Sequential Model Predictive Control of Three-Phase Direct Matrix Converter





Abstract
:1. Introduction
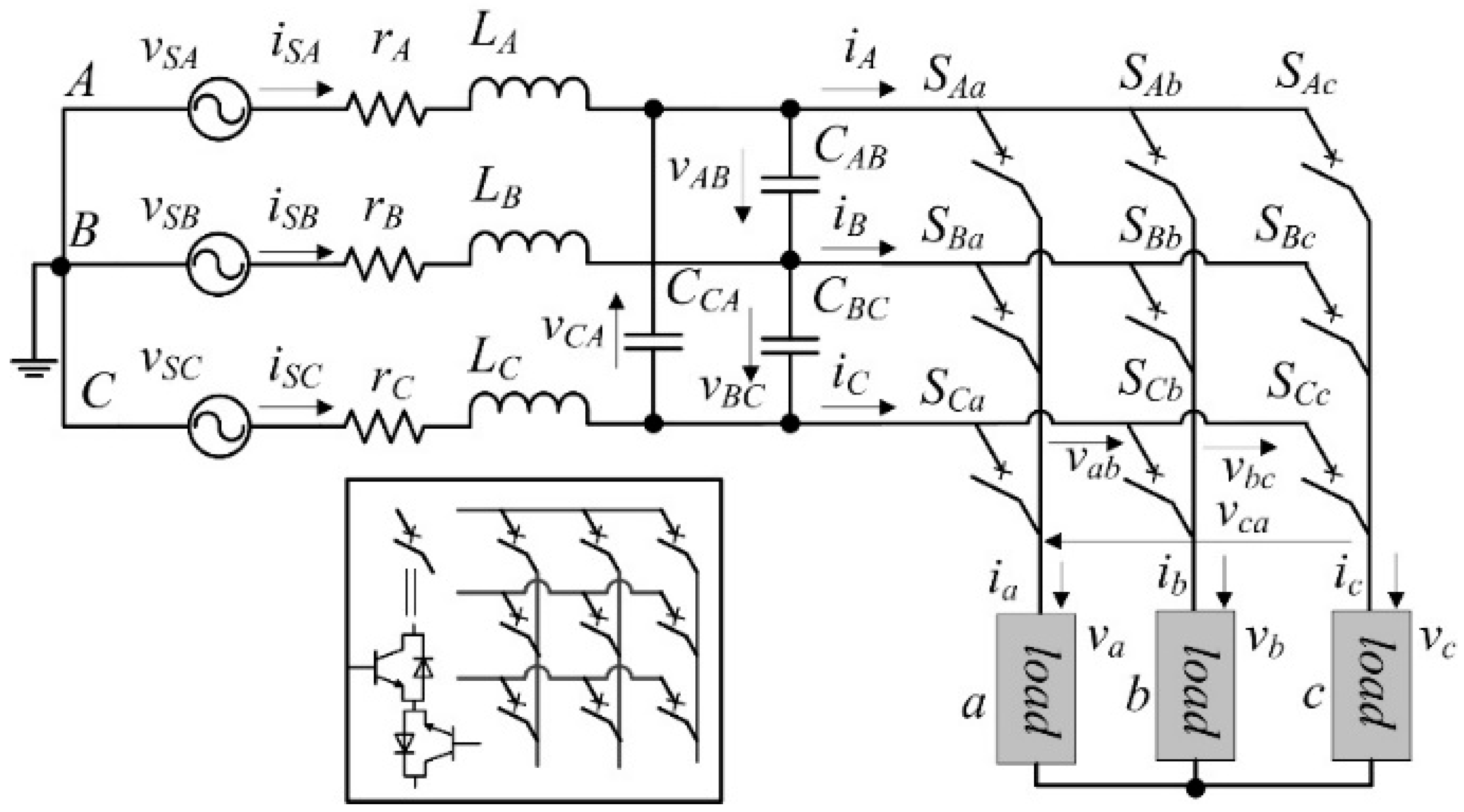
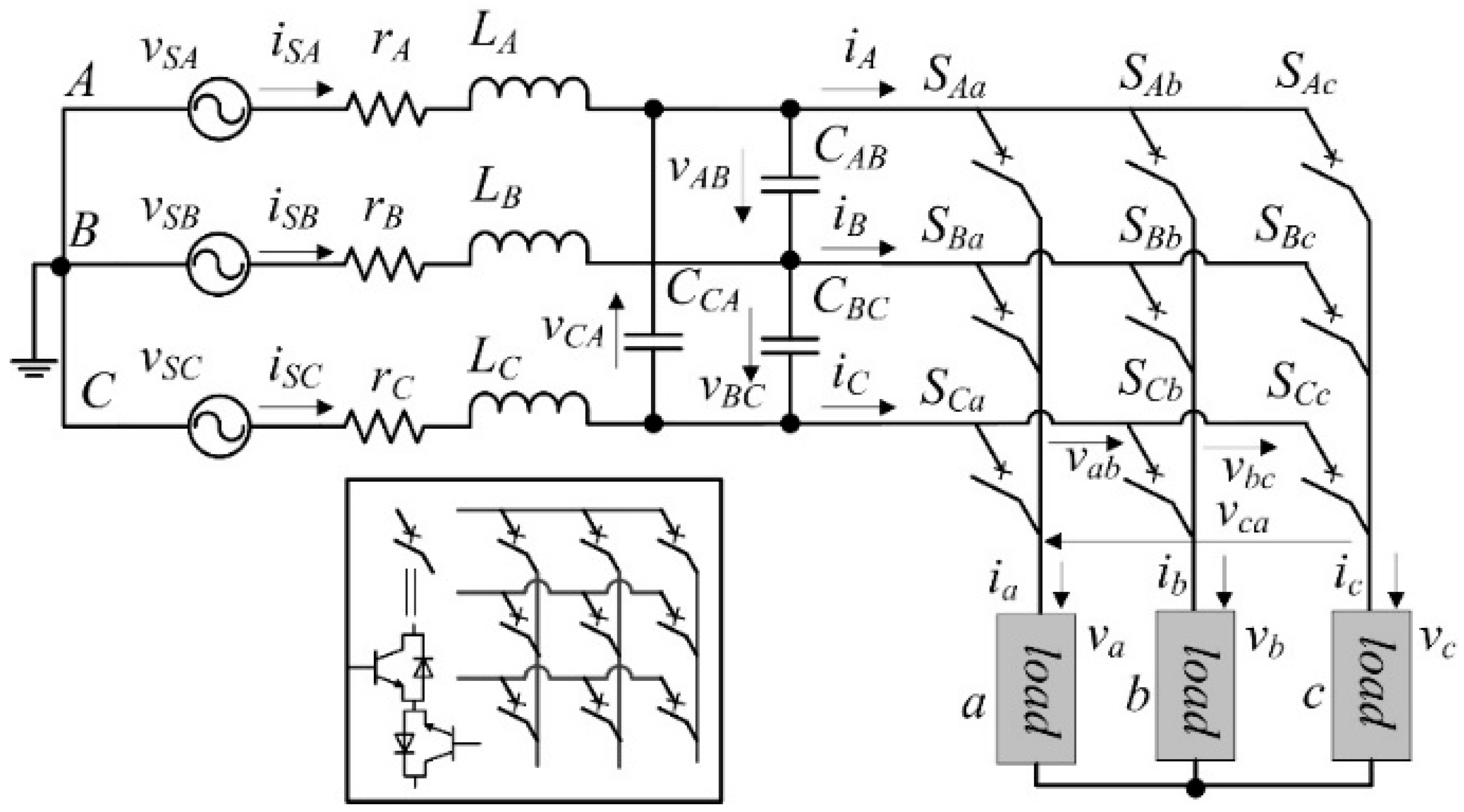
2. Prediction Models of the Matrix Converter and Load
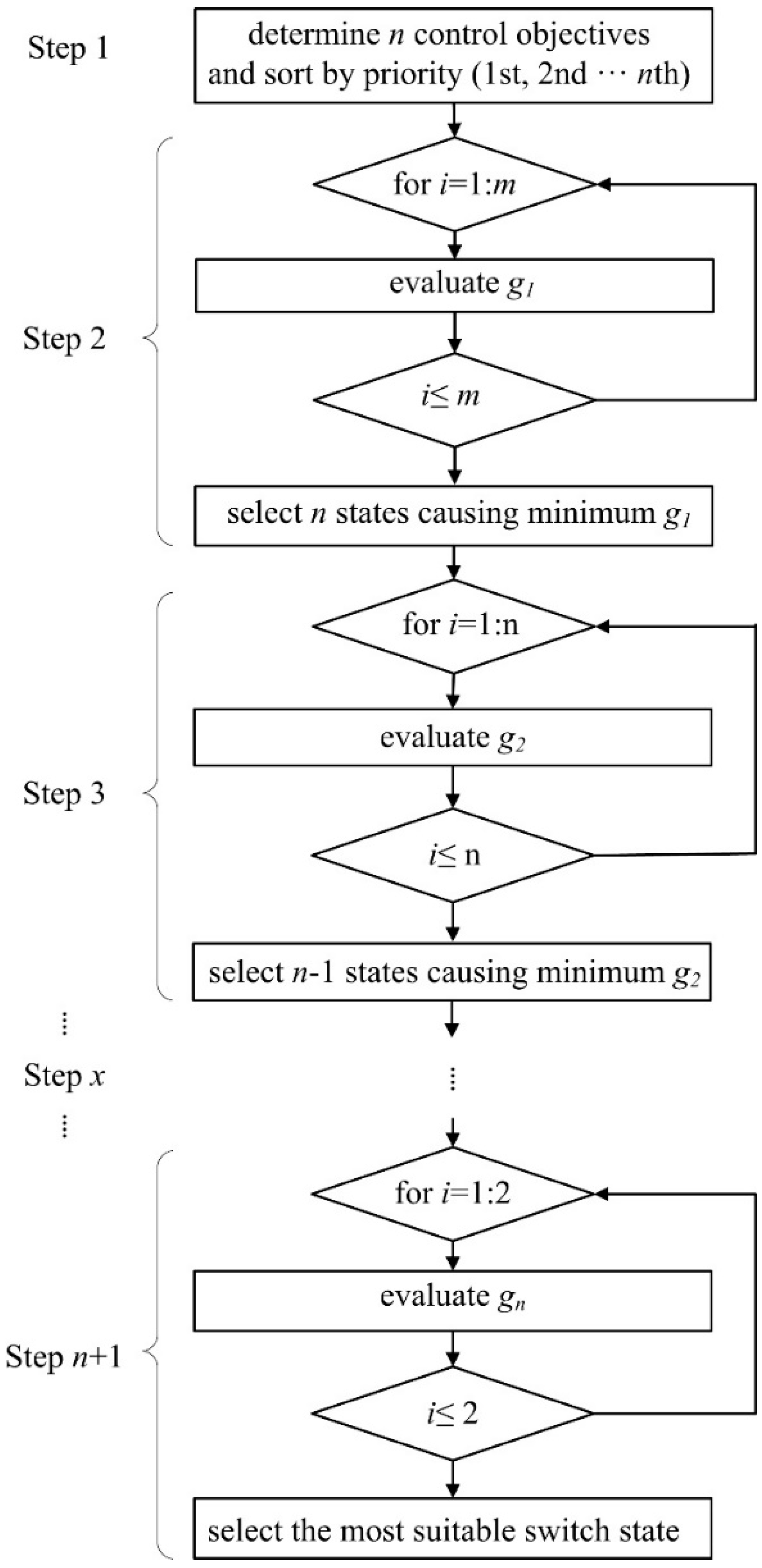
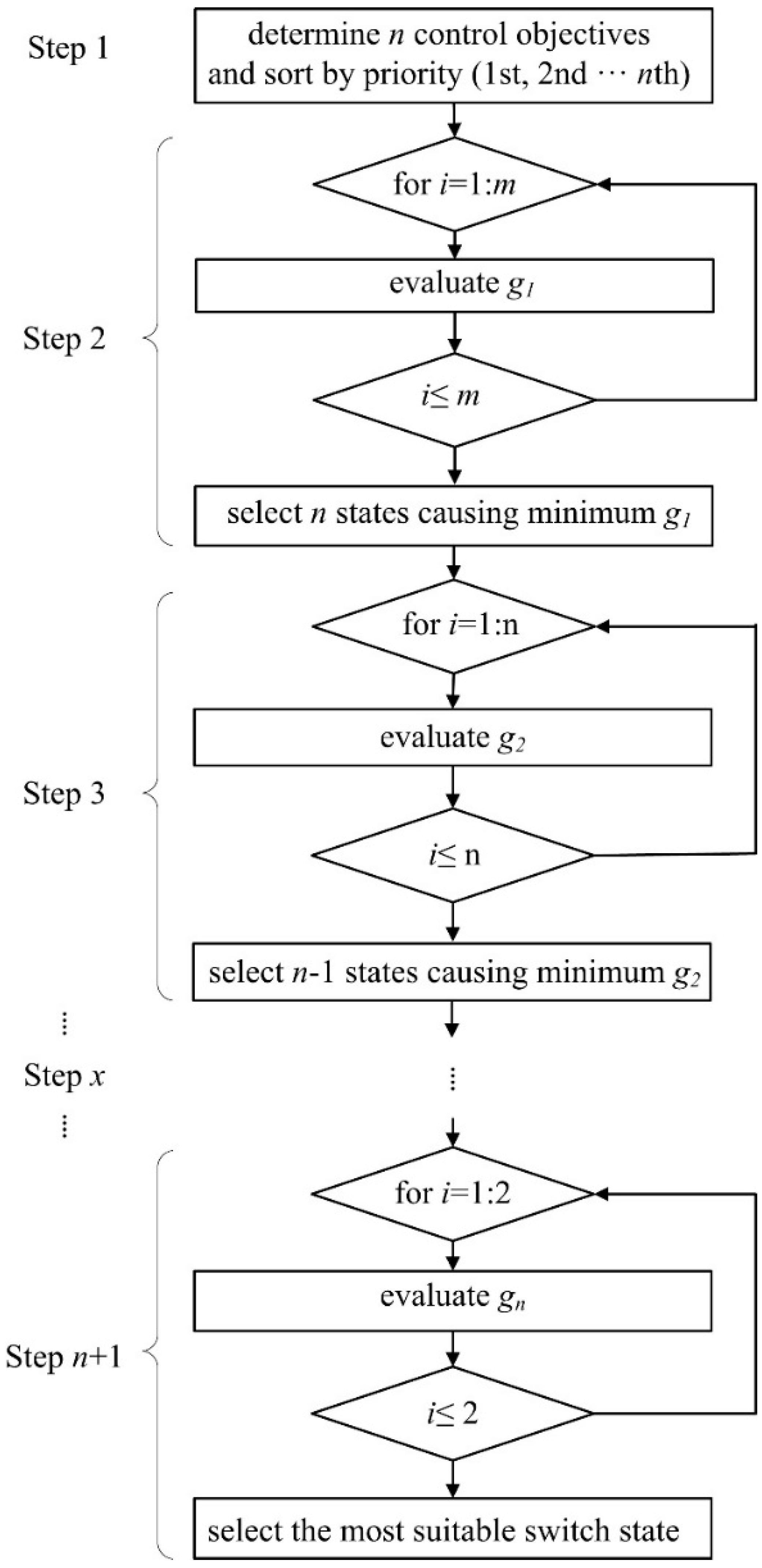
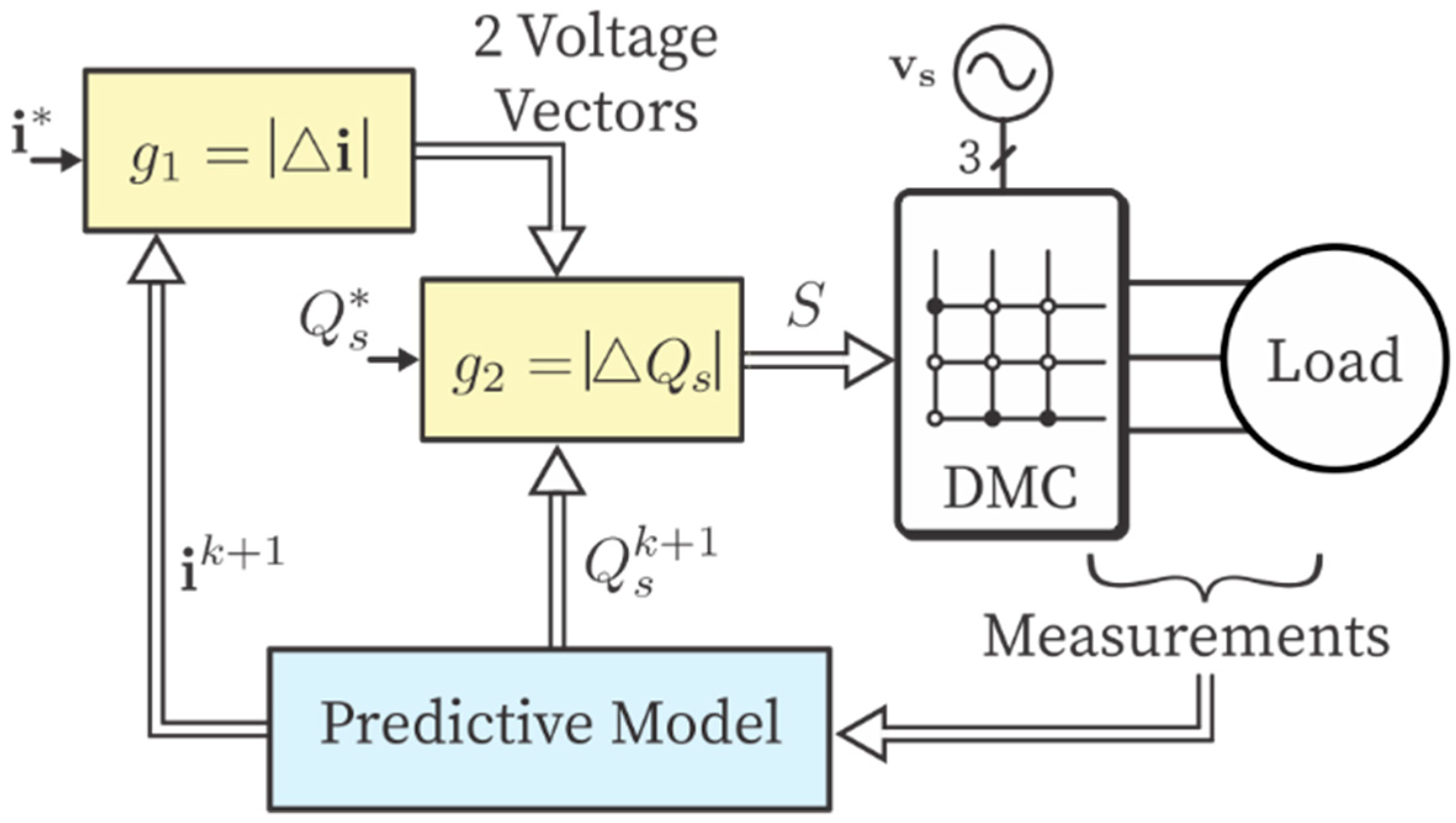
3. Systematic Descriptions of SMPC
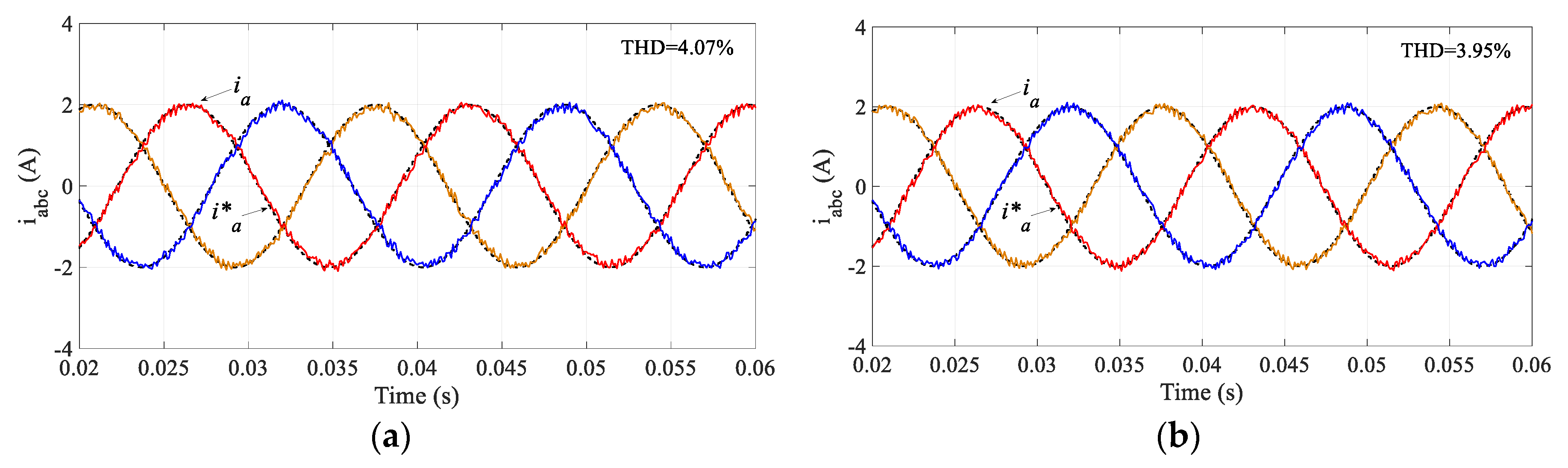
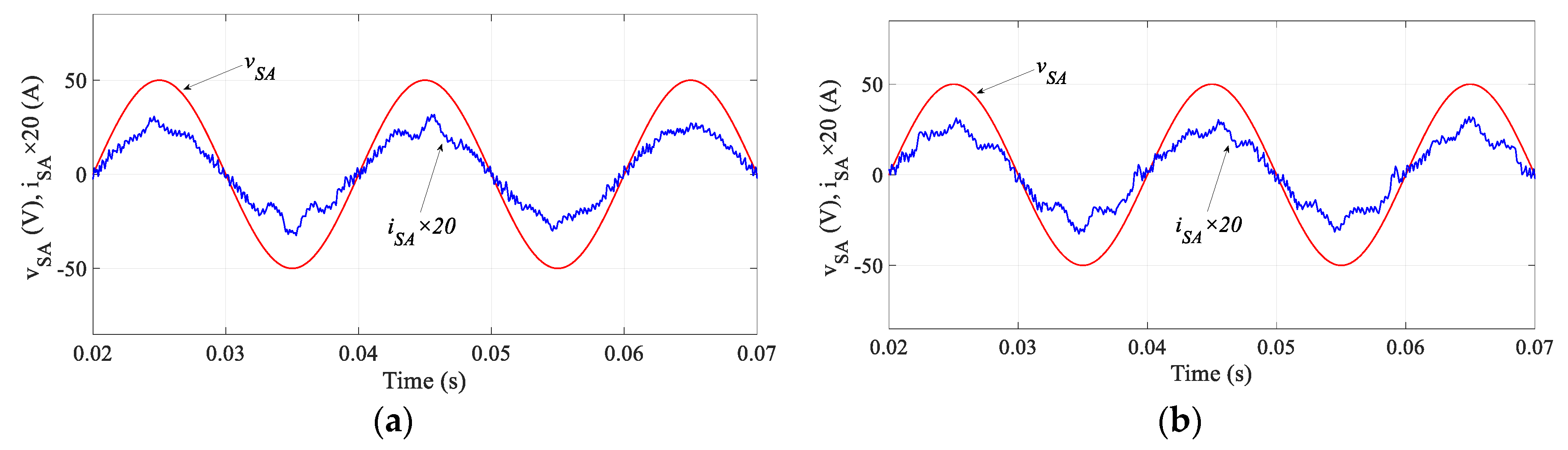
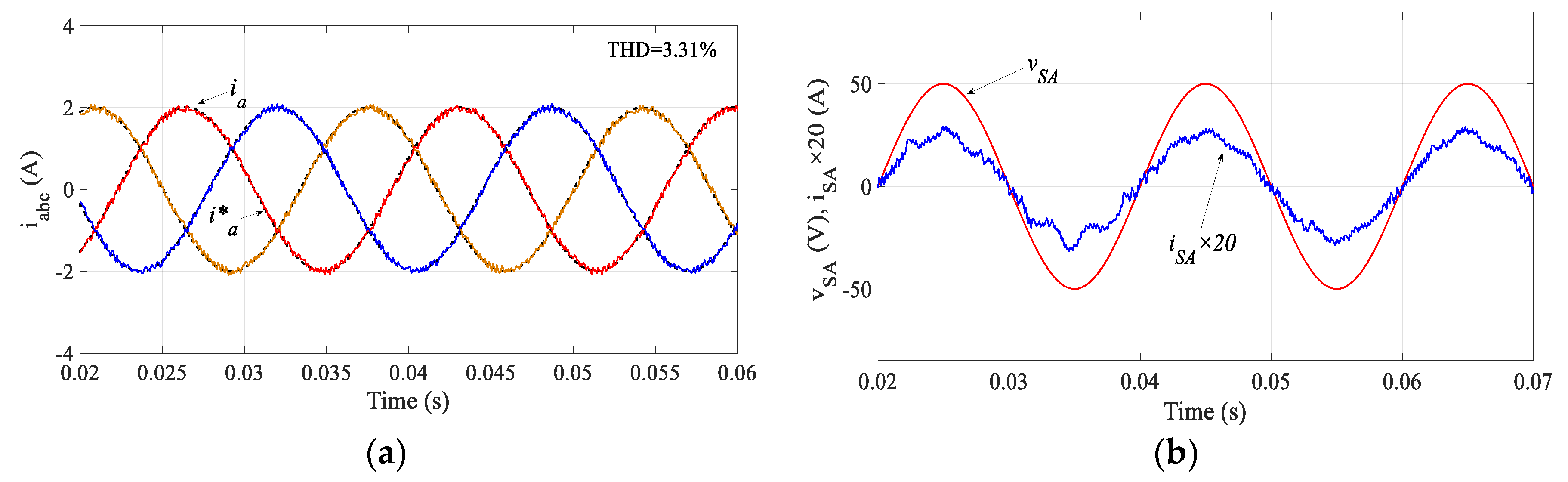
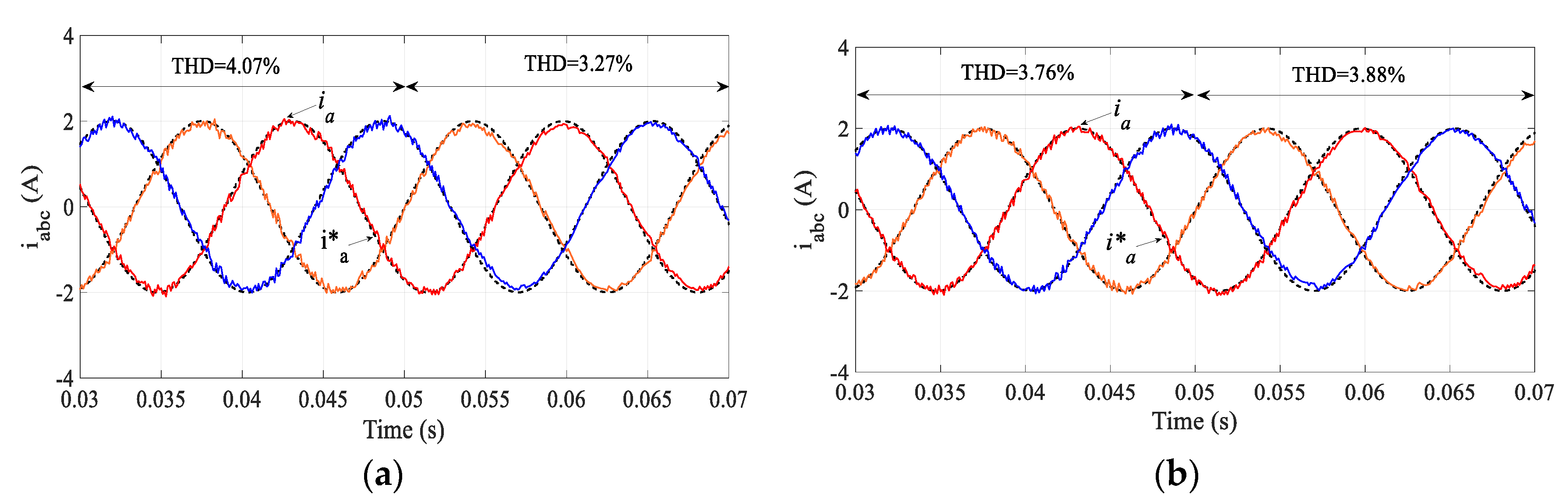
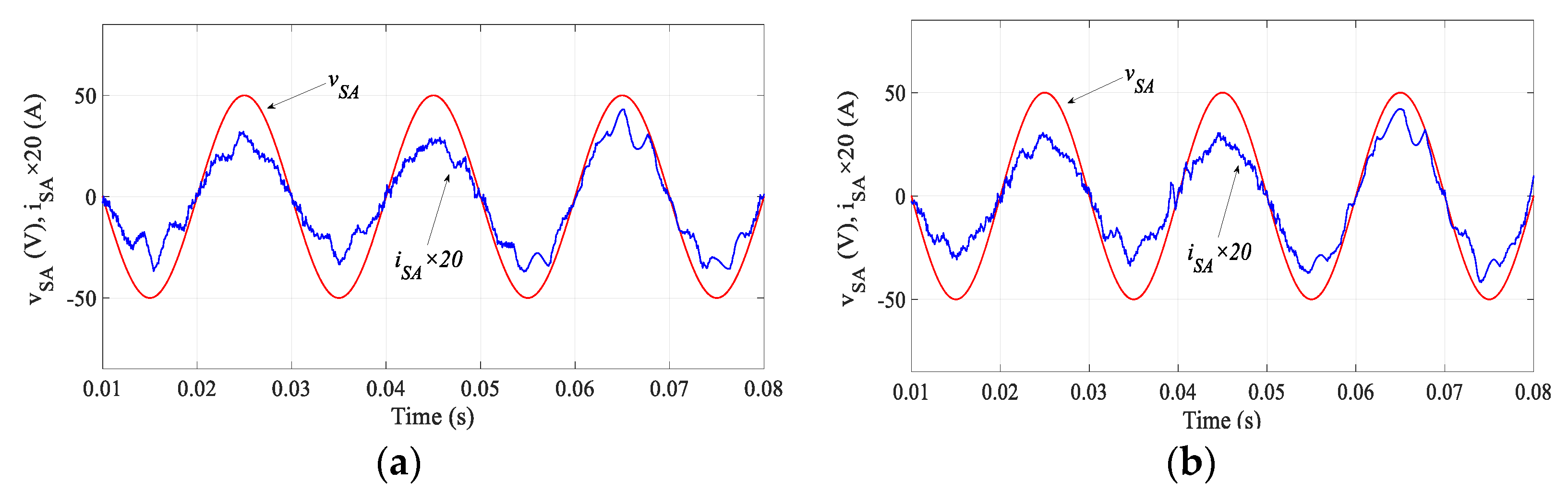
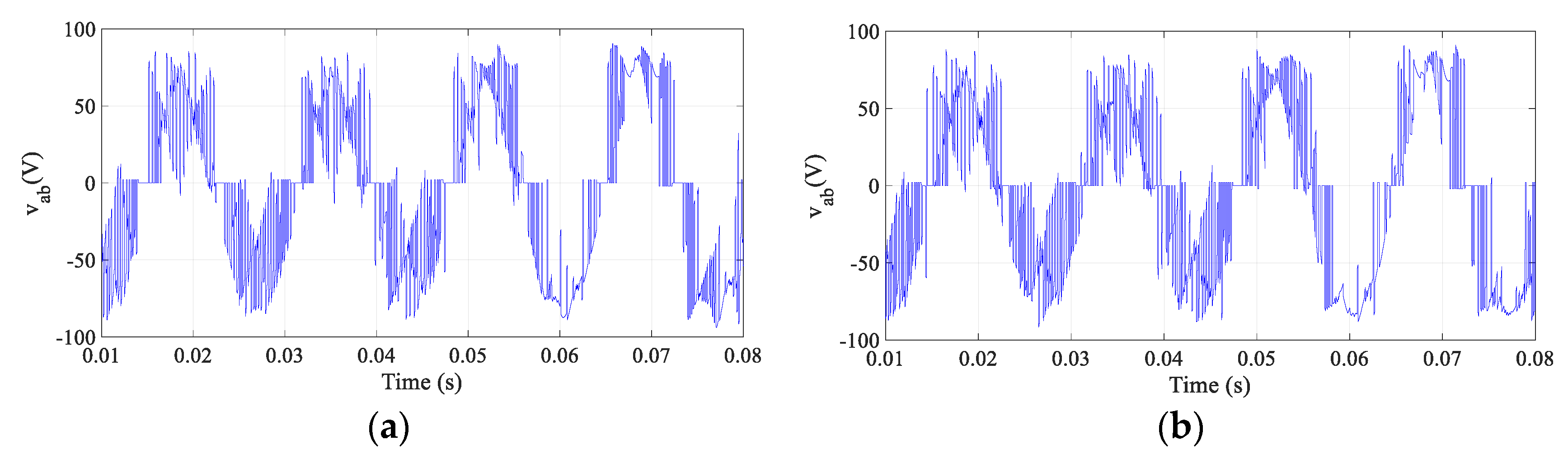
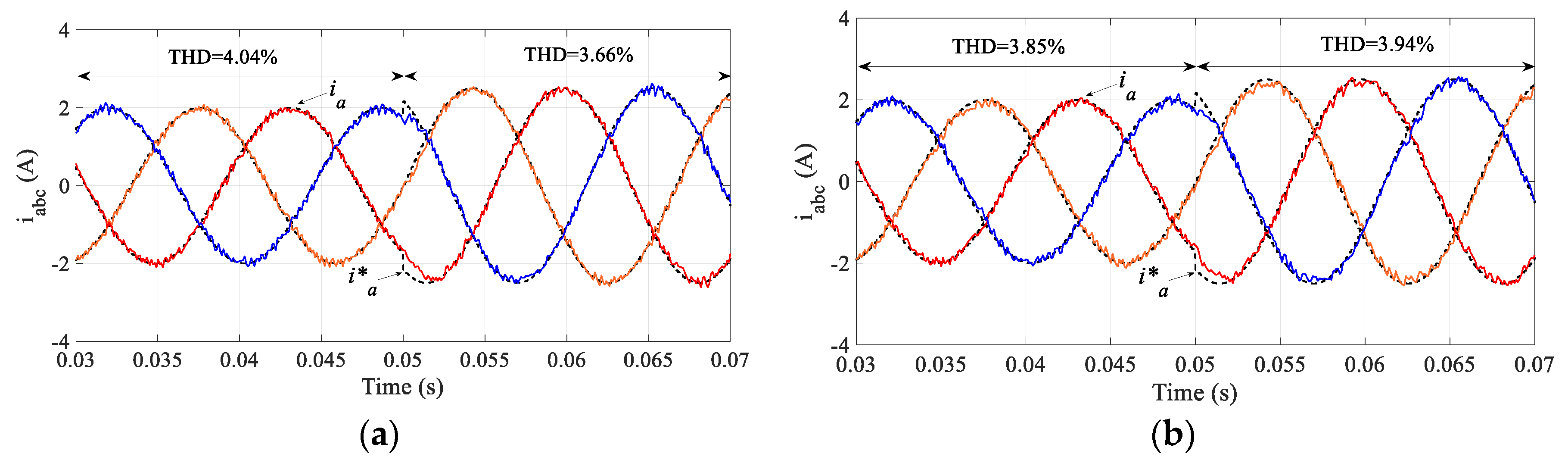
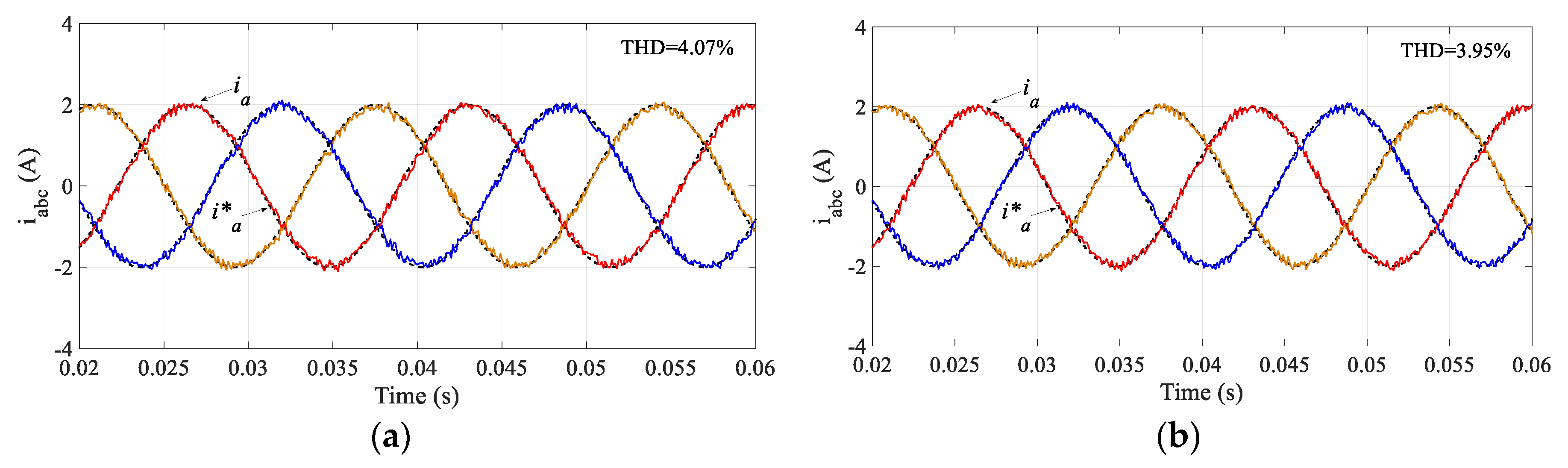
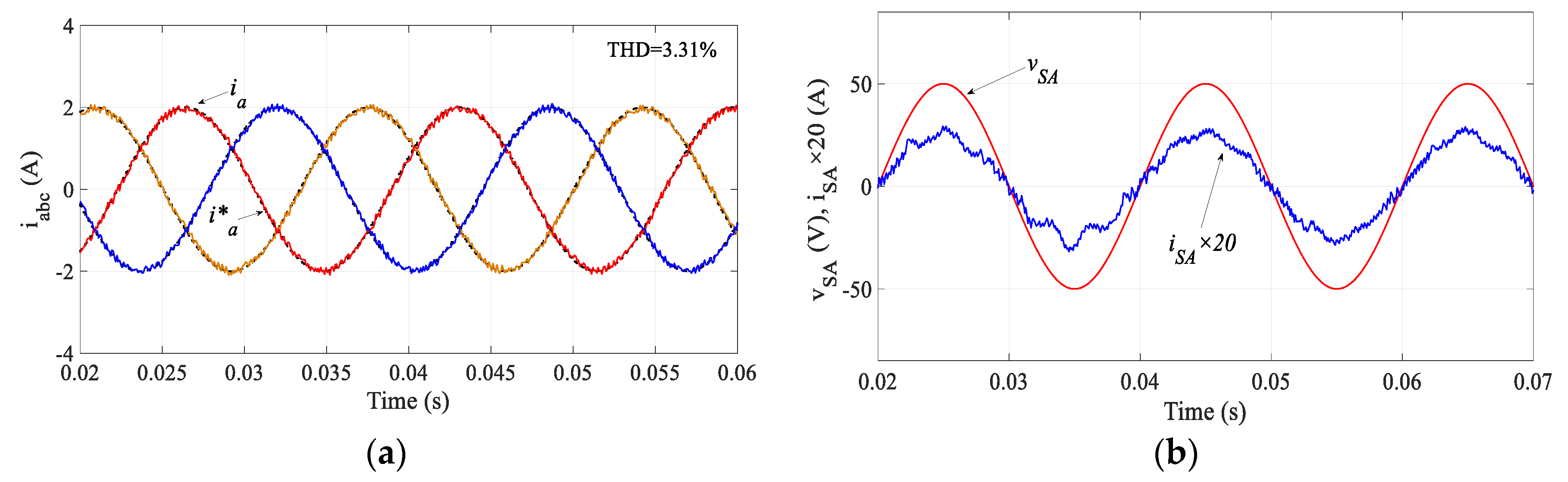
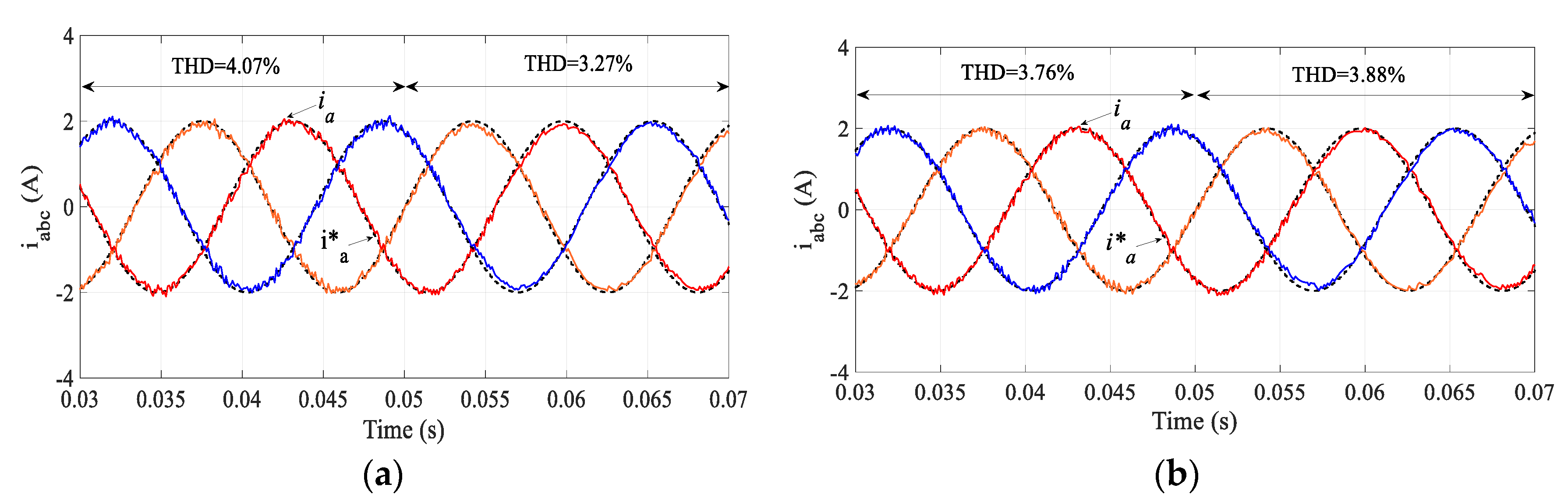
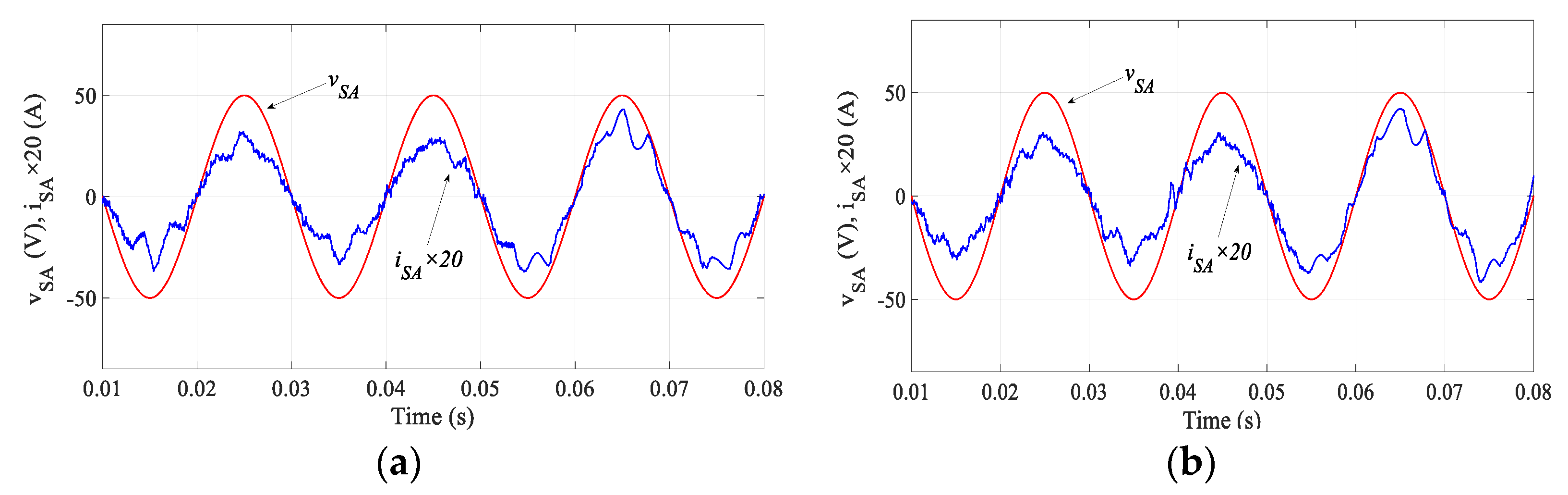
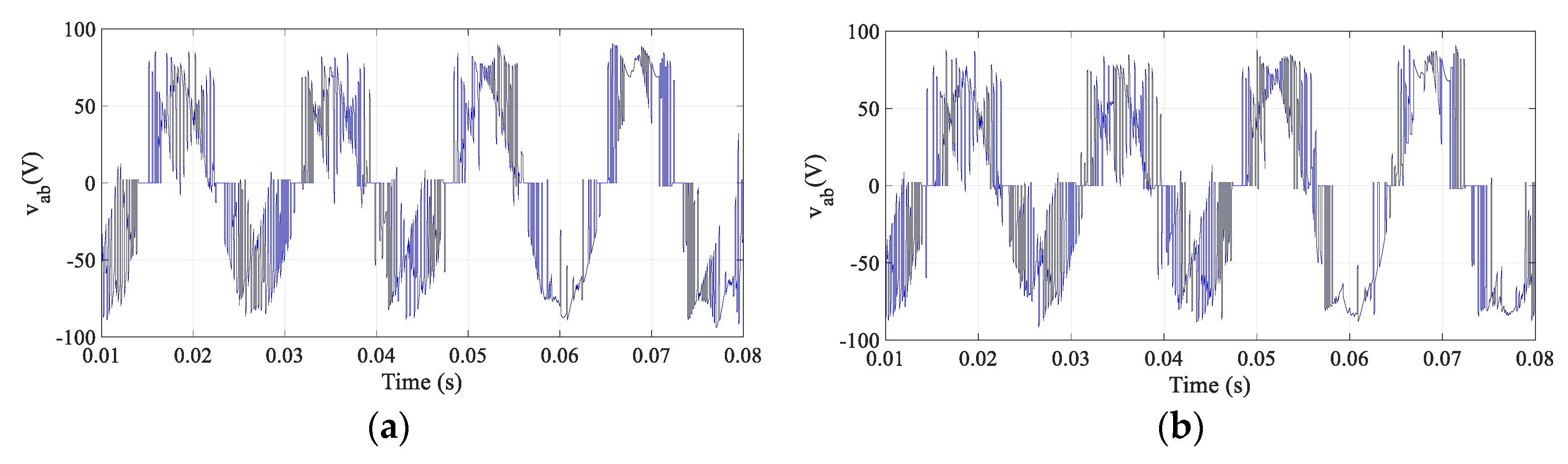
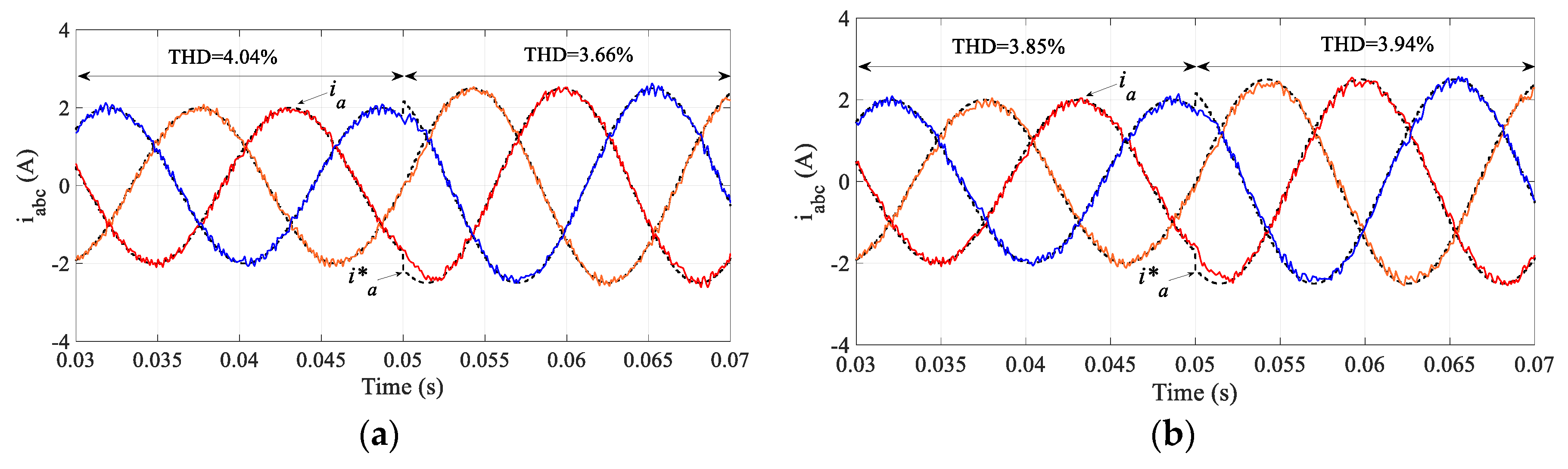
4. Simulation Results
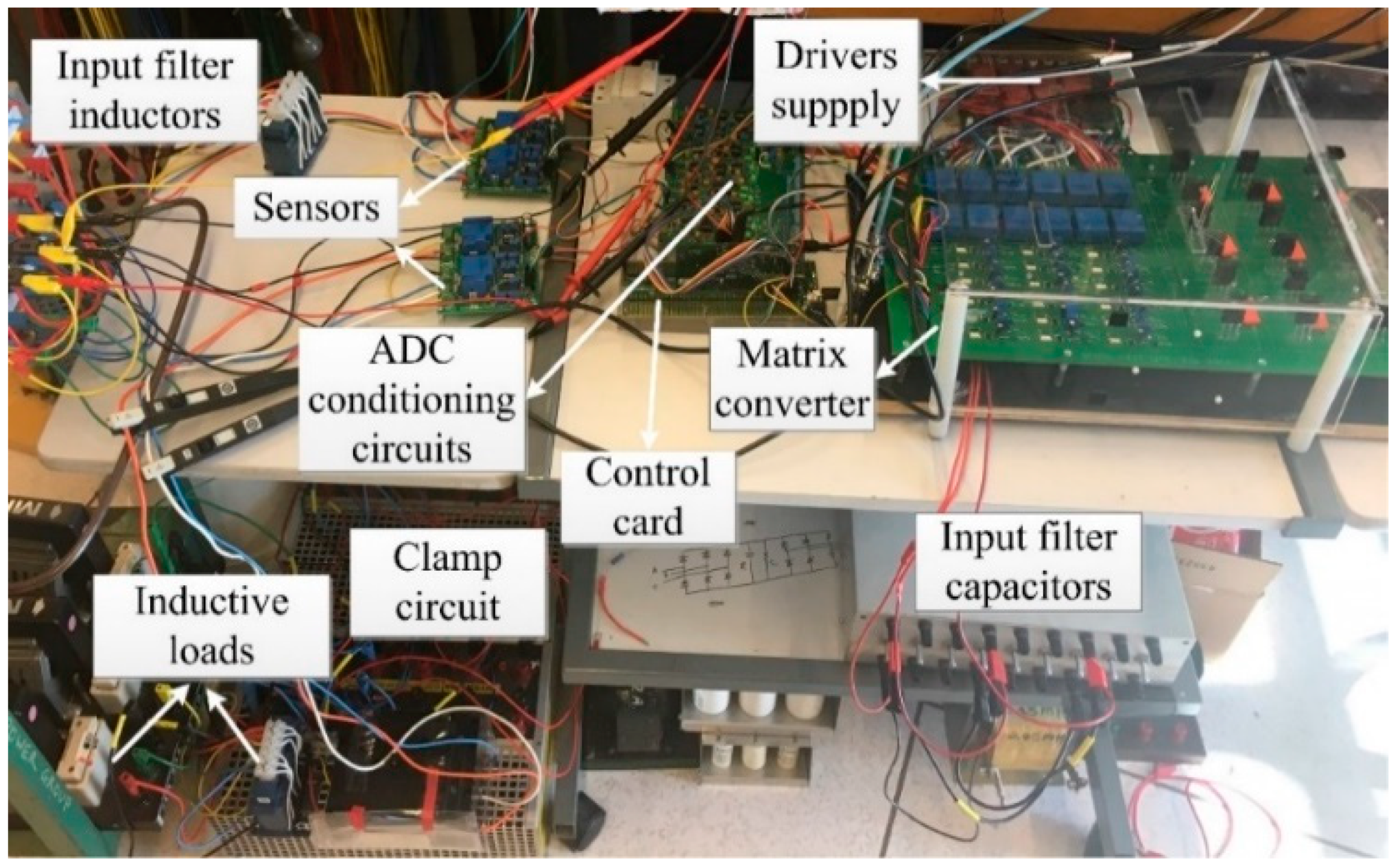
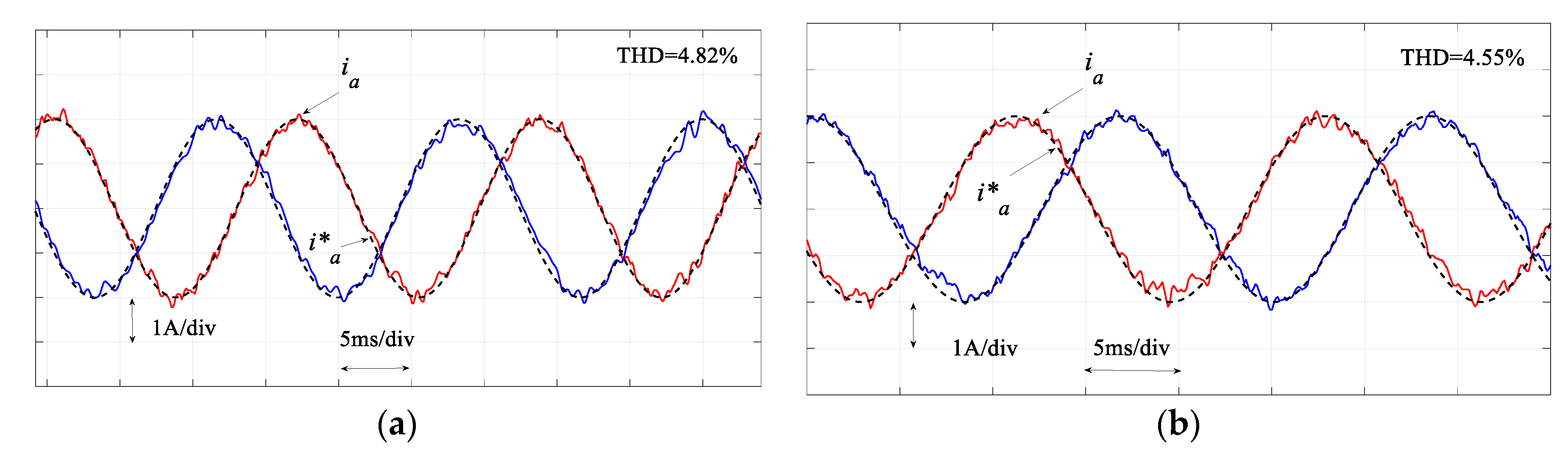
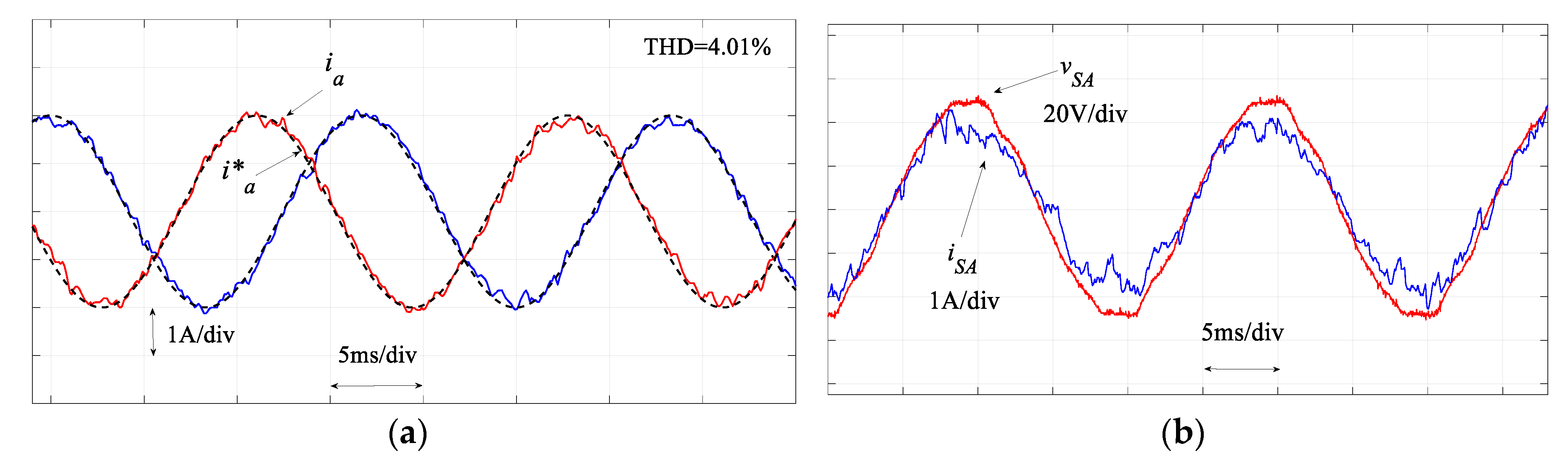
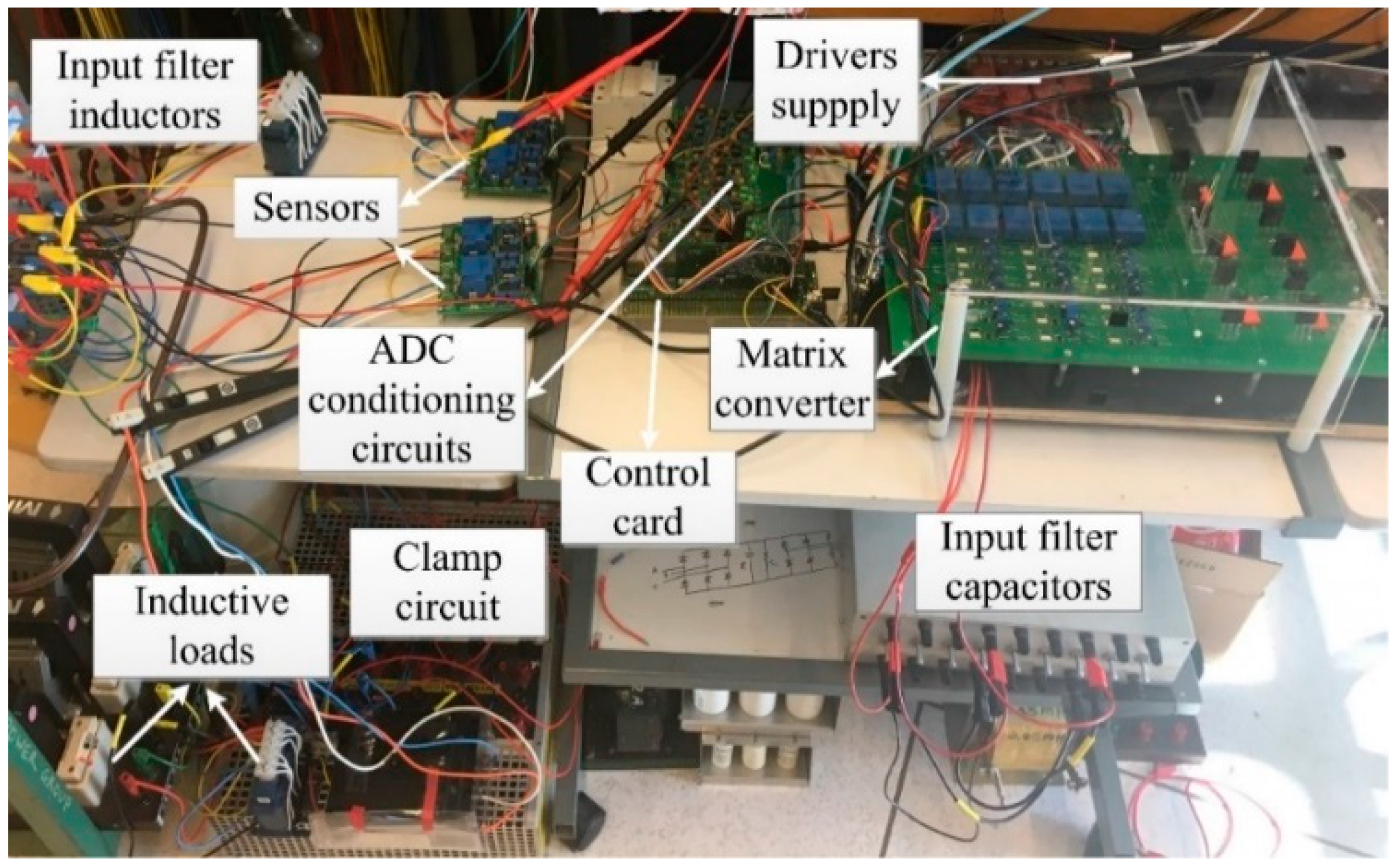
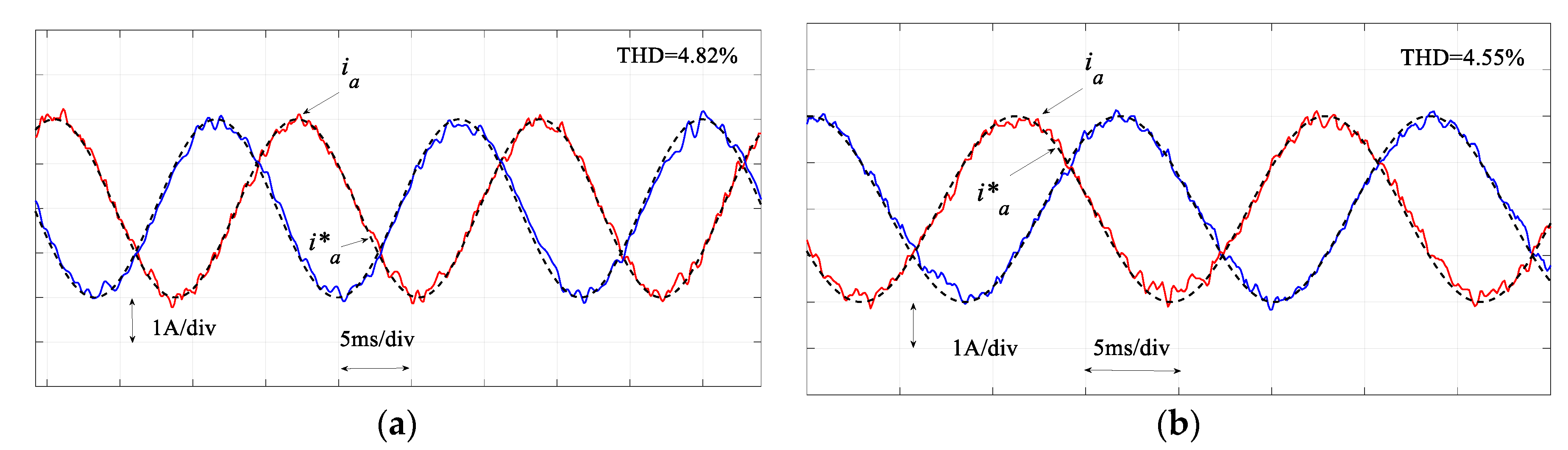
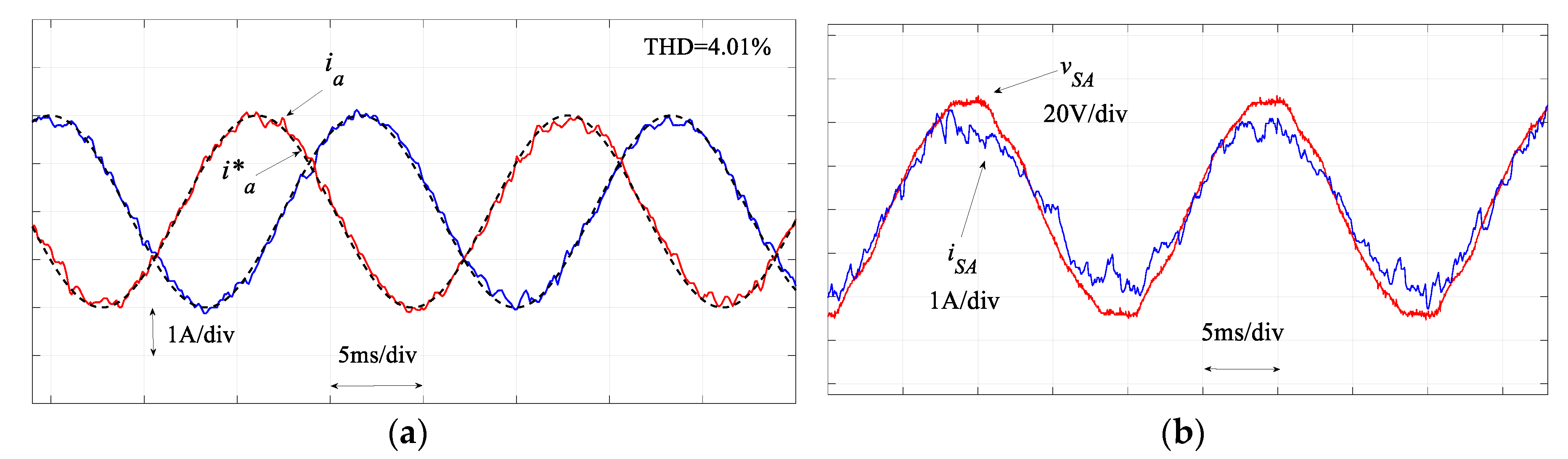
