Electronic Power Transformer Control Strategy in Wind Energy Conversion Systems for Low Voltage Ride-through Capability Enhancement of Directly Driven Wind Turbines with Permanent Magnet Synchronous Generators (D-PMSGs)


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
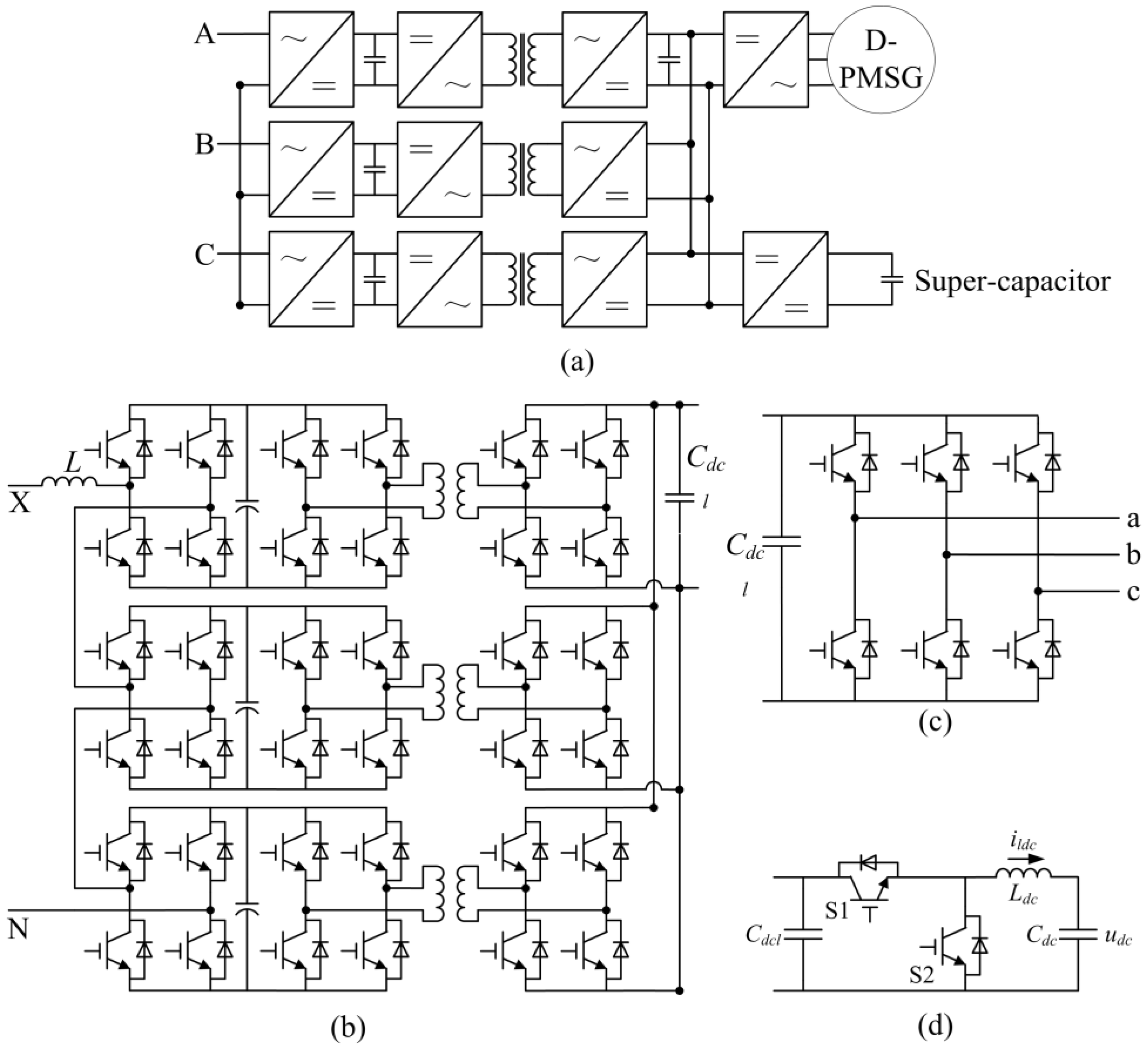
2. System Description and System Model
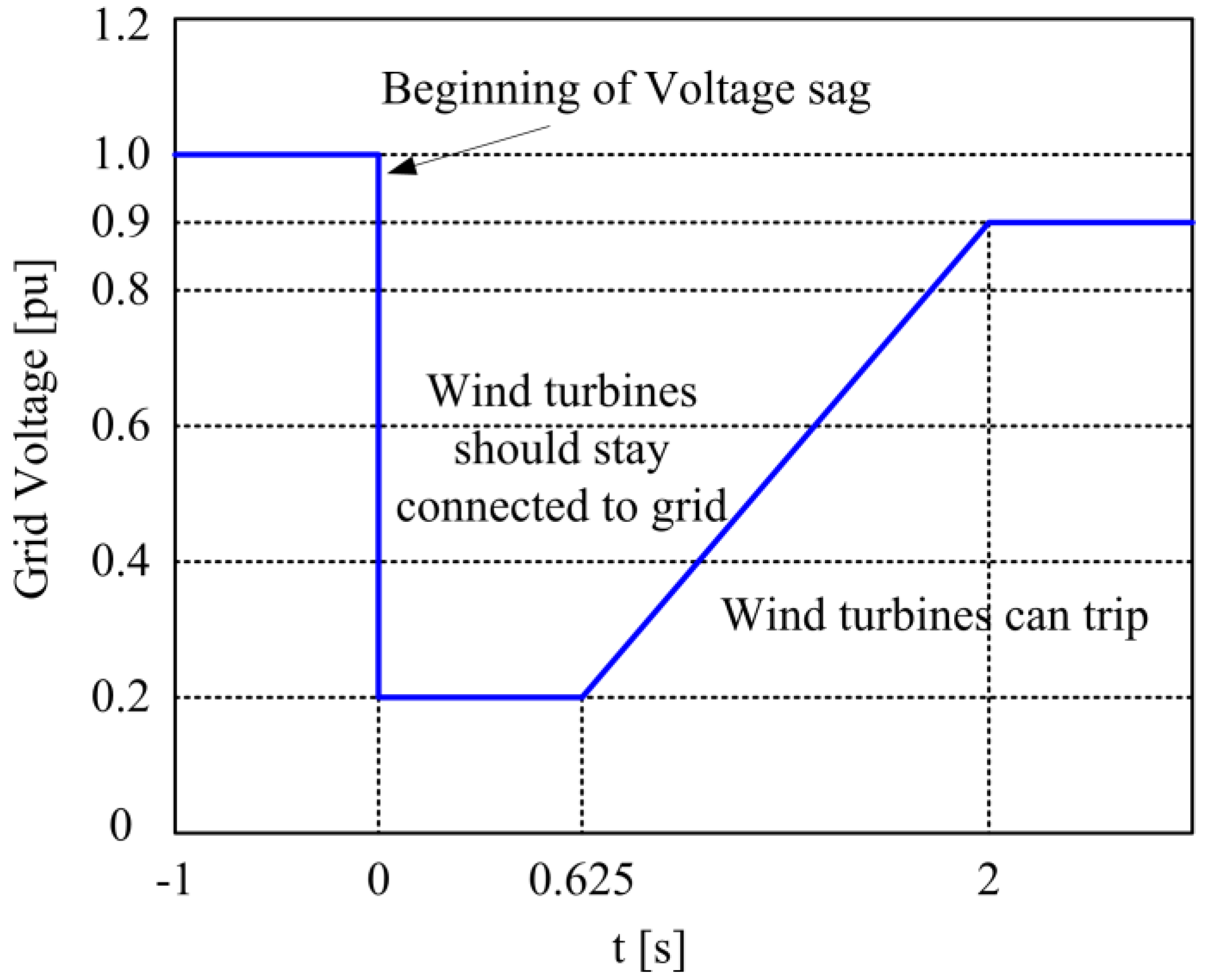
2.1. Low Voltage Ride through Requirement
2.2. Mechanical Drive Train Model
2.3. PMSG Model
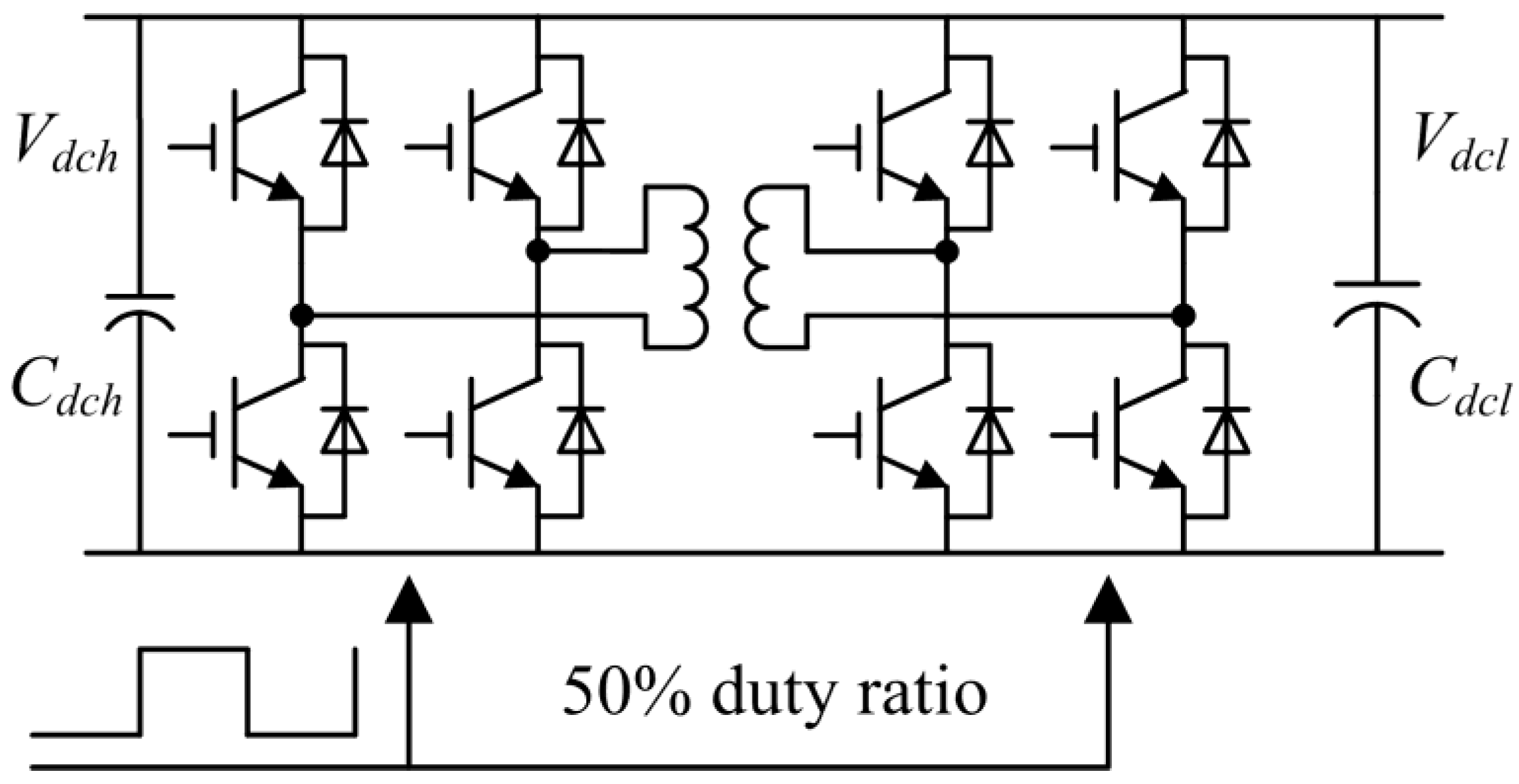
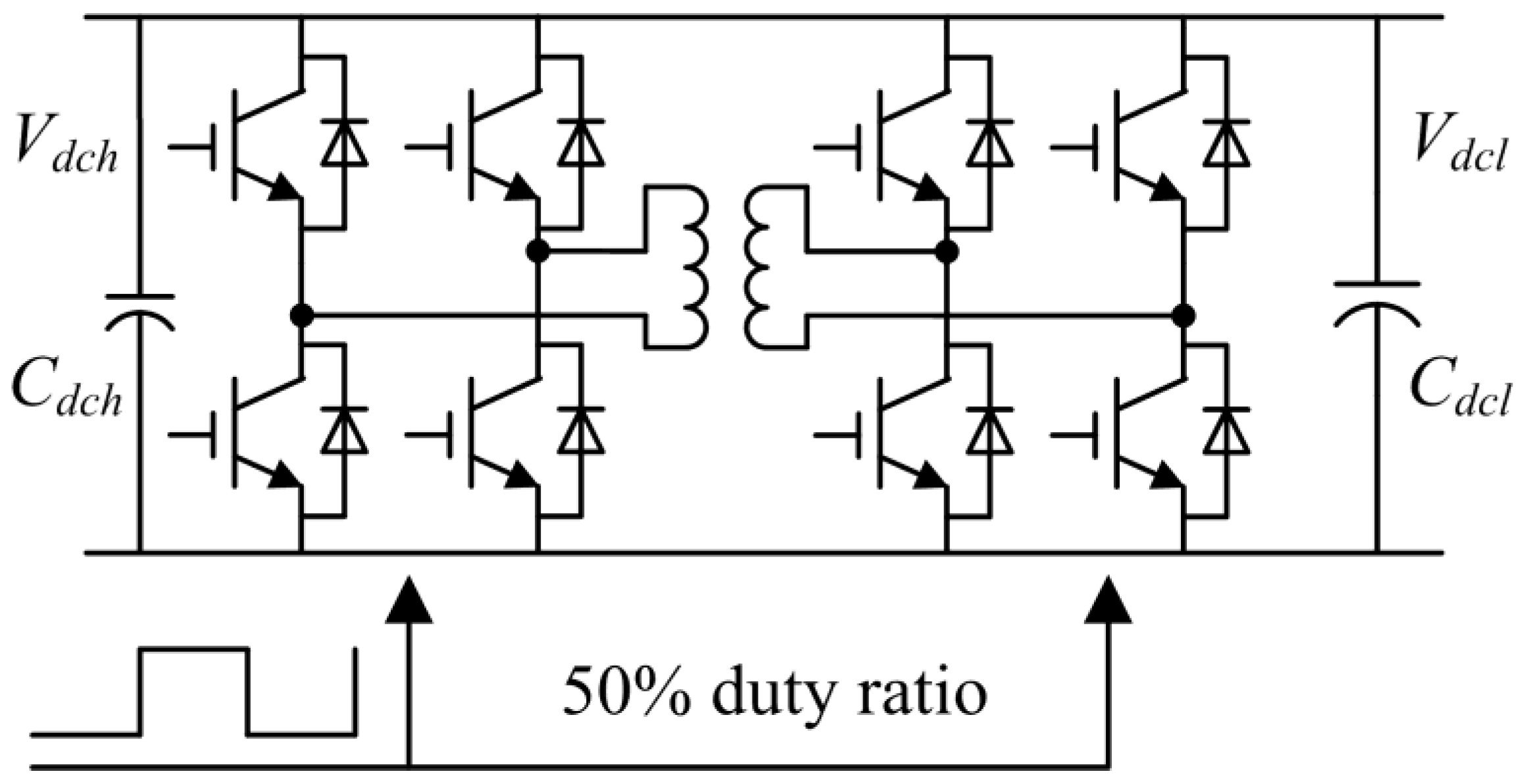
2.4. The Isolation Stage Model
2.5. Grid Side VSC Model
2.6. DC/DC Converter Model
3. Control Strategy of the System
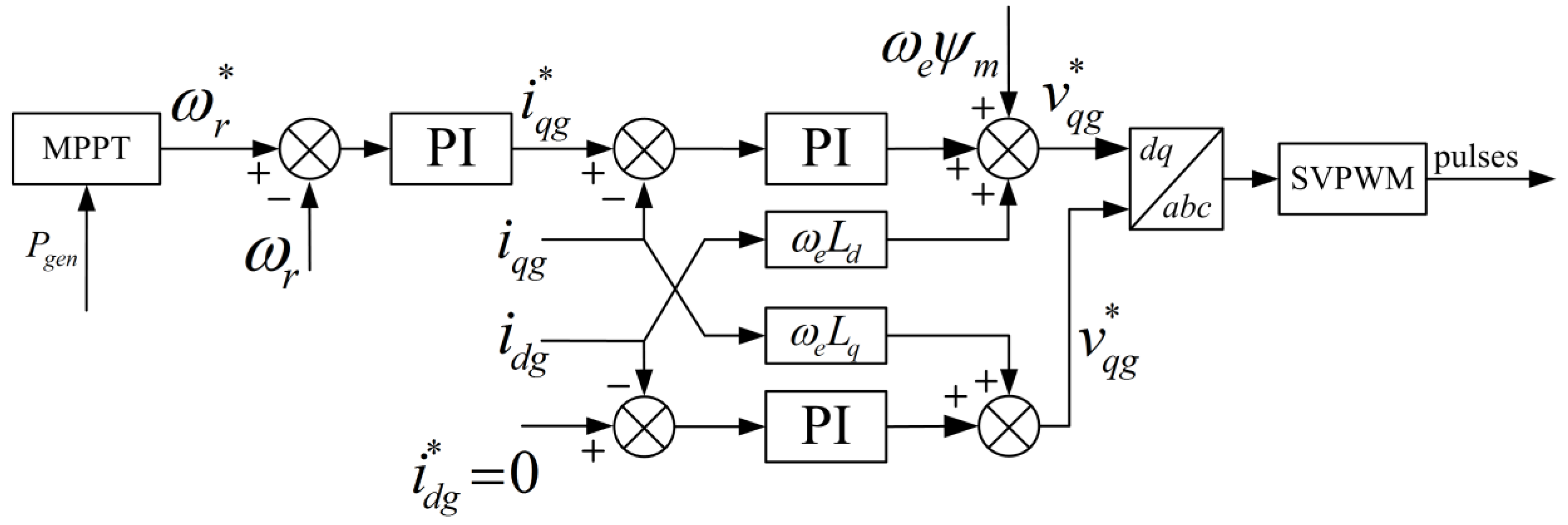
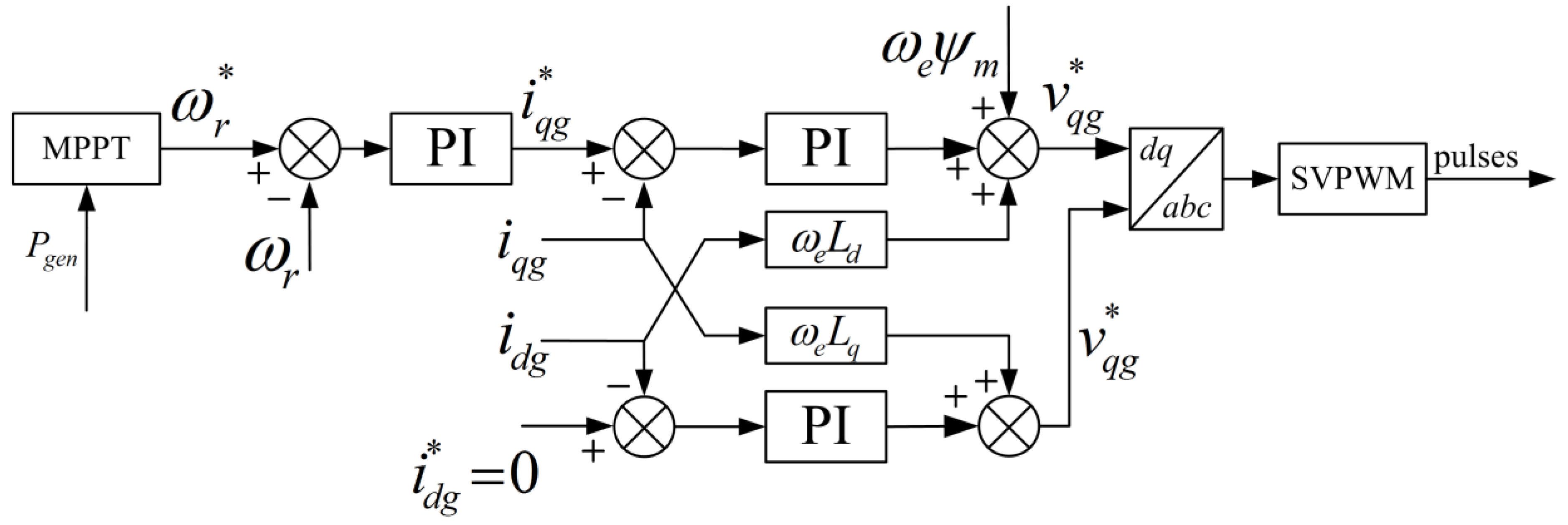
3.1. Control Strategy of the Generator Side Converter
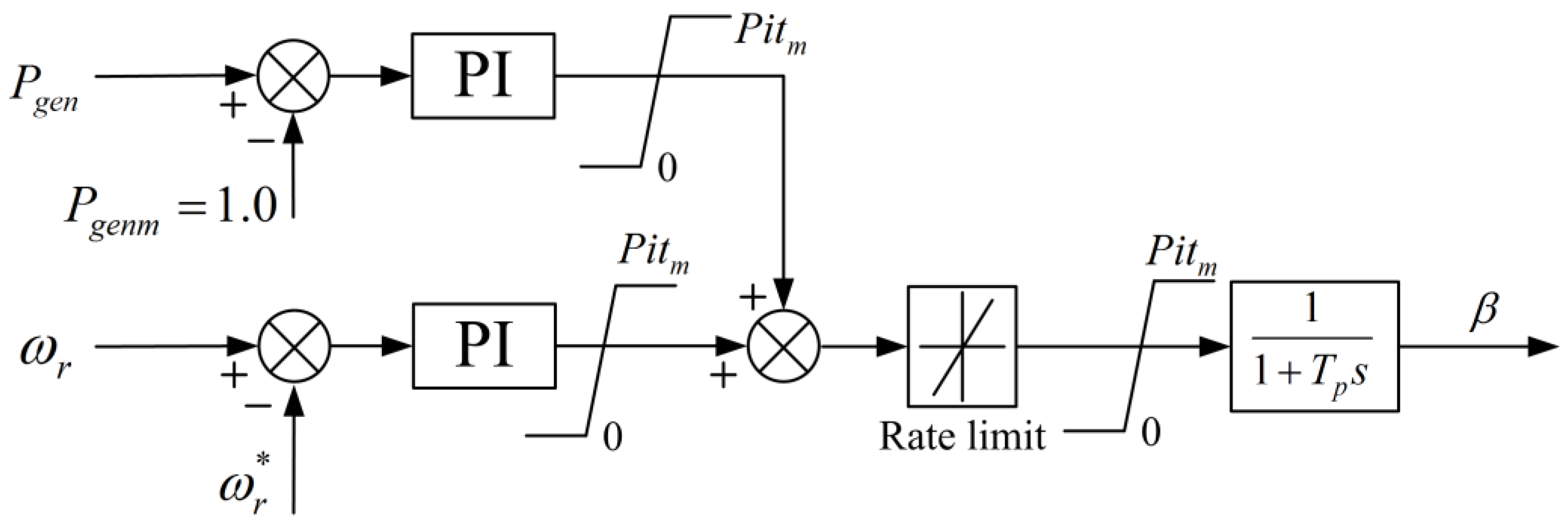
3.2. Wind Turbine Pitch Angle Controller
3.3. Control Strategy of the Isolation Stage
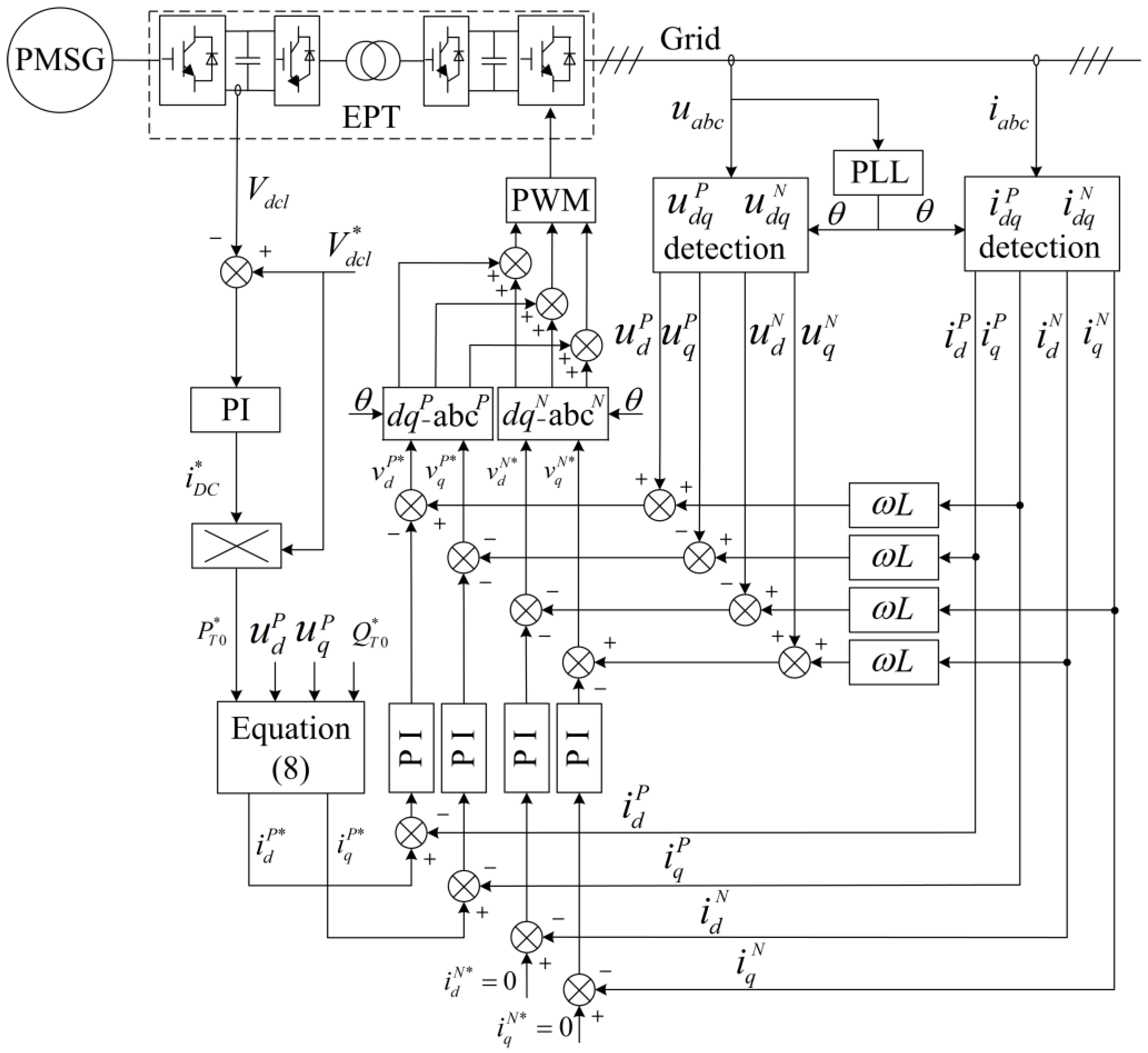
3.4. Control Strategy of the Grid Side Converter
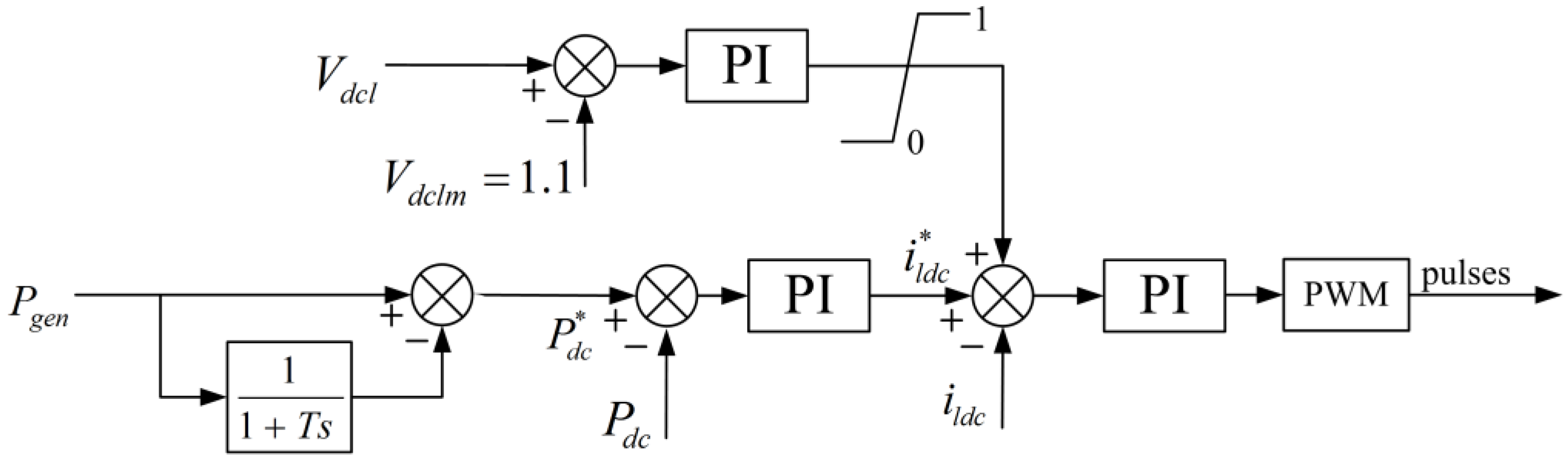
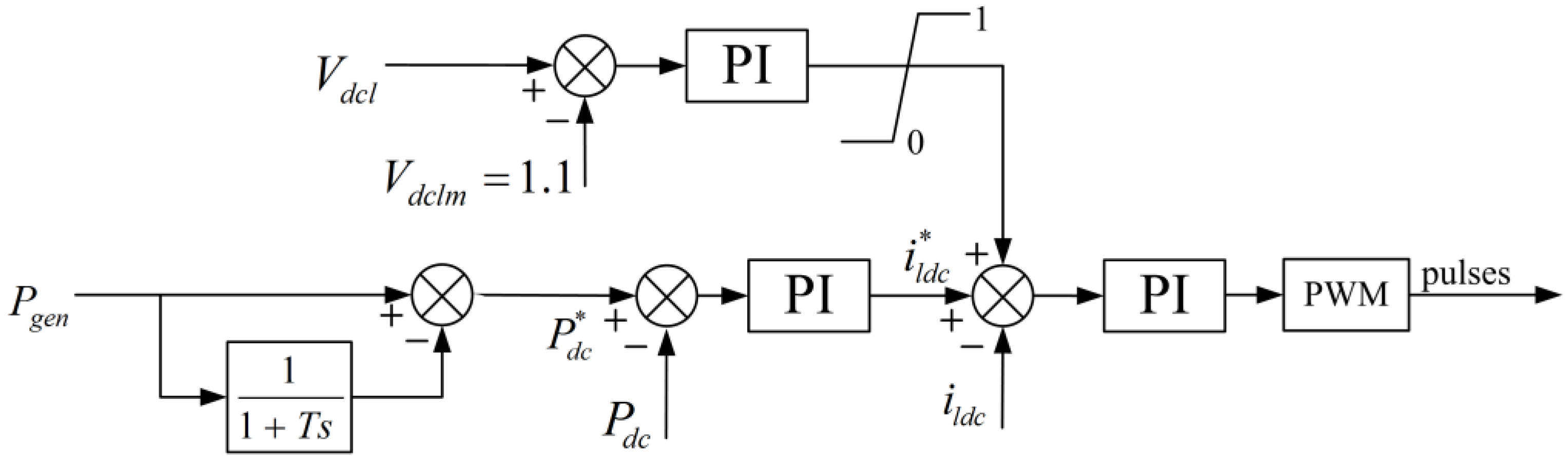
3.5. Control Strategy of the Energy Sorage System

4. Simulation Results
