A Review of the Design and Control of Free-Piston Linear Generator




Abstract
:1. Introduction
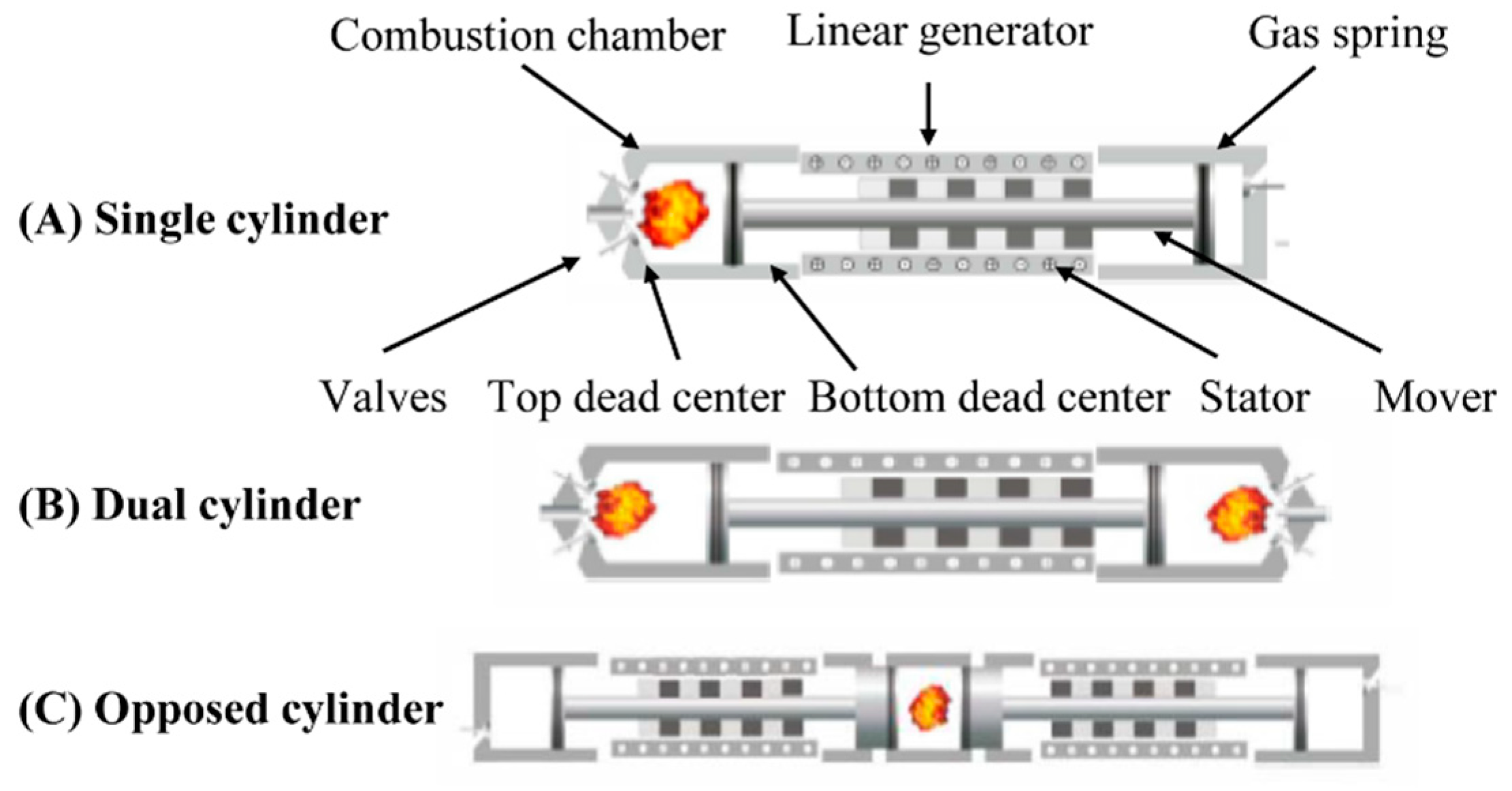
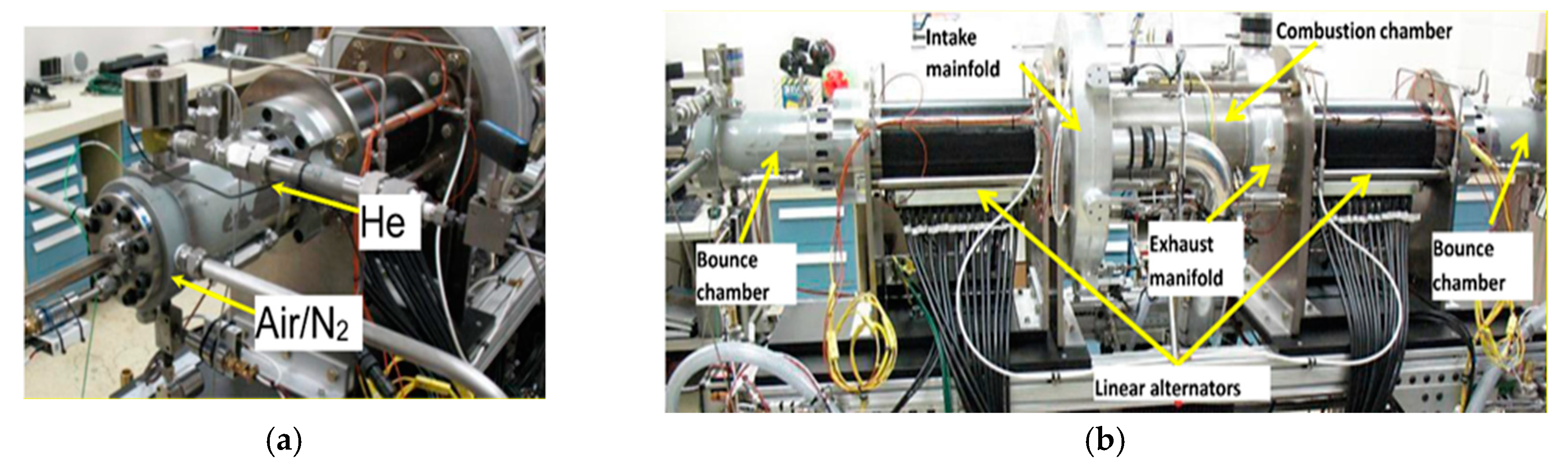
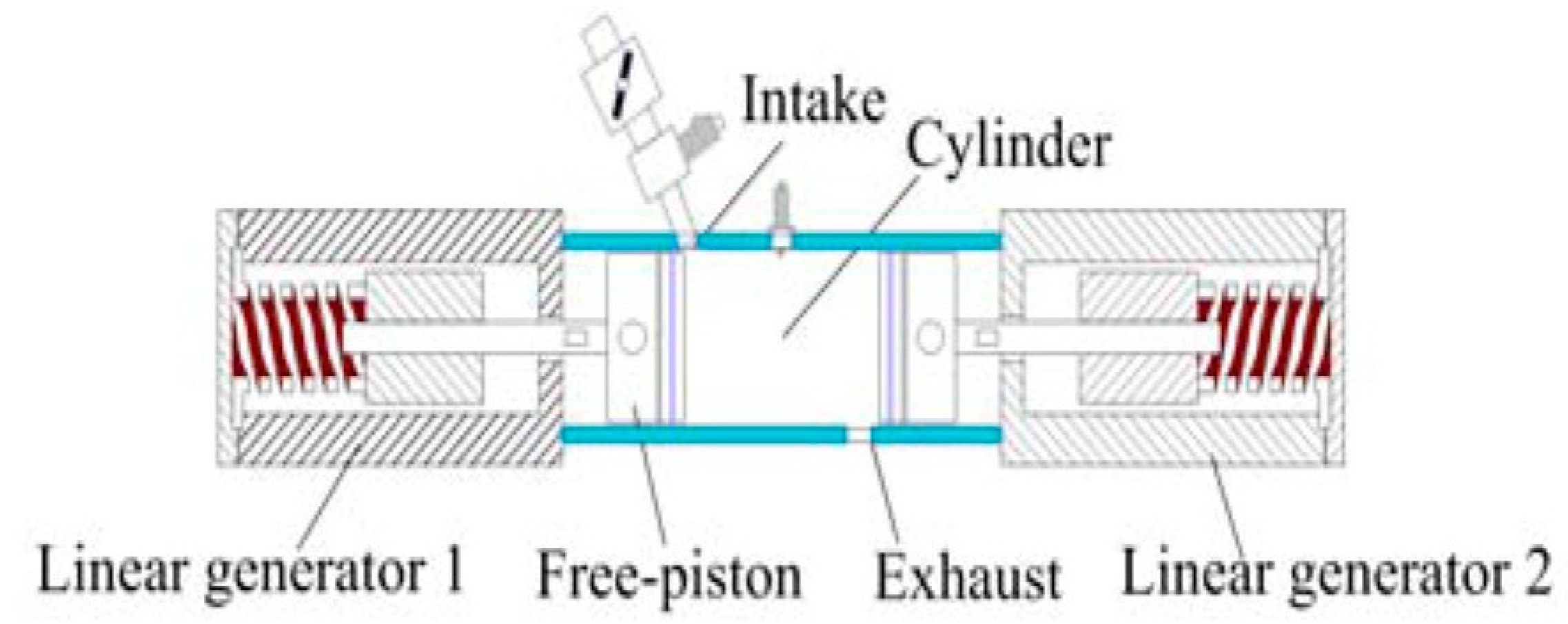
2. Basic Configuration of FPLG
3. Classification of FPLG: Different LEMs
3.1. Different Flux Type Permanent Magnet LEMs
3.2. Different Topology Structures of PMLEMs
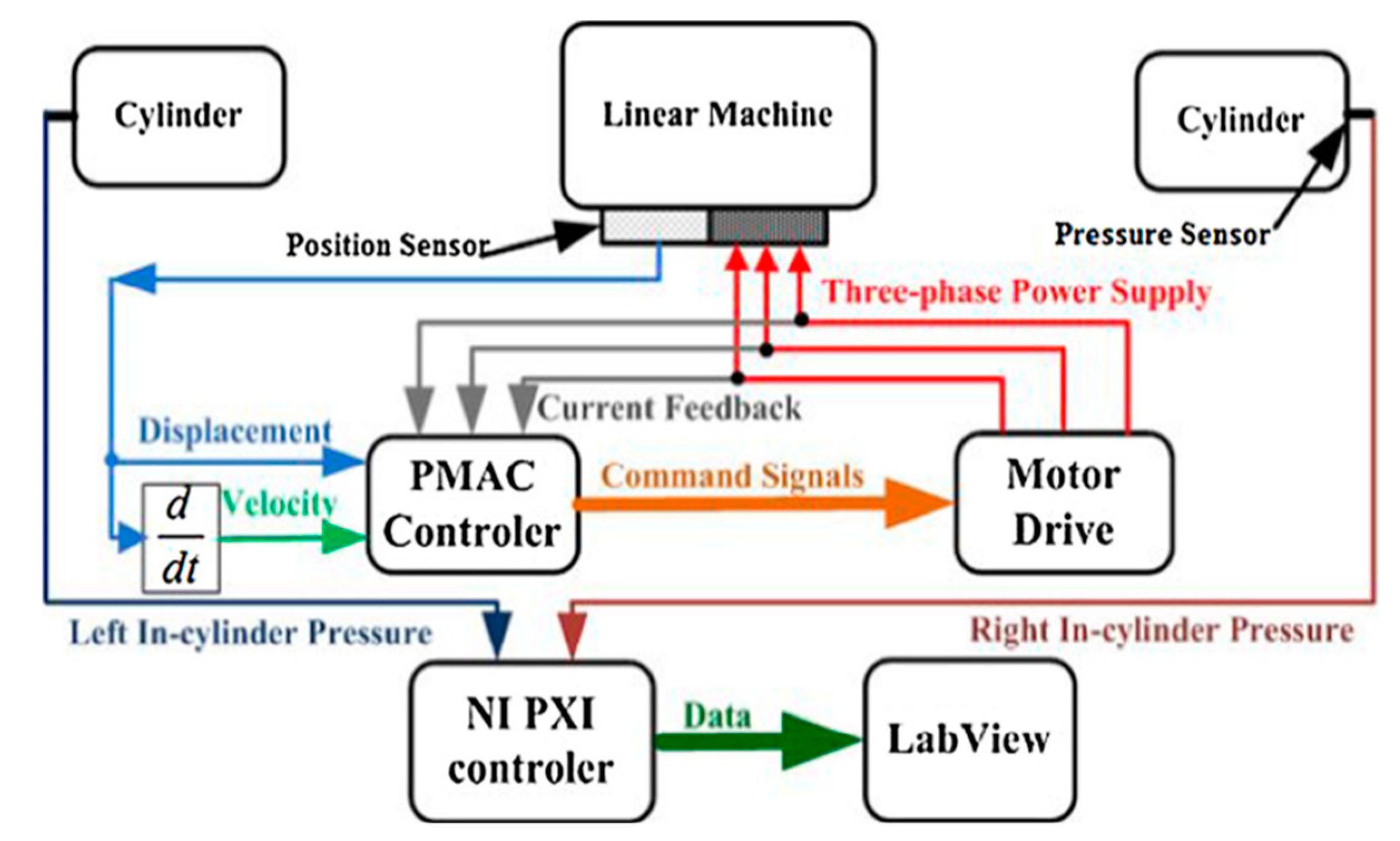
4. Piston Motion Control
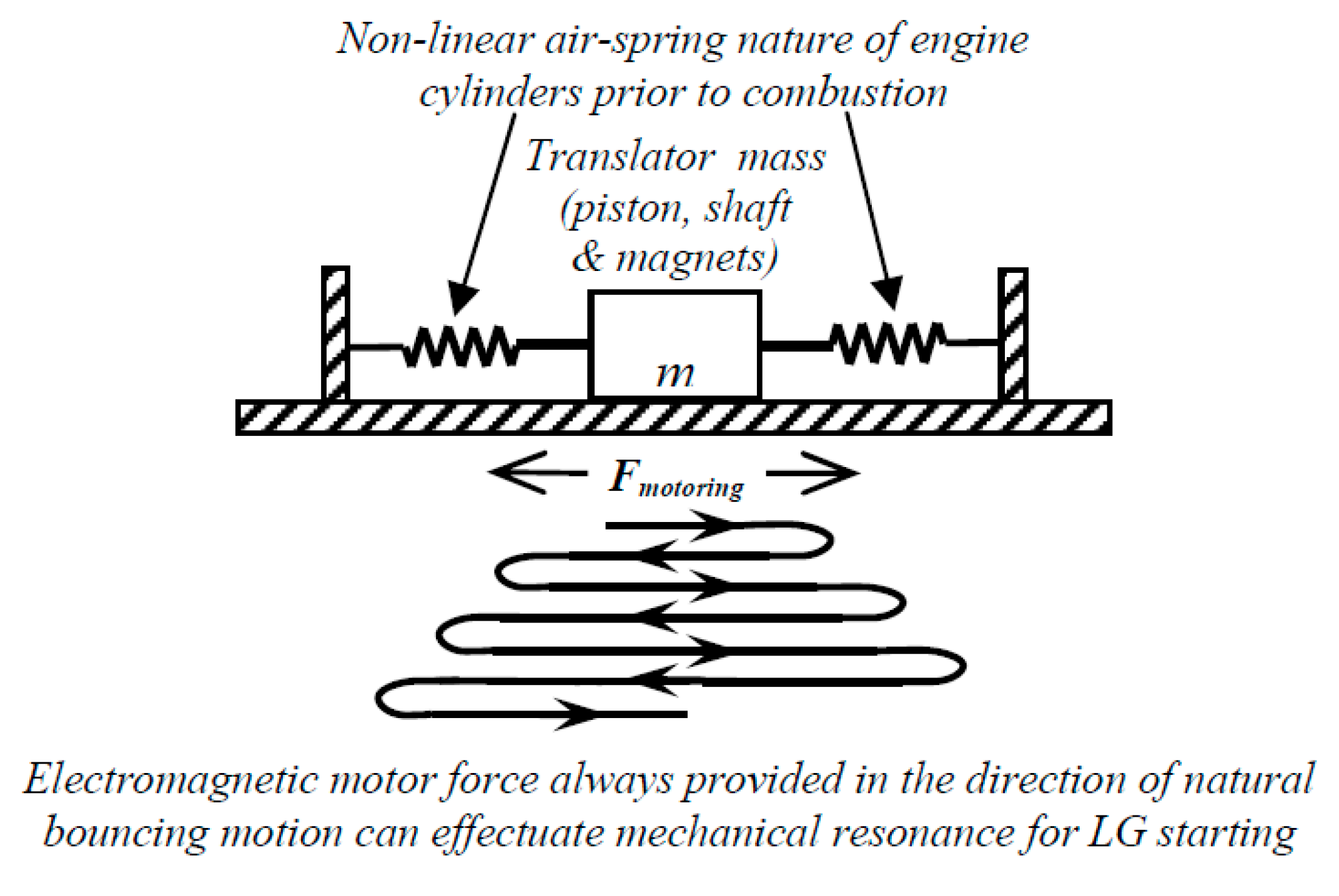
4.1. Atarting Methods of FPLGs
4.2. Piston Motion Control during Power Generation Stage
4.2.1. Active Combustion Parameters Control
4.2.2. Active LEM Control
4.2.3. The Mixed Control Strategy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moriya, K.; Goto, S.; Akita, T.; Kosaka, H.; Hotta, Y.; Nakakita, K. Development of free piston engine linear generator system part3-novel control method of linear generator for to improve efficiency and stability. SAE Tech. Pap. 2016. [Google Scholar] [CrossRef]
- Heron, A.; Rinderknecht, F. Comparison of range extender technologies for battery electric vehicles. In Proceedings of the Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–6. [Google Scholar]
- Mikalsen, R.; Roskilly, A.P. A review of free-piston engine history and applications. Appl. Therm. Eng. 2007, 27, 2339–2352. [Google Scholar] [CrossRef] [Green Version]
- Hung, N.B.; Lim, O. A review of free-piston linear engines. Appl. Energy 2016, 178, 78–97. [Google Scholar] [CrossRef]
- Zhang, C.; Li, K.; Sun, Z. Modeling of piston trajectory-based hcci combustion enabled by a free piston engine. Appl. Energy 2015, 139, 313–326. [Google Scholar] [CrossRef]
- Schneider, S.; Rinderknecht, F.; Friedrich, H.E. Design of future concepts and variants of the free piston linear generator. In Proceedings of the Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 25–27 March 2014; pp. 1–8. [Google Scholar]