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wheeler, P.; Rodriguez, J.; Clare, J.C.; Empringham, L.; Weinstein, A. Matrix converters: A technology review. IEEE Trans. Ind. Electron. 2002, 49, 276–288. [Google Scholar] [CrossRef]
- Monteiro, J.; Pinto, S.; Delgado Martin, A.; Silva, J.F. A new real time lyapunov based controller for power quality improvement in unified power flow controllers using direct matrix converters. Energies 2017, 10, 779. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Dorrell, D.G. Control and Applications of Direct Matrix Converters: A Review. Chin. J. Electr. Eng. 2018, 4, 18–27. [Google Scholar] [CrossRef]
- Empringham, L.; Kolar, J.W.; Rodriguez, J.; Wheeler, P.W.; Clare, J.C. Technological issues and industrial application of matrix converters: A review. IEEE Trans. Ind. Electron. 2013, 60, 4260–4271. [Google Scholar] [CrossRef]
- Rodriguez, J.; Rivera, M.; Kolar, J.W.; Wheeler, P.W. A review of control and modulation methods for matrix converters. IEEE Trans. Ind. Electron. 2012, 59, 58–70. [Google Scholar] [CrossRef]
- Kolar, J.W.; Friedli, T.; Rodriguez, J.; Wheeler, P.W. Review of three-phase PWM AC–AC converter topologies. IEEE Trans. Ind. Electron. 2011, 58, 4988–5006. [Google Scholar] [CrossRef]
- Venturini, M. A new sine wave in sine wave out, conversion technique which eliminates reactive elements. Proc. Powercon 1980, 7, E3/1–E3/15. [Google Scholar]
