1. Introduction
Algeria has embarked on the renewable energies path to provide global and sustainable solutions to the environmental challenges and the problems of preserving fossil energy resources through the launch of an ambitious development program. The Algerian potential for renewable energy is strongly dominated by solar energy [
1]. Algeria considers this energy source as an opportunity and a lever for economic and social development, particularly through the establishment of wealth and job-creating industries [
2].
Hybrid power systems such as Photovoltaic Generator-Diesel Generator (PVG-DG) are among the most promising microgrids for the production of electric energy for remote areas in Algeria. In remote locations with access difficulties to the power grid, stand-alone DG are traditionally the often used systems for a wide range of applications [
3], such as military applications and manufacturing facilities [
4]. In a PVG-DG-based microgrid, the generated power is strongly dependent on weather conditions. This dependency will affect energy balance and may lead to supply disruptions. To deal with these issues, an energy storage system (ESS) is generally added to the microgrid. It is one of the best solution to ensure the reliability and power quality of the hybrid power systems (PVG-DG) and favors the increased penetration of the PVG [
5,
6,
7,
8]. Most applications of the PVG-DG-ESS-based microgrid are for stand-alone operations, where the main control target is to balance local loads [
9]. This type of system offers then interesting perspectives and advantages for isolated sites with a high solar potential [
10,
11].
In this microgrid context, the literature deals with many control strategies. For hybrid PV-diesel autonomous power system, a control approach has been presented in [
12] and [
13] for a single-phase and three-phase system, respectively. In both cases, the DG is kept operational because the system does not use an ESS. In [
14], a control strategy has been proposed for a PVG-DG-FESS ship power system, where the stability analyses of the system are discussed. In [
15], it is proposed a new control method for the PVG-DG-ESS-based microgrid. It simply uses fuzzy logic to generate the PV output power command. The proposed method is compared with the conventional maximum power point (MPP) control considering two cases with and without an ESS, where the interest was in the frequency deviation. In the same context, [
16] proposes a frequency and voltage control strategy for a stand-alone microgrid with high penetration of intermittent renewable generation systems. In this case, a battery energy storage system (BESS) was connected to the AC bus through an inverter and instead of a DG, the BESS is used to generate the nominal frequency, making the system frequency independent of the mechanical inertia of a synchronous generator.
