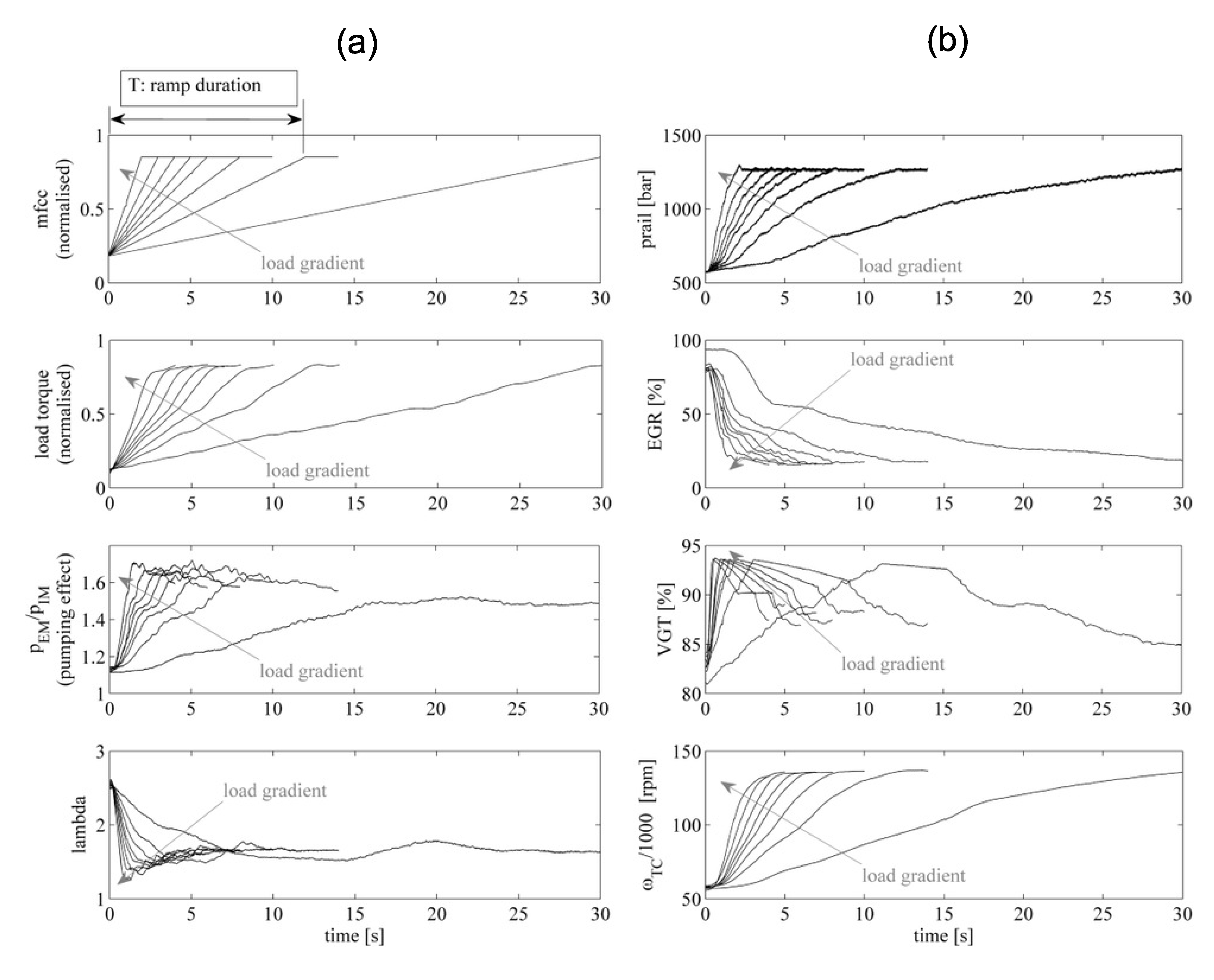
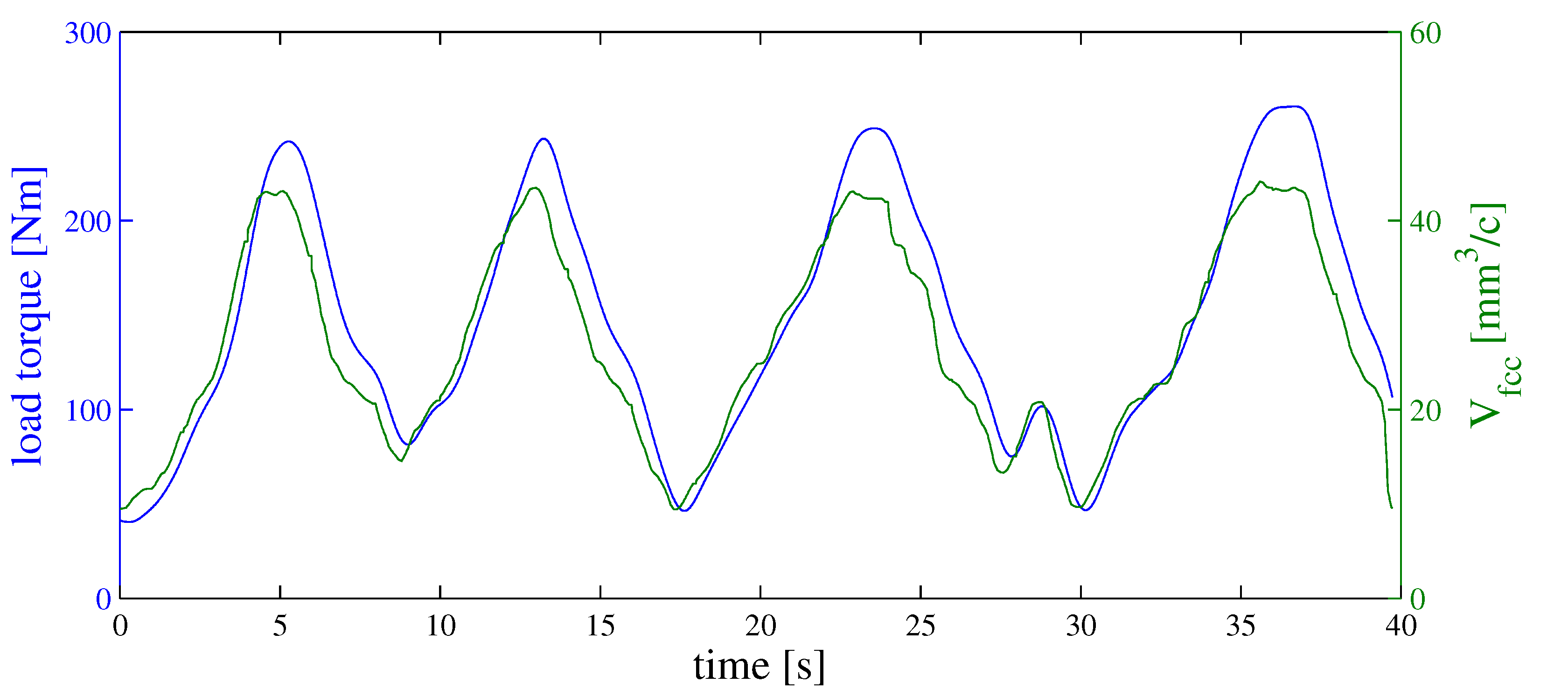
mfcc). To investigate the typical dynamic behavior of the engine, load transients at constant engine speed are performed by operating the engine over load ramps, and the results are analyzed in terms of fuel consumption and emissions. With the aim of exploring the entire load range, fuel ramps from 10% to 85% of maximum load and with different durations, have been carried out on the testbench (see
Figure 1). Looking at
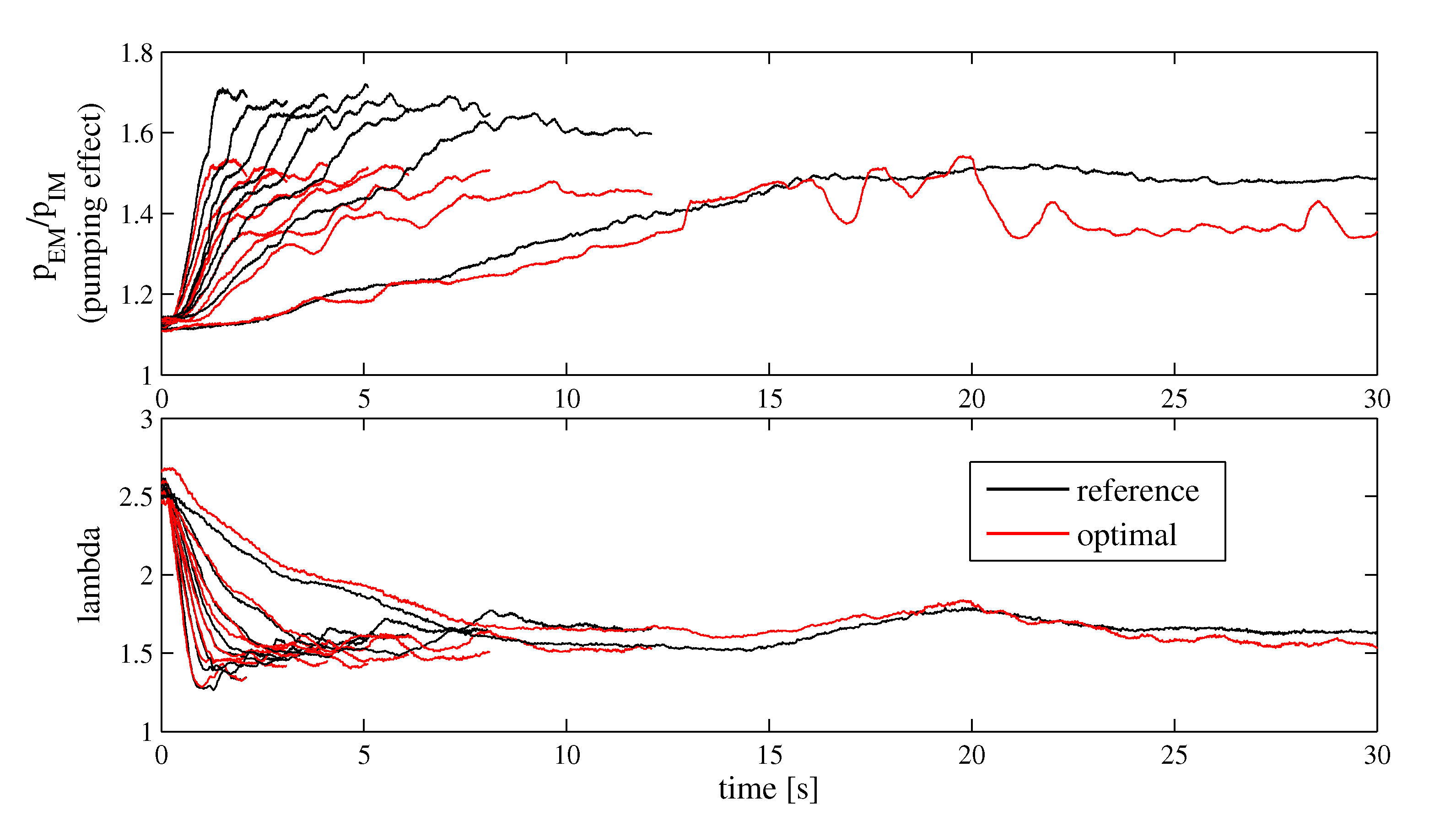
Figure 2, the slowest ramp (30 s duration) can be considered to represent the static case,
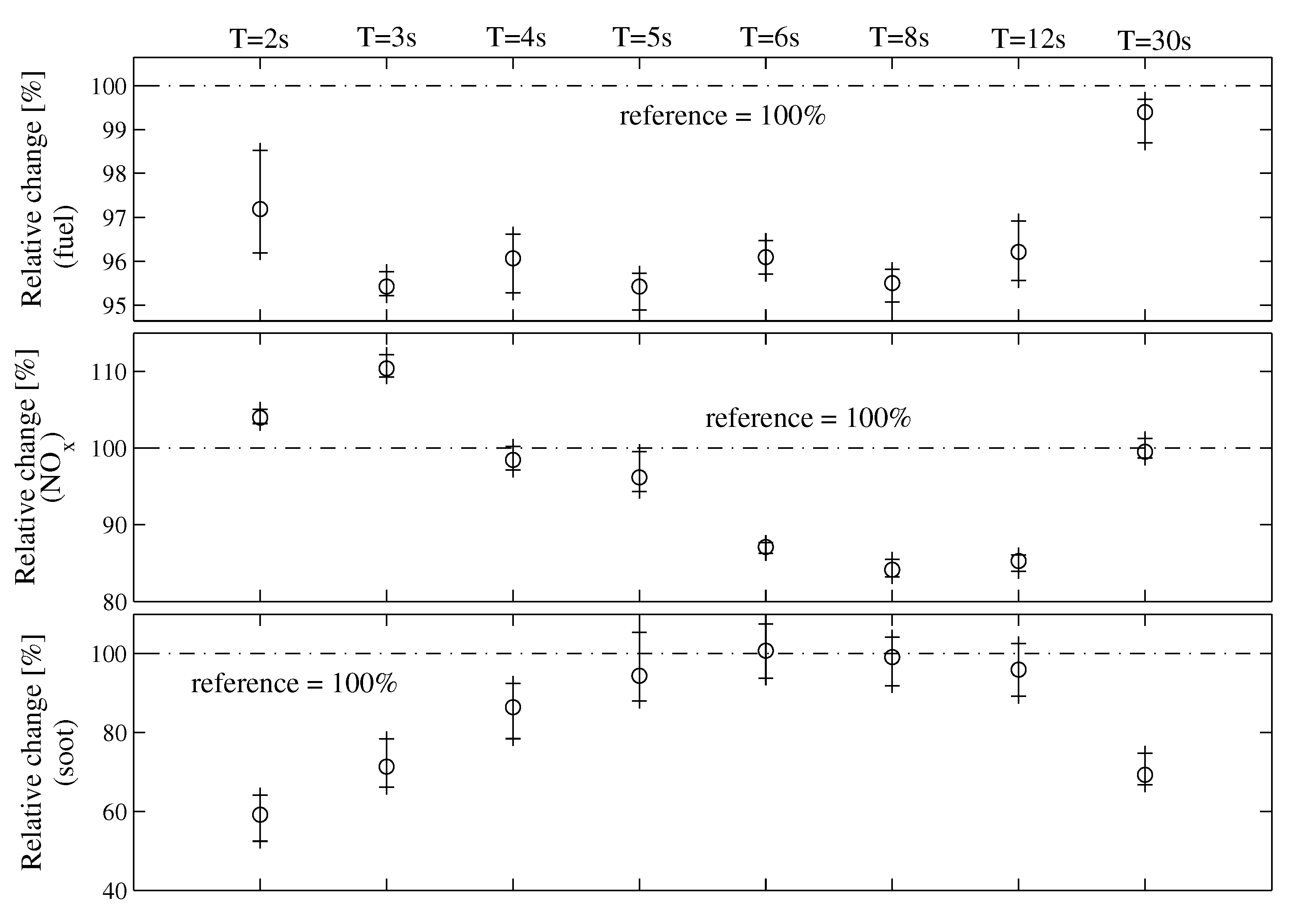
i.e., to consist of a sequence of steady-state conditions. The results in
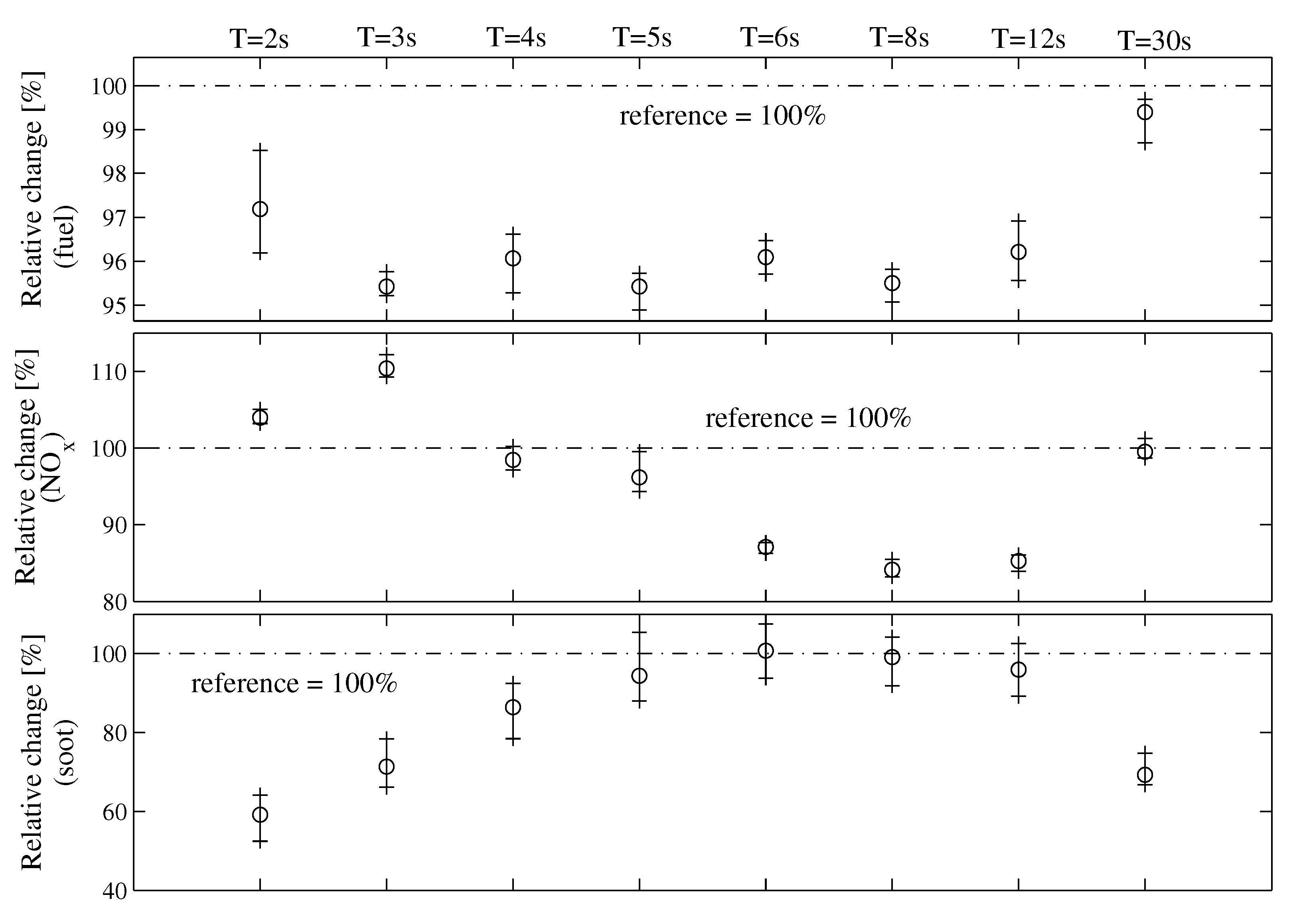
Table 2 show cumulative fuel consumption, NO
x and soot emissions variations with respect to this stationary-like profile. From now on, the values of the three quantities just mentioned are always normalized with respect to the integrated engine power, to allow for meaningful comparisons. It turns out that the higher is the load gradient, the higher is the specific fuel consumption. Despite this statement could be quite predictable, figuring out the responsible physical effect is of sure interest. The third graph in
Figure 2a shows that the increasing pumping effect corresponding to increasing gradients, is the main reason for the fuel penalty. In other words, the faster is the transient the higher is the negative backpressure effect caused by the turbine. This effect disappears as soon as quasi-static state conditions are reached.
Figure 1.
Feedforward (FF) control based on the steady-state actuator set-point maps.
Figure 1.
Feedforward (FF) control based on the steady-state actuator set-point maps.
Figure 2.