- Rodriguez, J.; Silva, E.; Blaabjerg, F.; Wheeler, P.; Clare, J.; Pontt, J. Matrix converter controlled with the direct transfer function approach: Analysis, modelling and simulation. Int. J. Electron. 2005, 92, 63–85. [Google Scholar] [CrossRef]
- Huber, L.; Borojevic, D. Space vector modulated three-phase to three-phase matrix converter with input power factor correction. IEEE Trans. Ind. Appl. 1995, 6, 1234–1246. [Google Scholar] [CrossRef]
- Zhang, J.; Dorrell, D.G.; Li, L.; Guo, Y. Decoupling Controller Design and Controllable Regions Analysis for the Space Vector Modulated Matrix Converter-Unified Power Flow Controller in Transmission Systems. Electr. Power Compon. Syst. 2018, 46, 1–14. [Google Scholar] [CrossRef]
- Casadei, D.; Serra, G.; Tani, A. The use of matrix converters in direct torque control of induction machines. IEEE Trans. Ind. Electron. 2001, 48, 1057–1064. [Google Scholar] [CrossRef]
- Ortega, C.; Arias, A.; Caruana, C.; Balcells, J.; Asher, G. Improved waveform quality in the direct torque control of matrix-converter-fed PMSM drives. IEEE Trans. Ind. Electron. 2010, 57, 2101–2110. