1. Introduction
In recent years, the integration of renewable energy sources into power grids may lead to frequency instability and undesired transients [
1,
2,
3,
4]. A central challenge is to regulate the grid’s frequency under high penetration levels of renewable sources. In large interconnected areas, such as the Continental European system, many efforts have been made by ENTSO-E (European Network of Transmission System Operators for Electricity) to deal with stability problems [
5]. In addition, control methods that promote stability are recently being implemented in isolated systems [
6].
In this light, there is a growing need for accurate models that describe the behavior of renewable energy sources, especially photovoltaic (PV) sources and wind turbines. Such models have been recently recognized to be crucial for the planning and operation of modern grids [
7,
8,
9,
10]. Due to this need, several entities like the Western Electricity Coordinating Council (WECC) in the U.S. and the International Electro-technical Commission (IEC) in Europe have been developing generic dynamic models for wind and solar PV. For example, Ellis et al. [
11] reported a generic model for a PV system, which was defined and developed by WECC. In [
12], a report written by the Electric Power Research Institute (EPRI) suggested generic and public models for renewable energy systems. In addition, the work in [
13] investigated the compatibility of IEC and WECC wind turbine models, and the work in [
14] presented models of battery energy storage systems alongside specific applications.
Models for solar PV are typically represented by algebraic and differential equations and have been implemented in commercially available software such as PLSF [
15], PSSE [
16], PowerWorld [
17], and PowerFactory [
18]. In most cases, including this work, these models are based on the fundamental positive-sequence in the time domain [
19,
20], but in some cases, electromagnetic transient simulations (EMT) are also used [
21,
22].
Since WECC models for renewable plants have become commonly used in the last few years, several works focus on validation of these models. For example, some of the works are dedicated to wind turbine power plants such as [
23], which showed how to use WECC models of wind turbine power plants to study large-scale power systems. This study also demonstrated that the IEC and WECC models may successfully simulate the primary frequency response of wind power plants. The verification of the primary frequency response modeling was done by comparing simulation results to measured wind power plant response for frequency events. Furthermore, the paper [
24] presented field tests designed to validate standard generic stability and power flow models for several large wind power plants. Recently, the work [
25] explored WECC wind-turbine models within the Spanish grid. Other works are devoted to validation of WECC models for PV power plants. As an example, work [
26] focused on model validation during and shortly after a fault. The simulation results, simulated with PSS/E, showed that the generic model successfully reproduced the measured values immediately after the fault. Another example is [
27], which used DIgSILENT PowerFactory to validate the WECC generic PV system models, focusing on large-scale PV plants connected to the distribution or transmission networks. The implemented PV models were tested and validated against the EPRI tool, which represents the WECC specifications. Recently, work [
28] used the DIgSILENT tool to analyze control methods of PV systems on the IEEE voltage stability test system for improving short-term voltage stability. All the mentioned works, alongside our proposed paper, are summarized in
Table 1.
In this work, we focus on the validation of the standard WECC dynamic PV system models, using actual measurements from the Western Texas and Southern California transmission networks. The results of the model are evaluated based on the North American Electric Reliability Corporation (NERC) compliance standards [
29]. Through an extensive set of field tests, we show that the WECC generic models can be used to simulate real dynamic phenomena in large-scale solar PV power plants and propose guidelines for correct usage of these models. The reported tests are conducted on different solar PV plants in coordination with the plant owners and the transmission system operators. The tests are based on the NERC compliance standards and include dynamic stability tests for volt-var control and primary frequency response. We compare the simulation results to real measured data and show that the average normalized mean square error is 0.4% and the average normalized maximum error is smaller than 7.5%. Based on these comparisons, we show that the WECC models are especially accurate when the photovoltaic system is connected with a low impedance to the main network and that they successfully predict the frequency dynamics following a large disturbance. However, we show that these standard models cannot simulate fast transients, for instance transients that may appear following capacitor switching.
The paper is organized as follows.
Section 2 outlines the evolution of solar PV plant dynamic models in the WECC.
Section 3 introduces the method we used for verification, and
Section 4 and
Section 5 demonstrate the capabilities of the WECC models.
Section 6 concludes the paper.