- Xu, Z.; Chang, S. Prototype testing and analysis of a novel internal combustion linear generator integrated power system. Appl. Energy 2010, 87, 1342–1348. [Google Scholar] [CrossRef]
- Kosaka, H.; Akita, T.; Moriya, K.; Goto, S.; Hotta, Y.; Umeno, T.; Nakakita, K. Development of free piston engine linear generator system part 1—Investigation of fundamental characteristics. SAE Tech. Pap. 2014. [Google Scholar] [CrossRef]
- Mikalsen, R.; Roskilly, A.P. The control of a free-piston engine generator. Part 1: Fundamental analyses. Appl. Energy 2010, 87, 1273–1280. [Google Scholar] [CrossRef] [Green Version]
- Xu, Z.; Chang, S. Hierarchical hybrid control of a four-stroke free-piston engine for electrical power generation. In Proceedings of the International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 4045–4049. [Google Scholar]
- Hung, N.B.; Lim, O.; Iida, N. The effects of key parameters on the transition from si combustion to hcci combustion in a two-stroke free piston linear engine. Appl. Energy 2015, 137, 385–401. [Google Scholar] [CrossRef]
- Ferrari, C.; Friedrich, H.E. Development of a free-piston linear generator for use in an extended-range electric vehicle. In Proceedings of the EVS26 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium, Los Angeles, CA, USA, 6–9 May 2012; pp. 6–9. [Google Scholar]
- Mikalsen, R.; Roskilly, A.P. The control of a free-piston engine generator. Part 2: Engine dynamics and piston motion control. Appl. Energy 2010, 87, 1281–1287. [Google Scholar] [CrossRef] [Green Version]
- Goto, S.; Moriya, K.; Kosaka, H.; Akita, T.; Hotta, Y.; Umeno, T.; Nakakita, K. Development of free piston engine linear generator system part 2-investigation of control system for generator. SAE Tech. Pap. 2014. [Google Scholar] [CrossRef]
- Mikalsen, R.; Roskilly, A.P. Performance simulation of a spark ignited free-piston engine generator. Appl. Therm. Eng. 2008, 28, 1726–1733. [Google Scholar] [CrossRef]