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Zhang, L.; Dorrell, D.G. Hysteresis Band Current Controller based Field-Oriented Control for an Induction Motor driven by a Direct Matrix Converter. In Proceedings of the 43rd Annual Conference of the IEEE Industrial Electronics Society (IECON 2017), Beijing, China, 29 October–1 November 2017; pp. 4633–4638. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, H.; Wang, T.; Li, L.; Dorrell, D.G.; Lu, D.D.C. Field-Oriented Control based on Hysteresis Band Current Controller for a Permanent Magnet Synchronous Motor driven by a Direct Matrix Converter. IET Power Electron. 2018, 11, 1277–1285. [Google Scholar] [CrossRef]
- Rivera, M.; Rojas, C.; Rodriguez, J.; Wheeler, P.; Wu, B.; Espinoza, J.R. Predictive current control with input filter resonance mitigation for a direct matrix converter. IEEE Trans. Power Electron. 2011, 26, 2794–2803. [Google Scholar] [CrossRef]
- Wang, L.; Dan, H.; Zhao, Y.; Zhu, Q.; Peng, T.; Sun, Y.; Wheeler, P. A finite control set model predictive control method for matrix converter with zero common-mode voltage. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 327–338. [Google Scholar] [CrossRef]
- Zhang, J.; Li, L.; Malekjamshidi, Z.; Dorrell, D.G. Predictive Voltage Control of Direct Matrix Converter with Reduced Number of Sensors for the Renewable Energy and Microgrid Applications. In Proceedings of the IEEE Energy Conversion Congress Exposition (ECCE), Cincinnati, OH, USA, 1–5 October 2017; pp. 3309–3315. [Google Scholar] [CrossRef]