3. Dynamic Model Verification: Methodology
The WECC second generation solar PV plant generic models were validated in this work based on actual field tests. The tests were performed in large utility PV plants connected to the transmission network in Western Texas and Southern California. The measurements were compared to PSS/E simulation data, in order to learn the relative advantages and disadvantages of these generic models. The measurements were taken from either high-speed power system monitoring devices such as phasor measurement units, digital fault recorders, or slower second-level resolution SCADA systems. The facility model parameters were provided by the equipment manufacturers and can be found in [
12].
The tests were designed in accordance with NERC standards [
34] and focused on dynamic phenomena [
35,
36]. The most commonly used test is the “staged test” [
24,
37,
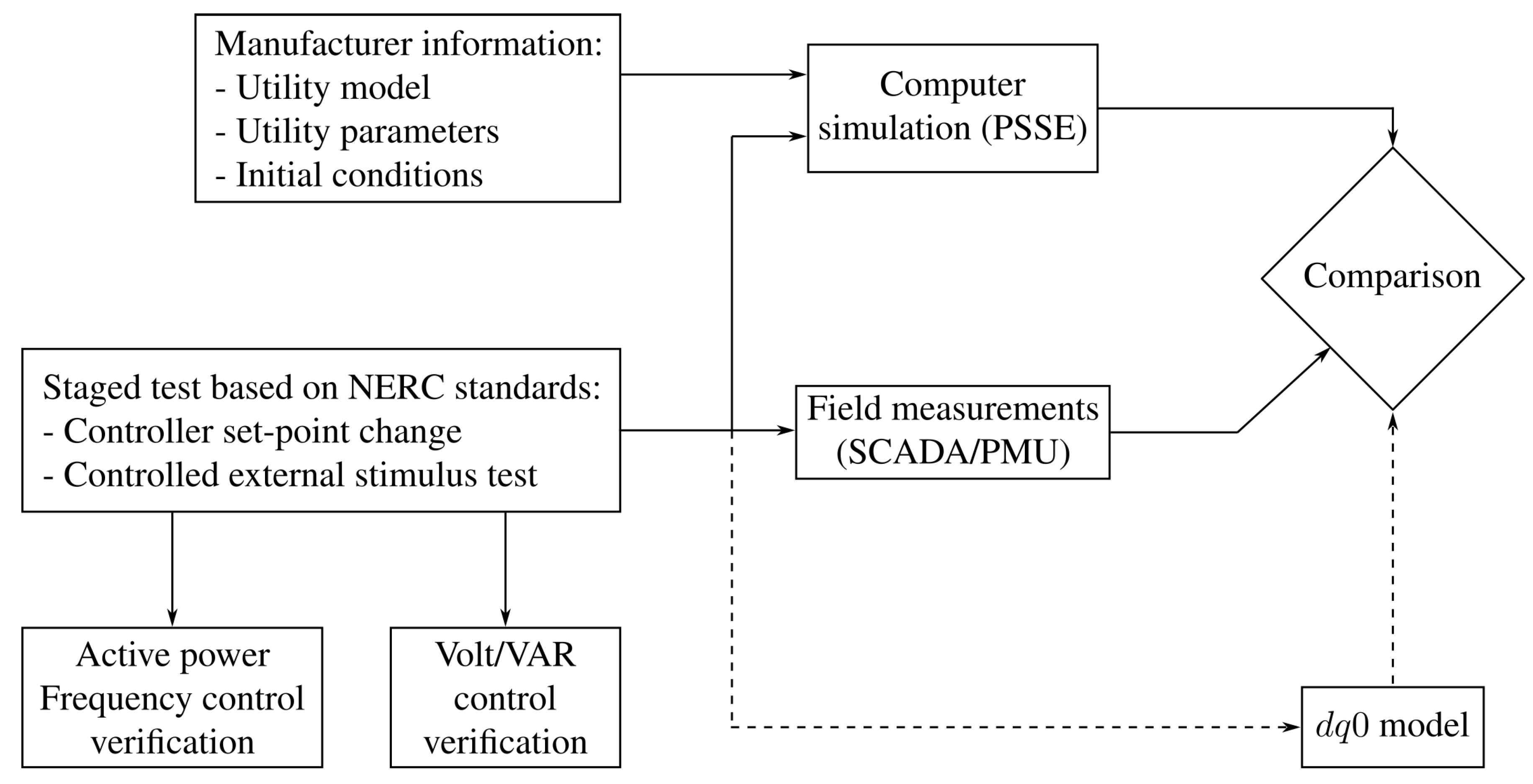
38], which is used extensively for dynamic model verification due to its simplicity and easy customization of the testing procedures. It should be noted that the purpose of the test was to validate the dynamic performance of an entire plant, not just a single inverter unit. The plant was connected and synchronized to the grid during the entire test. A flowchart that shows the overall process of the validation methodology is presented in
Figure 8. First, computer simulation based on the manufacturer information was designed in PSSE. Then, different “staged tests” were configured for both simulation and measured data. Finally, a comparison between the simulations results and field measurements was done. In addition, several tests included a comparison to a
model, which was used to describe fast dynamic behavior and rapid amplitude and phase variations. A detailed review of simulation techniques based on
transformation can be found in [
39,
40]. Here, the
simulation was attained using MATLAB with the
toolbox [
41].