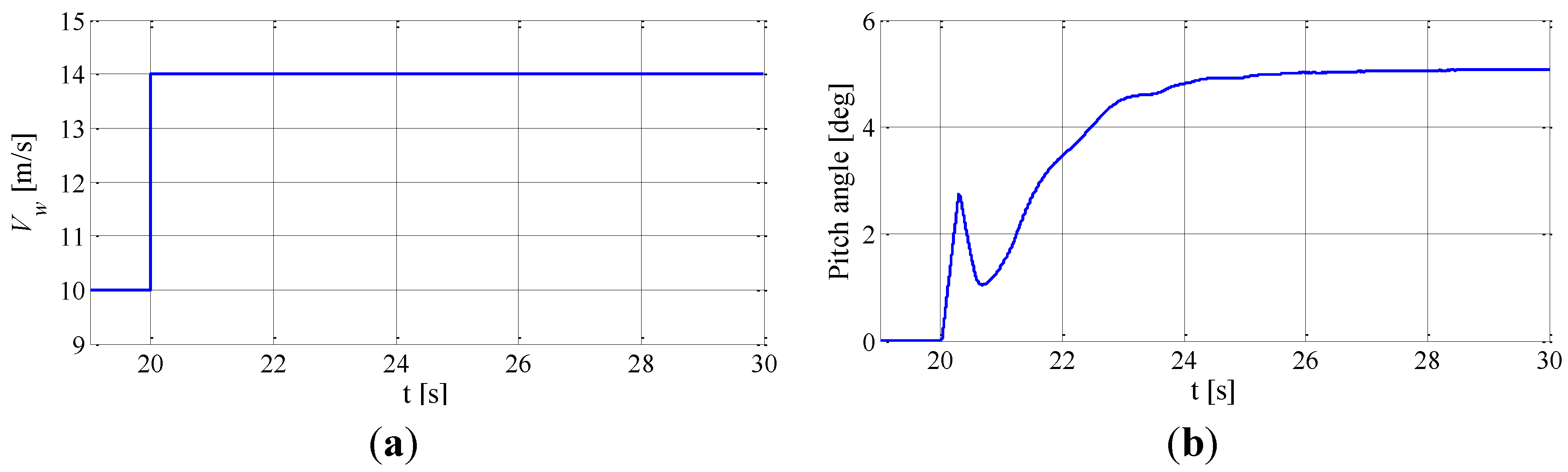
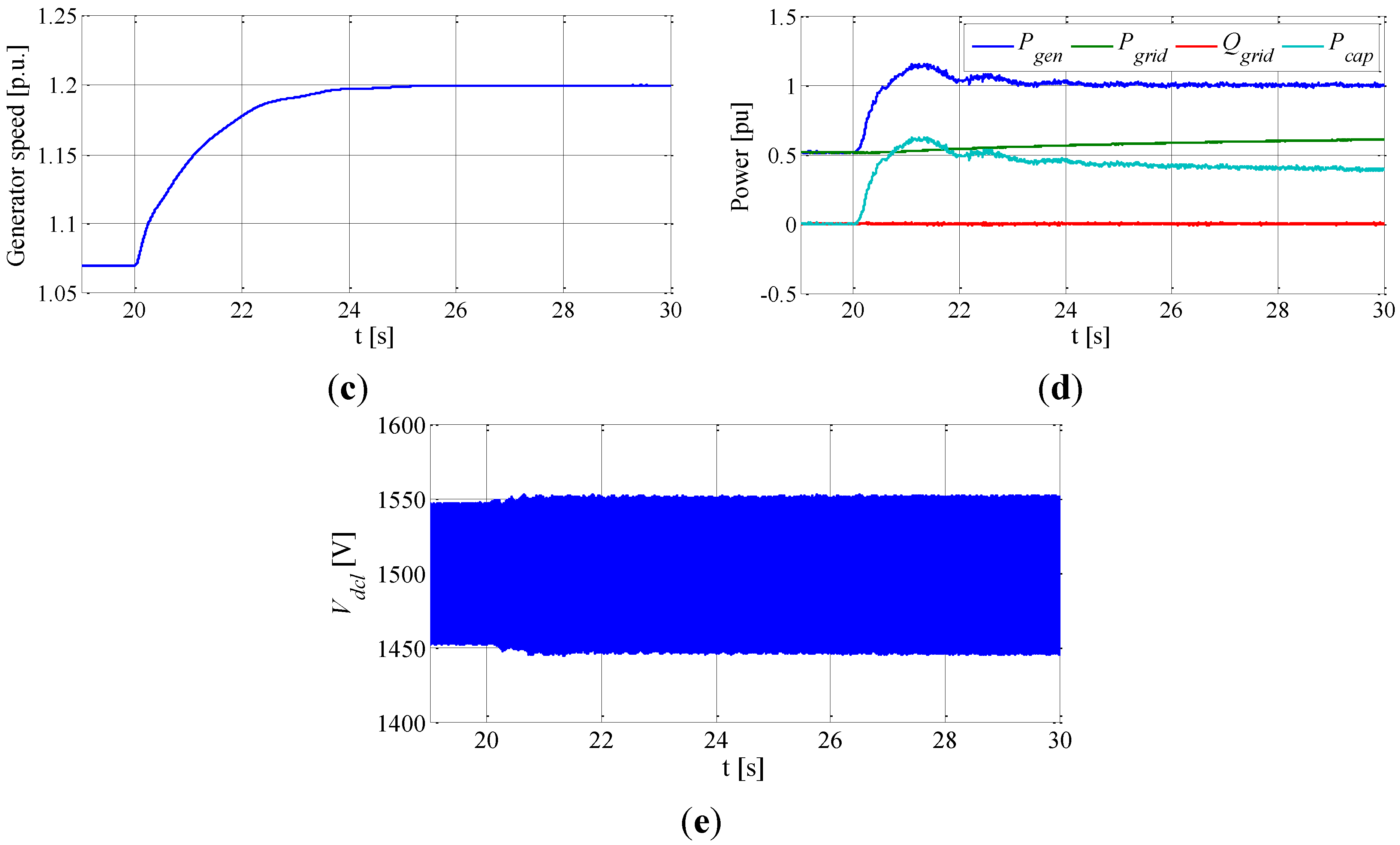
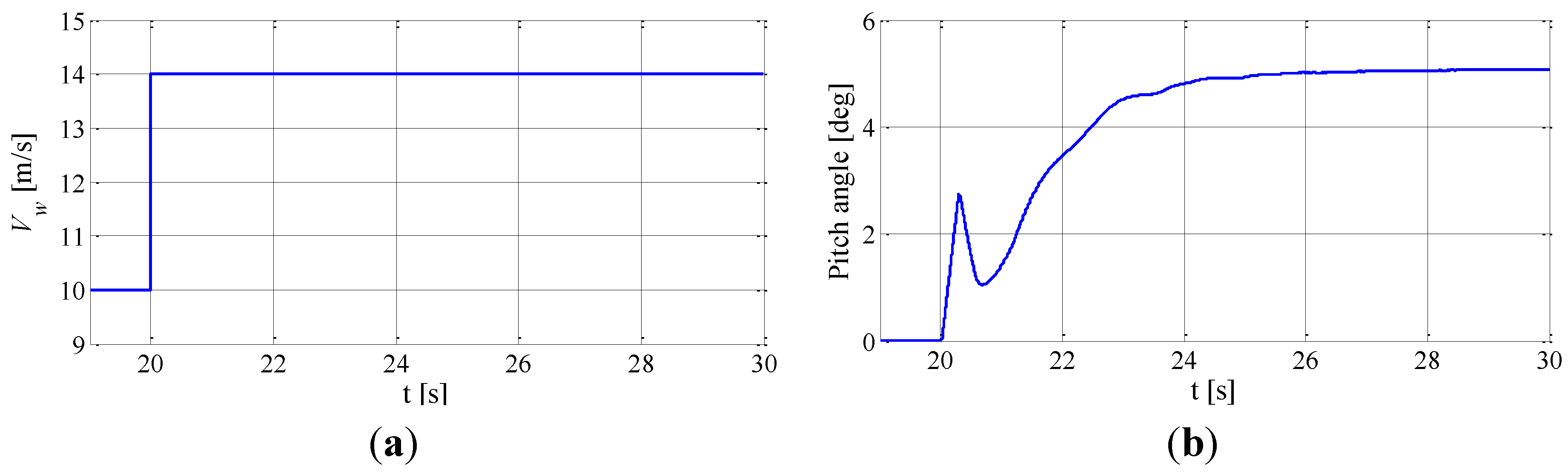
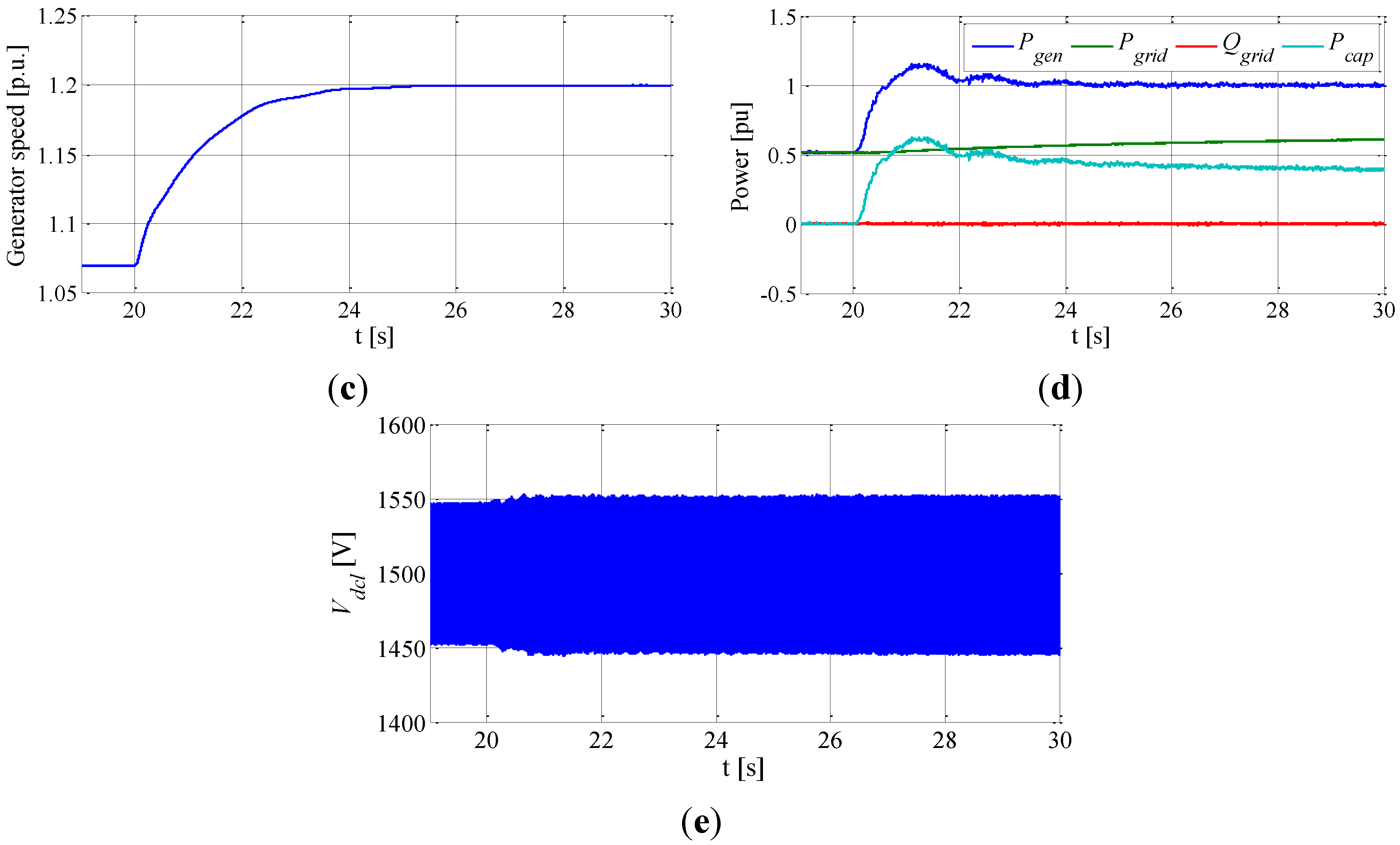
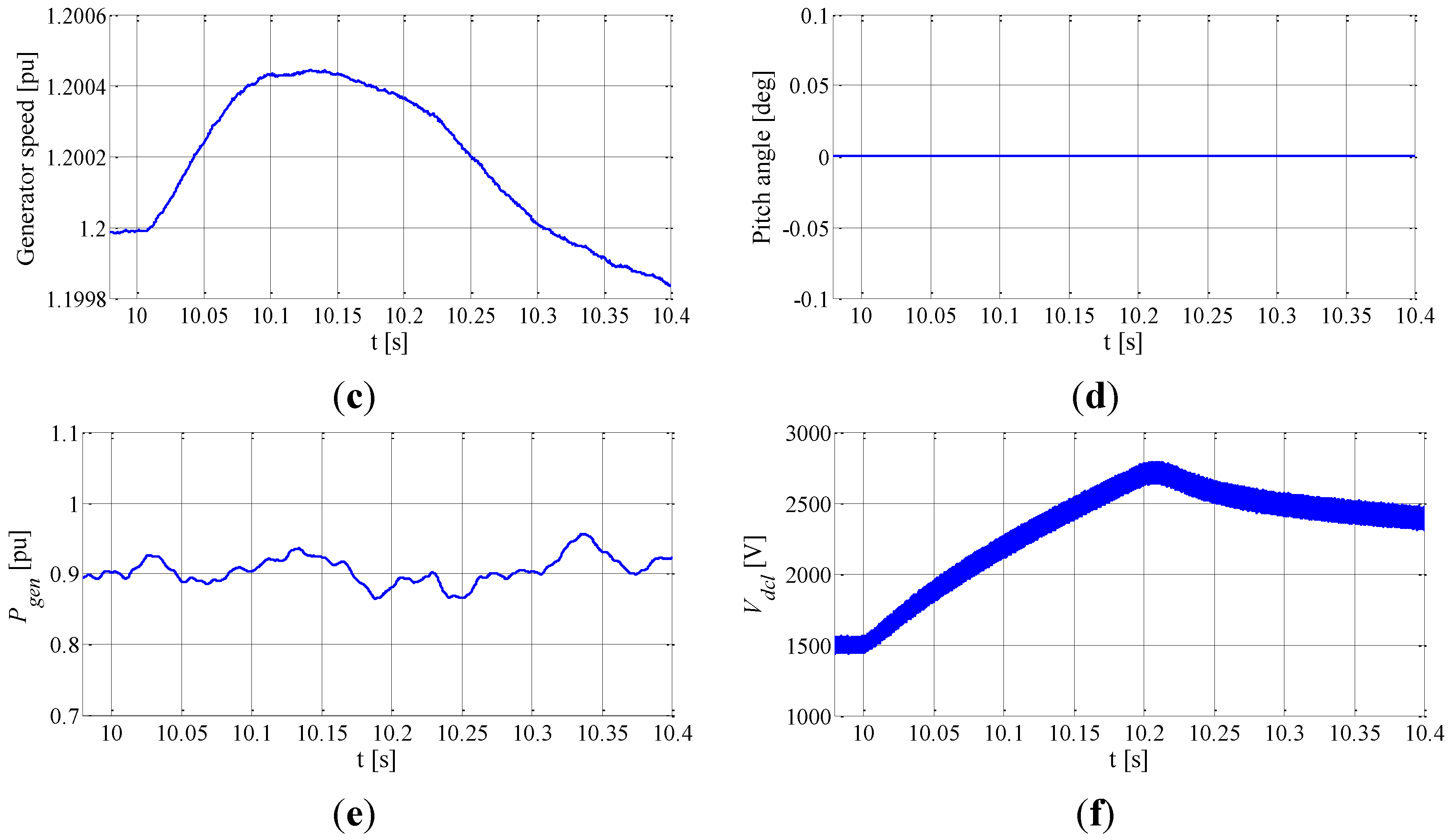
4.1. Response to Wind Speed Step up
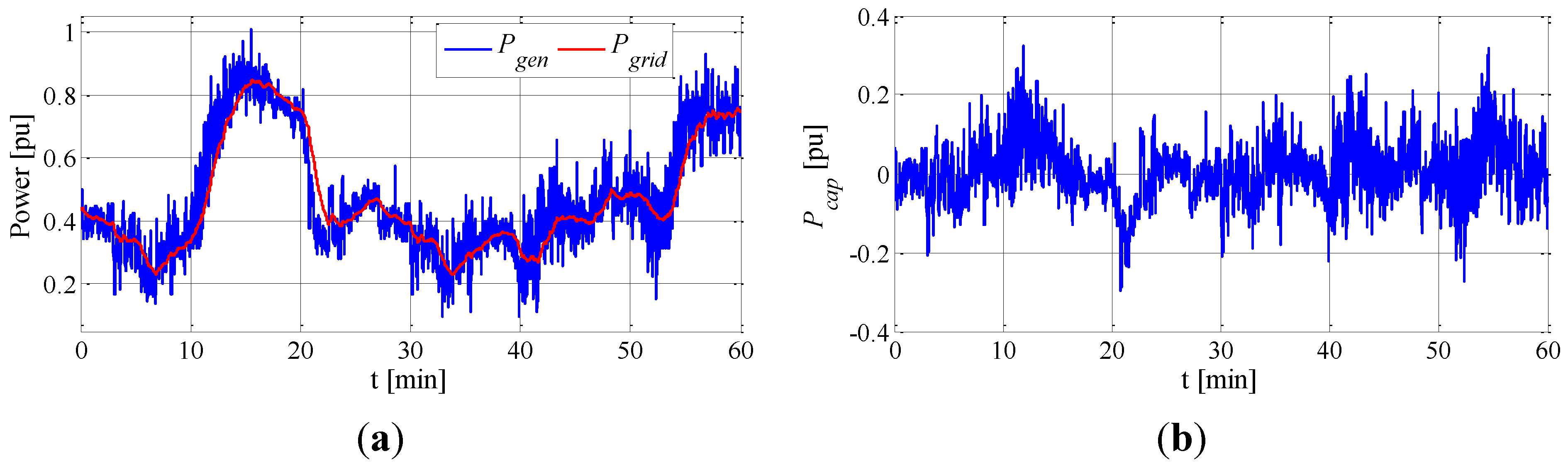
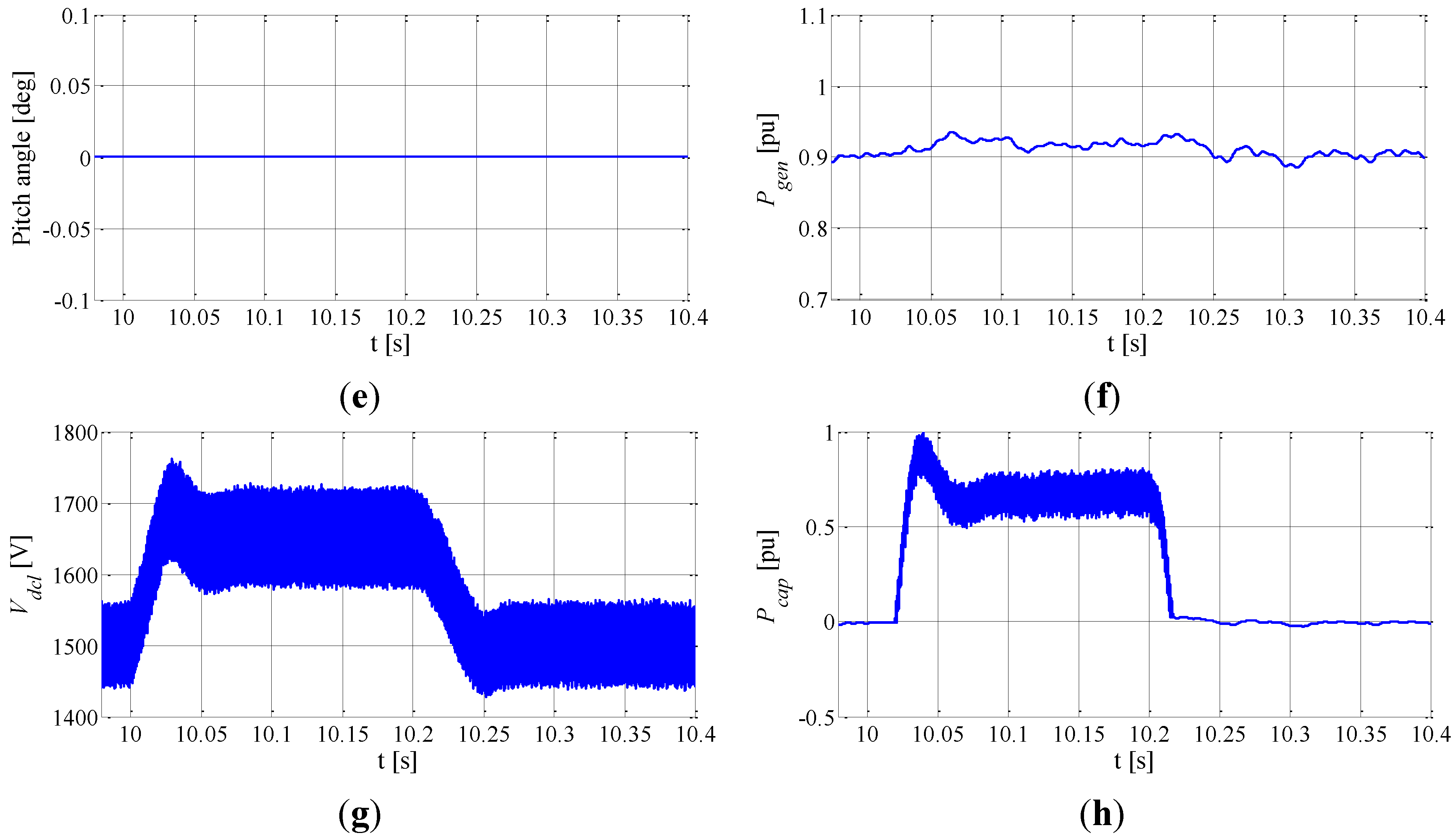
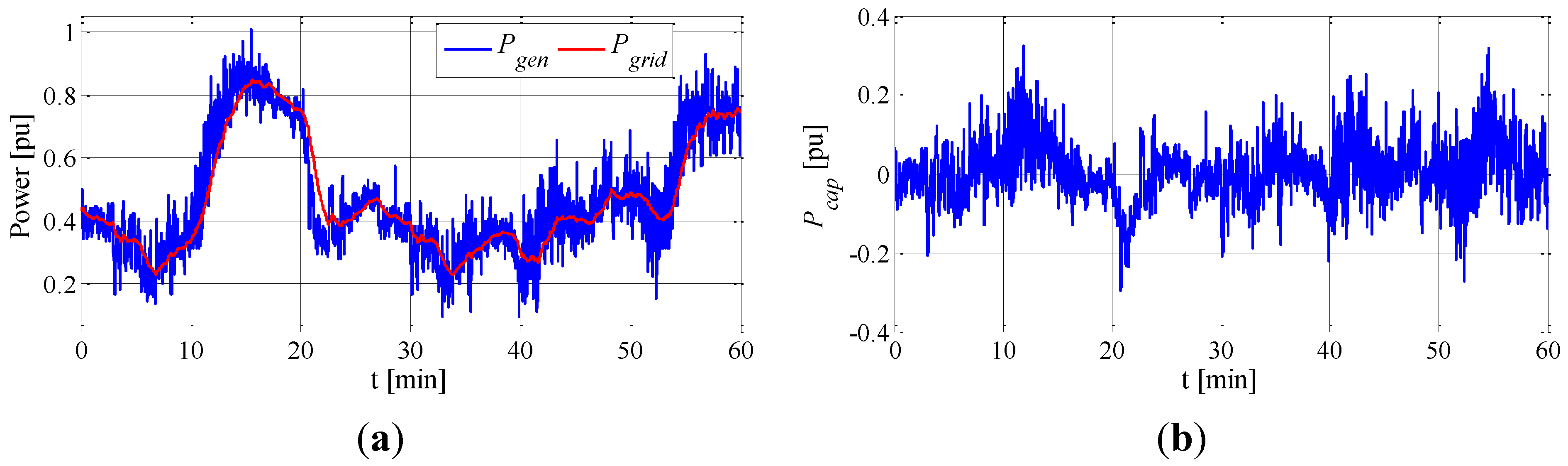
4.2. Simulation Results under Normal Conditions
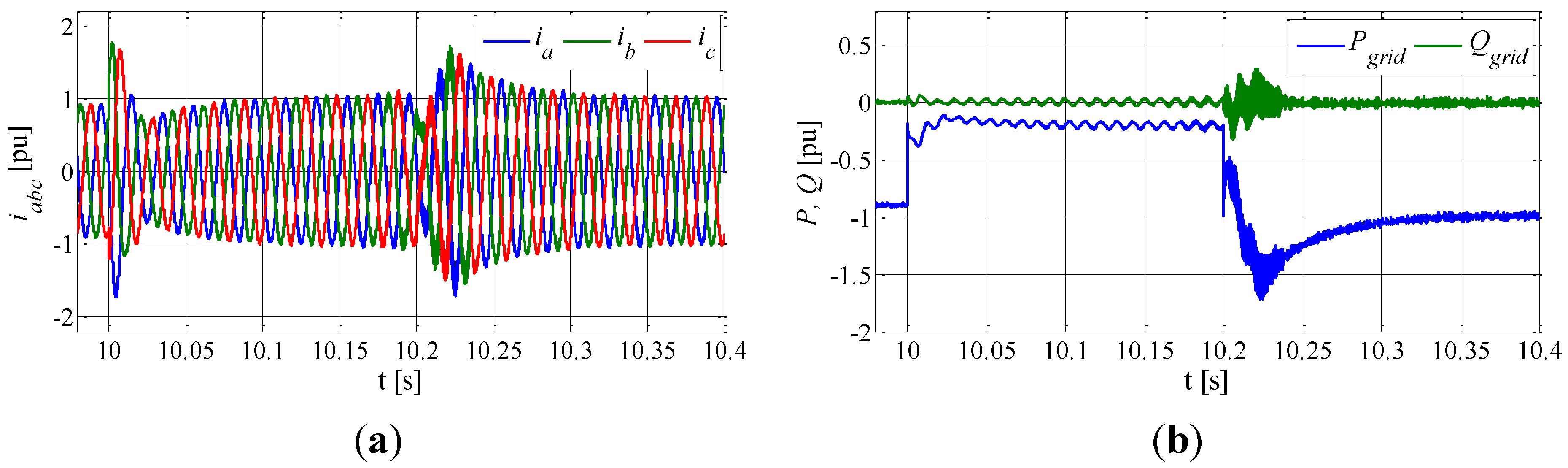
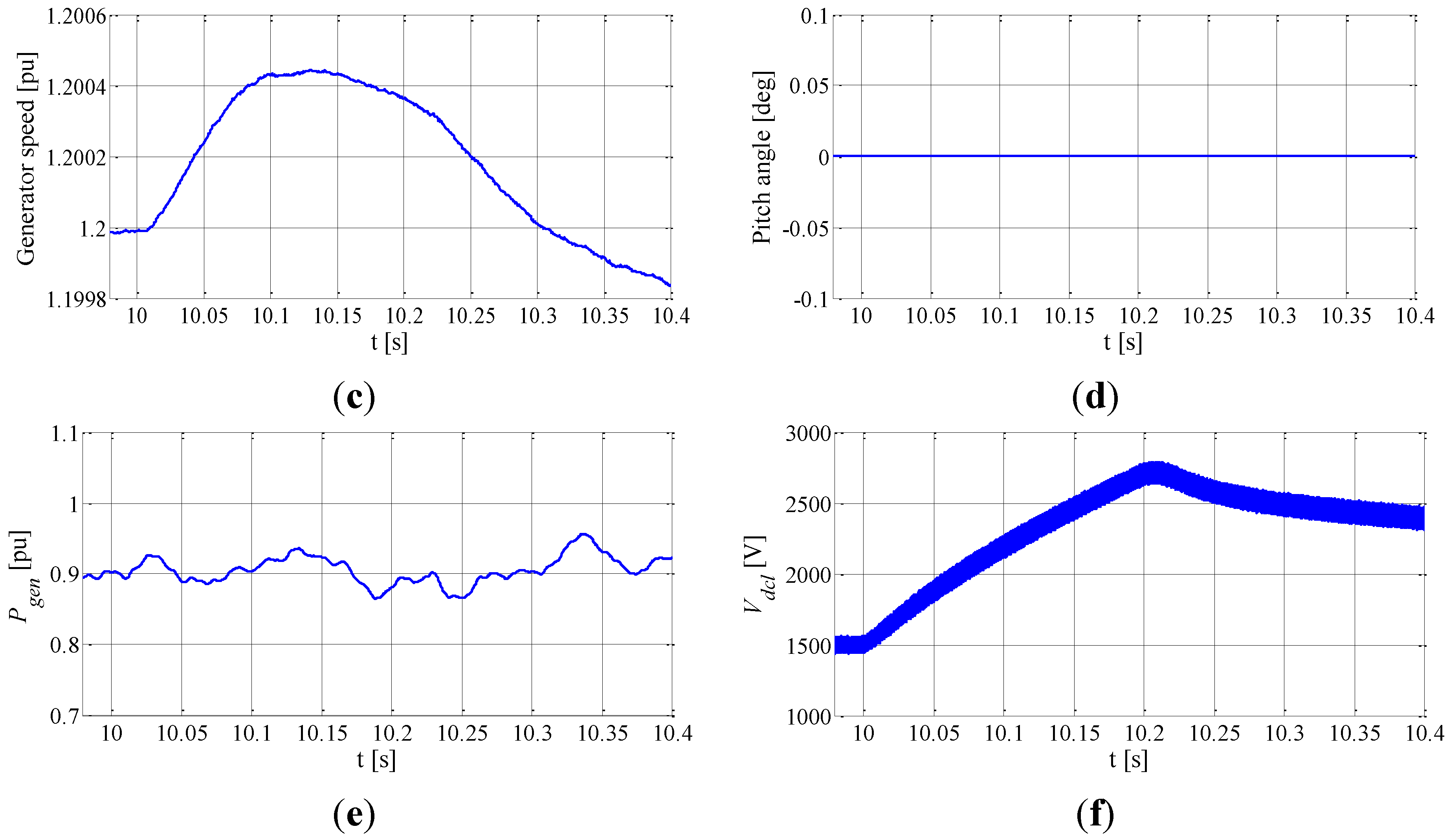
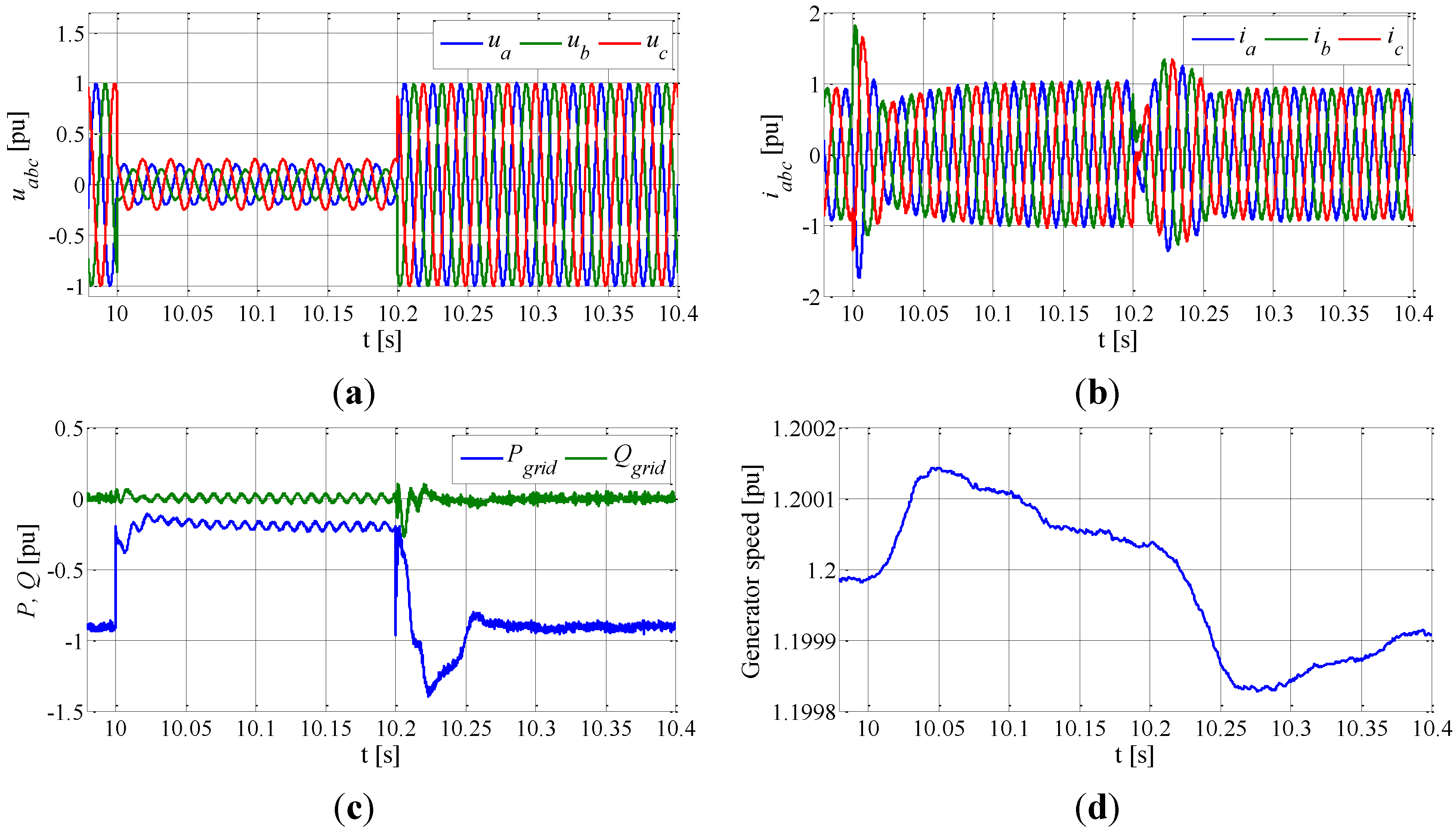
4.3. Simulation Results under Unbalanced Grid Voltage Conditions
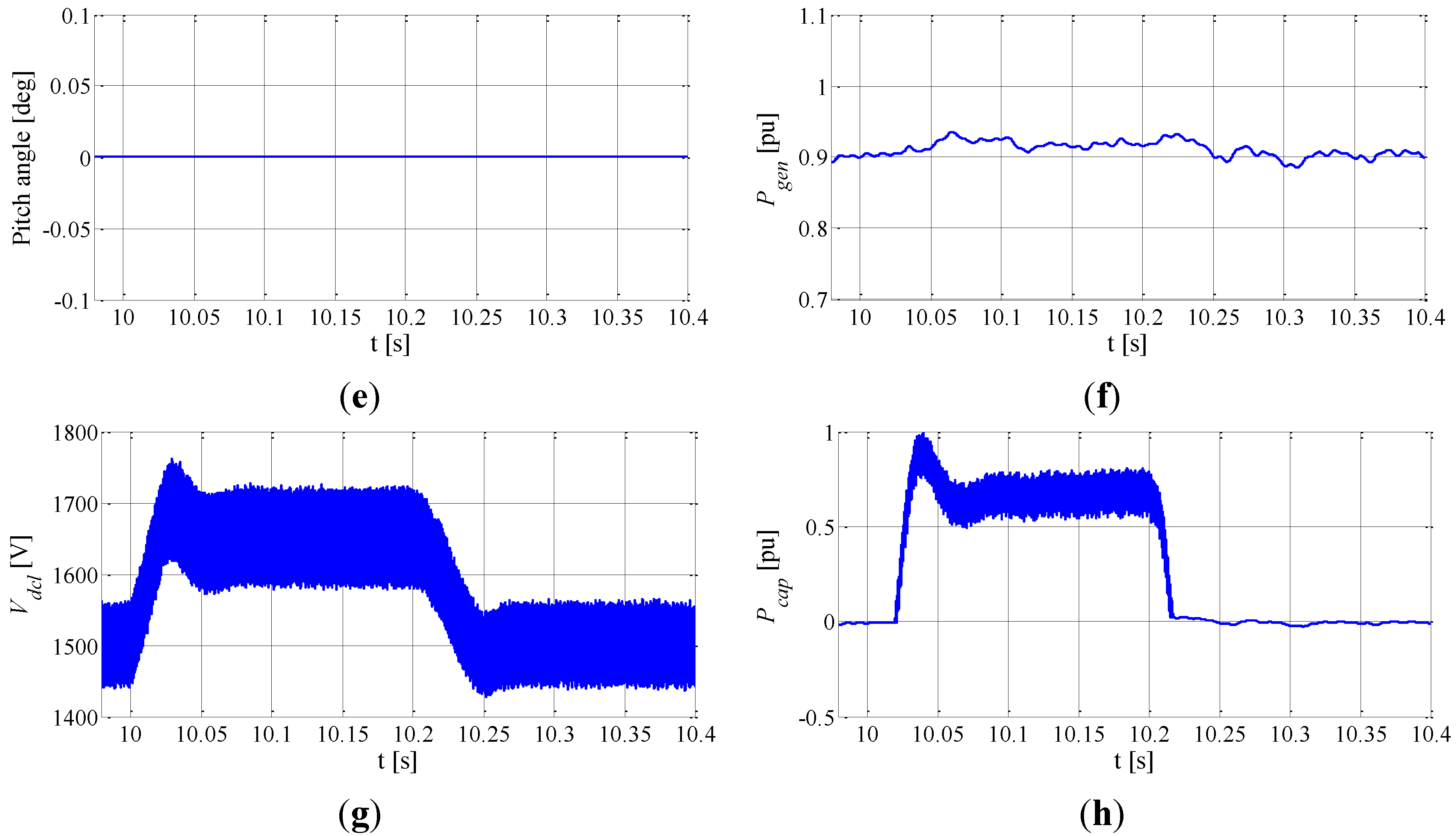
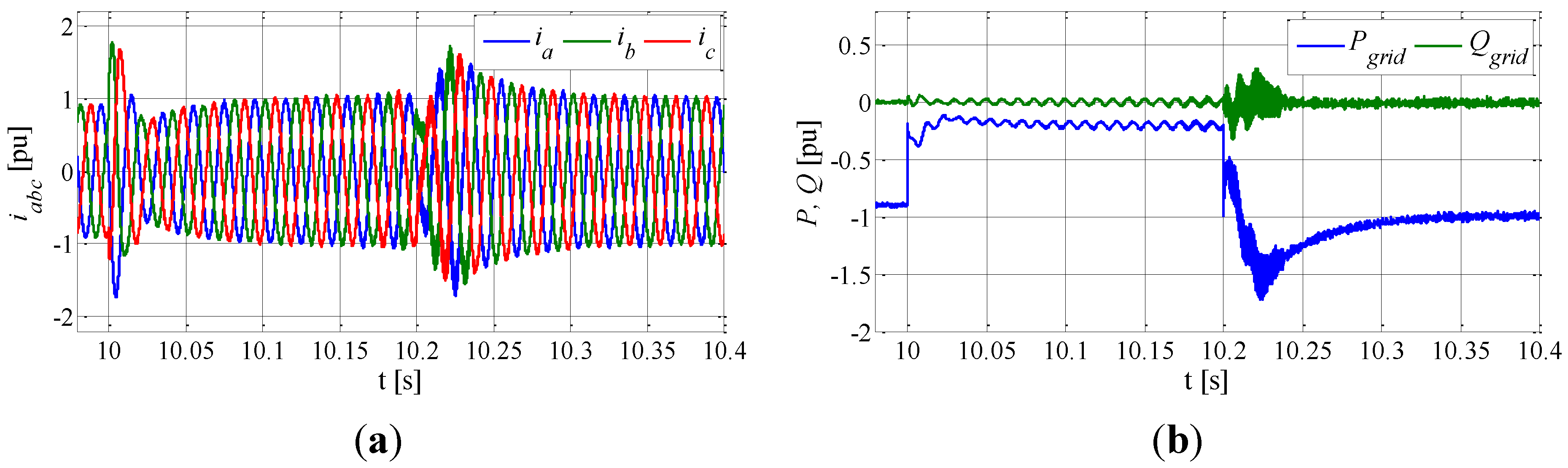
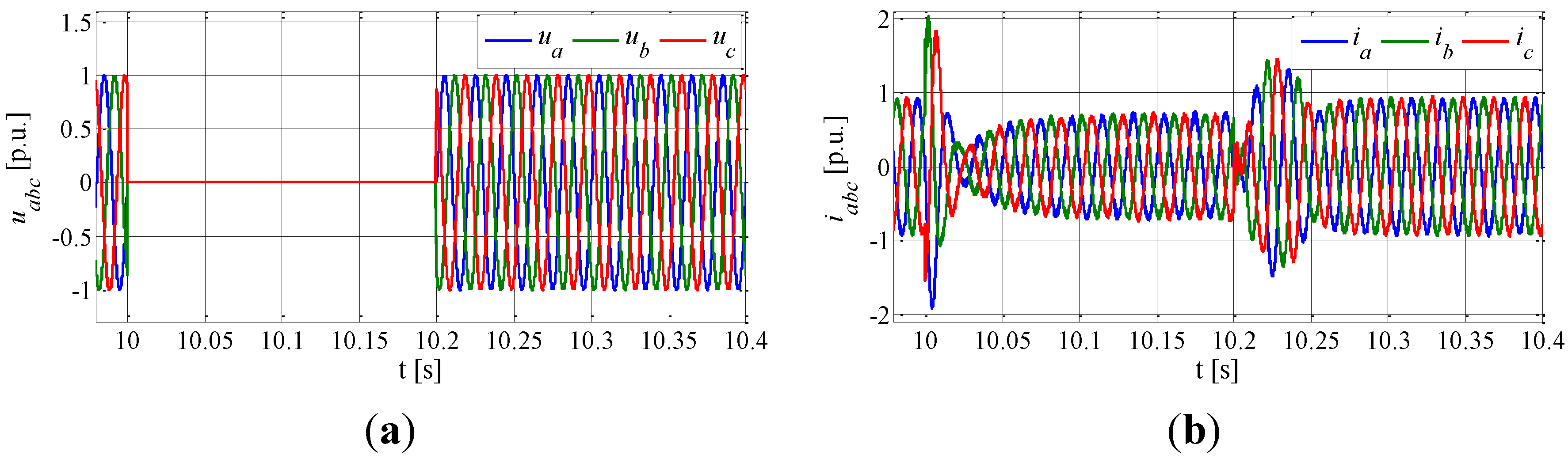
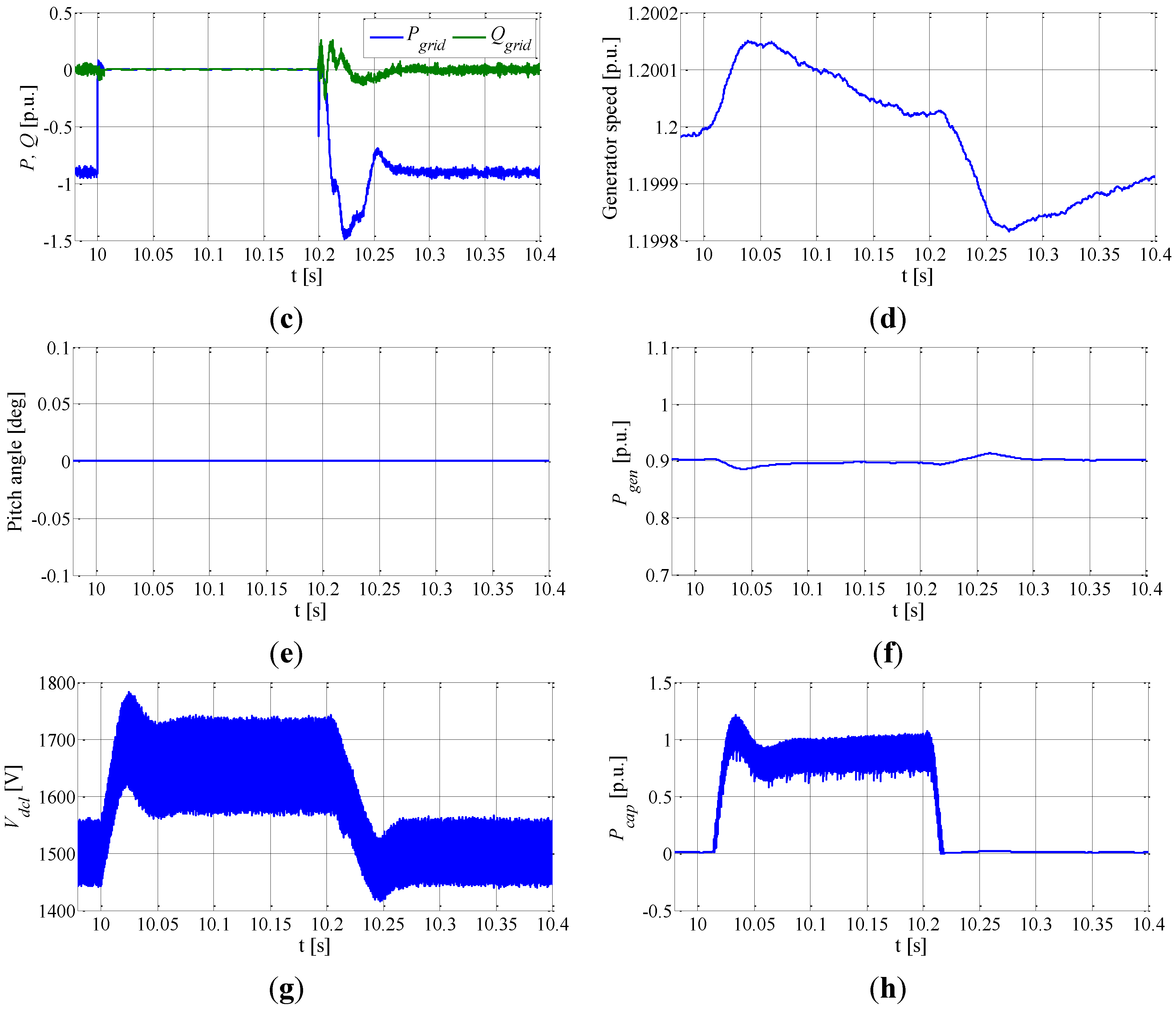
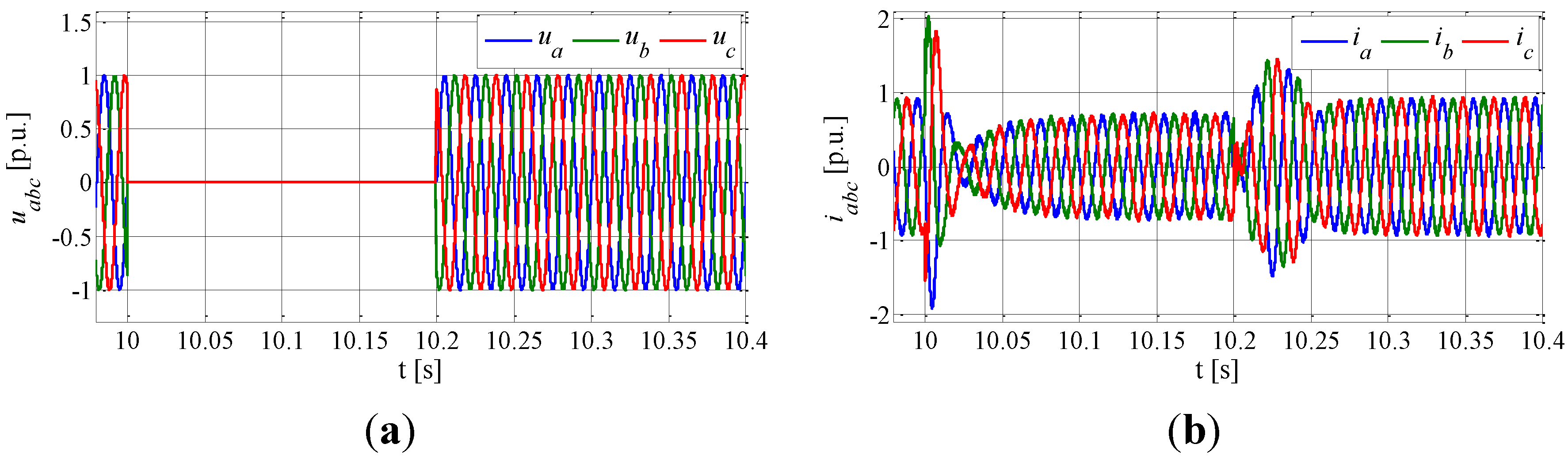
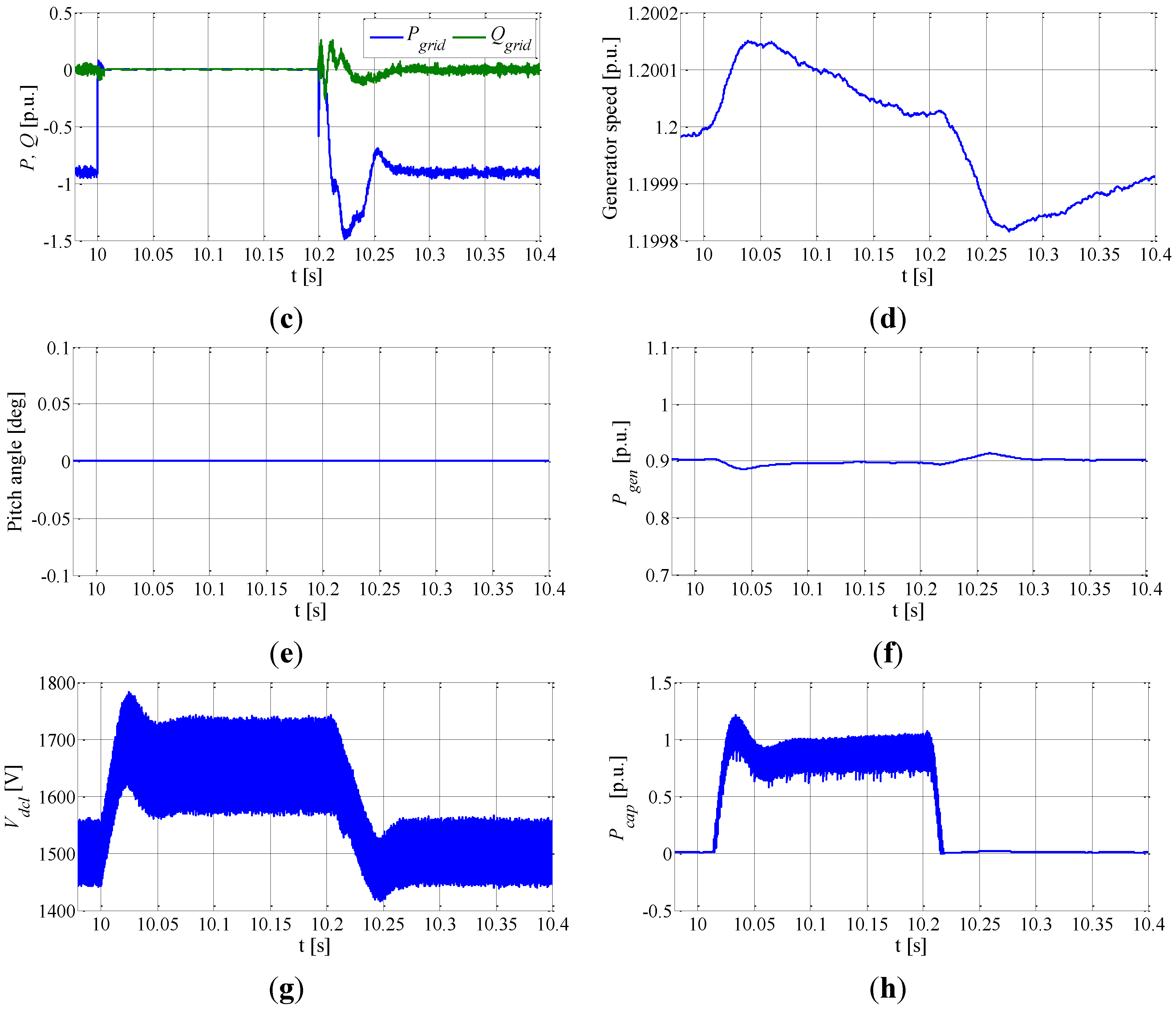
4.4. Simulation Results under Three Phase Ground Fault Conditions
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galvan, E.; Guisado, R.P.; Prats, A.M.; Leon, J.I.; Moreno-Alfonso, N. Power-electronic systems for the grid integration of renewable energy sources: A survey. Ind. Electron. IEEE Trans. 2006, 53, 1002–1016. [Google Scholar]