Ramp profiles performed at 1950 rpm.
Figure 2.
Ramp profiles performed at 1950 rpm.
Table 2.
Effect of increasing load gradients: fuel, NOx and soot related to the integrated engine power (normalized quantities).
Table 2.
Effect of increasing load gradients: fuel, NOx and soot related to the integrated engine power (normalized quantities).
| Ramp duration (s) | 30 | 12 | 8 | 6 | 5 | 4 | 3 | 2 |
|---|
| 1 | 2.5 | 3.75 | 5 | 6 | 7.5 | 10 | 15 |
|---|
| fuel | 0% (ref) | 2.77% | 4.34% | 4.42% | 5.31% | 5.79% | 6.73% | 8.30% |
| NOx | 0% (ref) | 21.44% | 30.91% | 41.46% | 44.42% | 51.58% | 57.55% | 65.48% |
| soot | 0% (ref) | -15.37% | -15.53% | -18.81% | -19.24% | -10.42% | -3.79% | 31.83% |
This is the crucial point: a stationary lookup map by nature is not able to account for dynamic effects, so it sets the actuator set-point to the value that will be appropriate when the transient is over. This yields, for instance, a VGT position that increases the engine backpressure with negative effect on efficiency. When the VGT is closed in order to increase the IM pressure (
pIM), the exhaust pressure (
pEM) increases too, but with a faster dynamic, resulting in a growing effect of the backpressure. This is proven by the third graph which shows the ratio between
pEM and
pIM. Moreover, it is also true that the air handling system has a slower dynamic than the fueling system, so an air reservoir is needed to prevent an excessive air-to-fuel ratio (AFR) reduction during a positive load gradient. The fourth graph in
Figure 2a proves this statement, showing the drop of the lambda value, ever more accentuated as the load gradient increases. The phenomenon just explained does not depend only on the TC but also on the EGR rate, so that the combined effect of these two control levers has to be taken into account.