Evaluation Metrics
In order to compare the simulation results to the measured data, we used two familiar measures: the normalized mean squared error (NMSE) and the normalized maximum estimation error (NMEE). The first measure (NMSE) is defined as:
where
is the normalized real measured data vector and
is the normalized simulated model vector. Both vectors are normalized with respect to their maximum values. The second measure (NMEE) is defined as the maximal difference between the normalized real measured data vector and the normalized simulated model vector:
In addition, the standard error was calculated for measurements’ uncertainty to make sure that the influence on accuracy was minimal. The standard error function is defined as:
where
N is the number of observations and
s is the normalized standard deviation.
5. Active Power/Frequency Control Verification
The active power/frequency control verification test was executed in accordance with the U.S. grid codes, which meant that generation units must respond to frequency deviations outside a dead-band of 0.036 Hz with a predefined droop value. In order to react to a change in the interconnection frequency, the plant’s active power should be changed as follows:
where
is the change in the active power output,
is the nominal maximum active power,
is the active power before the change at steady-state,
P is the active power after the change at steady-state,
Hz is the frequency before the change,
f is the frequency after the change at steady-state,
Hz is the dead-band, and droop is the active power regulation coefficient normalized to the frequency change. All parameters and configurations of the inverters were based on guidelines from NERC Inverter-Based Resource Performance Task Force, which recommends specifications for inverter-based resources connected to the electrical grid in North America [
42]. The calculation of the frequency and dynamic performance characteristics for active power-frequency control of inverter-based resources were taken from this report.
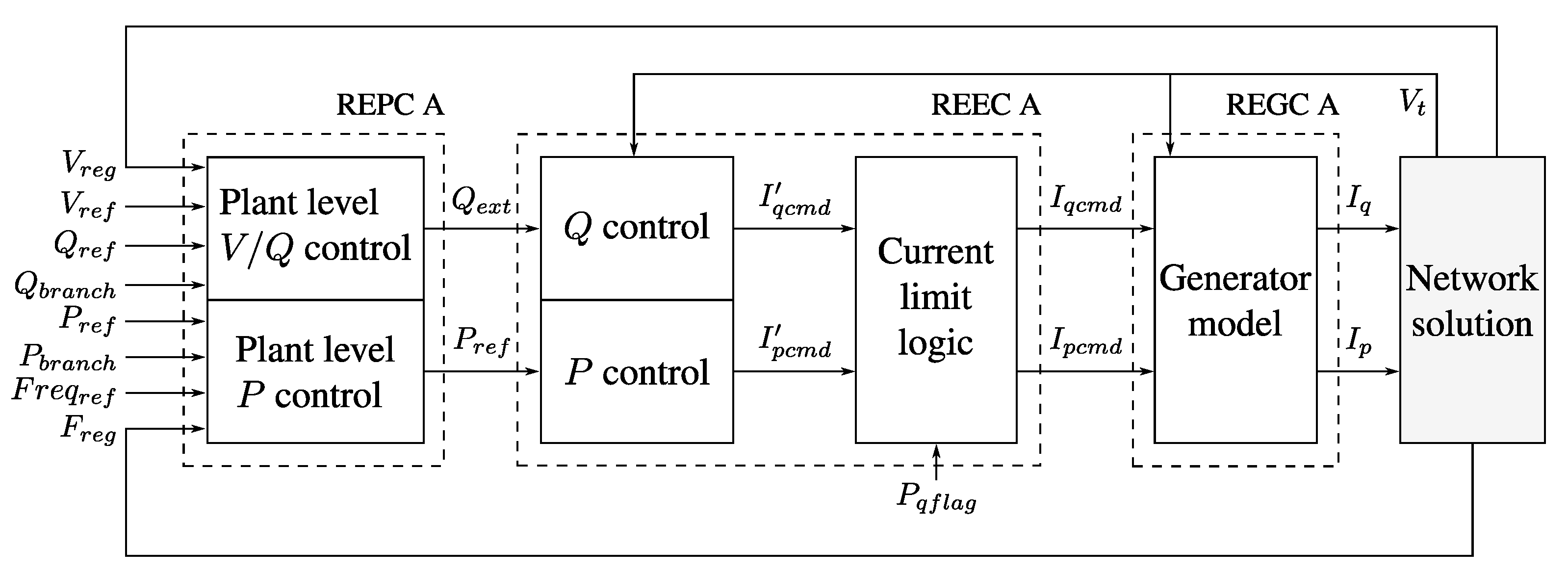
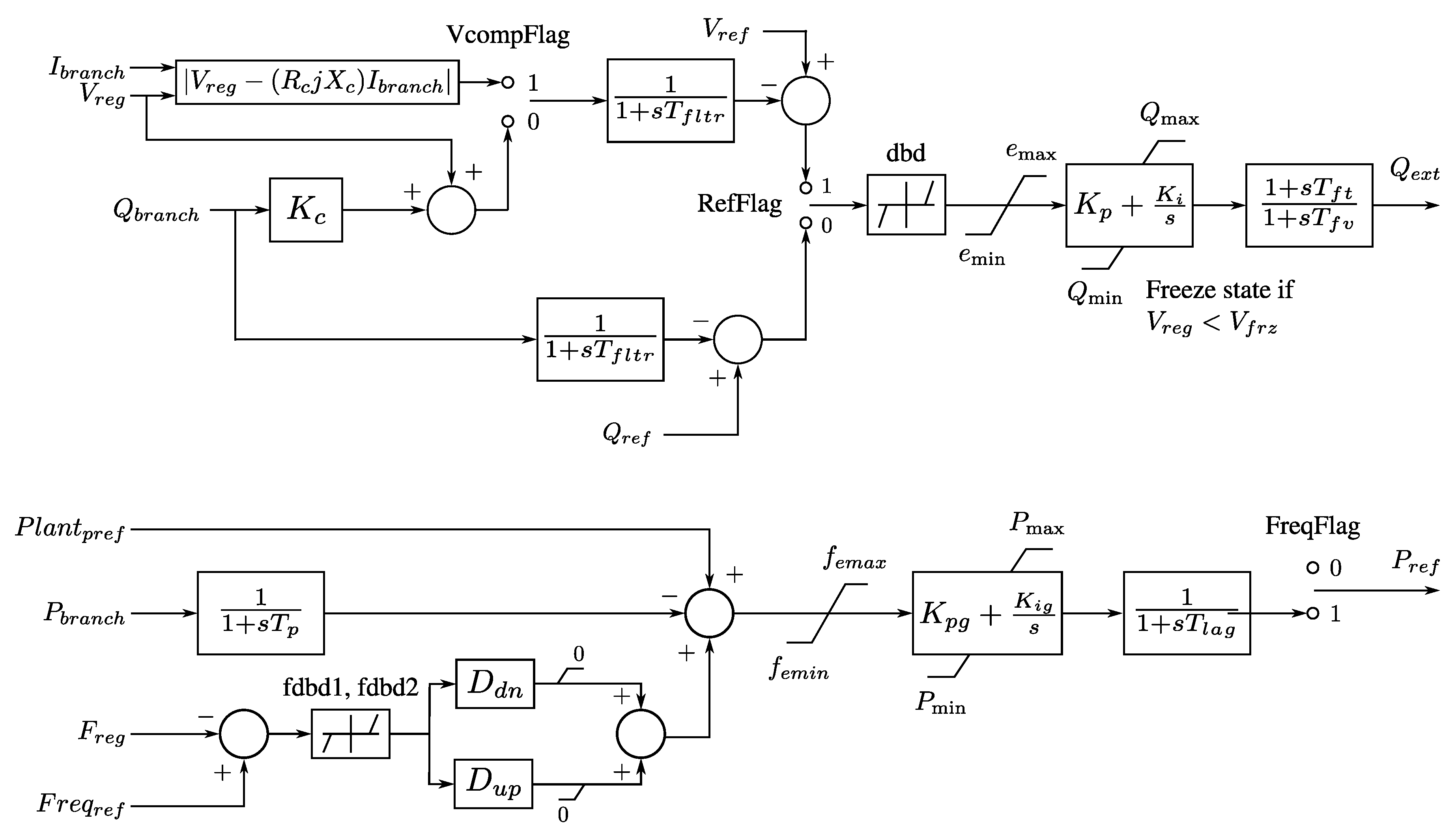
In the following tests, “FreqFlag” in the plant controller REPC-A model (see
Figure 5) was set to one, to enable the frequency control mode [
43]. The tests were done by changing the reference frequency set-point (