- Rivera, M.; Wilson, A.; Rojas, C.A.; Rodriguez, J.; Espinoza, J.R.; Wheeler, P.W.; Empringham, L. A comparative assessment of model predictive current control and space vector modulation in a direct matrix converter. IEEE Trans. Ind. Electron. 2013, 60, 578–588. [Google Scholar] [CrossRef]
- Vazquez, S.; Leon, J.I.; Franquelo, L.G.; Rodriguez, J.; Young, H.A.; Marquez, A.; Zanchetta, P. Model predictive control: A review of its applications in power electronics. IEEE Ind. Electron. Mag. 2014, 8, 16–31. [Google Scholar] [CrossRef]
- Hu, S.; Liu, G.; Jin, N.; Guo, L. Constant-Frequency Model Predictive Direct Power Control for Fault-Tolerant Bidirectional Voltage-Source Converter with Balanced Capacitor Voltage. Energies 2018, 11, 2692. [Google Scholar] [CrossRef]
- Rodriguez, J.; Kazmierkowski, M.P.; Espinoza, J.R.; Zanchetta, P.; Abu-Rub, H.; Young, H.A.; Rojas, C.A. State of the art of finite control set model predictive control in power electronics. IEEE Trans. Ind. Inform. 2013, 9, 1003–1016. [Google Scholar] [CrossRef]