Obviously all the considerations presented so far have also an influence on exhaust emissions, as shown in
Table 2. Concerning NO
x emissions, there is a combined effect of the reduced amount of air entering the cylinders and the delayed effect of the EGR, which together lead to a higher combustion temperature. The soot trend is not as monotone as the NO
x one, and the reason can be related to several aspects. First of all, the measurement device is not fast enough to capture the transient peaks, resulting in a potentially misleading cumulative value. We also remind the reader that we are measuring raw emissions, while the traditional use of the engine at hand sees a diesel particulate filter (DPF) installed on the exhaust line, resulting in a drastic reduction of tailpipe soot emissions. Moreover, this aspect does not represent a limitation regarding the validity of the presented results, since, as remarked later, soot emissions are considered as a qualitative quantity not to be widely exceeded. Another control lever which strongly effects fuel efficiency and NO
x emissions is the crank angle corresponding to the start of injection (SOI). This control input directly influences the combustion process and thus no dynamics are related to it directly. However, it may be used to compensate for the transient effects described above, which is also proposed in [
16]. For this reason, the SOI is included in the dynamic optimization procedure proposed below.
Once the indisputable effect of transients has been remarked on, it comes out that finding the perfect combination of multiple cross-coupled control inputs is a difficult engineering problem, which cannot be solved with just a calibration-based approach. We propose a synergy between mathematical models representing the engine, optimal control theory, and specific dynamics-accounting experiments carried out on the real engine. Before describing the new control structures derived, all methods concerning engine models and optimal control are outlined in the next sections.
2.2. Engine Model
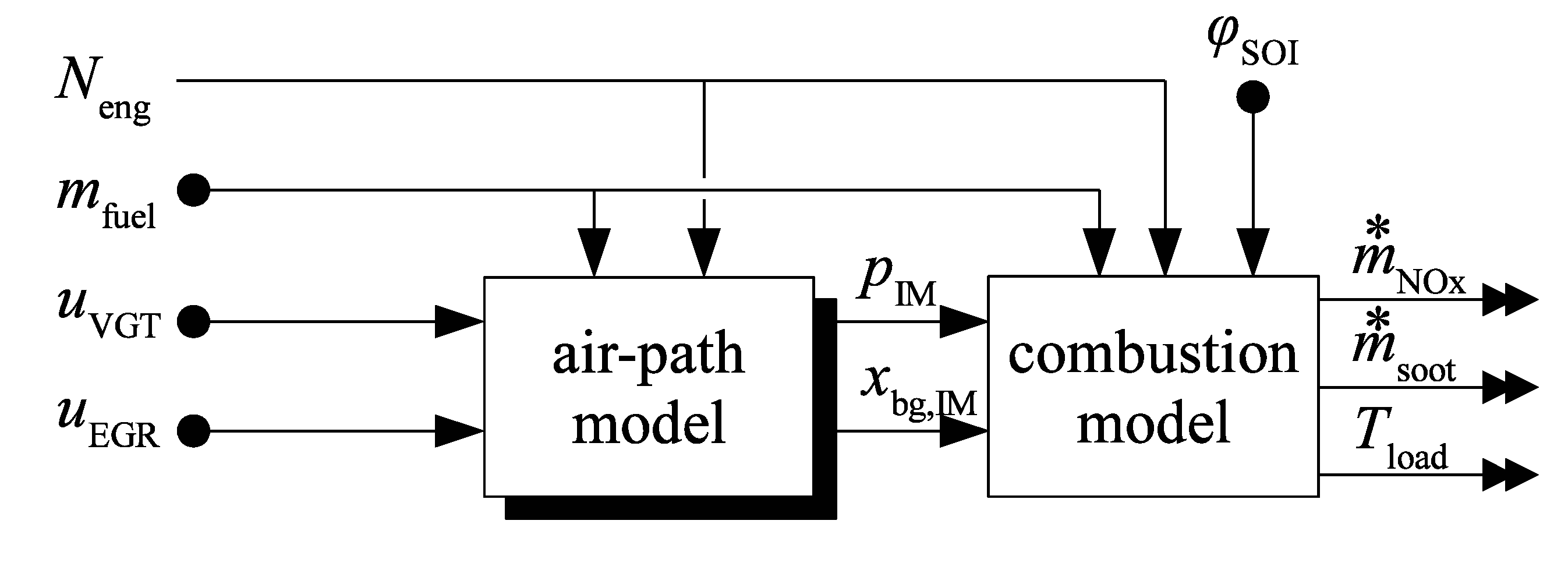
The model can be subdivided into a dynamic and a static part as illustrated in
Figure 3. The subscripts denote the intake and exhaust manifolds (IM/EM), the volume between the turbine and the exhaust-gas aftertreatment system (ATS), and the TC. The positions of the VGT and the EGR valve are pulse-width modulation signals with a range of [0,1]. The SOI is specified in degrees before top dead center (BTDC). Finally, the burnt-gas fraction in the IM is denoted by
xbg,IM.
Figure 3.
Structure of the engine model.
Figure 3.
Structure of the engine model.
All dynamics are induced by the air path,
i.e., the TC inertia and the volumes. The full model is represented in state-space form as:
where the
nx = 6 state variables, the
nu = 3 control inputs, and the outputs are:
The engine speed (
Neng) and the fuel mass injected (
mfcc) are treated as time-varying parameters, moreover both are fixed during the optimization procedure. The outputs of the air-path model,
i.e., the dynamic inputs to the combustion model, are denoted by
v := (
pIM,
xbg,IM)
T, with:
2.2.1. Air-Path Model
The mean-value model for the air path, adopted from [
13], is extended to include the EGR, and an additional restriction representing the exhaust-gas ATS. The new model parts are briefly described next.
The EGR valve is modeled as a modified form of the simplified isenthalpic orifice [
1] with a variable effective cross-sectional area:
For the temperature difference across the exhaust gas cooler (EGC), a simple stationary energy balance is evaluated. The average of the inflow and outflow temperatures is used as the representative temperature, which yields:
The temperature of the cooling-fluid is assumed to be constant,
i.e., ϑ
clf = 360 K, and the efficiency parameter kEGC depends on the mass flow:
Differential equations: The change of the state variables,
i.e., the equations defining Equation (1a), represent balances for mass and energy. In the intake receiver, the mass balances for the air and the burnt gas as well as the energy balance is resolved for the state variables pressure, temperature and burnt-gas fraction
:
The subscripts CP and IC denote quantities corresponding to the compressor and the charge-air intercooler, respectively. The burnt-gas fraction in the exhaust gas is:
where σ
0 is the stoichiometric ratio of air and fuel flow (or mass) into the cylinder. A simple mass balance is applied in the volume between turbine and ATS, and a momentum balance defines the change of the TC speed, see e.g., [
1,
13].
2.2.2. Combustion Model
Time-variable quadratic setpoint-deviation models are used for the emissions and for the combustion efficiency. The vector
w =(
pIM,
xbg, φ
SOI)
T denotes all inputs to the combustion model. The model for each output thus reads:
with:
As can be noticed, the input to the combustion model is not exactly the vector
w, but rather its variation with respect to a reference vector. A detailed description of the identification procedure is presented in
Section 2.6, however the reference condition is nothing other than the starting ramp profile, while the real input Δ
w is generated by performing several variations of the control inputs along the reference trajectory. Such setpoint-relative models are often used for control and optimization applications [
17,
18]. The cross-terms of the full second-order Taylor expansion are omitted since also the
nu(
nu − 1)/2 cross variations would need to be performed to reliably identify the corresponding model coefficients. The effect of omitting the cross terms has been analyzed, resulting in a negligible effect on the combustion model accuracy. Usually the references for the inputs w are stored as static lookup maps over engine speed and load. During transient operation, such as the ramps shown in
Figure 2, the actual values of the dynamic inputs (
pIM and
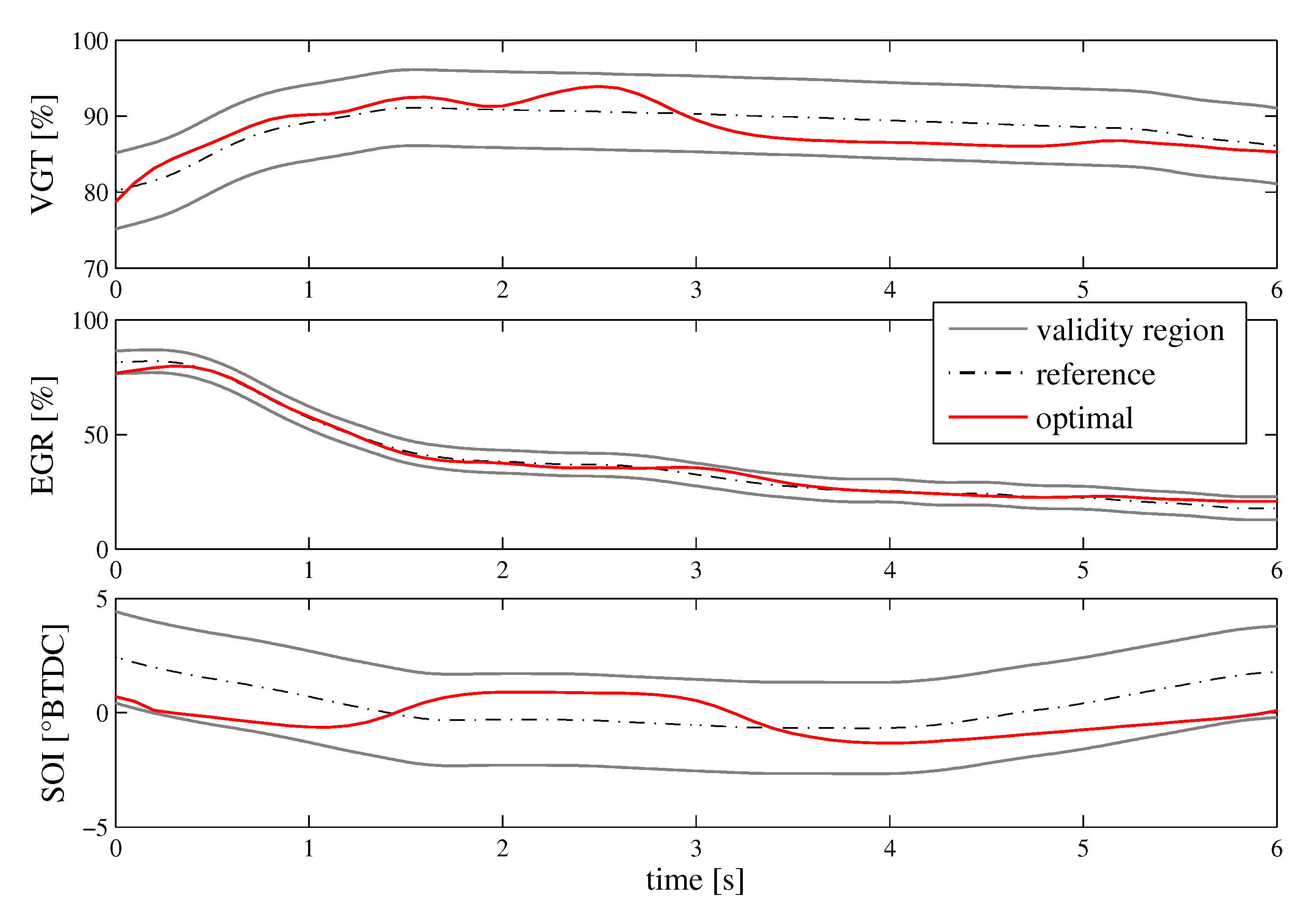
xbg,IM in the case at hand) can be far from the steady-state reference values. By using time-resolved reference values and correction factors, the validity range of the model is relocated to the actually relevant region, which is illustrated in
Figure 4.