- Zheng, P.; Zhu, S.; Yu, B.; Cheng, L.; Fan, Y. Analysis and optimization of a novel tubular staggered-tooth transverse-flux pm linear machine. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Johnson, T.A.; Leick, M.T.; Moses, R.W. Experimental Evaluation of the Free Piston Engine-Linear Alternator (FPLA); Sandia National Laboratories Press: Albuquerque, NM, USA, 2015. [Google Scholar]
- Zhu, Y.; Wang, Y.; Zhen, X.; Guan, S.; Wang, J.; Wu, Y.; Chen, Y.; Yin, S. The control of an opposed hydraulic free piston engine. Appl. Energy 2014, 126, 213–220. [Google Scholar] [CrossRef]
- Huang, L. An opposed-piston free-piston linear generator development for HEV. SAE Tech. Pap. 2012. [Google Scholar] [CrossRef]
- Cosic, A.; Sadarangani, C.; Leksell, M. 3D analyses of a novel transverse flux machine for a free piston energy converter, Electrical Machines. In Proceedings of the 18th International Conference on Electrical Machines, Vilamoura, Portugal, 6–9 September 2008; pp. 1–6. [Google Scholar]
- Sun, P.; Zhang, C.; Chen, J.; Zhao, F.; Liao, Y.; Yang, G.; Chen, C. Decoupling design and verification of a free-piston linear generator. Energies 2016, 9, 1067. [Google Scholar] [CrossRef]
- Rinderknecht, F. A highly efficient energy converter for a hybrid vehicle concept-focused on the linear generator of the next generation. In Proceedings of the 8th International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–7. [Google Scholar]
- Wang, J.; Baker, N.J. Comparison of flux switching and modulated pole linear machines for use with a free piston. In Proceedings of the IEEE International Electric Machines & Drives Conference (IEMDC), Coeur d’Alene, ID, USA, 10–13 May 2015; pp. 642–648. [Google Scholar]
- Tang, R. Modern Permanent Magnet Motor Theory and Design; China Machine Press: Beijing, China, 2016. [Google Scholar]