) in the primary frequency control block, in order to emulate a step input to the plant controller. The emulated step could be a recorded frequency event or a synthetic frequency step. Note that for over-frequency events, the plant could easily reduce its active power. However, for under-frequency events, additional active power is needed for reserve; therefore, PV resources can provide frequency control services only if the plant is operating at a lower than maximum active power level.
5.1. Verification Using a Synthetic Frequency Signal
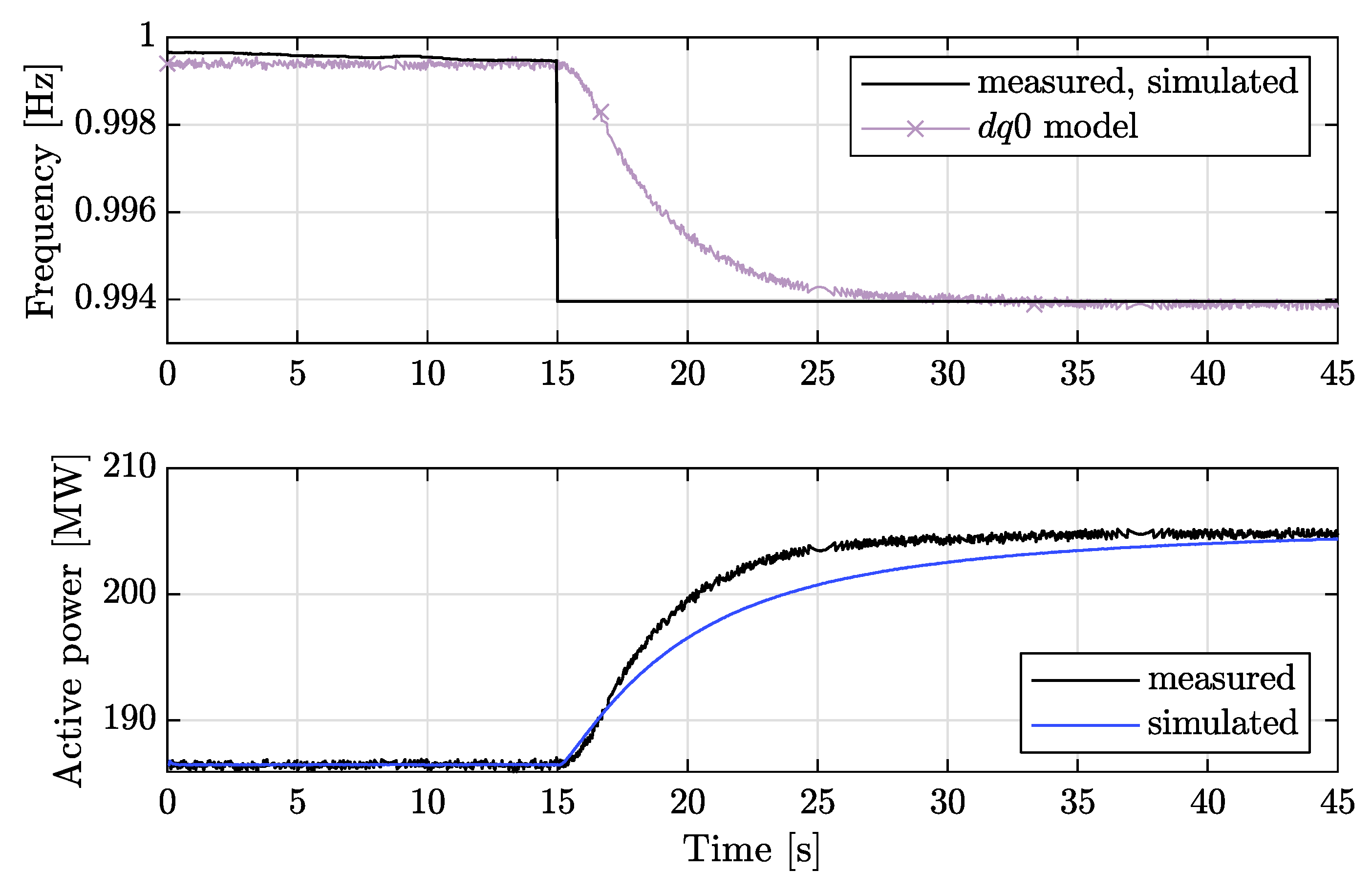
In this test, a frequency response test was performed on a 250 MW solar PV plant by emulating a synthetic frequency signal step, which served as an input to the plant-level controller (for inverter configurations, see
Appendix A). Two frequency signal steps were emulated for two different experiments: under-frequency and over-frequency response. In the under-frequency experiment, the synthetic frequency signal was changed from 60 Hz to 59.62 Hz, which caused the inverters to increase their active power in an effort to restore the nominal