Figure 4.
Exemplary static and dynamic references over a load step, and the validity regions of the corresponding setpoint-relative models.
Figure 4.
Exemplary static and dynamic references over a load step, and the validity regions of the corresponding setpoint-relative models.
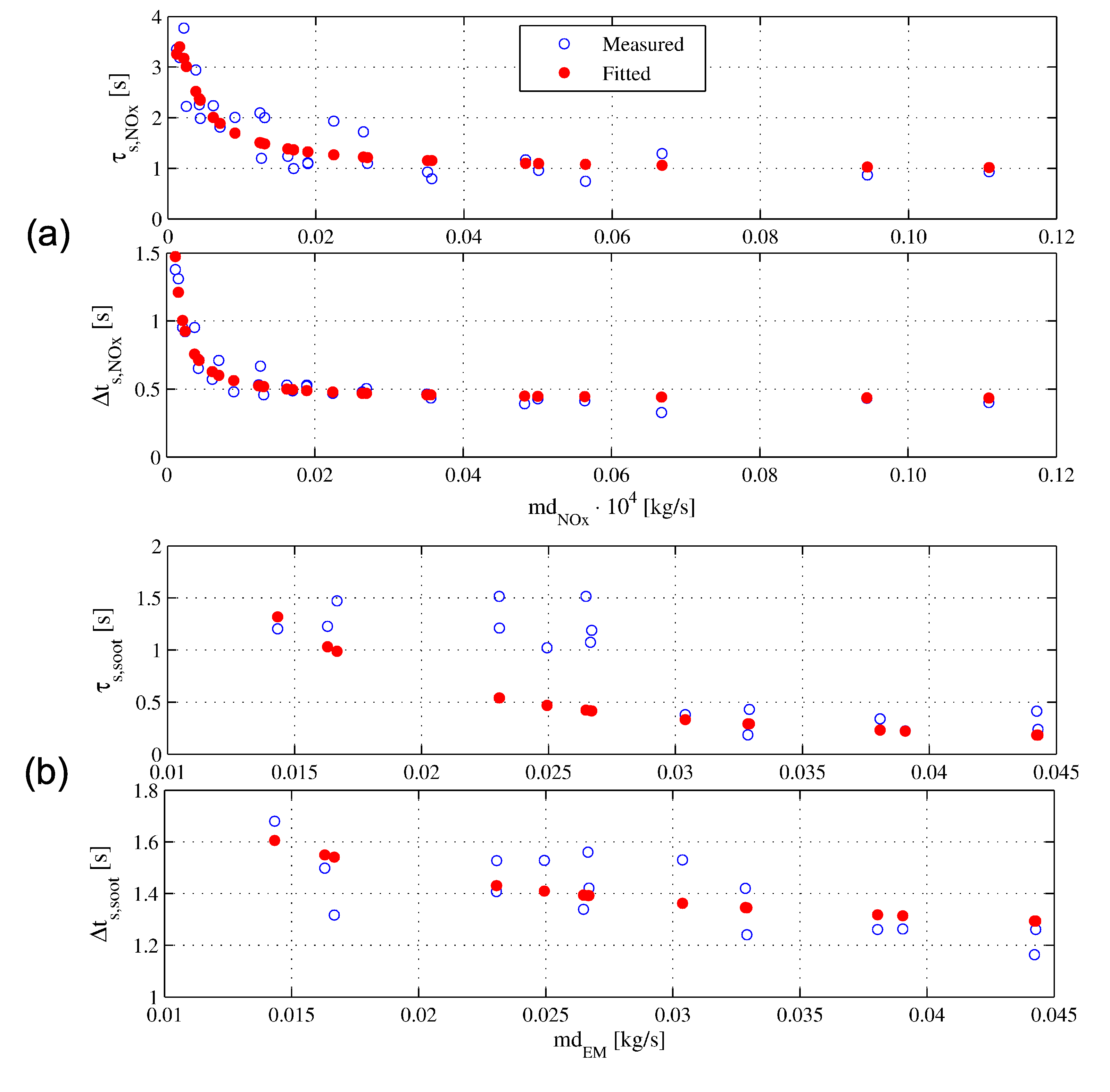
2.3. Sensor Dynamics of the NOx and Soot Sensors
A further critical aspect regarding empirical modeling of engine-out emissions, is the phase shift between transient engine events and transient emission measurements. In the case at hand the NO
x emissions are measured by a Continental UniNO
x sensor, while the soot emissions are recorded by means of an
AVL Micro Soot Sensor. Accounting for the transient transport delays and sensor lags, which together constitute the phase shift, is very important for the quality of the model prediction. For this reason, the dynamic characteristic of the sensor signals has been modeled as a first-order lag element, with a time delay resulting from the transport of the gas to the sensor. The signal ξ
s,i of emission sensors, can thus be expressed by the differential Equation (9), where
i corresponds to the emission species NO
x or soot:
the variable ψ
i refers to the corresponding engine-out emission species that reaches the sensor after a delay of Δ
ts,i. In order to influence the engine-out emissions separately, measurements with stepwise changes in the SOI and in the EGR valve have been carried out, for several engine speeds and loads. The recorded emission signals have then been used to identify the sensor dynamics of the NO
x and soot sensors, respectively.
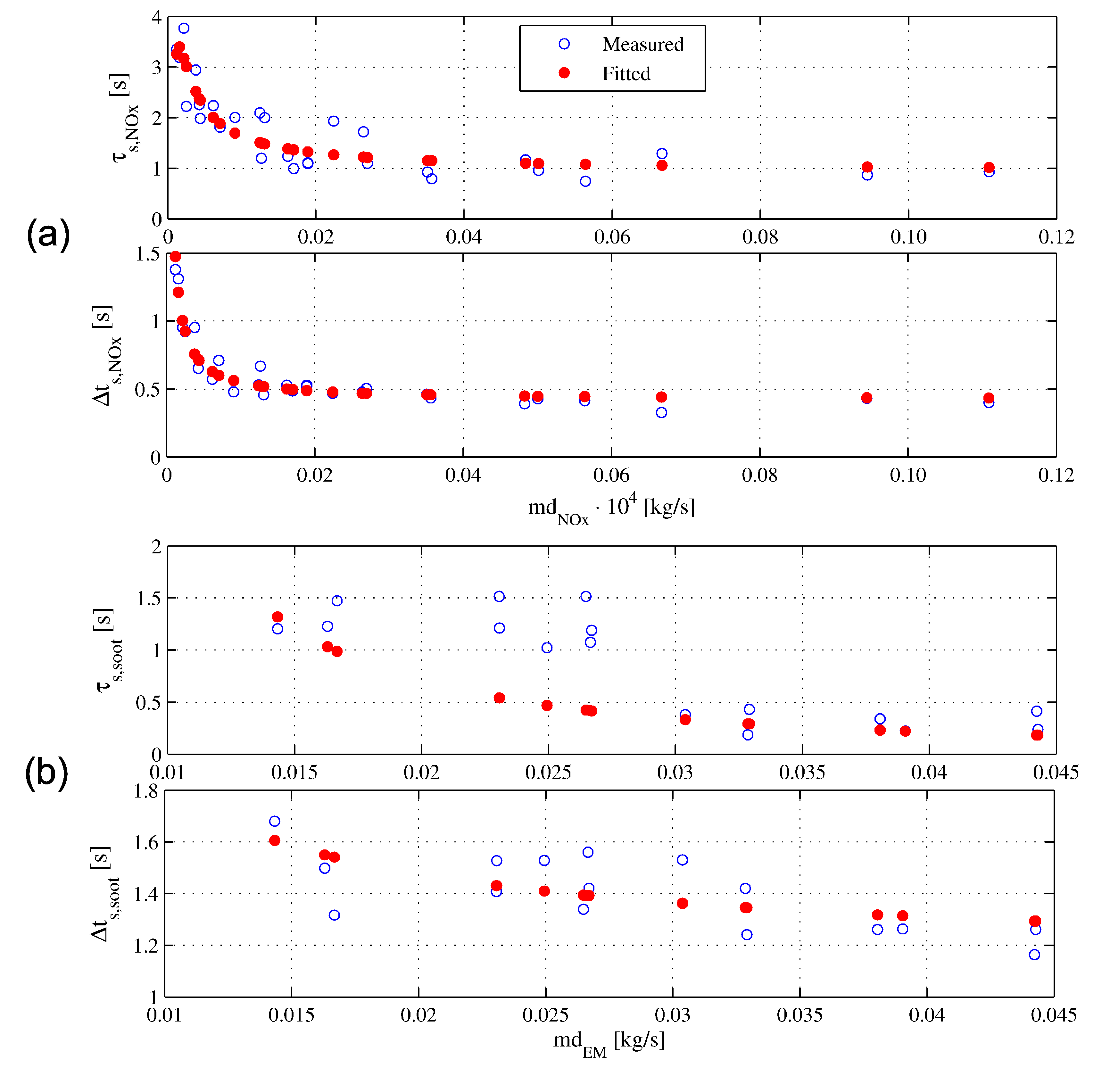
Figure 5 shows the results of the identification. Interesting correlations with the NO
x mass flow (md
NOx in figure) and the total exhaust mass flow (md
EM in figure) have been observed, respectively for the NO
x and soot sensors. For this reason, the fitted curves shown in red dots have been used to account for the sensors dynamics within the combustion model. Note that the dynamic characteristics of the Micro Soot Sensor are significantly influenced by the dilution ratio. In the event of low ambient temperatures or insufficiently diluted exhaust gas there is the risk of the formation of condensate in the measuring chamber. In order to avoid condensate formation, sufficient dilution of the exhaust gas should be provided for. On the other hand, the delay and the time constant are smaller for low dilution ratios. As a compromise a dilution ratio of 5 (in a range of 2–20) has been used for the experiments.
Figure 5.
Trend of the time constant τs,i and the time delay Δts,i identified for: (a) NOx sensor; and (b) soot sensor.
Figure 5.
Trend of the time constant τs,i and the time delay Δts,i identified for: (a) NOx sensor; and (b) soot sensor.
2.4. Numerical Optimal Control
The optimal control problem (OCP) considered here can be cast in the following form:
With
.