- Norambuena, M.; Rodriguez, J.; Zhang, Z.; Wang, F.; Garcia, C.; Kennel, R. A Very Simple Strategy for High Quality Performance of AC Machines Using Model Predictive Control. IEEE Trans. Power Electron. 2018. [Google Scholar] [CrossRef]
- Cortés, P.; Kouro, S.; La Rocca, B.; Vargas, R.; Rodríguez, J.; León, J.I.; Vazquez, S.; Franquelo, L.G. Guidelines for weighting factors design in model predictive control of power converters and drives. IEEE Int. Conf. Ind. Technol. 2009, 1–7. [Google Scholar] [CrossRef]
- Rojas, C.A.; Rodriguez, J.; Villarroel, F.; Espinoza, J.R.; Silva, C.A.; Trincado, M. Predictive torque and flux control without weighting factors. IEEE Trans. Ind. Electron. 2013, 60, 681–690. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, H. Two-vector-based model predictive torque control without weighting factors for induction motor drives. IEEE Trans. Power Electron. 2016, 31, 1381–1390. [Google Scholar] [CrossRef]
- Zanchetta, P. Heuristic multi-objective optimization for cost function weights selection in finite states model predictive control. In Proceedings of the IEEE Workshop Predictive Control Electrical Drives Power Electron, Munich, Germany, 14–15 October 2011; pp. 70–75. [Google Scholar] [CrossRef]
