Obstacle Avoidance Path Planning Design for Autonomous Driving Vehicles Based on an Improved Artificial Potential Field Algorithm


Abstract
:1. Introduction
1.1. Background and Previous Works
1.2. The Organizztions
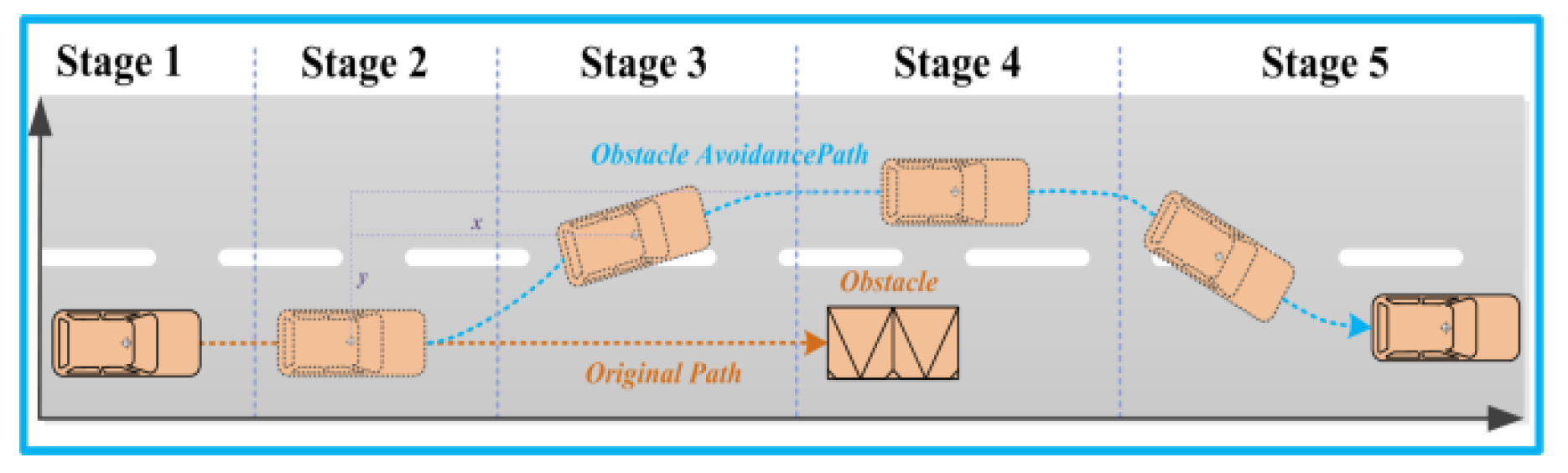
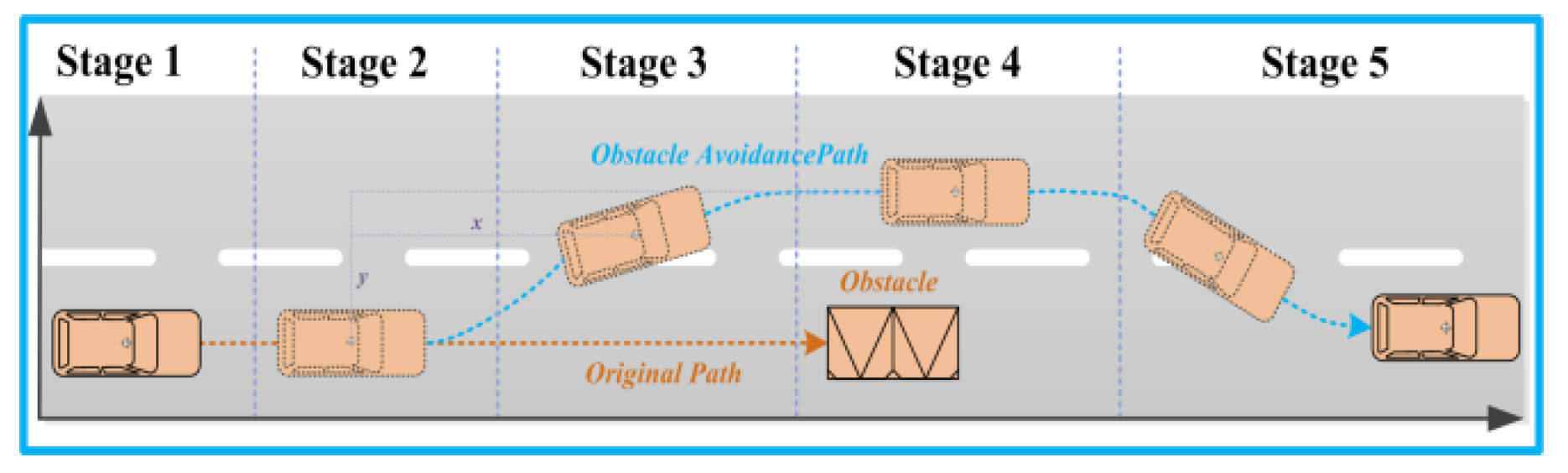
2. Description of Obstacle Avoidance Maneuver
2.1. Analysis of Obstacle Avoidance Process
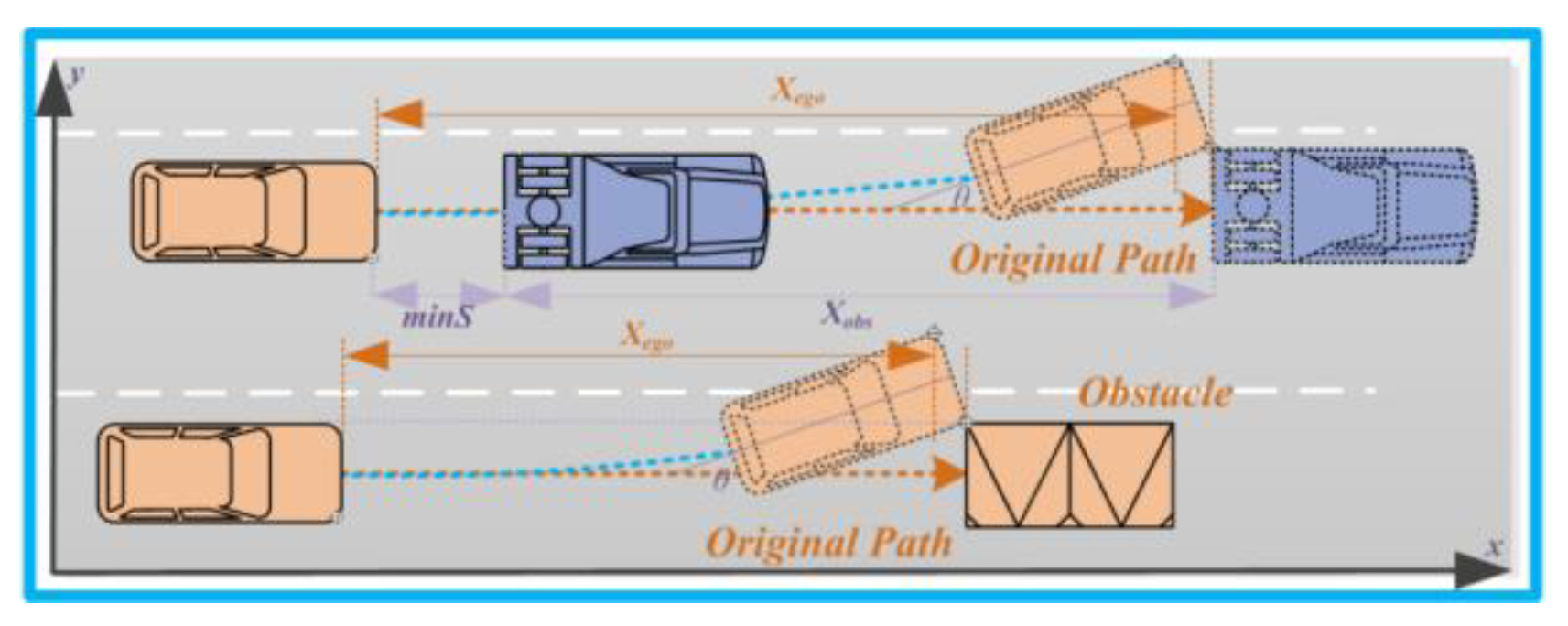
2.2. Safety Model of Obstacle Avoidance
3. Obstacle Avoidance Path Planning Based on Artificial Potential Field Method
3.1. Design of Artificial Potential Field
3.2. Constraint Analysis for Obstacle Avoidance Path
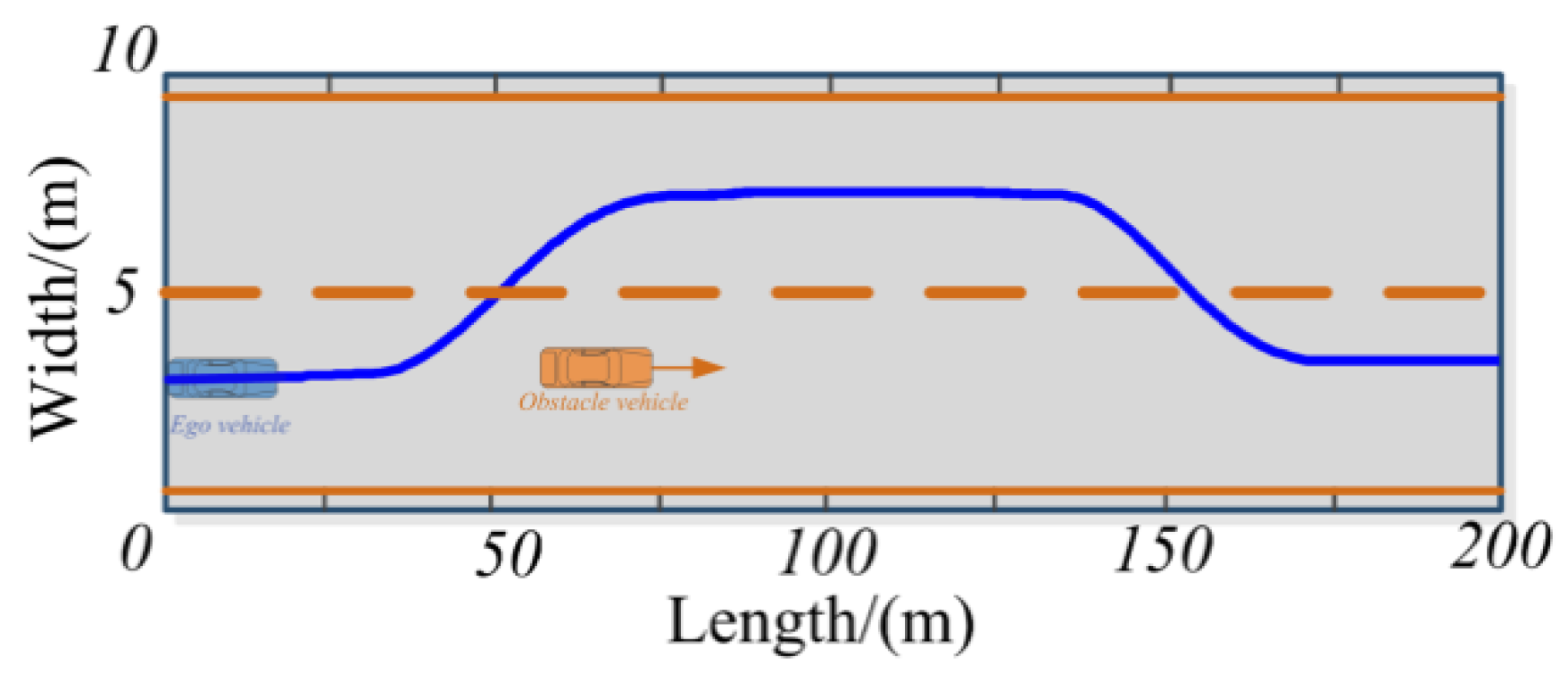
4. Simulation Test
5. Real Vehicle Test
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, X.; Sun, Z.; Cao, D.; He, Z.; Zhu, Q. Real-Time Trajectory Planning for Autonomous Urban Driving: Framework, Algorithms, and Verifications. IEEE/ASME Trans. Mechatron. 2016, 21, 740–753. [Google Scholar] [CrossRef]
- Lee, U.; Yoon, S.; Shim, H.; Vasseur, P.; Demonceaux, C. Local path planning in a complex environment for self-driving car. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Hong Kong, China, 4–7 June 2014. [Google Scholar]
- Katrakazas, C.; Quddus, M.; Chen, W.-H.; Deka, L. Real-time motion planning methods for autonomous on-road driving: State-of-the-art and future research directions. Transp. Res. Part C 2015, 60, 416–442. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, X.; Li, L.; Cheng, S.; Chen, Z. A Novel Lane Change Decision-Making Model of Autonomous Vehicle Based on Support Vector Machine. IEEE Access 2019, 26543–26550. [Google Scholar] [CrossRef]