In light of the existing complementarity in these systems between the developed control strategies and the Energy Management Control (EMC), several authors have proposed an EMC in order to prove the effectiveness of the developed control strategies [
17,
18,
19,
20]. An interesting EMC for a PVG-DG-ESS-based microgrid has been proposed in [
18], where the behavior of each element of the microgrid has been tested in three operation modes (normal operation, PV power limitation, and DG mode). In this context, during normal operation, the DG is not connected and the ESS absorbs the difference between generation and consumption. However, in the proposed management algorithm, the authors were only interested in the management of the power flow. The control strategies associated to the system different power converters, mainly during the DG solicitation periods, were not presented.
Most of the above-presented energy management techniques need the DG to be often maintained operationally in order to avoid the turn On/Off issue as well as the transitional regimes from one mode to another. Moreover, the required conditions to switch from a mode to another and the system components behavior in each mode were not sufficiently detailed except in [
21,
22,
23,
24]. Indeed, in [
21] and [
22], a smooth transition control strategy between stand-alone and grid-connected modes has been proposed for single-phase voltage-source and micro-grid system, respectively. The synchronization issue has been well studied in both cases but for a DG-free system. For a grid connected hybrid system, a neuro-fuzzy controller has been proposed in [
23] to ensure a smooth transition between islanded modes to the grid-connected mode. In [
24], a seamless control methodology for the transition between the two modes is also proposed. However, in these two proposals, the DG was also kept operational in all dealt with scenarios. Whenever a DG is used, it can be forced to operate to its nominal power for a higher efficiency, resulting in an increased lifetime, lower maintenance, and fuel consumption [
18].
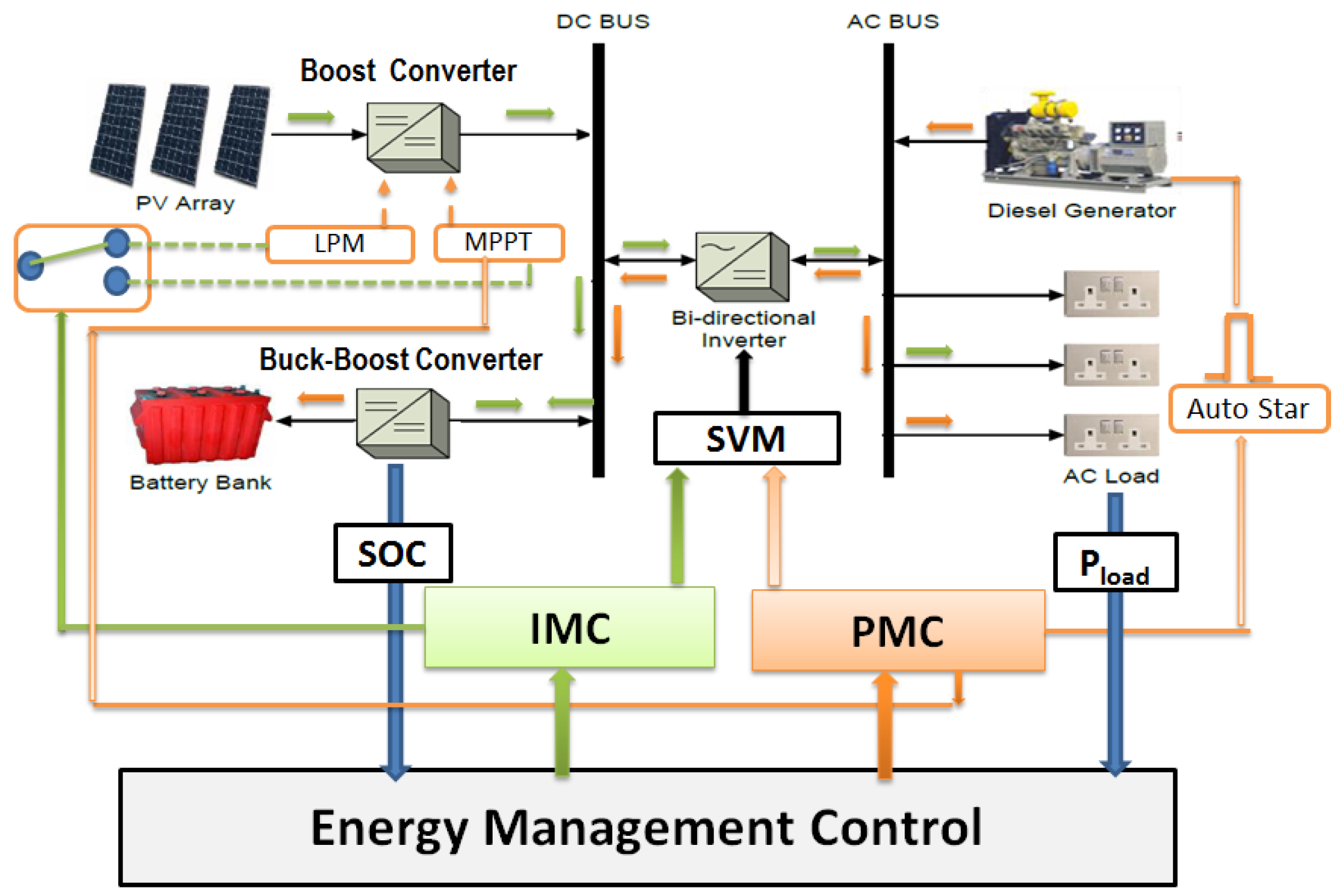
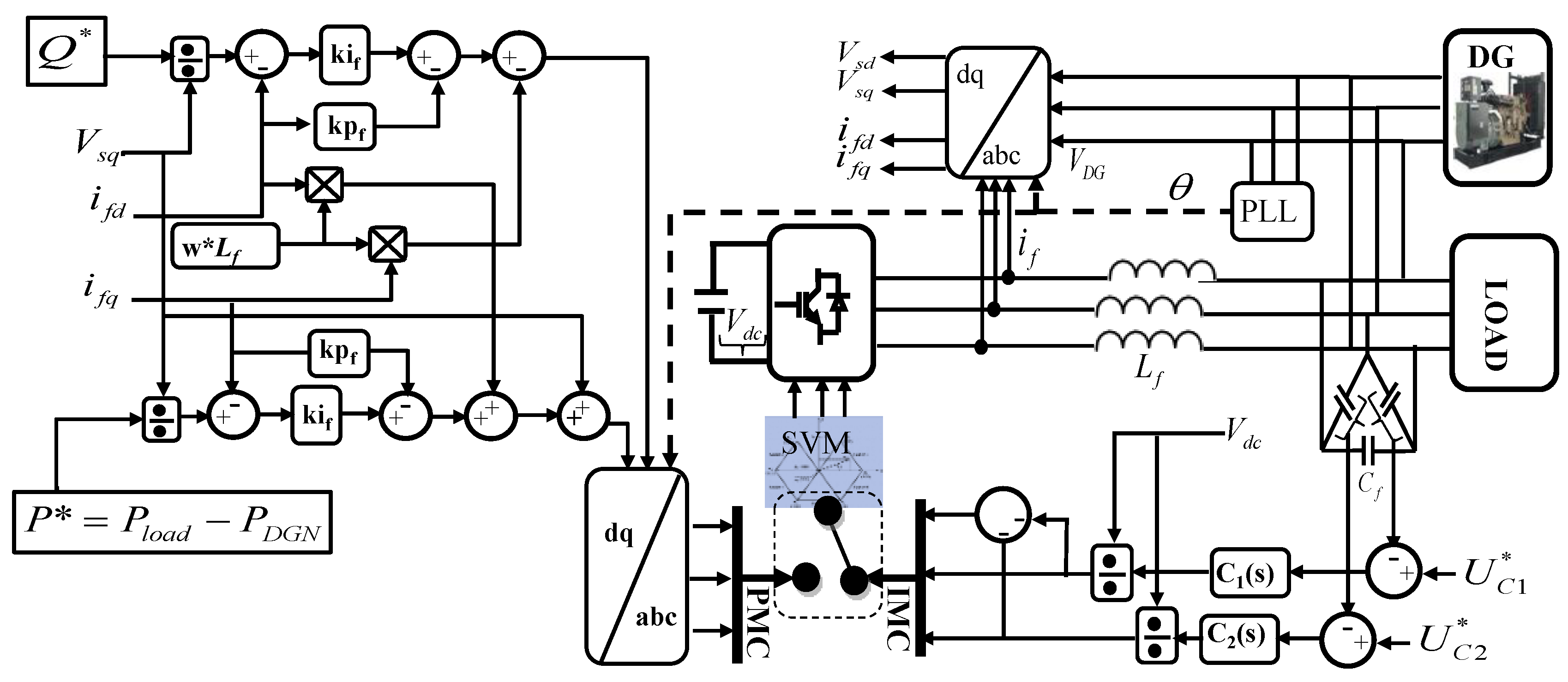
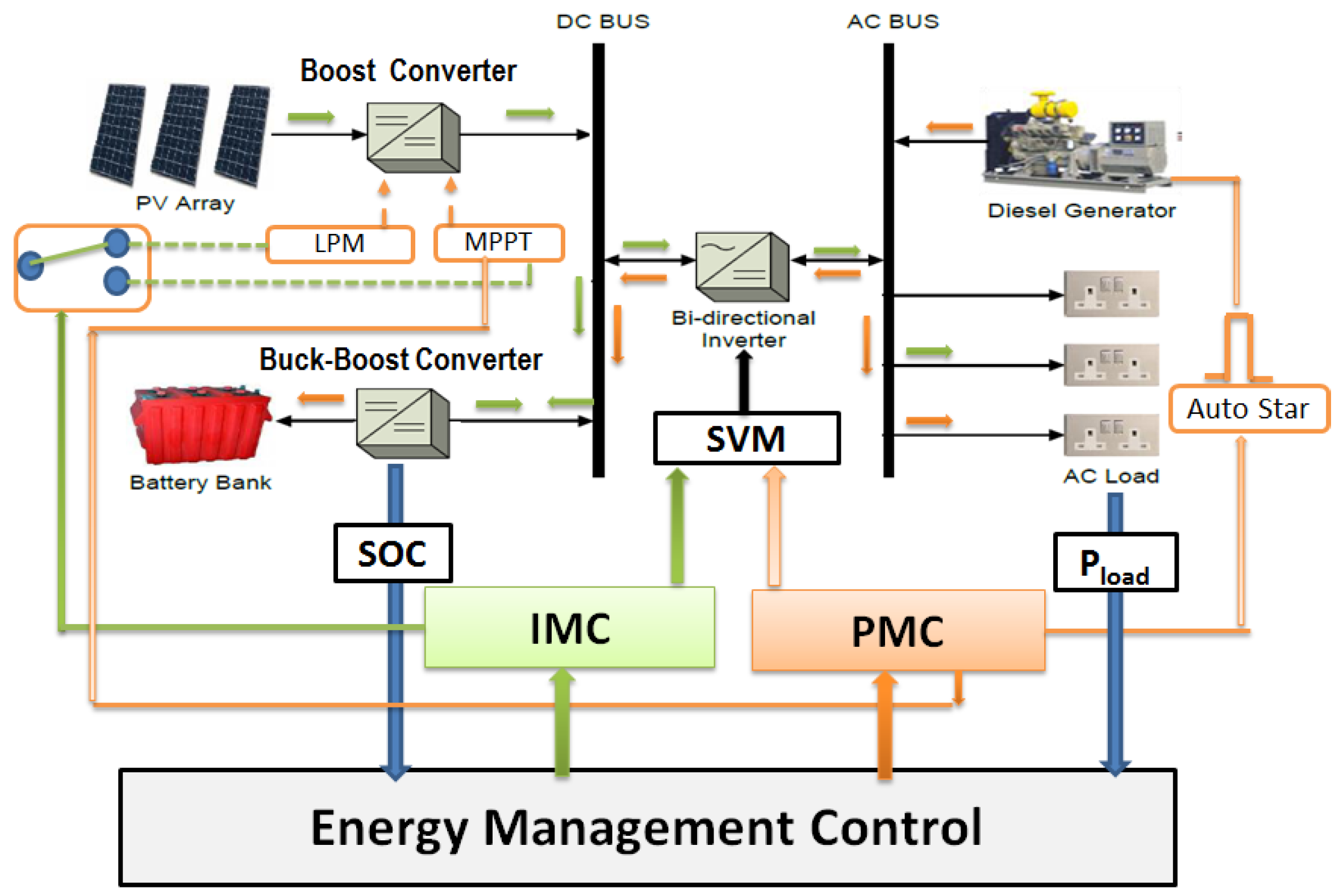
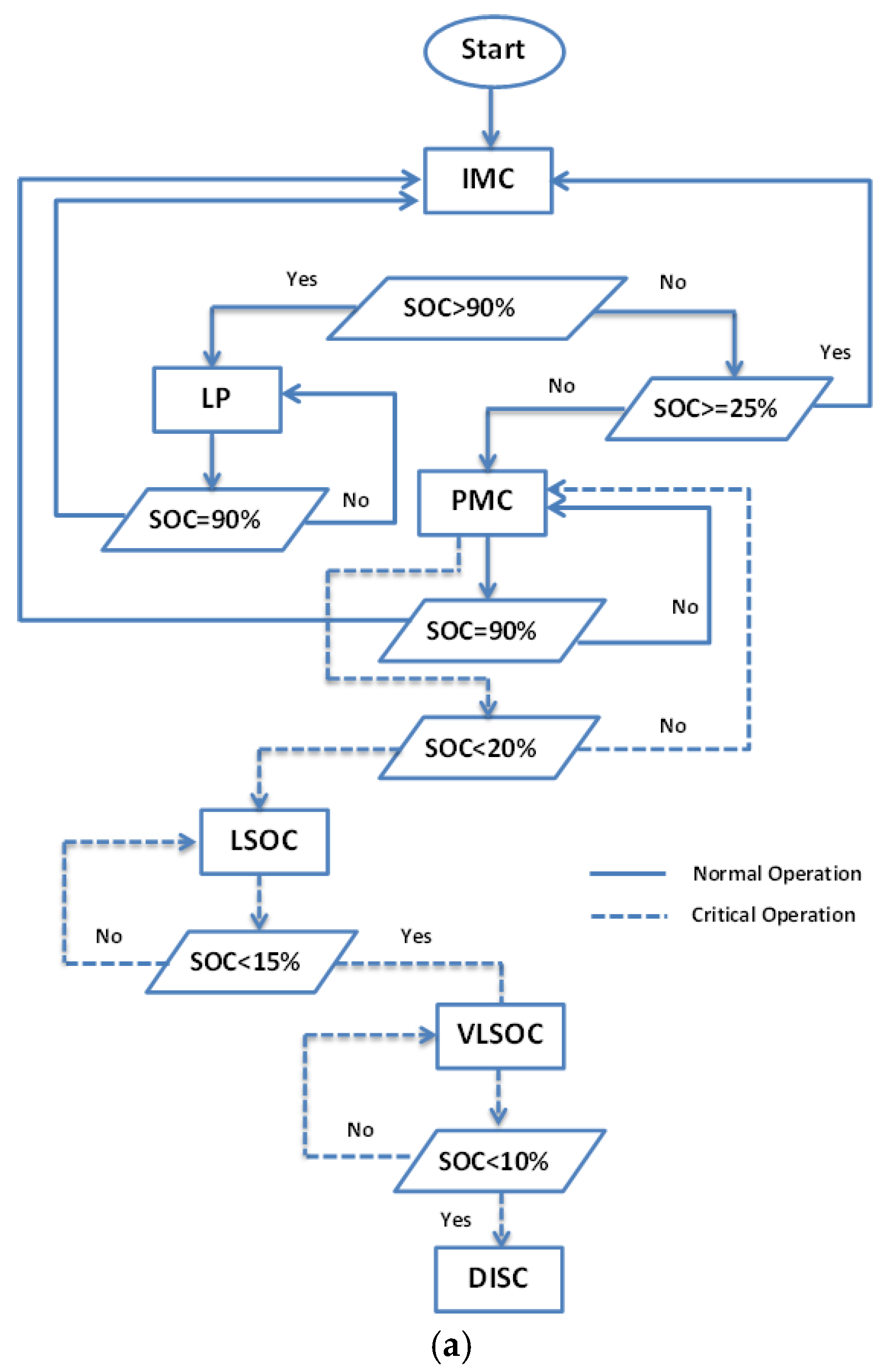
In this context, this paper proposes a new EMC for a PV-Diesel-ESS-based microgrid in a stand-alone context. The proposed EMC is based on two complimentary controls: an Isolated Mode Control (IMC), when the DG is not connected, and a Parallel Mode Control (PMC), when the DG is activated. In light of the above-discussed literature, and in addition to [
25] and [
26], where a control strategy in the PMC mode and an ESS control have been proposed, respectively, the main contributions of this paper, can be summarized as follows:
Compared to [
18], [
23], and [
24], the proposed control strategy clearly shows the transition between the IMC and PMC operating modes. Furthermore in PMC conditions, the DG is controlled to operate at its nominal power.
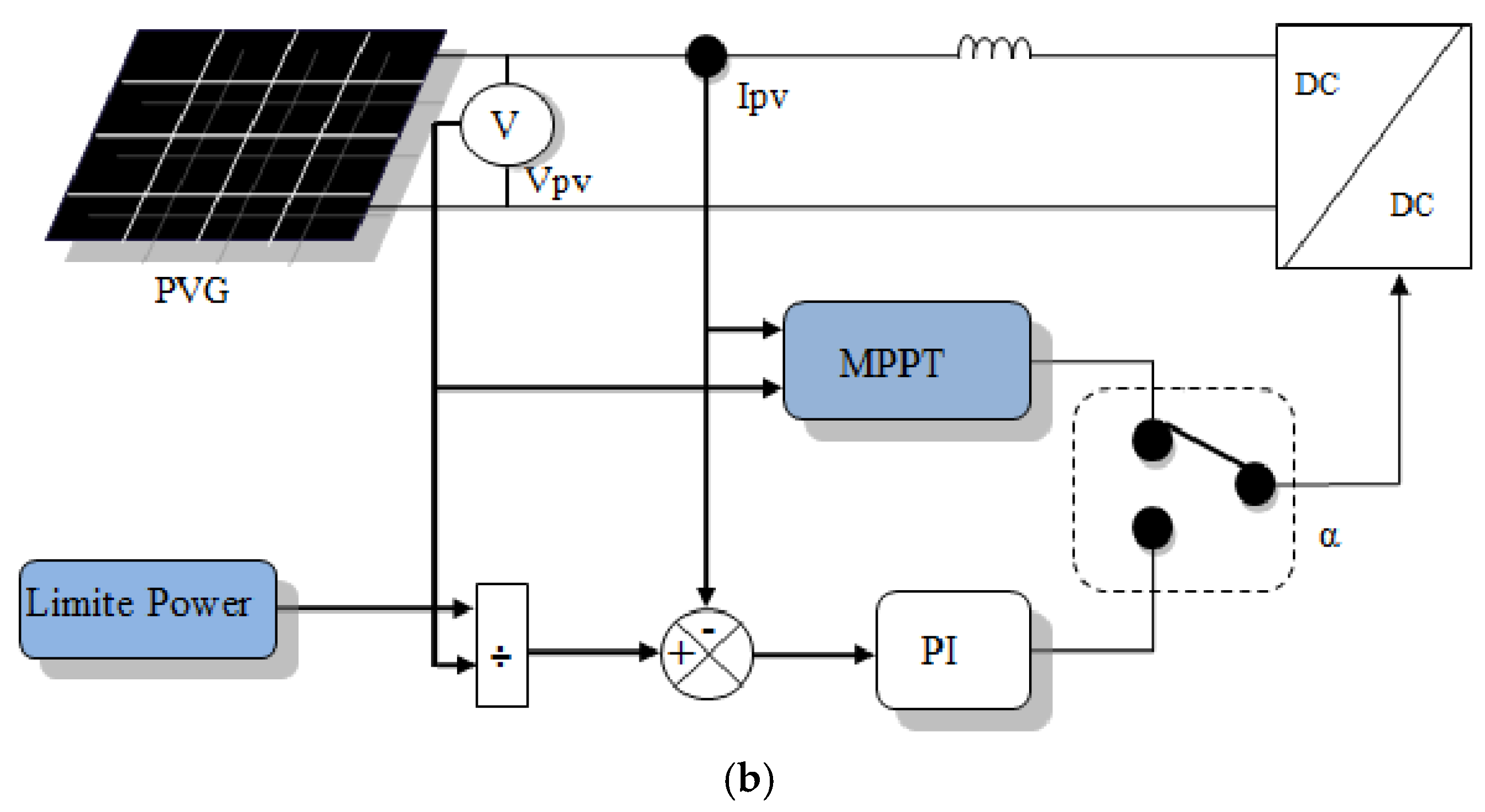
In terms of control, an IMC strategy based on resonant regulator is proposed.