- Fried, L. Global Wind Statistics 2012; Global Wind Energy Council (GWEC): Brussels, Belgium, 2013. [Google Scholar]
- Li, H.; Chen, Z. Overview of different wind generator systems and their comparisons. IET Renew. Power Gener. 2008, 2, 123–138. [Google Scholar] [CrossRef]
- Zhang, K.; Duan, Y.; Wu, J.; Qiu, J.; Lu, J.; Fan, S.; Huang, H.; Mao, C. Low voltage ride through control strategy of directly driven wind turbine with energy storage system. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 24–29 July 2011; pp. 1–7.
- Mi, Z.; Chen, Y.; Liu, L.; Yu, Y. Dynamic performance improvement of wind farm with doubly fed induction generators using STATCOM. In Proceedings of the 2010 International Conference on Power System Technology (POWERCON), Hangzhou, China, 24–28 October 2010; pp. 1–6.
- Obando-Montaño, A.F.; Carrillo, C.; Cidrás, J.; Díaz-Dorado, E. A STATCOM with supercapacitors for low-voltage ride-through in fixed-speed wind turbines. Energies 2014, 7, 5922–5952. [Google Scholar] [CrossRef] [Green Version]
- Han, C.; Huang, A.Q.; Baran, M.E.; Bhattacharya, S.; Litzenberger, W.; Anderson, L.; Johnson, A.L.; Edris, A.A. STATCOM impact study on the integration of a large wind farm into a weak loop power system. Energy Convers. IEEE Trans. 2008, 23, 226–233. [Google Scholar] [CrossRef]