- Chen, H.; Xiong, G.; Gong, J. Introduction to Self-Driving Car; Beijing Institute of Technology Press: Beijing, China, 2014. [Google Scholar]
- Wang, P.; Gao, S.; Li, L.; Cheng, S.; Zhao, L. Automatic steering control strategy for unmanned vehicles based on Robust Backstepping sliding mode control theory. IEEE Access 2019, 7, 64984–64992. [Google Scholar] [CrossRef]
- Gong, J.; Jiang, Y.; Xu, W. Model Predictive Control for Self-Driving Vehicle; Beijing Institute of Technology Press: Beijing, China, 2014. [Google Scholar]
- López, A.; Chaumette, F.; Marchand, E.; Pettré, J. Character navigation in dynamic environments based on optical flow. Comput. Gr. Forum 2019, 38, 181–192. [Google Scholar] [CrossRef] [Green Version]
- Fu, X.; Jiang, Y.; Huang, D.; Huang, K.; Wang, J.; Lu, G. A novel real-time trajectory planning algorithm for intelligent vehicles. Control Decis. 2015, 30, 1751–1758. [Google Scholar]
- Xiu, C.; Chen, H. A Research on Local Path Planning for Autonomous Vehicles Based on Improved APF Method. Automot. Eng. 2013, 35, 808–811. [Google Scholar]
- Wang, S.; Zhang, J.; Liu, Z. A Research on Overtaking Lane Planning for Intelligent Vehicles Based on Improved Artificial Potential Field Method. Automob. Technol. 2018, 3, 5–9. [Google Scholar]
- Luo, Y.; Xiang, Y.; Cao, K.; Li, K. A dynamic automated lane change maneuver based on vehicle-to-vehicle communication. Transp. Res. Part C 2016, 62, 87–102. [Google Scholar] [CrossRef]
- Ji, J.; Ji, P.; P, H.; Li, Y. Design of 3D Virtual Dangerous Potential Field for Vehicle Active Collision Avoidance. Automot. Eng. 2016, 38, 1065–1071. [Google Scholar]