The cost function is the integrated power over the load ramp profile, called
Eload in Equation (10a). The instantaneous fuel mass flow
is integrated to yield the cumulative fuel consumption
mfuel. The true objective would be the minimization of the specific fuel consumption, which can be expressed as:
, but the fuel quantity is assigned for each ramp, so it never changes. Consequently, the target becomes the maximization of the energy released, in other words the net engine power (or
Tload being
Neng constant). The dynamic constraints in Equation (10b) enforce the model equations and Equation (10c) limits the cumulative emissions. Considering that the soot measurements exhibit a large variability, which is also present in the identification data, the corresponding model is not as reliable as the NO
x model. Despite that, a cumulative constraint for soot emissions is anyways set during the optimization, but more permissive, otherwise the optimization could be negatively effected, resulting in a suboptimal solution for the main objective. Detailed information about the numerical methods required for optimal control of diesel engines may be found in [
14].
Direct transcription. The continuous-time OCP in Equation (10) is transformed into a finite-dimensional mathematical program by direct transcription. The Euler-backward integration scheme is applied to consistently discretize the full problem. The set of differential Equation (10b) is transformed to:
where
xk:=
x(
tk). A uniform step size of
h = 0.1
s is used. All integrals are approximated as a sum:
where
N denotes the total number of discretization points. The bounds on the control inputs and on the state variables are imposed at the discretization points. The resulting mathematical program has the values of the control inputs and the state variables at the discretization points as decision variables. It can be solved efficiently due to its sparse structure [
19]. In this work, the solver Sparse Nonlinear OPTimizer (SNOPT) is used [
20].
2.5. Experimental Setup
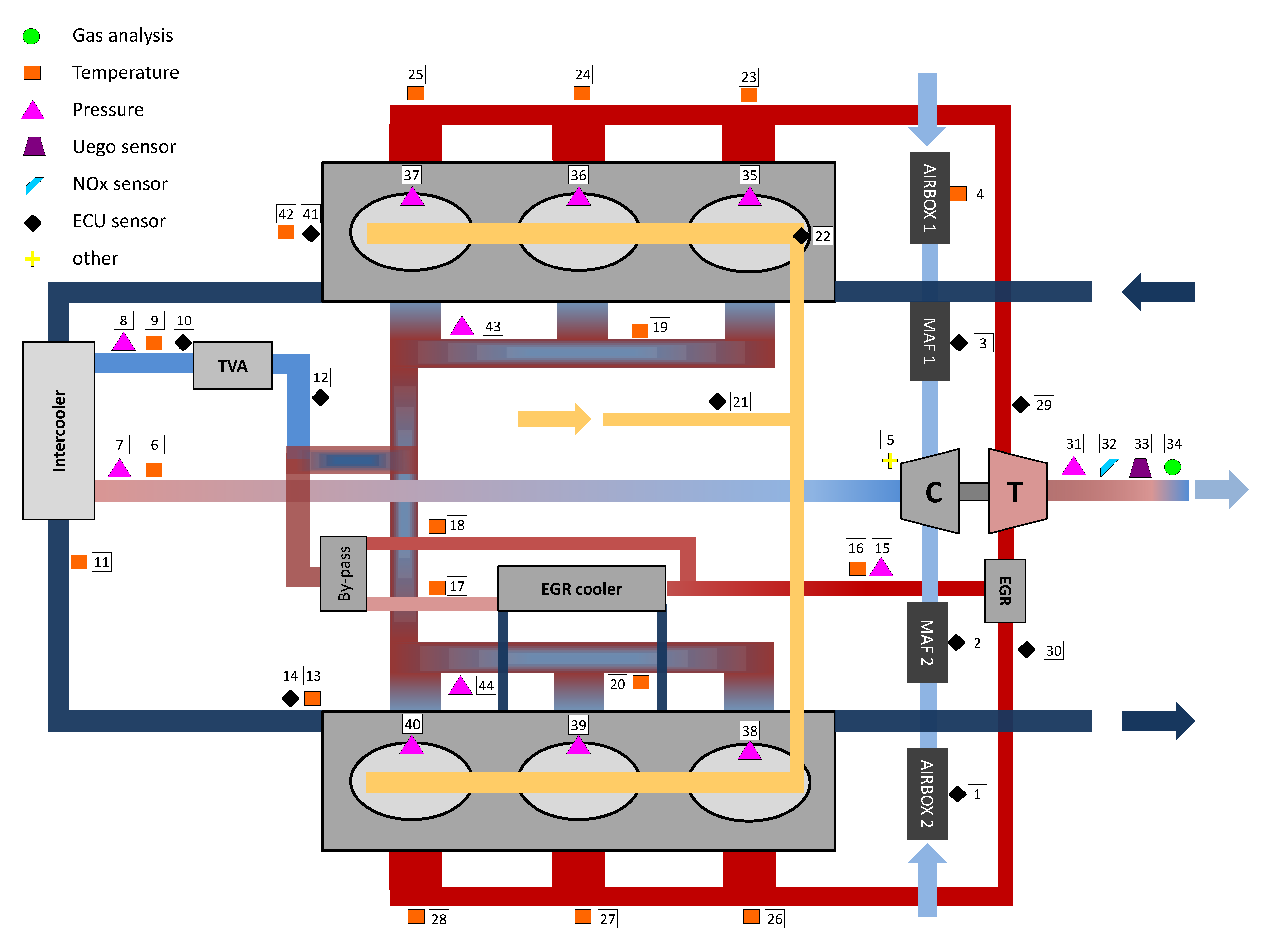
All measurements are performed on the diesel engine specified in
Table 1. The signals required to identify the air-path model are obtained from standard electronic control unit (ECU) sensors installed on the engine as well as some additional sensors for the temperature and the pressure at specific locations.
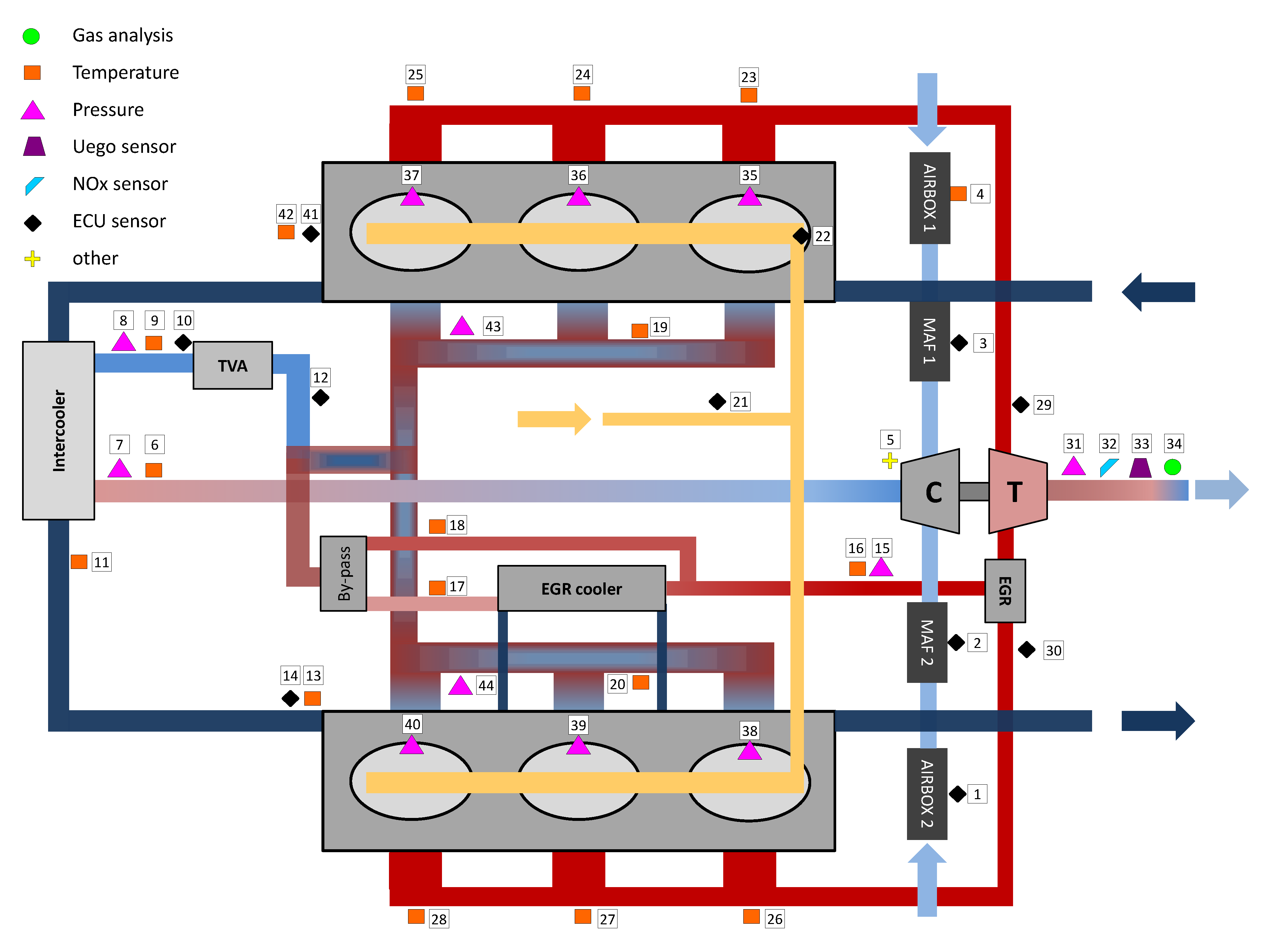
Figure 6 shows the sensors’ layout installed on the diesel engine used in this work. The testbench is equipped with a dynamic brake which is controlled by a dSPACE rapid prototyping system. This system is able to prescribe arbitrary profiles for the engine speed and load.
Figure 6.
Layout of the diesel engine used in this work, showing the various types of sensors installed. ECU: electronic control unit.
Figure 6.
Layout of the diesel engine used in this work, showing the various types of sensors installed. ECU: electronic control unit.
The engine is controlled by a development ECU, which slightly differs from the end of line version implemented on the production vehicle. The Ethernet-based ETK interface by ETAS (Stuttgart, Germany) provides direct access to the control variables and parameters of the ECU via the parallel data and address bus, or via a serial microcontroller testing or debugging interface. The ETK interface is real-time capable, and provides a universal ECU interface for sophisticated applications in the development and calibration of engine ECUs. The interface is supported across the board by ETAS hardware modules, the INCA calibration tool as well as the INTECRIO and ASCET development tools. The need to develop, add and/or bypass some control structures implemented on the ECU has been fulfilled by the utilization of a Rapid Prototyping Module (ES910 by ETAS), in combination with the software package INCA-experimental target integration package (EIP). INCA-EIP enables real-time function developers to use the measurement and calibration functionality of INCA while the ECU software functions are executed on the ES910. The ES910 prototyping and interface module combines high computing performance with all common ECU interfaces in a compact and robust housing. A schematic representation of its interaction with the ECU and the Host PC is shown in
Figure 7. CAN and LIN interfaces provide the connection of the ES910 module to the ECU bus and to the external CAN-modules (input/output operations). This setup provides complete control over all relevant control inputs of the engine.
Figure 7.
Hardware, software, and interfaces of the testbench setup. EIP: experimental target integration package.
Figure 7.