- Conroy, J.F.; Watson, R. Low-voltage ride-through of a full converter wind turbine with permanent magnet generator. IET Renew. Power Gener. 2007, 1, 182–189. [Google Scholar] [CrossRef]
- Wang, D.; Mao, C.; Lu, J. Modelling of electronic power transformer and its application to power system. IET Gener. Transm. Distrib. 2007, 1, 887–895. [Google Scholar] [CrossRef]
- Manjrekar, M.D.; Kieferndorf, R.; Venkataramanan, G. Power electronic transformers for utility applications. In Proceedings of the Conference Record of the 2000 IEEE Industry Applications, Rome, Italy, 8–12 October 2000.
- Ronan, E.R.; Sudhoff, S.D.; Glover, S.R.; Galloway, D.L. A power electronic-based distribution transformer. Power Deliv. IEEE Trans. 2002, 17, 537–543. [Google Scholar]
- Van der Merwe, J.W. The solid-state transformer concept: A new era in power distribution. In Proceedings of the 2009 AFRICON, Nairobi, Kenya, 23–25 September 2009.
- Wang, D.; Mao, C.; Lu, J.; Liu, H. Auto-balancing transformer based on power electronics. Electr. Power Syst. Res. 2010, 80, 28–36. [Google Scholar] [CrossRef]