- Melek, W.W.; Ji, J.; Khajepour, A.; Huang, Y. Path Planning and Tracking for Vehicle Collision Avoidance Based on Model Predictive Control with Multiconstraints. IEEE Trans. Veh. Technol. 2017, 66, 952–964. [Google Scholar]
- Hong, W.; Yanjun, H.; Amir, K.; Teng, L.; Yechen, Q.; Yubiao, Z. Local Path Planning for Autonomous Vehicles: Crash Mitigation. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1062–1067. [Google Scholar]
- Chen, Y.; Peng, H.; Grizzle, J. Obstacle Avoidance for Low-Speed Autonomous Vehicles with Barrier Function. IEEE Trans. Control Syst. Technol. 2018, 26, 194–206. [Google Scholar] [CrossRef]
- Llorca, D.F.; Milanes, V.; Alonso, I.P.; Gavilan, M.; Daza, I.G.; Perez, J.; Sotelo, M. Autonomous Pedestrian Collision Avoidance Using a Fuzzy Steering Controller. IEEE Trans. Intell. Transp. Syst. 2011, 12, 390–401. [Google Scholar] [CrossRef] [Green Version]
- Stéphanie, L.; Vasquez, D.; Laugier, C. A survey on motion prediction and risk assessment for intelligent vehicles. Robomech J. 2014, 1, 1. [Google Scholar] [Green Version]
- Wang, J.; Wu, J.; Li, Y. The Driving Safety Field Based on Driver–Vehicle–Road Interactions. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2203–2214. [Google Scholar] [CrossRef]
- Wang, B. Obstacle Avoidance Threat Assessment and Trajectory Planning of Intelligent Vehicle. Automot. Eng. 2018, 6, 33–37. [Google Scholar]
- Tang, Z.; Ji, J.; Wu, M.; Fang, J.; Chen, M. Vehicles Path Planning and Tracking Based on an Improved Artificial Potential Field Method. J. Southwest Univ. 2018, 40, 174–182. [Google Scholar]