- Davari, S.; Khaburi, D.A.; Kennel, R. An improved FCS–MPC algorithm for an induction motor with an imposed optimized weighting factor. IEEE Trans. Power Electron. 2012, 27, 1540–1551. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Manufacturers | Product/Model | Max. Voltage | Max. Power | Target Application | Other Information/Feature |
|---|---|---|---|---|---|
| Yaskawa | FSDrive-MX1S | 6.6 kV | 6 MVA | motor drive | energy-saving |
| Yaskawa | U1000 | 480 V | 800 HP | motor drive | full regeneration, ultra-low harmonics |
| Yaskawa | AC7 | 480 V | 250 HP | motor drive | legacy product |
| Yaskawa | Z1000U | 480 V | 350 HP | HVAC applications | low input distortion |
| Eupec | ECONOMAC FM35R12KE3ENG | 1200 V | 42 kVA | unspecified | module |
| Fuji | FRENIC-Mx | 400 V | 45 kW | general industrial machines | best suitable for elevators and cranes |
| Features | Venturini Control | Space Vector Modulation | Direct Torque Control | Predictive Control | Hysteresis Control |
|---|---|---|---|---|---|
| Complexity | low | high | medium | low | very low |
| Sampling Frequency | very low | low | very high | high | high |
| Switching Frequency | very low | low | high | high | high |
| Dynamic Response | good | good | fast | very fast | very fast |
| Application Range | narrow | wide | narrow | very wide | medium |
| vs [Vpk-pk] | fs [Hz] | LA [mH] | CA [μF] | RA [Ω] | RL [Ω] | LL [mH] | fo [Hz] | Q* [VAr] | Ts [μs] |