- Wang, D.; Mao, C.; Lu, J.; Fan, S.; Peng, F. Theory and application of distribution electronic power transformer. Electr. Power Syst. Res. 2007, 77, 219–226. [Google Scholar] [CrossRef]
- Sang, Z.; Mao, C.; Lu, J.; Wang, D. Analysis and simulation of fault characteristics of power switch failures in distribution electronic power transformers. Energies 2013, 6, 4246–4268. [Google Scholar] [CrossRef]
- Liu, H.; Mao, C.; Lu, J.; Wang, D. Electronic power transformer with supercapacitors storage energy system. Electr. Power Syst. Res. 2009, 79, 1200–1208. [Google Scholar] [CrossRef]
- Liu, H.; Mao, C.; Lu, J.; Wang, D. Optimal regulator-based control of electronic power transformer for distribution systems. Electr. Power Syst. Res. 2009, 79, 863–870. [Google Scholar] [CrossRef]
- Brando, G.; Dannier, A.; Rizzo, R. Power electronic transformer application to grid connected photovoltaic systems. In Proceedings of the 2009 International Conference on Clean Electrical Power, Capri, Italy, 9–11 June 2009.
- Gupta, R.K.; Castelino, G.F.; Mohapatra, K.K.; Mohan, N. A novel integrated three-phase, switched multi-winding power electronic transformer converter for wind power generation system. In Proceedings of the 35th Annual Conference of IEEE Industrial Electronics 2009, Porto, Portugal, 3–5 November 2009.