Hardware, software, and interfaces of the testbench setup. EIP: experimental target integration package.
The prototyping tool INTECRIO is used to set up the rapid-prototyping models, previously designed in Simulink (by MathWorks, Natick, MA, USA) on the ES910. During the INTECRIO experiment the user has runtime access to the model executed by the ES910 module. With such an experimental setup any ECU function can be bypassed, allowing for the development and the implementation of custom control algorithms. In the case at hand, the by-pass functionalities needed to perform the ramp profiles have been developed in Simulink by designing a custom engine management software for this exact purpose. Each control input profile, corresponding to the requested ramp, is set up and uploaded before running the test; when the stationary condition is reached, the by-pass is activated and the ramp is performed.
2.6. Optimization Procedure
The dynamic optimization procedure relies on two modes of operating the engine:
The ECU with its standard calibration controls the engine, in particular it prescribes the fuel profile related to each ramp. The testbench controller has to guarantee the desired engine speed (constant in this case). This mode is used for the initialization of the optimization procedure. The resulting trajectories of the controls (VGT, EGR and SOI) are recorded.
Time-resolved trajectories are prescribed for all control inputs using the rapid-prototyping module and the bypasses of the ECU. The testbench controller has exactly the same task as in Mode A). This mode is used for all variations runs as well as for validation.
The inputs to the procedure are the transient profiles of
Figure 2, performed one at a time, by using a standard engine calibration that is able to operate the engine along this profile. The following list describes the individual steps of the dynamic optimization:
Initialization: drive the profile in Mode A. Save the resulting trajectories of the control inputs u(t).
Perform 1 + 4·
nu testbench runs in Mode B. Thereby, apply:
- (a)
the reference controls u(t), and
- (b)
two perturbations of all controls towards each direction, i.e.,
ui(t) ← ui(t) ± {0.5·Δui, Δui}, for i = 1, ..., nu.
Run simulations of the air-path model for all variations.
Use the state trajectories of the air-path model and the measured emission and torque trajectories from Step 2, to identify the torque and emission models around the current references.
Solve the control and state constrained OCP in Equation (10) to derive the improved control trajectories
u∗(
t). Thereby, set:
Using the simulated state trajectories during the identification of the combustion model in Step 3 ensures a consistent prediction of the emissions and of the torque inside the validity region. Since the identification of the models for the air path and for the combustion are identified separately, the physical causality is preserved. More exactly, there is no way that the combustion model corrects errors in the air-path model or vice-versa. Although a combined identification could yield a slightly higher accuracy, it would introduce unphysical cross corrections. Furthermore, the identification procedure would become more complex and non-convex.
In order to automate the optimization procedure, it has been necessary to manage remotely some basic functionalities provided by INCA, such as setting calibrations, reading signals and recording measurements. This additional functionality can be achieved through several methods; our choice consisted in a COM communication established between Matlab and INCA, by means of an in-house Matlab script.