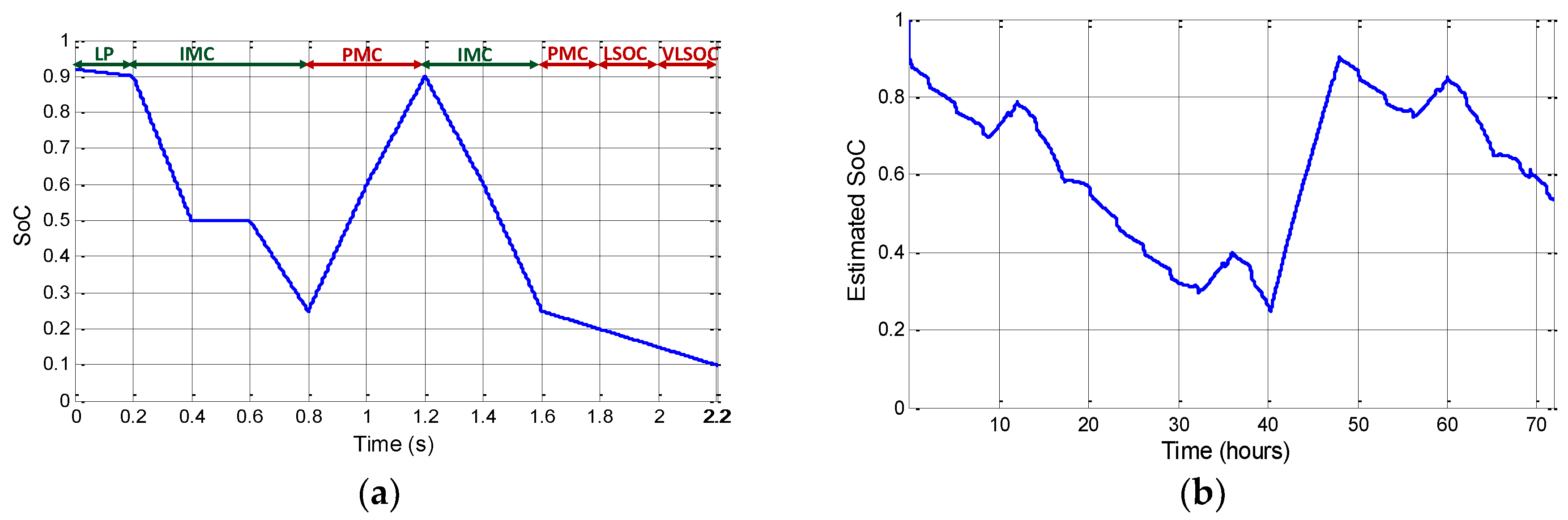
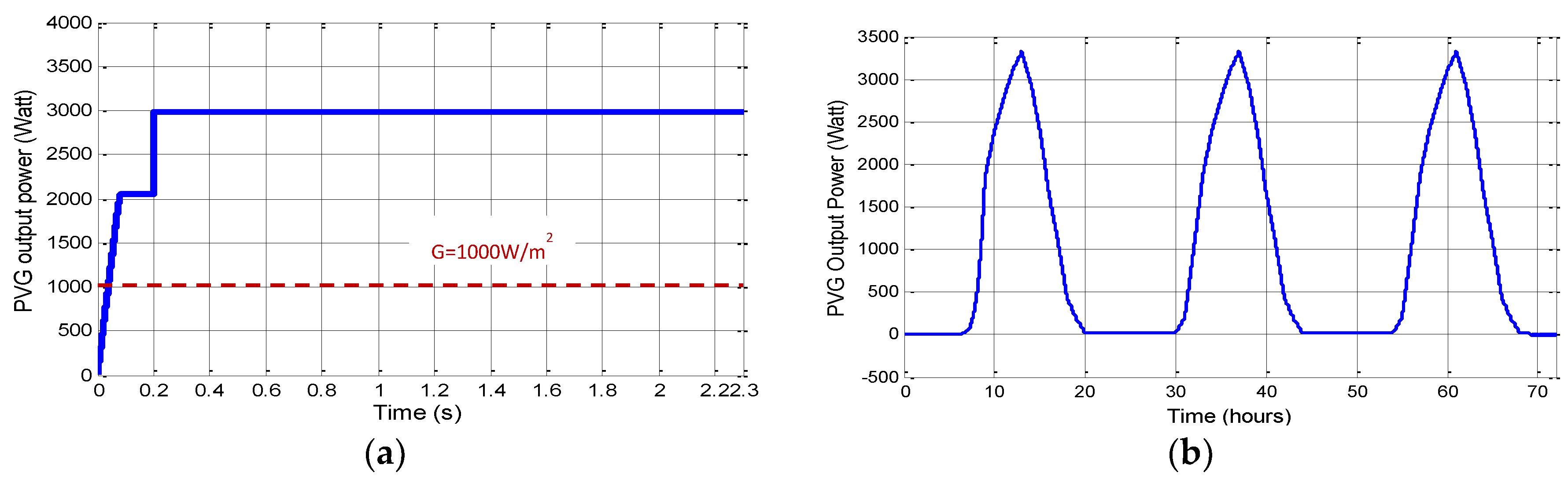
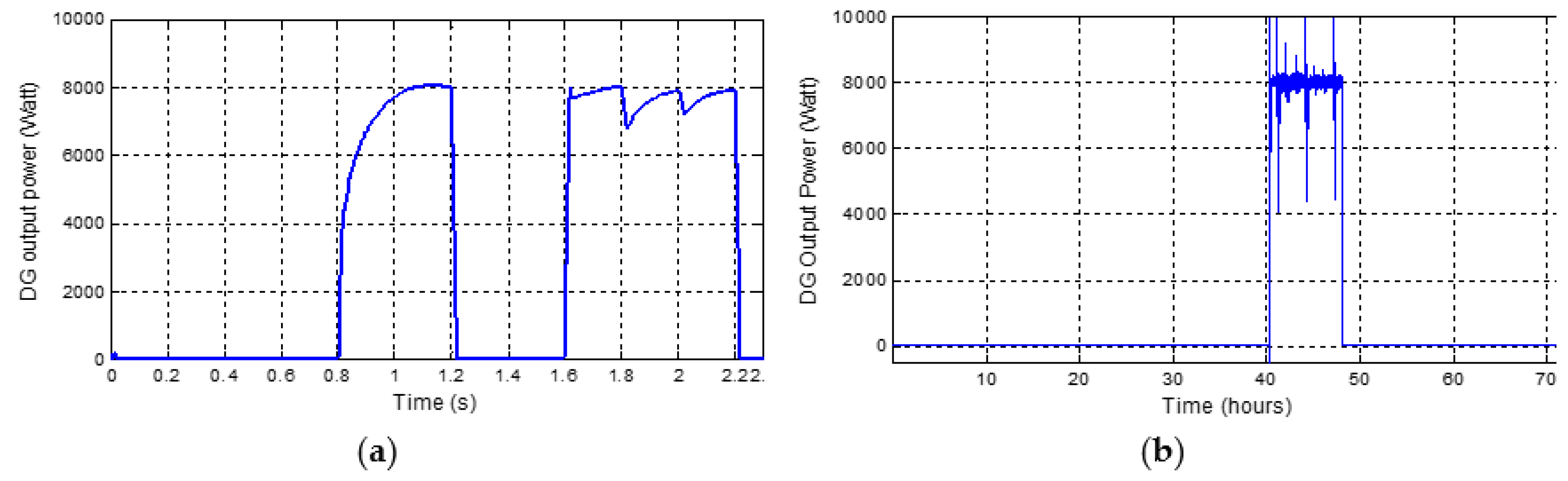
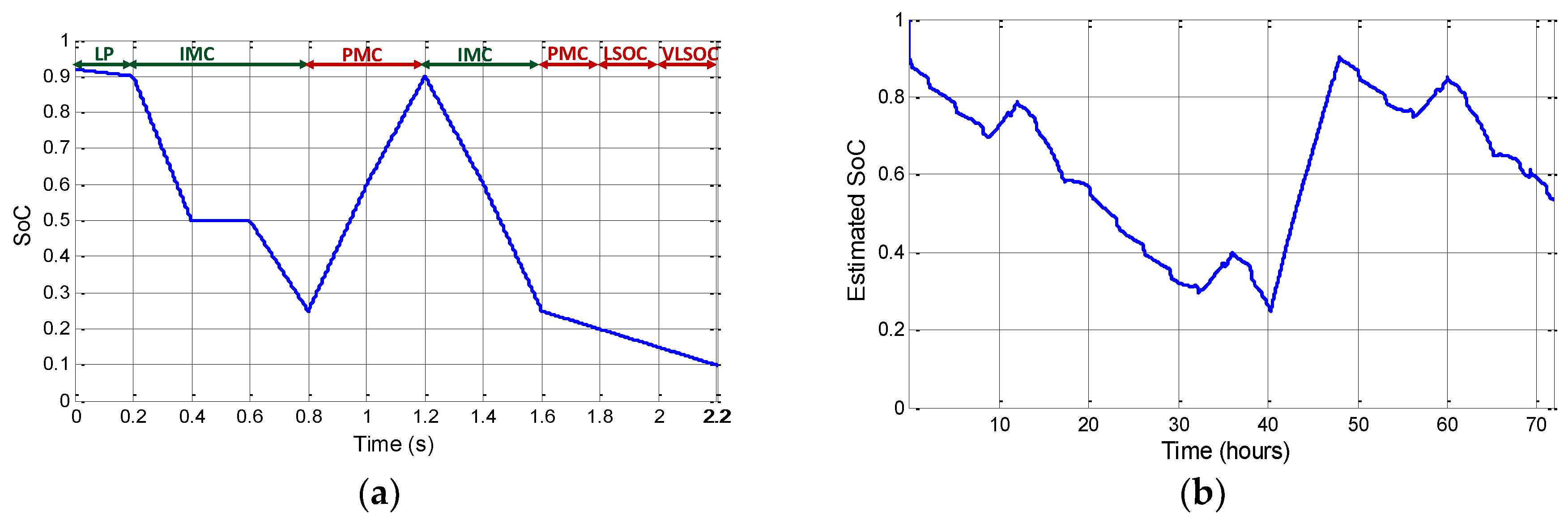
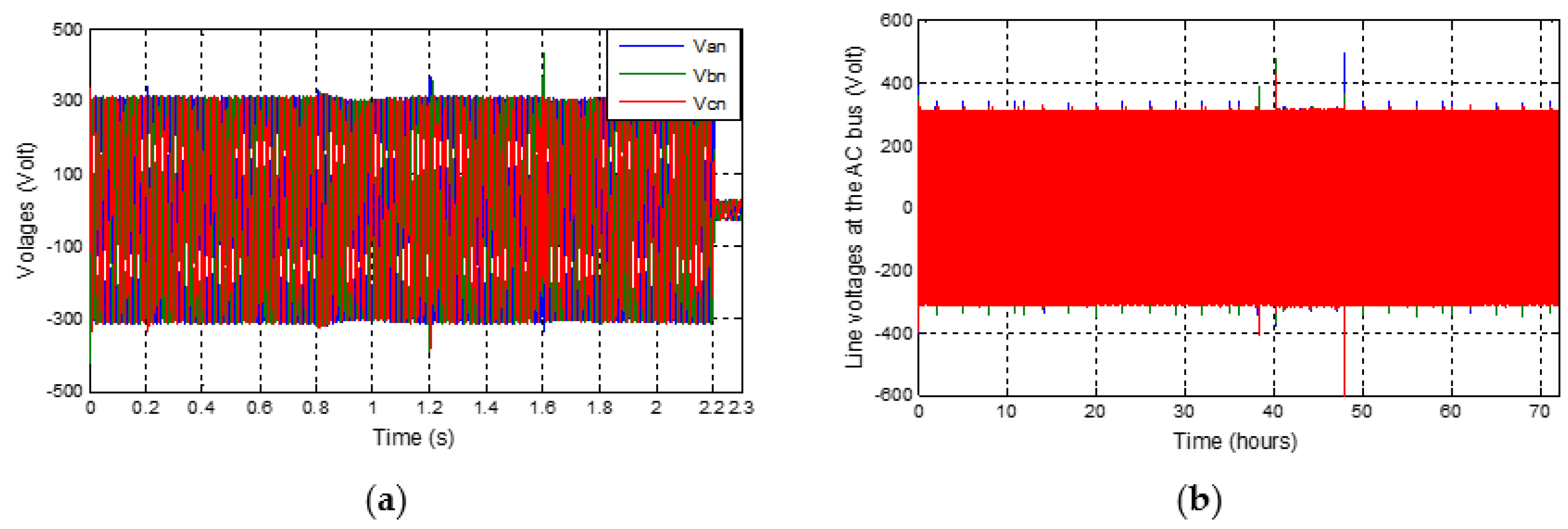
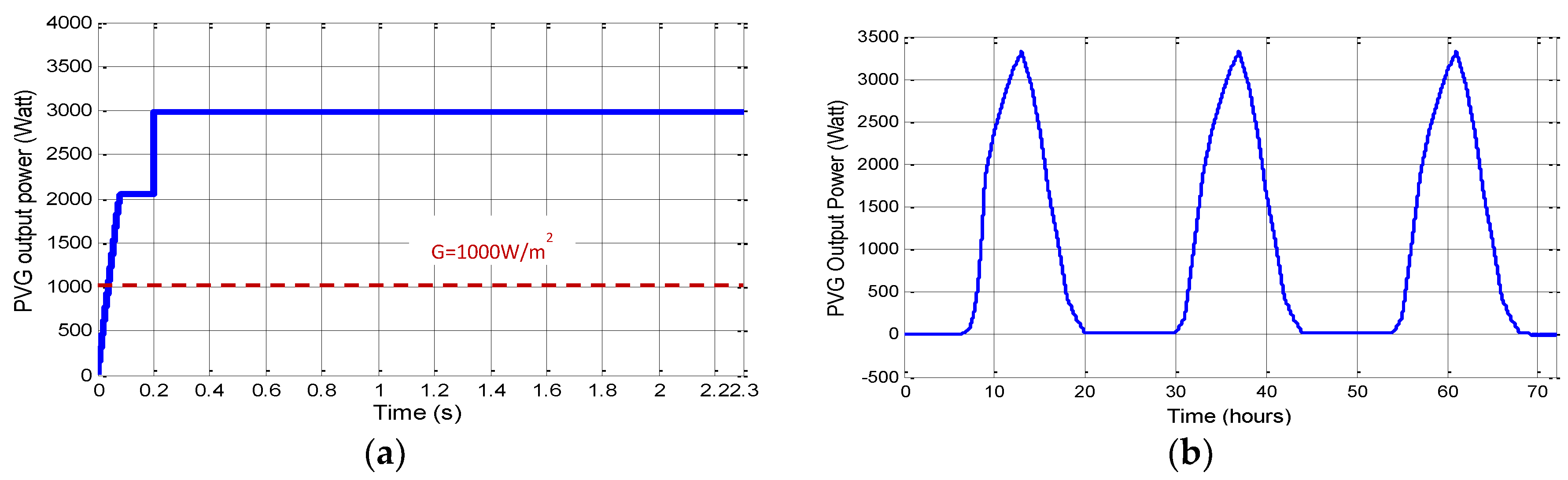
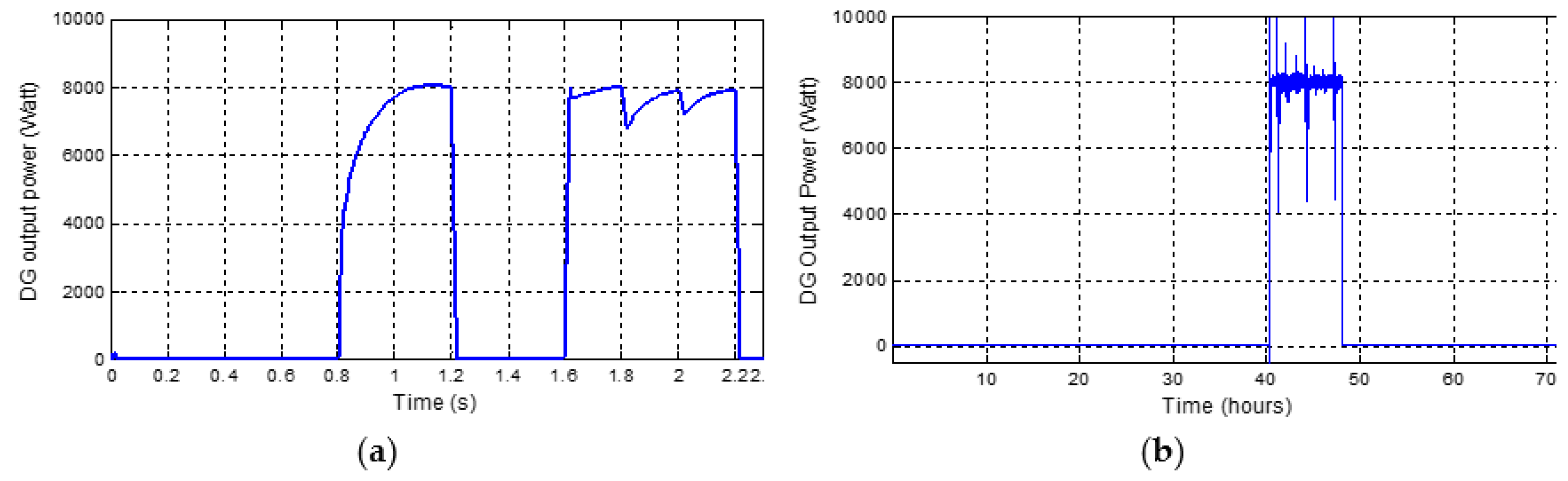
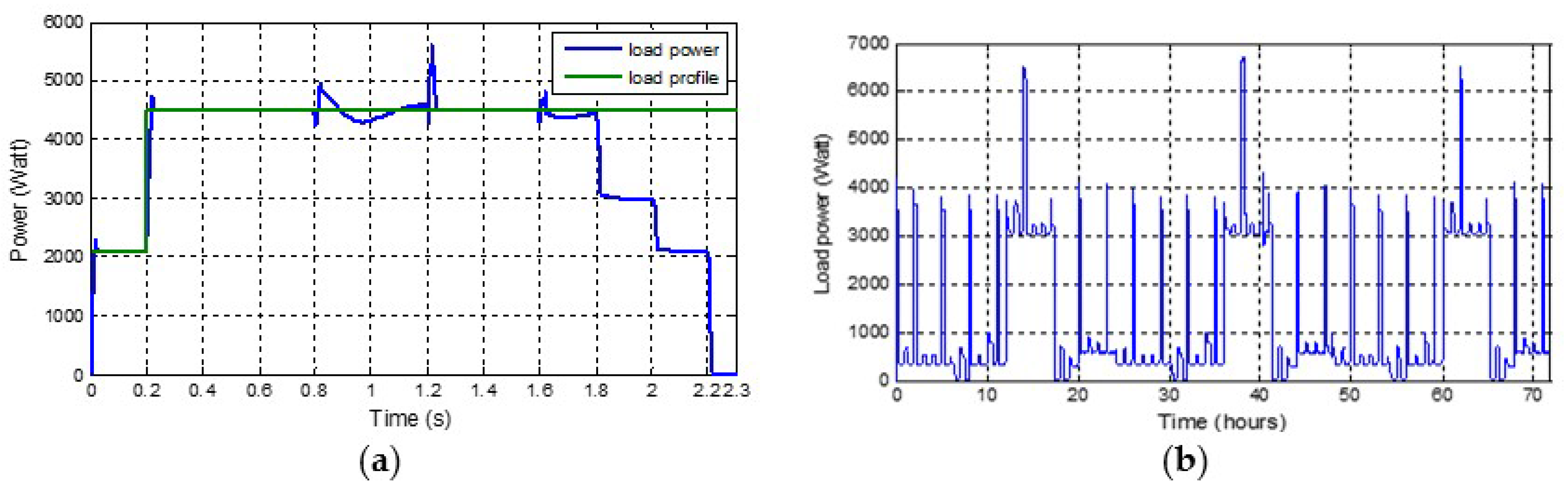
In terms of energy management, the EMC is tested first using a standard SOC profile emulating the microgrid different states. Then real data are used to simulate the load and solar radiations. Furthermore, the second case SOC profile is estimated using the system parameters and the extracted data.