- She, X.; Huang, A.Q.; Wang, F.; Burgos, R. Wind energy system with integrated functions of active power transfer, reactive power compensation, and voltage conversion. Ind. Electron. IEEE Trans. 2013, 60, 4512–4524. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, J.; Wang, Z.; Wang, S.; Ouyang, L. A new permanent magnet synchronous wind-power generation grid-connected system. Power Syst. Prot. Control 2013, 41, 141–148. [Google Scholar]
- Zhang, M.; Liu, J.; Jin, X. Research on the SVPWM solid state transformer applied in smart micro-grid. Trans China Electrotech. Soc. 2012, 27, 90–97. (In Chinese) [Google Scholar]
- She, X.; Huang, A.Q.; Lukic, S.; Baran, M.E. On integration of solid-state transformer with zonal DC microgrid. Smart Grid IEEE Trans. 2012, 3, 975–985. [Google Scholar] [CrossRef]
- Muyeen, S.M.; Ali, M.H.; Takahashi, R.; Murata, T.; Tamura, J.; Tomaki, Y.; Sakahara, A.; Sasano, E. Comparative study on transient stability analysis of wind turbine generator system using different drive train models. Renew. Power Gener. IET 2007, 1, 131–141. [Google Scholar] [CrossRef]
- De Doncker, R.W.A.A.; Divan, D.M.; Kheraluwala, M.H. A three-phase soft-switched high-power-density DC/DC converter for high-power applications. Ind. Appl. IEEE Trans. 1991, 27, 63–73. [Google Scholar]
- Song, H.; Nam, K. Dual current control scheme for PWM converter under unbalanced input voltage conditions. Ind. Electron. IEEE Trans. 1999, 46, 953–959. [Google Scholar] [CrossRef]
- Chinchilla, M.; Arnaltes, S.; Burgos, J.C. Control of permanent-magnet generators applied to variable-speed wind-energy systems connected to the grid. Energy Convers. IEEE Trans. 2006, 21, 130–135. [Google Scholar] [CrossRef]
- Miller, N.W.; Price, W.W.; Sanchez-Gasca, J.J. GE-Power Systems Energy Consulting: Dynamic Modeling of GE 1.5 and 3.6 Wind Turbine-Generators; General Electric International, Inc.: Schenectady, NY, USA, 2003. [Google Scholar]
- Clark, K.; Miller, N.W.; Sanchez-Gasca, J.J. General Electric International Technical Report: Modeling of GE Wind Turbine-Generators for Grid Studies; General Electric International, Inc.: Schenectady, NY, USA, 2010. [Google Scholar]