- Wang, J.; Howe, D.; Lin, Z. Comparative studies on linear motor topologies for reciprocating vapor compressors. In Proceedings of the IEEE International Electric Machines & Drives Conference, Antalya, Turkey, 3–5 May 2007; pp. 364–369. [Google Scholar]
- Wang, J.; West, M.; Howe, D.; Parra, Z.D.L.; Arshad, W.M. Design and experimental verification of a linear permanent magnet generator for a free-piston energy converter. IEEE Trans. Energy Convers. 2007, 22, 299–306. [Google Scholar] [CrossRef]
- Sun, P.; Zhang, C.; Chen, J.; Zhao, F.; Liao, Y.; Yang, G.; Chen, C. Hybrid system modeling and full cycle operation analysis of a two-stroke free-piston linear generator. Energies 2017, 10, 213. [Google Scholar] [CrossRef]
- Zheng, P.; Tong, C.; Bai, J.; Yu, B.; Sui, Y.; Shi, W. Electromagnetic design and control strategy of an axially magnetized permanent-magnet linear alternator for free-piston stirling engines. IEEE Trans. Ind. Appl. 2013, 48, 2230–2239. [Google Scholar] [CrossRef]
- Wang, J.; Howe, D. Tubular modular permanent-magnet machines equipped with quasi-halbach magnetized magnets-part i: Magnetic field distribution, emf, and thrust force. IEEE Trans. Magn. 2005, 41, 2470–2478. [Google Scholar] [CrossRef]
- Yu, B.; Zheng, P.; Xu, B.; Zhang, J.; Han, L. Flux leakage analysis of transverse-flux pm linear machine. In Proceedings of the 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014; pp. 2284–2288. [Google Scholar]
- Baker, N.J.; Wang, J.; Atkinson, G.J. Optimization and comparison of linear transverse flux and flux switching machines. In Proceedings of the 22th International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 2471–2477. [Google Scholar]
- Zhao, M.; Wei, Y.; Yang, H.; Xu, M.; Han, F.; Deng, G.; Hou, D.; Zhang, P. Development and analysis of novel flux switching transverse flux permanent magnet linear machine. IEEE Trans. Ind. Electron. 2018, 1. [Google Scholar] [CrossRef]