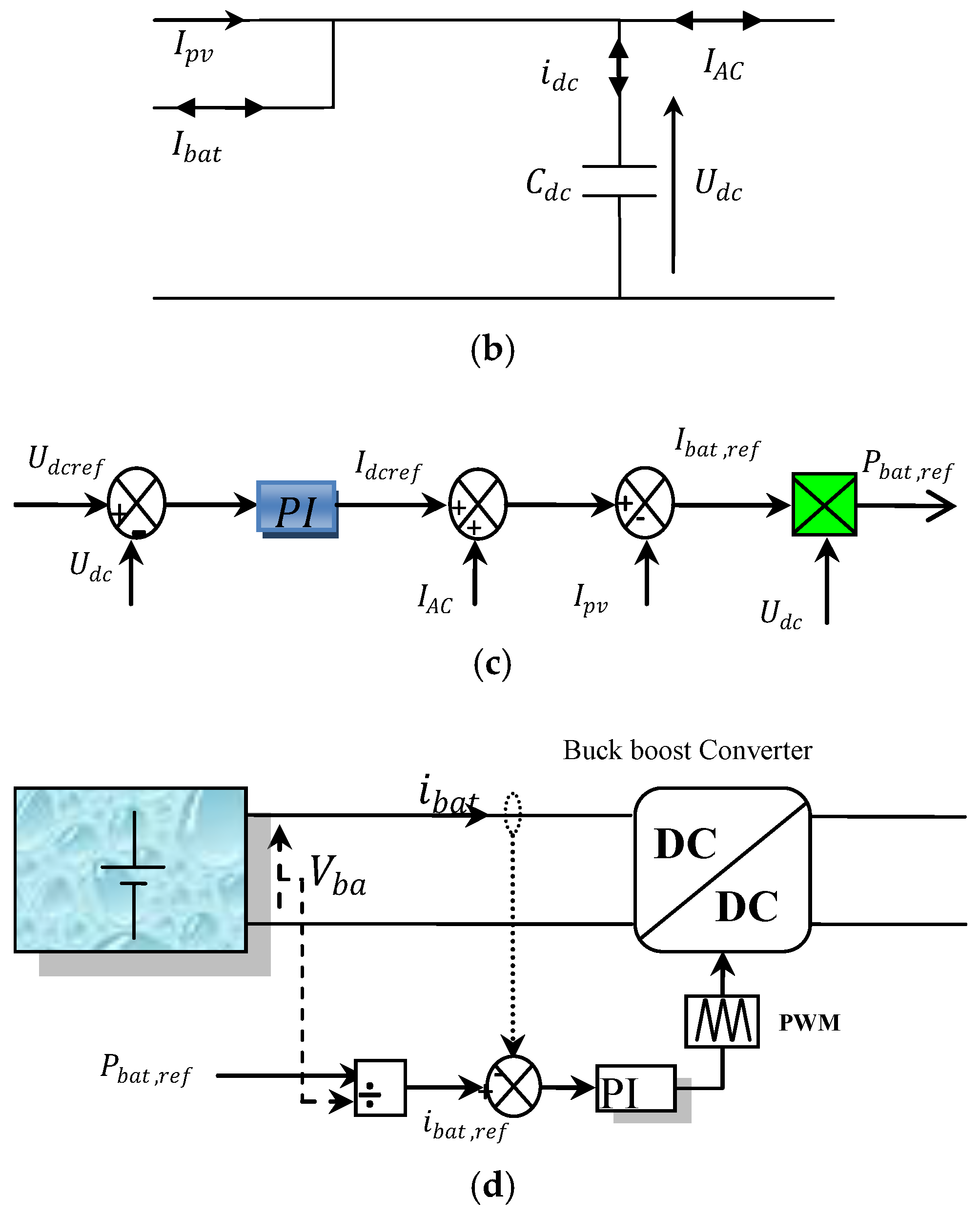
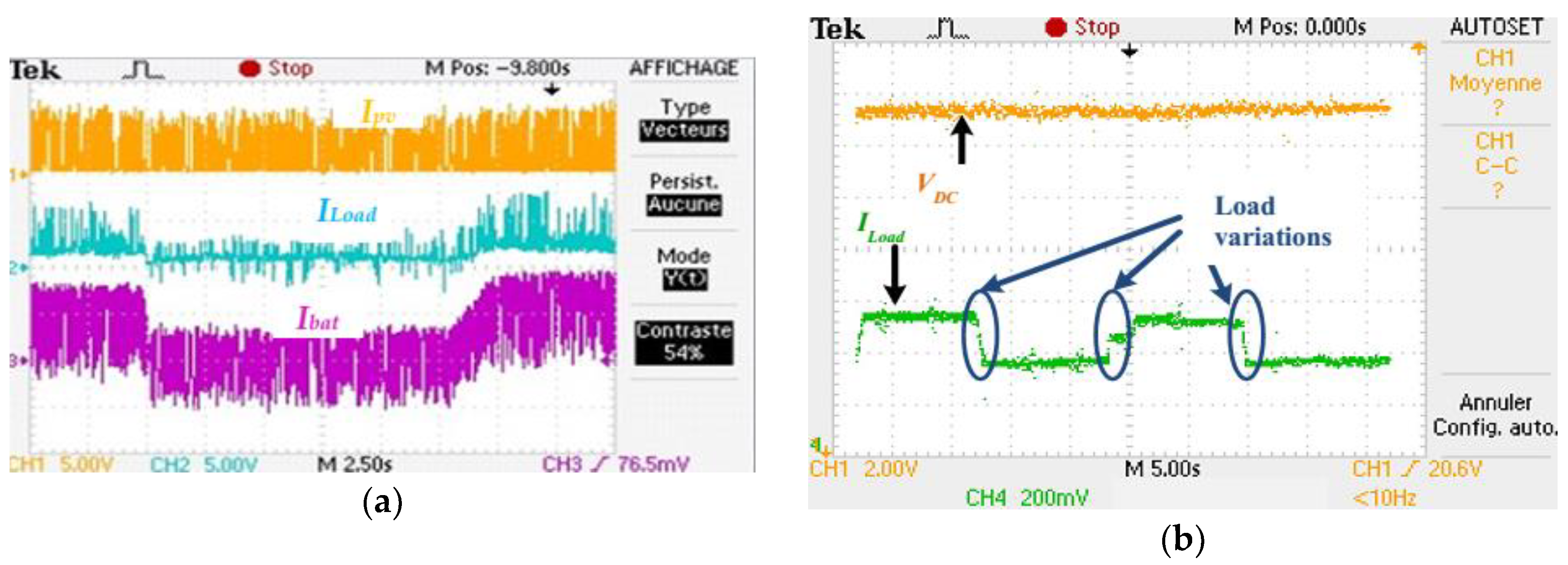
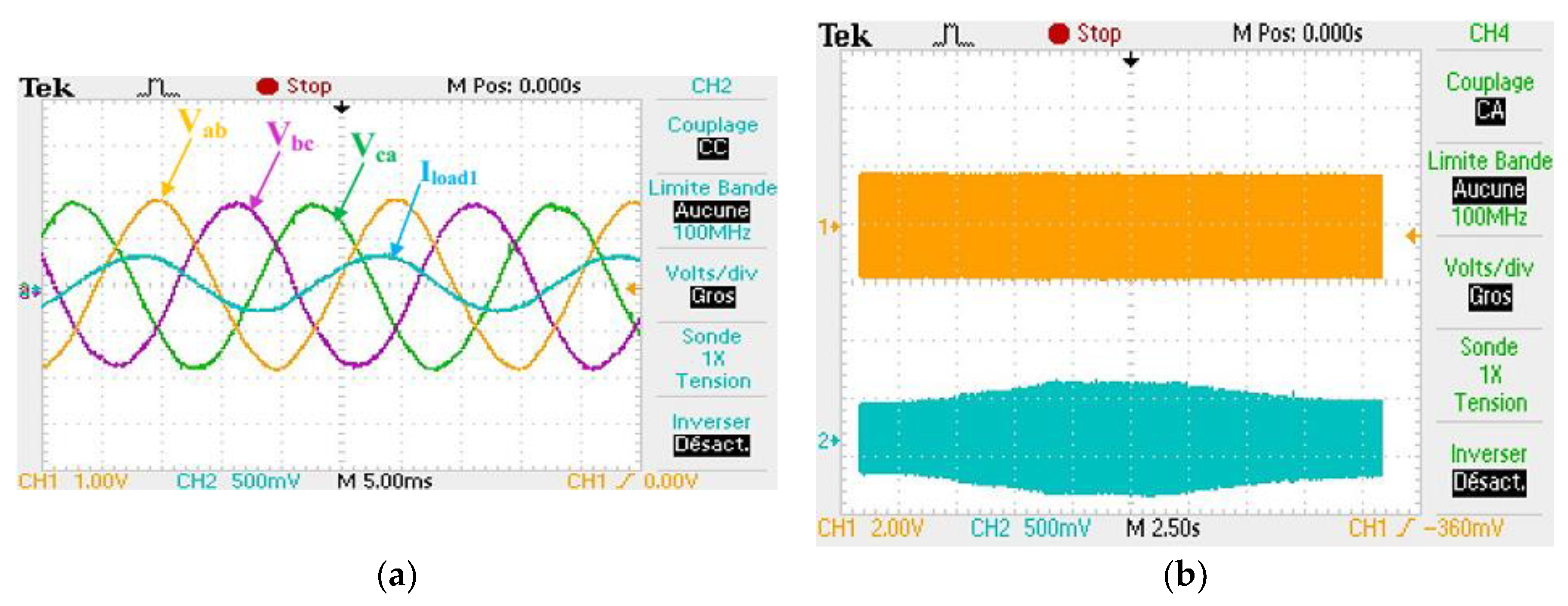
The proposed ESS control strategy, IMC operating mode, and PMC one are experimentally validated.
This paper is organized as follows.
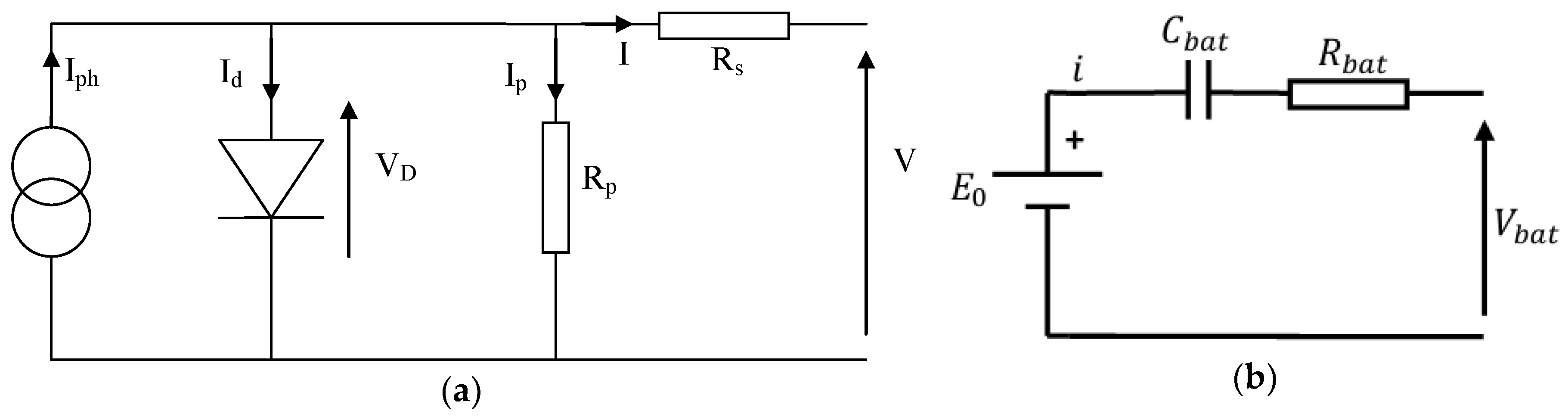
Section 2 presents the system structure and modeling.