- Paleti, R.; Eluru, N.; Bhat, R. Examining the influence of aggressive driving behavior on driver injury severity in traffic crashes. Accid. Anal. Prev. 2010, 42, 1839–1854. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Z.; Han, J.; Ni, J. A Research on Adaptive Lane Change Warning Algorithm Based on Driver Characteristics. Automot. Eng. 2019, 41, 440–446. [Google Scholar]
- Wang, J.; Wu, J.; Li, Y. Concept, Principle and Modeling of Driving Risk Field Based on Driver-vehicle-road Interaction. China J. Highw. Transp. 2016, 29, 105–114. [Google Scholar]
- An, L.; Chen, T.; Cheng, A.; Fang, W. A Simulation on the Path Planning of Intelligent Vehicles Based on Artificial Potential Field Algorithm. Automot. Eng. 2017, 39, 1451–1456. [Google Scholar]
- Wahid, N.; Zamzuri, H.; Rahman, M.A.A.; Kuroda, S.; Raksincharoensak, P. Study on potential field based motion planning and control for automated vehicle collision avoidance systems. In Proceedings of the IEEE International Conference on Mechatronics, Churchill, VIC, Australia, 13–15 February 2017. [Google Scholar]
- Rasekhipour, Y.; Khajepour, A.; Chen, S.-K.; Litkouhi, B. A Potential Field-Based Model Predictive Path-Planning Controller for Autonomous Road Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1255–1267. [Google Scholar] [CrossRef]
- Pan, Z.; Li, J.Q.; Hu, K.M.; Zhu, H. Intelligent Vehicle Path Planning Based on Improved Artificial Potential Field Method. Appl. Mech. Mater. 2015, 742, 6. [Google Scholar] [CrossRef]