frequency. During the under-frequency test, the solar PV plant was operated in a curtailed condition at 186 MW, such that there was a reserve of active power. A comparison of simulation results and actual measurements is shown in
Figure 14. The results of the active power showed high correlation between the simulated waveforms and the measurements with
and
.
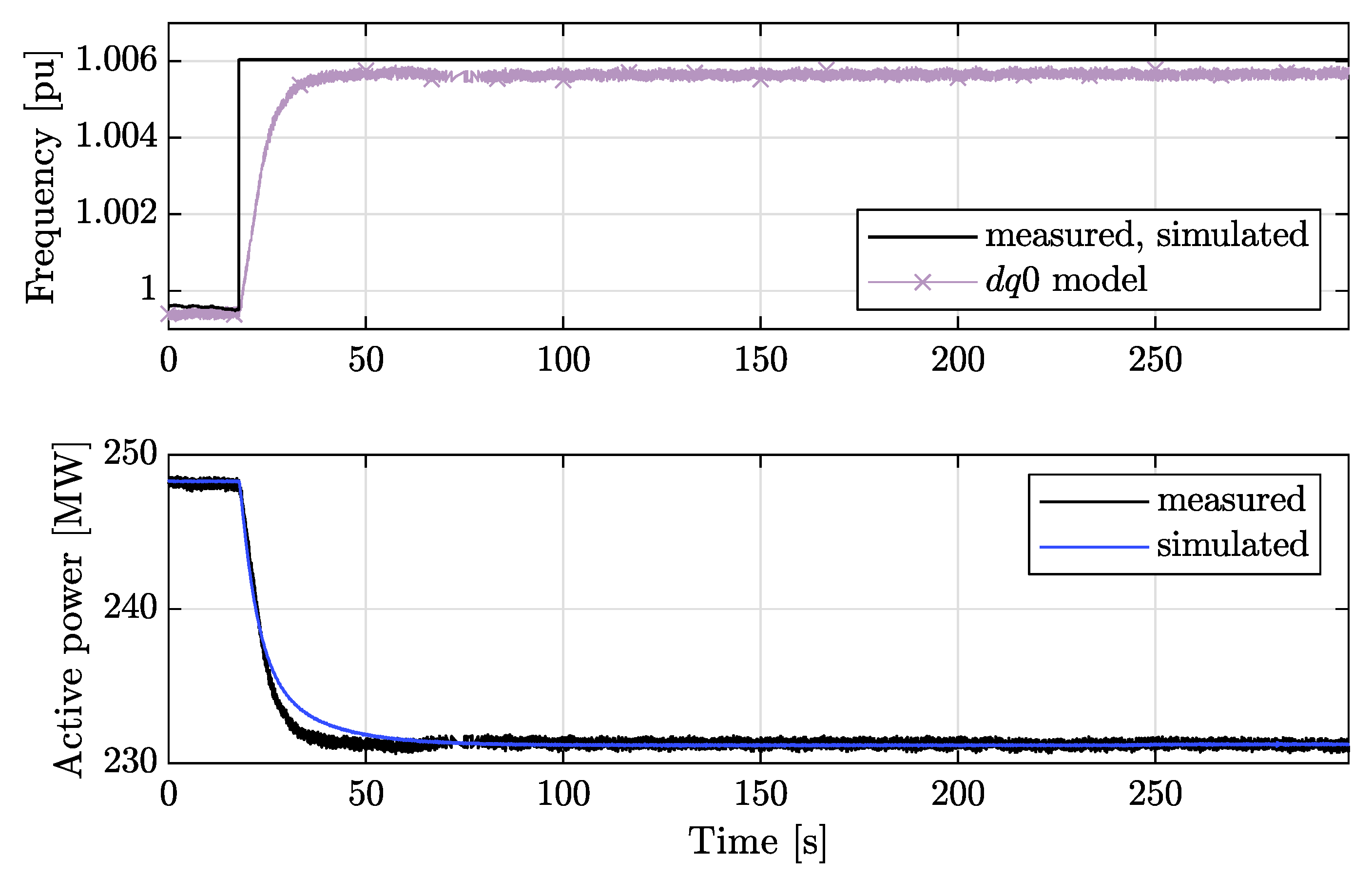
In the over-frequency experiment, the synthetic frequency signal was changed from 60 Hz to 60.36 Hz, which caused the inverters to decrease the active power in an effort to restore the nominal frequency. A comparison of the simulation results and actual measurements is shown in
Figure 15. The results of the active power showed high correlation between the simulated waveforms and the measurements with
and
.
Furthermore, for both experiments, the change in the active power output (
) was in accordance with (
4) and (
5), which showed that the WECC model was accurate when predicting such dynamic phenomena. When comparing the results of the
model to the measured data for the frequency change, good correlation may be observed. Again, the WECC dynamic model results were almost equal to the measurements; thus, the WECC model was more accurate than the