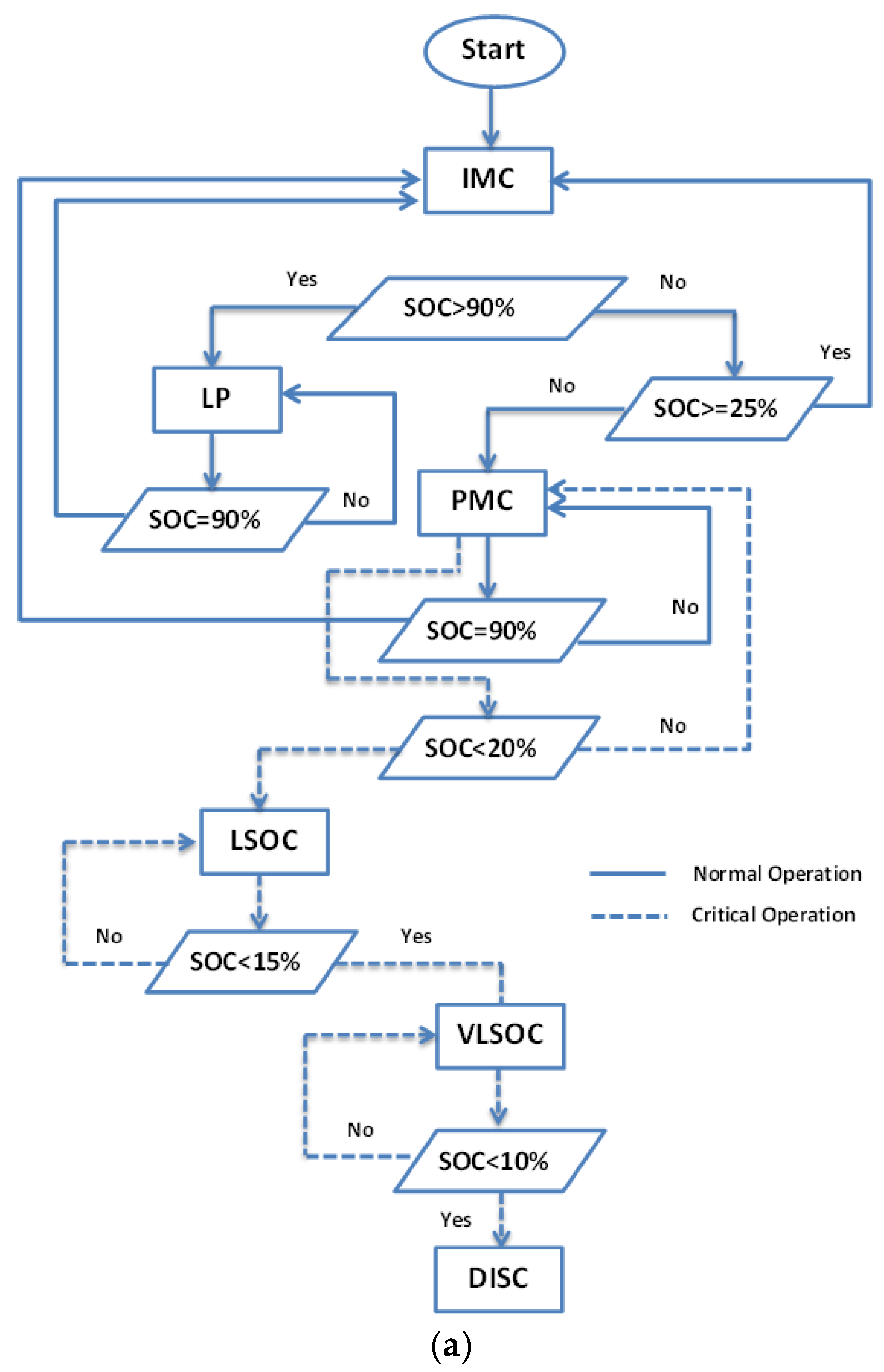
Section 3 describes the energy management control and the supervisory algorithm.
Section 4 illustrates the effectiveness of the proposed technique with simulation results and
Section 5 illustrates experimental results.
6. Conclusions
This paper dealt with the energy management control of a PV-Diesel-ESS-based microgrid in a stand-alone context. In terms of control, an isolated mode control strategy based on a resonant regulator has been proposed. In parallel mode control conditions, the diesel generator was controlled to operate at its nominal power. In this context, a supervisory algorithm optimizing the power flow between the microgrid various components ensured switching between the two modes for different possible scenarios.