- Enjeti, P.N.; Choudhury, S.A. A new control strategy to improve the performance of a PWM AC to DC converter under unbalanced operating conditions. Power Electron. IEEE Trans. 1993, 8, 493–500. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Mao, C.; Lu, J.; Wang, D. Electronic Power Transformer Control Strategy in Wind Energy Conversion Systems for Low Voltage Ride-through Capability Enhancement of Directly Driven Wind Turbines with Permanent Magnet Synchronous Generators (D-PMSGs). Energies 2014, 7, 7330-7347. https://doi.org/10.3390/en7117330
Huang H, Mao C, Lu J, Wang D. Electronic Power Transformer Control Strategy in Wind Energy Conversion Systems for Low Voltage Ride-through Capability Enhancement of Directly Driven Wind Turbines with Permanent Magnet Synchronous Generators (D-PMSGs). Energies. 2014; 7(11):7330-7347. https://doi.org/10.3390/en7117330
Chicago/Turabian StyleHuang, Hui, Chengxiong Mao, Jiming Lu, and Dan Wang. 2014. "Electronic Power Transformer Control Strategy in Wind Energy Conversion Systems for Low Voltage Ride-through Capability Enhancement of Directly Driven Wind Turbines with Permanent Magnet Synchronous Generators (D-PMSGs)" Energies 7, no. 11: 7330-7347. https://doi.org/10.3390/en7117330