model.
5.2. Disturbance-Based Model Verification
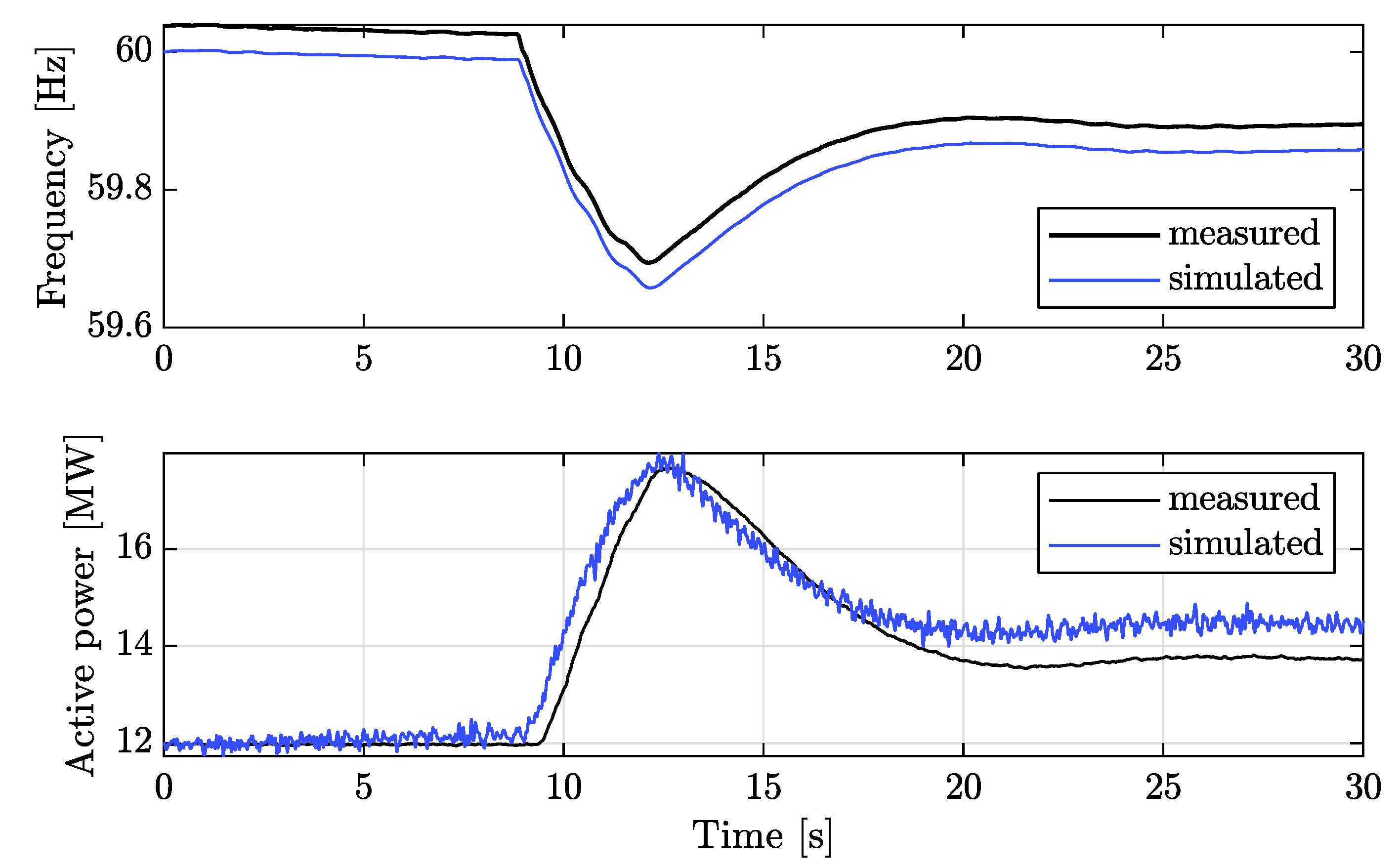
Another method to verify the model performance is to use a recorded frequency signal from an actual grid event (for the inverter configuration, see
Appendix A). This recorded frequency signal was injected into the PPC model in order to monitor the dynamic behavior of the PV plant, in response to the emulated event. In this experiment, the frequency signal was taken from an actual grid event that occurred on 29 November 2011, in the Electric Reliability Council of Texas. This event resulted in a loss of nearly 1.365 GW. For this test, the plant was set to operate with a 1.67% droop coefficient and was operated in curtailed mode at 12 MW when the event started. In response to the emulated frequency decline, the solar PV plant increased its active power based on the droop characteristic. A comparison of the simulation results and actual measurements is shown in
Figure 16. The change in active power output (
) was in accordance with (
4) and (
5). Since in the simulation
and in the real event
, there was a gap between the signal respective values of
,
, which was considerably higher than the previous tests. However, the simulated signals, both frequency and active power, followed the measured signal gradient, regardless of this constant gap.
5.3. Results’ Summary
The NMSE and NMEE measures reported in the experiments can be found in
Table 3, and the active power calculations can be found in
Table 4. For the under- and over-frequency response experiments, the simulations and real measurements were equal. For the reproduced grid event, since the initial frequency was different between the simulation and real measurements, the calculations were done separately for each case. The average NMSE value was 0.85%, and the average NMEE was 2.4%. The standard error of the active power measurements for all the experiments was small and did not significantly affect the accuracy
. Furthermore, the under- and over-frequency response experiments were compared to the
model, and it was shown that the WECC simulation model was more accurate.

 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}