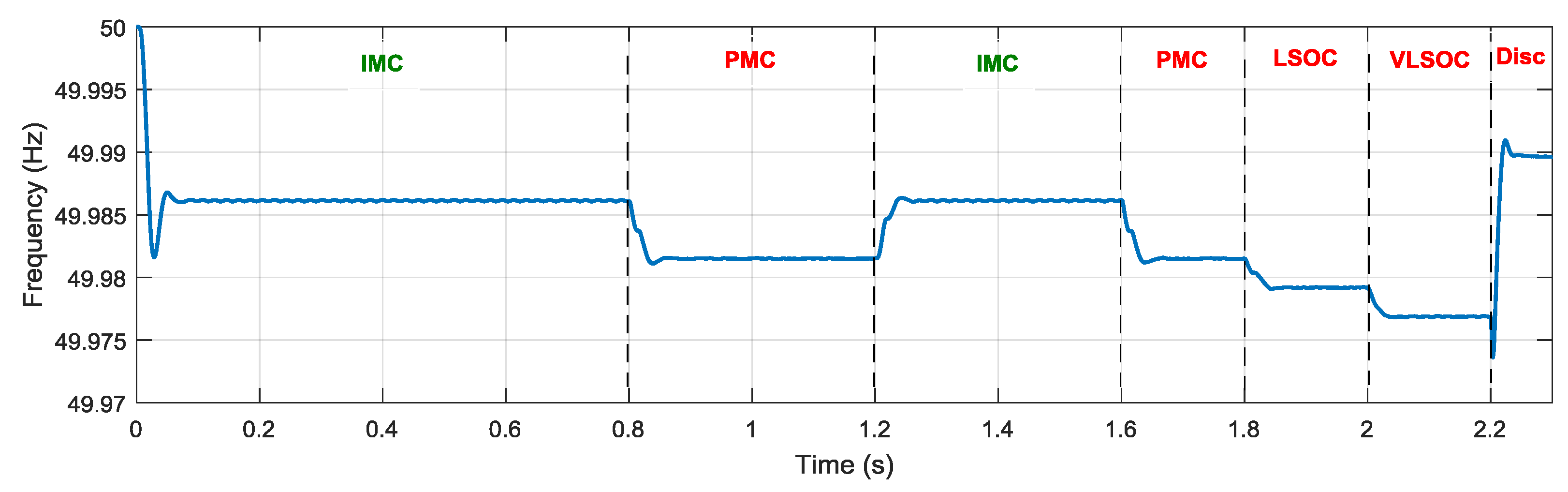
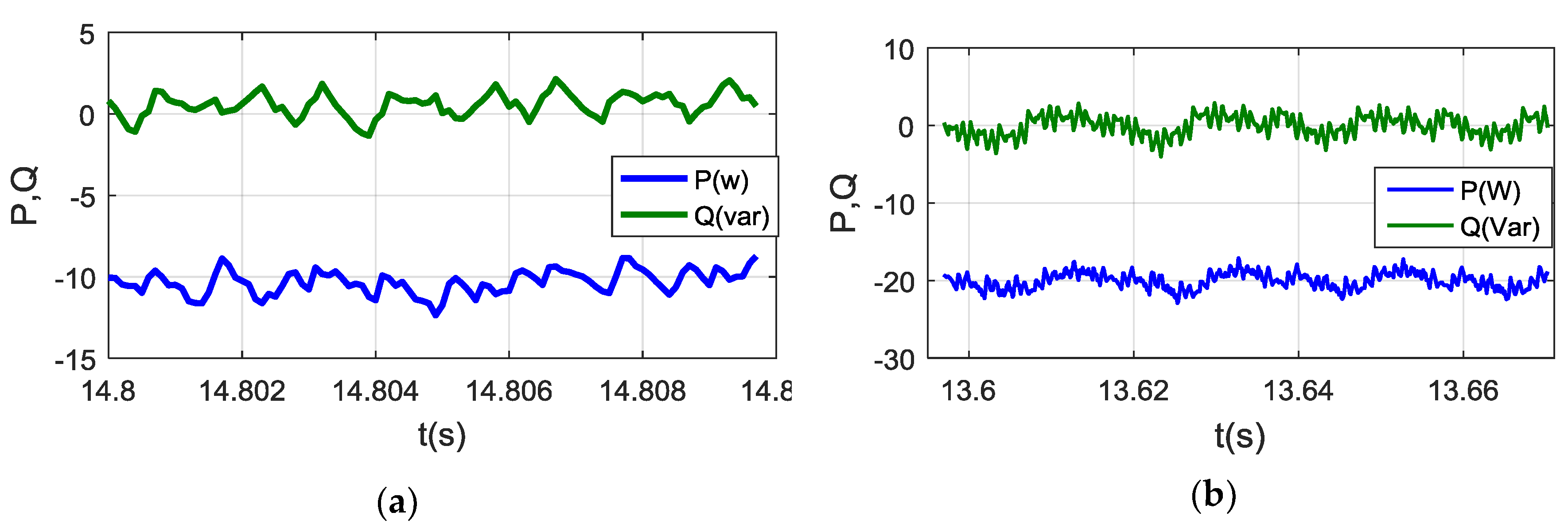
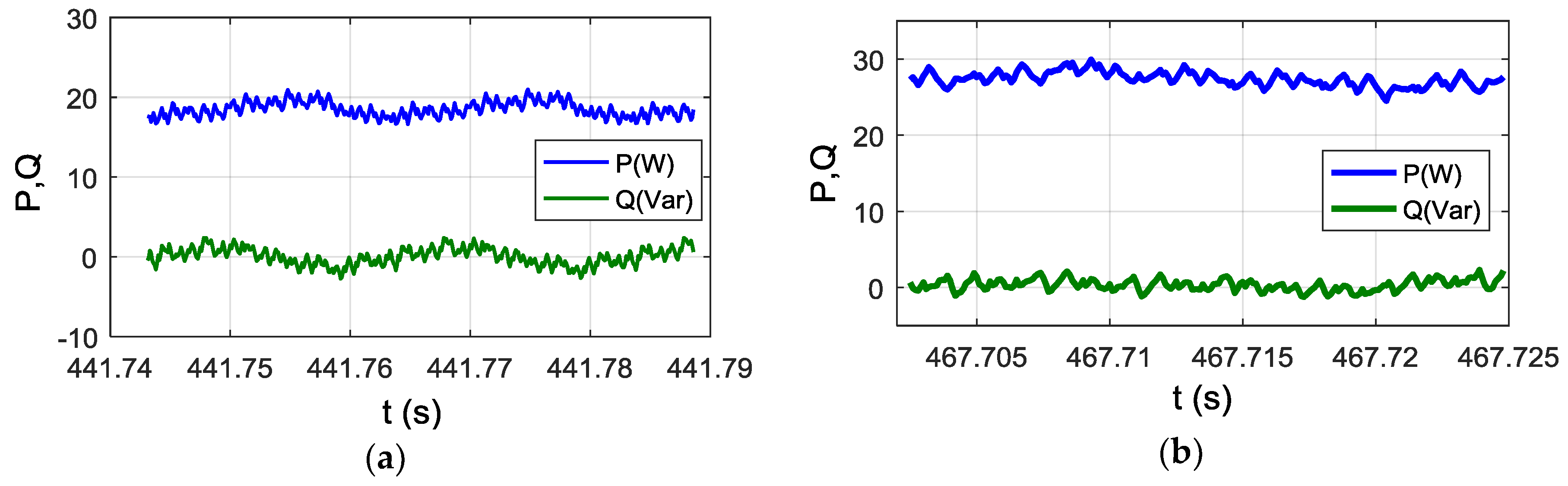
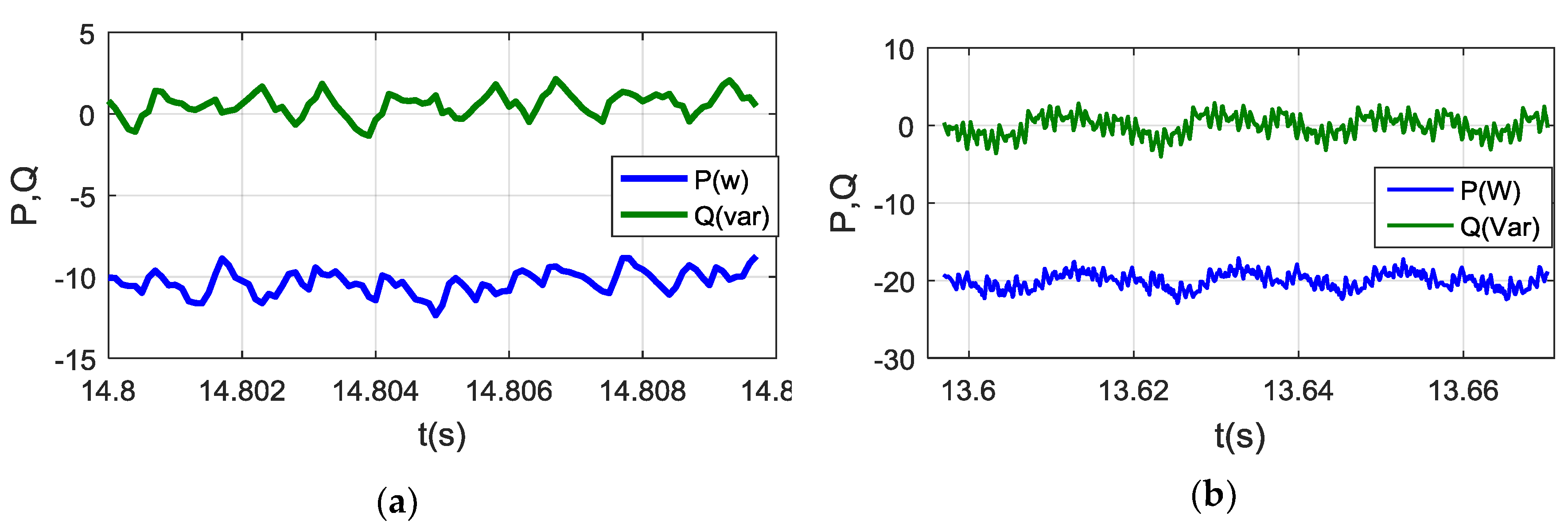
The effectiveness of the proposed control strategies has been proved first by simulations where the energy management control has been successfully tested using a standard SOC profile emulating the microgrid different states and then real data to simulate the load and solar radiations. Regarding the energy storage system, it has been clearly shown that the proposed energy management control strategy, with DG nominal operation, have allowed reducing the wear cost, leading therefore to substantial savings in terms of ESS maintenance and system