|---|---|---|---|---|---|---|---|---|---|
| 100 | 50 | 6.8 | 10 | 0.5 | 15 | 14 | 60 | 0 | 100 |
| Methods | Ts | Avg. Switching Frequency | Weighting Factor | Output Current THD | Input Power Factor |
|---|---|---|---|---|---|
| MPC | 100 μs | 2.038 kHz | 0.0008 | 4.07% | 0.997 |
| SMPC1 | 100 μs | 1.89 kHz | none | 3.95% | 0.996 |
| SMPC2 | 80 μs | 2.37 kHz | none | 3.31% | 0.997 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Norambuena, M.; Li, L.; Dorrell, D.; Rodriguez, J. Sequential Model Predictive Control of Three-Phase Direct Matrix Converter. Energies 2019, 12, 214. https://doi.org/10.3390/en12020214
Zhang J, Norambuena M, Li L, Dorrell D, Rodriguez J. Sequential Model Predictive Control of Three-Phase Direct Matrix Converter. Energies. 2019; 12(2):214. https://doi.org/10.3390/en12020214
Chicago/Turabian StyleZhang, Jianwei, Margarita Norambuena, Li Li, David Dorrell, and Jose Rodriguez. 2019. "Sequential Model Predictive Control of Three-Phase Direct Matrix Converter" Energies 12, no. 2: 214. https://doi.org/10.3390/en12020214
APA StyleZhang, J., Norambuena, M., Li, L., Dorrell, D., & Rodriguez, J. (2019). Sequential Model Predictive Control of Three-Phase Direct Matrix Converter. Energies, 12(2), 214. https://doi.org/10.3390/en12020214