- Cao, R.; Cheng, M.; Mi, C.C.; Hua, W. Influence of leading design parameters on the force performance of a complementary and modular linear flux-switching permanent-magnet motor. IEEE Trans. Ind. Electr. 2014, 61, 2165–2175. [Google Scholar] [CrossRef]
- Zheng, P.; Tong, C.; Chen, G.; Liu, R.; Sui, Y.; Shi, W.; Cheng, S. Research on the magnetic characteristic of a novel transverse-flux pm linear machine used for free-piston energy converter. IEEE Trans. Magn. 2011, 47, 1082–1085. [Google Scholar] [CrossRef]
- Wang, J.; Howe, D. Tubular modular permanent-magnet machines equipped with quasi-halbach magnetized magnets-part ii: Armature reaction and design optimization. IEEE Trans. Magn. 2005, 41, 2479–2489. [Google Scholar] [CrossRef]
- Li, Q.F.; Xiao, J.; Huang, Z. Flat-type permanent magnet linear alternator: A suitable device for a free piston linear alternator. J. Zhejiang Univ.-Sci. A (Appl. Phys. Eng.) 2009, 10, 345–352. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, F.; Li, L.; Xu, Z.; Liu, L.; Yang, G.; Lian, H.; Tian, Y. A free-piston linear generator control strategy for improving output power. Energies 2018, 11, 135. [Google Scholar] [CrossRef]
- Chen, F.; Zhang, C. A novel stable control strategy of single cylinder free-piston linear generator. In Proceedings of the IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; pp. 587–592. [Google Scholar]
- Annen, K.D.; Stickler, D.B.; Woodroffe, J. Miniature Internal Combustion Engine-Generator for High Energy Density Portable Power; Aerodyne Research Inc. Press: Billerica, MA, USA, 2008. [Google Scholar]
- Feng, H.; Song, Y.; Zuo, Z.; Shang, J.; Wang, Y.; Roskilly, A. Stable operation and electricity generating characteristics of a single-cylinder free piston engine linear generator: Simulation and experiments. Energies 2015, 8, 765–785. [Google Scholar] [CrossRef]