2.7. From Time-Based to Map-Based Optimal Control
The optimal control input set, achieved with the optimization procedure, is non causal and valid only for the specific profile used for the optimization, as opposed to a conventional table or map-based control structure. Moreover, if we refer to
Figure 1, there is not a unique optimal trajectory for a given speed, but several, corresponding to each ramp performed. It is thus of particular interest to find a way to transform these control trajectories to an operating point based representation, while preserving the information about the optimal solution. Accepting the fact that it is unfeasible to keep intact the content of the time-resolved control vector, its information could be stored in a scalar value of a new lookup table, namely the transient compensation map. Since this map has to be activated only when transients occur, a direct dependency with the load gradient is needed. Therefore, the second quantity, besides the engine speed, that spans the compensation maps is the derivative of the fuel quantity, while the fuel quantity itself is used for the steady-state maps.
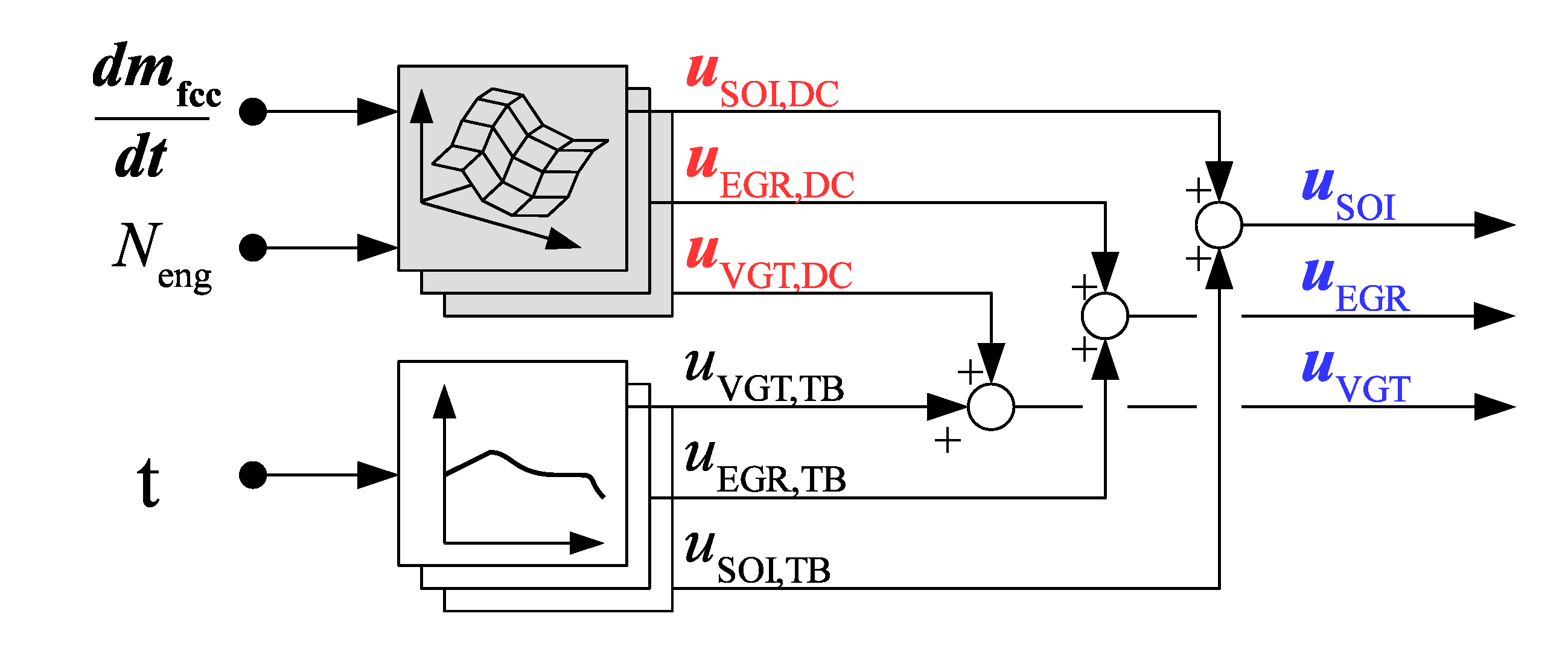
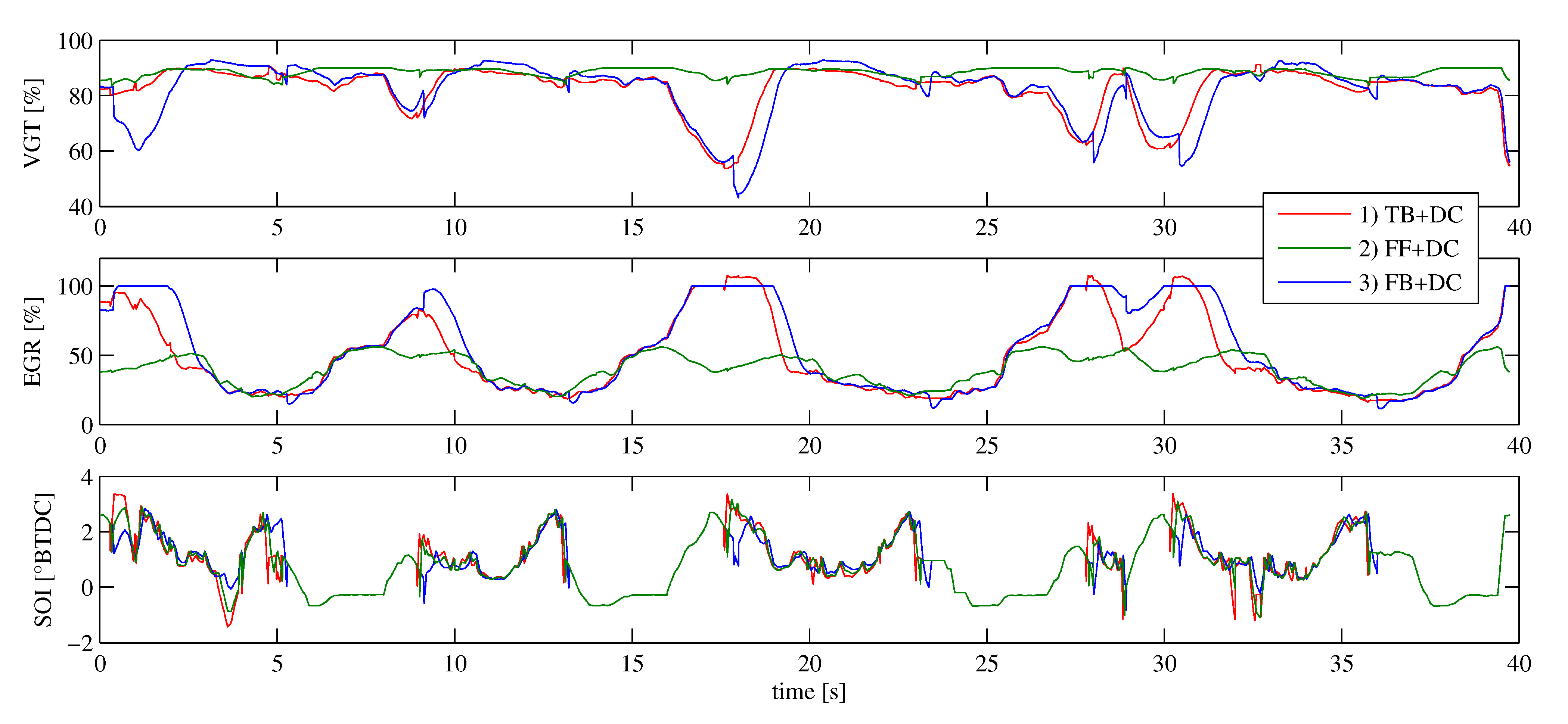
Figure 8 shows the two solutions proposed, both based on compensation maps that contain the information derived from the solution of the OCP. What distinguishes the two control structures is the way the cylinder charge is managed, while the SOI is treated identically. Controlling the cylinder charge is equivalent to controlling the IM pressure pIM and the burnt-gas fraction
xbg,IM, by means of EGR and VGT, which represent the relevant actuators. In the first case, as shown in
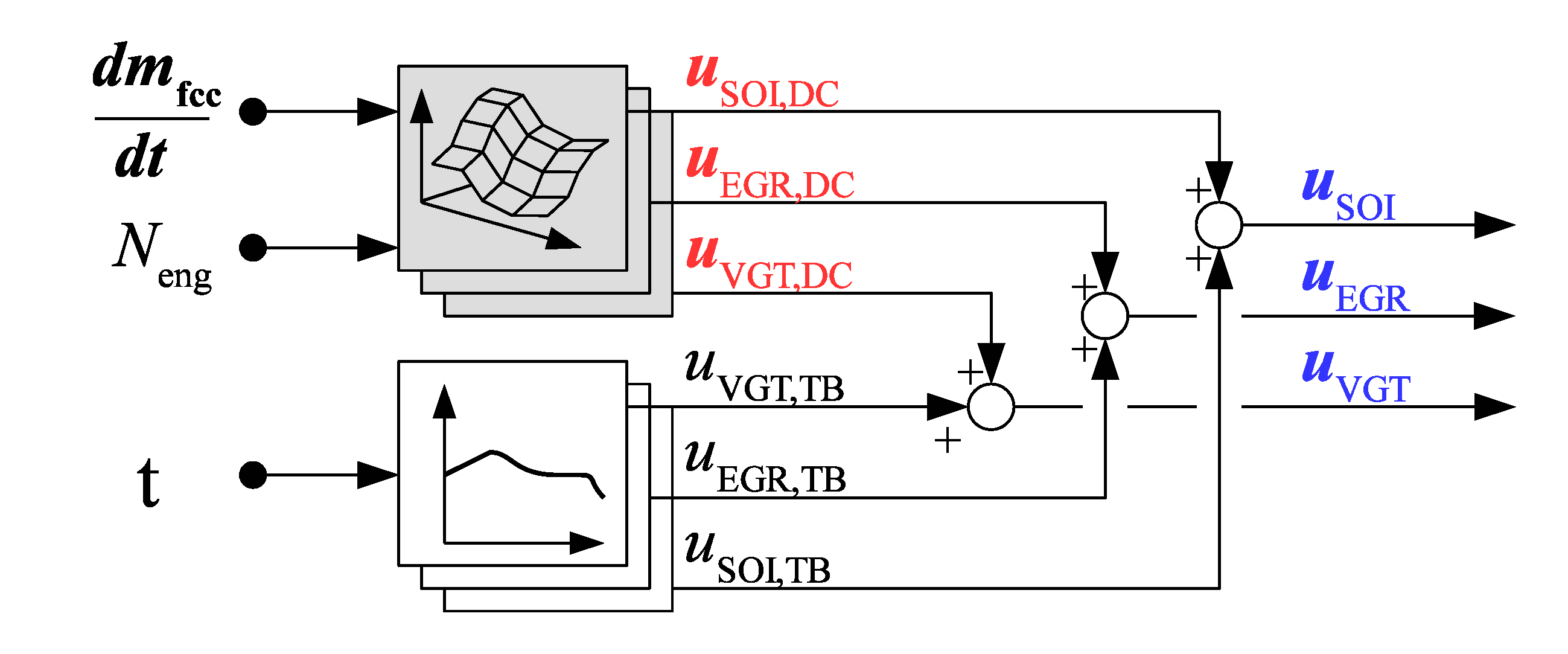
Figure 8a, the physical conditions in the IM are not considered at all, resulting in a FF control based on the steady-state actuator set-point maps. Because of its simplicity, this control structure is still used as basic layer in engine control systems. Unfortunately, as soon as a transient occurs all its limits come to light, suggesting that a pure steady-state approach is not satisfactory anymore. Enhancing its performance, by adding information related to transient operation, can be an interesting solution, especially if such a simple structure can be preserved. The compensation maps are highlighted, and their outputs are the dynamic compensation (DC) factors to be applied to VGT and EGR. If the load request gradient is below a certain threshold, set within the compensation map, there is no alteration of the stationary actuator set-point.
Figure 8.
(a) FF control based on the steady-state actuator set-point maps: compensation of actuator set-point values; and (b) feedback (FB) control of the state variable set-point maps: compensation of state variable set-point values.
Figure 8.
(a) FF control based on the steady-state actuator set-point maps: compensation of actuator set-point values; and (b) feedback (FB) control of the state variable set-point maps: compensation of state variable set-point values.
The second case, shown in
Figure 8b, is characterized by an alternative and more complex kind of cylinder charge control, called air-path control. In this case, the actuation of VGT and EGR are feedback (FB) controlled, therefore the set-point variables are
pIM and