- Yu, Z. Automobile Theory, 5th ed.; China Machine Press: Beijing, China, 2009. [Google Scholar]
- Wu, J.; Cheng, S.; Liu, B.; Liu, C. A Human-Machine-Cooperative-Driving Controller Based on AFS and DYC for Vehicle Dynamic Stability. Energies 2017, 10, 1737. [Google Scholar] [CrossRef]
- Feng, J.; Bao, C.; Wu, J.; Cheng, S.; Xu, G.; Liu, S. Research on Methods of Active Steering Control Based on Receding Horizon Control. Energies 2018, 11, 2243. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameter | Value/(units) |
|---|---|
| Vehicle mass | 1530/(kg) |
| Yaw inertia | 2310/(kg·m2) |
| Cornering stiffness of front wheel | 67/(kN/rad) |
| Cornering stiffness of rear wheel | 63/(kN/rad) |
| Distance from center of mass to front wheel | 1.12/(m) |
| Distance from center of mass to rear wheel | 1.68/(m) |
| Driver response time | 0.6/(s) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Gao, S.; Li, L.; Sun, B.; Cheng, S. Obstacle Avoidance Path Planning Design for Autonomous Driving Vehicles Based on an Improved Artificial Potential Field Algorithm. Energies 2019, 12, 2342. https://doi.org/10.3390/en12122342
Wang P, Gao S, Li L, Sun B, Cheng S. Obstacle Avoidance Path Planning Design for Autonomous Driving Vehicles Based on an Improved Artificial Potential Field Algorithm. Energies. 2019; 12(12):2342. https://doi.org/10.3390/en12122342
Chicago/Turabian StyleWang, Pengwei, Song Gao, Liang Li, Binbin Sun, and Shuo Cheng. 2019. "Obstacle Avoidance Path Planning Design for Autonomous Driving Vehicles Based on an Improved Artificial Potential Field Algorithm" Energies 12, no. 12: 2342. https://doi.org/10.3390/en12122342