- Robinson, M.C. Analysis and Optimization of a Dual Free Piston, Spring Assisted, Linear Engine Generator; ProQuest LLC Press, West Virginia University: West Virginia, WV, USA, 2015. [Google Scholar]
- Zulkifli, S.A.; Karsiti, M.N.; Aziz, A.R.A. Starting of a free-piston linear engine-generator by mechanical resonance and rectangular current commutation. In Proceedings of the IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; pp. 1–7. [Google Scholar]
- Eid, A.M.; Suh, K.-Y.; Choi, K.-J.; Han, H.-D.; Lee, H.-W.; Nakaoka, M. A unique starting scheme of linear-engine tubular pm linear generator system using position feedback controlled pwm inverter. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–5. [Google Scholar]
- Feng, H.; Guo, Y.; Song, Y.; Guo, C.; Zuo, Z. Study of the injection control strategies of a compression ignition free piston engine linear generator in a one-stroke starting process. Energies 2016, 9, 453. [Google Scholar] [CrossRef]
- Feng, H.; Guo, C.; Jia, B.; Zuo, Z.; Guo, Y.; Roskilly, T. Research on the intermediate process of a free-piston linear generator from cold start-up to stable operation: Numerical model and experimental results. Energy Convers. Manag. 2016, 122, 153–164. [Google Scholar] [CrossRef]
- Jia, B.; Zuo, Z.; Feng, H.; Tian, G.; Roskilly, A.P. Investigation of the starting process of free-piston engine generator by mechanical resonance. Energy Procedia 2014, 61, 572–577. [Google Scholar] [CrossRef]
- Jia, B.; Zuo, Z.; Feng, H.; Tian, G.; Smallbone, A.; Roskilly, A.P. Effect of closed-loop controlled resonance based mechanism to start free piston engine generator: Simulation and test results. Appl. Energy 2016, 164, 532–539. [Google Scholar] [CrossRef]
- Yuan, C.; Feng, H.; He, Y.; Xu, J. Motion characteristics and mechanisms of a resonance starting process in a free-piston diesel engine generator. Proc. Inst. Mech. Eng. Part A J. Power Energy 2015, 230, 206–218. [Google Scholar] [CrossRef]