xbg,IM. The implementation of this advanced control structure has been possible thanks to the rapid control prototype (RCP) system presented in
Section 2.5. All details about the air-path controller implemented and used during the experimental validation, can be found in [
21]. Differently from the previous case, the lookup tables store the steady-state set-points of the two state variables mentioned above. At the same time, the compensation maps act directly on these references for the FB controller. If the correction was applied directly to the actuators (
uVGT,FB and
uEGR,FB), it would act as a disturbance that the FB controller would try to compensate.
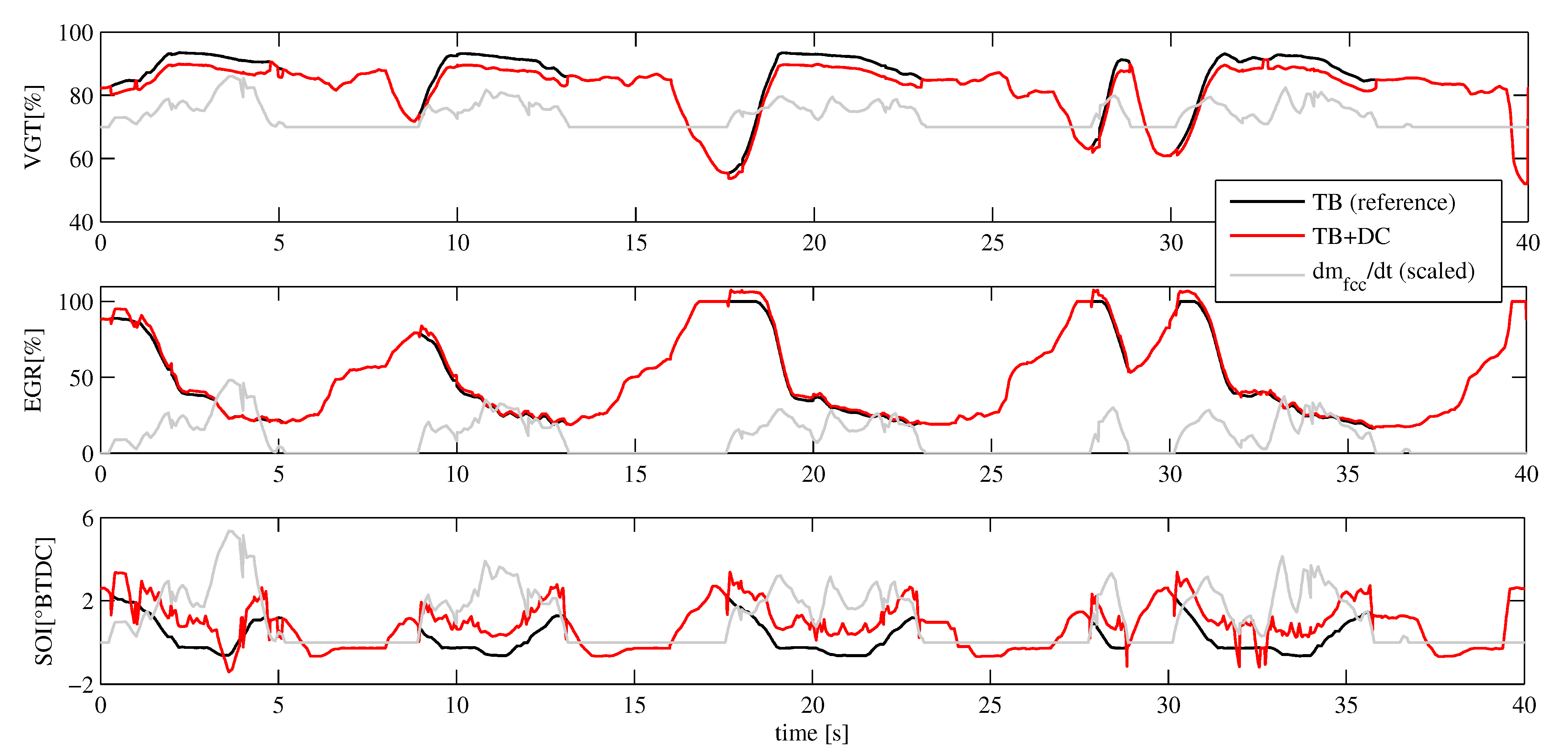
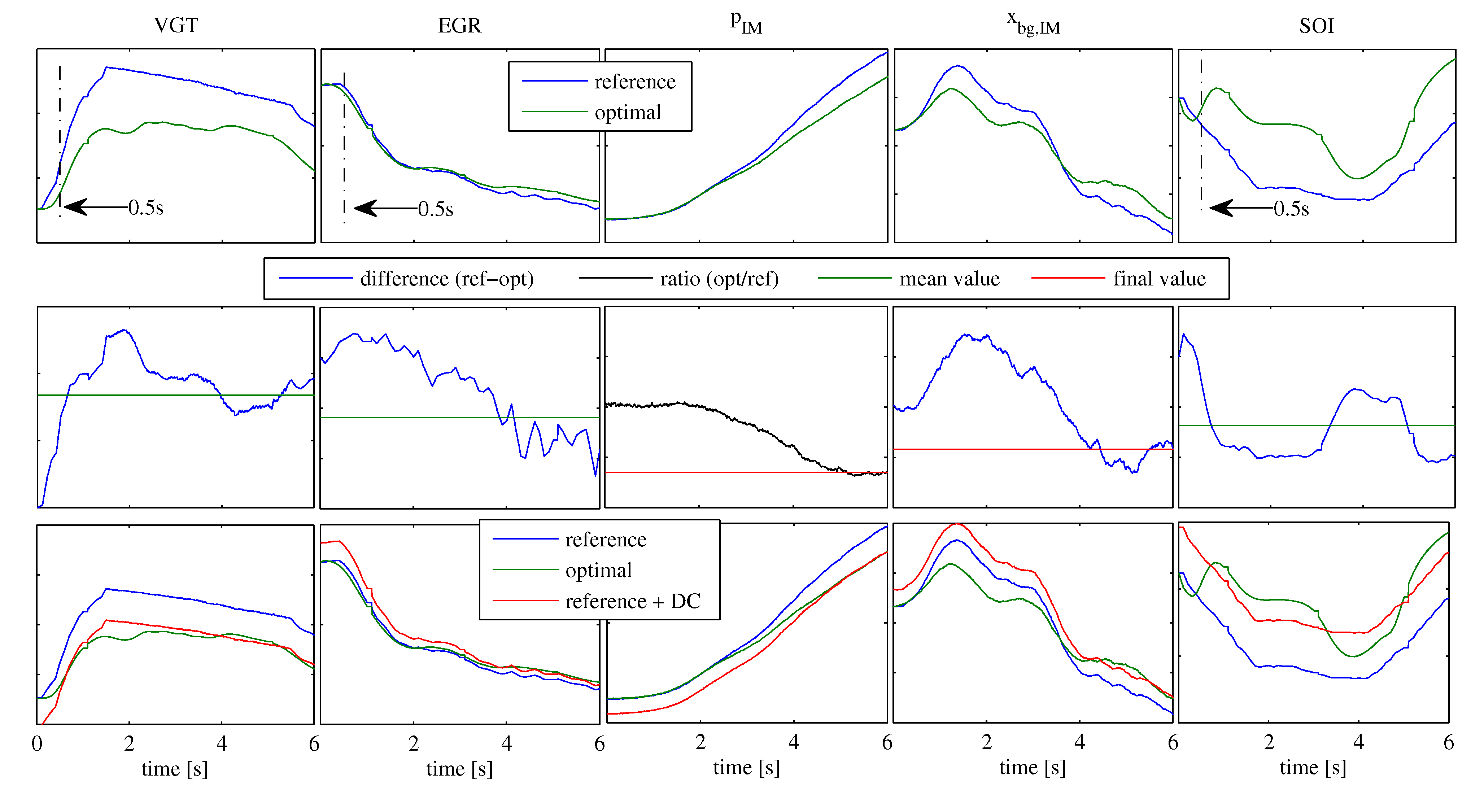
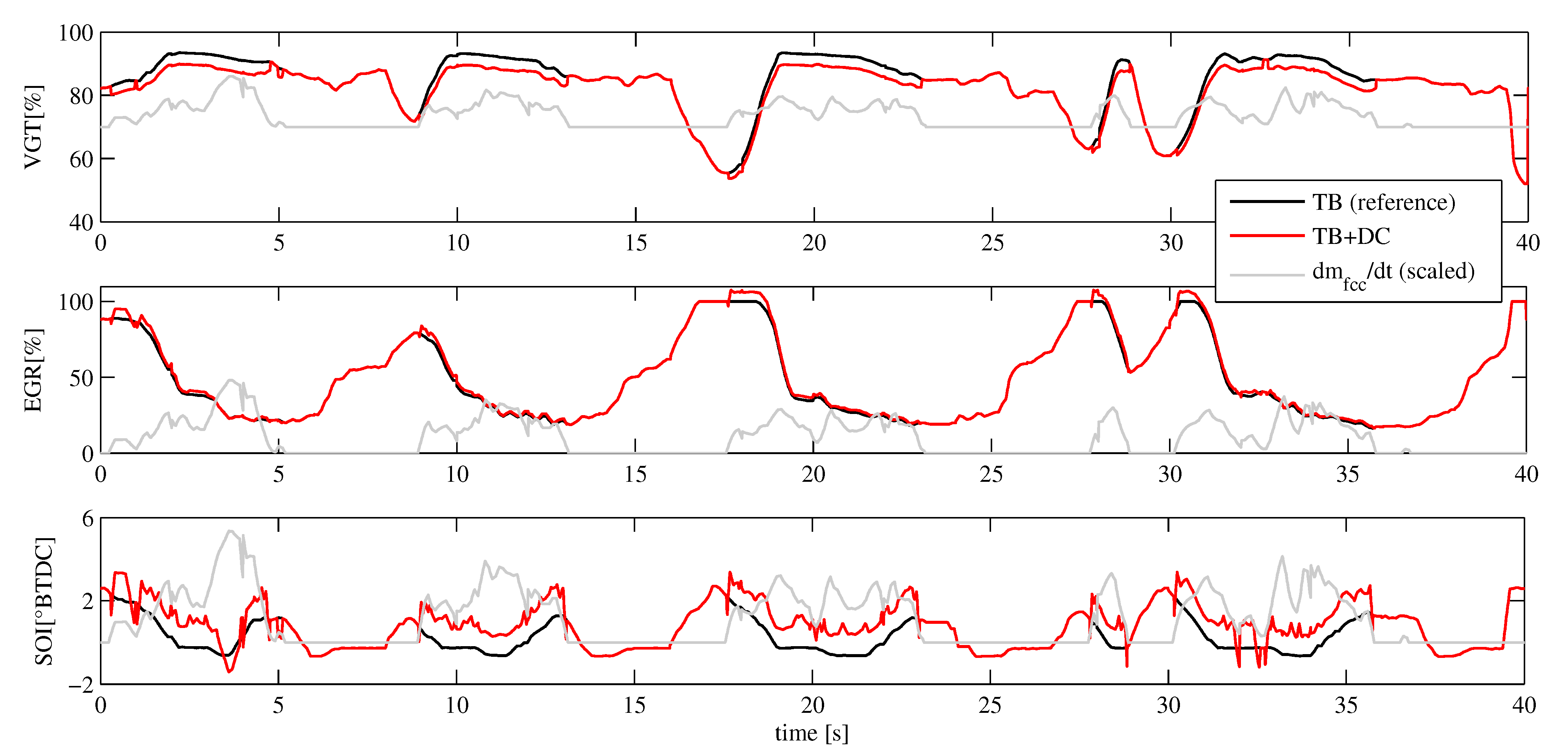
Regardless of the control structure, the DC maps have the goal to reproduce as strictly as possible the optimal trajectories.
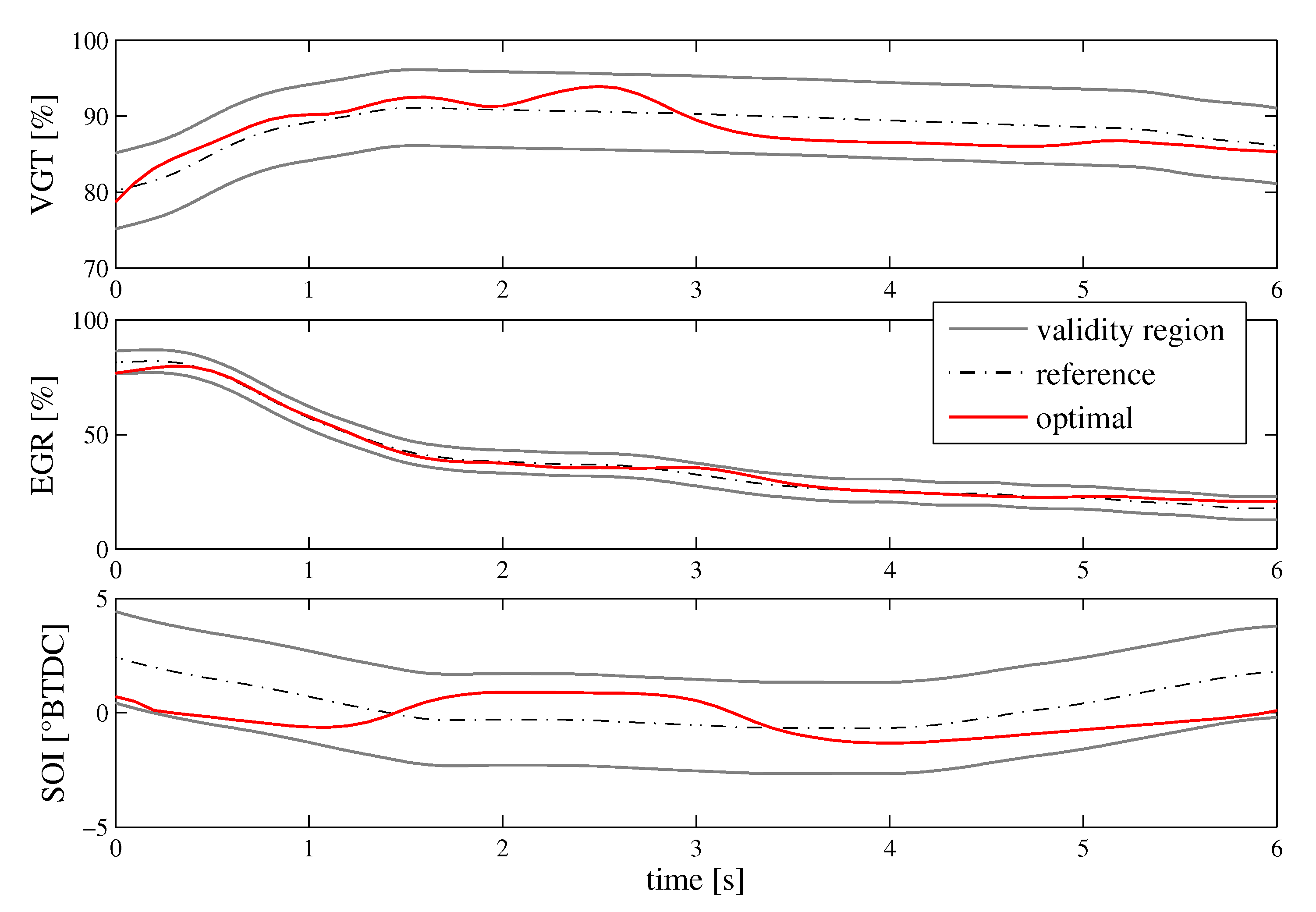
Figure 9 helps explaining how they have been derived, for one exemplary ramp profile. In the first row is shown the comparison between the reference trajectory, obtained by using a standard engine calibration with the ECU running in Mode A, and the optimized trajectory (
Section 2.6). VGT and EGR profiles are the real optimal control inputs derived from the optimization procedure, while
pIM and
xbg,IM profiles are the corresponding measurements. Since we are considering one single ramp profile, which means a single value of the fuel derivative, a single scalar value has to capture the information coming out from this comparison. The second row shows how the scalar value is calculated. For VGT and EGR, it is the mean value of the difference between optimal and reference trajectory, starting 0.5 s after the actual ramp starts (dash-dot line), since the initial conditions of reference and optimal controls coincide. For
pIM and
xbg,IM, the final value of, respectively the ratio and the difference between the trajectories is considered. The third and final row highlights the differences between optimal solutions and dynamically compensated reference control inputs. Coherently with the distinction made between the two control structures, VGT and EGR refer to Case (a) while
pIM and
xbg,IM refer to Case (b). For what concerns the SOI, its compensation is identical, no matter the control structure, and likewise to the VGT and EGR cases, the average difference is used to calculate the correction factor (last column).
Figure 9.
Example of calculation of the dynamic compensation (DC) factor, for the 6 s ramp. First row: comparison between reference and optimal trajectories. Second row: difference (blue line) and ratio (black line) between optimal and reference trajectories. Compensation factors are derived by using either the average (green line) or the final value (red line) of the respective compensation vectors. Third row: comparison between optimal solutions and dynamically compensated reference control inputs.
Figure 9.
Example of calculation of the dynamic compensation (DC) factor, for the 6 s ramp. First row: comparison between reference and optimal trajectories. Second row: difference (blue line) and ratio (black line) between optimal and reference trajectories. Compensation factors are derived by using either the average (green line) or the final value (red line) of the respective compensation vectors. Third row: comparison between optimal solutions and dynamically compensated reference control inputs.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}