cost. In terms of stability, it has been shown that the frequency fluctuation, during transition periods from an operation mode to another one, is of the order of 0.005 Hz in the IMC operation mode and does not exceed 0.025 Hz in the PMC operation mode.
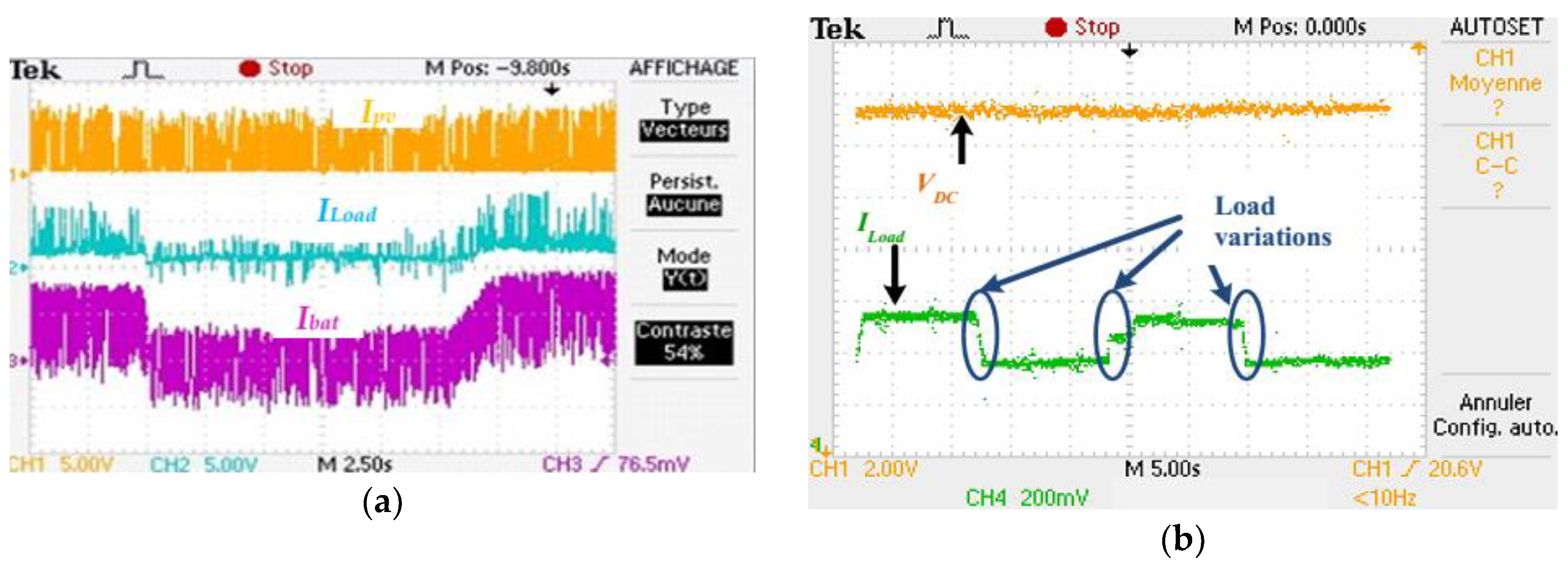
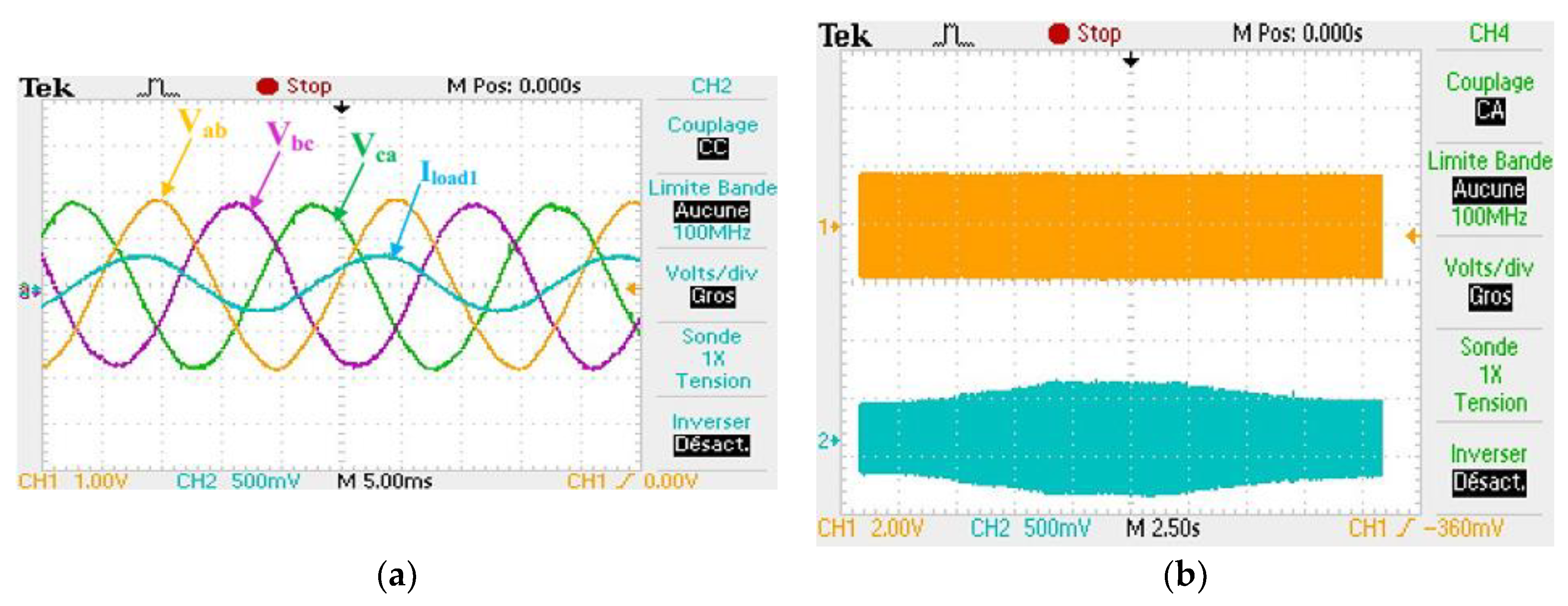
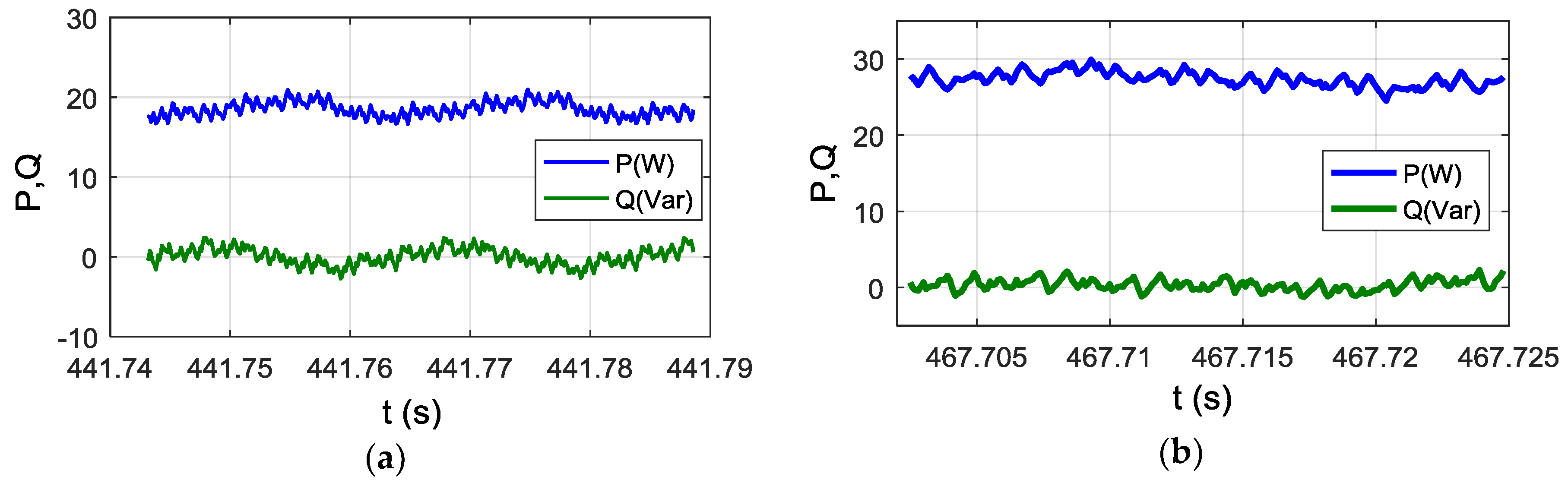
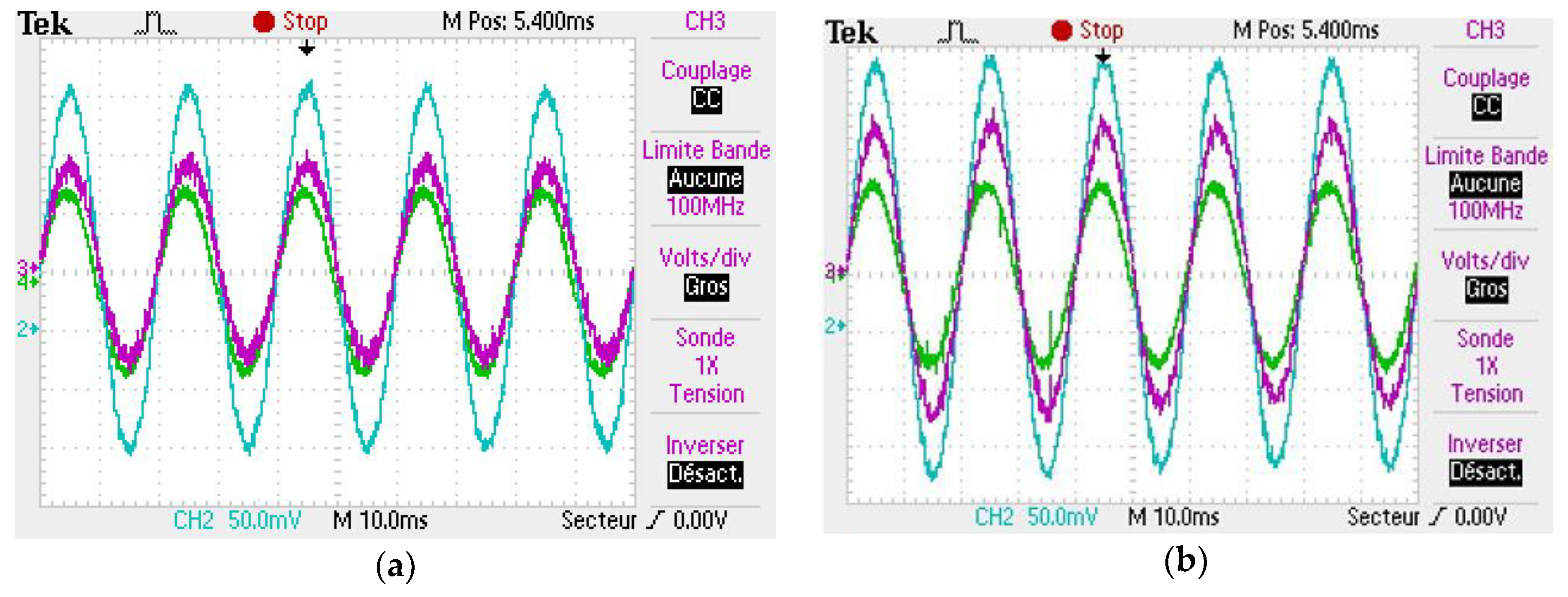
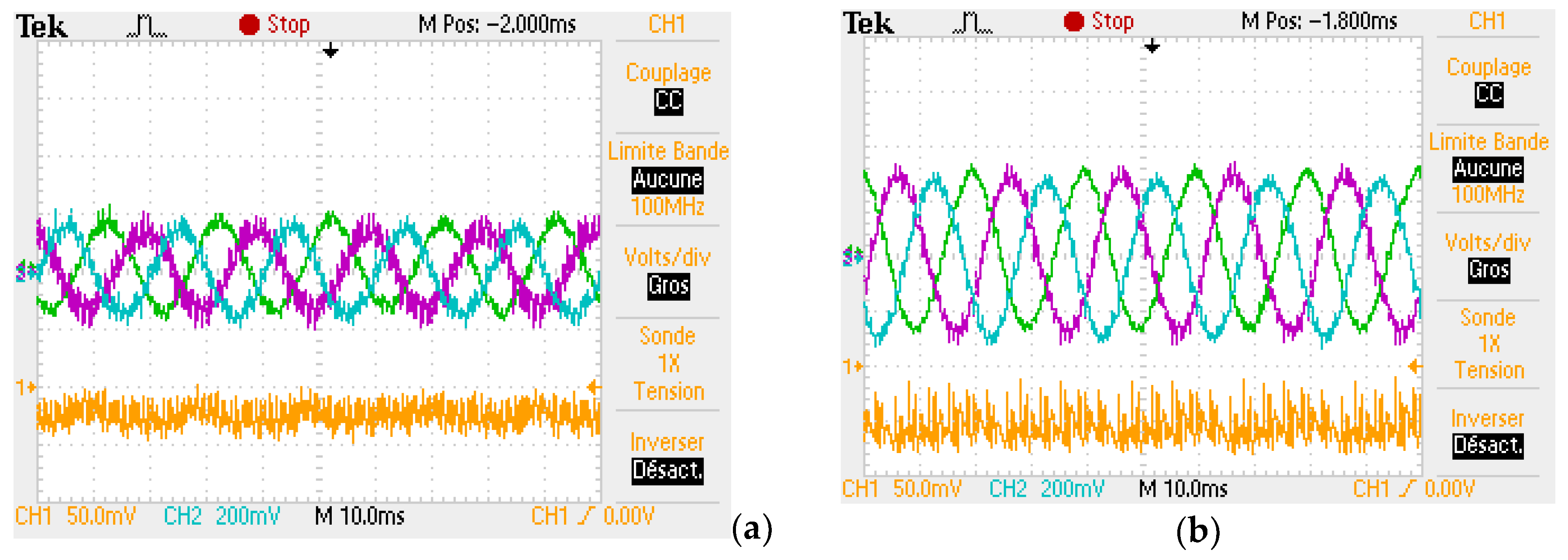
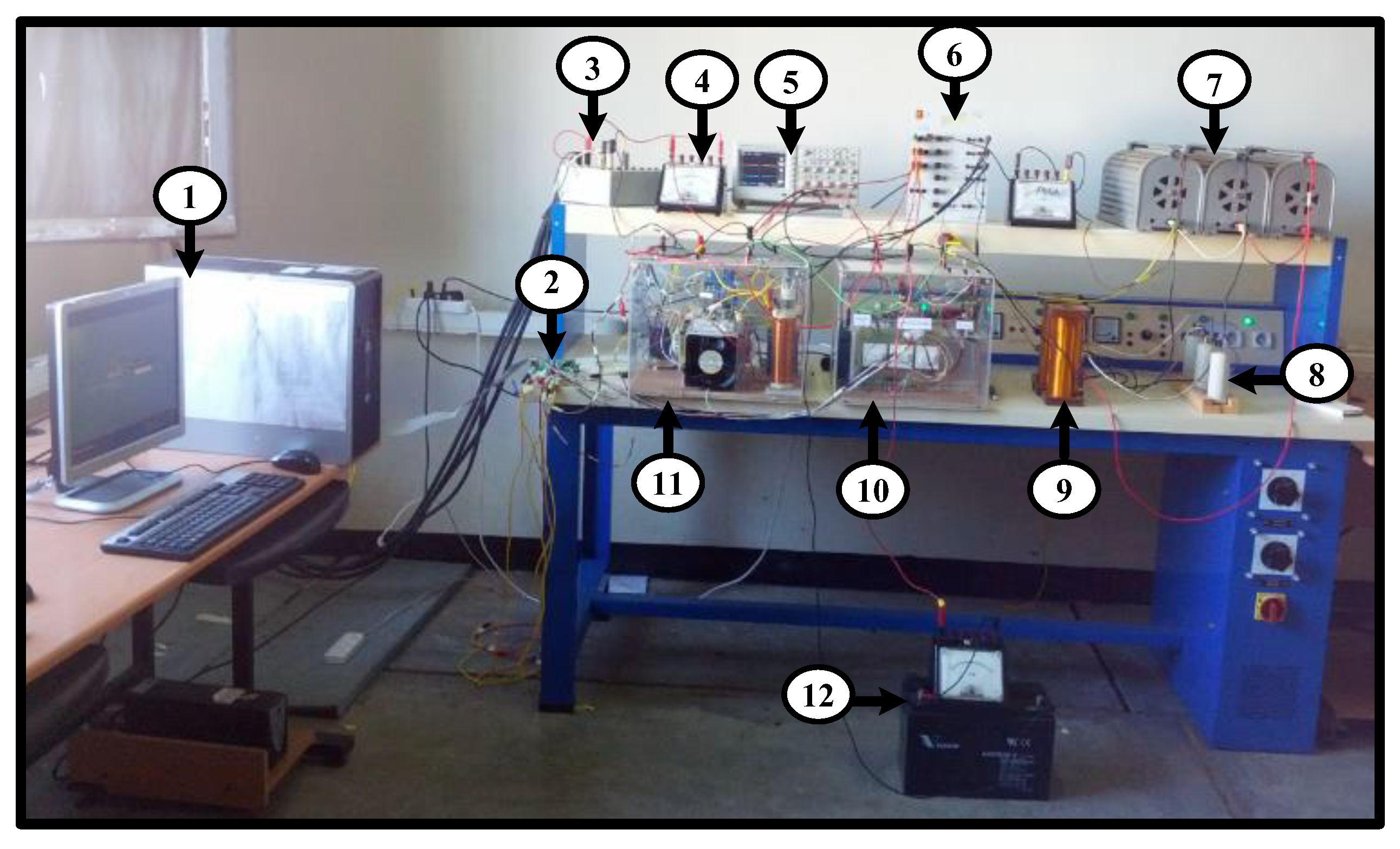
Experiments, on a reduced scale test bench, have been carried out. The achieved results clearly validate the proposed energy management control strategies along with the supervisory algorithm.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}