- Gong, X.; Zaseck, K.; Kolmanovsky, I.; Chen, H. Modeling and predictive control of free piston engine generator. In Proceedings of the American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 4735–4740. [Google Scholar]
- Mikalsen, R.; Jones, E.; Roskilly, A.P. Predictive piston motion control in a free-piston internal combustion engine. Appl. Energy 2010, 87, 1722–1728. [Google Scholar] [CrossRef]
- Jia, B.; Mikalsen, R.; Smallbone, A.; Zuo, Z.; Feng, H.; Roskilly, A.P. Piston motion control of a free-piston engine generator: A new approach using cascade control. Appl. Energy 2016, 179, 1166–1175. [Google Scholar] [CrossRef]
- Jia, B.; Smallbone, A.; Feng, H.; Tian, G.; Zuo, Z.; Roskilly, A.P. A fast response free-piston engine generator numerical model for control applications. Appl. Energy 2016, 162, 321–329. [Google Scholar] [CrossRef]
- Němeček, P.; Vysoký, O. Control of two-stroke free-piston generator. In Proceedings of the 6th Asian Control Conference, Bali, Indonesia, 18–21 July 2006. [Google Scholar]
- Xia, H.; Pang, Y.; Grimble, M. Hybrid modelling and control of a free-piston energy converter. In Proceedings of the IEEE International Conference on Control Applications, Munich, Germany, 4–6 October 2006; pp. 373–378. [Google Scholar]
- Xu, Z.; Chang, S. Modelling and control of an internal combustion linear generator integrated power system. Int. J. Model. Ident. Control 2009, 7, 398–404. [Google Scholar] [CrossRef]
- Xu, Z.; Chang, S. Improved moving coil electric machine for internal combustion linear generator. IEEE Trans. Energy Convers. 2010, 25, 281–286. [Google Scholar]
- Xu, Z. Research on Internal Combustion-Linear Generator Intergrated Power System and Its Implementaion. Ph.D. Thesis, Nanjing University of Science & Technology, Nanjing, China, 2010. [Google Scholar]
- Xu, F.; Chen, H.; Gong, X.; Mei, Q. Fast nonlinear model predictive control on fpga using particle swarm optimization. IEEE Trans. Ind. Electron. 2016, 63, 310–321. [Google Scholar] [CrossRef]
- Gong, X.; Hu, Y.; Yang, R.; Chen, H. Piston motion control of free piston engine based on iterative reference governor. Control Theor. Appl. 2017, 34, 188–196. [Google Scholar]
- Gong, X.; Zaseck, K.; Kolmanovsky, I.; Chen, H. Dual-loop control of free piston engine generator. IFAC-PapersOnLine 2015, 48, 174–180. [Google Scholar] [CrossRef]
- Gong, X. Modeling and Optimal Control of free Piston Engine. Ph.D. Thesis, Jilin University, Jilin, China, 2016. [Google Scholar]
- Yang, R.; Gong, X.; Hu, Y.; Chen, H. Motion control of free piston engine generator based on LQR. In Proceedings of the 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 8091–8096. [Google Scholar]
- Li, K.; Sadighi, A.; Sun, Z. Active motion control of a hydraulic free piston engine. IEEE/ASME Trans. Mechatron. 2014, 19, 1148–1159. [Google Scholar] [CrossRef]
- Li, K.; Zhang, C.; Sun, Z. Precise piston trajectory control for a free piston engine. Control. Eng. Pract. 2015, 34, 30–38. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, Z. Using variable piston trajectory to reduce engine-out emissions. Appl. Energy 2016, 170, 403–414. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Chen, F.; Zhu, R.; Yang, G.; Zhang, C. A Review of the Design and Control of Free-Piston Linear Generator. Energies 2018, 11, 2179. https://doi.org/10.3390/en11082179
Wang X, Chen F, Zhu R, Yang G, Zhang C. A Review of the Design and Control of Free-Piston Linear Generator. Energies. 2018; 11(8):2179. https://doi.org/10.3390/en11082179
Chicago/Turabian StyleWang, Xuezhen, Feixue Chen, Renfeng Zhu, Guilin Yang, and Chi Zhang. 2018. "A Review of the Design and Control of Free-Piston Linear Generator" Energies 11, no. 8: 2179. https://doi.org/10.3390/en11082179